
Machine Vision-Based Chinese Walnut Shell–Kernel Recognition and Separation

 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
2.1.1. Data Acquisition and Processing of Walnut Shells and Kernels
2.1.2. Dataset Preparation
2.1.3. Test Conditions
2.2. Methods
2.2.1. Walnut Shell–Kernel Recognition Algorithm Based on YOLOX
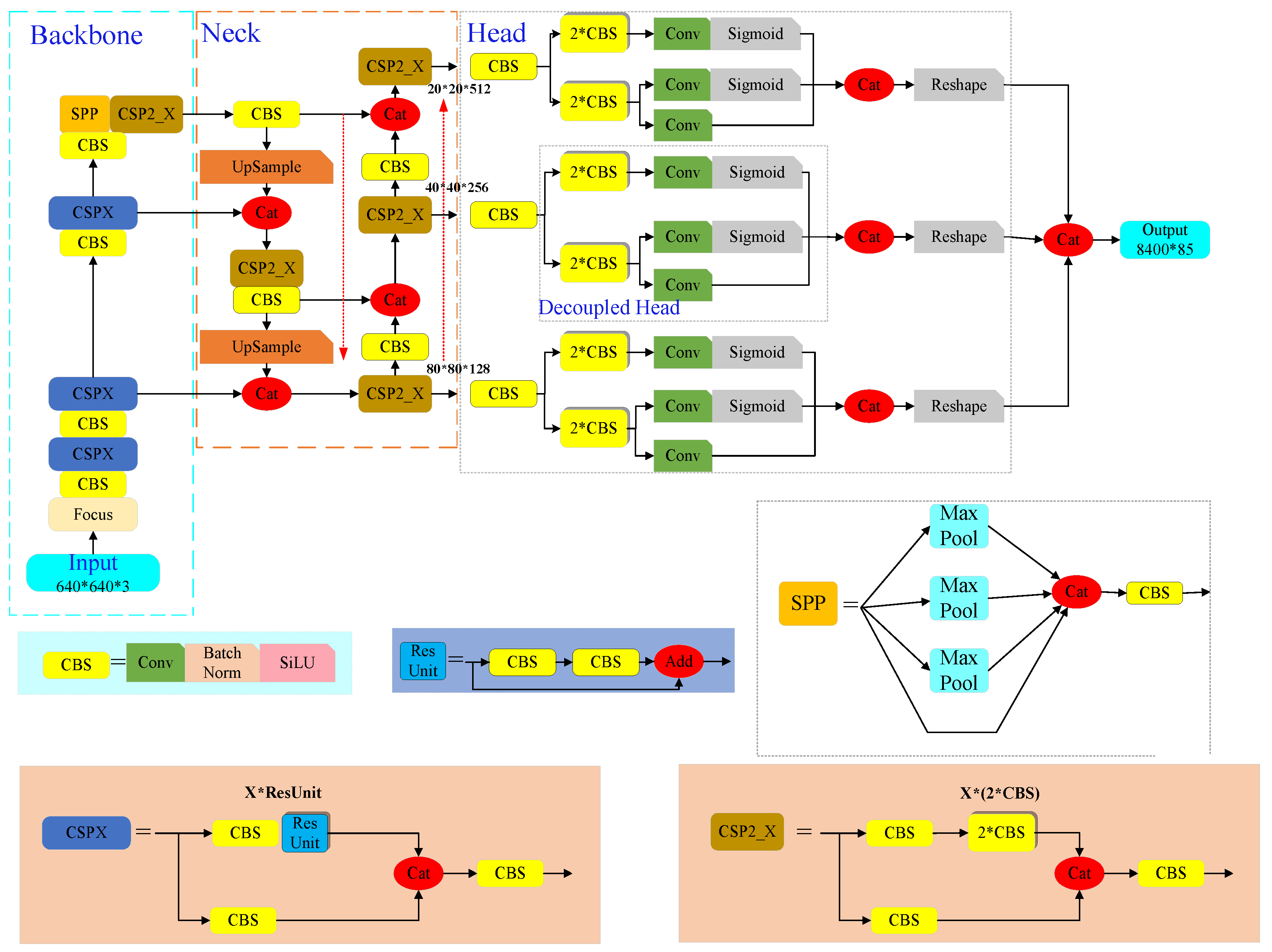
2.2.2. YOLOX Network Structure
2.2.3. Evaluation Metrics
3. Results and Analysis
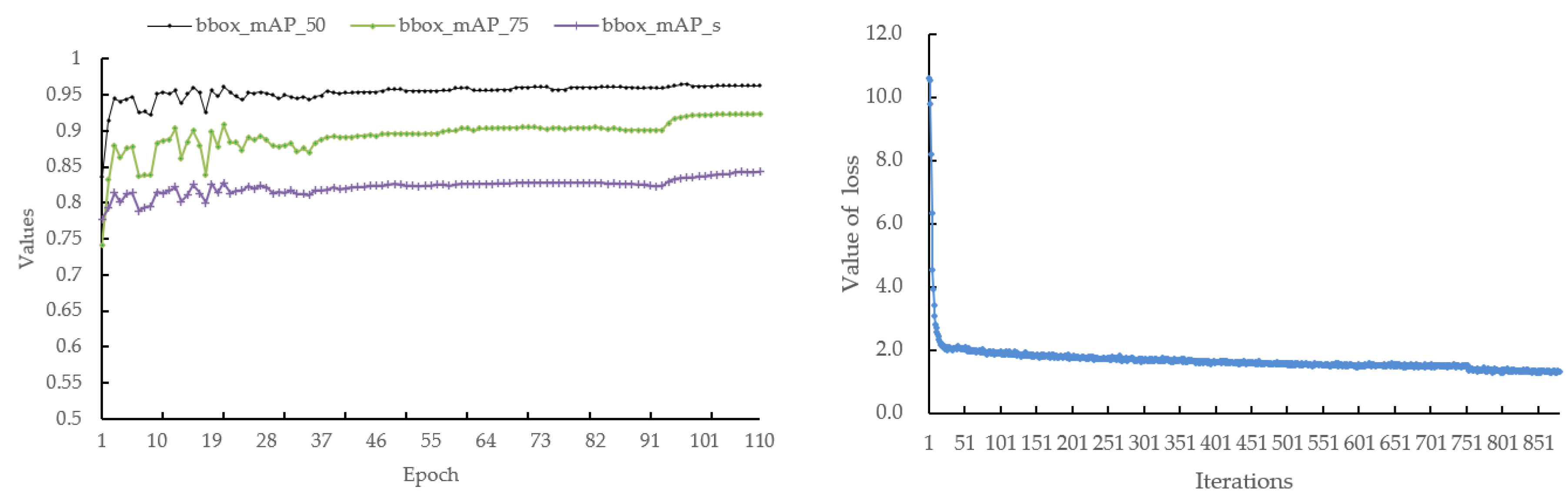
3.1. Model Training
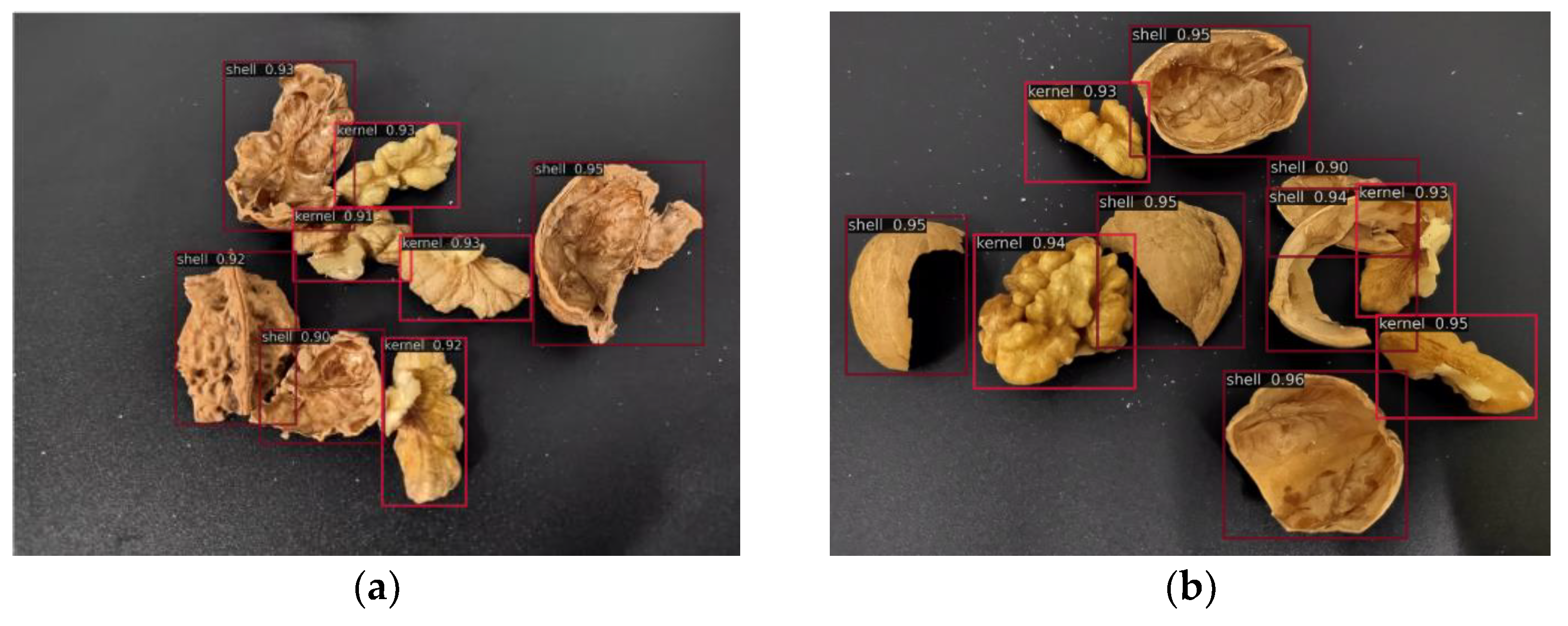
3.2. Detection Results
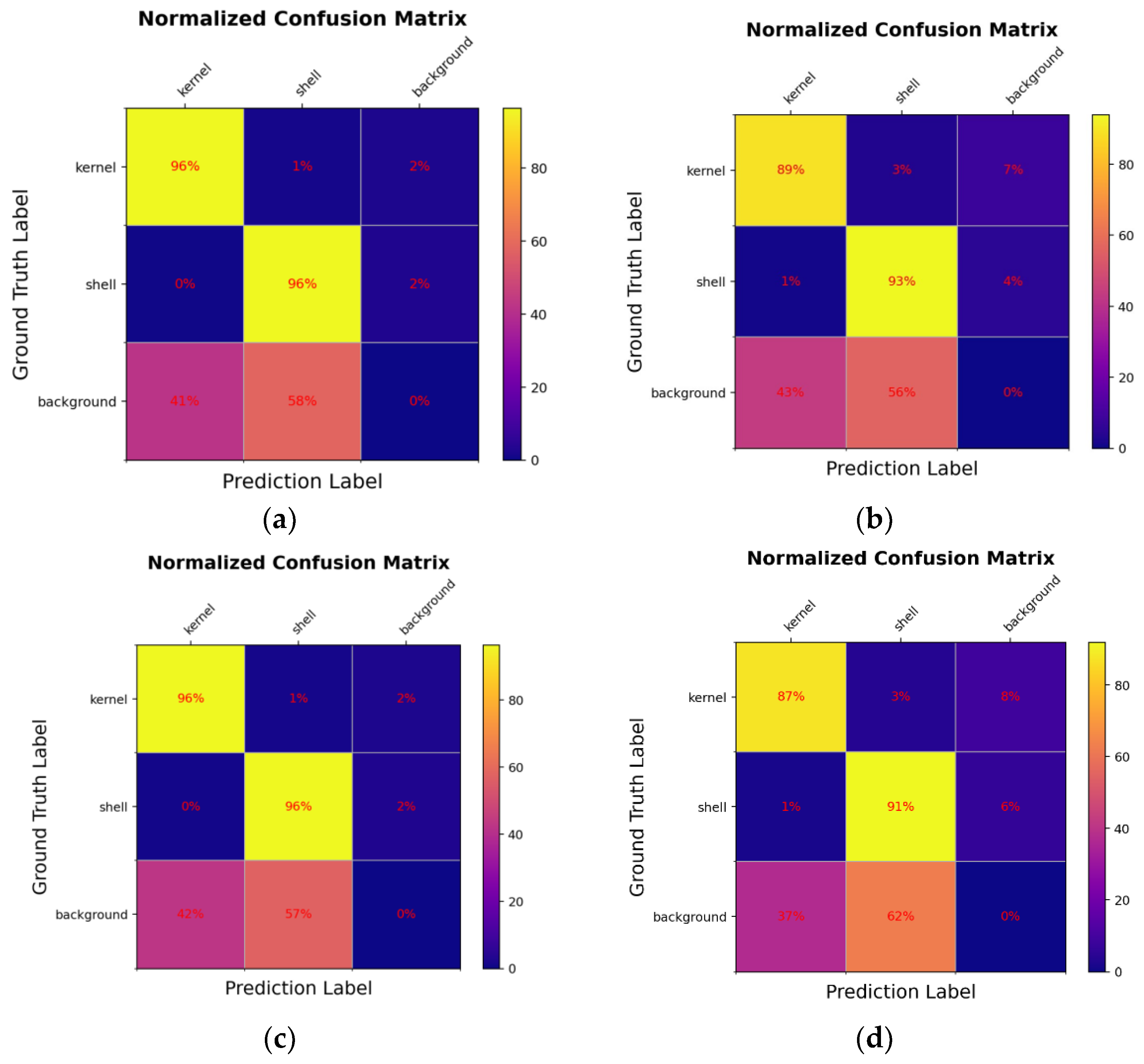
