
Design and Simulation of a Garlic Seed Metering Mechanism

 and
and
Abstract
:1. Introduction
2. Analysis of Morphological Characteristics of Garlic Seeds
2.1. Measurement and Analysis of Garlic Seed Shape
2.2. Garlic Agronomic Planting Requirements
- (1)
- For planting the seeds, the soil should have low hardness and good water retention and drainage capability, as well as should be loose and fertile after rotary tillage.
- (2)
- The best planting season is the transition period from summer to autumn, which is around September. Planting too early will result in a weak wintering ability of the plants, in turn affecting the quality of garlic, whereas planting too late will lead to weak cold resistance and higher mortality of the plants.
- (3)
- The planting technique currently used is mainly manual sowing, and it involves the processes of land preparation, digging ditches, seed planting, and soil covering.
- (4)
- The best time to harvest garlic is 20 days after garlic moss harvest.
- (5)
- Planting the seeds at a reasonably close distance improves yield. In general, the density is 20 cm from row to row, and the seed spacing is 10–15 cm. The seeds should be planted shallowly in trenches having a depth of 3–5 cm and that are covered with soil up to 1–2 cm after sowing. The roots are mostly distributed in the soil layer at 5–25 cm depth, and approximately 20,000 plants per 667 m2 is the optimum density.
- (6)
3. Design of the Seed Metering Device and Determination of Its Parameters
3.1. Design of the Hole Wheel
3.2. Design of Seed Cleaning Device
3.3. Design of a Seed Guard Plate
4. Discrete Element Simulation Analysis of the Seed Metering Device
4.1. EDEM Simulation Parameter Setting
4.1.1. Determination of Friction Coefficient
4.1.2. Determination of Collision Recovery Coefficient
4.2. Establishment of a Discrete Element Model of the Seed Metering Device
4.2.1. Global Variable Settings
4.2.2. Garlic Seed Model
4.2.3. Seed Metering Model
4.2.4. Pellet Plant Settings
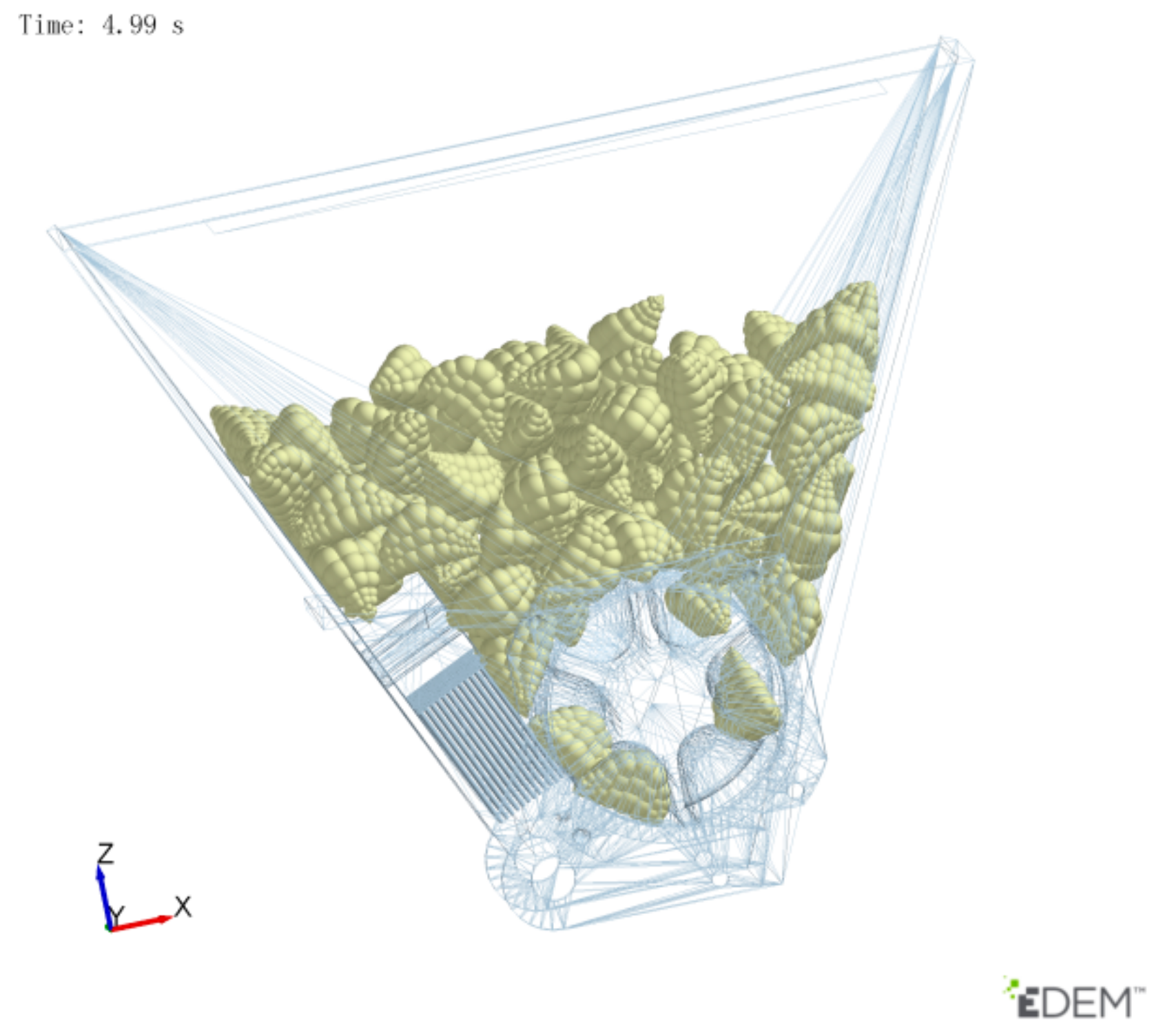
4.2.5. Simulation Calculation
4.3. Virtual Experiment of Seed Metering Mechanism
4.4. Simulation Results and Analysis
5. Field Experiment
6. Conclusions
- (1)
- According to the specifications of the garlic clove, a garlic seed metering device was designed such that the hole of the hole wheel can accommodate only a single garlic clove at a time in order to realize single-seed metering.
- (2)
- The existing seed metering structure cannot adjust the seed metering process according to different garlic species, which affects the planting performance. To overcome this limitation, a single-seed metering device was designed with simple adjustment capability according to the shape and size of garlic cloves.
- (3)
