The purpose of this work is to create a parametrized model for the three different-scaled harvesters in order to study the influence of the magnetic suspensions and the coils on the dynamics and performance via sensitivity analyses. The model needs to be validated by comparison with the experimental results of the prototypes on the dynamic workbench.
3.1. Experimental and Numerical Results
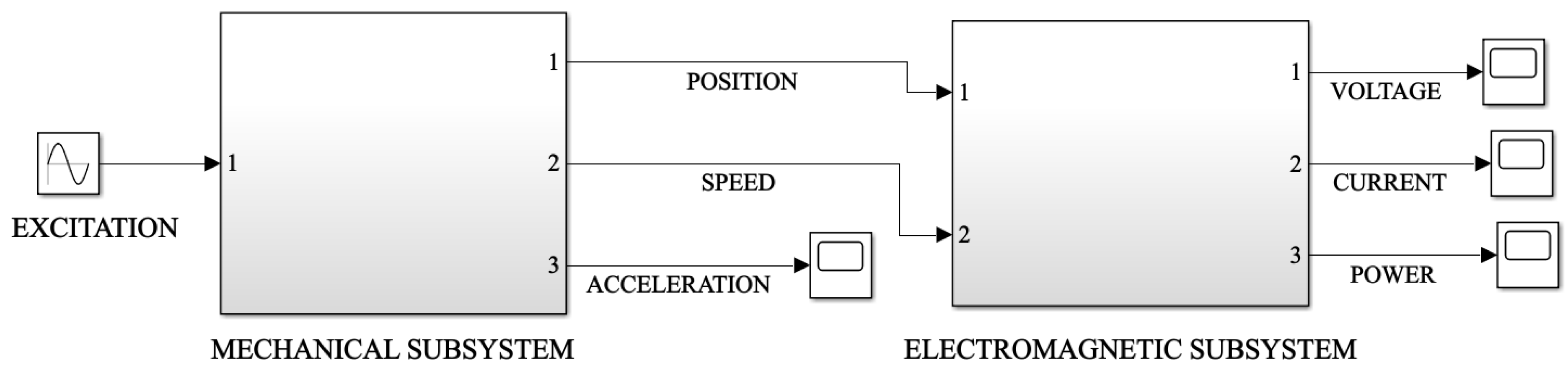
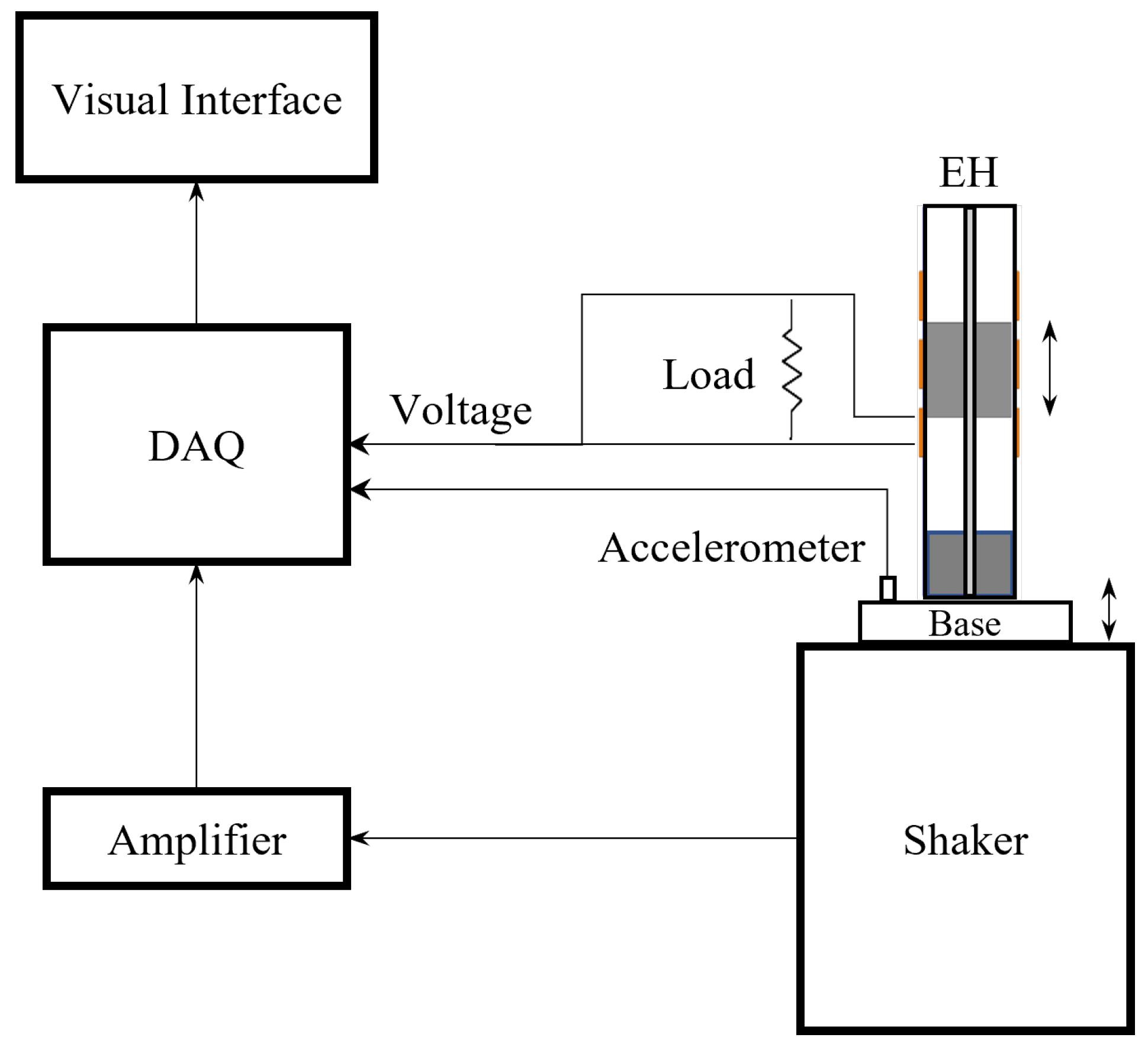
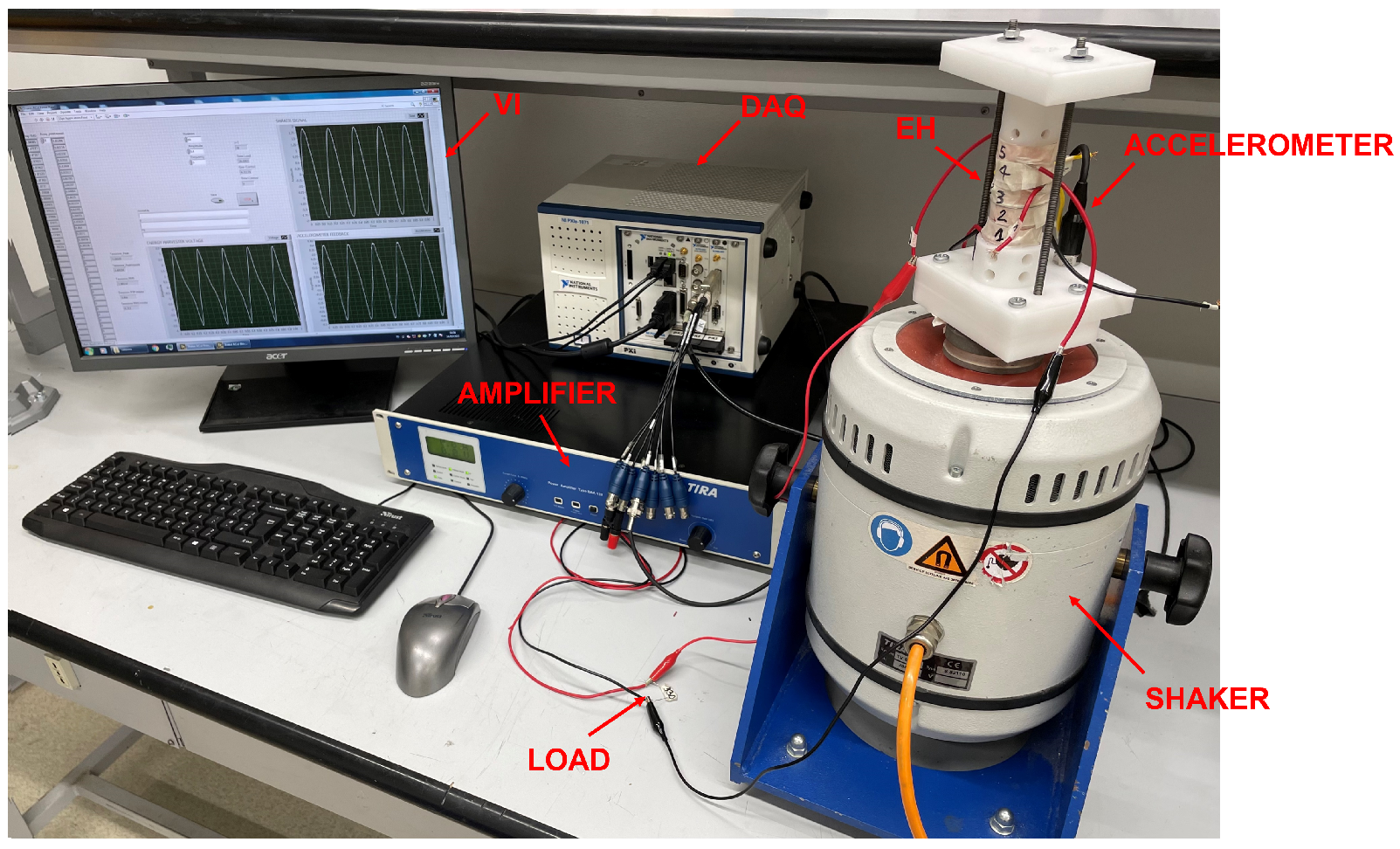
The dynamic behavior of the harvester system can be studied through the evaluation of the Frequency Response Functions (FRFs). These curves show the harvester performances when different excitation amplitudes and frequencies are applied to the system. The non-linear softening behavior of the device can be highlighted by analyzing the FRFs. The non-linearities cause the resonance frequency of the system to decrease as the external excitation amplitude increases. The FRFs evaluation is performed both numerically and experimentally for model validation. FRFs are reported in terms of the root mean square value of the generated power on the load. Numerical dynamic simulations are performed in MATLAB/Simulink environment by introducing the non-linear stiffness and electromagnetic characteristics resulting from Ansys Maxwell numerical simulations. Experimental FRFs are obtained by testing harvester prototypes on the dynamic workbench described in
Section 2.3. Results are computed using the optimum resistive load described in
Section 2.1 and connecting only the coil that maximizes the output power.
Table 6 shows the values of the variables used to compute the FRFs both for the numerical model and experimental setup. The number of turns and
values at this stage are not optimized for the three harvesters.
