
Design and Experiment of a Broken Corn Kernel Detection Device Based on the Yolov4-Tiny Algorithm

Abstract
:1. Introduction
2. Materials and Methods
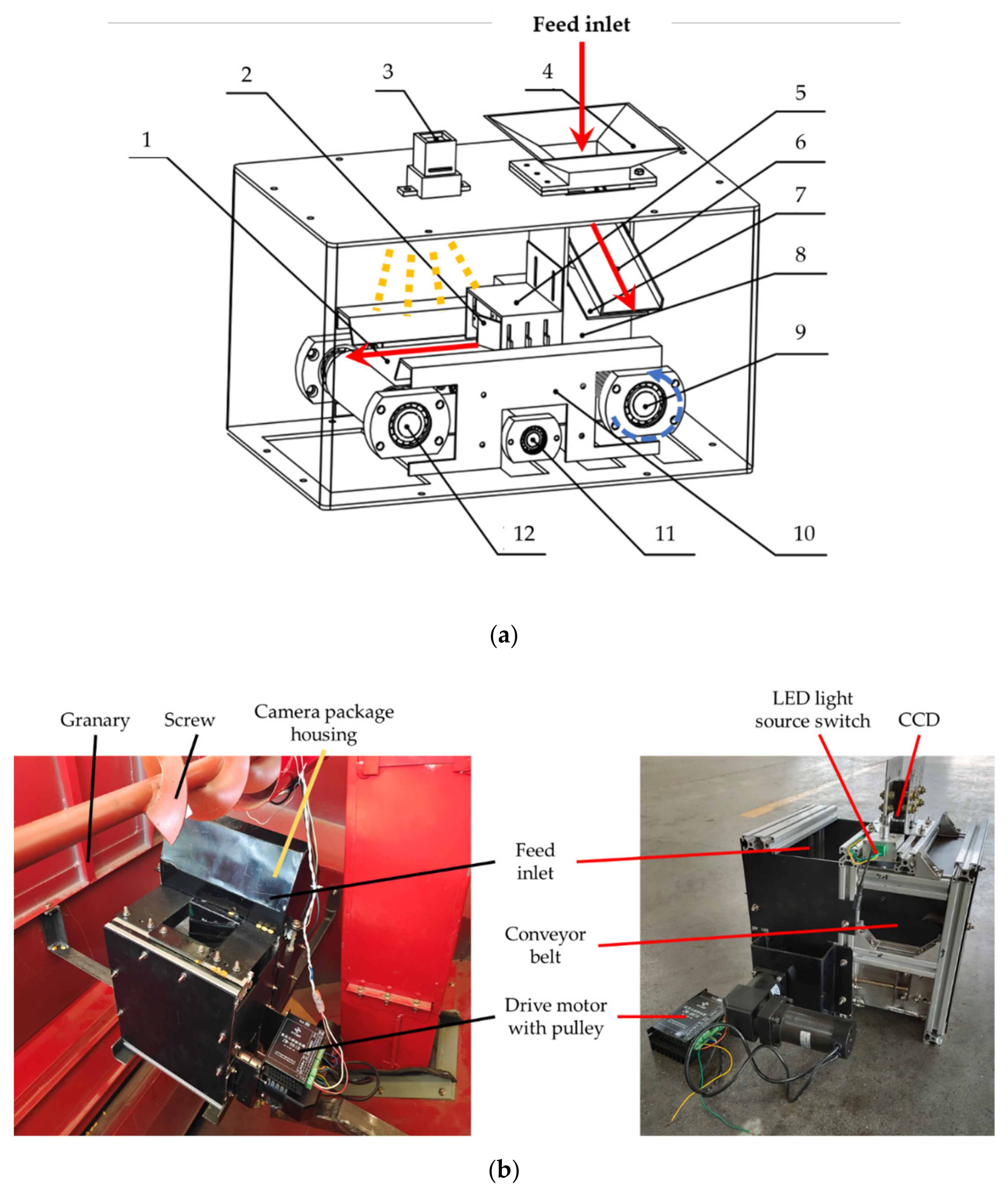
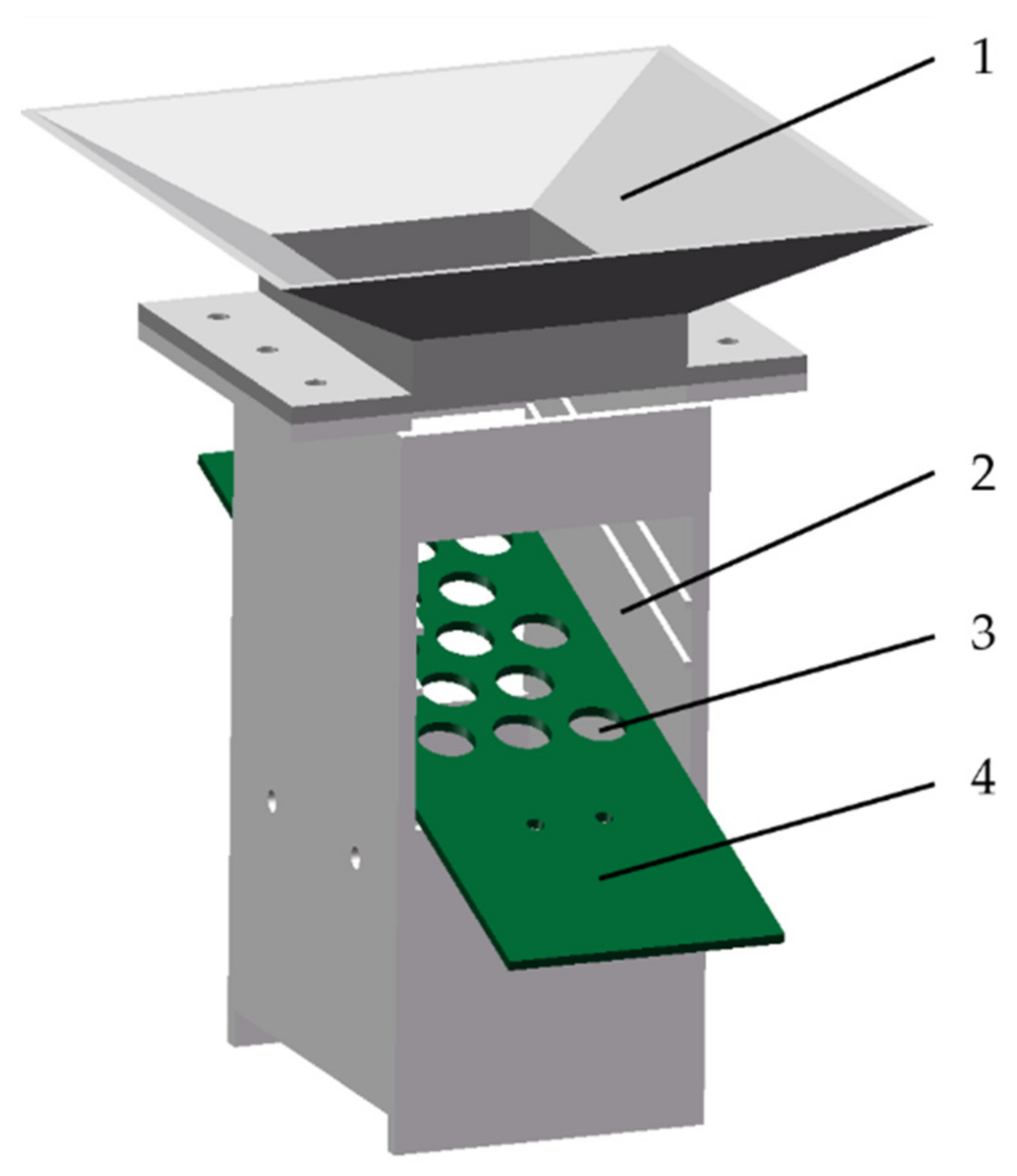
2.1. Design of Broken Corn Kernel Detection Device
2.2. Working Conditions
- (1)
- The LED light source is composed of 4 LED tubes, fixed in the inner side at the top of the frame, and located on both sides of the CCD camera; it provides a stable illumination intensity in the closed detection box to ensure the stability of the color characteristics of the collected corn kernel images, as shown in Figure 1a.