- For the selection of the adjustment size of existing seed metering devices, the traditional test method is used, whose design optimization cost is high, test cycle is long, and test range and times are limited. Therefore, in this study, the EDEM discrete element simulation software was used to simulate the movement process of garlic cloves in the designed seed metering and sowing device. Moreover, a virtual test of seed metering performance was conducted to determine the best adjustment size of the seed metering device.
- (4)
- According to the three-dimensional model design and theoretical analysis, the core components of the planter were designed and processed, the assembly of the garlic planter was completed, and the garlic sowing experiment was successfully conducted.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gao, C.; Xue, S.; Li, S. Experimental study on garlic bulb direction recognition. Agric. Mech. Res. 2010, 10, 136–138. [Google Scholar]
- Cui, R.; Huang, J.; Zhang, Z.; Wang, X.; Jian, S. Title of the chapter. Research status of garlic mechanized seeding technology. Agric. Equip. Veh. Eng. 2018, 56, 54–56. [Google Scholar]
- Wang, F. Design and analysis of main components of garlic planter. Agric. Mech. Res. 2012, 8, 90–93. [Google Scholar]
- Ding, L.; Yang, L.; Liu, S.; Yan, B.; He, X.; Zhang, D. Design of air-suction high-speed precision maize seed metering device with assistant seed filling plate. Trans. CSAE 2018, 34, 1–11. [Google Scholar]
- Han, Q.; Wang, X.; Hao, J.; Xie, L.; Yv, J. Design and Research of Inserting Hole Type Automatic Directional Garlic Planter. Agric. Mech. Res. 2016, 38, 172–175. [Google Scholar]
- Shi, S.; Zhang, D.; Yang, L.; Cui, T.; Li, K.; Yin, X. Simulation and verification of the filling performance of the pneumatic combined hole-type seed metering device based on EDEM software. Trans. Chin. Soc. Agric. Eng. 2015, 31, 62–69. [Google Scholar]
- Cui, R.; Jian, S.; Xv, W.; Ma, J.; Wang, X. Design and experiment of garlic upright planter. Agric. Mech. Res. 2016, 38, 201–205. [Google Scholar]
- Li, X.; Geng, A.; Hou, J.; Zhang, M.; Zhang, J.; Li, W. Research status and prospect of garlic planter. Farm Mac. 2017, 2, 105–107. [Google Scholar]
- Yang, B.; Zong, Y.; Zhao, B. Calculation of International Competitiveness of China’s Garlic Industry and Analysis of Influencing Factors. Agric. Outlook 2019, 15, 113–117+126. [Google Scholar]
- Geng, A.; Zhang, Z.; Song, Z.; Yang, J.; Li, R.; Hou, J.; Liu, S. Kinematic analysis and parameter optimized experiment of garlic box putting process. Trans. Chin. Soc. Agric. Eng. 2016, 32, 29–35. [Google Scholar]
- Liu, J.; Geng, A.; Li, X.; Hou, J.; Han, X. Research status of garlic planting machine single seed-filling and resow. Agric. Mech. Res. 2019, 41, 262–268. [Google Scholar]