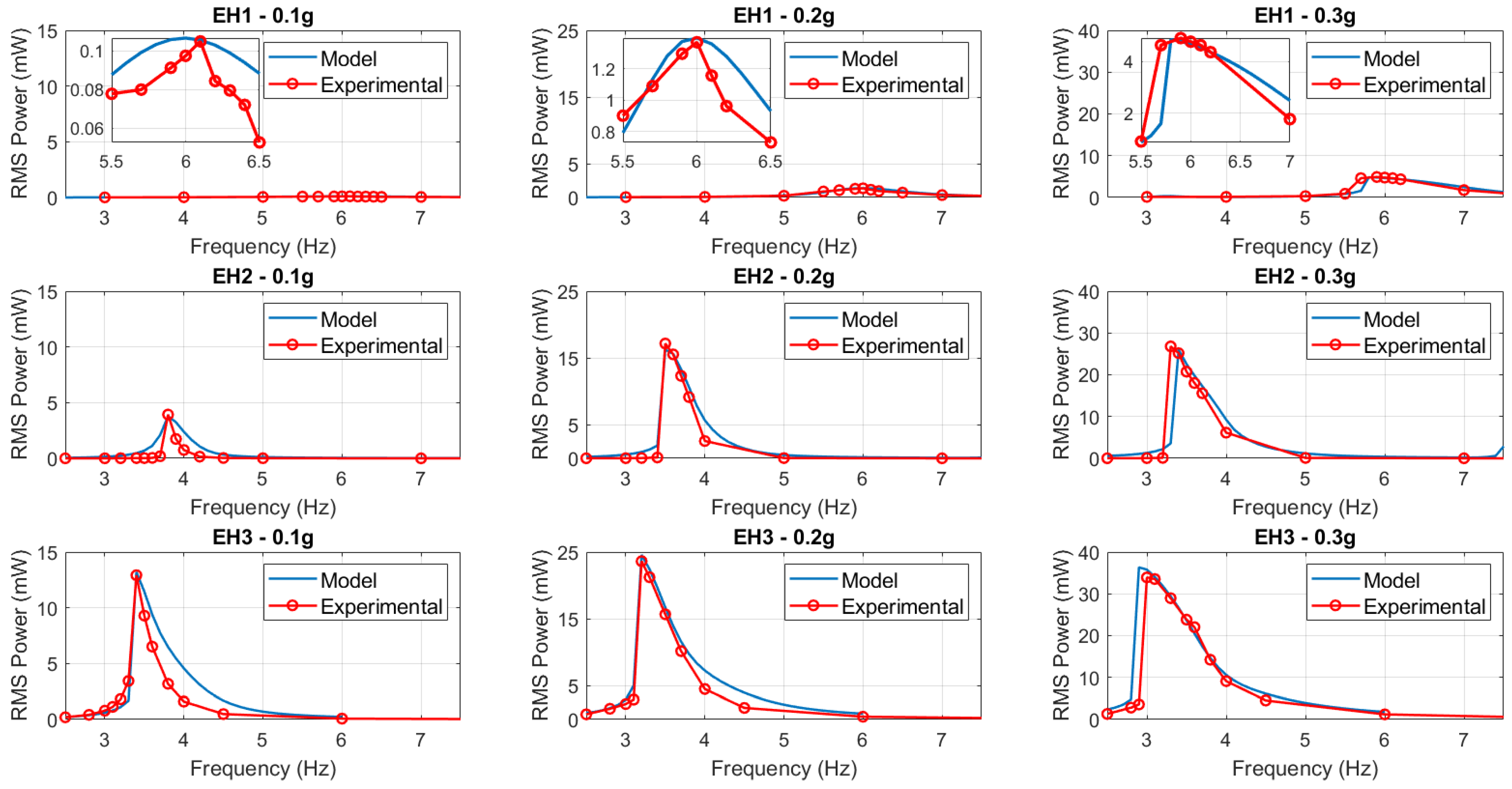
Simulation results need to be compared to experimental results of tests on harvester prototypes. A satisfactory superimposition of experimental and numerical FRFs leads to the validation of the proposed model.
Figure 10 reports the comparison between numerical and experimental RMS power FRFs of EH1, EH2, and EH3 for different excitation amplitudes from 0.1 g to 0.3 g. For the purpose of quantifying the preciseness of these models, an error between the numerical and the experimental results in terms of power should be computed. A comparison method can be the evaluation of the relative error in terms of RMS peak power and resonance frequency between the model and the experimental ones:
Table 7 shows the errors obtained for EH1, EH2, and EH3. The peak errors between the model and experimental results are negligible for all the harvesters and different excitation amplitudes. The errors on the resonance frequencies are definitely low, confirming the ability of this model to identify correctly the resonance conditions. This quality is relevant considering the key role of tuning the resonance frequency to the external excitation fundamental frequencies for maximum power generation. The superimposition of the curves leads to overall fine results for all the harvesters. This positive outcome of the study allows confirming the validity of the proposed model to describe the dynamics and transducing mechanism of different-scaled GVEHs. The following step is to perform sensitivity analyses on the fully-parametrized model to define the optimization process of the devices.
3.2. Design Optimization
The validated model can be used for the numerical optimization of the harvester size and performance. The optimization phase is based on a design approach considering the application of the harvester and its constraints. The main design issue for a VEH is to tune its natural resonance frequency to the fundamental excitation frequency of the harvested vibrations. For this reason, the optimization of the generated power is not sufficient and should be performed along with the sizing and tuning process. This paper studies the influence of the magnet’s dimensions on the GVEH asymmetric magnetic suspension characteristics of resonance frequency and equilibrium position. Sensitivity analyses on the diameter and height of both moving and fixed magnets allow us to evaluate the configuration of the suspension that has the target natural frequency of the destined application. Moreover, the study on the equilibrium position is linked to the tube length to give a proper stroke to the moving magnet in the asymmetric suspension. Once the target frequency and equilibrium position are matched, a study on the optimization of the generated power can be performed to maximize the efficiency of the device already complying with the design constraints of the application.
