
Design and Simulation Analysis of a Reverse Flexible Harvesting Device for Fresh Corn
Abstract
:1. Introduction
2. Force Analysis of Panicle Collision Process
3. Structure and Working Principle of Reverse Flexible Fresh Corn Harvesting Device
4. Simulation of the Picking Process of Fresh Corn
4.1. Construction of the Simulation Model
4.2. Design of the Simulation Test
- (1)
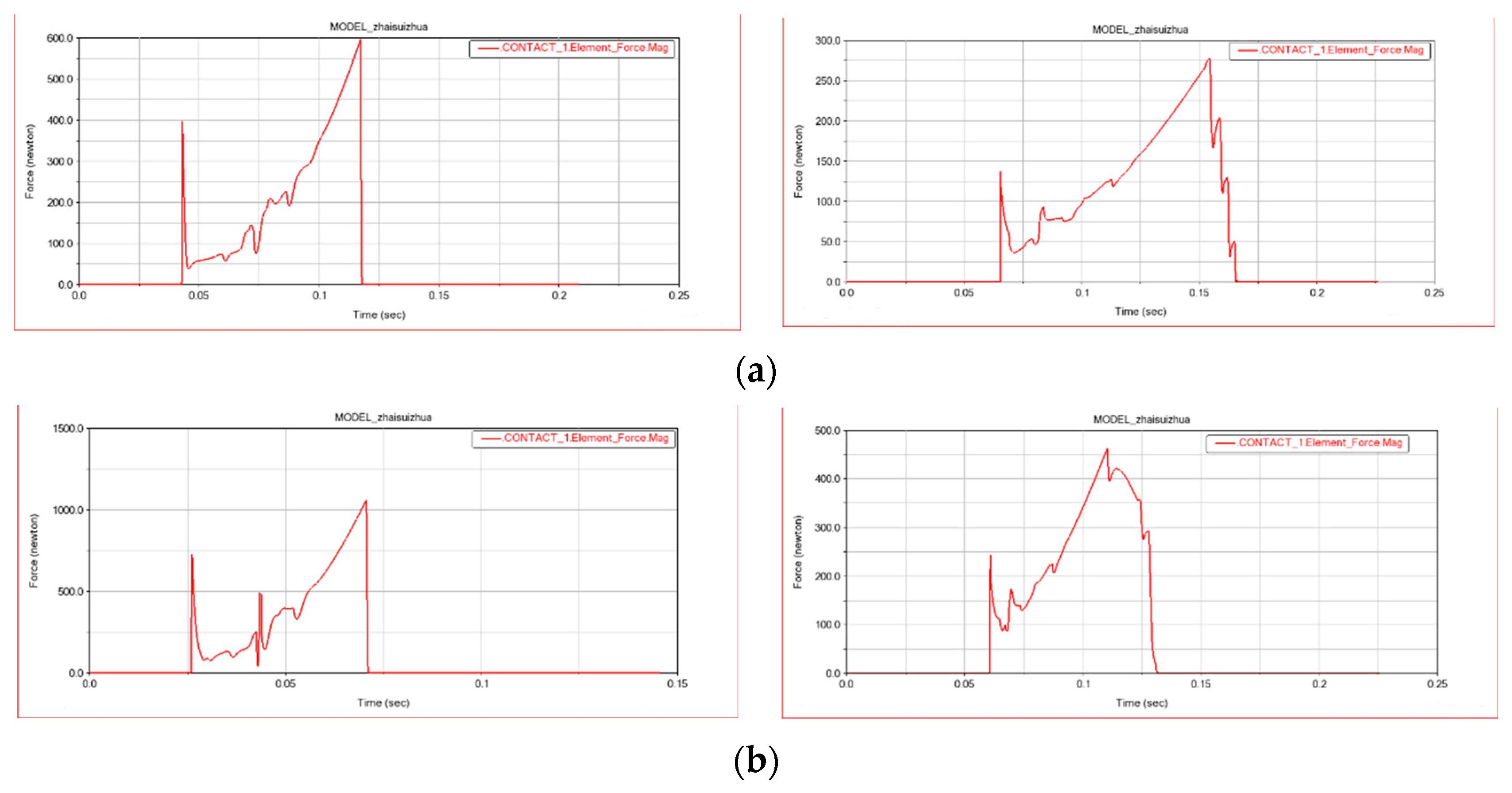
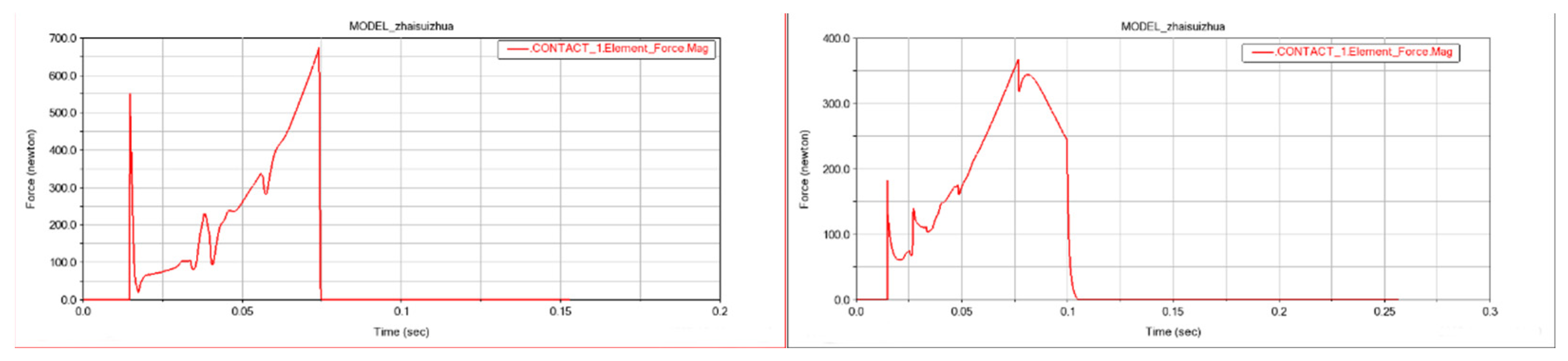
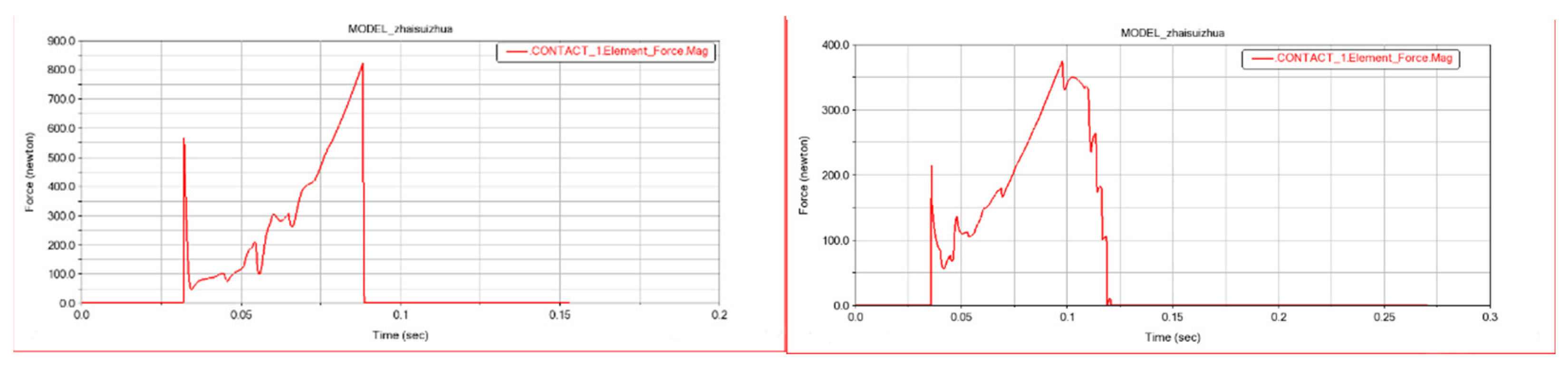
- By comparing the left and right simulation test data, it was found that the overall curve change law of the two mechanisms is similar, but compared with the rigid mechanism, the flexible buffer mechanism has an obvious effect on reducing the impact force by prolonging the action time.
