
Convolutional Neural Network-Based Soil Water Content and Density Prediction Model for Agricultural Land Using Soil Surface Images
Abstract
:1. Introduction
2. Materials and Methods
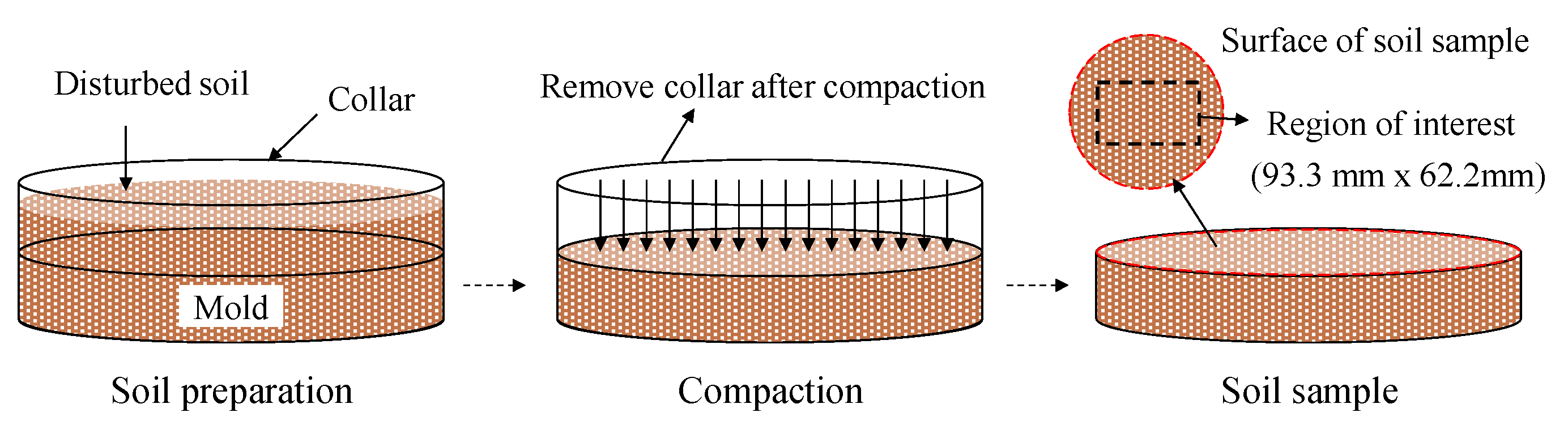
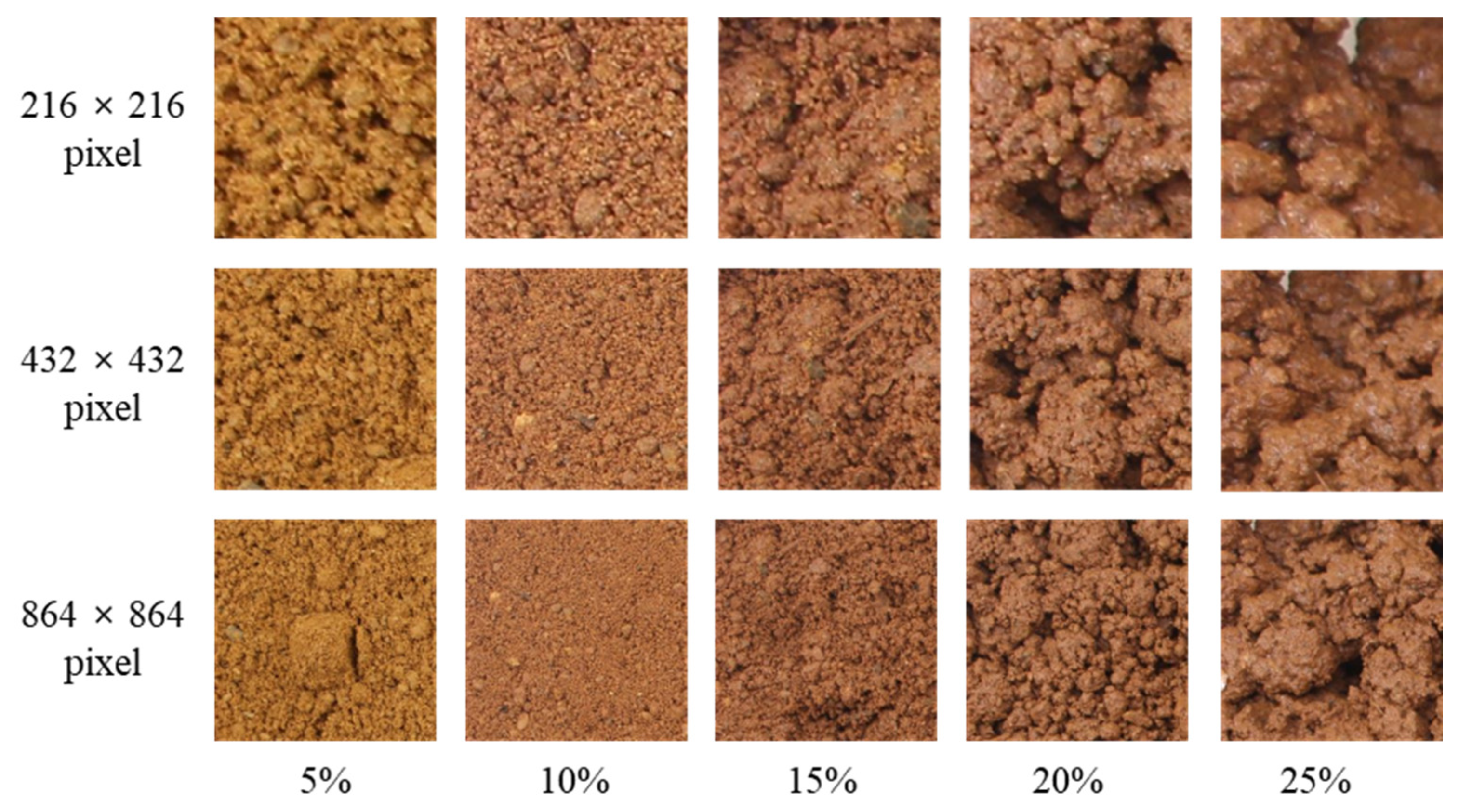
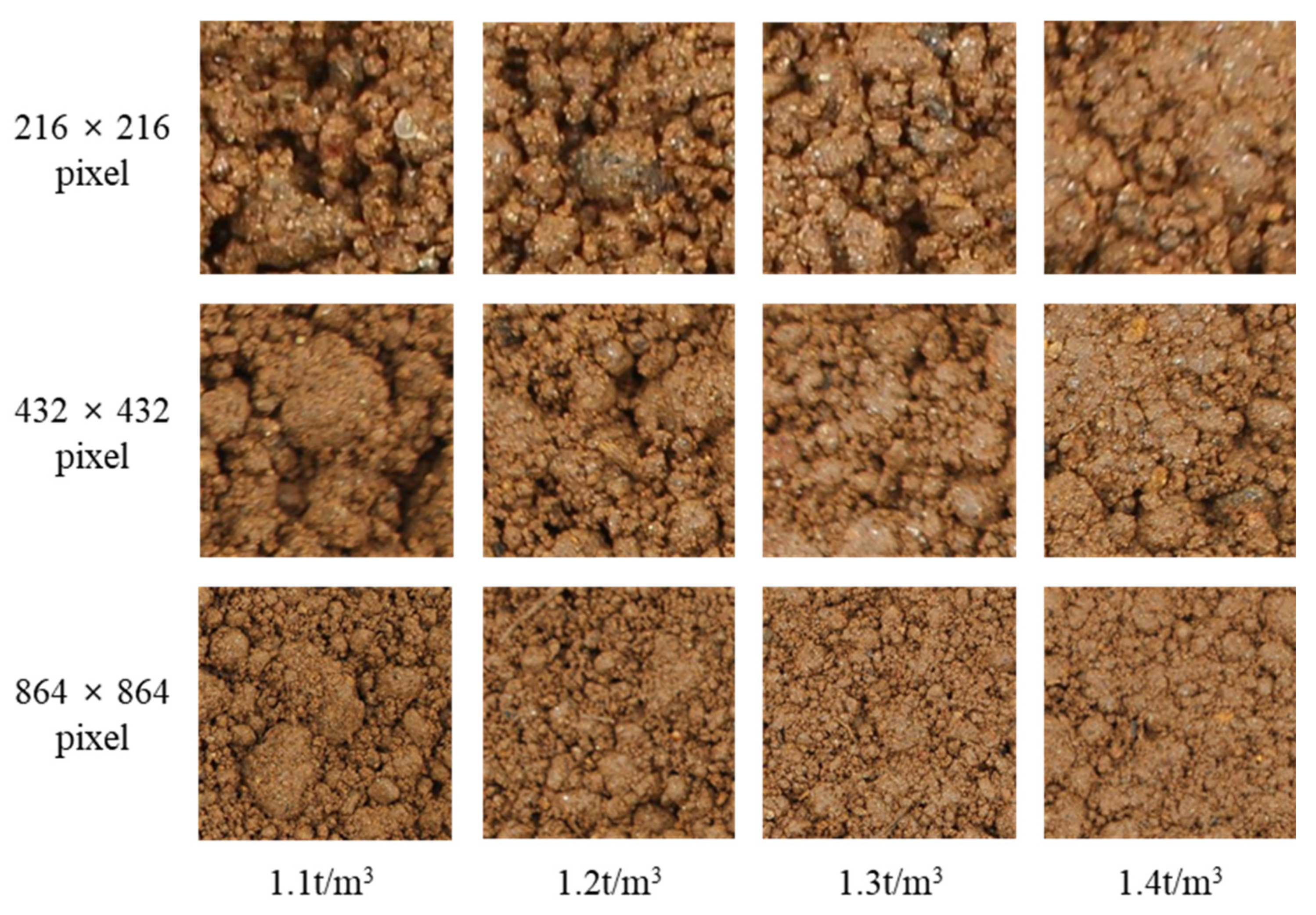
2.1. Soil Surface Image Acquisition
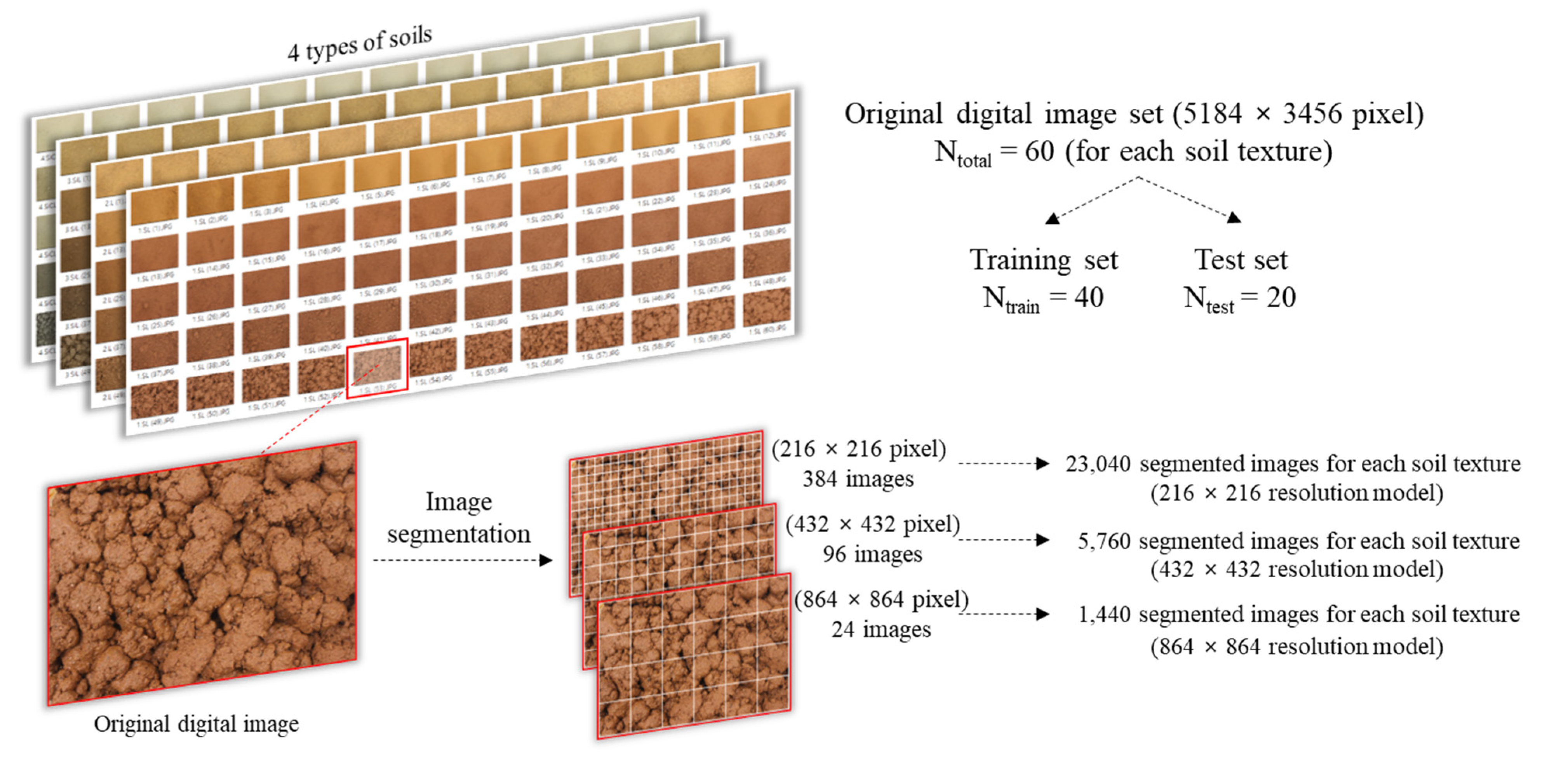
2.2. Data Preparation for the CNN Model
2.3. Convolutional Neural Network
3. Results