3.3. Performance Comparison of Several Target Detection Algorithms
3.4. Walnut Shell–Kernel Detection Effect Analysis under Different Scenes
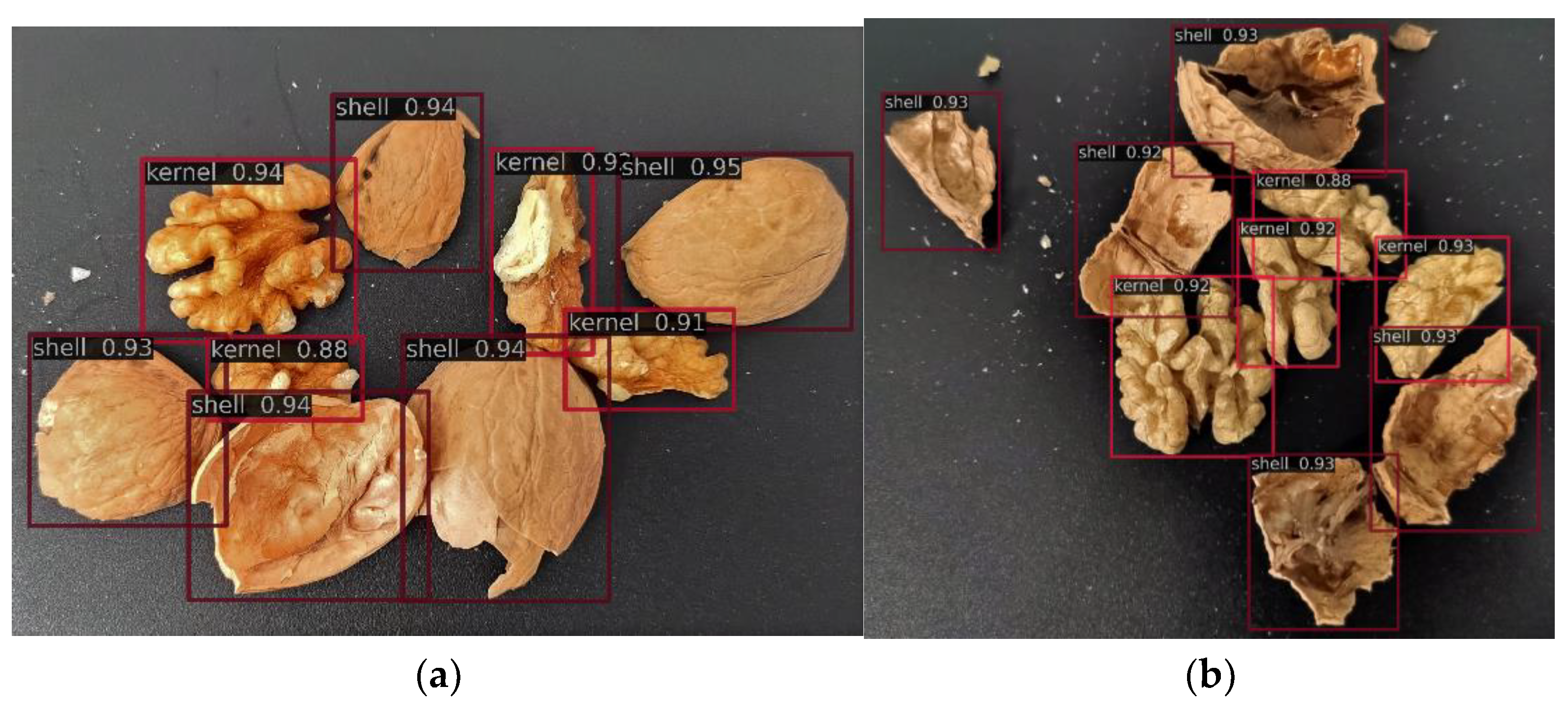
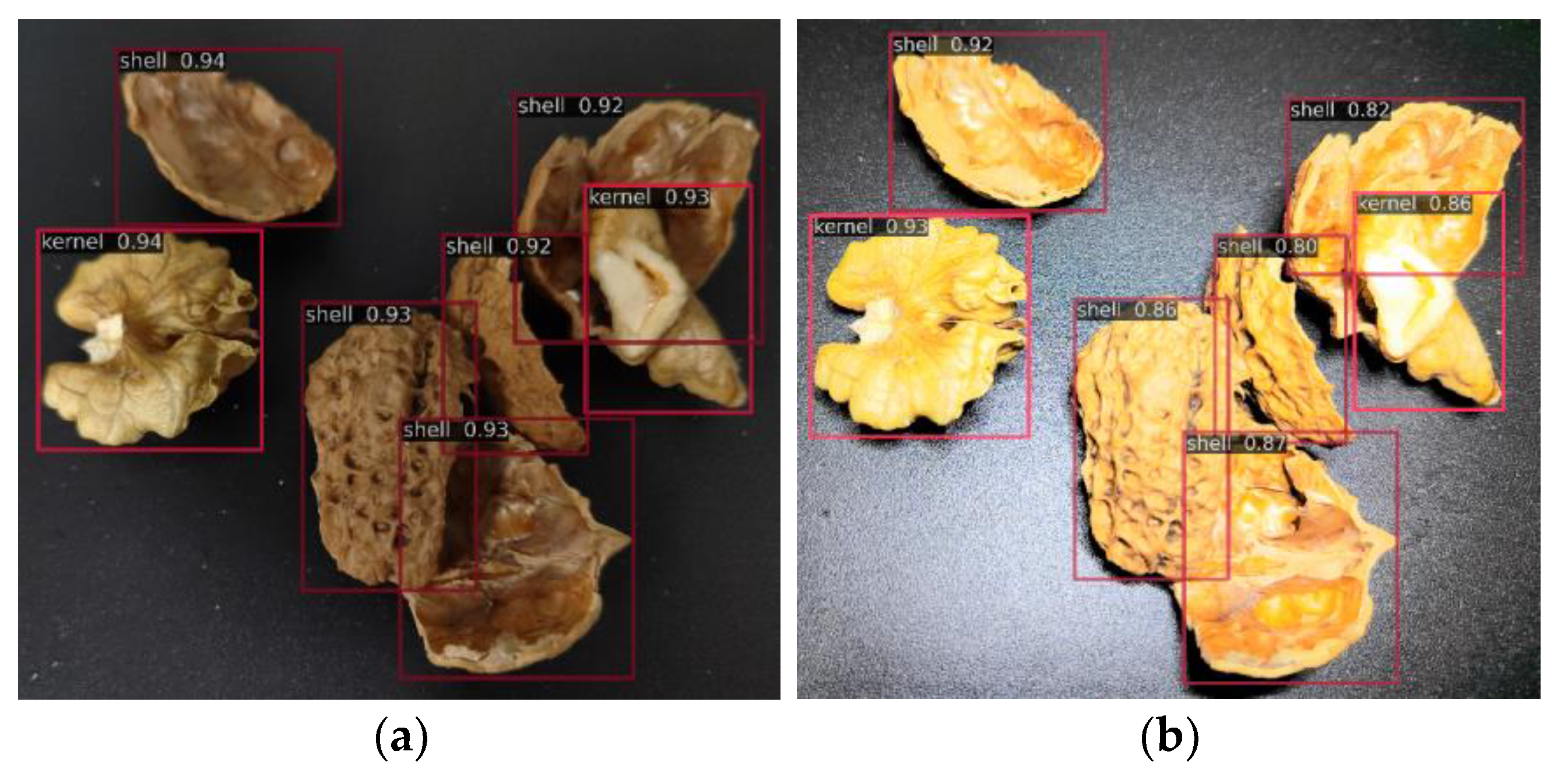
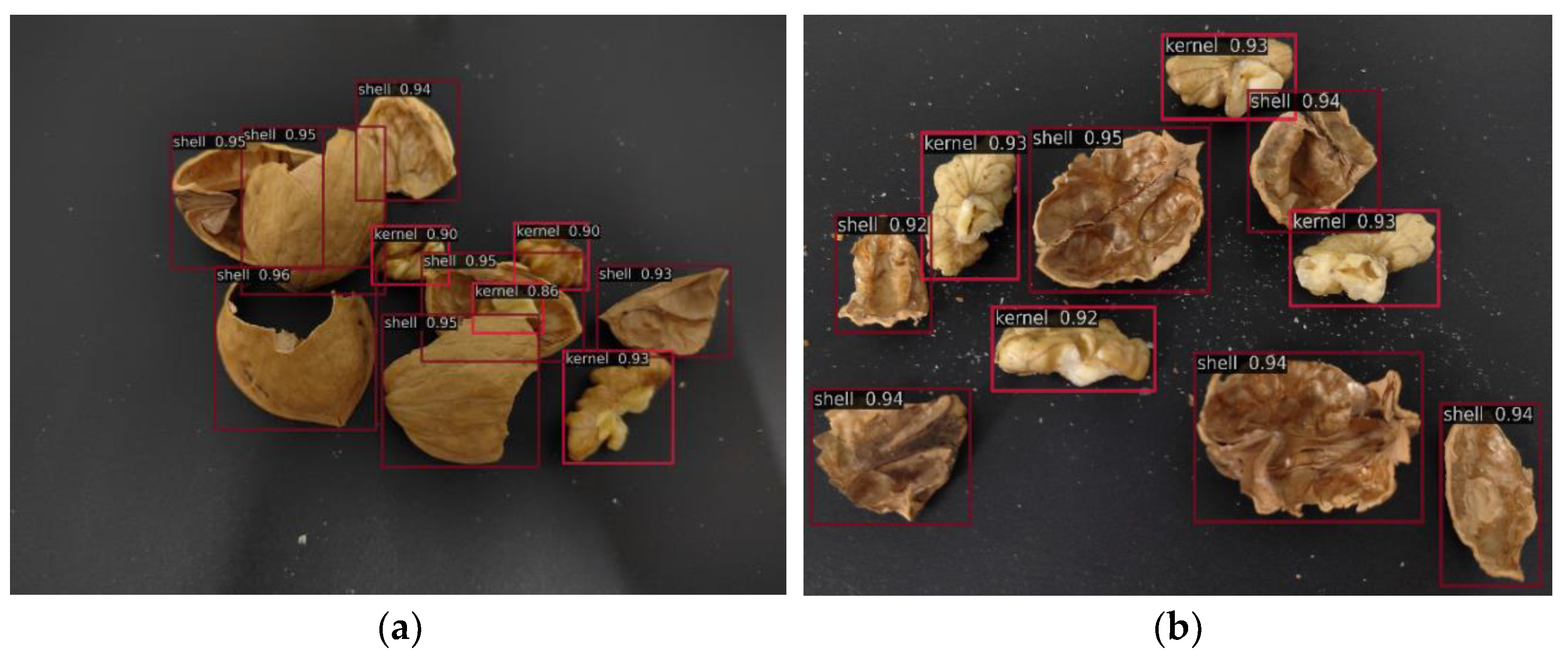
3.4.1. Detection Analysis of Different Walnut Species Based on the Network Model
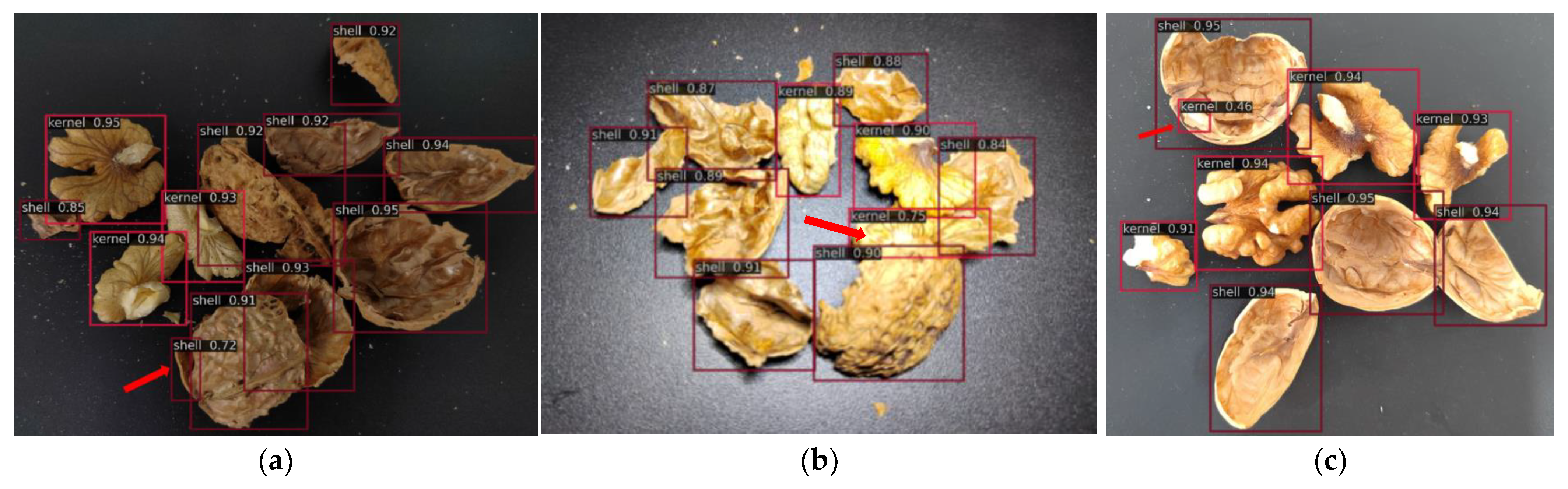
3.4.2. Walnut Shell–Kernel Detection Effect Analysis under Different Illumination Intensities
3.4.3. Walnut Shell–Kernel Detection Effect under Mutual Shielding
4. Discussions
5. Conclusions
- (1)