As mentioned in
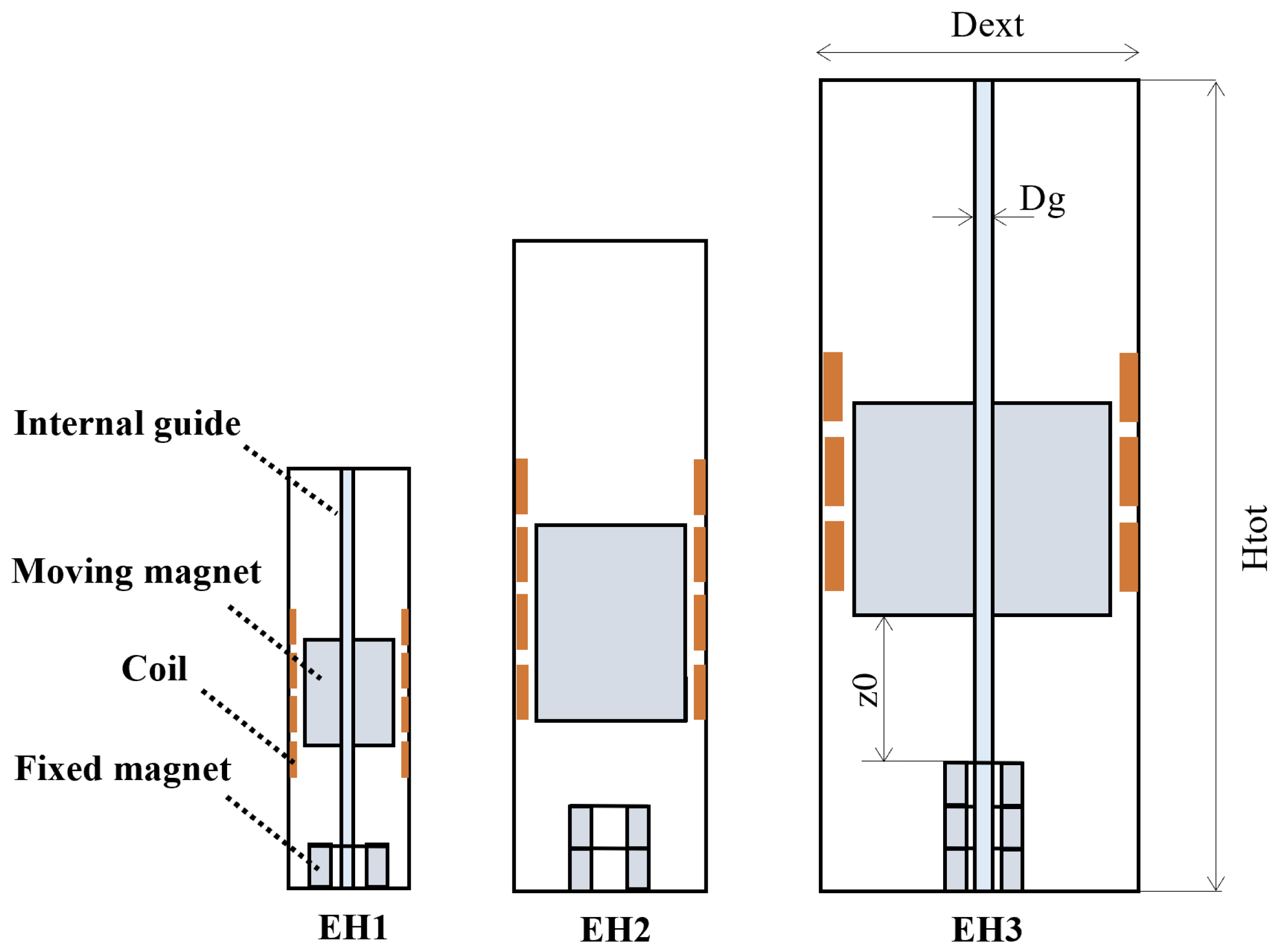
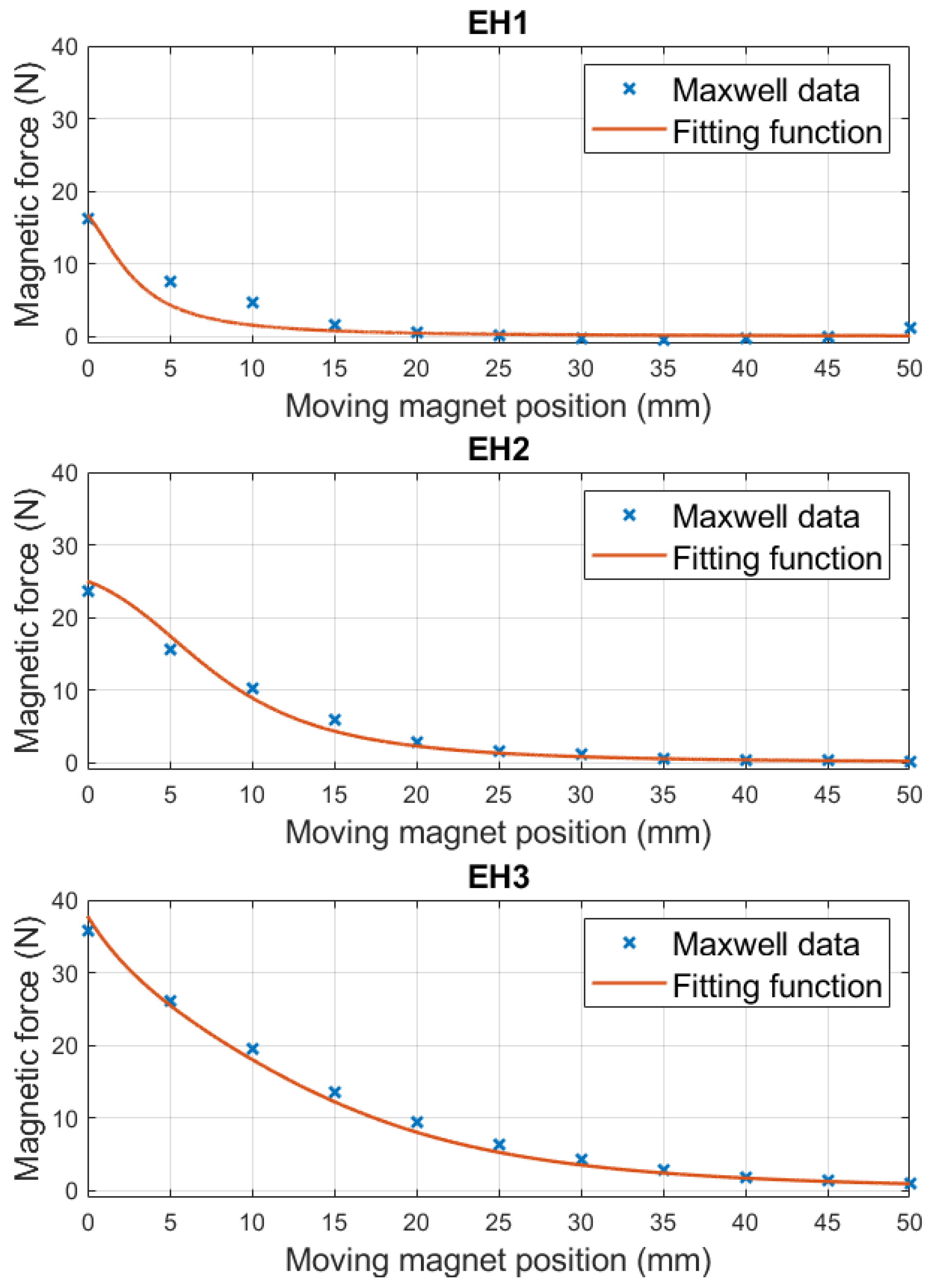
Section 2.1, the asymmetric magnetic suspension consists of only one fixed magnet at the bottom end of the tube and a moving magnet that oscillates under the action of the magnetic repulsive and gravitational restoring forces. Ring-shaped magnets are used in this study due to the use of the internal guide in the tube. Consequently, the magnets parameters that are studied in the design stage are the external diameter, internal diameter, and the height along the axial direction.
