
Research on Truck Lane Management Strategies for Platooning Speed Optimization and Control on Multi-Lane Highways
Abstract
:1. Introduction
2. Truck Platooning Speed Control Based on Multi-Objective Optimization
2.1. Model Construction Based on Model Predictive Control
2.1.1. Improved Cell Transmission Model
2.1.2. Control Cell Analysis
- (1)
- Calculation of platooning position
- (2)
- Single-bottleneck control cell analysis
- 1)
- 2)
- (3)
- Multi-bottleneck control cell analysis
- 1)
- 2)
- 3)
2.2. Optimal Speed Computation Based on Multi-Objective Optimization
2.2.1. Objective Function
- (1)
- Bottleneck metacell traffic flow.
- (2)
- Overall vehicle travel time.
- (3)
- Truck platooning fuel consumption.
2.2.2. Multi-Objective Speed Optimization
3. Analysis of the Lane Control Strategy Based on Truck Platooning Simulation
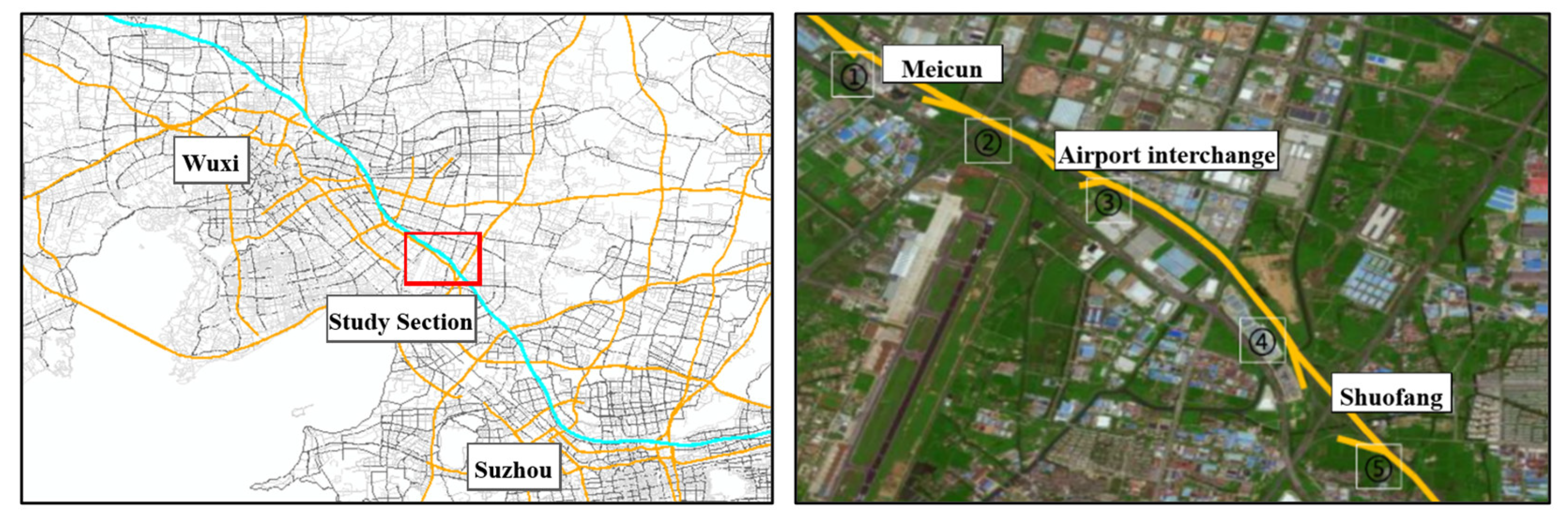
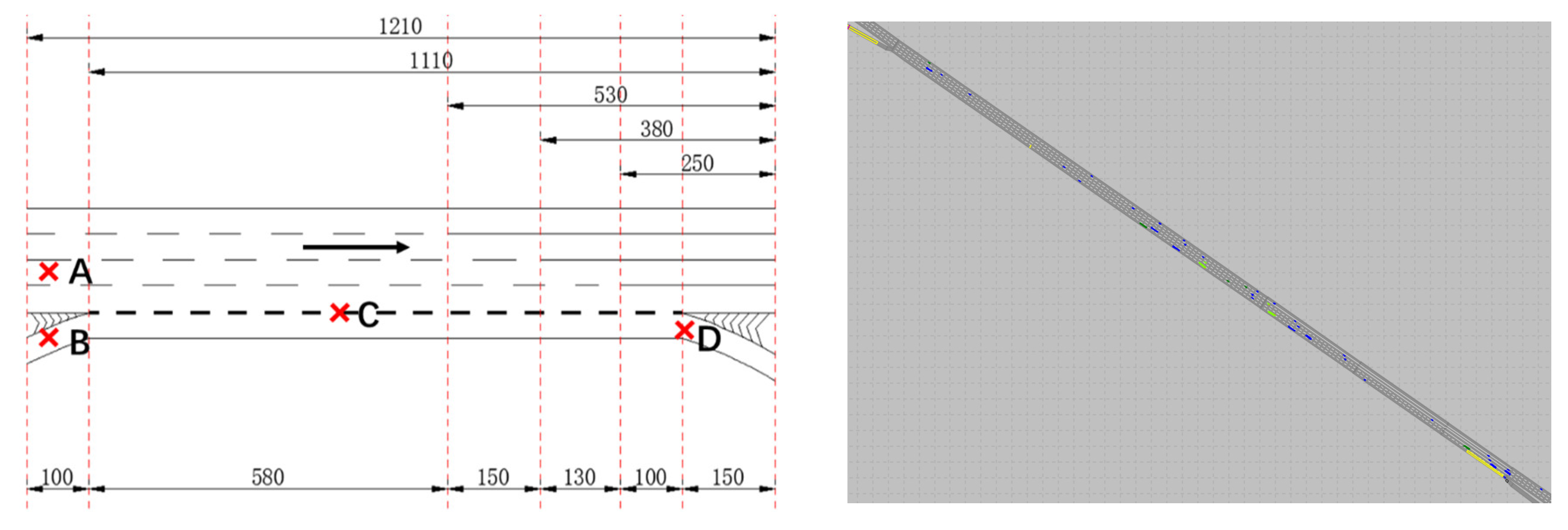
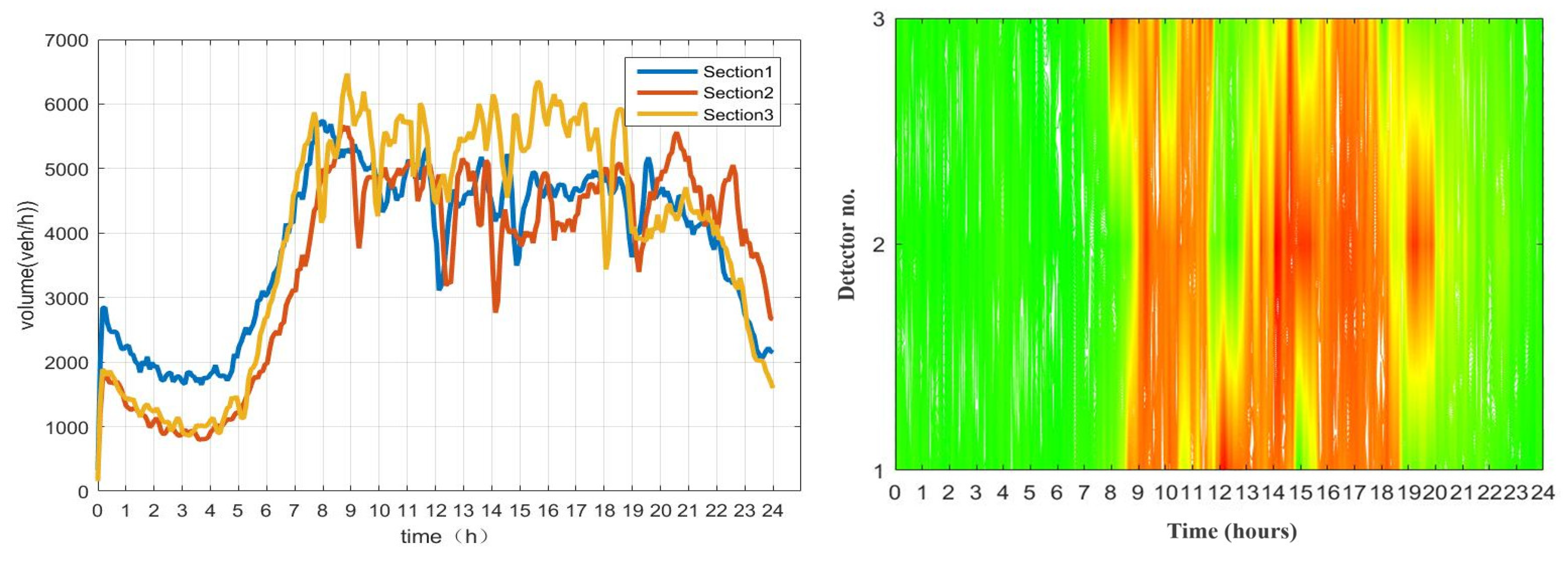
3.1. Simulation Platform Construction
3.1.1. Simulation Platform Construction
3.1.2. Simulation Evaluation Indicators