- Wang, J.; Tang, H.; Wang, Q.; Zhou, W.; Yang, W. Numerical simulation and experiment on seeding performance of pickup finger precision seed-metering device based on EDEM. Trans. Chin. Soc. Agric. Eng. 2015, 31, 43–50. [Google Scholar]
- Cui, R.; Jian, S.; Yang, J.; Wang, X.; Ma, J. Optimal design and experiment of spoon-chain garlic seed extractor. Agric. Mech. Res. 2017, 39, 99–107. [Google Scholar]
- Hou, J.; Liu, Q.; Li, T.; Li, Y.; Lou, W.; Geng, A. Design and experiment of garlic single seed picking device with double filling chamber. Trans. Chin. Soc. Agric. Eng. 2021, 37, 21–32. [Google Scholar]
- Geng, A.; Li, X.; Hou, J.; Zhang, Z.; Zhang, J.; Chong, J. Design and Test of Automatic Directional Garlic Planter. Trans. Chin. Soc. Agric. Eng. 2018, 34, 17–25. [Google Scholar]
- Li, X.; Geng, A.; Hou, J.; Zhang, J.; Zhang, Z. Design and experiment of full-automatic lifting and releasing device of garlic seed box. Trans. Chin. Soc. Agric. Eng. 2017, 33, 32–37. [Google Scholar]
- Li, Y.; Zhang, Z.; Li, T.; Wu, Y.; Niu, Z.; Hou, J. Design and Experiment of Wheel-spoon Type Garlic Precision Seed-picking Device. Trans. Chin. Soc. Agric. Mach. 2020, 51, 61–68. [Google Scholar]
- Wang, H. Design and Experiment of Claw Circulating Single Seed-picking Device of 2BSZ-12 Garlic Planting Machine. Master’s Thesis, Shandong Agricultural University, Taian, China, 2019. [Google Scholar]
- Hou, J.; Wang, H.; Niu, Z.; Xi, R.; Li, T. Discrete element simulation and experiment of garlic seed picking device picking and clearing performance. Trans. Chin. Soc. Agric. Eng. 2019, 35, 48–57. [Google Scholar]
- Liang, K. Single Garlic Seed Method and Single Seed Seed Device. Chinese Patent No. CN201410585171.5, 18 February 2015. [Google Scholar]
- Chen, X.; Zhao, Y. Development of double-film mulch precision planter for cotton seeding. Trans. CSAE. 2010, 26, 106–112. [Google Scholar]
- Kang, J.; Peng, Q.; Zhang, C.; Zhang, N.; Fang, H. Design and testing of a punching-on-film precision hole seeder for peanuts. Transactions of the ASABE. Trans. ASABE 2020, 63, 1685–1696. [Google Scholar] [CrossRef]
- Furuhata, M.; Chosa, T.; Shioya, Y.; Tsukamoto, T.; Seki, M.; Hosokawa, H. Developing Direct Seeding Cultivation Using an Air-Assisted Strip Seeder. Jpn. Agric. Res. Q. 2015, 49, 227–233. [Google Scholar] [CrossRef] [Green Version]
- Calderon-Reyes, E.; Serwatowski, R.; Cabrera-Sixto, J.M.; Gracia-Lopez, C. Mechanized seeding of garlic: Methods and equipment. Agrociencia 2003, 37, 483–493. [Google Scholar]
- Wang, X.; Cui, R.; Xu, W.; Jian, S.; Ma, J. A Garlic Seed Bud Direction Adjusting Device for Garlic Seeder. Chinese Invention Patent No. CN201420650675.6, 11 March 2015. [Google Scholar]
- Hou, J.; Huang, S.; Niu, Z.; Wu, Y.; Li, T. Analysis and experiment on the turning mechanism of double duck mouth garlic head device. J. Agric. Mach. 2018, 49, 87–96. [Google Scholar]