Table 8 reports the details of the configurations adopted in the numerical model for the sensitivity analyses.
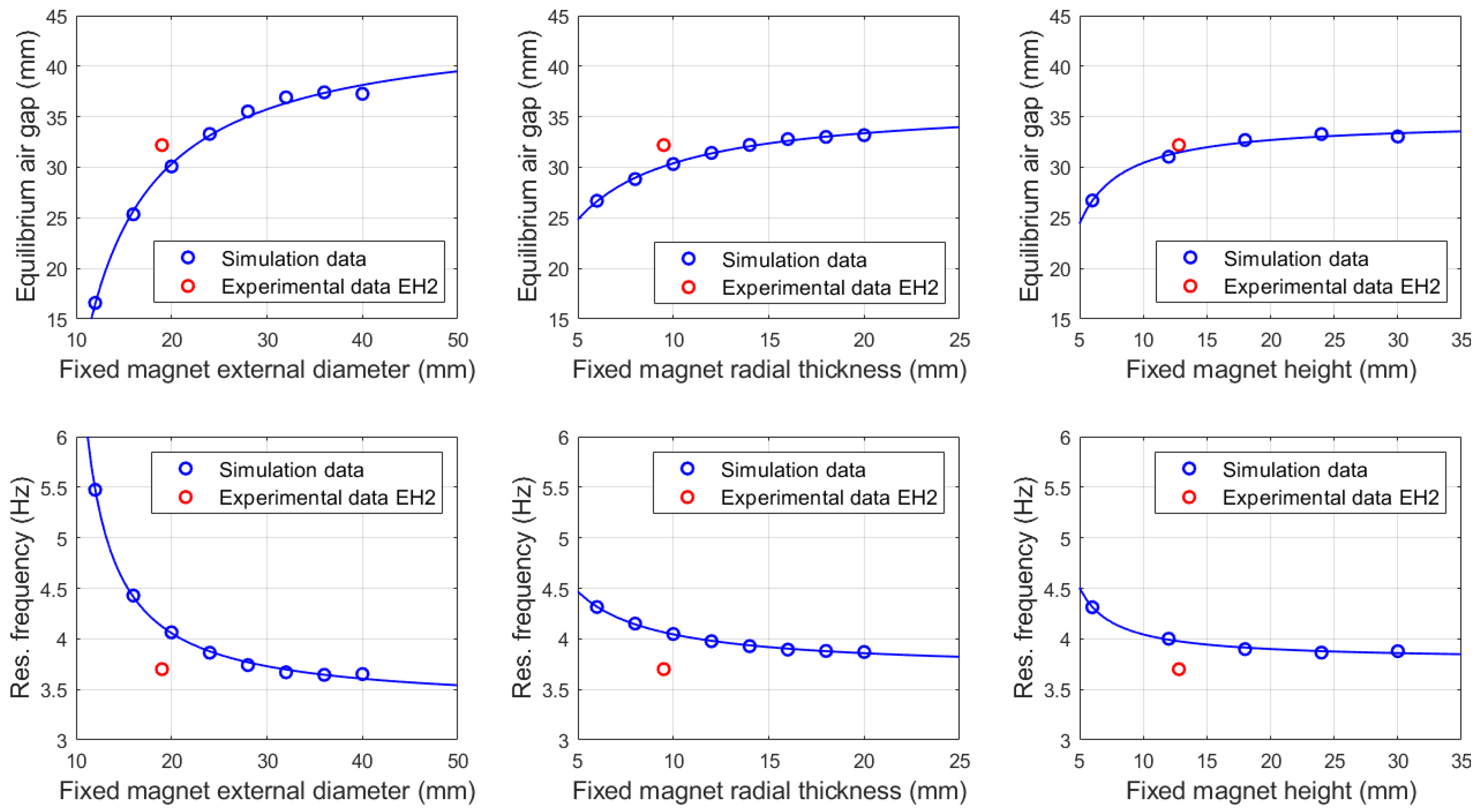
The first sensitivity analysis is performed on the fixed magnet. The external diameter, radial thickness, and height variables are changed one at a time, keeping the others at a constant value. The moving magnet has the dimensions of EH2 configuration for all the sensitivity analyses of the fixed magnet, in order to have a comparison between the simulations and experimental results.
