
A Review of Methods and Techniques for Detecting Frost on Plant Surfaces



Abstract
:1. Introduction
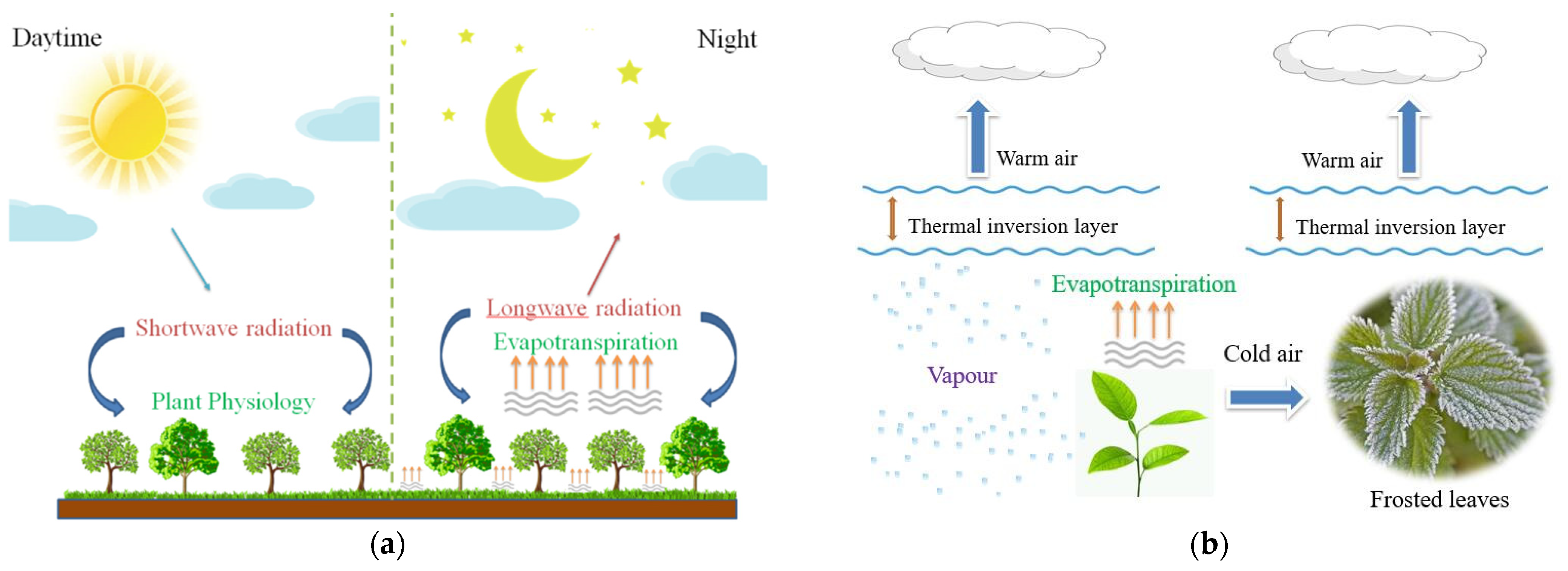
1.1. Principle of Frost Formation on Plant Surfaces
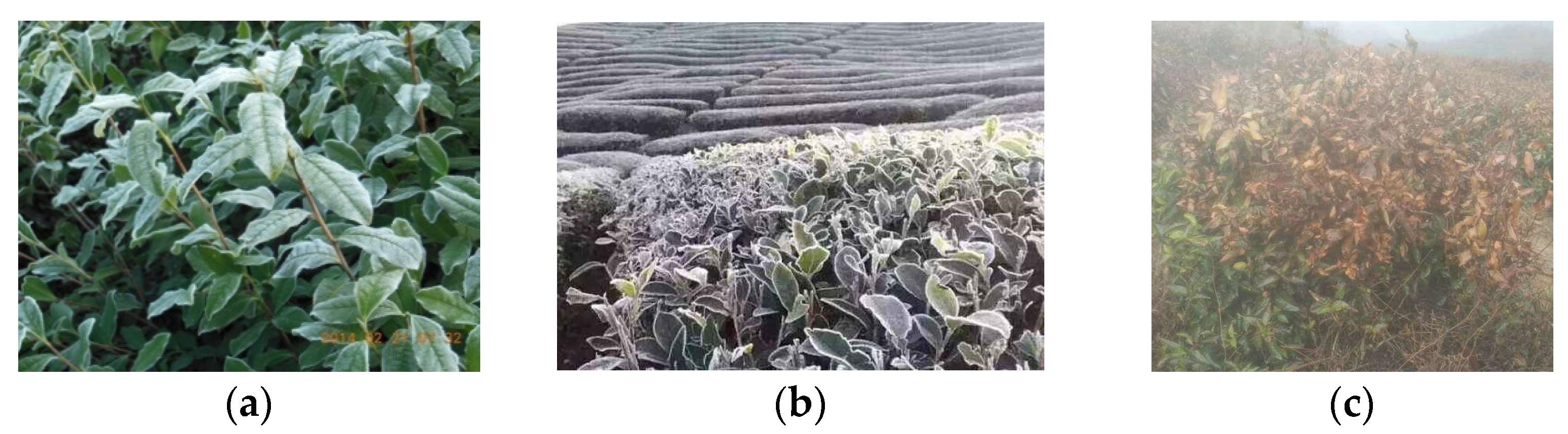
1.2. Frost Severities Classification
1.3. The Importance of Frost Detection
1.4. Frost Observation and Monitoring
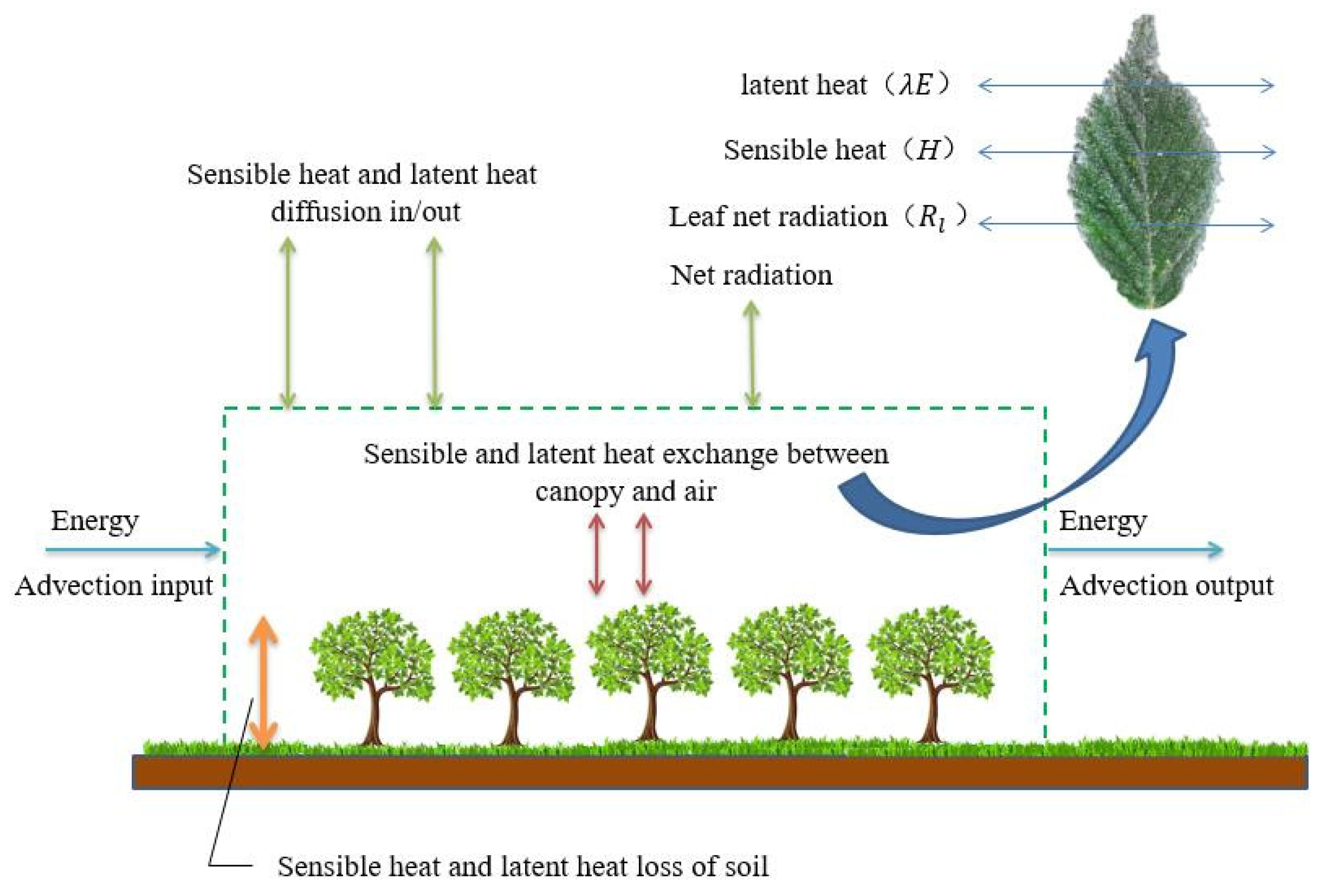
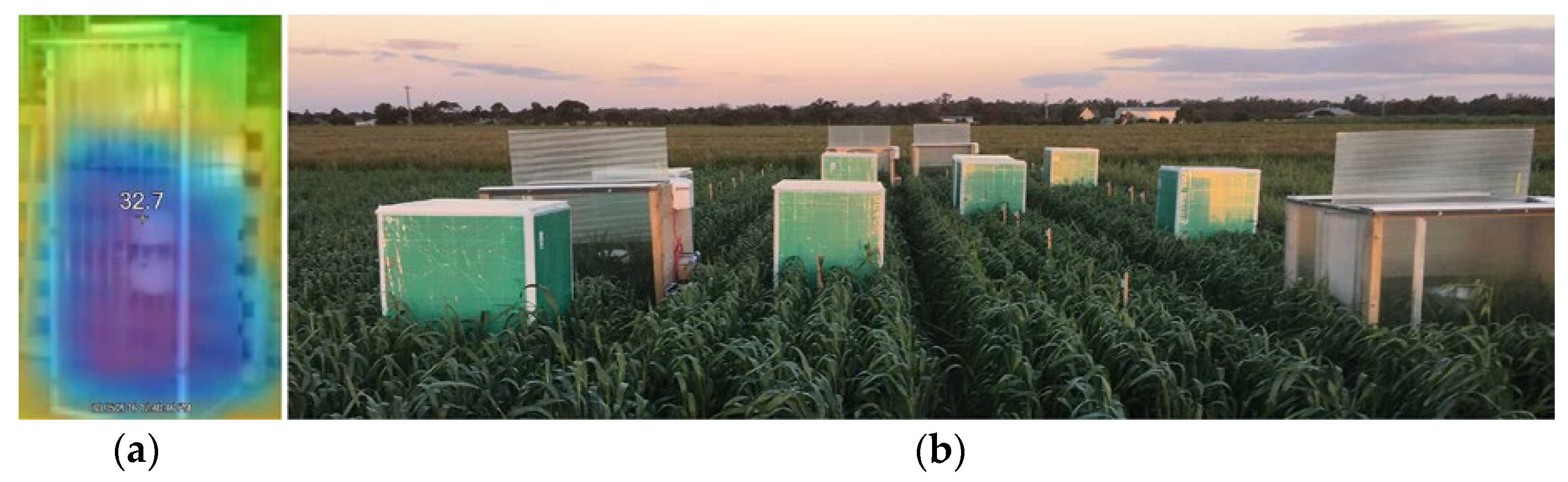
1.4.1. Micrometeorological Model Observation
1.4.2. Spectrum and Remote-Sensing Model Monitoring
2. Method and Technology for Detecting Frost on Leaf Surfaces—Contactless Detection
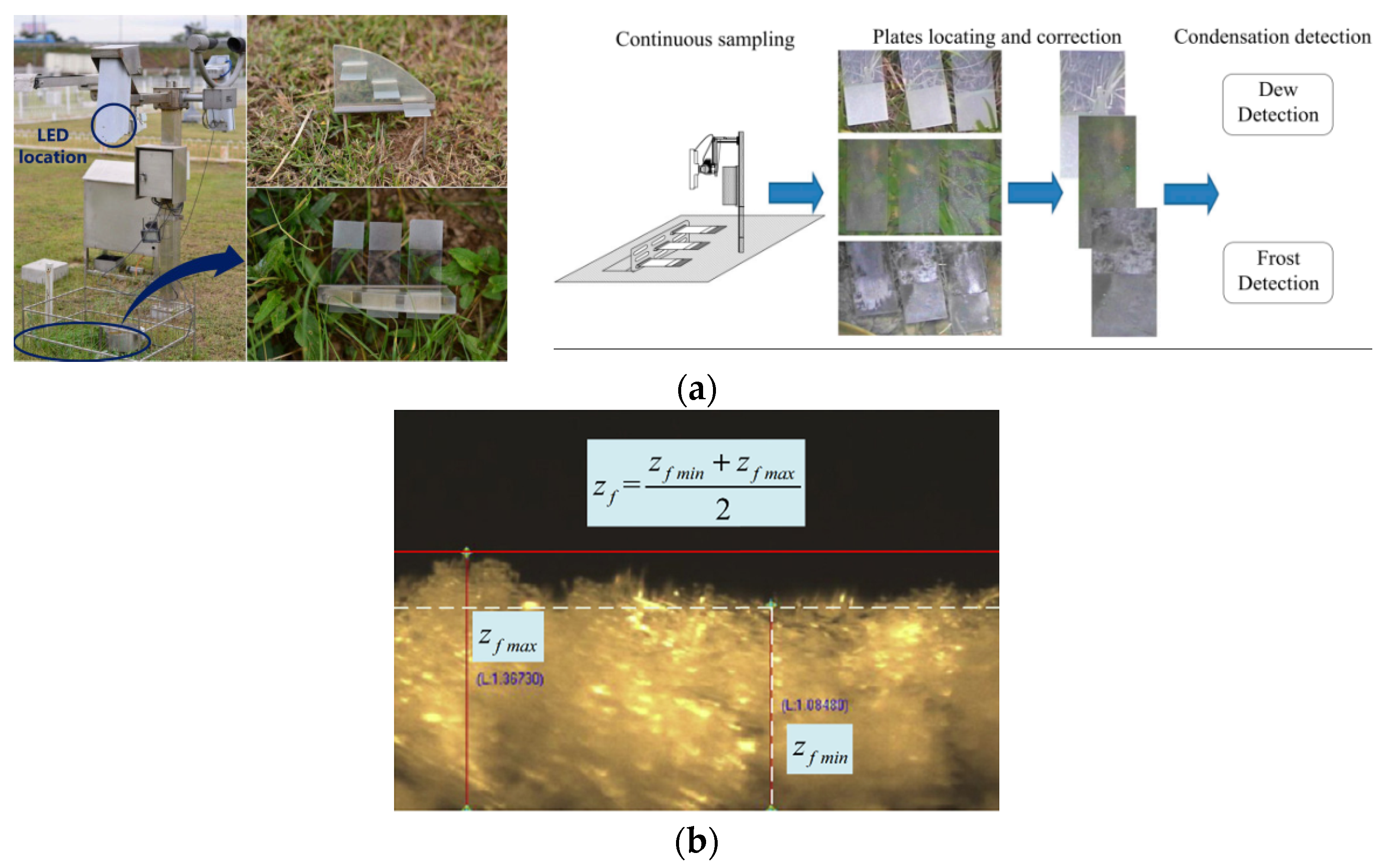
2.1. Image Recognition Detection
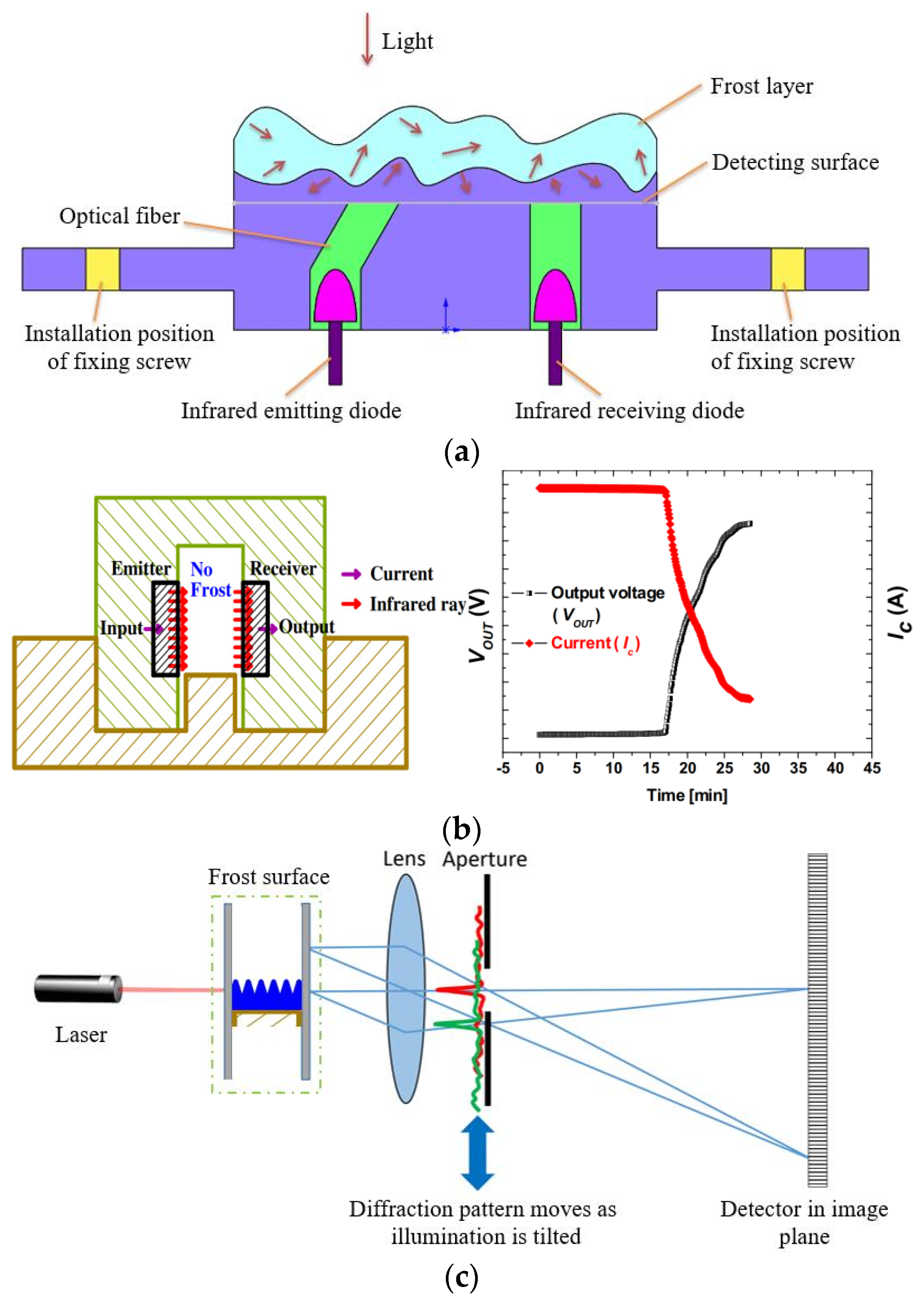
2.2. Optical Detection
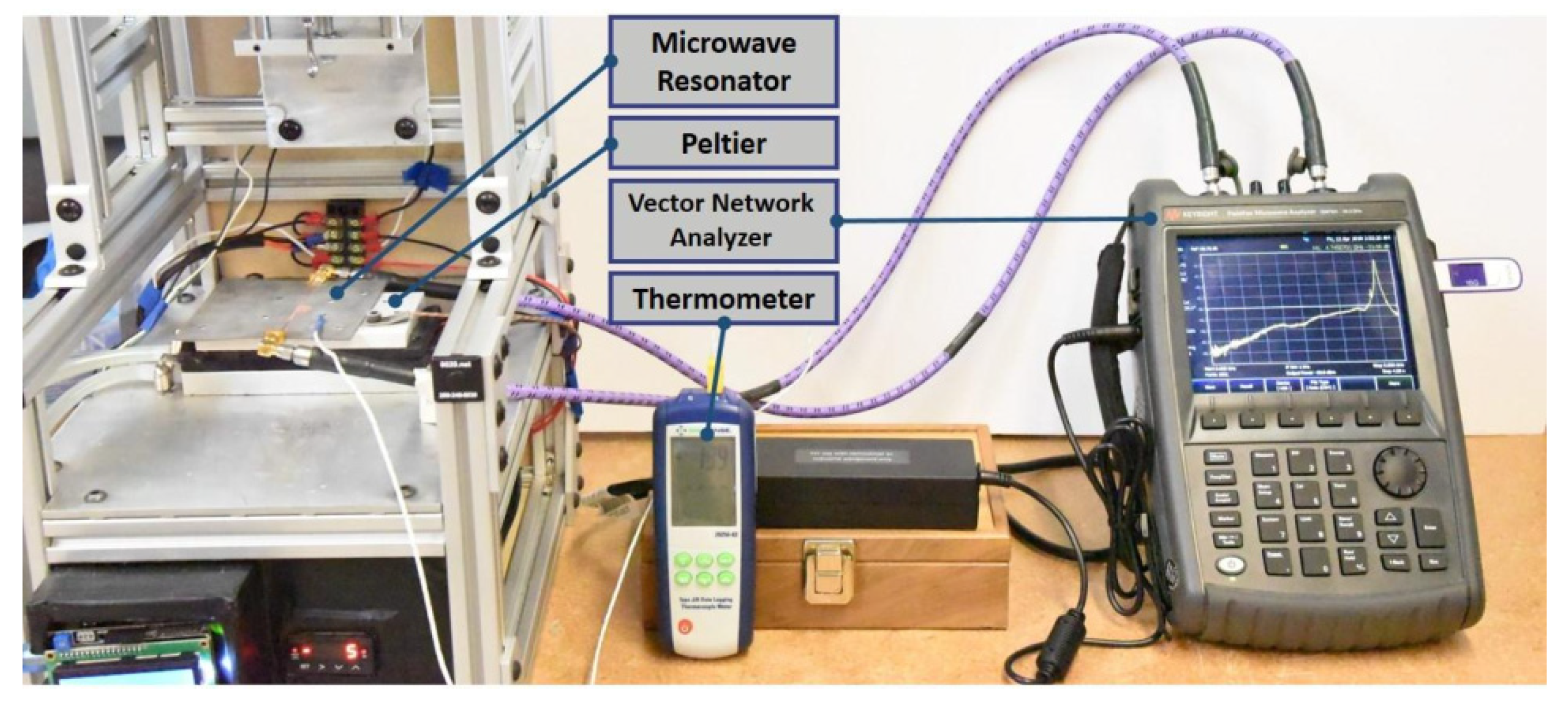
2.3. Microwave-Based Detection
3. Detection Method and Technology of Frost on Leaf Surfaces—Contact Detection
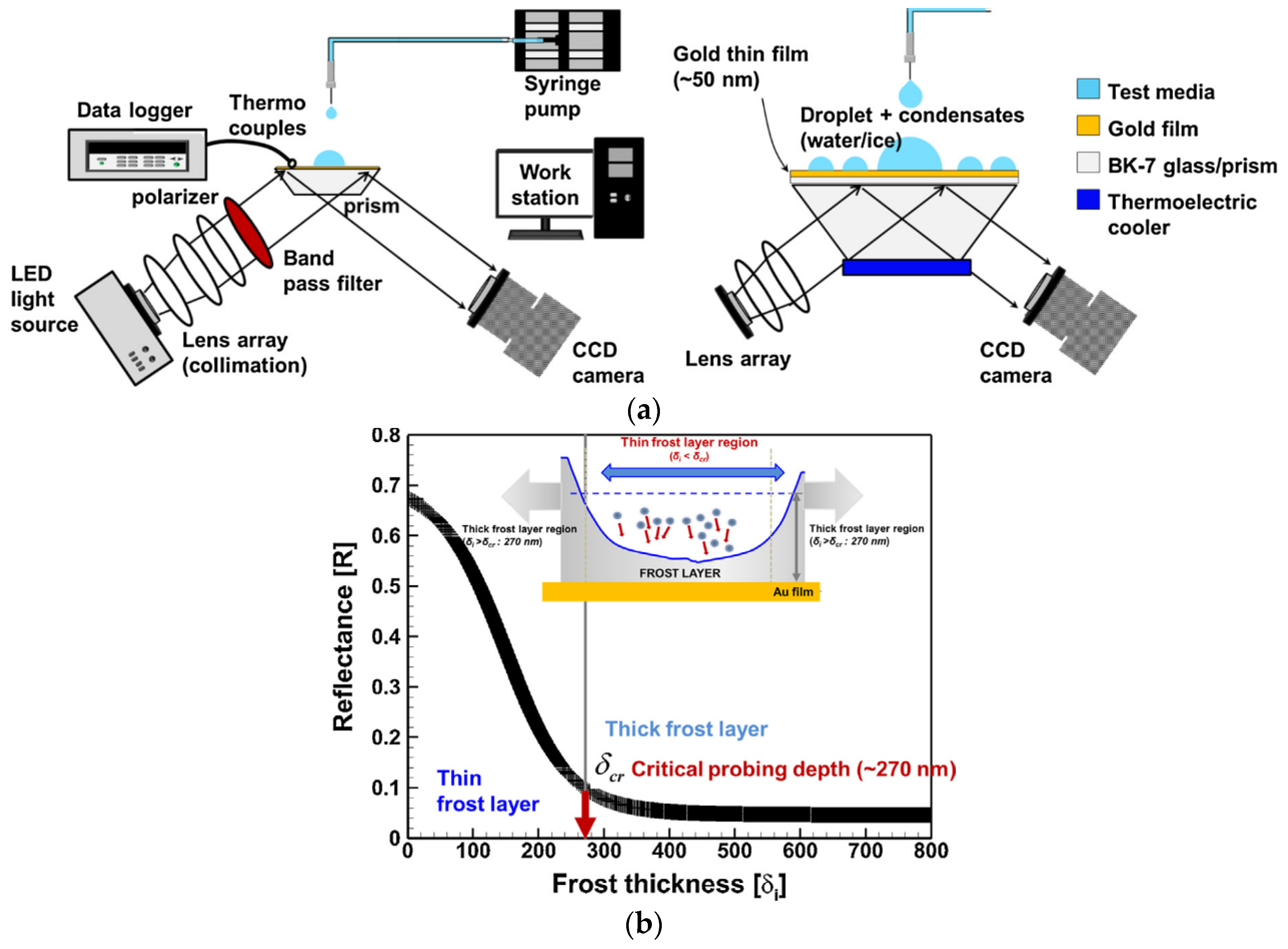
3.1. Surface Plasmon Resonance (SPR) Detection
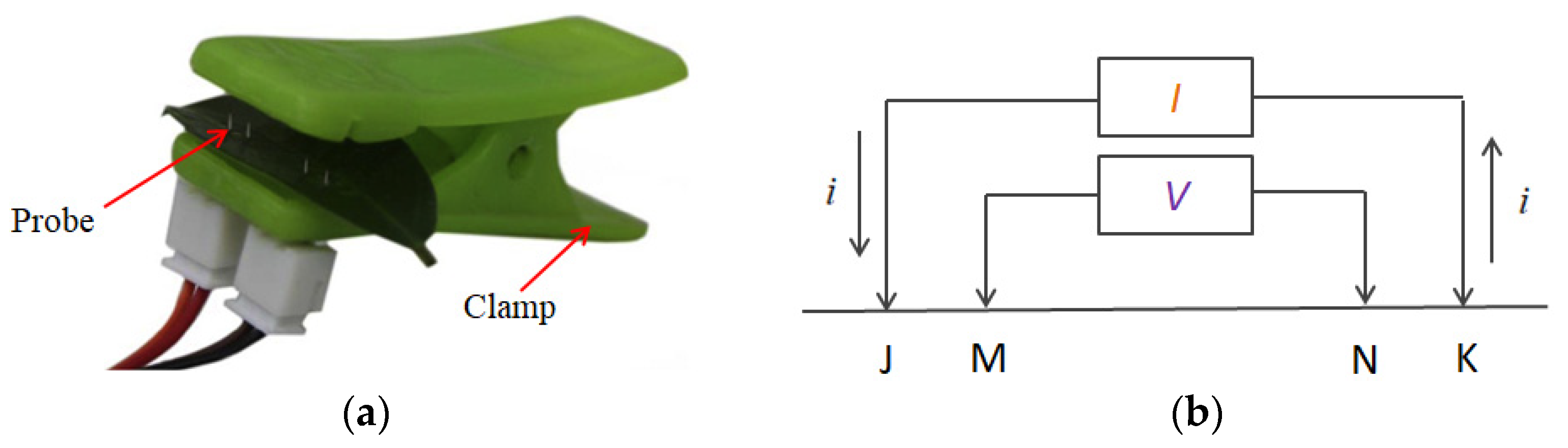
3.2. Plant Electrical Characteristics Detection
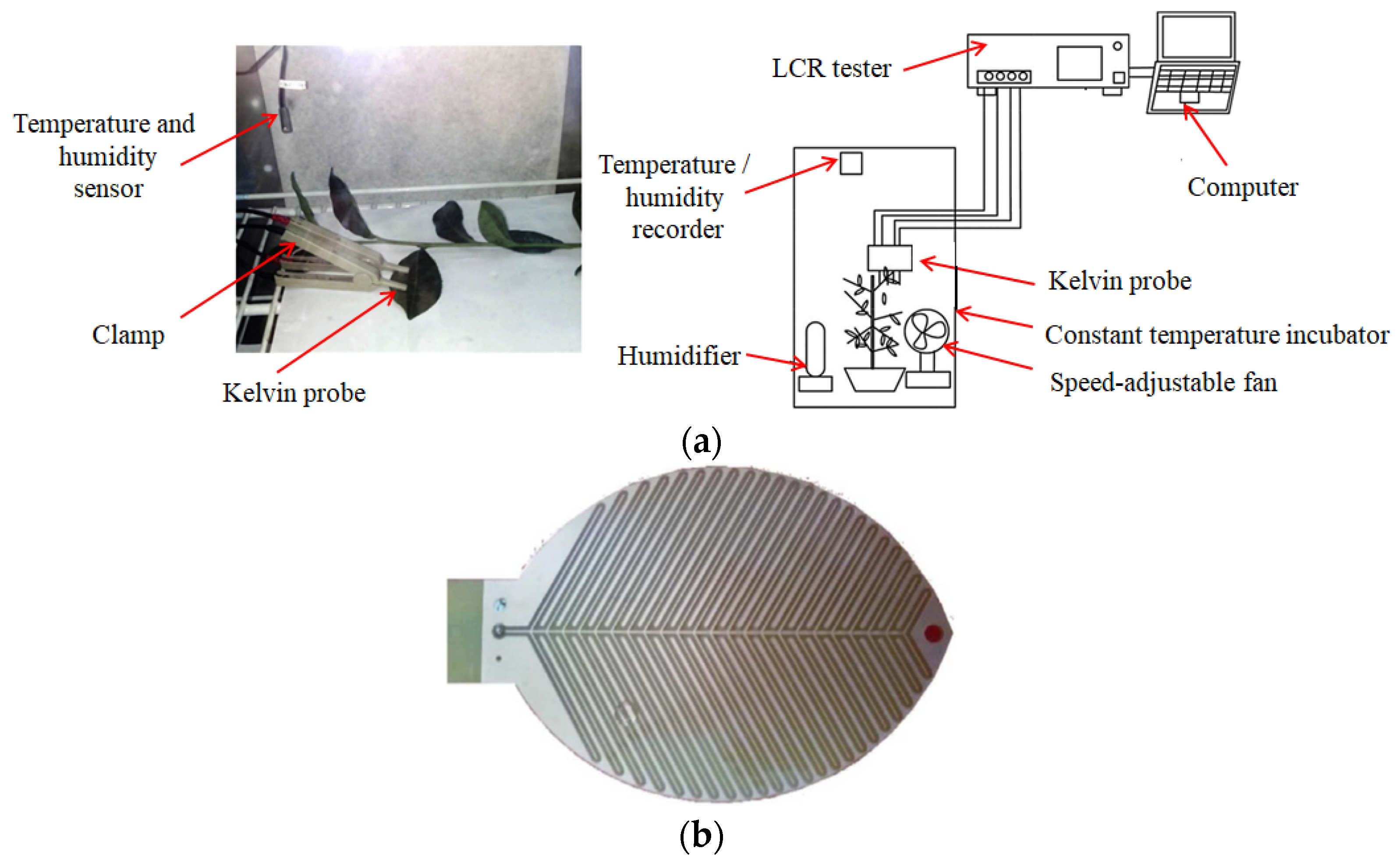
3.3. Capacitivity-Based Detection
3.4. Dielectric Property-Based Detection
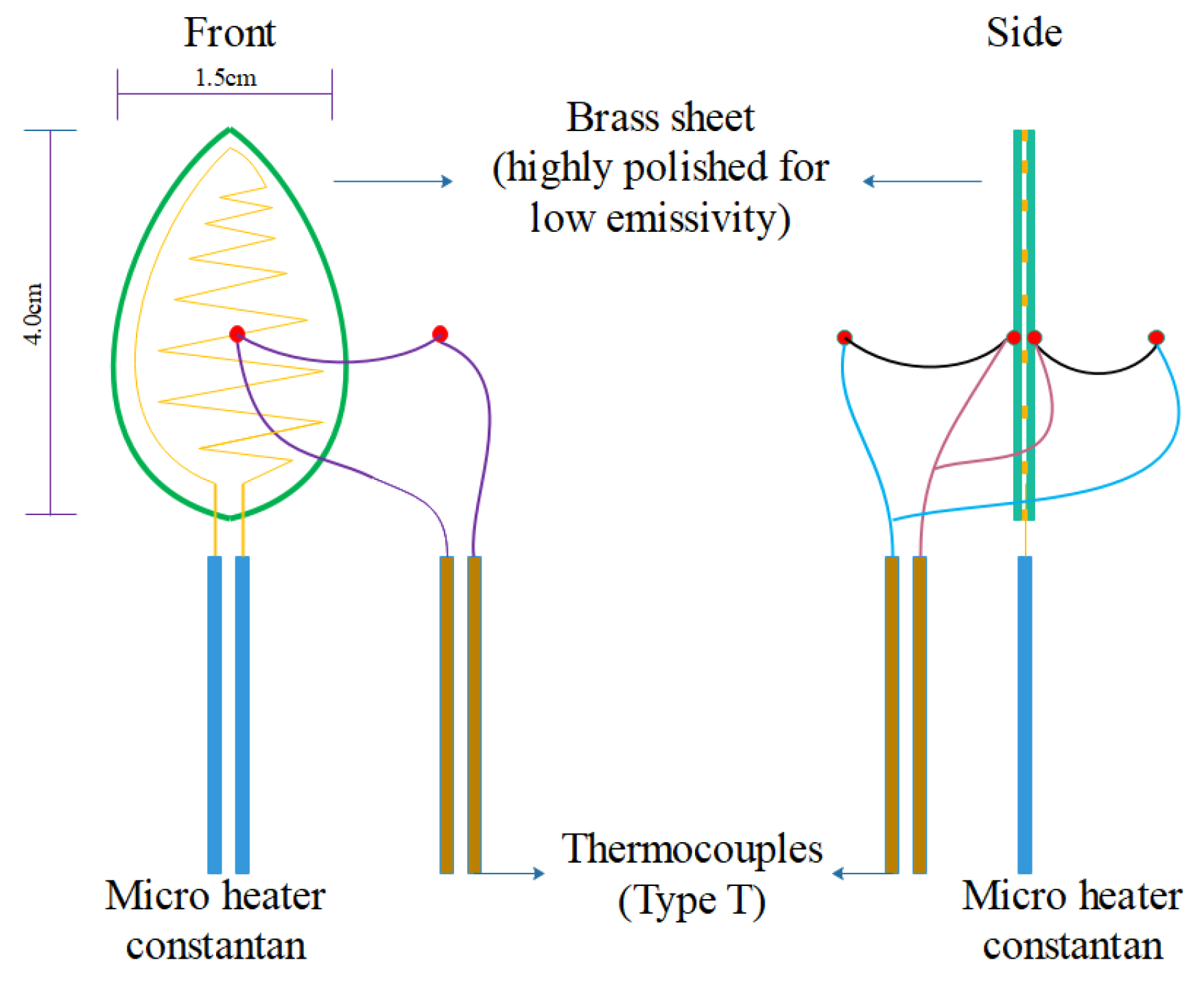
3.5. Pyroelectric Detection
4. Comparison of Detection Performance
4.1. Summary and Discussion of Frost Detection Methods
4.2. Key Problem Analysis—Frost Quantity
4.2.1. Frost Layer Density
4.2.2. Frost Layer Thermal Conductivity
4.2.3. Frost Layer Thickness
5. Future Research Proposal
5.1. Research and Development
5.2. Based on the Spectral Analysis Methods
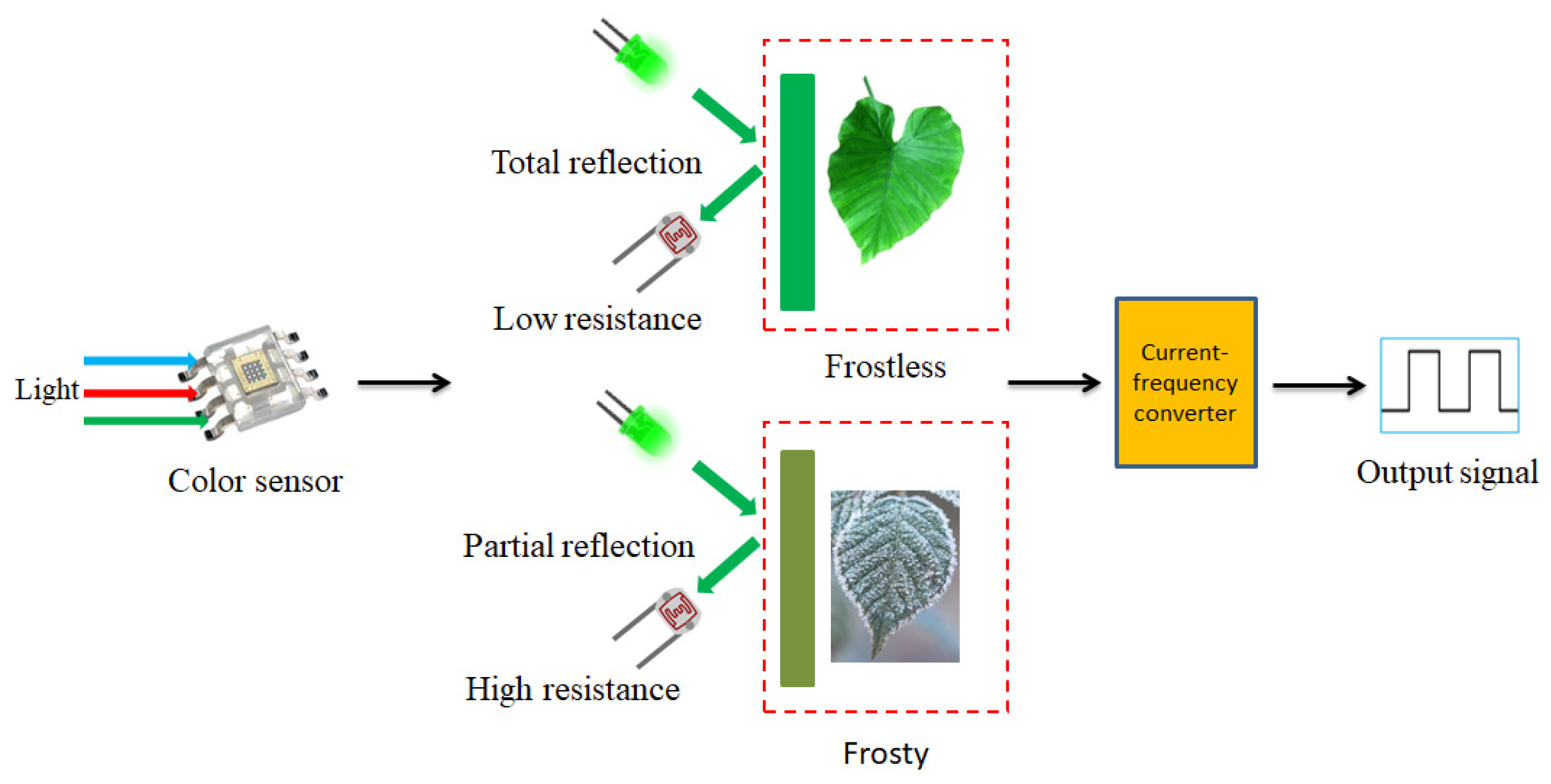
5.3. Based on the Color Sensing Technology
5.4. Based on Deep Learning Methods
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sheng, W.; Liu, P.; Dang, C.; Liu, G. Review of restraint frost method on cold surface. Renew. Sustain. Energy Rev. 2017, 79, 806–813. [Google Scholar] [CrossRef]
- Seker, D.; Karatas, H.; Egrican, N. Frost formation on fin-and-tube heat exchangers. Part I—Modeling of frost formation on fin-and-tube heat exchangers. Int. J. Refrig. 2004, 27, 367–374. [Google Scholar] [CrossRef]
- Song, M.; Deng, S.; Dang, C.; Mao, N.; Wang, Z. Review on improvement for air source heat pump units during frosting and defrosting. Appl. Energy 2018, 211, 1150–1170. [Google Scholar] [CrossRef]
- Rafati Nasr, M.; Fauchoux, M.; Besant, R.; Simonson, C. A review of frosting in air-to-air energy exchangers. Renew. Sustain. Energy Rev. 2014, 30, 538–554. [Google Scholar] [CrossRef]
- Ribeiro, A.C.; De Melo-Abreu, J.P.; Snyder, R.L. Apple orchard frost protection with wind machine operation. Agric. For. Meteorol. 2006, 141, 71–81. [Google Scholar] [CrossRef]
- Rossi, F.; Facini, O.; Loreti, S.; Nardino, M.; Georgiadis, T.; Zinoni, F. Meteorological and micrometeorological applications to frost monitoring in northern Italy orchards. Phys. Chem. Earth Parts A B C 2002, 27, 1077–1089. [Google Scholar] [CrossRef]