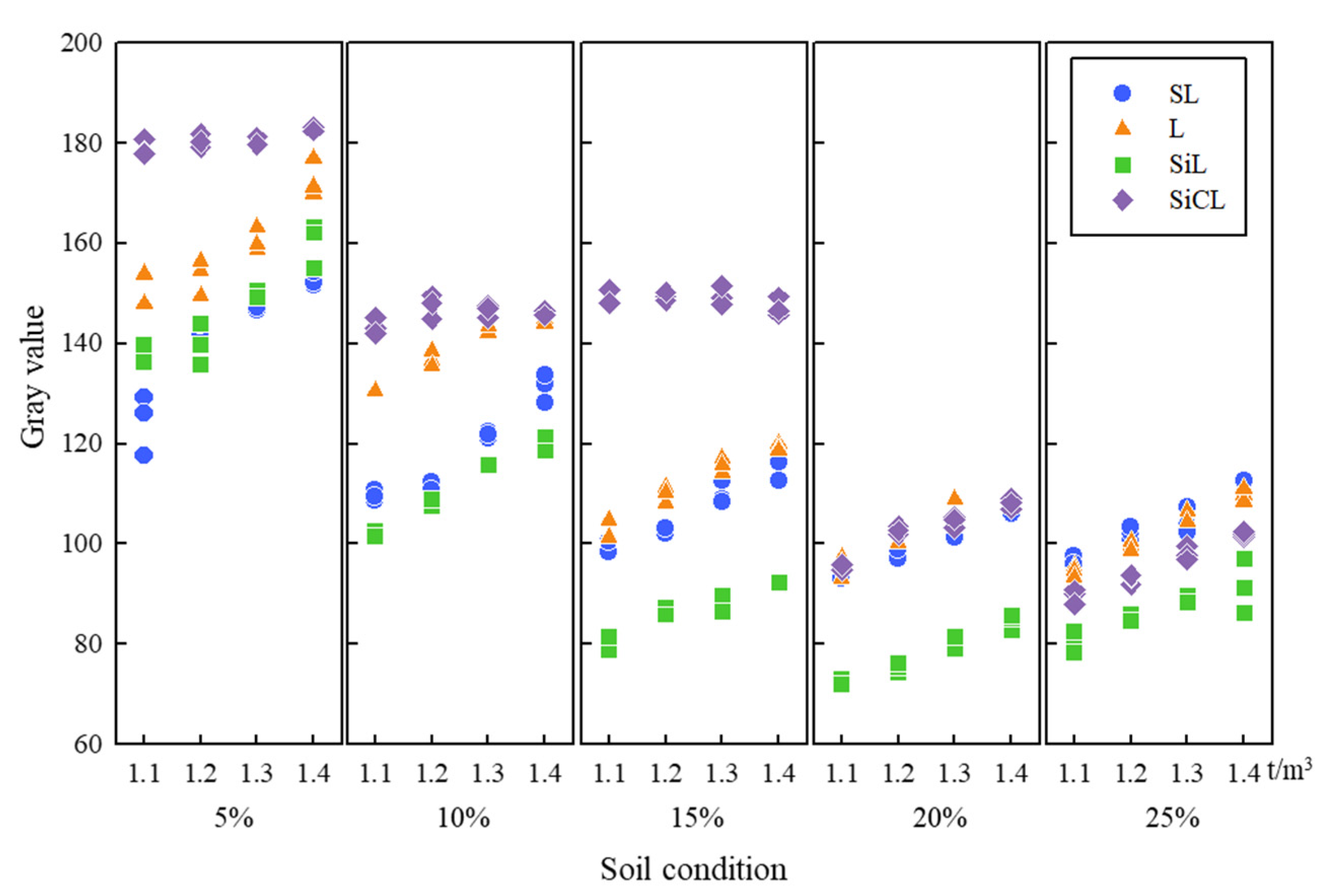
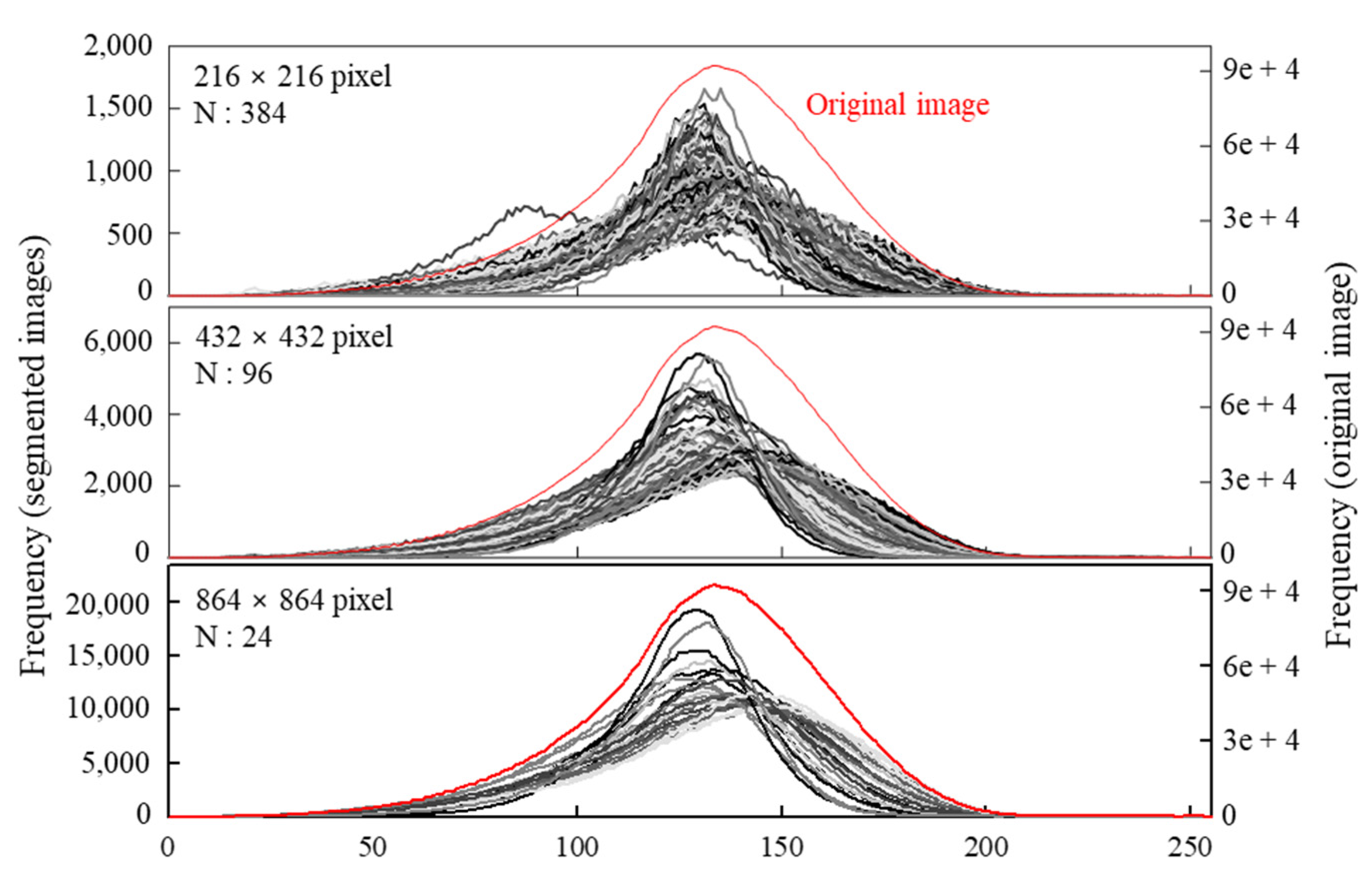
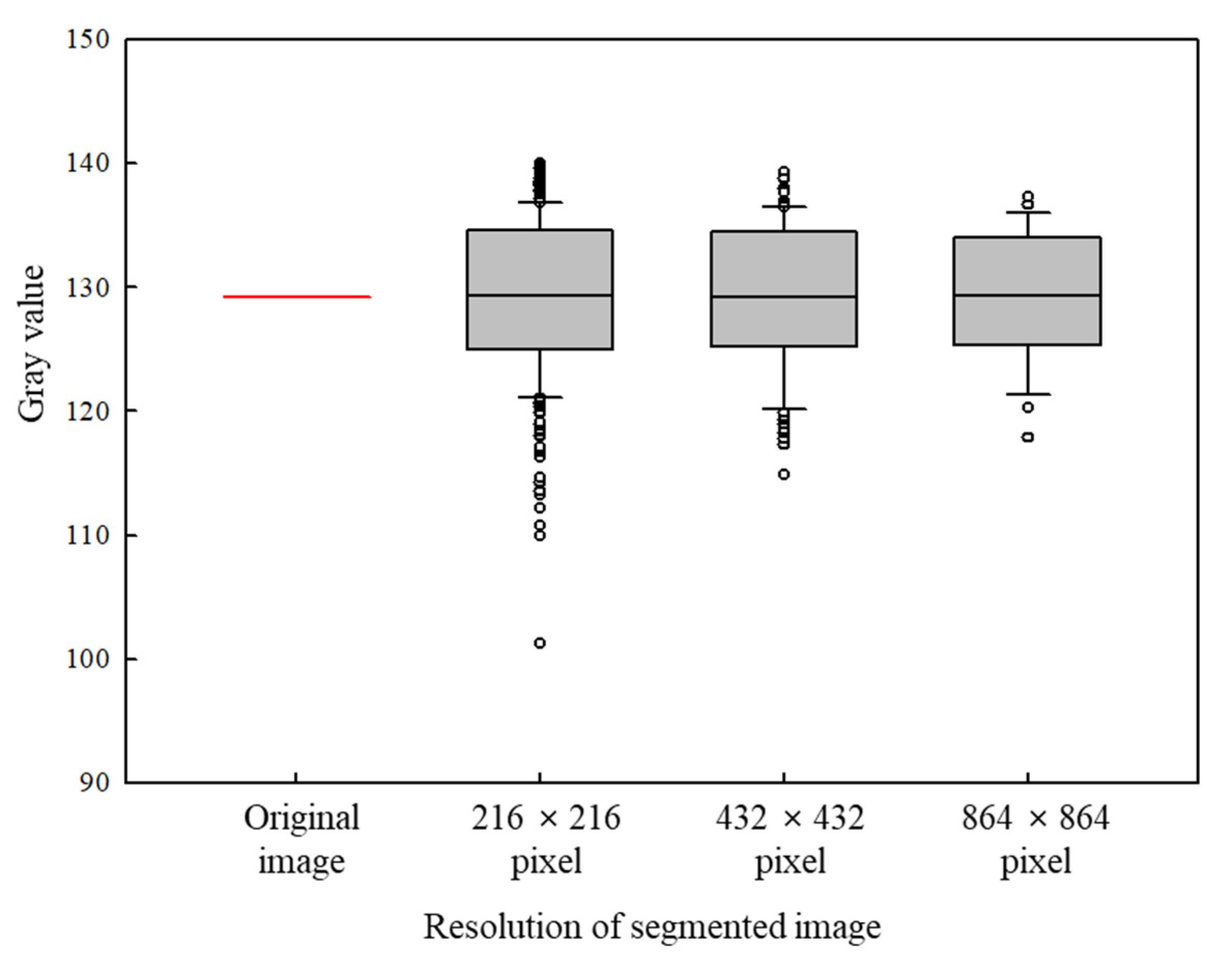
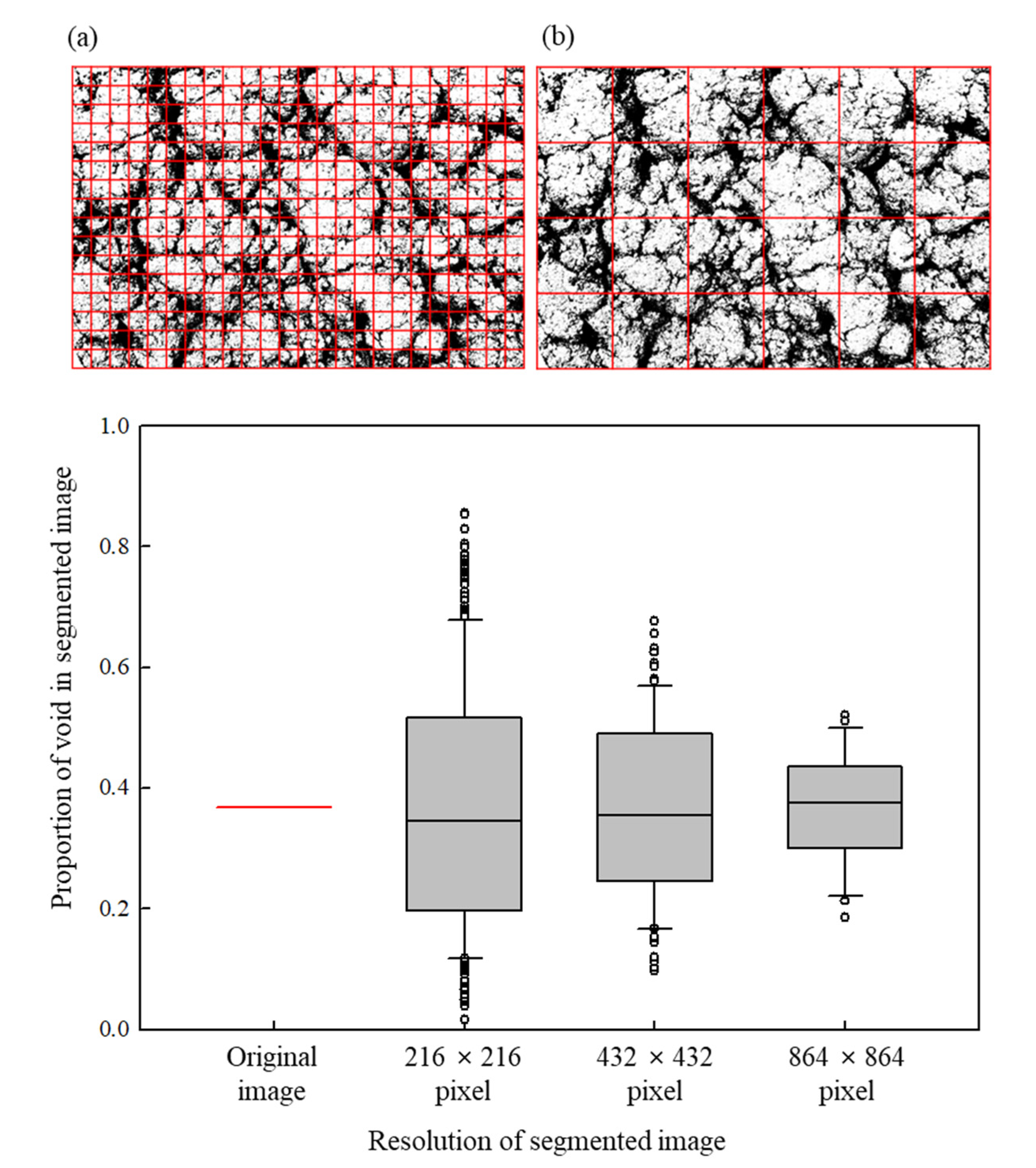
3.1. Quality of Original and Segmented Images
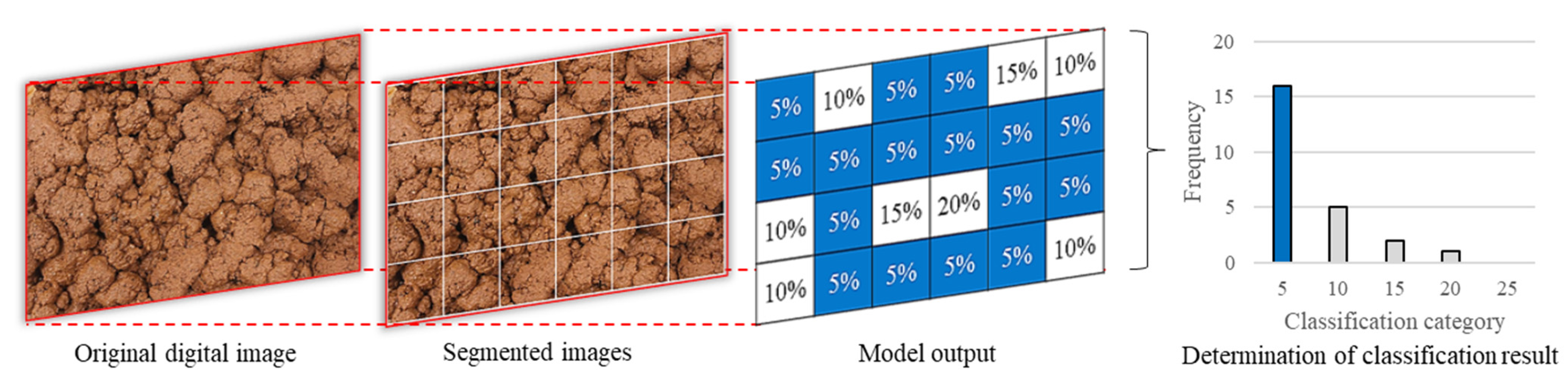
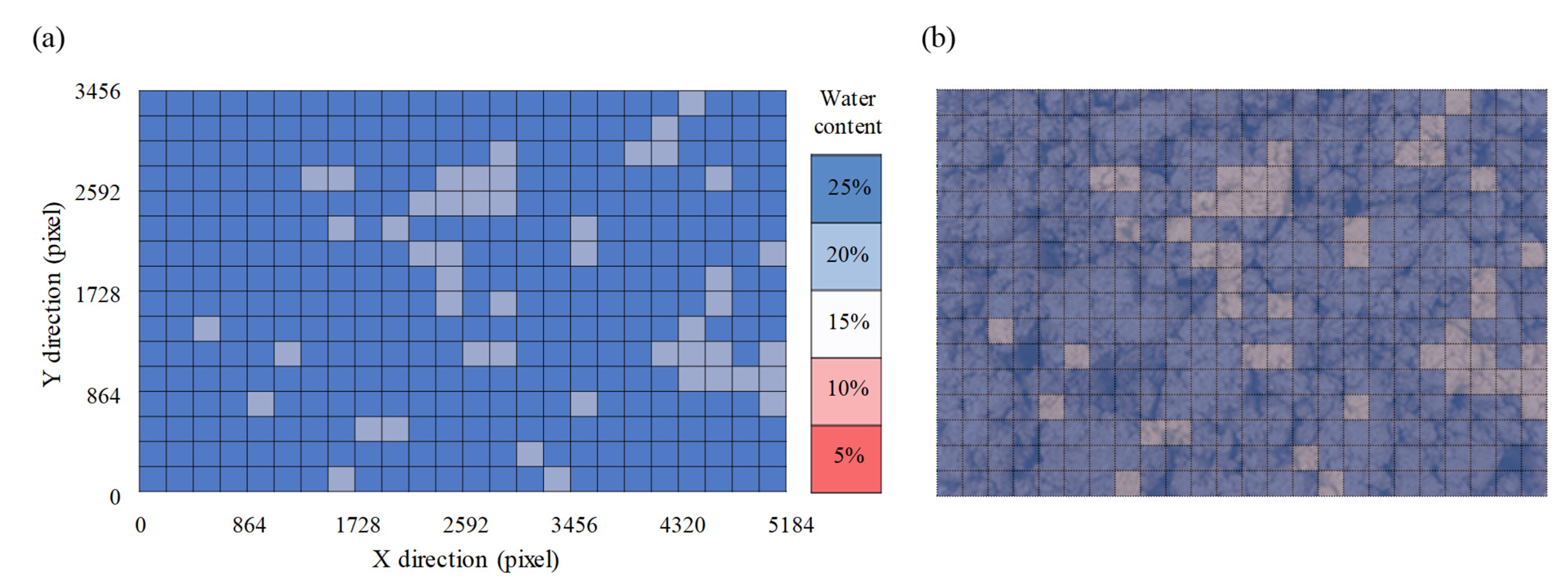
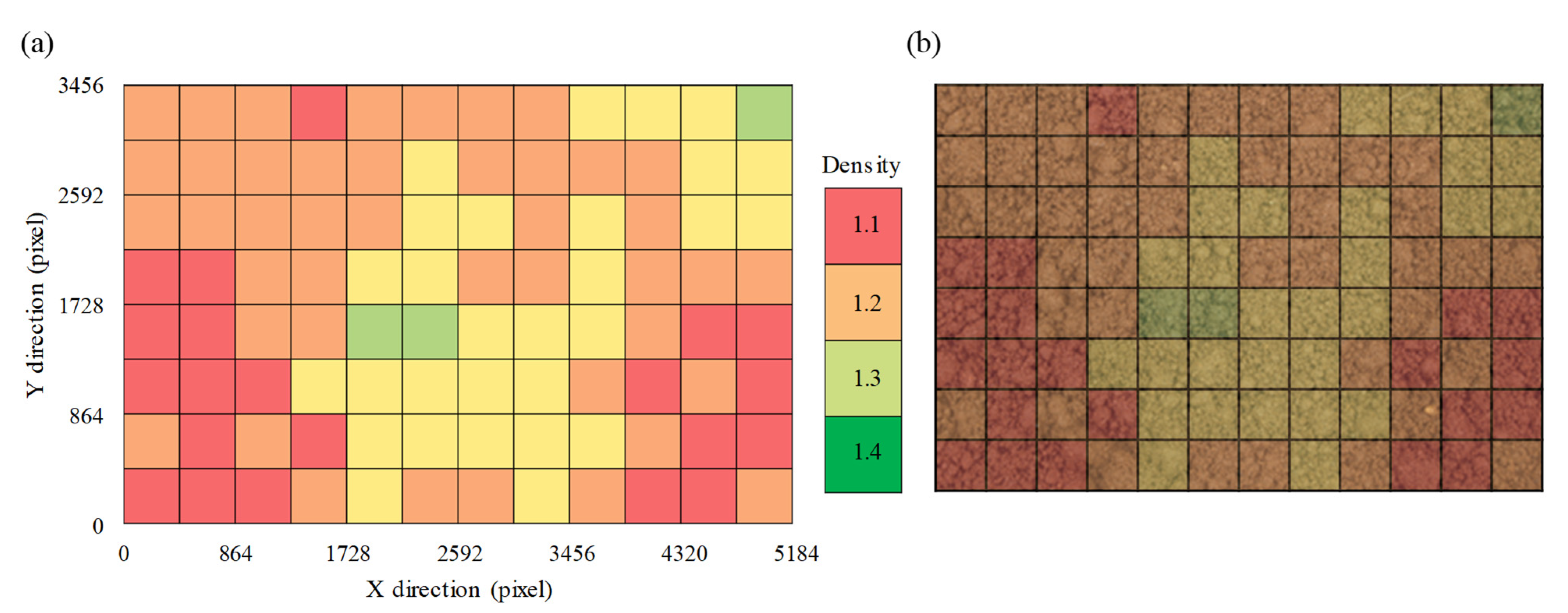
3.2. Output of CNN Model
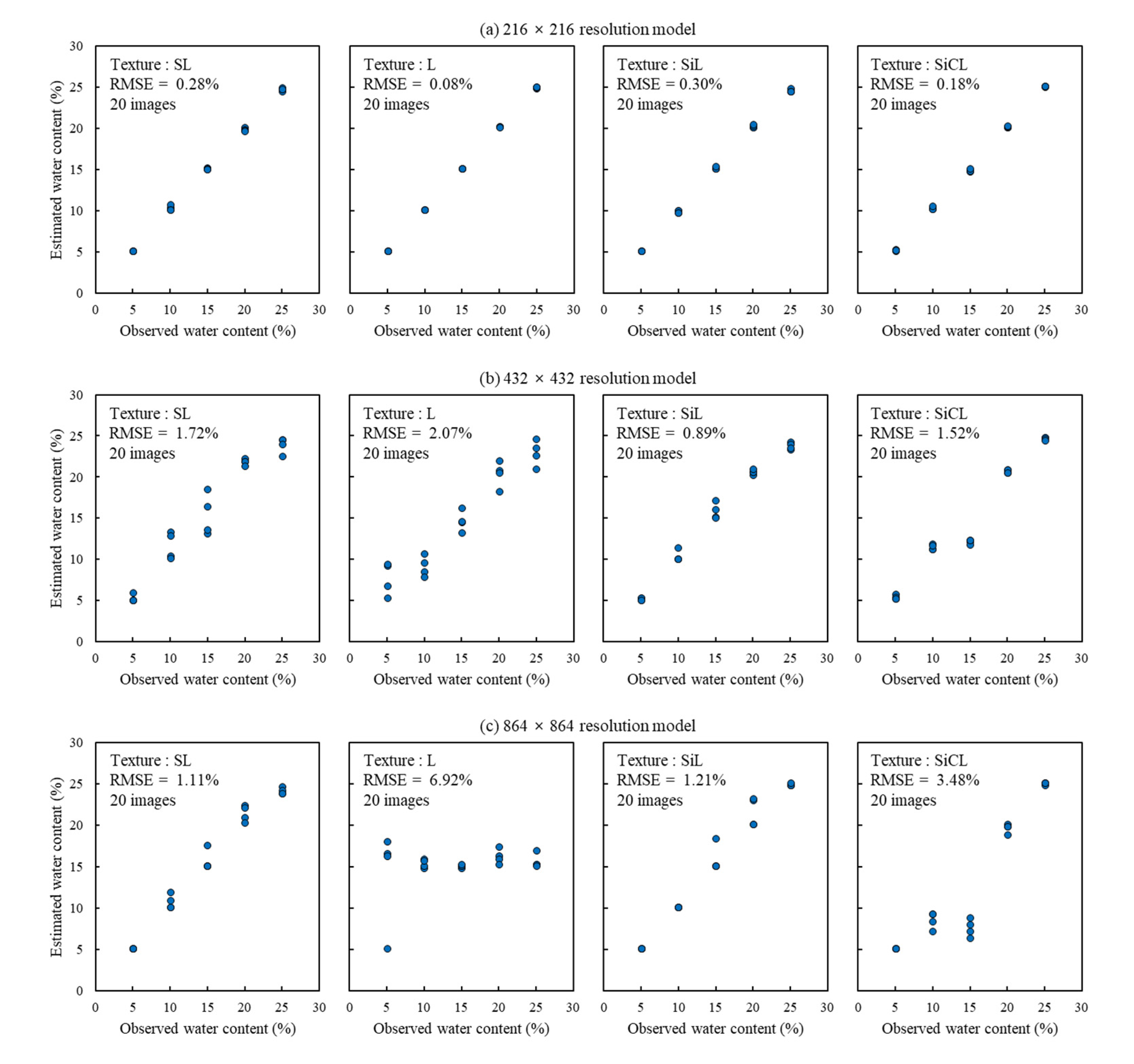
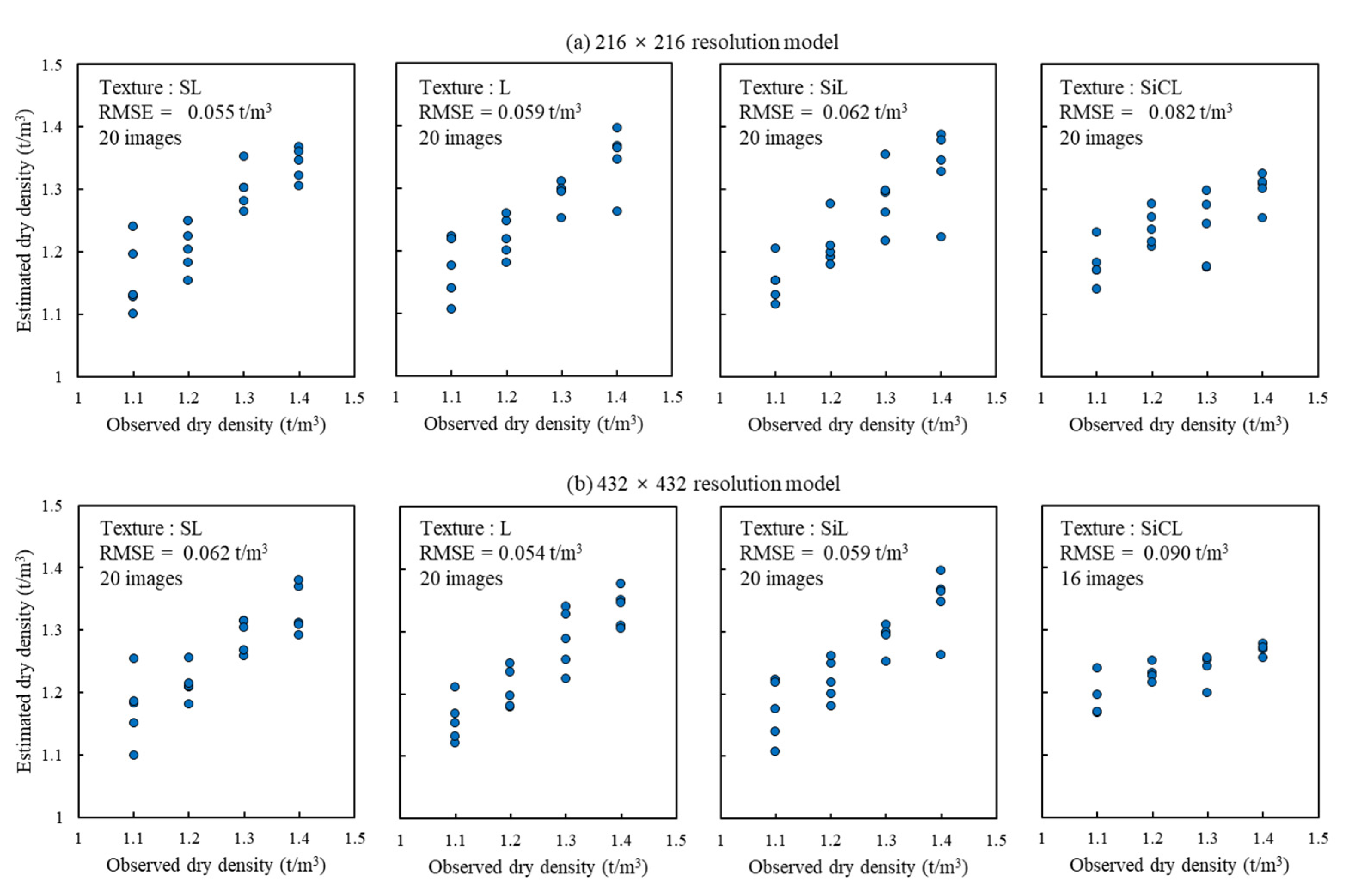
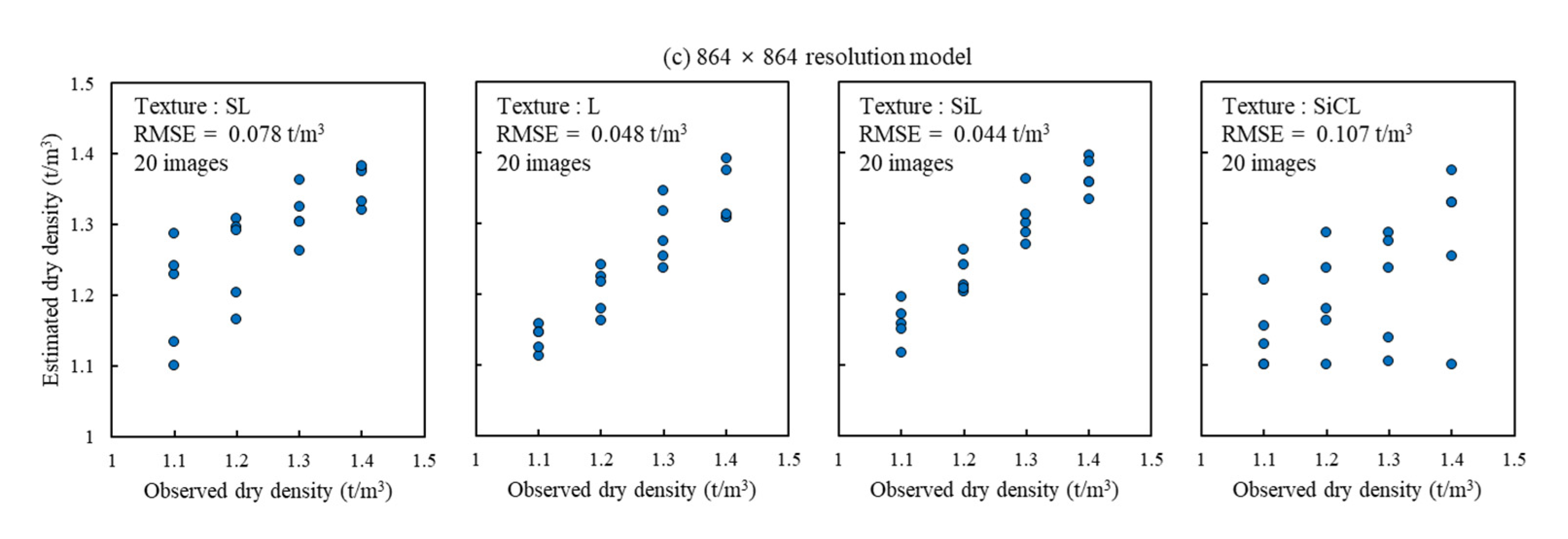