Figure 11 reports the outcome of the study on the fixed magnet dimensions. The equilibrium position is referred to the air gap between the upper face of the fixed magnet and the lower face of the moving one. The curves show that increasing the volume of the moving magnet, whether via diameter or height, the resonance frequency decreases and the air gap increases. In particular, the most sensitive parameter is the external diameter as it generates the highest variation in terms of frequency and air gap. This result can be related to the formulation of the resonance frequency of the GVEH linearized system [
32]:
where:
m is the seismic mass of the moving magnet;
g is the gravitational acceleration;
is the equilibrium air gap;
is the vacuum permeability;
, are the magnetic field intensities of moving and fixed magnet, respectively;
, are the coercive forces of moving and fixed magnet, respectively;
, are the pole surface areas of moving and fixed magnet, respectively;
Since the field intensity depends on the polar surface area, the greater influence of the diameter parameter with respect to the height is justified. Moreover, increasing the fixed magnet height results in a low increase in the air gap, which is the relative distance between the magnet. However, the absolute position of the moving magnet increases strongly as it is the sum of the air gap and the fixed magnet height, hence the tube length needs to grow to allow a proper stroke to the proof mass. The radial thickness of the fixed magnet influences the tuning of the stiffness in a similar way to the external diameter parameter. In the end, for the purpose of tuning the resonance frequency, it is better to variate the internal or external diameters of the fixed magnet, keeping the height at the minimum possible value in order to reduce the tube length and volume.
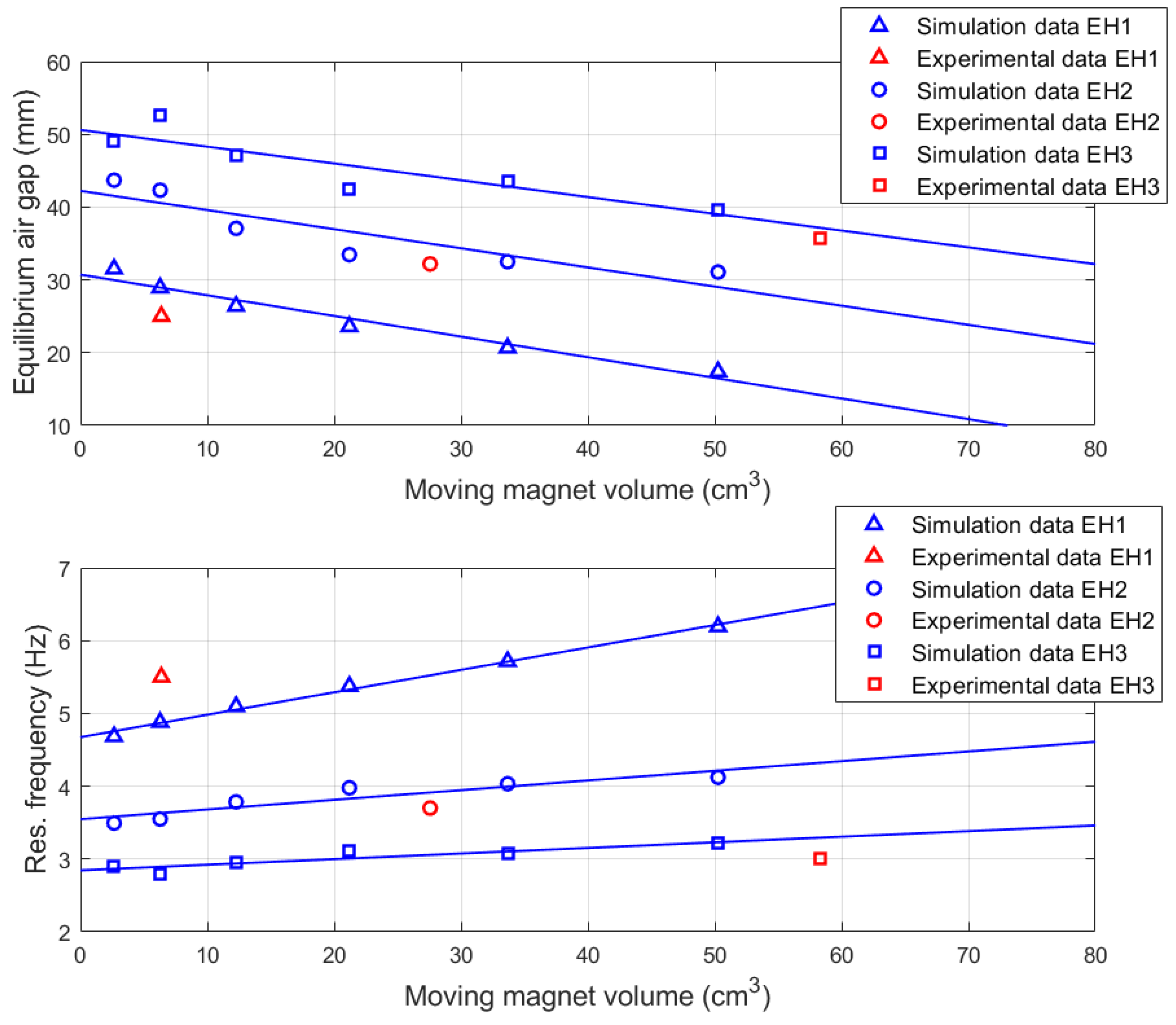
The second sensitivity analysis is performed on the moving magnet. External diameter and height vary together keeping their ratio at a fixed value equal to 1. This study is carried out three times using the fixed magnet of each of the three configurations EH1, EH2, and EH3 in order to insert the experimental results and compare them with the simulation data. The results of the analysis are reported in
Figure 12. The trend linear curves for the three configurations interpolate quite well with the experimental results of the real devices. With increasing fixed magnet height, the slope of the trend curve decreases, hence the influence of the moving magnet volume on the resonance frequency and air gap reduces. In all three cases, increasing the moving magnet volume causes the resonance frequency to grow and consequently the air gap to reduce. The influence of the moving magnet on the resonance frequency formulation (17) is not only in terms of magnet field intensity, as happens for the fixed magnet, but also in terms of the mass at the numerator. A sensitivity analysis is performed also on the internal diameter of the moving magnet since an internal guide is used for the reasons explained in
Section 2.1. The outcome is not particularly relevant as the influence on the studied variables of natural frequency and air gap is negligible.