3.2. Analysis of the Lane Control Strategy
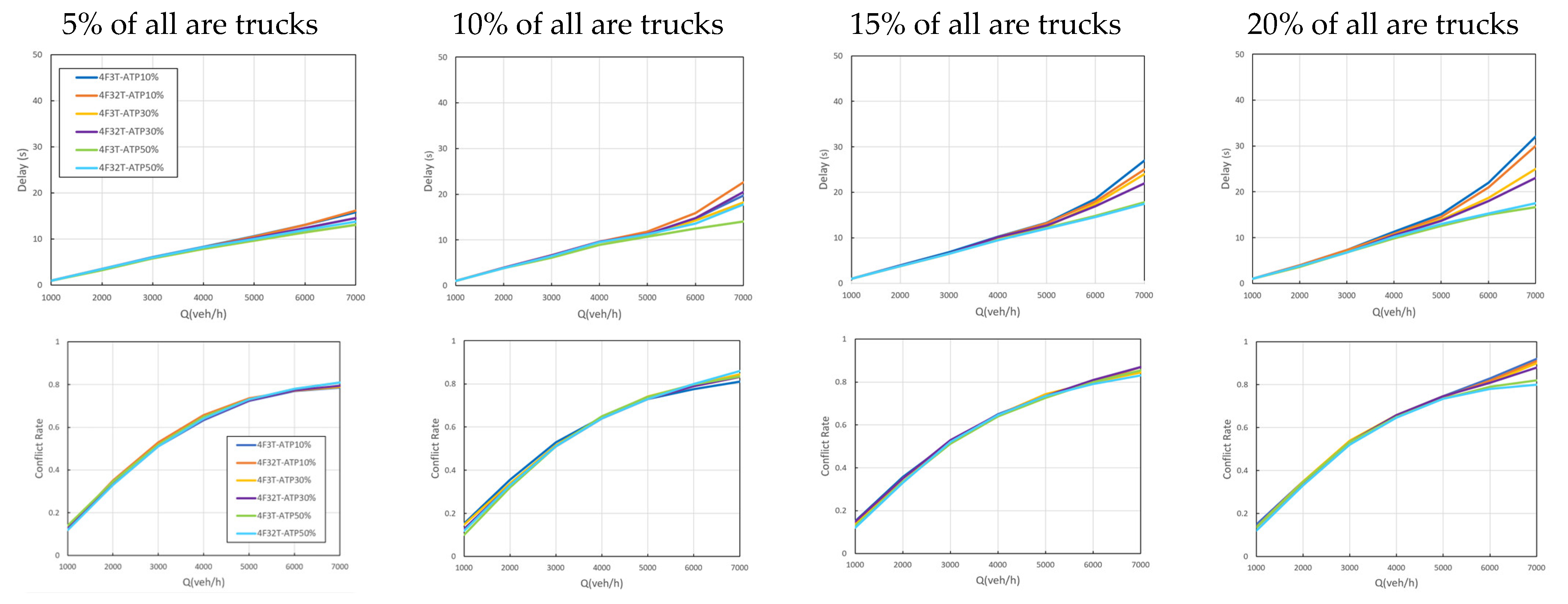
3.2.1. Analysis of Exclusive Lanes for Truck Platooning
- (1)
- Truck platooning in the queue phase through the weaving section
- (2)
- Truck platooning in the separation phase through the weaving section
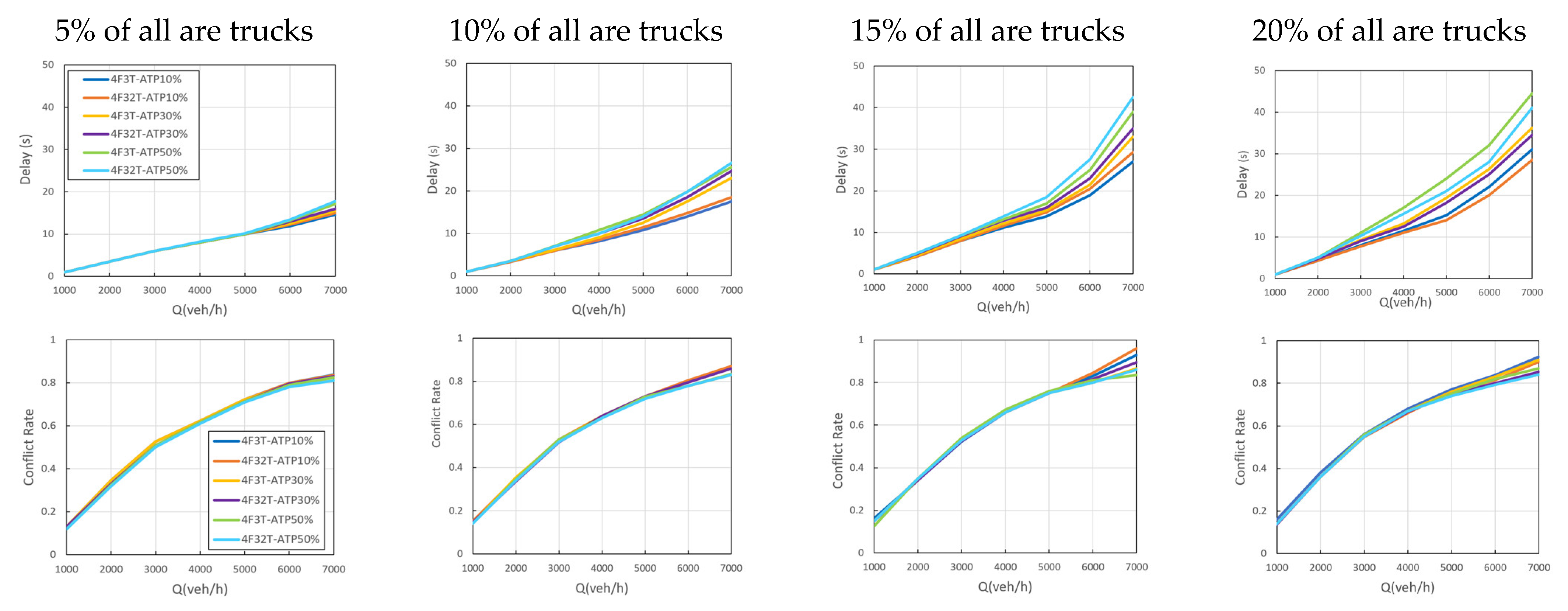
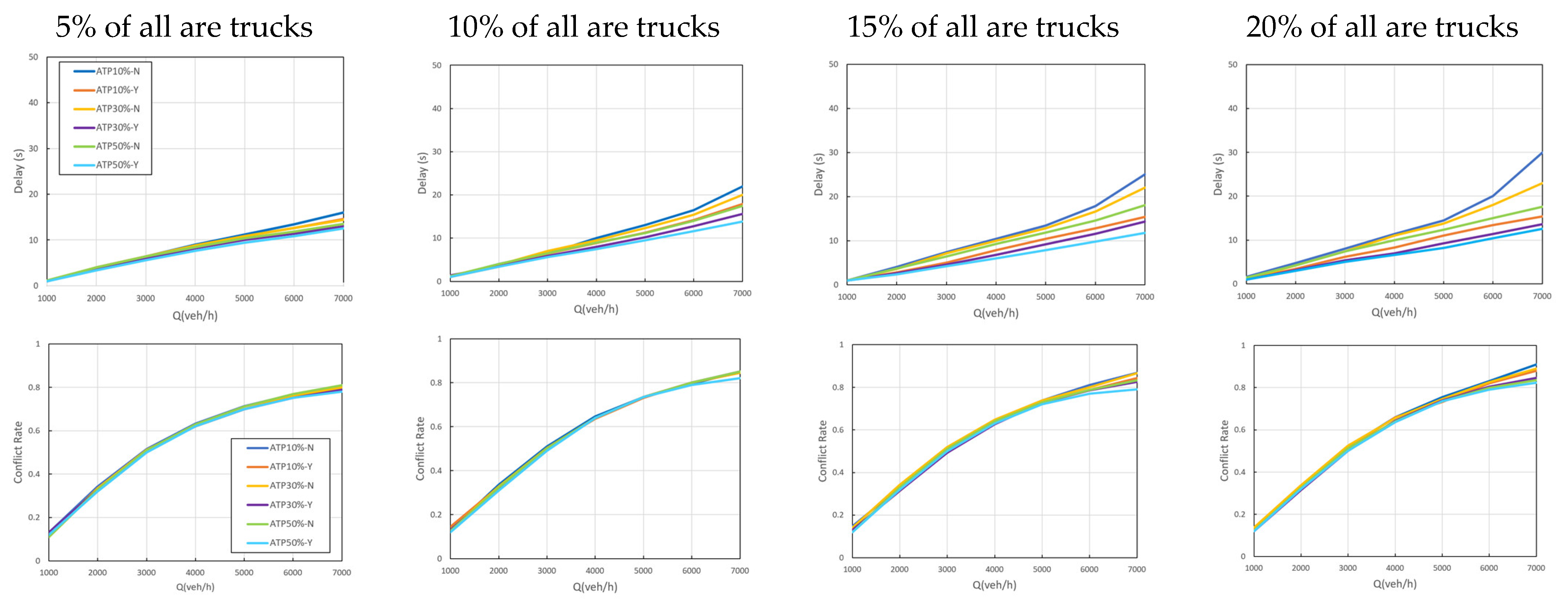
3.2.2. Analysis of the Optimal Speed Control Strategy
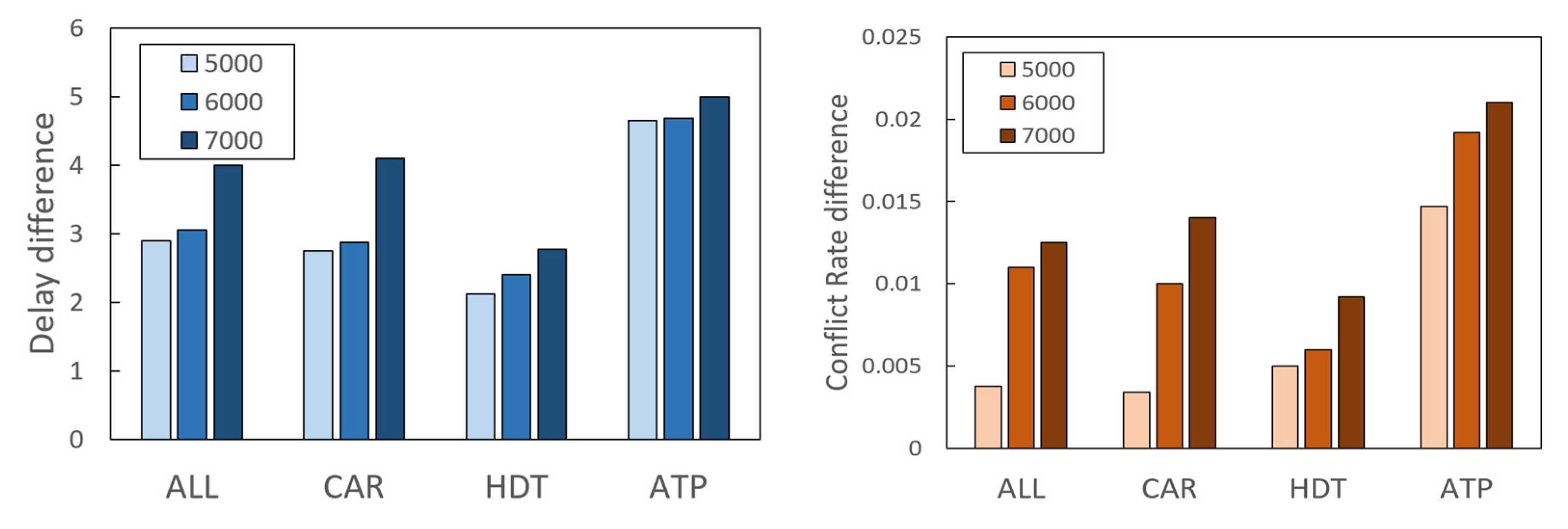
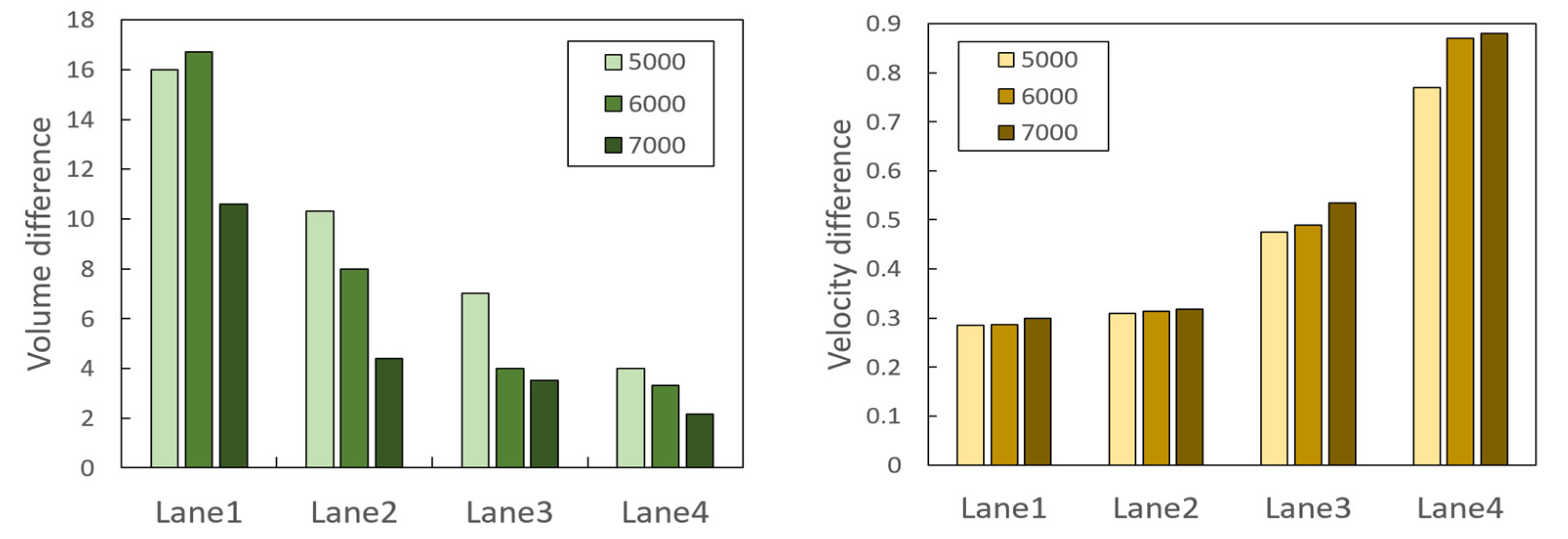
3.2.3. Comparative Analysis by Vehicle and Lane
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bhoopalam, A.K.; Agatz, N.; Zuidwijk, R. Planning of truck platoons: A literature review and directions for future research. Transp. Res. Part B Methodol. 2018, 107, 212–228. [Google Scholar] [CrossRef] [Green Version]
- Zhao, C.; Li, L.; Li, J.; Li, K.; Li, Z. The Impact of Truck Platoons on the Traffic Dynamics Around Off-Ramp Regions. IEEE Access 2021, 9, 57010–57019. [Google Scholar] [CrossRef]
- Rahman, M.S.; Mohamed, A. Longitudinal safety evaluation of connected vehicles’ platooning on expressways. Accid. Anal. Prev. 2018, 117, 381–391. [Google Scholar] [CrossRef] [PubMed]