- (2)
- Comparing five groups of different claw picking speeds, it was found that, when the picking speed of the claw is 1.5 m/s, it generates the minimum collision force (Figure 3a and Figure 5a), followed by 2 m/s and 2.5 m/s, and the maximum collision force is 2.71 m/s. It can be seen that the picking speed of the claw is the key factor to determine the size of the impact force, but the size of the impact force is not completely proportional to the picking speed of the claw. The best ear picking effect can be achieved only when the feeding speed and the claw picking speed achieve a certain match.
- (3)
- The five groups of different feeding speeds were compared, and it was found that, when the feeding speed is 0.5 m/s, the smallest impact force is produced (Figure 3a), followed by 1 m/s, and the maximum impact force is achieved when the speed reaches 1.5 m/s. This shows that the feeding speed is an important factor affecting the magnitude of the collision force.
5. Optimization Experiment of the Ear Picking Effect
5.1. Test Conditions and Equipment
5.2. Bench Test
5.2.1. Experimental Method
5.2.2. Experimental Design
5.3. Analysis of the Test Results
5.3.1. Regression Analysis
- (1)
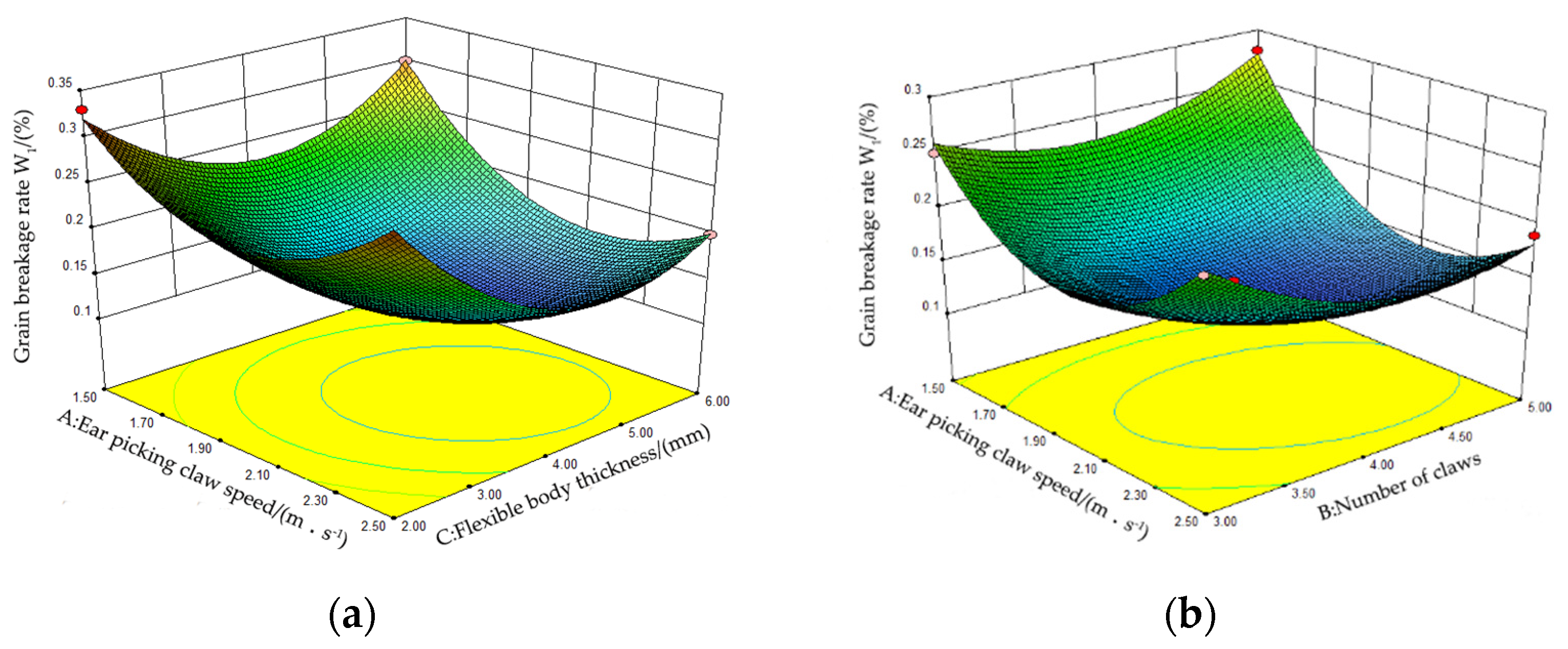
- Establishing the regression model of grain breakage rate
- (2)
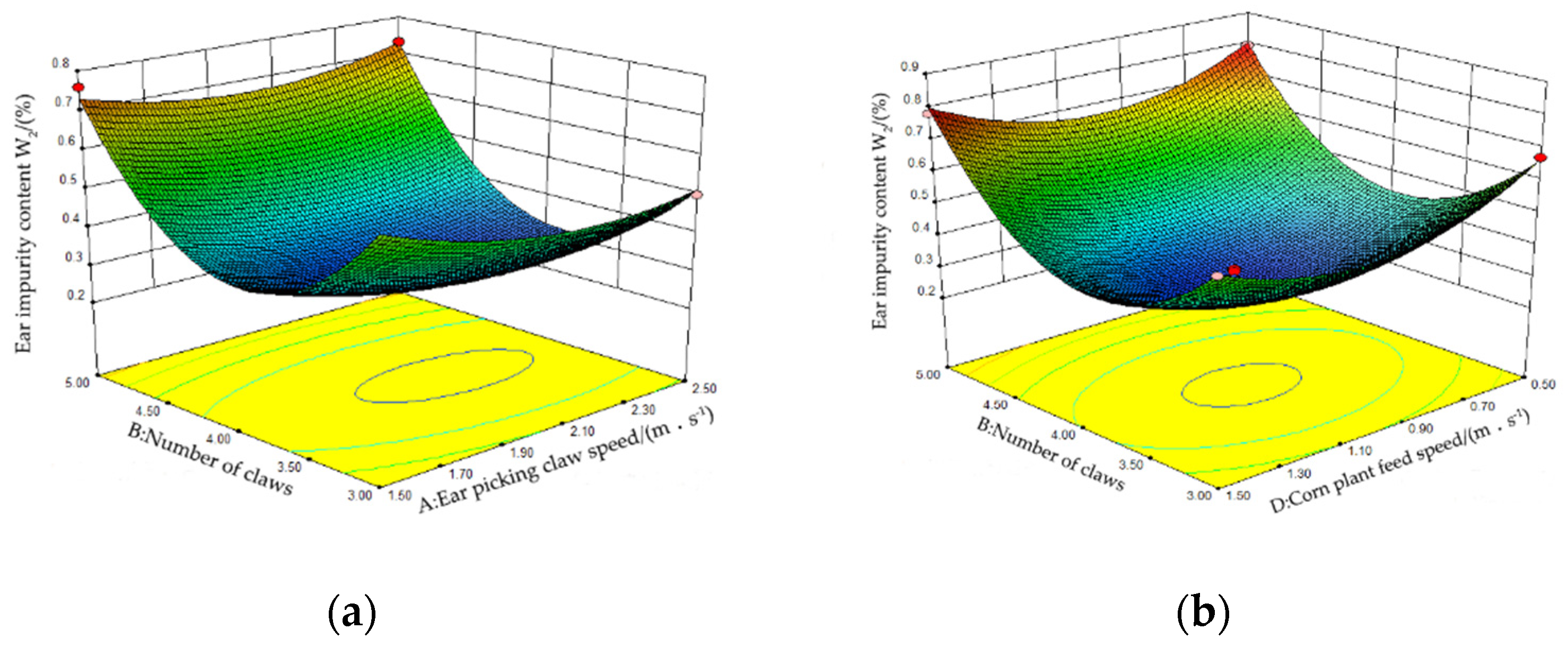
- Establish a regression model of ear impurity rate
5.3.2. Parameter Optimization
5.4. Bench Test Verification
6. Conclusions
- (1)
- The collision process between the ear picking device and the corn ear was theoretically analyzed, and a reverse flexible fresh corn ear picking device was designed. The device effectively reduced the grain breakage rate and the ear impurity content in the harvest of fresh corn ears.