Moreover, the moving magnet sensitivity analysis should not be based only on the mechanical characteristics but also on the electromagnetic ones, as it influences the generated power. The expression of the linearized electrical power in resonance condition is the following [
32]:
where:
The moving magnet volume influences power in terms of mass and damping factors, both electromagnetic and viscous as it changes the magnetic flux linkage and the friction values. Increasing the moving magnet volume results in increasing power generation, hence the moving magnet should be as big as possible considering the design constraints of the device application. The fixed magnet is chosen for resonance frequency tuning and reducing tube length. The application of these devices is the power supply of wireless IoT sensor nodes in freight trains for structural monitoring. The vertical harvested vibrations on the wagon coaches using Y25 bogies have fundamental frequencies around 4 Hz resulting from Multibody simulations, depending on the train speed [
19]. The installation constraints impose that the maximum diameter of the device should not be greater than 20 mm, while the maximum height should be 100 mm.
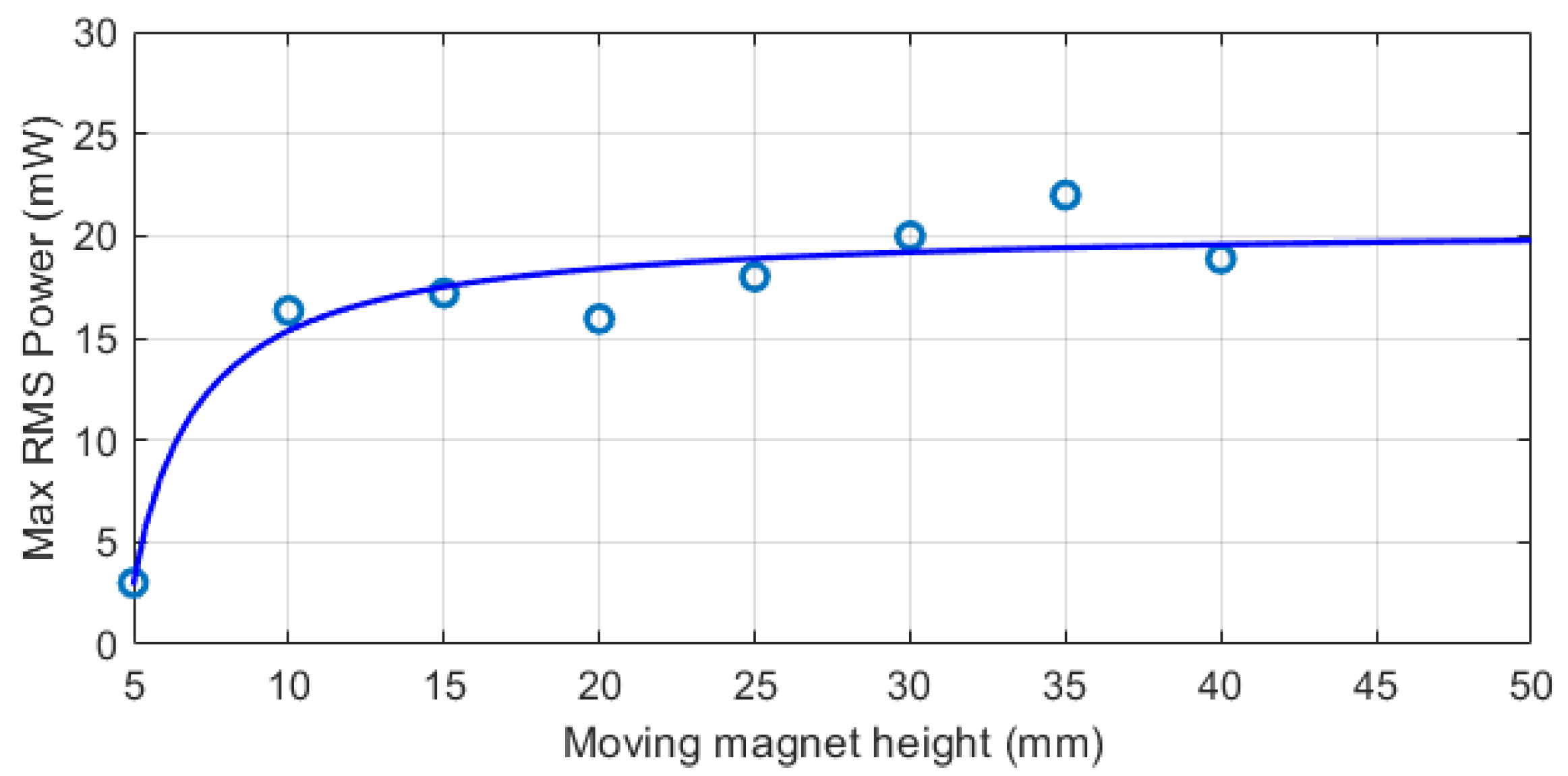
Figure 10 shows that the fixed magnet should have an external diameter of 20 mm for having the targeted resonance frequency of 4 Hz. The internal diameter of 5 mm is chosen for the requirement of an internal guide. The height value is 5 mm in order to minimize the air gap and reduce the tube length. The moving magnet diameter is set as 20 mm in order to have the maximum possible value to increase the generated power. The internal diameter is chosen as small as possible for the same power conversion reason, setting the value at 5 mm as the fixed magnet. The moving magnet height is chosen after a sensitivity analysis on the maximum generated power at resonance condition, reported in
Figure 13. The external excitation amplitude is 0.5 g, using the optimized fixed magnet and a coil of 500 turns and an axial length of 10 mm. The chosen moving magnet height is 30 mm as a compromise between power enhancement and tube length for the application.
