
Numerical Simulation of Seed-Movement Characteristics in New Maize Delivery Device

Abstract
:1. Introduction
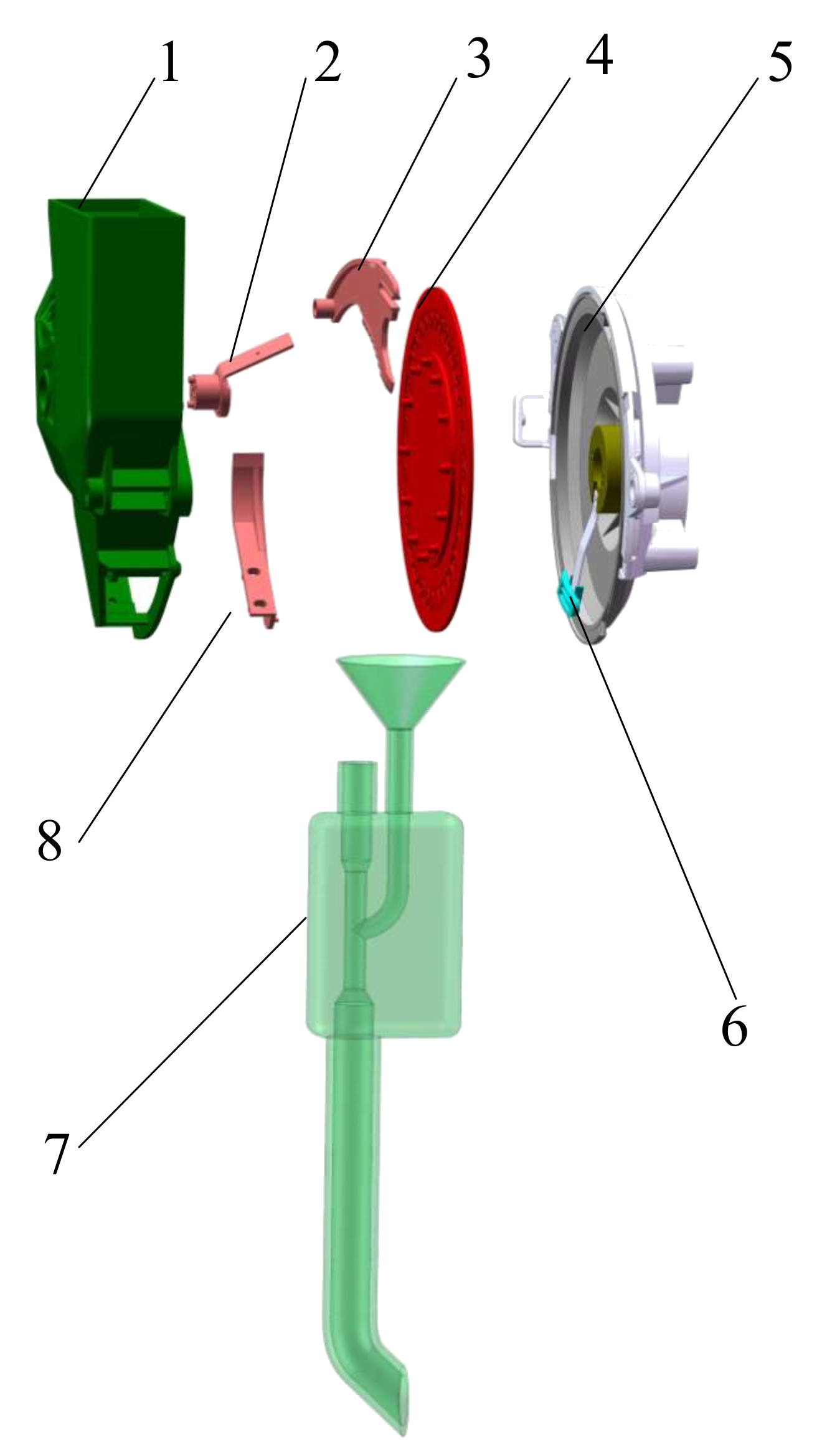
2. The Seed-Guiding System and Working Process
Overall Structure of Seed-Metering Device
3. Materials and Methods for Simulation Experiments
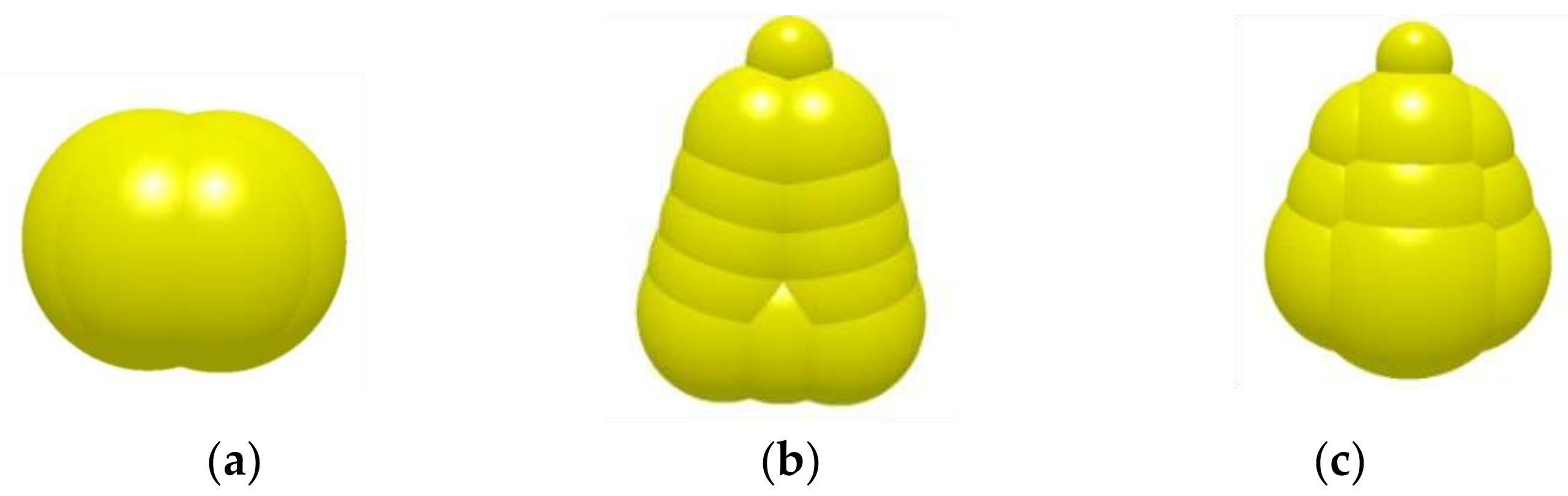