- (2)
- Using ADAMS software to simulate the ear picking process of fresh corn, we analyzed the contact force between the rigid structure and flexible buffer structure under different claw picking speeds and stalk feeding speeds and obtained the optimal parameter combination: the picking claw speed was 2 m/s and the stalk feeding speed was 1 m/s.
- (3)
- The reverse flexible fresh corn harvesting bench was built for experimental verification, and the experimental data were optimized and analyzed using Design-Expert 8.0.6. The optimal parameter combination of each experimental factor was obtained: the speed of picking claw was 2 m/s; the number of claws was four; the thickness of the flexible body was 4 mm; the feeding speed of the stem was 1 m/s, with a corresponding grain breakage rate of 0.12%; and the ear impurity content was 0.29%.
- (4)
- The optimized parameter combination was selected, and the bench test was conducted again to verify that the grain crushing rate was 0.128%; the relative error of the predicted value was 0.008%, which is far lower than the national standard of 0.5%. The ear impurity content was 0.3%, and the relative error of the predicted value was 0.01%, which is far lower than the national standard of 2%. The optimized prediction model is reliable.
7. Patents
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ji, X.; Geng, D.; Yao, Y.; Du, J.; Zhu, J.; Xu, H. Design and Experiment of Corn Harvester Vibration Picking Device. Trans. Chin. Soc. Agric. Mach. 2020, 51, 126–133. [Google Scholar]
- Li, R.; Hao, Q. Analysis on corn deep processing industry in china. J. Chin. Agric. Mech. 2013, 34, 8–12. [Google Scholar]
- Jia, X. Study on the Relationship between Supply and Demand in China’s Corn Market; Chinese Academy of Agricultural Sciences: Beijing, China, 2014. [Google Scholar]
- Wang, Y.; Zhang, Q.; Yu, L. The Present Situation of Corn Snapping Device and its Expectation. J. Agric. Mech. Res. 2011, 1, 228–231. [Google Scholar]
- Geng, D.; Zhang, D.; Wang, X.; Yang, Z. New Agricultural Mechanics; National Defense Industry Press: Beijing, China, 2011. [Google Scholar]
- Shang, W.; Sun, C. Status development suggestions of self-propelled snapping corn harvester. J. Chin. Agric. Mech. 2016, 37, 203–206. [Google Scholar]
- Wang, X.; Geng, L.; Li, X.; Pang, J.; Zhou, H. Design and Experiment of Low-injury Picking Test Table for Fresh-eating Maize. Agric. Eng. 2017, 7, 68–71. [Google Scholar]
- Li, K. Design and Experimental Study on Gap-adjustable Combined Ear-Picking Mechanism of Corn. Ph.D. Thesis, China Agricultural University, Beijing, China, 2018. [Google Scholar]
- Li, T. Design and Experiment on Flexible Low-lossFresh Corn Picking Device. Master’s Thesis, Northeast Agricultural University, Harbin, China, 2019. [Google Scholar]