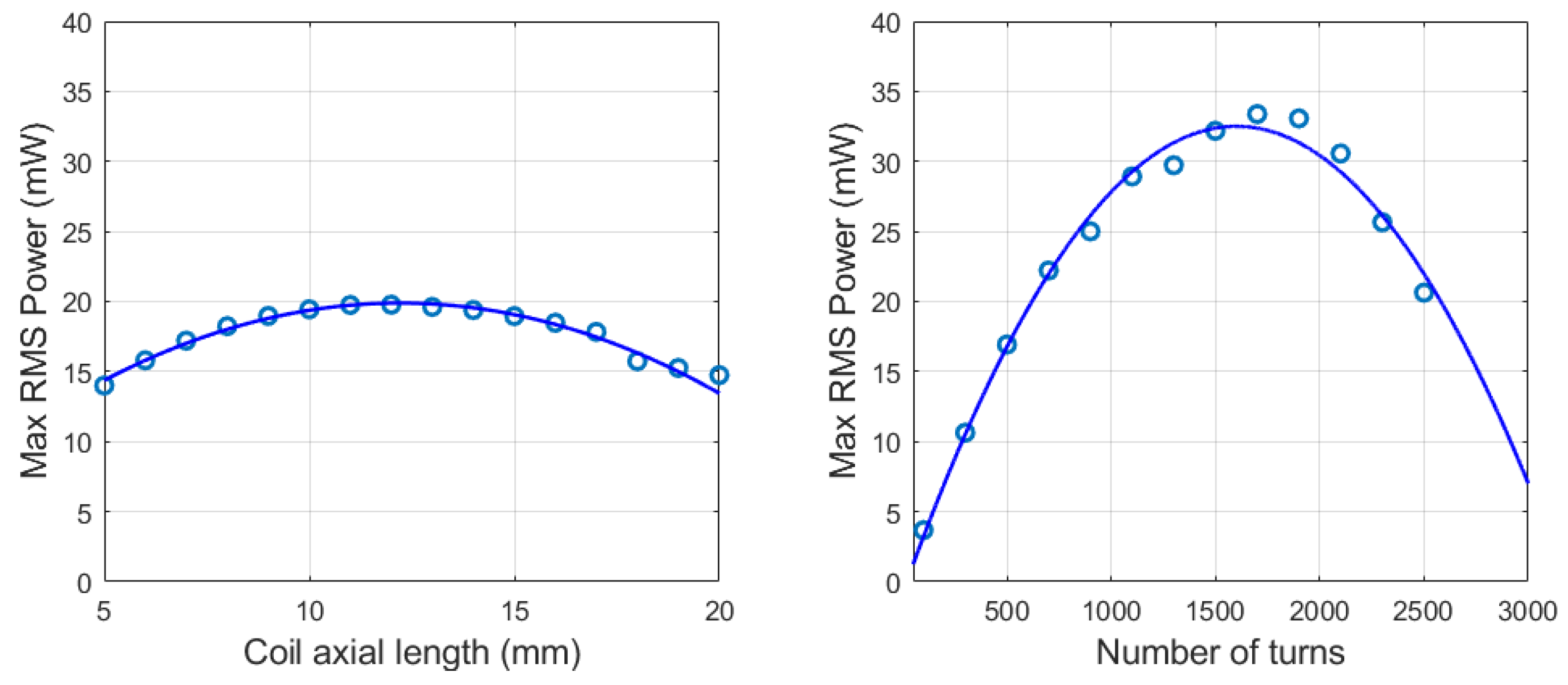
Once the two optimized magnets characterizing the magnetic suspension are defined, the optimization of the coil parameters can be performed. The two main variables are the axial length of the coil and the number of turns, both influencing the resistance value and the magnetic flux linkage distribution (2)–(6). This study allows us to define the combination of the two parameters that maximize the power, as it depends on the electromagnetic damping factor (20). The generated power is evaluated using the optimum resistive load for each coil configuration based on Equation (
7). The results of the analyses are reported in
Figure 14. The coil axial length analysis is carried out by testing values from 5 to 20 mm, keeping the coil diameter and number of radial turns constant at 500, and applying an external excitation of 0.5 g. The optimum value is between 11 and 12 mm, but a value of 10 mm is chosen to simplify the design and prototyping processes with a negligible loss of performance. Then, the number of turns analysis is performed keeping the axial length fixed at 10 mm, and applying an external excitation of 0.5 g. The resulting optimum value is about 1500 turns with a significant improvement of generated power from about 20 mW to about 32 mW. All the optimized parameters and performances of the final energy harvester are summarised in
Table 9.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}