- (2)
- The DC motor (Baikong, 57BL115S21-230TF9, Shanghai, China) operates the drive shaft to rotate the synchronous belt, which transports the corn kernels to the image acquisition area.
- (3)
- The image acquisition system adopts a CCD camera (Medway Vision Company, MV-GE200C-T). It is perpendicular to the timing belt and fixed above the device by a bracket. The images of corn kernels collected by CCD camera are transmitted to the image processor system through the Gigabit network cable.
- (4)
- The image processing system is the Jeston TX2 Development Board of NVIDIA Corporation, which adopts NVIDIA PascalTM GPU architecture, has 56 NVIDIA CUDA cores, and 8 GB of running memory [11]. The board has the advantages of small size and fast processing speed, and meets the requirements of onboard application for real-time, convenient installation, and processor portability.
2.3. Working Principle
2.4. Experiment Method
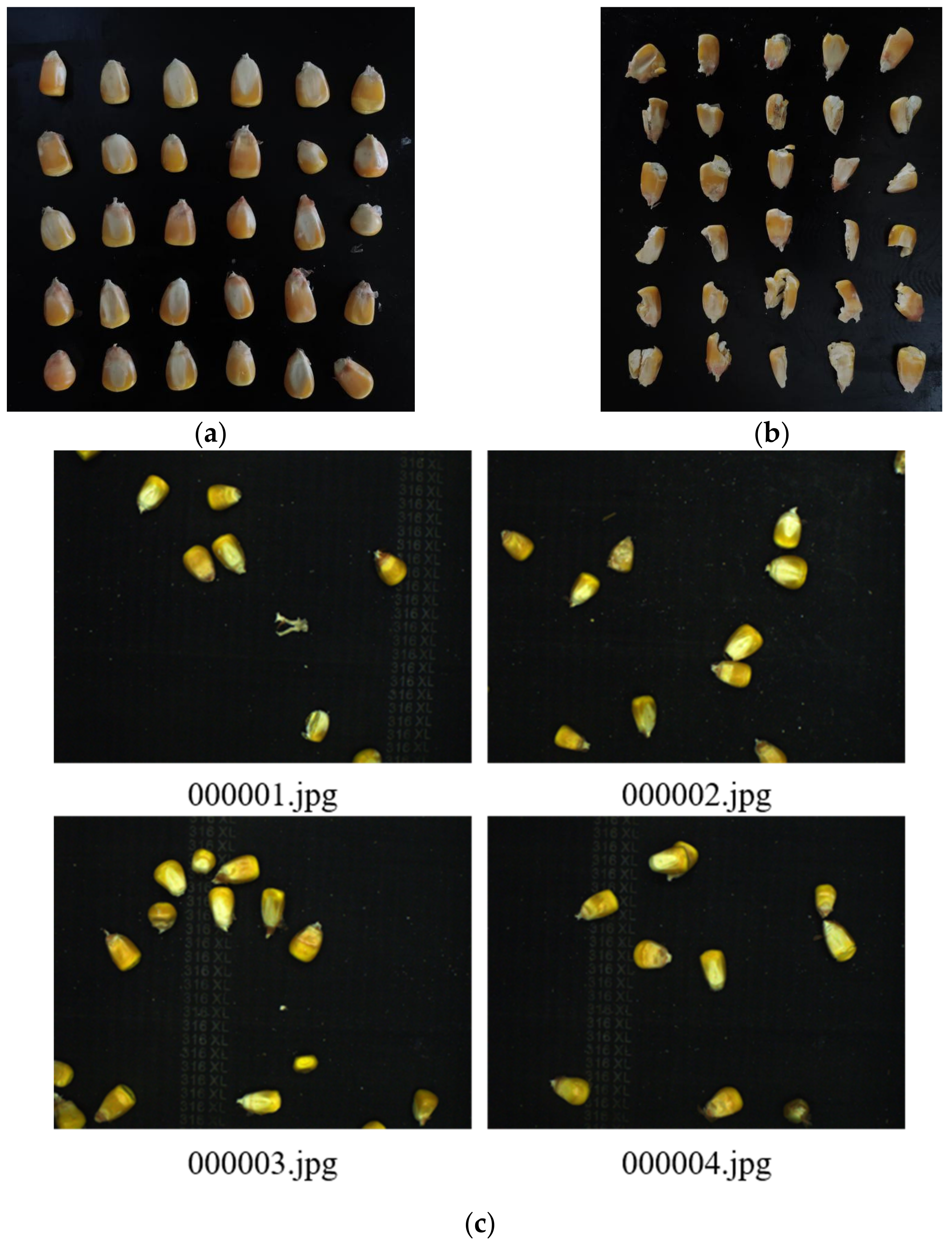
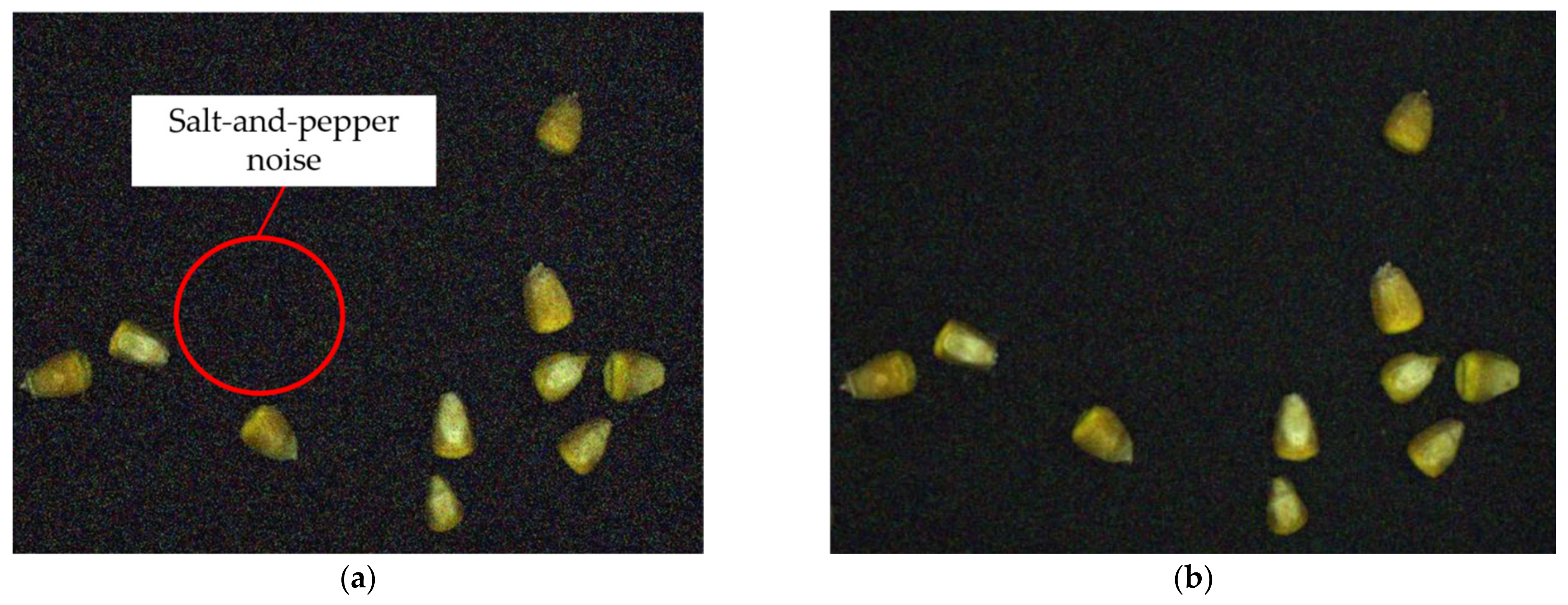
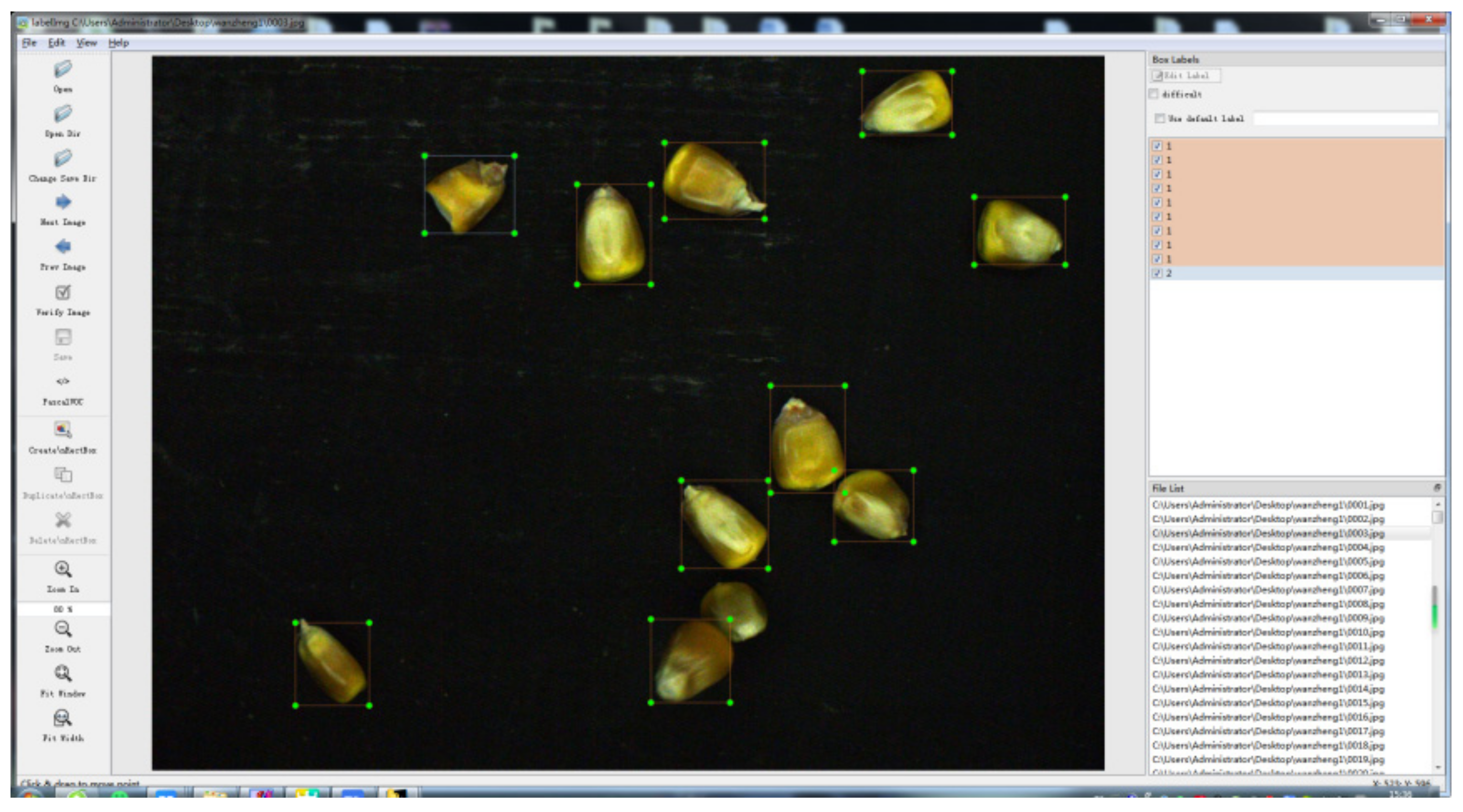
2.5. Image Acquisition
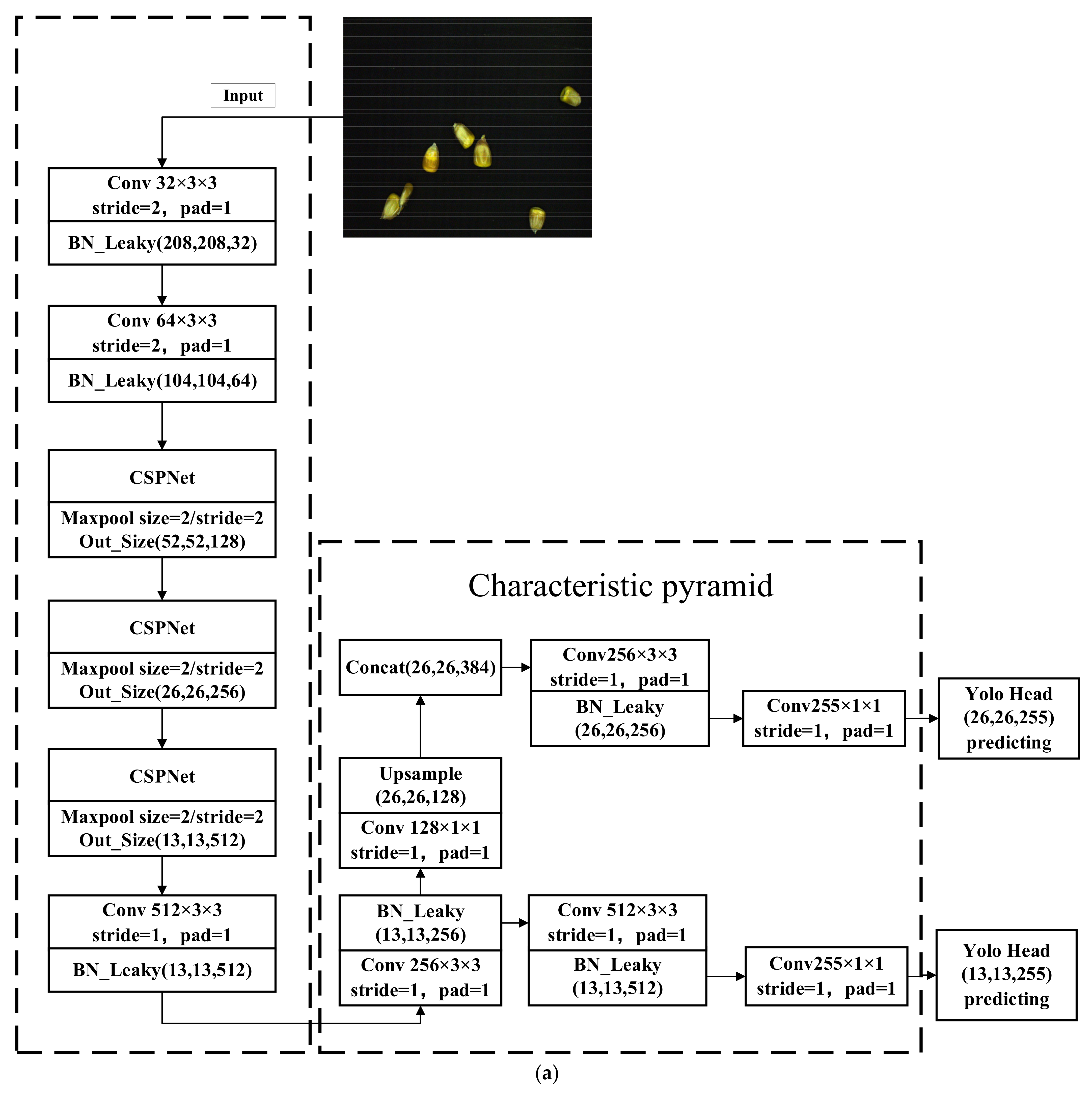
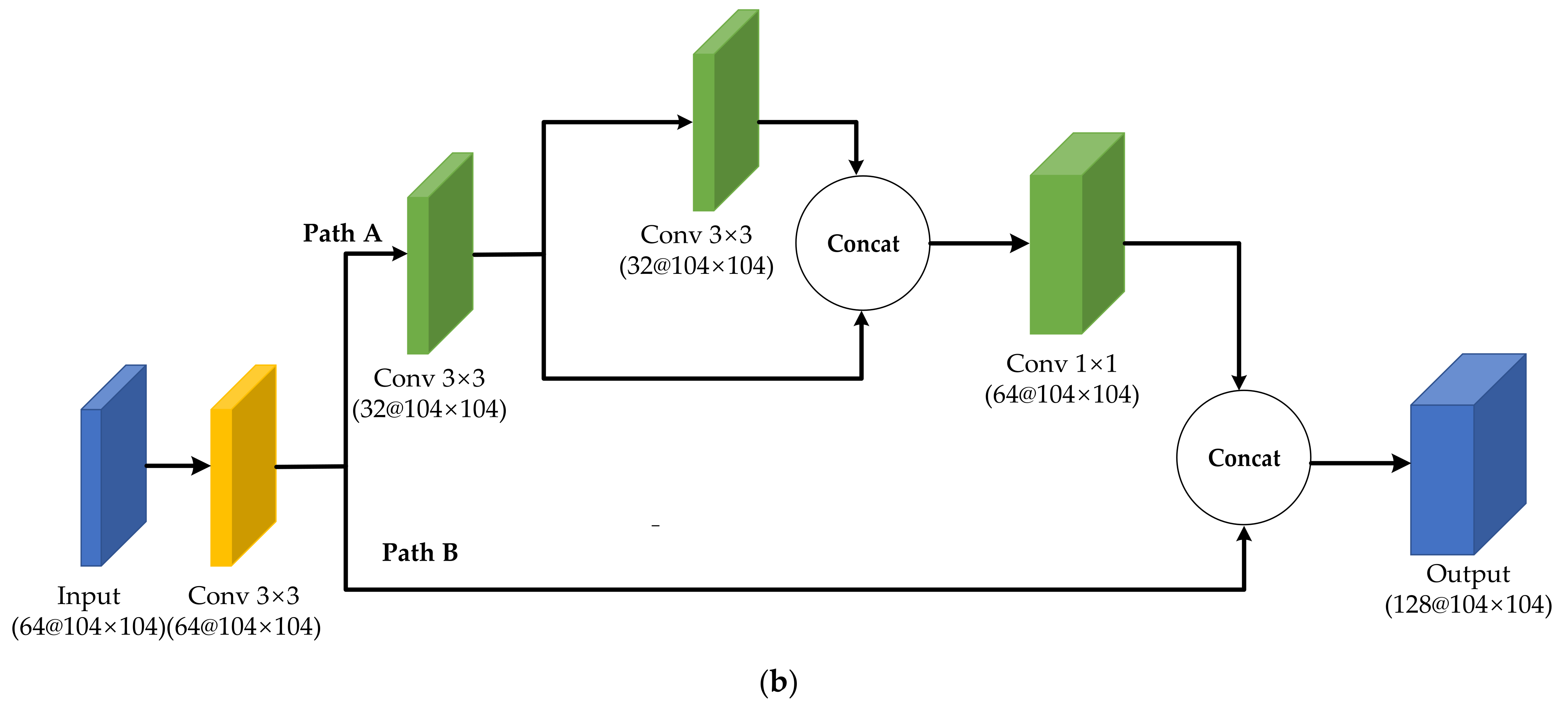
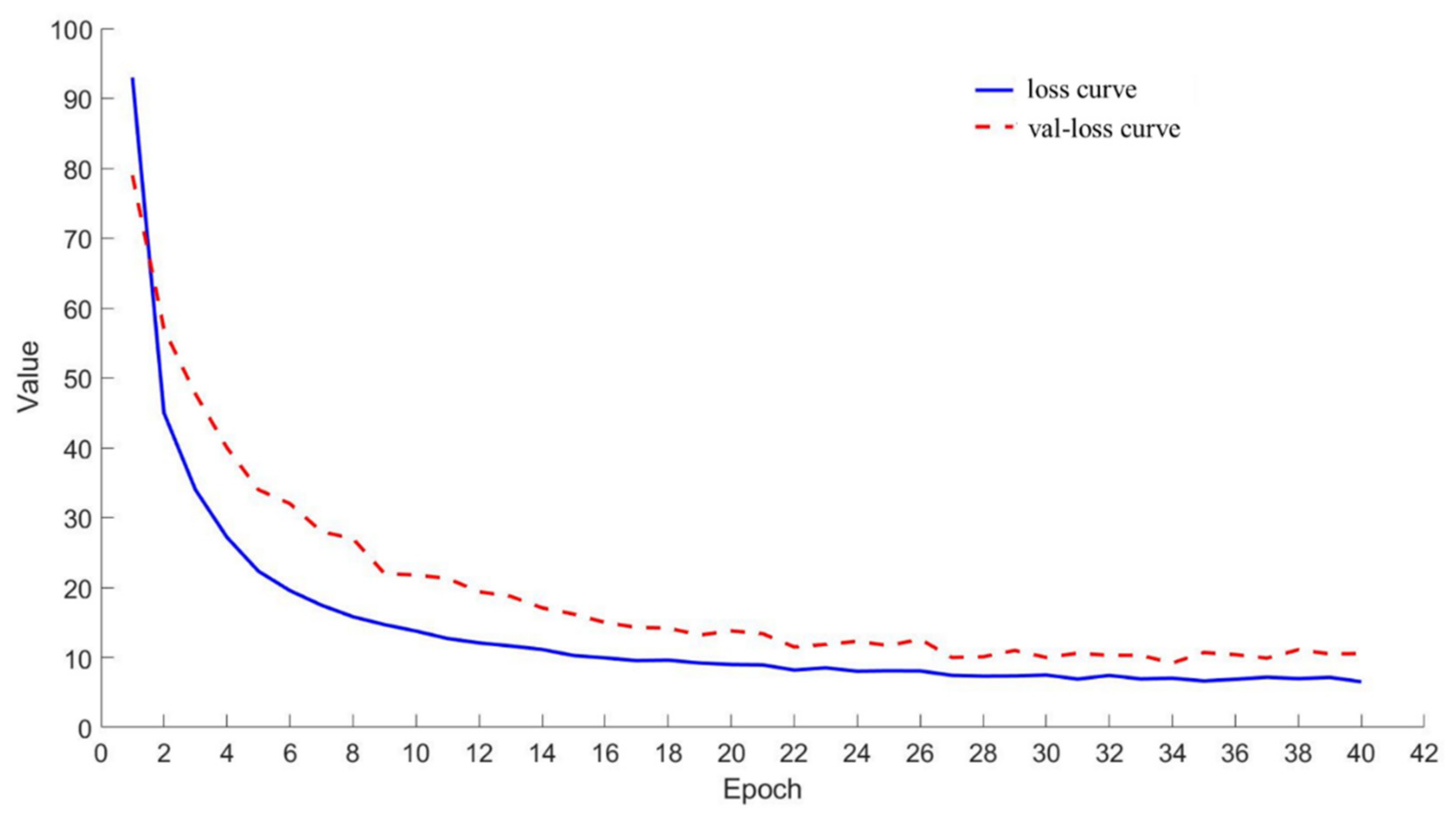
2.6. Training of the Yolov4-Tiny Model
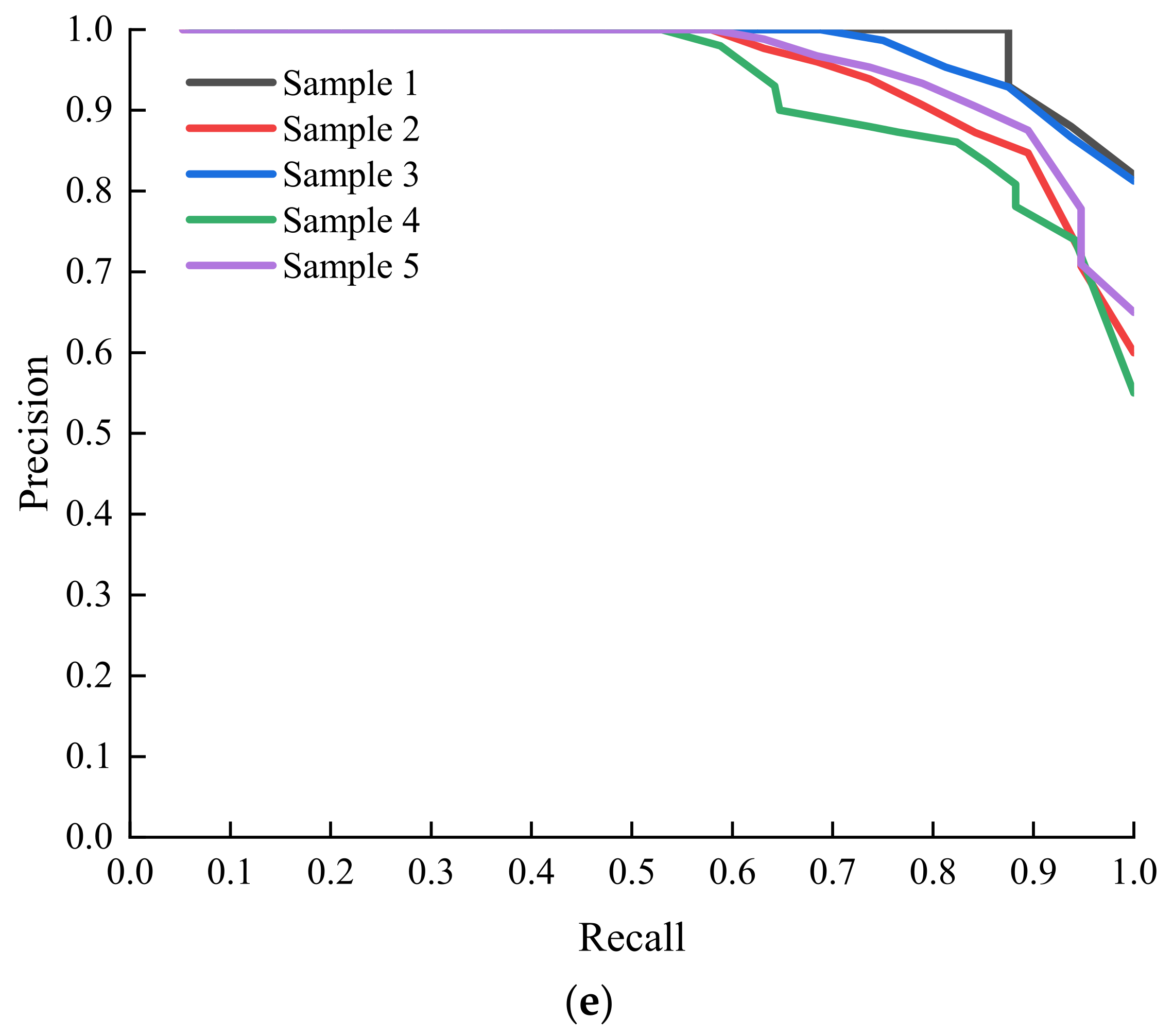
2.7. Evaluation of the Yolov4-Tiny Model
3. Results and Discussion