- Cheng, X.; Jia, X.; Chen, M.; Li, Q. Experiment and analysis on test device of corn ear picking by pulling stalk upwards. Trans. Chin. Soc. Agric. Eng. 2016, 32, 50–55. [Google Scholar]
- Xu, W.; Zhao, J.; Cui, X.; Li, Q.; Jin, C. The Bionics Design and Analysis on Device of Corn Picking with Dragging and Cutting Stem. J. Agric. Mech. Res. 2018, 7, 81–86. [Google Scholar]
- Zhang, L.; Li, Q. Speed of bionic breaking corn ear hand and experiment on power consumption. Trans. Chin. Soc. Agric. Eng. 2015, 31, 9–14. [Google Scholar]
- Chen, M.; Cheng, X.; Jia, X.; Zhang, L.; Li, Q. Optimization of operating parameter and structure for corn ear picking device by bionic breaking ear hand. Trans. Chin. Soc. Agric. Eng. 2018, 34, 15–22. [Google Scholar]
- Zhu, G.; Li, T.; Zhou, F.; Wang, W. Design and experiment of bionic ear picking device for fresh corn. J. Jilin Univ. Eng. Technol. Ed. 2022. [Google Scholar] [CrossRef]
- Zhu, G.; Li, T.; Zhou, F. Design and experiment of flexible clamping and conveying device for bionic ear picking of fresh corn. J. Jilin Univ. Eng. Technol. Ed. 2022, 52, 2486–2500. [Google Scholar]
- Kondoyanni, M.; Loukatos, D.; Maraveas, C.; Drosos, C.; Arvanitis, K.G. Bio-Inspired Robots and Structures toward Fostering the Modernization of Agriculture. Biomimetics 2022, 7, 69. [Google Scholar] [CrossRef] [PubMed]
- Romano, D.; Wahi, A.; Miraglia, M.; Stefanini, C. Development of a Novel Underactuated Robotic Fish with Magnetic Transmission System. Machines 2022, 10, 755. [Google Scholar] [CrossRef]
- Huang, Q. Development Status and Countermeasures of Fresh Corn Harvesting Mechanization in China. China South. Agric. Mach. 2018, 49, 60. [Google Scholar]
- Shin, C.S.; Yun, T.Y.; Choi, H.; Kim, T. Experimental Study on the Structural Safety of the Corn Harvester attached to a Tractor. J. Korean Soc. Manuf. Process Eng. 2020, 19, 24–29. [Google Scholar] [CrossRef]
- Zhu, J.; Chen, J. Analysis of current situation and technical characteristics of domestic and foreign corn harvesting machinery. Agric. Technol. Equip. 2010, 23–24+26. [Google Scholar] [CrossRef]
- Weng, L. Status of Corn Production in China and Its Countermeasures. Food Nutr. China 2010, 1, 22–25. [Google Scholar]
- Wen, B. Mechanical Design Manual, 5th ed.; China Machine Press: Beijing, China, 2010; Volume 6. [Google Scholar]
- Anonymous. Material Contact Parameter of Impact Force Part [EB/OL]. Available online: http://www.docin.com/p-2338295663.html (accessed on 16 November 2022).
- Ge, Y. Test Design Method and Application of Design Expert Software; Harbin University of Technology Press: Harbin, China, 2014; pp. 155–164. [Google Scholar]
- Cao, W.; Yang, S.; Li, S.; Jiao, H.; Lian, G.; Niu, C.; An, L. Parameter optimization of height limiting device for comb-type safflower harvesting machine. Trans. Chin. Soc. Agric. Eng. 2019, 35, 48–56. [Google Scholar]