3.3. Accuuracy of Soil Water Content and Soil Dry Density Prediction
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Qafoku, N.P. Climate-change effects on soils: Accelerated weathering, soil carbon, and elemental cycling. Adv. Agron. 2015, 131, 111–172. [Google Scholar]
- Shani, U.; Dudley, L. Field studies of crop response to water and salt stress. Soil Sci. Soc. Am. J. 2001, 65, 1522–1528. [Google Scholar] [CrossRef]
- Keller, T.; Håkansson, I. Estimation of reference bulk density from soil particle size distribution and soil organic matter content. Geoderma 2010, 154, 398–406. [Google Scholar] [CrossRef]
- Mat, I.; Kassim, M.R.M.; Harun, A.N.; Yusoff, I.M. IoT in precision agriculture applications using wireless moisture sensor network. In Proceedings of the 2016 IEEE Conference on Open Systems (ICOS), Langkawi, Malaysia, 10–12 October 2016; pp. 24–29. [Google Scholar]
- Ge, Y.; Thomasson, J.A.; Sui, R. Remote sensing of soil properties in precision agriculture: A review. Front. Earth Sci. 2011, 5, 229–238. [Google Scholar] [CrossRef]
- Bengio, Y.; Courville, A.; Vincent, P. Representation learning: A review and new perspectives. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 1798–1828. [Google Scholar] [CrossRef] [Green Version]
- Zatarain Cabada, R.; Rodriguez Rangel, H.; Barron Estrada, M.L.; Cardenas Lopez, H.M. Hyperparameter optimization in CNN for learning-centered emotion recognition for intelligent tutoring systems. Soft Comput. 2020, 24, 7593–7602. [Google Scholar] [CrossRef]
- LeCun, Y.; Boser, B.; Denker, J.S.; Henderson, D.; Howard, R.E.; Hubbard, W.; Jackel, L.D. Backpropagation applied to handwritten zip code recognition. Neural Comput. 1989, 1, 541–551. [Google Scholar] [CrossRef]
- LeCun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef] [Green Version]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef] [Green Version]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going deeper with convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 1–9. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Huang, G.; Liu, Z.; Van Der Maaten, L.; Weinberger, K.Q. Densely connected convolutional networks. In Proceedings of the Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition; Honolulu, HI, USA, 21–26 July 2017, pp. 4700–4708.