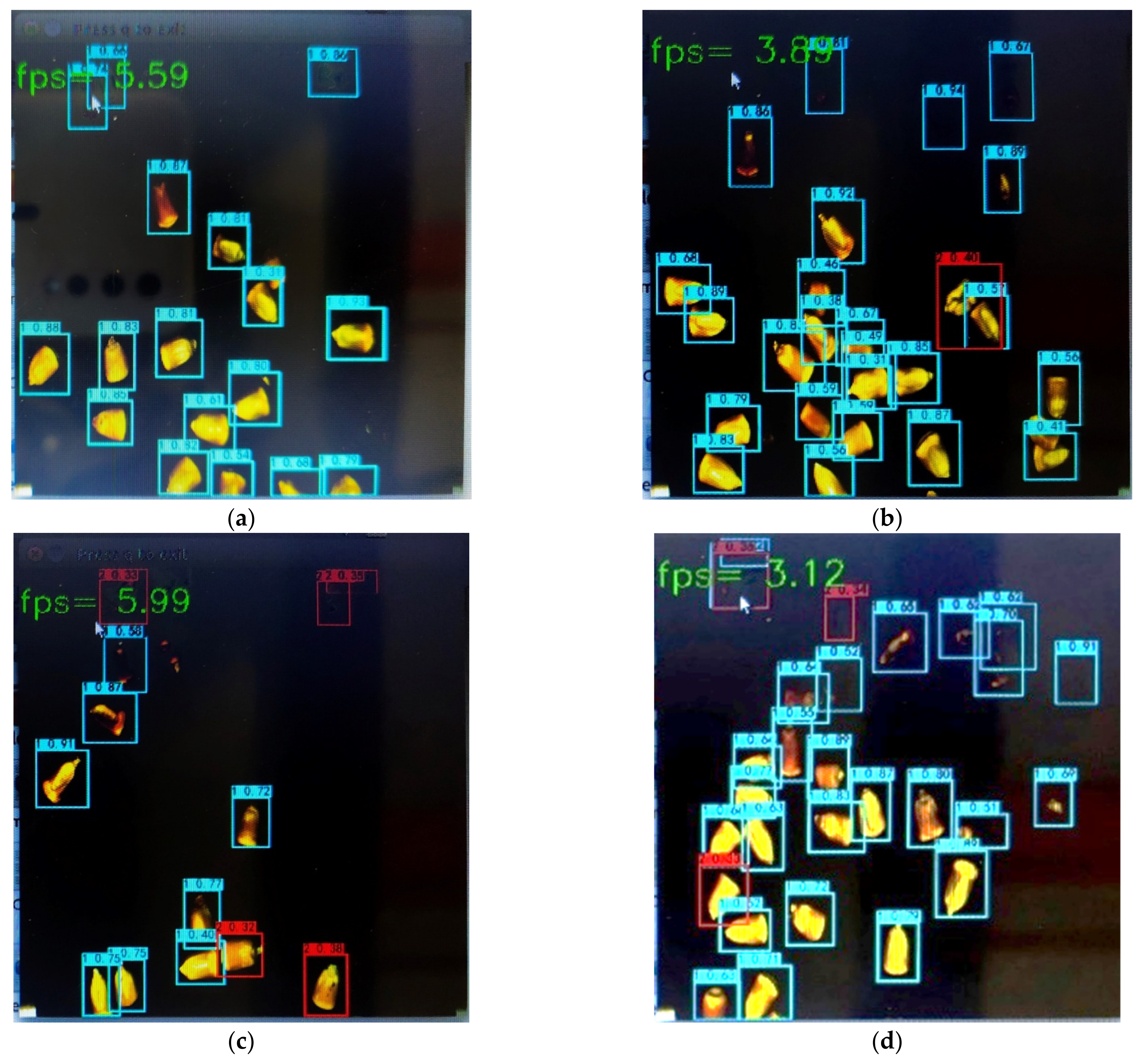
3.1. Laboratory Experiment Results
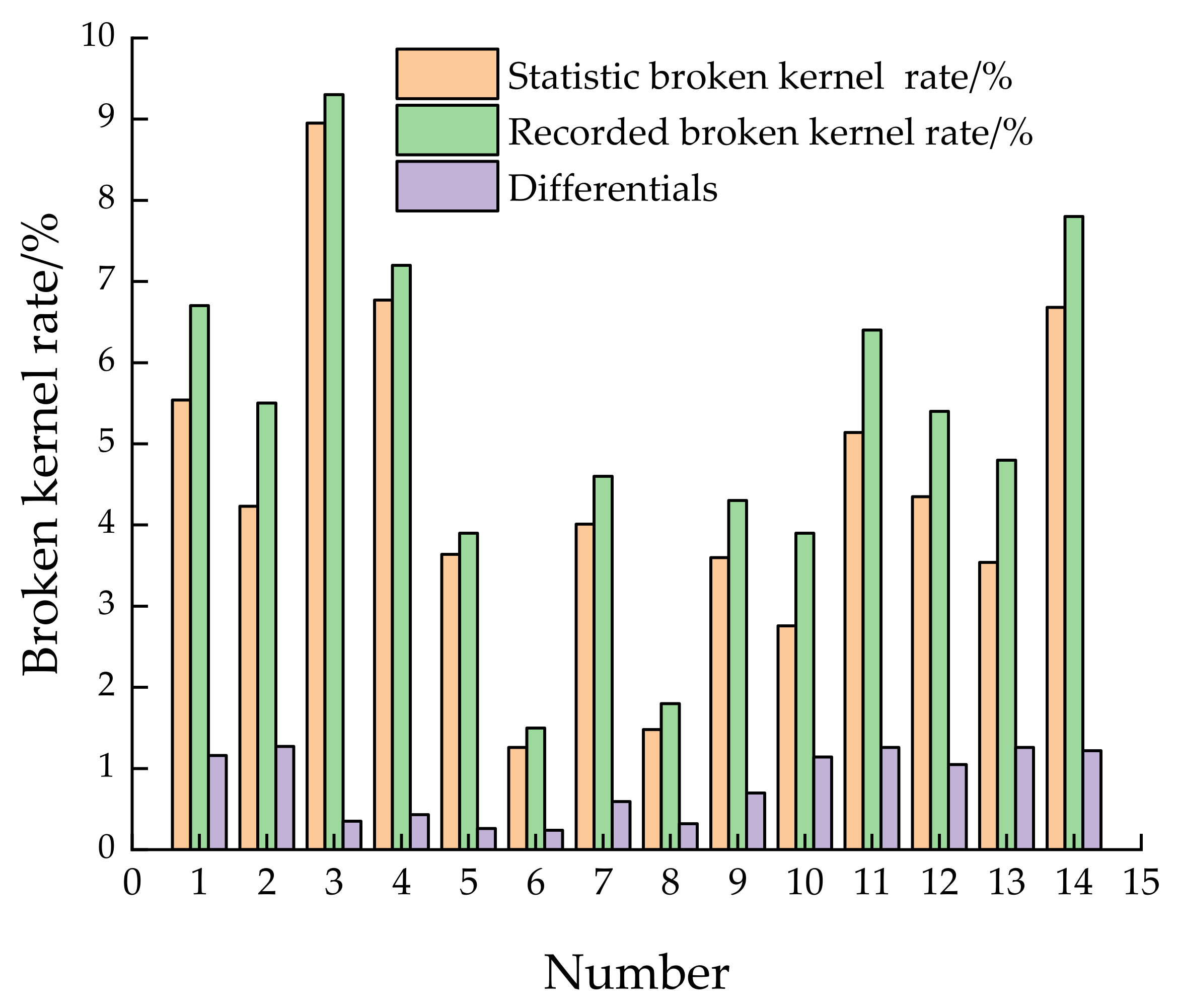
3.2. Field Experiment Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Perugachi-Diaz, Y.; Tomczak, J.; Bhulai, S. Deep learning for white cabbage seedling prediction. Comput. Electron. Agric. 2021, 184, 106059. [Google Scholar] [CrossRef]
- Chen, J.; Chen, J.; Zhang, D.; Sun, Y.; Nanehkaran, Y. Using deep transfer learning for image-based plant disease identification. Comput. Electron. Agric. 2020, 173, 105393. [Google Scholar] [CrossRef]
- Altuntaș, Y.; Cömert, Z.; Kocamaz, A. Identification of haploid and diploid maize seeds using convolutional neural networks and a transfer learning approach. Comput. Electron. Agric. 2019, 163, 104874. [Google Scholar] [CrossRef]
- Mohanty, S.; Hughes, D.; Salathé, M. Using deep learning for image-based plant disease detection. Front. Plant Sci. 2016, 7, 1419. [Google Scholar] [CrossRef] [Green Version]
- Flores, P.; Zhang, Z.; Lgathinathane, C.; Jithin, M.; Naik, D.; Stenger, J.; Ransom, J.; Kiran, R. Distinguishing seedling volunteer corn from soybean through greenhouse color, color-infrared, and fused images using machine and deep learning. Ind. Crop. Prod. 2021, 161, 113223. [Google Scholar] [CrossRef]