- Black, P. Advances in Bioclimatology, Vol. 2: The Bioclimatology of Frost. Its Occurrence, Impact and Protection. J. Environ. Qual. 1993, 22, 635. [Google Scholar] [CrossRef]
- Paw, U.K.T.; Gao, W. Applications of solutions to non-linear energy budget equations. Agric. For. Meteorol. 1988, 43, 121–145. [Google Scholar] [CrossRef]
- Huschke, R.E. Glossary of Meteorology; American Meteorological Society: Boston, MA, USA, 1959; p. 638. [Google Scholar]
- Lee, Y.B.; Ro, S.T. Frost formation on a vertical plate in simultaneously developing flow. Exp. Therm. Fluid Sci. 2002, 26, 939–945. [Google Scholar] [CrossRef]
- Tao, Y.; Besant, R.; Rezkallah, K. A Mathematical Model for Predicting the Densification and Growth of Frost on a Flat Plate. Int. J. Heat Mass Transf. 1993, 36, 353–363. [Google Scholar] [CrossRef]
- Hayashi, Y.; Aoki, A.; Adachi, S.; Hori, K. Study of Frost Properties Correlating with Frost Formation Types. J. Heat Transf. 1977, 99, 239–245. [Google Scholar] [CrossRef]
- Zhang, T.; O’Neal, D.L.; McClain, S.T. Analysis of frost thickness and roughness growth from the perspective of frost crystal structure. Int. J. Refrig. Rev. Int. Du Froid 2020, 112, 314–323. [Google Scholar] [CrossRef]
- Shirin, N.; Melanie, T.F. Experimental Characterization of Frost Growth on a Horizontal Plate Under Natural Convection. J. Therm. Sci. Eng. Appl. 2019, 11, 011020-1–011020-13. [Google Scholar] [CrossRef]
- Schultz, H.B. Microclimates on Spring Frost Nights in Napa Valley Vlneyards. Am. J. Enol. Vitic. 1961, 12, 81. [Google Scholar]
- Perry, K. Basics of Frost and Freeze Protection for Horticultural Crops. HortTechnology 1998, 8, 10–15. [Google Scholar] [CrossRef] [Green Version]
- Ambroise, V.; Legay, S.; Guerriero, G.; Hausman, J.F.; Cuypers, A.; Sergeant, K. The Roots of Plant Frost Hardiness and Tolerance. Plant Cell Physiol. 2019, 61, 3–20. [Google Scholar] [CrossRef] [Green Version]
- Suzuki, S.; Arai, T. Does frost really bring injury to plants? J. Agric. Meteorol. 1952, 7, 127–130. [Google Scholar] [CrossRef]
- Richards, K. Observation and simulation of dew in rural and urban environments. Prog. Phys. Geogr. Earth Environ. 2004, 28, 76–94. [Google Scholar] [CrossRef]
- Malinovic, S.; Stanojevic, G.; Radovanovic, M.M. Recent changes in first and last frost dates and frost-free period in Serbia. Geogr. Ann. Ser. A Phys. Geogr. 2018, 100, 44–58. [Google Scholar] [CrossRef]
- Dominguez-Castro, F.; Gallego, M.C.; Vaquero, J.M.; Herrera, R.G.; Pea-Gallardo, M.; El Kenawy, A.; Vicente-Serrano, S.M. Twelve Years of Daily Weather Descriptions in North America in the Eighteenth Century (Mexico City, 1775–1786). Bull. Am. Meteorol. Soc. 2019, 100, 1531–1547. [Google Scholar] [CrossRef] [Green Version]
- Fan, J.; Zhang, M.; Cao, G.; Zhang, X.; Liu, C.; Niu, X.; Xu, W. Frost Monitoring of Fruit Tree with Satellite Data. In Remote Sensing for Agriculture, Ecosystems, and Hydrology XIV; International Society for Optics and Photonics: Bellingham, WA, USA, 2012. [Google Scholar]