- Zhang, L. Research on a garlic planter based on ADAMS kinematics simulation and experiment. J. Mong. Agric. Univ. 2019, 40, 73–78. [Google Scholar]
- Qin, T.; Wang, C.; Lv, B.; Kuang, J.; Zhang, Q.; Zhang, Q.; Hu, C. Performance analysis of correction mechanism of multilayer correction garlic planter. Agric. Mech. Res. 2019, 41, 81–85. [Google Scholar]
- Tian, S.; Liu, R.; Wang, P. Current situation and development trend of garlic mechanization. Shandong Agric. Mech. 2019, 6, 25–27. [Google Scholar]
- Cui, Z.; Song, J.; Xu, T.; Li, N.; Cai, S. Development of a garlic planter. Agric. Mech. Res. 2017, 39, 131–135. [Google Scholar]
- Li, T.; Huang, S.; Niu, Z.; Hou, J.; Wu, Y.; Li, Y. Optimization and test of planting verticality of planetary wheel garlic transplanter. Trans. Chin. Soc. Agric. Eng. 2020, 36, 37–45. [Google Scholar]
- Wang, H. Development and Test of Claw Type Single Seed Collecting Device for Garlic Planter 2BSZ-12; Shandong Agricultural University: Tai’an, China, 2019. [Google Scholar]
- Wen, E.; Wu, Y.; Li, T.; Hou, J. Design of traction garlic planter. Agric. Mech. Res. 2020, 42, 96–100. [Google Scholar]
- Yang, L.; Li, B.; Liu, Q.; Shang, W.; Li, X. Simultaneous determination of three important functional components in garlic and its products by HPLC. Analy. Lab. 2019, 38, 284–289. [Google Scholar]
- Choi, I.; Kang, N.; Kim, Y.; Jun, H.; Choi, Y.; Kang, T.; Hyun, C.; Lee, S.; Kim, J.; Yu, S. The study on the design factors of the groove-roller seed metering device for seeder of foxtail millet & sorghum. J. Biol. Eng. 2018, 43, 303–310. [Google Scholar]
- Zhang, H. Design and Test of Precision Seeder for Wheat Plot; Northwest A & F University: Xianyang, China, 2019. [Google Scholar]
- Chen, Y. Research on High Speed Precision Seed Metering Device with Air Suction Mechanism; Jilin University: Changchun, China, 2018. [Google Scholar]
- Stoimenov, N.; Ruzic, J. Analysis of the Particle Motion during Mechanical Alloying Using Edem Software. IFAC PapersOnLine 2019, 52, 462–466. [Google Scholar] [CrossRef]
- Li, M. Design and Experimental Study on Pneumatic Cup Spoon Potato Metering Device; Huazhong Agricultural University: Wuhan, China, 2017. [Google Scholar]
- Mahajan, V.; Benke, A.; Gupta, A.J.; Singh, M. Garlic (Allium Sativum L.) Research in India. Progress. Hortic. 2017, 49, 101–112. [Google Scholar] [CrossRef]
- Han, D.; Zhang, D.; Jing, H.; Yang, L.; Cui, T.; Ding, Y.; Wang, Z.; Wang, Y.; Zhang, T. DEM-CFD coupling simulation and optimization of an inside-filling air-blowing maize precision seed-metering device. Comput. Elect. Agric. 2018, 150, 426–438. [Google Scholar] [CrossRef]