- Yang, D.; Kuijpers, A.; Dane, G.; van der Sande, T. Impacts of large-scale truck platooning on Dutch highways. Transp. Res. Procedia 2019, 37, 425–432. [Google Scholar] [CrossRef]
- Chen, Z.; Xiong, S.; Chen, Q.; Zhang, Y.; Yu, J.; Jiang, J.; Wu, C. Eco-Driving: A Scientometric and Bibliometric Analysis. IEEE Trans. Intell. Transp. Syst. 2022, 23, 22716–22736. [Google Scholar] [CrossRef]
- Balador, A.; Bazzi, A.; Hernandez-Jayo, U.; de la Iglesia, I.; Ahmadvand, H. A survey on vehicular communication for cooperative truck platooning application. Veh. Commun. 2022, 35, 100460. [Google Scholar] [CrossRef]
- Qu, F.; Wang, F.-Y.; Yang, L. Intelligent transportation spaces: Vehicles, traffic, communications, and beyond. IEEE Commun. Mag. 2010, 48, 136–142. [Google Scholar] [CrossRef]
- Nowakowski, C.; Thompson, D.D.; Shladover, S.E.; Kailas, A.; Lu, X.-Y. Operational Concepts for Truck Maneuvers with Cooperative Adaptive Cruise Control. Transp. Res. Rec. J. Transp. Res. Board 2016, 2559, 57–64. [Google Scholar] [CrossRef]