- Rasmussen, C.; Kirk, K.; Moeslund, T. Anchor tuning in Faster R-CNN for measuring corn silage physical characteristics. Comput. Electron. Agric. 2021, 188, 106344. [Google Scholar] [CrossRef]
- Monhollen, N.; Shinners, K.; Friede, J.; Rocha, E.; Luck, B. In-field machine vision system for identifying corn kernel losses. Comput. Electron. Agric. 2020, 174, 105496. [Google Scholar] [CrossRef]
- Suo, R.; Gao, F.; Zhou, Z.; Fu, L.; Song, Z.; Dhupia, J.; Li, R.; Cui, Y. Improved multi-classes kiwifruit detection in orchard to avoid collisions during robotic picking. Comput. Electron. Agric. 2021, 182, 106052. [Google Scholar] [CrossRef]
- Zhang, Q.; Bao, X.; Wu, B.; Tu, X.; Jin, Y.; Luo, Y.; Zhang, N. Water meter pointer reading recognition method based on target-key point detection. Flow Meas. Instrum. 2021, 81, 102012. [Google Scholar] [CrossRef]
- Li, X.; Pan, J.; Xie, F.; Zeng, J.; Li, Q.; Huang, X.; Liu, D.; Wang, X. Fast and accurate green pepper detection in complex backgrounds via an improved Yolov4-tiny model. Comput. Electron. Agric. 2021, 191, 106503. [Google Scholar] [CrossRef]
- Giubilato, R.; Chiodini, S.; Pertile, M.; Debei, S. An evaluation of ROS-compatible stereo visual SLAM methods on a nVidia Jetson TX2. Measurement 2019, 140, 161–170. [Google Scholar] [CrossRef]
- GB/T 21961-2008. Test Methods for Maize Combine Harvester. In Administration of Quality Supervision, Inspection and Quarantine of People’s Republic of China; Standardization Administration of China: Beijing, China, 2008. [Google Scholar]