- Szalay, L.; Gyrgy, Z.; Tth, M. Frost hardiness of apple (Malus X domestica) flowers in different phenological phases. Sci. Hortic. 2019, 253, 309–315. [Google Scholar] [CrossRef]
- Atam, E.; Hong, S.-W.; Arteconi, A. Thermofluid Modelling of Large-Scale Orchards for Optimal Design and Control of Active Frost Prevention Systems. Energies 2020, 13, 378. [Google Scholar] [CrossRef] [Green Version]
- Pakkish, Z.; Tabatabaienia, M. The use and mechanism of NO to prevent frost damage to flower of apricot. Sci. Hortic. 2016, 198, 318–325. [Google Scholar] [CrossRef]
- Wu, X.; Dai, W.; Xu, W.; Tang, L. Mesoscale investigation of frost formation on a cold surface. Exp. Therm. Fluid Sci. 2007, 31, 1043–1048. [Google Scholar] [CrossRef]
- O’Neal, D.; Tree, D.R. A review of frost formation in simple geometries. ASHRAE Trans. 1985, 91, 267–281. [Google Scholar]
- Leoni, A.; Mondot, M.; Durier, F.; Revellin, R.; Haberschill, P. Frost formation and development on flat plate: Experimental investigation and comparison to predictive methods. Exp. Therm. Fluid Sci. 2017, 88, 220–233. [Google Scholar] [CrossRef]
- Huang, L.; Liu, Z.; Liu, Y.; Gou, Y. Experimental study of frost growth on a horizontal cold surface under forced convection. J. Mech. Sci. Technol. 2010, 24, 1523–1529. [Google Scholar] [CrossRef]
- Östin, R.; Andersson, S. Frost Growth Parameters in a Forced Air Stream. Int. J. Heat Mass Transf. 1991, 34, 1009–1017. [Google Scholar] [CrossRef]
- O’Neal, D.; Tree, D.R. Measurement of frost growth and density in a parallel plate geometry. ASHRAE Trans. 1984, 90, 278–290. [Google Scholar]
- Lee, K.S.; Kim, W.-S.; Lee, T.-H. A One-Dimensional Model for Frost Formation on a Cold Flat Surface. Int. J. Heat Mass Transf. 1997, 40, 4359–4365. [Google Scholar] [CrossRef]
- Cheng, C.H.; Shiu, C.-C. Frost formation and frost crystal growth on a cold plate in atmospheric air flow. Int. J. Heat Mass Transf. 2002, 45, 4289–4303. [Google Scholar] [CrossRef]
- Lu, Y.; Hu, Y.; Snyder, R.L.; Kent, E.R. Tea leaf’s microstructure and ultrastructure response to low temperature in indicating critical damage temperature. Inf. Process. Agric. 2019, 6, 247–254. [Google Scholar] [CrossRef]
- Schwartze, J.P.; Brocker, S. The evaporation of water into air of different humidities and the inversion temperature phenomenon. Int. J. Heat Mass Transf. 2000, 43, 1791–1800. [Google Scholar] [CrossRef]
- Yu, L.P.; Wang, C.; Wang, Z.H. Quantitative Evaluation Model of Frost Disaster in Early Spring Tea in Zhejiang Province. Meteorol. Environ. Sci. 2017, 40, 44–48. (In Chinese) [Google Scholar]
- Jian, Y. The advance in frost injury research of fruit trees. J. Agric. Univ. Hebei 2000, 23, 54–58. [Google Scholar]
- He, S.; Zhang, Y.; Yang, W. Fabrication and Frosting Properties Study of Surface-Active Agents Coating Based on Nanoporous Aluminum Substrate. Energies 2018, 11, 2797. [Google Scholar] [CrossRef] [Green Version]