- Chan, E.; Gilhead, P.; Jelínek, P.; Krej£i, P.; Robinson, T. Cooperative control of SARTRE automated platoon vehicles. In 19th ITS World Congressertico—ITS Europeeuropean Commissionits Americaits Asia-Pacific; ITS Asia Pacific: Vienna, Austria, 2012. [Google Scholar]
- Van Nunen, E.; Kwakkernaat, M.R.J.A.E.; Ploeg, J.; Netten, B.D. Cooperative competition for future mobility. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1018–1025. [Google Scholar] [CrossRef]
- Tsugawa, S. An Overview on an Automated Truck Platoon within the Energy ITS Project. IFAC Proc. Vol. 2013, 46, 41–46. [Google Scholar] [CrossRef]
- ENSEMBLE. ENSEMBLE—The Project. 2020. Available online: https://platooningensemble.eu/project (accessed on 11 February 2021).
- Lesch, V.; Breitbach, M.; Segata, M.; Becker, C.; Kounev, S.; Krupitzer, C. An Overview on Approaches for Coordination of Platoons. IEEE Trans. Intell. Transp. Syst. 2021, 23, 10049–10065. [Google Scholar] [CrossRef]
- Gong, S.; Shen, J.; Du, L. Constrained optimization and distributed computation based car following control of a connected and autonomous vehicle platoon. Transp. Res. Part B Methodol. 2016, 94, 314–334. [Google Scholar] [CrossRef]
- McAuliffe, B.; Lu, X.-Y.; Shladover, S. Influences on Energy Savings of Heavy Trucks Using Cooperative Adaptive Cruise Control. SAE Tech. Pap. 2018, 1, 1181. [Google Scholar] [CrossRef] [Green Version]
- Bouchery, Y.; Hezarkhani, B.; Stauffer, G. Coalition formation and cost sharing for truck platooning. Transp. Res. Part B Methodol. 2022, 165, 15–34. [Google Scholar] [CrossRef]
- Xu, M.; Yan, X.; Yin, Y. Truck routing and platooning optimization considering drivers’ mandatory breaks. Transp. Res. Part C Emerg. Technol. 2022, 143, 103809. [Google Scholar] [CrossRef]
- Duret, A.; Wang, M.; Ladino, A. A hierarchical approach for splitting truck platoons near network discontinuities. Transp. Res. Part B Methodol. 2019, 132, 285–302. [Google Scholar] [CrossRef] [Green Version]
- Piacentini, G.; Pasquale, C.; Sacone, S.; Siri, S.; Ferrara, A. Multiple Moving Bottlenecks for Traffic Control in Freeway Systems; Institute of Electrical and Electronics Engineers Inc.: Naples, Italy, 2019. [Google Scholar]