- For walnut shell–kernel detection, the AP50, APs, and AR of the YOLOX algorithm are 96.3%, 80.6%, and 84.7%, respectively. The model size was 99 MB, and the FLOPs were 351.9. The AR of the YOLOX target detection algorithm is increased by 10%, 2.3%, and 9% than those of YOLOv3, Faster R-CNN, and SSD target detection algorithms. Moreover, APs increased by 12.1%, 3.9%, and 9.8%, respectively. Moreover, YOLOX has apparent advantages in the model size and detection speed. It can decrease the consumption of memory to a great extent during model training, which is beneficial for the migration application of the model.
- (2)
- Under different walnut species, supplementary light, and shielding conditions, AP50 of the YOLOX algorithm is higher than 95%, and AR is higher than 79%. The YOLOX algorithm can realise accurate walnut shell–kernel recognition and has good robustness. Research conclusions can provide technological support to walnut shell–kernel separation.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- An, M.; Cao, C.; Wu, Z.; Luo, K. Detection Method for Walnut Shell-Kernel Separation Accuracy Based on Near-Infrared Spectroscopy. Sensors 2022, 22, 8301. [Google Scholar] [CrossRef] [PubMed]
- Liu, M.; Li, C.; Cao, C.; Tu, D.; Li, X.; Che, J.; Yang, H.; Zhang, X.; Shi, M.; Zhao, H.; et al. Research progress of key technology and device for size-grading shell-breaking and shell-kernel separation of walnut. Trans. Chin. Soc. Agric. Eng. 2020, 36, 294–310. [Google Scholar]
- Niu, H. Experimental Study and Design of Separation Device of Walnut Shell and Kernel. Master’s Thesis, Tarim University, Alaer, China, 2017. [Google Scholar]
- Jiang, L.; Zhu, B.; Rao, X.; Berney, G.; Tao, Y. Discrimination of black walnut shell and pulp in hyperspectral fluorescence imagery using Gaussian kernel function approach. J. Food Eng. 2006, 81, 108–117. [Google Scholar] [CrossRef]
- Nahal, A.M.; Arabhosseini, A.; Kianmehr, M.H. Separation of shelled walnut particles using pneumatic method. Int. J. Agric. Biol. Eng. 2013, 6, 88–93. [Google Scholar]
- Krishnan, P.; Berlage, A.G. Separation of shells from walnut meats using magnetic methods. Trans. ASAE 1984, 27, 1990–1992. [Google Scholar] [CrossRef]
- Wang, Z.; Xiao, W. Electrostatic Fruit Shell Kernel Separator. CN2041490, 26 July 1989. Available online: https://kns.cnki.net/kcms2/article/abstract?v=kxaUMs6x7-4I2jr5WTdXtkOSbVhUnTwo_UJJAd4NGDqpeyCQzr6nn8GZTDCXBoMWz67kms7HBWUKA5AE-8ynjg%3d%3d&uniplatform=NZKPT (accessed on 6 June 2023).