3.1. Seed Modeling
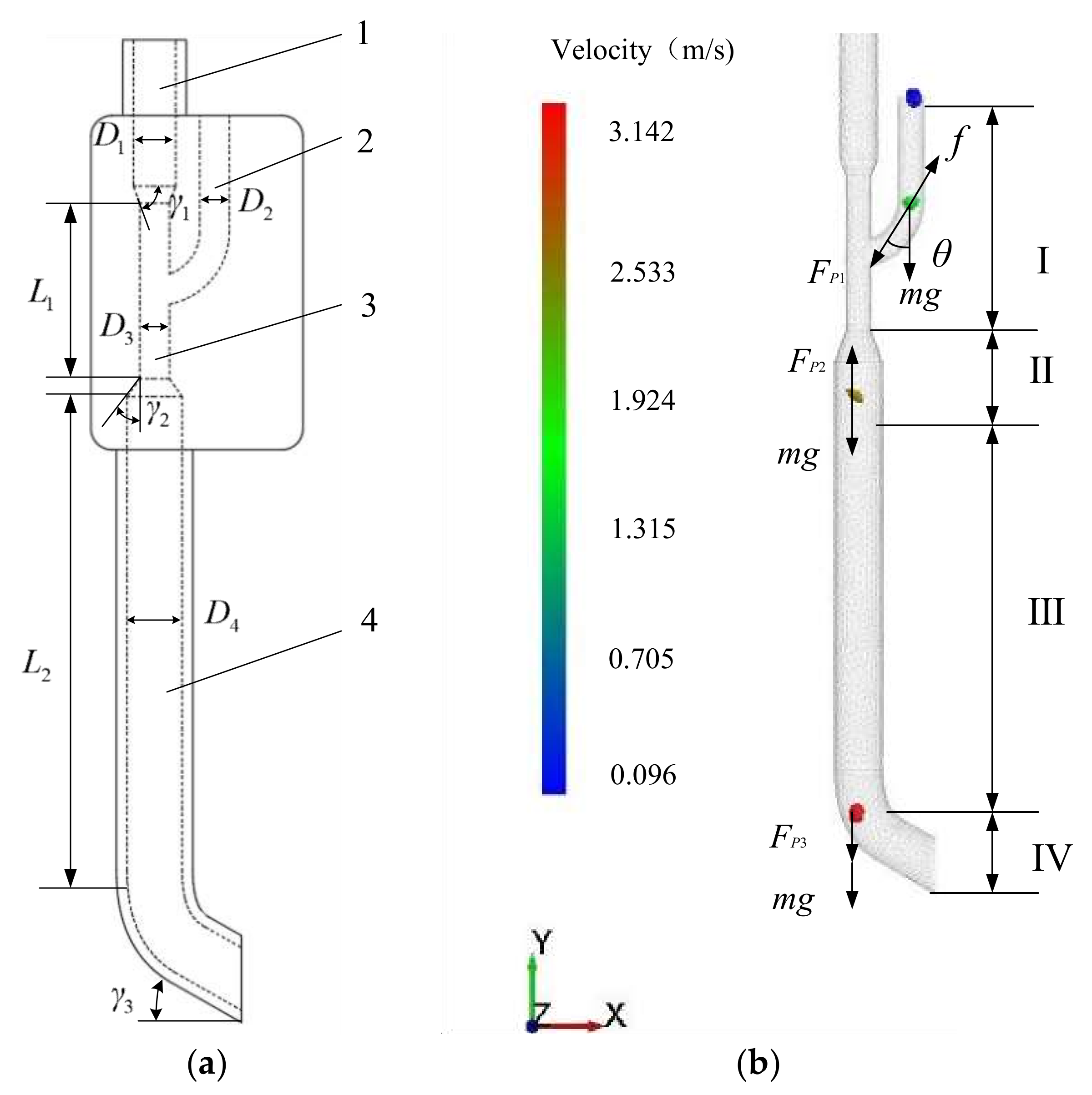
3.2. Numerical Calculation Methods and Boundary Conditions
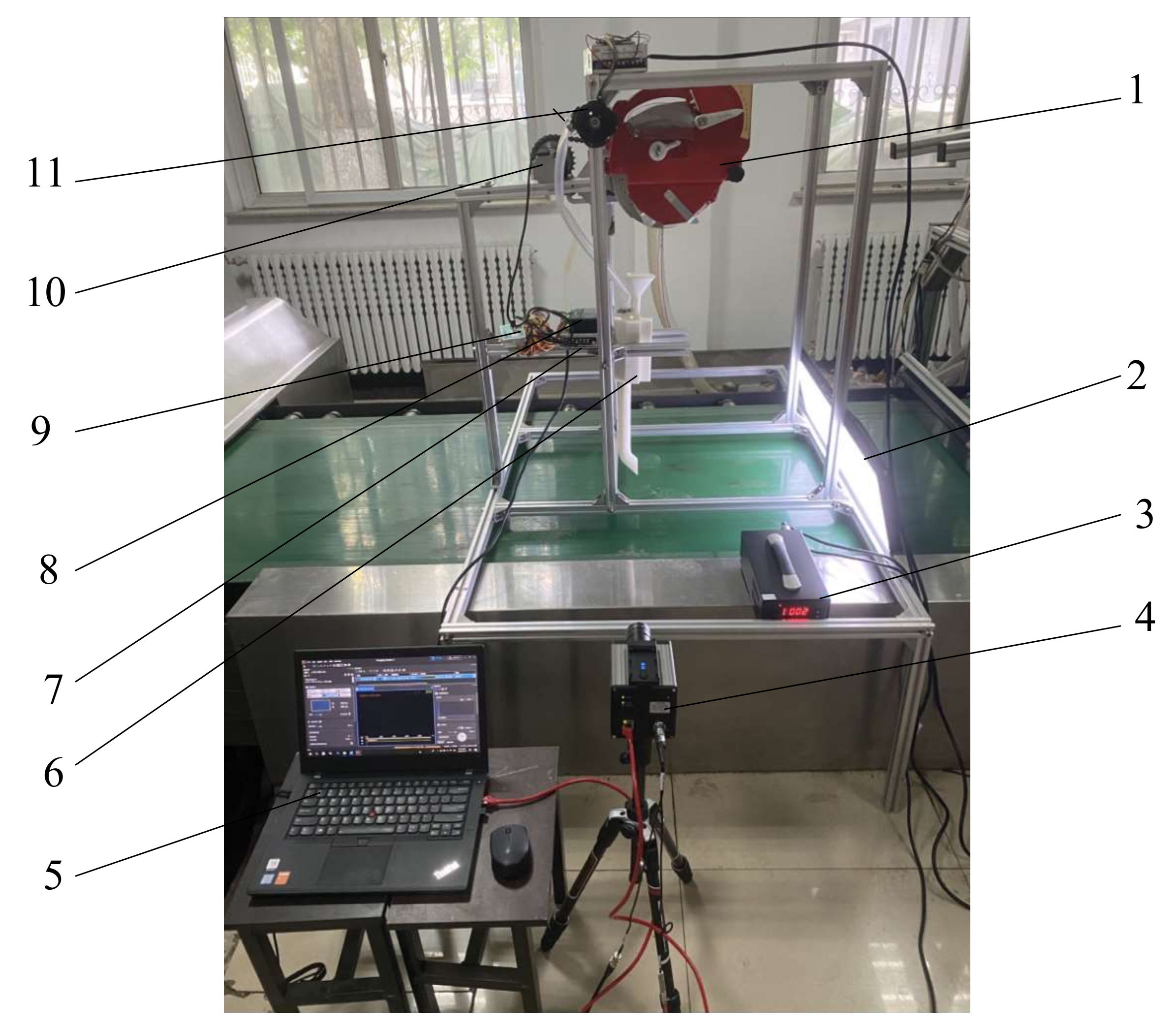
3.3. Simulation Test Design
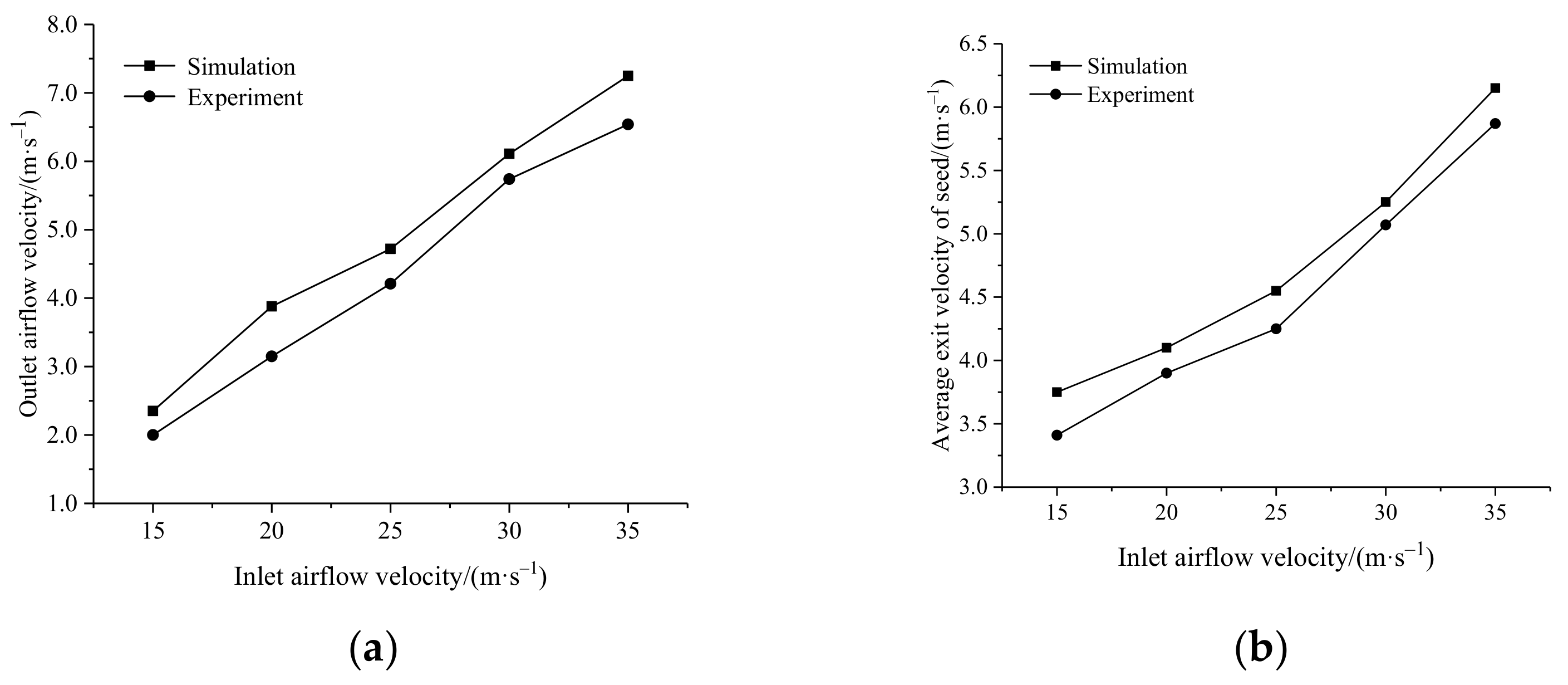
3.4. Model Validation
4. Simulation Results and Discussion
4.1. Optimal Design of Intake Seed-Chamber Location