- Esmeryan, K.D.; Castano, C.E.; Mohammadi, R.; Lazarov, Y.; Radeva, E.I. Delayed condensation and frost formation on superhydrophobic carbon soot coatings by controlling the presence of hydrophilic active sites. J. Phys. D Appl. Phys. 2018, 51, 055302. [Google Scholar] [CrossRef]
- Yao, Y.; Jiang, Y.; Deng, S.; Ma, Z. A study on the performance of the airside heat exchanger under frosting in an air source heat pump water heater/chiller unit. Int. J. Heat Mass Transf. 2004, 47, 3745–3756. [Google Scholar] [CrossRef]
- Boreyko, J.B.; Collier, C.P. Delayed frost growth on jumping-drop superhydrophobic surfaces. ACS Nano 2013, 7, 1618–1627. [Google Scholar] [CrossRef]
- Wei, C.; Jin, B.; Zhang, Q.; Zhan, X.; Chen, F. Anti-icing performance of super-wetting surfaces from icing-resistance to ice-phobic aspects: Robust hydrophobic or slippery surfaces. J. Alloy. Compd. 2018, 765, 721–730. [Google Scholar] [CrossRef]
- Chen, T.; Yan, W.; Hongtao, L.; Zhu, W.; Guo, K.; Li, J. Facile preparation of superamphiphobic phosphate-Cu coating on iron substrate with mechanical stability, anti-frosting properties, and corrosion resistance. J. Mater. Sci. 2017, 52, 4675–4688. [Google Scholar] [CrossRef]
- Lee, J.; Jeong, H.; Kim, D.R.; Lee, K.-S. Frost layer growth behavior under cryogenic conditions. Appl. Therm. Eng. 2019, 163, 114333. [Google Scholar] [CrossRef]
- Gong, J.; Hou, J.; Li, G.; Gao, T.; Sun, J. A lattice Boltzmann study of frost growth on a cold surface. Int. Commun. Heat Mass Transf. 2018, 98, 116–124. [Google Scholar] [CrossRef]
- Liping, X.; Xianmin, G.; Zhen, X. Experimental Study of Frost Growth Characteristics on Surface of Fin-tube Heat Exchanger. Energy Procedia 2017, 105, 5114–5121. [Google Scholar] [CrossRef]
- Lee, J.; Kim, J.; Kim, D.R.; Lee, K.-S. Modeling of frost layer growth considering frost porosity. Int. J. Heat Mass Transf. 2018, 126, 980–988. [Google Scholar] [CrossRef]
- Song, M.; Dang, C. Review on the measurement and calculation of frost characteristics. Int. J. Heat Mass Transf. 2018, 124, 586–614. [Google Scholar] [CrossRef]
- Lu, Y.Z.; Hu, Y.G.; Tian, J.T.; Song, H.; Snyder, R.L. Artificial Radiation Frost Chamber for Frost Formation on Tea. Appl. Sci. 2019, 9, 4726. [Google Scholar] [CrossRef] [Green Version]
- Kotikot, S.M.; Flores, A.; Griffin, R.E.; Irwin, D.E. Statistical characterization of frost zones: Case of tea freeze damage in the Kenyan highlands. Int. J. Appl. Earth Obs. Geoinf. 2020, 84, 101971. [Google Scholar] [CrossRef]
- Vieira Junior, N.A.; Caramori, P.H.; de Aguiar e Silva, M.A.; Nitsche, P.R. Minimum temperature differences between the meteorological screen and grass in radiative frost nights. Semin. Cienc. Agrar. 2018, 38, 2337–2349. [Google Scholar] [CrossRef]
- Unterberger, C.; Brunner, L.; Nabernegg, S. Spring frost risk for regional apple production under a warmer climate. PLoS ONE 2018, 13, e0200201. [Google Scholar] [CrossRef]