- Liu, M.; Li, C.; Cao, C.; Wang, L.; Li, X.; Che, J.; Yang, H.; Zhang, X.; Zhao, H.; He, G.; et al. Walnut Fruit Processing Equipment: Academic Insights and Perspectives. Food Eng. Rev. 2021, 13, 822–857. [Google Scholar] [CrossRef]
- Cao, C.; Li, Z.; Luo, K.; Mei, P.; Wang, T.; Wu, Z.; Xie, C. Experiment on Winnowing Mechanism and Winnowing Performance of Hickory Material. Trans. Chin. Soc. Agric. Mach. 2019, 50, 105–112. [Google Scholar]
- Li, H.; Tang, Y.; Zhang, H.; Liu, Y.; Zeng, Y.; Niu, H. Technological parameter optimization for walnut shell-kernel winnowing device based on neural network. Front. Bioeng. Biotechnol. 2023, 11, 1107836. [Google Scholar] [CrossRef]
- Wang, T.; Cao, C.; Xie, C.; Li, Z. Design of hickory nut’ shell and kernel sorting system based on fuzzy clustering algorithm. Food Mach. 2018, 34, 110–114. [Google Scholar]
- Jin, F.; Qin, L.; Jiang, L.; Zhu, B.; Tao, Y. Novel separation method of black walnut meat from shell using invariant features and a supervised self-organizing map. J. Food Eng. 2008, 88, 75–85. [Google Scholar] [CrossRef]
- Fan, X.; Xu, Y.; Zhou, J.; Li, Z.; Peng, X.; Wang, X. Detection system for grape leaf diseases based on transfer learning and updated CNN. Trans. Chin. Soc. Agric. Eng. 2021, 37, 75–85. [Google Scholar]
- Lin, J.; Wu, X.; Chai, Y.; Yin, H. Structure optimization of convolutional neural networks: A survey. Acta Autom. Sin. 2020, 46, 24–37. [Google Scholar]
- Huu-Thiet, N.; Chien, C. Analytic Deep Neural Network-Based Robot Control. IEEE/ASME Trans. Mechatron. 2022, 27, 2176–2184. [Google Scholar]
- Agu, S.; Eze, C.; Omeje, U. Separation of oil palm kernel and shell mixture using soil and palm ash slurries. Niger. J. Technol. 2017, 36, 621–627. [Google Scholar] [CrossRef]
- Yao, J.; Qi, J.; Zhang, J.; Shao, H.; Yang, J.; Li, X. Real-Time Detection Algorithm for Kiwifruit Defects Based on YOLOv5. Electronics 2021, 10, 1711. [Google Scholar] [CrossRef]
- Xiao, B.; Nguyen, M.; Yan, Q. Fruit ripeness identification using YOLOv8 model. Multimed. Tools Appl. 2023, 9. [Google Scholar] [CrossRef]
- Wang, Z.; Jin, L.; Wang, S.; Xu, H. Apple stem/calyx real-time recognition using YOLO-v5 algorithm for fruit automatic loading system. Postharvest Biol. Technol. 2022, 185, 111808. [Google Scholar] [CrossRef]
- Wu, Z.; Luo, K.; Cao, C.; Liu, G.; Wang, E.; Li, W. Fast location and classification of small targets using region segmentation and a convolutional neural network. Comput. Electron. Agric. 2020, 169, 105207. [Google Scholar] [CrossRef]
- Meng, J.; Kang, F.; Wang, Y.; Tong, S.; Zhang, C.; Chen, C. Tea Buds Detection in Complex Background Based on Improved YOLOv7. IEEE Access 2023, 11, 88295–88304. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, W.; Yu, J.; Hei, L.; Chen, J.; He, Y. Complete and accurate holly fruits counting using YOLOX object detection. Comput. Electron. Agric. 2022, 198, 107062. [Google Scholar] [CrossRef]
- Zhang, H.; Ji, S.; Shao, M.; Pu, H.; Zhang, L. Non-destructive Internal Defect Detection of In-Shell Walnuts by X-ray Technology Based on Improved Faster R-CNN. Appl. Sci. 2023, 13, 7311. [Google Scholar] [CrossRef]
- Wang, D.; Dai, D.; Zheng, J.; Li, L.; Kang, H.; Zheng, X. WT-YOLOM: An Improved Target Detection Model Based on YOLOv4 for Endogenous Impurity in Walnuts. Agronomy 2023, 13, 1462. [Google Scholar] [CrossRef]
- Zhang, G.; Liu, S.; Wang, F.; Li, Z.; Sun, J. YOLOX: Exceeding YOLO Series in 2021. arXiv 2021, arXiv:2107.08430. [Google Scholar]
- Shen, C.; Ma, C.; Gao, W. Multiple Attention Mechanism Enhanced YOLOX for Remote Sensing Object Detection. Sensors 2023, 23, 1261. [Google Scholar] [CrossRef]
- Shang, Y.; Zhang, Q.; Song, H. Application of deep learning based on YOLOv5s to apple flower detection in natural scenes. Trans. Chin. Soc. Agric. Eng. 2022, 38, 222–229. [Google Scholar]
- Yang, Z.; Zhao, C.; Maeda, H.; Sekimoto, Y. Development of a Large-Scale Roadside Facility Detection Model Based on the Mapillary Dataset. Sensors 2022, 22, 9992. [Google Scholar] [CrossRef] [PubMed]
- Chang, Y.; Zhang, Y. Deep Learning for Clothing Style Recognition Using YOLOv5. Micromachines 2022, 13, 1678. [Google Scholar] [CrossRef]