- GB/T 21962-2020. Corn combine harvesters. In State Administration of Market Supervision; State Administration for Standardization of China: Beijing, China, 2020. [Google Scholar]
- Renata, F.; Jadwiga, K.; Slawomir, F.; Ryszard, G.; Miroslaw, K. Bis(4,4′-dimethyl-2, 2′-bipyridine) oxidovanadium (IV) sulfate dehydrate: Potential candidate for controlling lipid metabolism. BioMed Res. Int. 2017, 6950516. [Google Scholar] [CrossRef]
- Jestinah, M.; Mahachie, J.; Francois Van, L.; Elena, S.G.; Kristel Van, S. A robustness study of parametric and nonparametric tests in model-based multifactor dimensionality reduction for epistasis detection. BioData Min. 2013, 6, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Mafi, M.; Martin, H.; Cabrerizo, M.; Andrian, J.; Barreto, A.; Adjouadi, M. A comprehensive survey on impulse and Gaussian denoising filters for digital images. Signal Process. 2019, 157, 236–260. [Google Scholar] [CrossRef]
- Thanh, D.; Hien, N.; Kalavathi, P.; Prasath, V. Adaptive switching weight mean filter for salt and pepper image denoising. Procedia Comput. Sci. 2020, 171, 292–301. [Google Scholar] [CrossRef]
- Lu, C.; Chou, T. Denoising of salt-and-pepper noise corrupted image using modified directional-weighted-median filter. Pattern Recognit. Lett. 2012, 33, 1287–1295. [Google Scholar] [CrossRef]