- Kiktev, D.; Astakhova, E.; Zaripov, R.; Murav’ev, A.; Smirnov, A.; Tsyrulnikov, M. FROST-2014 Project and Meteorological Support of the Sochi-2014 Olympics. Russ. Meteorol. Hydrol. 2015, 40, 504–512. [Google Scholar] [CrossRef]
- Tomczyk, A.M.; Szyga-Pluta, K.; Bednorz, E. Occurrence and synoptic background of strong and very strong frost in spring and autumn in Central Europe. Int. J. Biometeorol. 2020, 64, 59–70. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shin, J.; Tikhonov, A.V.; Kim, C. Experimental study on frost structure on surfaces with different hydrophilicity: Density and thermal conductivity. J. Heat Transf. Trans. Asme 2003, 125, 84–94. [Google Scholar] [CrossRef]
- Lu, Y.Z.; Hu, Y.G.; Li, P.P.; Paw, U.K.T.; Snyder, R.L. Prediction of Radiation Frost Using Support Vector Machines Based on Micrometeorological Data. Appl. Sci. 2020, 10, 283. [Google Scholar] [CrossRef] [Green Version]
- Yan, H.; Zhang, C.; Coenders-Gerrits, M.; Acquah, S.; Zhang, H.; Wu, H.; Zhao, B.; Huang, S.; Fu, H. Parametrization of aerodynamic and canopy resistances for modeling evapotranspiration of greenhouse cucumber. Agric. For. Meteorol. 2018, 262, 370–378. [Google Scholar] [CrossRef]
- Ball, J.; Woodrow, I.; Berry, J. A Model Predicting Stomatal Conductance and Its Contribution to the Control of Photosynthesis Under Different Environmental Conditions. Prog. Photosynth. Res. 1987, 4, 221–224. [Google Scholar] [CrossRef]
- Salisbury, J.W.; Aria, D.M.; Wald, A. Measurements of thermal infrared spectral reflectance of frost, snow, and ice. J. Geophys. Res. Solid Earth 1994, 99, 24235–24240. [Google Scholar] [CrossRef]
- Hu, Y. Mechanism and Control Technology of Late Frost for Tea Plant through Air Disturbance. Ph.D. Thesis, Jiangsu University, Zhenjiang, China, 2011. (In Chinese). [Google Scholar]
- Goswami, J.; Sharma, V.; Choudhury, B.; Raju, P. Rapid identification of abiotic stress (frost) in in-filed maize crop using UAV. Int. Arch. Photogramm. Remote. Sens. Spat. Inf. Sci. 2019, XLII-3/W6, 467–471. [Google Scholar] [CrossRef] [Green Version]
- Nuttall, J.G.; Perry, E.M.; O’Leary, G.J.; Barlow, K.M.; Wallace, A.J. Frost response in wheat and early detection using proximal sensors. J. Agron. Crop. Sci. 2019, 205, 220–234. [Google Scholar] [CrossRef] [Green Version]
- Zhu, L.; Cao, Z.; Zhuo, W.; Yan, R.; Ma, S. A New Dew and Frost Detection Sensor Based on Computer Vision. J. Atmos. Ocean. Technol. 2014, 31, 2692–2712. [Google Scholar] [CrossRef]
- Janssen, D.; Mohs, B.; Kulacki, F. Frost Layer Growth Based on High Resolution Image Analysis. J. Therm. Sci. Eng. Appl. 2016, 8, 021018. [Google Scholar] [CrossRef]
- Zhu, L.; Cao, Z.; Zhuo, W.; Yan, R. A Method of Frost Observation Based on Intensity Changing Regularity Simulation and Texture Analysis. In Mippr 2011: Pattern Recognition and Computer Vision; Roberts, J., Ma, J., Eds.; SPIE: Bellingham, WA, USA, 2011; Volume 8004. [Google Scholar]