- Huang, G. A Comparative study of underwater marine products detection based on YOLOv5 and underwater image enhancement. Int. J. Eng. 2021, 7, 213–221. [Google Scholar]
- Song, X.; Wu, Y.; Liu, B.; Zhang, Q. Improved YOLOv5s Algorithm for Helmet Wearing Detection. Comput. Eng. Appl. 2023, 59, 176–183. [Google Scholar]
- Liu, J. Research and Software Design of Transmission Line Foreign Objects Detection Algorithm Based on YOLOX. Master’s Thesis, China University of Mining and Technology, Xuzhou, China, 2022. [Google Scholar]
- Zhao, Y.; Han, R.; Rao, Y. A New Feature Pyramid Network for Object Detection. In Proceedings of the 2019 International Conference on Virtual Reality and Intelligent Systems, Hunan, China, 14 September 2019. [Google Scholar]
- Yu, L.; Qian, M.; Chen, Q.; Sun, F.; Pan, J. An Improved YOLOv5 Model: Application to Mixed Impurities Detection for Walnut Kernels. Foods 2023, 12, 624. [Google Scholar] [CrossRef]
- Pham, V.; Nguyen, N.; Pham, V. A Novel Approach to Cashew Nut Detection in Packaging and Quality Inspection Lines. Int. J. Adv. Comput. Sci. Appl. (IJACSA) 2022, 13, 356–361. [Google Scholar] [CrossRef]
- Ma, L.; Ma, J.; Han, J.; Li, Y. Research on target detection algorithm based on YOLOv5s. Comput. Knowl. Technol. 2021, 17, 100–103. [Google Scholar]
- Rajevenceltha, J.; Gaidhane, V. An efficient approach for no-reference image quality assessment based on statistical texture and structural features. Eng. Sci. Technol. 2022, 30, 101039. [Google Scholar] [CrossRef]
- Rajevenceltha, J.; Gaidhane, H. A novel approach for image focus measure. Signal Image Video Process. 2020, 15, 547–555. [Google Scholar] [CrossRef]
- Al, N.; Gaidhane, V.H.; Rajevenceltha, J. Image Focus Measure Based on Polynomial Coefficients and Reduced Gerschgorin Circle Approach. IETE Tech. Rev. 2023. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Model Size/MB | FLOPs | AP50(%) | AP75(%) | APs(%) | AR(%) |
|---|---|---|---|---|---|---|
| YOLOX | 99 | 351.9 | 96.3 | 92.4 | 80.6 | 84.7 |
| YOLOv3 | 61.53 | 193.87 | 94.2 | 83.7 | 68.5 | 74.7 |
| Faster-RCNN | 98.85 | 427.07 | 95 | 89.1 | 76.7 | 82.4 |
| SSD | 3.04 | 7.02 | 92.9 | 82.6 | 70.9 | 75.7 |
| Algorithm | Considered Factors | Sample Condition | AP50 (%) | APs (%) | AR (%) |
|---|---|---|---|---|---|
| YOLOX | Walnut species | Wen 185 | 96.8 | 80.9 | 84.8 |
| Yunnan Juglans sigillata | 95.7 | 76.3 | 80.5 | ||
| Light source | Supplementary light | 95.7 | 75.5 | 79.8 | |
| Natural light | 95.9 | 81.3 | 85.2 | ||
| Shielding condition | With mutual shielding | 95.8 | 78.1 | 82.0 | |
| Without shielding | 96.4 | 79.8 | 83.7 | ||
| YOLOv3 | walnut species | Wen 185 | 95.2 | 70.0 | 75.7 |
| Yunnan Juglans sigillata | 94.1 | 65.2 | 71.8 | ||
| Light source | Supplementary light | 94.2 | 64.6 | 71.4 | |
| Natural light | 95.0 | 70.4 | 75.9 | ||
| Shielding condition | With mutual shielding | 94.5 | 65.6 | 71.6 | |
| Without shielding | 95.8 | 71.2 | 76.6 | ||
| Faster -RCNN | Walnut species | Wen 185 | 95.4 | 79.3 | 84.3 |
| Yunnan Juglans sigillata | 95.6 | 74.3 | 80.1 | ||
| Light source | Supplementary light | 95.3 | 73.5 | 79.6 | |
| Natural light | 95.7 | 79.7 | 84.6 | ||
| Shielding condition | With mutual shielding | 95.7 | 75.7 | 81.2 | |
| Without shielding | 96.4 | 78.8 | 83.8 | ||
| SSD | walnut species | Wen 185 | 94.2 | 72.0 | 76.7 |
| Yunnan Juglans sigillata | 92.9 | 67.3 | 72.7 | ||
| Light source | Supplementary light | 93.0 | 67.0 | 72.4 | |
| Natural light | 93.6 | 72.0 | 76.5 | ||
| Shielding condition | With mutual shielding | 92.8 | 67.1 | 71.9 | |
| Without shielding | 96.4 | 78.8 | 83.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Wang, X.; Liu, Y.; Li, Z.; Lan, H.; Zhang, Z.; Ma, J. Machine Vision-Based Chinese Walnut Shell–Kernel Recognition and Separation. Appl. Sci. 2023, 13, 10685. https://doi.org/10.3390/app131910685
Zhang Y, Wang X, Liu Y, Li Z, Lan H, Zhang Z, Ma J. Machine Vision-Based Chinese Walnut Shell–Kernel Recognition and Separation. Applied Sciences. 2023; 13(19):10685. https://doi.org/10.3390/app131910685
Chicago/Turabian StyleZhang, Yongcheng, Xingyu Wang, Yang Liu, Zhanbiao Li, Haipeng Lan, Zhaoguo Zhang, and Jiale Ma. 2023. "Machine Vision-Based Chinese Walnut Shell–Kernel Recognition and Separation" Applied Sciences 13, no. 19: 10685. https://doi.org/10.3390/app131910685