- Liang, L.; Deng, S.; Gueguen, L.; Wei, M.; Wu, X.; Qin, J. Convolutional neural network with median layers for denoising salt-and-pepper contaminations. Neurocomputing 2021, 442, 26–35. [Google Scholar] [CrossRef]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. Yolov4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. https://arxiv.org/abs/2004.10934. [Google Scholar]
- Hui, T.; Xu, Y.; Jarhinbek, R. Detail texture detection based on Yolov4-tiny combined with attention mechanism and bicubic interpolation. IET Image Process. 2021, 15, 2736–2748. [Google Scholar] [CrossRef]
- Silva, D.; Santos, F.; Sousa, A.; Jorge, S.; Vitor, F. Visible and thermal image-based trunk detection with deep learning for forestry mobile. J. Imaging 2021, 7, 176. [Google Scholar] [CrossRef] [PubMed]
- Parico, A.; Ahamed, T. Real time pear fruit detection and counting using Yolov4 models and seep sort. Sensor 2021, 21, 4803. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Gao, K.; Jiang, H.; Zhou, H. Method for detecting dragon fruit based on improved lightweight convolutional neural network. Trans. Chin. Soc. Agric. Eng. 2020, 36, 218–225. [Google Scholar] [CrossRef]
- He, D.; Zou, Z.; Chen, Y.; Liu, B.; Yao, X.; Shan, S. Obstacle detection of rail transit based on deep learning. Measurement 2021, 176, 109241. [Google Scholar] [CrossRef]