- Čičić, M.; Pasquale, C.; Siri, S.; Sacone, S.; Johansson, K.H. Platoon-actuated variable area mainstream traffic control for bot-tleneck decongestion. Eur. J. Control 2022, 68, 100687. [Google Scholar] [CrossRef]
- Calvert, S.; Schakel, W.; van Arem, B. Evaluation and modelling of the traffic flow effects of truck platooning. Transp. Res. Part C Emerg. Technol. 2019, 105, 1–22. [Google Scholar] [CrossRef]
- Mahnam, S.; Menendez, M. Analysis of strategies for truck platooning: Hybrid strategy. Transp. Res. Rec. 2016, 254, 41–48. [Google Scholar]
- Törnell, J.; Sebben, S.; Elofsson, P. Experimental investigation of a two-truck platoon considering inter-vehicle distance, lateral offset and yaw. J. Wind. Eng. Ind. Aerodyn. 2021, 213, 104596. [Google Scholar] [CrossRef]
- Siuhi, S.; Mussa, R. Simulation Analysis of Truck-Restricted and High-Occupancy Vehicle Lanes. Transp. Res. Rec. J. Transp. Res. Board 2007, 2012, 127–133. [Google Scholar] [CrossRef]
- Winkler, M.; Fan, W.D. Evaluating impacts on freeway capacity using VISSIM: Accounting for truck lane restrictions, driver behavior, and interchange density. Adv. Transp. Stud. 2011, 25, 15–28. [Google Scholar]
- Al Eisaeia, M.; Moridpourb, S.; Tay, R. Heavy Vehicle Management: Restriction Strategies. Transp. Res. Procedia 2017, 21, 18–28. [Google Scholar] [CrossRef]
- Mahesh, S.; Ramadurai, G.; Nagendra, S.S. On-board measurement of emissions from freight trucks in urban arterials: Effect of operating conditions, emission standards, and truck size. Atmos. Environ. 2019, 212, 75–82. [Google Scholar] [CrossRef]
- Wu, B.; Xuan, K.; Zhang, X.; Wu, Z.; Wang, W.; Shen, X.; Li, X.; Zhang, H.; Cao, X.; Hao, X.; et al. Quantitative of instantaneous BC emissions based on vehicle specific power from real-world driving diesel trucks in China. Sci. Total. Environ. 2022, 819, 153230. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle Type | Minimum Speed | Maximum Speed | Average Speed | 85% Vehicle Speed |
|---|---|---|---|---|
| CAR | 46.6 | 120 | 84.2 | 96.4 |
| HDT | 34.2 | 91.5 | 60.1 | 72 |
| ATP | 36.5 | 94.66 | 65.3 | 77.2 |