4.2. Effects of Shrinkage Angle
4.3. Effects of Diffusion Angle
4.4. Effects of Ejection Angle
4.5. Effect of Inlet-Airflow Velocity on Seed Motion
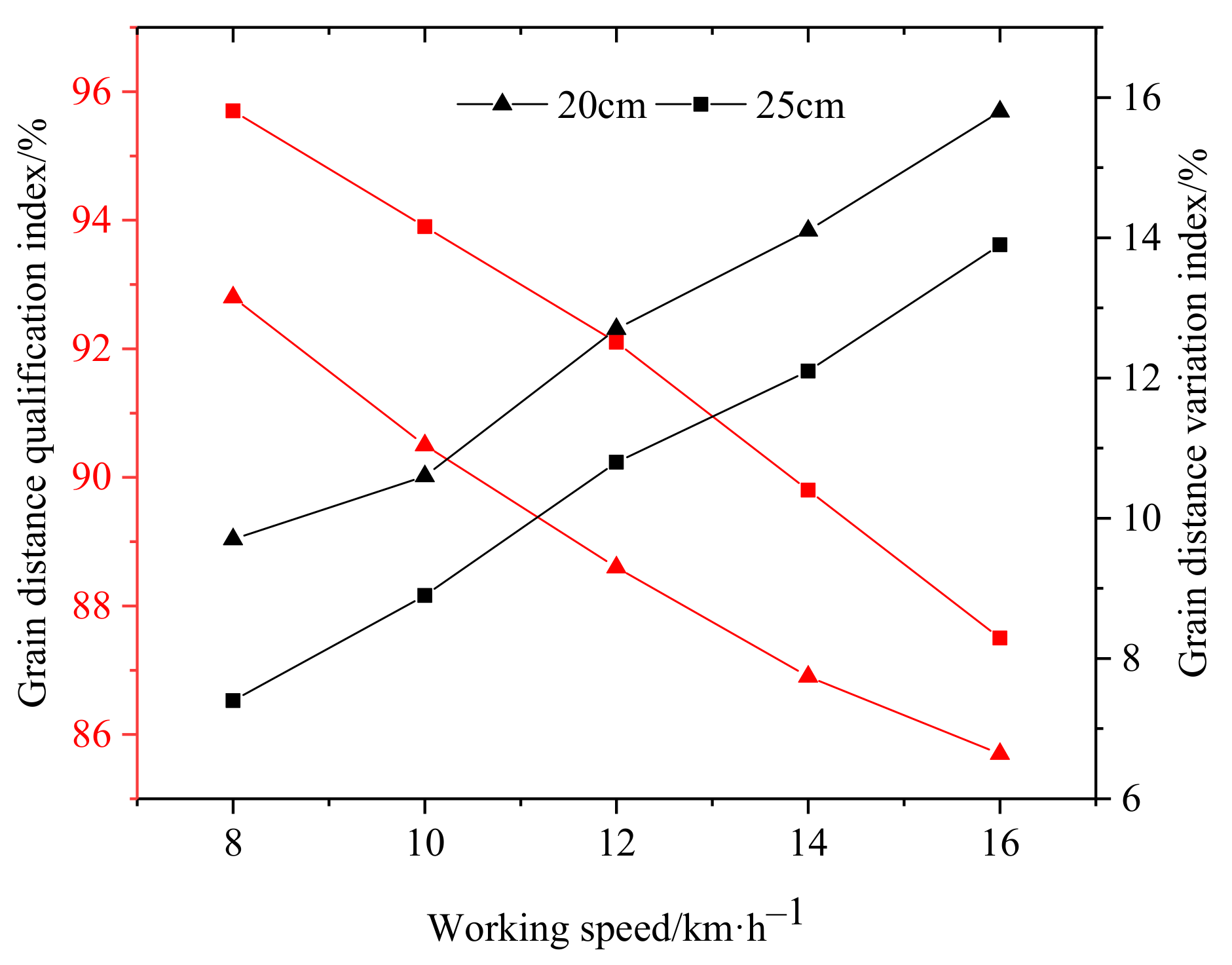
4.6. Working Performance
5. Discussion
6. Conclusions
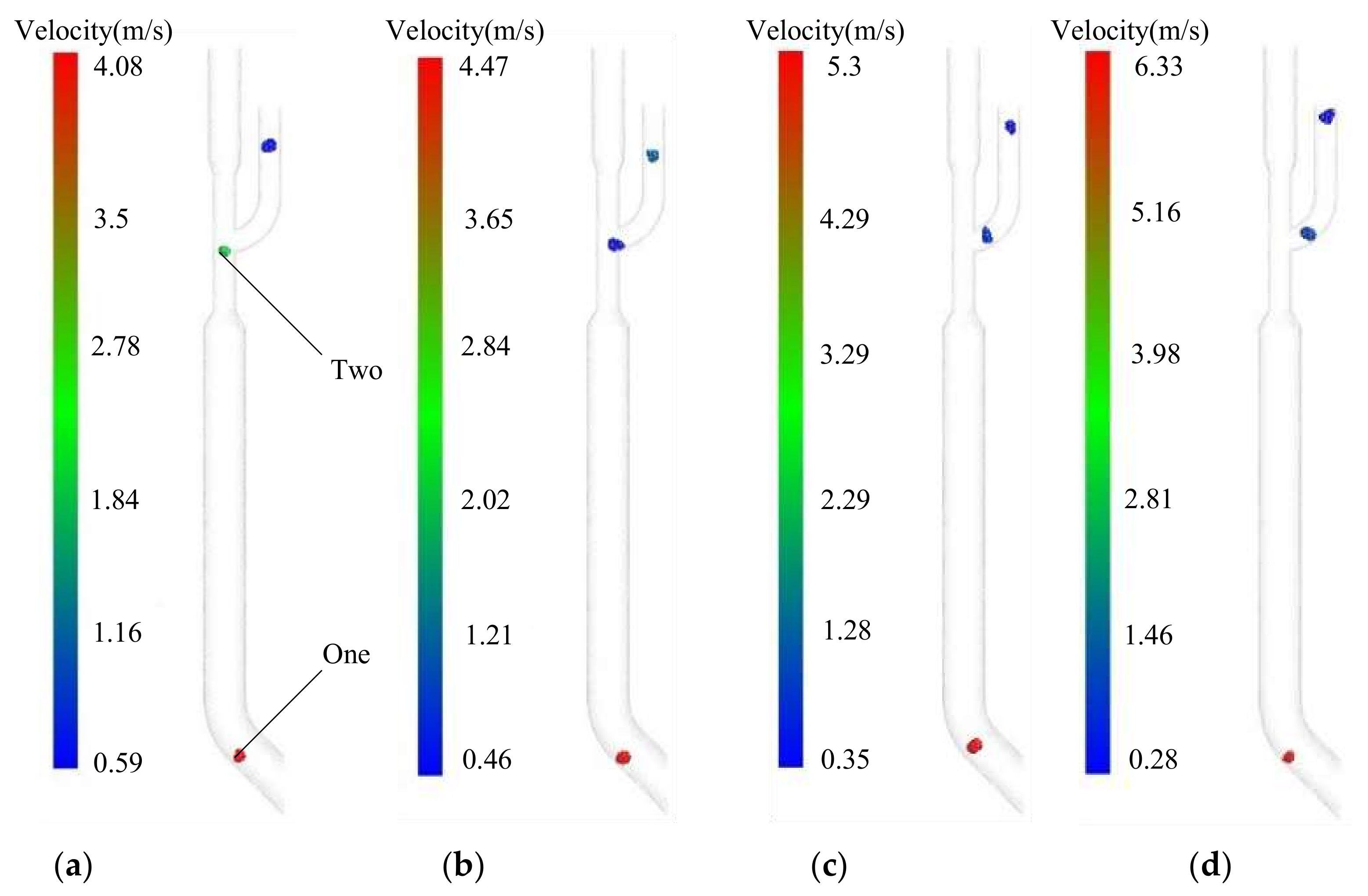
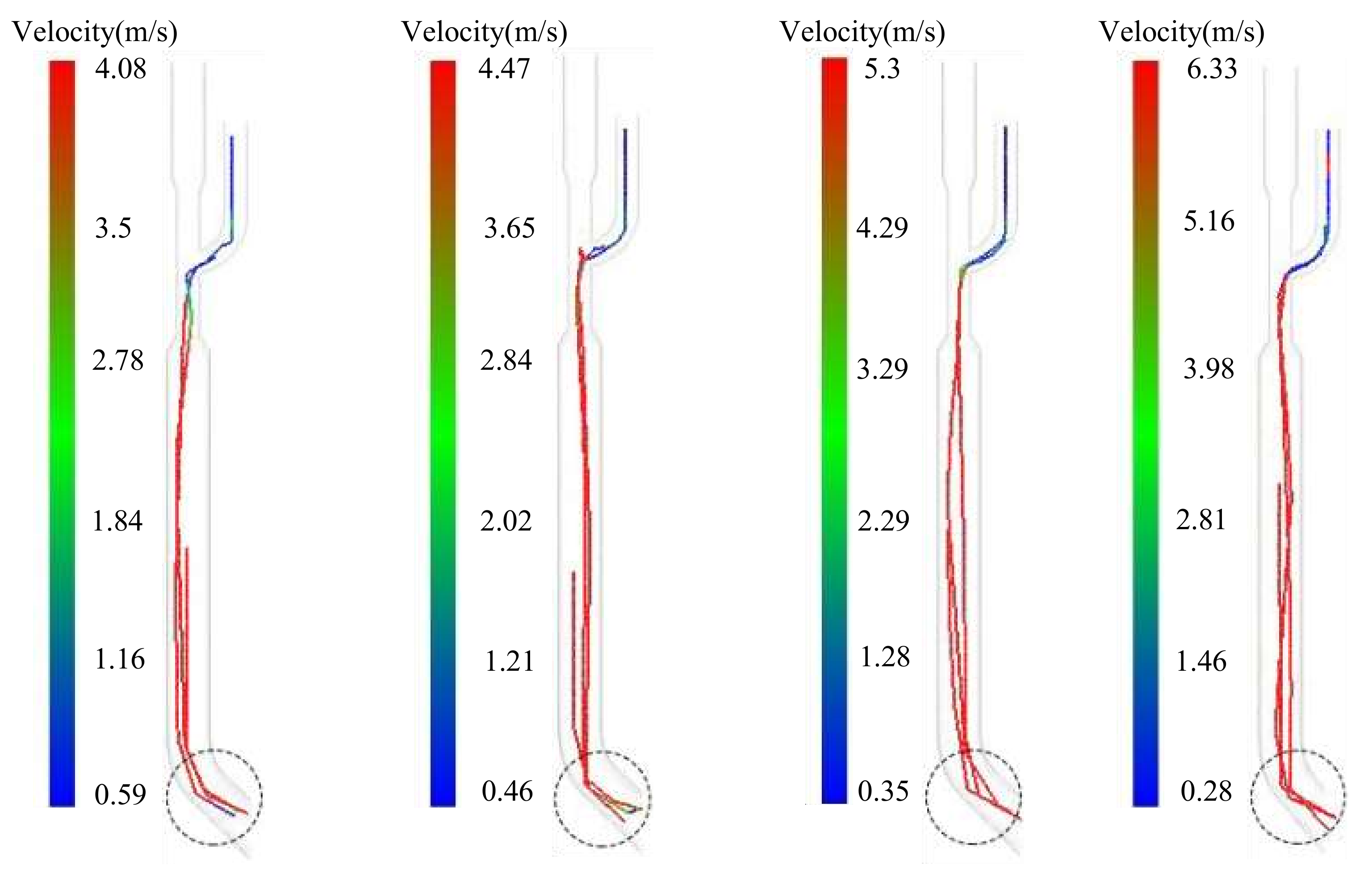
- (a)