- Yang, Q.; Wang, Q.; Li, H.; He, J.; Lu, C.; Yu, C.; Lou, S.; Wang, Y. Development of layered fertilizer amount adjustment device of pneumatic centralized variable fertilizer system. Trans. Chin. Soc. Agric. Eng. 2020, 36, 1–10. [Google Scholar]
- Zhang, Z.; Han, C.; Li, C. Application of Response Surface Method in Experimental Designand Optimization. J. Henan Inst. Educ. Nat. Sci. Ed. 2011, 20, 34–37. [Google Scholar]
- Wang, Y.; Chen, H.; Lin, Q. Optimization of parameters of blackcurrant harvesting mechanism. Optim. Parameters Blackcurrant Harvest. Mech. 2009, 25, 79–83. [Google Scholar]
- Liu, S.; Shang, S.; Yang, R.; Zheng, Y.; Zhao, D.; Zhao, J. Test and optimization of parameters for the storing device of plot seeder. Trans. Chin. Soc. Agric. Eng. 2010, 26, 101–108. [Google Scholar]
- GB/T 21962-2020; Corn Combine Harvester. China Standards Press: Beijing, China, 2020.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material Type | Stiffness /(N·mm−1) | Force Exponent | Damping /(N·s·mm−1) | Penetration Depth/(mm) | Static Coefficient | Dynamic Coefficient |
|---|---|---|---|---|---|---|
| Steel–wood | 2855 | 1.5 | 0.57 | 0.1 | 0.3 | 0.25 |
| Rubber–wood | 2855 | 1.1 | 0.57 | 0.1 | 0.5 | 0.25 |
| Codes | Factors | |
|---|---|---|
| Corn Plant Feeding Speed/(m·s−1) | Ear Picking Claw Speed/(m·s−1) | |
| 1.147 | 0.29 | 1.29 |
| 1 | 0.5 | 1.5 |
| 0 | 1 | 2 |
| −1 | 1.5 | 2.5 |
| −1.147 | 1.71 | 2.71 |
| Codes | Factors | |||
|---|---|---|---|---|
| Ear Picking Claw Speed A/(m·s−1) | Number of Claws B | Flexible Body Thickness C | Corn Plant Feed Speed D/(m·s−1) | |
| 1 | 1.5 | 3 | 2 | 0.5 |
| 0 | 2 | 4 | 4 | 1 |
| −1 | 2.5 | 5 | 6 | 1.5 |
| No. | Factors | Grain Breakage Rate W1/(%) | Ear Impurity Content W2/(%) | |||
|---|---|---|---|---|---|---|
| Ear Picking Claw Speed A/(m·s−1) | Number of Claws B | Flexible Body Thickness C | Corn Plant Feed Speed D/(m·s−1) | |||
| 1 | −1 | 0 | 0 | −1 | 0.14 | 0.43 |
| 2 | 0 | 1 | 0 | −1 | 0.17 | 0.59 |
| 3 | −1 | 0 | −1 | 0 | 0.2 | 0.31 |
| 4 | 0 | −1 | −1 | 0 | 0.19 | 0.68 |
| 5 | −1 | 0 | 1 | 0 | 0.32 | 0.39 |
| 6 | 1 | 0 | 0 | −1 | 0.21 | 0.51 |
| 7 | 1 | 1 | 0 | 0 | 0.25 | 0.62 |
| 8 | 0 | 0 | −1 | −1 | 0.16 | 0.41 |
| 9 | 0 | −1 | 0 | −1 | 0.13 | 0.78 |
| 10 | 0 | 0 | 0 | 0 | 0.11 | 0.27 |
| 11 | 0 | 0 | −1 | 1 | 0.16 | 0.46 |
| 12 | 0 | −1 | 1 | 0 | 0.27 | 0.7 |
| 13 | 1 | 0 | 1 | 0 | 0.33 | 0.38 |
| 14 | 1 | 0 | 0 | 1 | 0.23 | 0.5 |
| 15 | 1 | 0 | −1 | 0 | 0.3 | 0.38 |
| 16 | 1 | −1 | 0 | 0 | 0.28 | 0.76 |
| 17 | 0 | 0 | 1 | −1 | 0.2 | 0.45 |
| 18 | −1 | 1 | 0 | 0 | 0.24 | 0.5 |
| 19 | 0 | 0 | 0 | 0 | 0.12 | 0.29 |
| 20 | 0 | 1 | −1 | 0 | 0.24 | 0.5 |
| 21 | 0 | 1 | 0 | 1 | 0.18 | 0.67 |
| 22 | 0 | 0 | 0 | 0 | 0.14 | 0.3 |
| 23 | 0 | 0 | 0 | 0 | 0.13 | 0.31 |
| 24 | 0 | 1 | 1 | 0 | 0.26 | 0.54 |
| 25 | 0 | −1 | 0 | 1 | 0.15 | 0.79 |