- Oostwal, E.; Straat, M.; Biehl, M. Hidden unit specialization in layered neural networks: ReLU vs. sigmoidal activation. Phys. A Stat. Mech. Appl. 2021, 564, 125517. [Google Scholar] [CrossRef]
- Guo, X.; Zhao, X.; Liu, Y.; Li, D. Underwater sea cucumber identification via deep residual networks. Inf. Process. Agric. 2019, 6, 307–315. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Threshing Cylinder Speed/(r·min−1) | Concave Clearance/mm | Operating Speed/(km·h−1) |
|---|---|---|---|
| 1 | 300 | 35 | 3.0 |
| 2 | 300 | 40 | 3.5 |
| 3 | 300 | 35 | 4.0 |
| 4 | 300 | 30 | 3.5 |
| 5 | 350 | 35 | 3.5 |
| 6 | 350 | 40 | 3.0 |
| 7 | 350 | 30 | 4.0 |
| 8 | 350 | 35 | 3.5 |
| 9 | 350 | 40 | 4.0 |
| 10 | 350 | 30 | 3.0 |
| 11 | 400 | 35 | 4.0 |
| 12 | 400 | 35 | 3.0 |
| 13 | 400 | 40 | 3.5 |
| 14 | 400 | 30 | 3.5 |
| Configuration | Parameter |
|---|---|
| CPU | HMP Dual Denver; ARM Cortex-A57 Quadcore |
| GPU | 256 core NVIDIA Pascal |
| Accelerated environment | CUDA10.1 |
| Development environment | Ubuntu 20.04.3 LTS |
| Operating system | Linux |
| Category | Number of Identified as Intact Corn Kernels | Number of Identified as Broken Corn Kernels | Accuracy of Detection Model/% |
|---|---|---|---|
| Intact corn kernels | 374 (TP) | 26 (FN) | 93.5% |