- Wang, W.; Guo, Q.C.; Lu, W.P.; Feng, Y.C.; Na, W. A generalized simple model for predicting frost growth on cold flat plate. Int. J. Refrig. 2012, 35, 475–486. [Google Scholar] [CrossRef]
- Mu, P.P.; Zhang, S.Y.; Zhang, Y.; Ye, X.Z.; Pan, X. Image-based 3D model retrieval using manifold learning. Front. Inf. Technol. Electron. Eng. 2018, 19, 1397–1408. [Google Scholar] [CrossRef]
- Zhou, Z.; Wu, J.; Zhu, L. Dew image classification based on multi-path feature fusion and deep learning. Comput. Appl. Softw. 2008, 35, 205–210. (In Chinese) [Google Scholar]
- Zhang, L.H.; Zhang, J.; Li, H.-W.; Hu, Q. The research of optical fiber frost sensor and intelligent refrigerator defrost system. In Proceedings of the 2012 IEEE 11th International Conference on Signal Processing, Beijing, China, 21–25 October 2012; p. 2199. [Google Scholar]
- Wang, W.; Zhang, F.; Xiao, J.; Zhao, Y. Feasibility study of photoelectric coupling on-line frost detection technology. J. Appl. Found. Eng. Sci. 2010, 18, 299–303. (In Chinese) [Google Scholar]
- Xiao, J.; Wang, W.; Guo, Q.C.; Zhao, Y.H. An experimental study of the correlation for predicting the frost height in applying the photoelectric technology. Int. J. Refrig. Rev. Int. Du Froud 2010, 33, 1006–1014. [Google Scholar] [CrossRef]
- Wu, X.; Dai, W.; Wang, W. Interface evolution and mechanism analysis of frost crystal growth. J. Tsinghua Univ. 2007, 8, 1352–1355. [Google Scholar]
- Dong, J.; Wang, W.; Dong, Z. Real-time measurement for evaporator frosting rate. Laser Technol. 2000, 24, 179–181. [Google Scholar]
- Wiltshire, B.; Mir, S.K.; Golovkin, K.; Zarifi, M.H. Robust and sensitive frost and ice detection via planar microwave resonator sensor. Sens. Actuators B Chem. 2019, 301, 126881. [Google Scholar] [CrossRef]
- Chan, H.J.; Dong, H.S.; Vina, K.K.; Jeffrey, S.A.; Chang, K.C. Quantitative measurements of nanoscale thin frost layers using surface plasmon resonance imaging. Int. J. Heat Mass Transf. 2018, 124, 83–89. [Google Scholar] [CrossRef]
- Zheng, L.; Wang, Z.; Sun, H.; Zhang, M.; Li, M. Real-time evaluation of corn leaf water content based on the electrical property of leaf. Comput. Electron. Agric. 2015, 112, 102–109. [Google Scholar] [CrossRef]
- Lu, Y.; Hu, Y.; Li, P. Consistency of electrical and physiological properties of tea leaves on indicating critical cold temperature. Biosyst. Eng. 2017, 159, 89–96. [Google Scholar] [CrossRef]
- Gemma, H.; Jorge, E.G.; Ernesto, S.F. A novel low-cost smart leaf wetness sensor. Comput. Electron. Agric. 2017, 143, 286–292. [Google Scholar] [CrossRef] [Green Version]
- Grant, G.; Scott, L.; Roy, R.; Jennifer, B.; Andrew, G. A Combined Sensor Method for Detecting Frost Formation. Am. Meteorol. Soc. 2010, 11, 16–21. [Google Scholar]
- Kimura, K.; Yasutake, D.; Nakazono, K.; Kitano, M. Dynamic distribution of thermal effects of an oscillating frost protective fan in a tea field. Biosyst. Eng. 2017, 164, 98–109. [Google Scholar] [CrossRef]