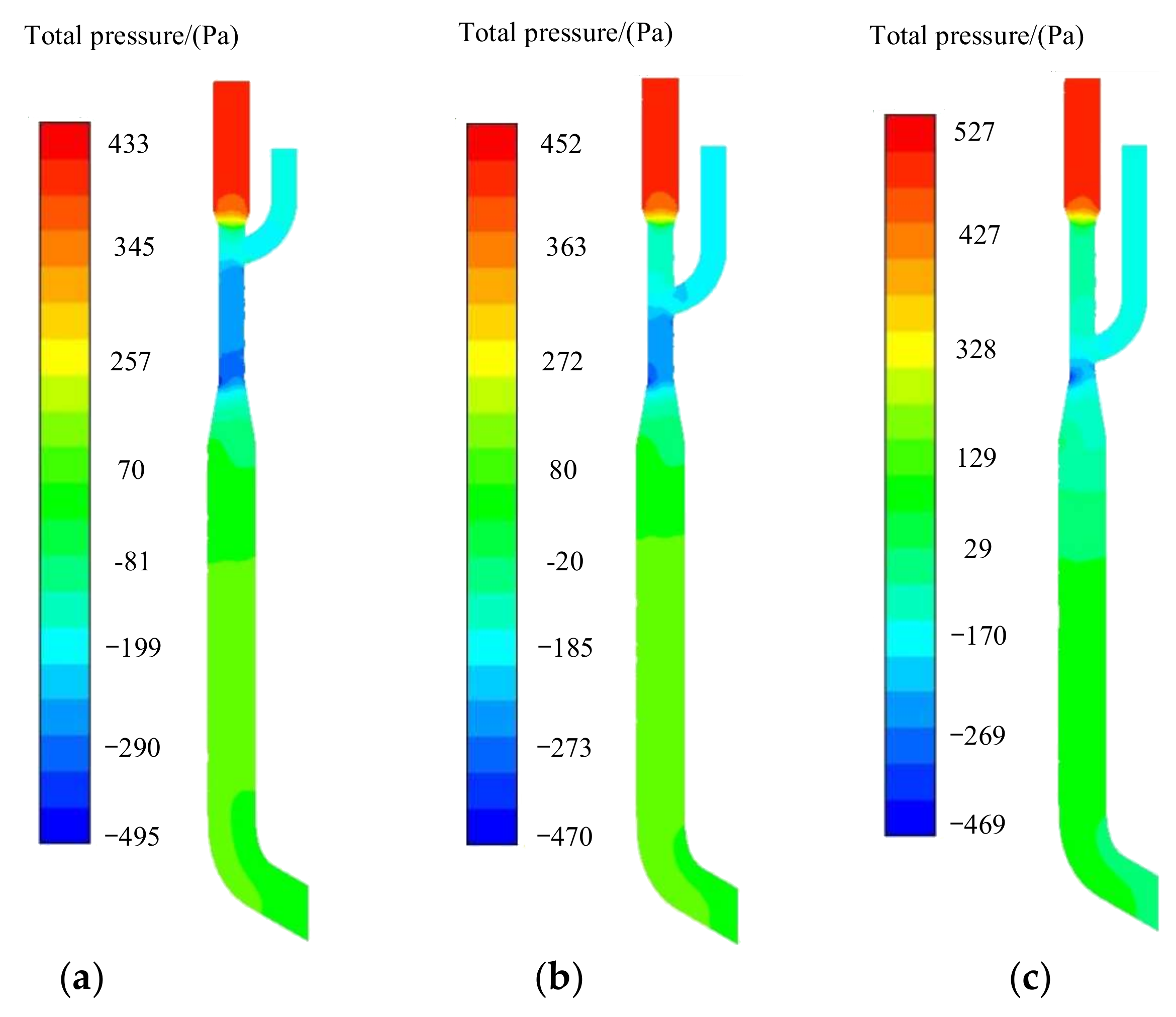
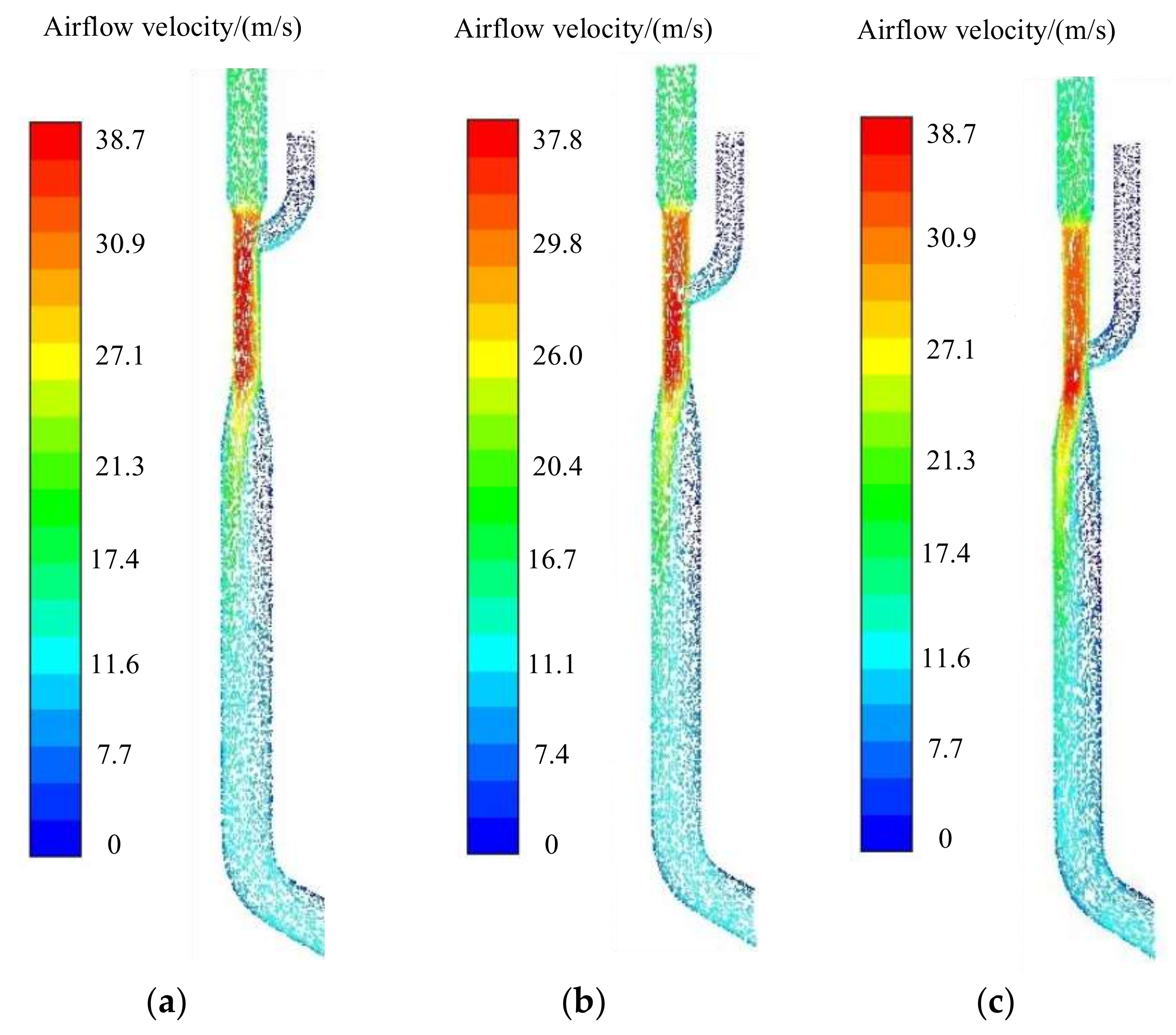
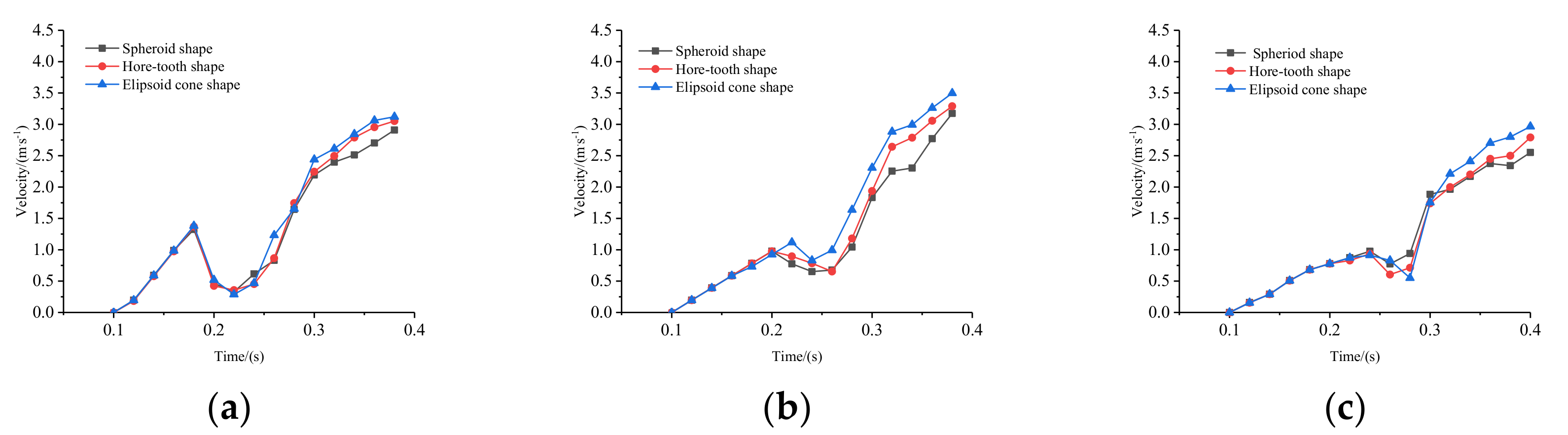
- The location of the intake seed chamber had an effect on the distribution area and velocity of the airflow field in the mixing chamber. When the position of the intake seed chamber moves from top to bottom, the minimum negative pressure distribution area in the mixing chamber decreases. Moreover, the negative pressure increases and the airflow velocity decreases. When the intake seed chamber is located in the middle, the seed-ejection speed is the largest; when the intake seed chamber is in the lower position, the flow time of the seeds of the three shapes is the longest.