| 26 | −1 | −1 | 0 | 0 | 0.19 | 0.73 |
| 27 | 0 | 0 | 1 | 1 | 0.26 | 0.48 |
| Source | Sum of Squares | df | Mean Squares | F Value | p-Value Prob > F |
|---|---|---|---|---|---|
| Model | 0.11 | 12 | 9.178 × 10−3 | 84.15 | <0.0001 ** |
| A | 9.075 × 10−3 | 1 | 9.075 × 10−3 | 83.21 | <0.0001 ** |
| B | 1.408 × 10−3 | 1 | 1.408 × 10−3 | 12.91 | 0.0024 ** |
| C | 0.013 | 1 | 0.013 | 116.22 | <0.0001 ** |
| D | 1.875 × 10−3 | 1 | 1.875 × 10−3 | 17.19 | 0.0008 ** |
| AB | 1.600 × 10−3 | 1 | 1.600 × 10−3 | 14.67 | 0.0015 ** |
| AC | 2.025 × 10−3 | 1 | 2.025 × 10−3 | 18.57 | 0.0005 ** |
| BC | 9.000 × 10−4 | 1 | 9.000 × 10−4 | 8.25 | 0.0111 * |
| CD | 9.000 × 10−4 | 1 | 9.000 × 10−4 | 8.25 | 0.0111 * |
| A2 | 0.040 | 1 | 0.040 | 365.72 | <0.0001 ** |
| B2 | 9.573 × 10−3 | 1 | 9.573 × 10−3 | 87.78 | <0.0001 ** |
| C2 | 0.042 | 1 | 0.042 | 389.41 | <0.0001 ** |
| D2 | 5.352 × 10−4 | 1 | 5.352 × 10−4 | 4.91 | 0.0416 |
| Residual | 1.745 × 10−3 | 16 | 1.091 × 10−4 | ||
| Lack of Fit | 1.225 × 10−3 | 12 | 1.021 × 10−4 | 0.79 | 0.6663 |
| Pure Error | 5.200 × 10−4 | 4 | 1.300 × 10−4 | ||
| Cor Total | 0.11 | 28 |
| Source | Sum of Squares | df | Mean Squares | F Value | p-Value Prob > F |
|---|---|---|---|---|---|
| Model | 0.72 | 12 | 0.060 | 84.15 | <0.0001 ** |
| A | 7.008 × 10−3 | 1 | 7.008 × 10−3 | 83.21 | <0.0001 ** |
| B | 0.087 | 1 | 0.087 | 12.91 | 0.0024 ** |
| C | 3.333 × 10−3 | 1 | 3.333 × 10−3 | 116.22 | <0.0001 ** |
| D | 4.408 × 10−3 | 1 | 4.408 × 10−3 | 17.19 | 0.0008 ** |
| AB | 2.025 × 10−3 | 1 | 2.025 × 10−3 | 14.67 | 0.0015 ** |
| AC | 1.600 × 10−3 | 1 | 1.600 × 10−3 | 18.57 | 0.0005 ** |
| AD | 1.600 × 10−3 | 1 | 1.600 × 10−3 | 8.25 | 0.0111 * |
| BD | 1.225 × 10−3 | 1 | 1.225 × 10−3 | 8.25 | 0.0111 * |
| A2 | 0.024 | 1 | 0.024 | 365.72 | <0.0001 ** |
| B2 | 0.55 | 1 | 0.55 | 87.78 | <0.0001 ** |
| C2 | 2.552 × 10−3 | 1 | 2.552 × 10−3 | 389.41 | <0.0001 ** |
| D2 | 0.11 | 1 | 0.11 | 4.91 | 0.0416 * |
| Residual | 3.738 × 10−3 | 16 | 2.336 × 10−4 | ||
| Lack of Fit | 2.858 × 10−3 | 12 | 2.382 × 10−4 | 1.08 | 0.5180 |
| Pure Error | 8.800 × 10−4 | 4 | 2.200 × 10−4 | ||
| Cor Total | 0.72 | 28 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Chen, B.; Li, Z.; Zhu, C.; Jin, E.; Qu, Z. Design and Simulation Analysis of a Reverse Flexible Harvesting Device for Fresh Corn. Agriculture 2022, 12, 1953. https://doi.org/10.3390/agriculture12111953
Zhang H, Chen B, Li Z, Zhu C, Jin E, Qu Z. Design and Simulation Analysis of a Reverse Flexible Harvesting Device for Fresh Corn. Agriculture. 2022; 12(11):1953. https://doi.org/10.3390/agriculture12111953
Chicago/Turabian StyleZhang, Hongmei, Bo Chen, Zhijie Li, Chenhui Zhu, E Jin, and Zhe Qu. 2022. "Design and Simulation Analysis of a Reverse Flexible Harvesting Device for Fresh Corn" Agriculture 12, no. 11: 1953. https://doi.org/10.3390/agriculture12111953