- Lai, Q.; Yu, Q.; Dong, J. Dynamic Analysis of Rotary Tiller Gearbox Based on Edem, Adams and Ansys. J. Intell. Fuz. Syst. 2018, 36, 1153–1160. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Garlic Variety | Measurement Type | Number | Average Value | Standard Deviation | Minimum Value | Maximum Value |
|---|---|---|---|---|---|---|
| Length L (mm) | 100 | 34.46 | 2.23 | 29.47 | 36.30 | |
| Shaanxi Caijiapo purple Garlic | Width B (mm) | 100 | 21.76 | 1.94 | 16.02 | 24.90 |
| Height H (mm) | 100 | 18.43 | 2.69 | 16.11 | 23.14 | |
| Length L (mm) | 100 | 27.23 | 1.76 | 25.22 | 33.14 | |
| Qixian garlic | Width B (mm) | 100 | 20.84 | 3.11 | 19.14 | 23.08 |
| Height H (mm) | 100 | 17.2 | 2.95 | 15.01 | 20.64 | |
| Length L (mm) | 100 | 27.16 | 2.47 | 24.76 | 31.90 | |
| Jinxiang garlic | Width B (mm) | 100 | 21.36 | 2.60 | 20.46 | 22.14 |
| Height H (mm) | 100 | 18.63 | 2.67 | 17.04 | 20.76 | |
| Length L (mm) | 100 | 29.64 | 1.53 | 27.32 | 32.40 | |
| Shandong Cang garlic | Width B (mm) | 100 | 22.39 | 2.10 | 20.08 | 24.12 |
| Height H (mm) | 100 | 18.63 | 2.67 | 17.02 | 20.76 |
| Collision Material | Falling Height/mm | Collision Coefficient |
|---|---|---|
| Garlic | 100 | 0.34 |
| 200 | 0.32 | |
| Steel plate | 100 | 0.38 |
| 200 | 0.34 | |
| Polyoxymethylene plate | 100 | 0.36 |
| 200 | 0.33 |
| Parameters | Value |
|---|---|
| Quality (g) | 5.3 |
| Collision recovery coefficient (e) | 0.35 |
| Static friction coefficient between garlic seeds (μ) | 0.43 |
| Static friction coefficient between garlic seed and seed metering device (μ) | 0.46 |
| Parameters | Value | Unit |
|---|---|---|
| Mass | 9.22310 × 10−4 | kg |
| Volume | 4.64310 × 10−6 | m3 |
| Moment of Inertia X | 5.45310 × 10−8 | kg m2 |
| Moment of Inertia Y | 5.05310 × 10−8 | kg m2 |
| Moment of Inertia Z | 3.35310 × 10−8 | kg m2 |
| Shaanxi Caijiapo Purple Garlic | Length (mm) | Width (mm) | Height (mm) |
| 34.46 | 21.76 | 18.43 |
| Serial Number | Inspection Items | Unit | Result |
|---|---|---|---|
| 1 | Multiple seed rate | % | 5.5 |
| 2 | Missing seed rate | % | 8 |
| 3 | Single-seed rate | % | 86.5 |
| 4 | Plant spacing | mm | 13.6 |
| 5 | Upright rate | % | 79.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, H.; Cao, Y.; Song, W.; Zhang, J.; Wang, C.; Wang, C.; Yang, F.; Zhu, L. Design and Simulation of a Garlic Seed Metering Mechanism. Agriculture 2021, 11, 1239. https://doi.org/10.3390/agriculture11121239
Guo H, Cao Y, Song W, Zhang J, Wang C, Wang C, Yang F, Zhu L. Design and Simulation of a Garlic Seed Metering Mechanism. Agriculture. 2021; 11(12):1239. https://doi.org/10.3390/agriculture11121239
Chicago/Turabian StyleGuo, Huiping, Yazhou Cao, Wenyuan Song, Jiao Zhang, Changlin Wang, Chensi Wang, Fuzeng Yang, and Lin Zhu. 2021. "Design and Simulation of a Garlic Seed Metering Mechanism" Agriculture 11, no. 12: 1239. https://doi.org/10.3390/agriculture11121239