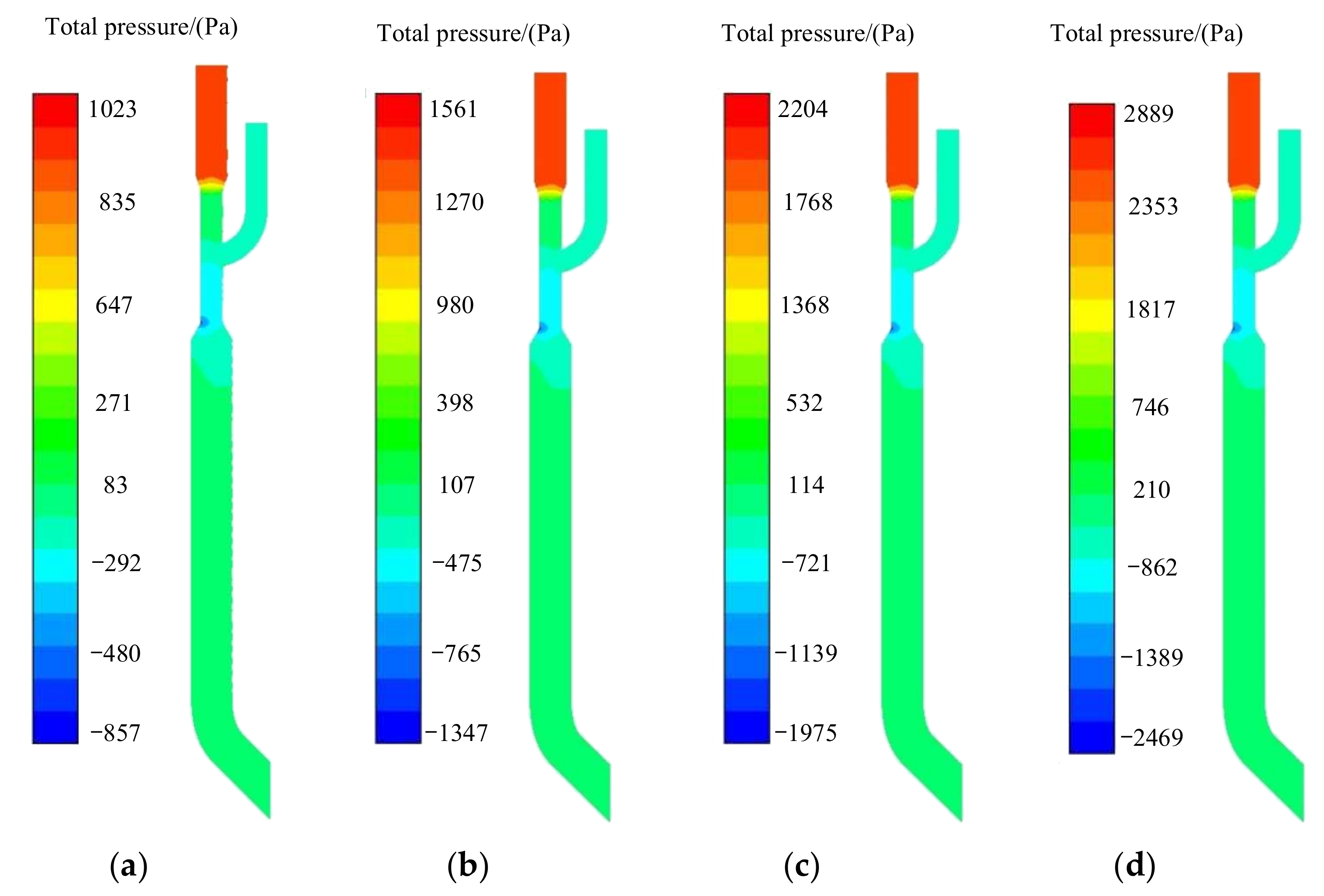
- (b)
- The effects of the contraction angle and diffusion angle on the airflow field and seed movement were analyzed, as were the effects of the shrinkage angle and diffusion angle on the airflow field and seed movement. When the shrinkage angle increases, the negative pressure in the intake seed chamber and the lower part of the mixing chamber increases, the reverse pressure difference between the lower part of the mixing chamber and the upper part of the delivery chamber decreases, and the airflow velocity in the delivery chamber decreases. When the shrinkage angle is 70°, the pressure distribution of the delivery device is better, which helps the seeds to obtain their maximum ejection speed. When the diffusion angle is 30°, the velocity streamline of the gas at the diffusion port is a stable, straight jet flow; furthermore, the airflow velocity in the delivery chamber is the highest.
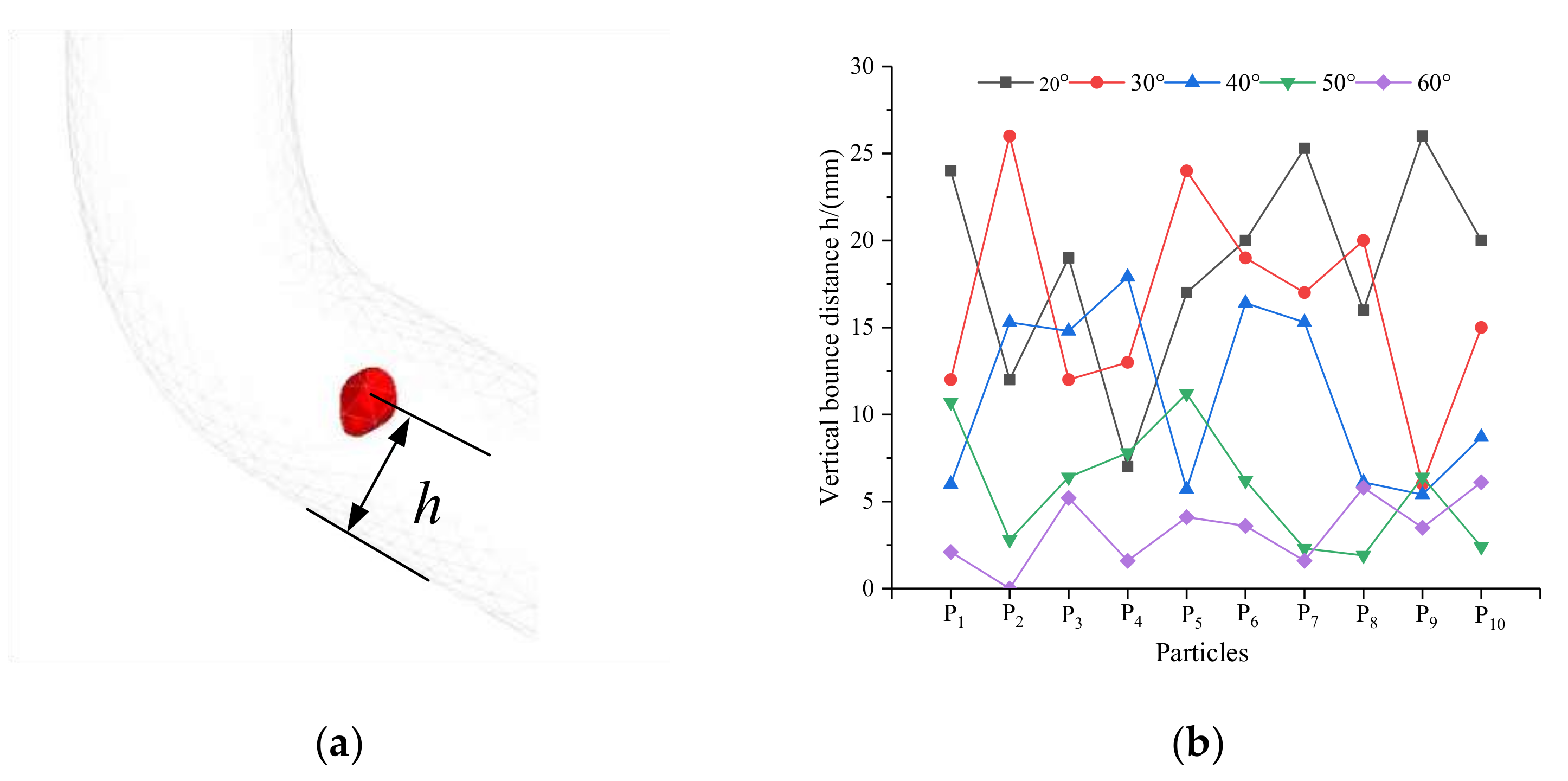
- (c)
- The effects of the ejection angle and inlet-wind speed on the seed-exit velocity were analyzed. The results show that when the ejection angle is 60°, the jumping height of the seeds is the lowest, which helps the seeds to enter the seed groove along the same ejection speed and direction. When the inlet wind speed is increased from 15 m/s to 35 m/s, according to a fixed variable, the ejection speed of the seeds can also be increased, according to a certain proportion. By using the DEM-CFD model, the motion mechanism of the seeds under the action of the air flow can be better understood, and the matching model between the forward speed of the seeder and the inlet velocity of air flow can be obtained. When the operating speed is 10~20 km/h, zero-speed seeding can be realized, and the uniformity of the grain spacing can be improved. In the future, the flexible receiving part between the seed-metering device and the delivery device will be studied further, so that the orderly single seeds from the seed meter can enter the delivery device in an orderly manner. In this way, the operational accuracy of the seeder will be further improved.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- National Bureau of Statistics. China Statistical Yearbook, 1978–2020; China Statistical Publishing House: Beijing, China, 2020; (In Chinese with English Abstract). [Google Scholar]
- Yang, L.; Yan, B.X.; Cui, T.; Yu, Y.M.; He, X.T.; Liu, Q.W.; Liang, Z.J.; Yin, X.W.; Zhang, D.X. Global overview of research progress and development of precision maize planters. Int. J. Agric. Biol. Eng. 2016, 9, 9–26. [Google Scholar]
- Yang, L.; Yan, B.X.; Zhang, D.X.; Zhang, T.L.; Wang, Y.X.; Cui, T. Research Progress on Precision Planting Technology of Maize. Trans. Chin. Soc. Agric. Mach. 2016, 47, 38–48, (In Chinese with English Abstract). [Google Scholar]
- Wang, Y.C.; Gao, Y.P.; Tai, W.S.; Li, B.Q.; Zhang, W.; Han, X. Design and experiment of clamping maize precision seed-metering device. Trans. Chin. Soc. Agric. Mach. 2019, 50, 40–46, (In Chinese with English Abstract). [Google Scholar]
- Gao, X.J.; Cui, T.; Zhou, Z.Y.; Yu, Y.; Xu, Y.; Zhang, D.X.; Song, W. DEM study of particle motion in novel high-speed seed metering device. Powder Technol. 2021, 32, 1438–1449. [Google Scholar] [CrossRef]
- Yi, S.J.; Chen, T.; Li, Y.F.; Tao, C.X.; Mao, X. Design and test of millet hill-drop seed-metering device with combination of positive-negative pressure and hole wheel. Trans. Chin. Soc. Agric. Mach. 2020, 52, 83–94, (In Chinese with English Abstract). [Google Scholar]
- Ding, L.; Yang, L.; Liu, S.R.; Yan, B.X.; He, X.T.; Zhang, D.X. Design of air suction high speed precision maize seed metering device with assistant seed filling plate. Trans. Chin. Soc. Agric. Eng. 2018, 34, 1–11, (In Chinese with English Abstract). [Google Scholar]
- Liu, Q.W.; He, X.T.; Yang, L.; Zhang, D.X.; Cui, T. Effect of travel speed on seed spacing uniformity of corn seed meter. Int. J. Agric. Biol. Eng. 2017, 10, 98–106. [Google Scholar]
- Zhao, S.H.; Chen, J.Z.; Wang, J.Y.; Chen, J.Q.; Yang, C.; Yang, Y.Q. Design and experiment on V-groove dialing round type guiding-seed device. Trans. Chin. Soc. Agric. Mach. 2018, 49, 146–158, (In Chinese with English Abstract). [Google Scholar]