- Veres, M.; Lacey, G.; Taylor, G.W. Deep learning architectures for soil property prediction. In Proceedings of the 2015 12th Conference on Computer and Robot Vision, Halifax, NS, Canada, 3–5 June 2015; pp. 8–15. [Google Scholar]
- Masri, D.; Woon, W.L.; Aung, Z. Soil property prediction: An extreme learning machine approach. In Proceedings of the International Conference on Neural Information Processing, Montreal, QC, Canada, 7–12 December 2015; pp. 18–27. [Google Scholar]
- You, J.; Li, X.; Low, M.; Lobell, D.; Ermon, S. Deep gaussian process for crop yield prediction based on remote sensing data. In Proceedings of the Thirty-First AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 4–9 February 2017. [Google Scholar]
- Padarian, J.; Minasny, B.; McBratney, A.B. Using deep learning for digital soil mapping. Soil 2019, 5, 79–89. [Google Scholar] [CrossRef] [Green Version]
- Srisutthiyakorn, N. Permeability Prediction of 3-D Binary Segmented Images using Neural Networks. In SEG Technical Program Expanded Abstracts; Society of Exploration Geophysicists: Houston, YX, USA, 2016. [Google Scholar]
- Guo, Y.; Li, J.-Y.; Zhan, Z.-H. Efficient hyperparameter optimization for convolution neural networks in deep learning: A distributed particle swarm optimization approach. Cybern. Syst. 2020, 52, 36–57. [Google Scholar] [CrossRef]
- Monshi, M.M.A.; Poon, J.; Chung, V.; Monshi, F.M. CovidXrayNet: Optimizing data augmentation and CNN hyperparameters for improved COVID-19 detection from CXR. Comput. Biol. Med. 2021, 133, 104375. [Google Scholar] [CrossRef]
- Zhang, M.; Li, H.; Pan, S.; Lyu, J.; Ling, S.; Su, S. Convolutional neural networks-based lung nodule classification: A surrogate-assisted evolutionary algorithm for hyperparameter optimization. IEEE Trans. Evol. Comput. 2021, 25, 869–882. [Google Scholar] [CrossRef]
- Bergstra, J.; Bengio, Y. Random search for hyper-parameter optimization. J. Mach. Learn. Res. 2012, 13, 281–305. [Google Scholar]
- Mortazi, A.; Bagci, U. Automatically designing CNN architectures for medical image segmentation. In Proceedings of the International Workshop on Machine Learning in Medical Imaging, Granada, Spain, 16 September 2018; pp. 98–106. [Google Scholar]
- Smith, L.N. A disciplined approach to neural network hyper-parameters: Part 1--learning rate, batch size, momentum, and weight decay. arXiv 2018, arXiv:1803.09820. [Google Scholar]
- Xiao, X.; Yan, M.; Basodi, S.; Ji, C.; Pan, Y. Efficient hyperparameter optimization in deep learning using a variable length genetic algorithm. arXiv 2020, arXiv:2006.12703. [Google Scholar]
- Park, J.S. Soil Classification and Characterization Using Unmanned Aerial Vehicle and Digital Image Processing. Ph.D. Thesis, Seoul National University, Seoul, Republic of Korea, 2017. [Google Scholar]
- Lucas, M.; Schlüter, S.; Vogel, H.-J.; Vetterlein, D. Roots compact the surrounding soil depending on the structures they encounter. Sci. Rep. 2019, 9, 16236. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Persson, M. Estimating surface soil moisture from soil color using image analysis. Vadose Zone J. 2005, 4, 1119–1122. [Google Scholar] [CrossRef]
- Zhu, Y.; Wang, Y.; Shao, M. Using soil surface gray level to determine surface soil water content. Sci. China Earth Sci. 2010, 53, 1527–1532. [Google Scholar] [CrossRef]
- Gómez-Robledo, L.; López-Ruiz, N.; Melgosa, M.; Palma, A.J.; Capitán-Vallvey, L.F.; Sánchez-Marañón, M. Using the mobile phone as Munsell soil-colour sensor: An experiment under controlled illumination conditions. Comput. Electron. Agric. 2013, 99, 200–208. [Google Scholar] [CrossRef]
- Zanetti, S.S.; Cecílio, R.A.; Alves, E.G.; Silva, V.H.; Sousa, E.F. Estimation of the moisture content of tropical soils using colour images and artificial neural networks. Catena 2015, 135, 100–106. [Google Scholar] [CrossRef]
- Dos Santos, J.F.; Silva, H.R.; Pinto, F.A.; Assis, I.R.d. Use of digital images to estimate soil moisture. Rev. Bras. De Eng. Agrícola E Ambient. 2016, 20, 1051–1056. [Google Scholar] [CrossRef]
- Kim, D.; Son, Y.; Park, J.; Kim, T.; Jeon, J. Evaluation of calibration method for field application of UAV-based soil water content prediction equation. Adv. Civ. Eng. 2019, 2019, 2486216. [Google Scholar] [CrossRef] [Green Version]
- Brewer, R. Fabric and Mineral Analysis of Soils; John Wiley and Sons: New York, NY, USA, 1964. [Google Scholar]
- Van den Akker, J.; Soane, B. Compaction. In Encyclopedia of Soils in the Environment; Hillel, D., Ed.; Elsevier: Oxford, UK, 2005; pp. 285–293. [Google Scholar]
- Ruser, R.; Sehy, U.; Weber, A.; Gutser, R.; Munch, J. Main driving variables and effect of soil management on climate or ecosystem-relevant trace gas fluxes from fields of the FAM. In Perspectives for Agroecosystem Management; Elsevier: Amsterdam, The Netherlands, 2008; pp. 79–120. [Google Scholar]
- Vrochidou, E.; Oustadakis, D.; Kefalas, A.; Papakostas, G.A. Computer vision in self-steering tractors. Machines 2022, 10, 129. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model. | Texture | Accuracy (Correct/Total) | ||
|---|---|---|---|---|
| 216 × 216 Resolution | 432 × 432 Resolution | 864 × 864 Resolution | ||
| WC prediction | SL | 100% (20/20) | 90% (18/20) | 95% (19/20) |
| L | 100% (20/20) | 100% (20/20) | 35% (7/20) | |
| SiL | 100% (20/20) | 100% (20/20) | 85% (17/20) | |
| SiCL | 100% (20/20) | 100% (20/20) | 100% (20/20) | |
| Overall accuracy | 100% (80/80) | 97.5% (78/80) | 78.75% (63/80) | |
| Dry density prediction | SL | 75% (15/20) | 60% (12/20) | 50% (10/20) |
| L | 70% (14/20) | 65% (13/20) | 50% (10/20) | |
| SiL | 65% (13/20) | 75% (15/20) | 65% (13/20) | |
| SiCL | 60% (12/20) | 37.5% (6/16) | 40% (8/20) | |
| Overall accuracy | 67.5% (54/20) | 60.5% (46/76) | 51.3% (41/80) | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, D.; Kim, T.; Jeon, J.; Son, Y. Convolutional Neural Network-Based Soil Water Content and Density Prediction Model for Agricultural Land Using Soil Surface Images. Appl. Sci. 2023, 13, 2936. https://doi.org/10.3390/app13052936
Kim D, Kim T, Jeon J, Son Y. Convolutional Neural Network-Based Soil Water Content and Density Prediction Model for Agricultural Land Using Soil Surface Images. Applied Sciences. 2023; 13(5):2936. https://doi.org/10.3390/app13052936
Chicago/Turabian StyleKim, Donggeun, Taejin Kim, Jihun Jeon, and Younghwan Son. 2023. "Convolutional Neural Network-Based Soil Water Content and Density Prediction Model for Agricultural Land Using Soil Surface Images" Applied Sciences 13, no. 5: 2936. https://doi.org/10.3390/app13052936