- Sahin, A.Z. An experimental study on the initiation and growth of frost formation on a horizontal plate. Exp. Heat Transf. 1994, 7, 101–119. [Google Scholar] [CrossRef]
- Yonko, J.D.; Sepsy, C.F. An investigation of the thermal conductivity of frost on a flat plate. ASHRAE Trans. 1967, 73, 12–16. [Google Scholar]
- Mao, Y.; Besant, R.W.; Rezkallah, K.S. Measurement and correlations of frost properties with airflow over a flat plate. ASHRAE Trans. 1992, 98, 65–77. [Google Scholar]
- Yu, W.P. Experimental Study and Theory Analyses on Frost Formation. Ph.D. Dissertation, Southeast University, Dhaka, Bangladesh, 2006. (In Chinese). [Google Scholar]
- Christian, J.H.; Robson, O.P.; Barbosa, J.R. A study of frost growth and densification on flat surfaces. Exp. Therm. Fluid Sci. 2009, 33, 371–379. [Google Scholar] [CrossRef]
- Biguria, G.; Wenzel, L.A. Measurement and Correlation of Water Frost Thermal Conductivity and Density. Ind. Eng. Chem. Fundam. 1970, 9, 129–138. [Google Scholar] [CrossRef]
- Amne, E.C.; Anthony, J. A mathematical model for frost growth and densification on flat surfaces. Int. J. Heat Mass Transf. 2014, 77, 604–611. [Google Scholar] [CrossRef]
- Machielsen, C.H.M.; Kerschbaumer, H.G. Influence of frost formation and defrosting on the performance of air coolers: Standards and dimensionless coefficients for the system designer. Int. J. Refrig. 1989, 12, 283–290. [Google Scholar] [CrossRef]
- Brian, P.L.T.; Reid, R.C.; Shah, Y.T. Frost Deposition on Cold Surfaces. Ind. Eng. Chem. Fundam. 1970, 9, 375–380. [Google Scholar] [CrossRef]
- Cai, L.; Hou, P.; Li, S.; Yu, W. Theoretical Model of Frost Layer’s Thermal Conductivity at Different Porosity. Build. Energy Environ. 2005, 24, 62–64. [Google Scholar]
- Sengupta, S.; Sherif, S.A.; Wong, K.V. Empirical heat transfer and frost thickness correlations during frost deposition on a cylinder in cross-flow in the transient regime. Int. J. Energy Res. 1998, 22, 615–624. [Google Scholar] [CrossRef]
- Cremers, J.C.; Mehra, V.K. Frost formation in vertical cylinders in free convection. Am. Soc. Mech. Eng. 1980, 104, 3–7. [Google Scholar] [CrossRef]
- Hacıefendioğlu, K.; Başağa, H.B.; Mohammad, Z.Y.; Karimi, T. Intelligent ice detection on wind turbine blades using semantic segmentation and class activation map approaches based on deep learning method. Renew. Energy 2022, 182, 1–16. [Google Scholar] [CrossRef]
- Poornam, S.; Francis, S.D.A. Image based Plant leaf disease detection using Deep learning. Int. J. Comput. Commun. Inf. 2021, 3, 53–65. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frost Severities | Evaluation Standard | Legend |
|---|---|---|
| III | The minimum temperature on the ground will drop below 0 °C within 48 h, which will have an impact on agriculture, or it has dropped below 0 °C, which will have an impact on agriculture and may continue. |  |