- Liu, L.J.; Yang, H. 3D reverse engineering design on seed tube based on Geomagic Design software. Trans. Chin. Soc. Agric. Eng. 2015, 31, 40–45, (In Chinese with English Abstract). [Google Scholar]
- Product Introduction of Sweden Vaderstad Company [EB/OL]. 2022. Available online: http://www.vaderstad.com/en/Planting/tempo-planter/tempor-12-18/#zone-4777 (accessed on 6 July 2021).
- Product Introduction of American Precision Planting Company [EB/OL]. 2022. Available online: https://www.precisionplanting.com/products/product/speed%20tube (accessed on 6 July 2021).
- Liu, L.; Lu, P. Numerical simulation on resistaqce loss and structure optimization of CFD-FGD venturi tube. Environ. Sci. Technol. 2013, 6, 154–158. [Google Scholar]
- Silva, A.M.; Teixeira, J.C.F.; Teixeira, S.F.C.F. Experiments in large-scale venturi scrubber part Ⅰ: Pressure drop. Chem. Eng. Process. Process Intensif. 2009, 48, 59–67. [Google Scholar] [CrossRef]
- Mergheni, M.A.; Sautet, J.C.; Godard, G.; Ticha, H.B.; Nasrallah, S.B. Experimental investigation of turbulence modulation in particle-laden coaxial jets by phase doppler anemometry. Exp. Therm. Fluid Sci. 2009, 33, 517–526. [Google Scholar] [CrossRef]
- Ji, D.A.; Zhang, M.L.; Xu, T.G.; Wang, K.Y.; Li, P.C.; Ju, F. Experimental and numerical studies of the jet tube based on venturi effect. Vacuum 2014, 111, 25–32. [Google Scholar] [CrossRef]
- Jitschin, W.; Ronzheimer, M.; Khodabakhshi, S. Gas flow measurement by means of orifices and venturi tubes. Vacuum 1999, 53, 181–185. [Google Scholar] [CrossRef]
- Han, D.D.; Zhang, D.X.; Jing, H.R.; Cui, T. DEM-CFD coupling simulation and optimization of inside-filling air-blowing maize precision seed-metering device. Comput. Electron. Agric. 2018, 150, 426–438. [Google Scholar] [CrossRef]
- Lei, X.L.; Liao, Y.T.; Liao, Q.X. Simulation of seed motion in seed feeding device with DEM-CFD coupling approach for rapeseed and wheat. Comput. Electron. Agric. 2016, 131, 29–39. [Google Scholar] [CrossRef]
- Wang, Y.B.; Li, H.W.; Hu, H.N.; He, J.; Wang, Q.J.; Lu, C.Y.; Liu, P.; He, D.; Lin, X. DEM-CFD coupling simulation and optimization of a self-suction wheat shooting device. Powder Technol. 2021, 393, 494–509. [Google Scholar] [CrossRef]
- Wang, Y.B.; Li, H.W.; Hu, H.N.; He, J.; Wang, Q.J.; Lu, C.Y.; Liu, P.; He, D.; Lin, X.; Jiang, S.; et al. A noncontact self-suction wheat shooting device for sustainable agriculture: A preliminary research. Comput. Electron. Agric. 2022, 197, 106927. [Google Scholar] [CrossRef]
- Guzman, L.; Chen, Y.; Landry, H. Coupled CFD-DEM simulation of seed flow in an air seeder distributor tube. Processes 2020, 8, 1597. [Google Scholar] [CrossRef]
- Arzu, Y.; Vedat, D.; Adnan, D. Comparison of computational fluid dynamics-based simulations and visualized seed trajectories in different seed tubes. Turk. J. Agric. For. 2020, 44, 599–611. [Google Scholar]
- Pasha, M.; Hassanpour, A.; Ahmadian, H.; Tan, H.S.; Bayly, A.; Ghadiri, M. A comparative analysis of particle tracking in a mixer by discrete element method and positron emission particle tracking. Powder Technol. 2015, 270, 569–574. [Google Scholar] [CrossRef]
- Brosh, T.; Kalman, H.; Levy, A.; Peyron, I.; Ricard, F. DEM-CFD simulation of particle comminution in jet-mill. Powder Technol. 2014, 257, 104–112. [Google Scholar] [CrossRef]
- Akbarzadeh, V.; Hrymak, A.N. Coupled CFD-DEM of particle-laden flows in a turning flow with a moving wall. Comput. Chem. Eng. 2016, 86, 184–191. [Google Scholar] [CrossRef]
- Kuang, S.B.; Li, K.; Yu, A.B. CFD-DEM simulation of large-scale dilute-phase pneumatic conveying system. Ind. Eng. Chem. Res. 2020, 59, 4150–4160. [Google Scholar] [CrossRef]
- Liu, R.; Liu, Z.J.; Liu, L.J.; Li, Y.H. Design and experiment of corn high speed air suction seed metering device with disturbance assisted seed-filling. Trans. Chin. Soc. Agric. Mach. 2022, 53, 50–59, (In Chinese with English Abstract). [Google Scholar]
- Ding, L.; Yang, L.; Zhang, D.X.; Cui, T. Parametric design and test of seed cleaning mechanism of air-suction maize seed-metering device. Trans. Chin. Soc. Agric. Mach. 2019, 50, 47–56, (In Chinese with English Abstract). [Google Scholar]