| Lane Management Method | Vehicle Type | Lane 1 | Lane 2 | Lane 3 | Lane 4 |
|---|---|---|---|---|---|
| Truck platooning exclusive lane and second lane close to HDT | CAR | √ | √ | √ | × |
| HDT | × | × | √ | × | |
| ATP | × | × | × | √ | |
| Truck platooning exclusive lane under optimal speed control | CAR | √ | √ | √ | × |
| HDT | × | √ | √ | × | |
| ATP | × | × | × | √ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rui, Y.; Wang, S.; Wu, R.; Shen, Z. Research on Truck Lane Management Strategies for Platooning Speed Optimization and Control on Multi-Lane Highways. Appl. Sci. 2023, 13, 4072. https://doi.org/10.3390/app13064072
Rui Y, Wang S, Wu R, Shen Z. Research on Truck Lane Management Strategies for Platooning Speed Optimization and Control on Multi-Lane Highways. Applied Sciences. 2023; 13(6):4072. https://doi.org/10.3390/app13064072
Chicago/Turabian StyleRui, Yikang, Shu Wang, Renfei Wu, and Zhe Shen. 2023. "Research on Truck Lane Management Strategies for Platooning Speed Optimization and Control on Multi-Lane Highways" Applied Sciences 13, no. 6: 4072. https://doi.org/10.3390/app13064072