| II | The minimum temperature on the ground will drop below minus 3 °C within 24 h, which will have a serious impact on agriculture, or it has dropped below minus 3 °C, which will have a serious impact on agriculture and may continue. |  |
| I | The minimum temperature on the ground will drop below minus 5 °C within 24 h, which will have a serious impact on agriculture, or it has dropped below minus 5 °C, which will have a serious impact on agriculture and will continue. |  |
| Method | Method Type | Relevant Parameter | Detection Target | References | |
|---|---|---|---|---|---|
| Contact /Non-Contact | Detection Phase 1 | ||||
| Micrometeorological observation | Non-contact | BF | | Occurrence | Smith [6] |
| Spectral remote sensing | Non-contact | AF | Occurrence | Goswami [61] | |
| Image recognition | Non-contact | DF | Quantity | Shirin [14] | |
| Optical detection | Non-contact | DF | Occurrence & Quantity | Wang [70] | |
| Microwave | Non-contact | AF | Quantity | Wiltshive et al. [74] | |
| SPR2 | Contact | AF | Quantity | Chan [75] | |
| Electrical properties | Contact | DF | Occurrence | Zheng [76] | |
| Capacitance | Contact | BF | Occurrence | Lu [77] | |
| Dielectric property | Contact | DF | Quantity | Campbell [79] | |
| Pyroelectricity | Contact | DF | Occurrence | Kimura [80] | |
| d/RH | Frost Density | References | |||
|---|---|---|---|---|---|
| 0–10 | 50–80% | 1–5 | −20–−5 | Tao [11] | |
| 16–22 | 50–80% | 0.7 | −15–−5 | Christian [85] | |
| 26–31 | 6.5–13.5 | 2.7–12.5 | −96–−29 | Biguria [86] | |
| −10–26 | 0.2–2 | 1–4 | −20.5–−11 | Mao [83] | |
| 7–18 | 60–74% | 1.1 | −10–−15 | Amne [87] | |
| −8–19 | 42–80% | 5 | −16–−8 | Wang [68] |
| Reference | Research Method | Thermal Conductivity Result |
|---|---|---|
| J.D. Yonko [82] | Experimental data fitting | |
| C.T. Sander [88] | Experimental data fitting | |
| P.L.T. Brain [89] | Experimental data fitting | |
| Brailsford | Parallel model | |
| Brailsford | Series model | |
| Brailsford | Mixed model | |
| Yonko and Sepsy | Ice hockey–lattice model | |
| Cai L [90] | Porous media–icicle composite model |
| No. | Type | Equations | References |
|---|---|---|---|
| Sengupta et al. [91] | |||
| — | Zhang et al. [68] | ||
| Shin et al. [55] | |||
| — | Wang et al. [70] | ||
| — | Lee et al. [9] | ||
| Cremers et al. [92] | |||
| — | Yang et al. [69] | ||
| Cai et al. [90] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, H.; Hu, Y.; Lu, Y.; Wang, J.; Pan, Q.; Li, P. A Review of Methods and Techniques for Detecting Frost on Plant Surfaces. Agriculture 2021, 11, 1142. https://doi.org/10.3390/agriculture11111142
Song H, Hu Y, Lu Y, Wang J, Pan Q, Li P. A Review of Methods and Techniques for Detecting Frost on Plant Surfaces. Agriculture. 2021; 11(11):1142. https://doi.org/10.3390/agriculture11111142
Chicago/Turabian StyleSong, Huan, Yongguang Hu, Yongzong Lu, Jizhang Wang, Qingmin Pan, and Pingping Li. 2021. "A Review of Methods and Techniques for Detecting Frost on Plant Surfaces" Agriculture 11, no. 11: 1142. https://doi.org/10.3390/agriculture11111142