| Broken corn kernels | 29 (FP) | 372 (TN) | 93.0% |
| Number | TP | FP | FN | Precision | Recall |
|---|---|---|---|---|---|
| 1 | 82 | 4 | 6 | 95.35 | 93.18 |
| 2 | 103 | 11 | 4 | 90.35 | 96.26 |
| 3 | 89 | 4 | 4 | 95.70 | 95.70 |
| 4 | 77 | 7 | 4 | 91.67 | 95.06 |
| 5 | 102 | 12 | 10 | 89.47 | 91.07 |
| 6 | 105 | 6 | 8 | 94.59 | 92.92 |
| 7 | 94 | 8 | 7 | 92.16 | 93.07 |
| 8 | 92 | 4 | 6 | 95.83 | 93.88 |
| 9 | 81 | 6 | 6 | 93.10 | 93.10 |
| 10 | 112 | 10 | 16 | 91.80 | 87.50 |
| 11 | 107 | 9 | 14 | 92.24 | 88.43 |
| 12 | 96 | 7 | 12 | 93.20 | 88.89 |
| 13 | 91 | 11 | 8 | 89.22 | 91.92 |
| 14 | 88 | 9 | 7 | 90.72 | 92.63 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Du, Y.; Yao, L.; Wu, J.; Liu, L. Design and Experiment of a Broken Corn Kernel Detection Device Based on the Yolov4-Tiny Algorithm. Agriculture 2021, 11, 1238. https://doi.org/10.3390/agriculture11121238
Li X, Du Y, Yao L, Wu J, Liu L. Design and Experiment of a Broken Corn Kernel Detection Device Based on the Yolov4-Tiny Algorithm. Agriculture. 2021; 11(12):1238. https://doi.org/10.3390/agriculture11121238
Chicago/Turabian StyleLi, Xiaoyu, Yuefeng Du, Lin Yao, Jun Wu, and Lei Liu. 2021. "Design and Experiment of a Broken Corn Kernel Detection Device Based on the Yolov4-Tiny Algorithm" Agriculture 11, no. 12: 1238. https://doi.org/10.3390/agriculture11121238