- Ding, L.; Yang, L.; Zhang, D.X.; Cui, T.; Gao, X.J. Design and test of unloading mechanism of air-suction seed metering device. Trans. Chin. Soc. Agric. Mach. 2020, 51, 37–46, (In Chinese with English Abstract). [Google Scholar]
- Markauskas, D.; Kacianauskas, R.; Dziugys, A. Investigation of adequacy of multi-sphere approximation of elliptical particles for DEM simulation. Granul. Matter 2010, 12, 107–123. [Google Scholar] [CrossRef]
- Chen, Z.R.; Yu, J.Q.; Xue, D.M.; Wang, Y.; Zhang, Q.; Ren, L.Q. An approach to and validation of maize-seed-assembly modelling based on the discrete element method. Powder Technol. 2018, 328, 167–183. [Google Scholar] [CrossRef]
- Coetzee, C. Calibration of the discrete element method: Strategies for spherical and non-spherical particles. Powder Technol. 2020, 364, 851–878. [Google Scholar] [CrossRef]
- Wang, Y.X.; Liang, Z.J.; Zhang, D.X.; Cui, T.; Shi, S.; Li, K.H.; Yang, L. Calibration method of contact characteristic parameters for corn seeds based on EDEM. Trans. Chin. Soc. Agric. Eng. 2016, 32, 36–42, (In Chinese with English Abstract). [Google Scholar]
- Cui, T.; Liu, J.; Yang, L.; Zhang, R.; Lan, W. Experiment and simulation of rolling friction characteristic of corn seed based on high-speed photography. Trans. Chin. Soc. Agric. Eng. 2013, 29, 34–41, (In Chinese with English Abstract). [Google Scholar]
- Zhou, L.; Yu, J.Q.; Wang, Y.; Yan, D.X.; Yu, Y.J. A study on the modelling method of maize -seed particles based on the discrete element method. Powder Technol. 2020, 374, 353–376. [Google Scholar] [CrossRef]
- Wang, L.; Liao, Y.T.; Wang, B.S.; Hu, Q.L.; Liao, Q.X. Design and test on mixing component of air-assisted centralized metering device for rapeseed and wheat. Trans. Chin. Soc. Agric. Mach. 2022, 53, 68–79,97, (In Chinese with English Abstract). [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Maize | Organic Glass | |
|---|---|---|---|
| Solid phase | Poisson’s ratio | 0.4 | 0.5 |
| Shear modulus/Pa) | 1.37 × 108 | 1.77 × 108 | |
| Density/kg·m−3 | 1197 | 1180 | |
| Restitution coefficient (with seed) | 0.182 | 0.621 | |
| Static friction coefficient (with seed) | 0.431 | 0.459 | |
| Rolling friction coefficient (with seed) | 0.0782 | 0.0931 | |
| Gas phase | Fluid | Air | |
| Gravitational acceleration/m·s−2 | 9.81 | ||
| Density/kg·m−3 | 1.225 | ||
| Dynamic viscosity/Pa· s | 1.7894 × 10−5 |
| Shrinkage Angle (°) | FI (N) | FIy (N) | FII (N) | FIIy (N) | FIII (N) | FIIIy (N) | V (m·s−1) |
|---|---|---|---|---|---|---|---|
| 60 | 0.0052 | 0.0049 | 0.0560 | 0.0536 | 0.0064 | 0.0060 | 3.01 |
| 70 | 0.0045 | 0.0043 | 0.0412 | 0.0409 | 0.0059 | 0.0055 | 3.36 |
| 80 | 0.0035 | 0.0032 | 0.0334 | 0.0332 | 0.0044 | 0.0038 | 2.84 |
| Diffusion Angle (°) | FI (N) | FIy (N) | FII (N) | FIIy (N) | FIII (N) | FIIIy (N) | v(m·s−1) |
|---|---|---|---|---|---|---|---|
| 10 | 0.0045 | 0.0043 | 0.0462 | 0.0453 | 0.0064 | 0.0061 | 3.21 |
| 20 | 0.0038 | 0.0037 | 0.0289 | 0.0280 | 0.0076 | 0.0073 | 3.48 |
| 30 | 0.0035 | 0.0033 | 0.025 | 0.0249 | 0.0083 | 0.0080 | 3.75 |
| 40 | 0.0029 | 0.0028 | 0.018 | 0.0171 | 0.0072 | 0.0069 | 3.40 |
| Inlet-airflow velocity/m·s−1 | 15 | 20 | 25 | 30 | 35 |
| Average exit velocity of seeds/m·s−1 | 3.75 | 4.1 | 4.55 | 5.25 | 6.15 |
| Working Speed/km·h−1 | Qualification Index/% | Variation Index/% |
|---|---|---|
| 9.21 | 89.7 | 11.7 |
| 11.34 | 87.2 | 12.6 |
| 13.07 | 84.5 | 14.7 |
| 15.48 | 81.1 | 17.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, R.; Liu, L.; Li, Y.; Liu, Z.; Zhao, J.; Liu, Y.; Zhang, X. Numerical Simulation of Seed-Movement Characteristics in New Maize Delivery Device. Agriculture 2022, 12, 1944. https://doi.org/10.3390/agriculture12111944
Liu R, Liu L, Li Y, Liu Z, Zhao J, Liu Y, Zhang X. Numerical Simulation of Seed-Movement Characteristics in New Maize Delivery Device. Agriculture. 2022; 12(11):1944. https://doi.org/10.3390/agriculture12111944
Chicago/Turabian StyleLiu, Rui, Lijing Liu, Yanjun Li, Zhongjun Liu, Jinhui Zhao, Yunqiang Liu, and Xuedong Zhang. 2022. "Numerical Simulation of Seed-Movement Characteristics in New Maize Delivery Device" Agriculture 12, no. 11: 1944. https://doi.org/10.3390/agriculture12111944