
Leveling Control of Hillside Tractor Body Based on Fuzzy Sliding Mode Variable Structure

Abstract
:Featured Application
Abstract
1. Introduction
2. Leveling System Design and Control Strategy
2.1. Leveling System Design
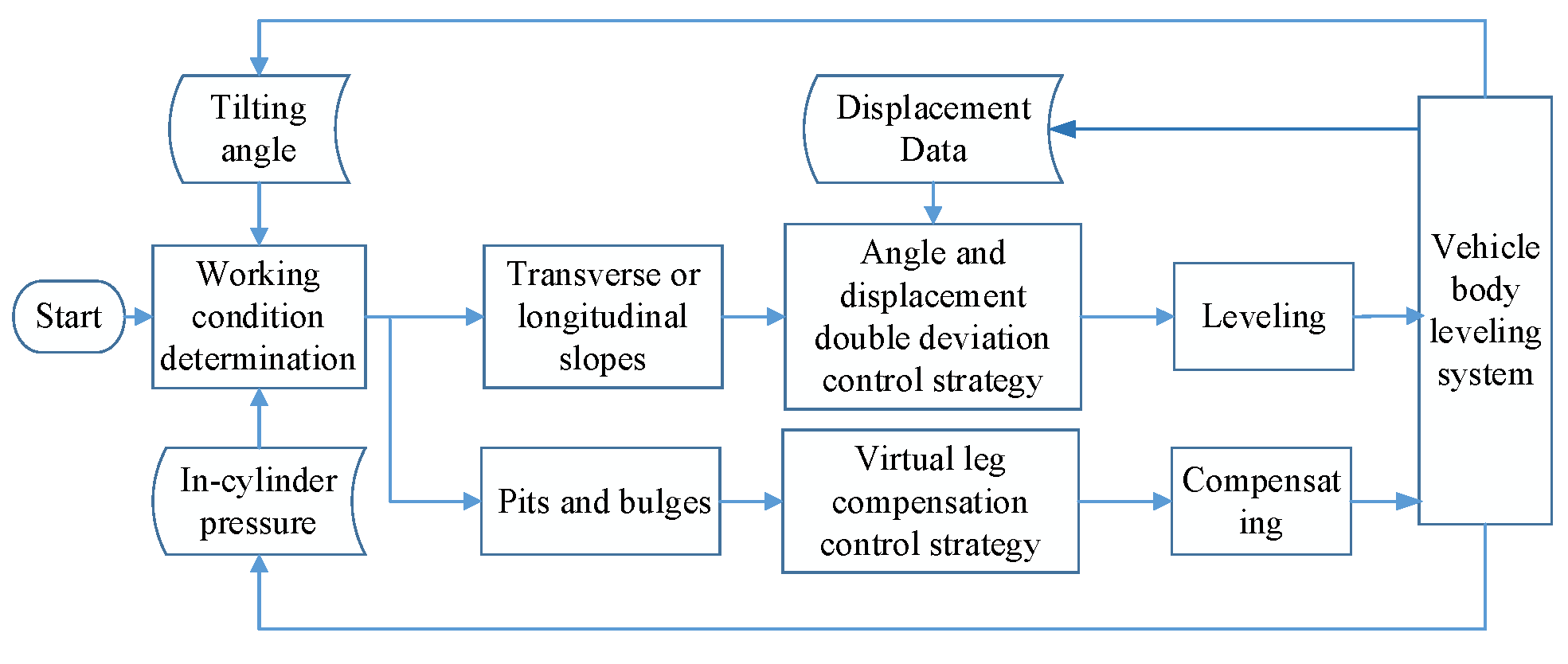
2.2. Leveling Control Strategy
3. Leveling System Model and Controller Design
3.1. Construction of Mathematical Model of Body Leveling Hydraulic System
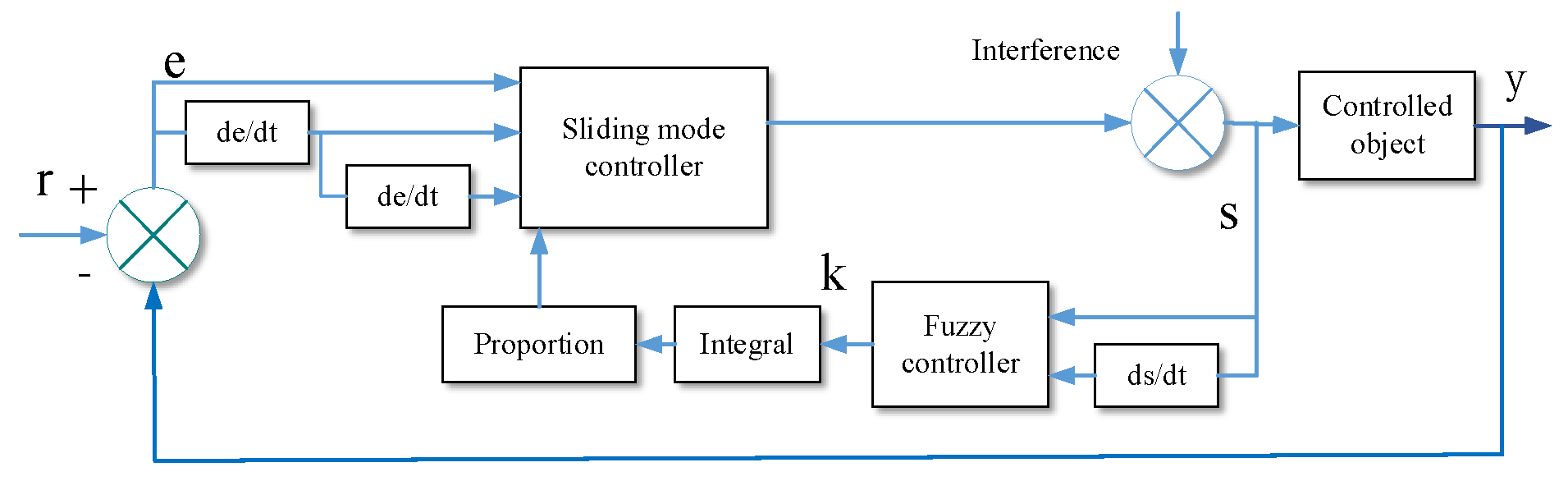
3.2. Design of Fuzzy Sliding Mode Variable Structure Controller
3.2.1. Sliding Mode Controller Design
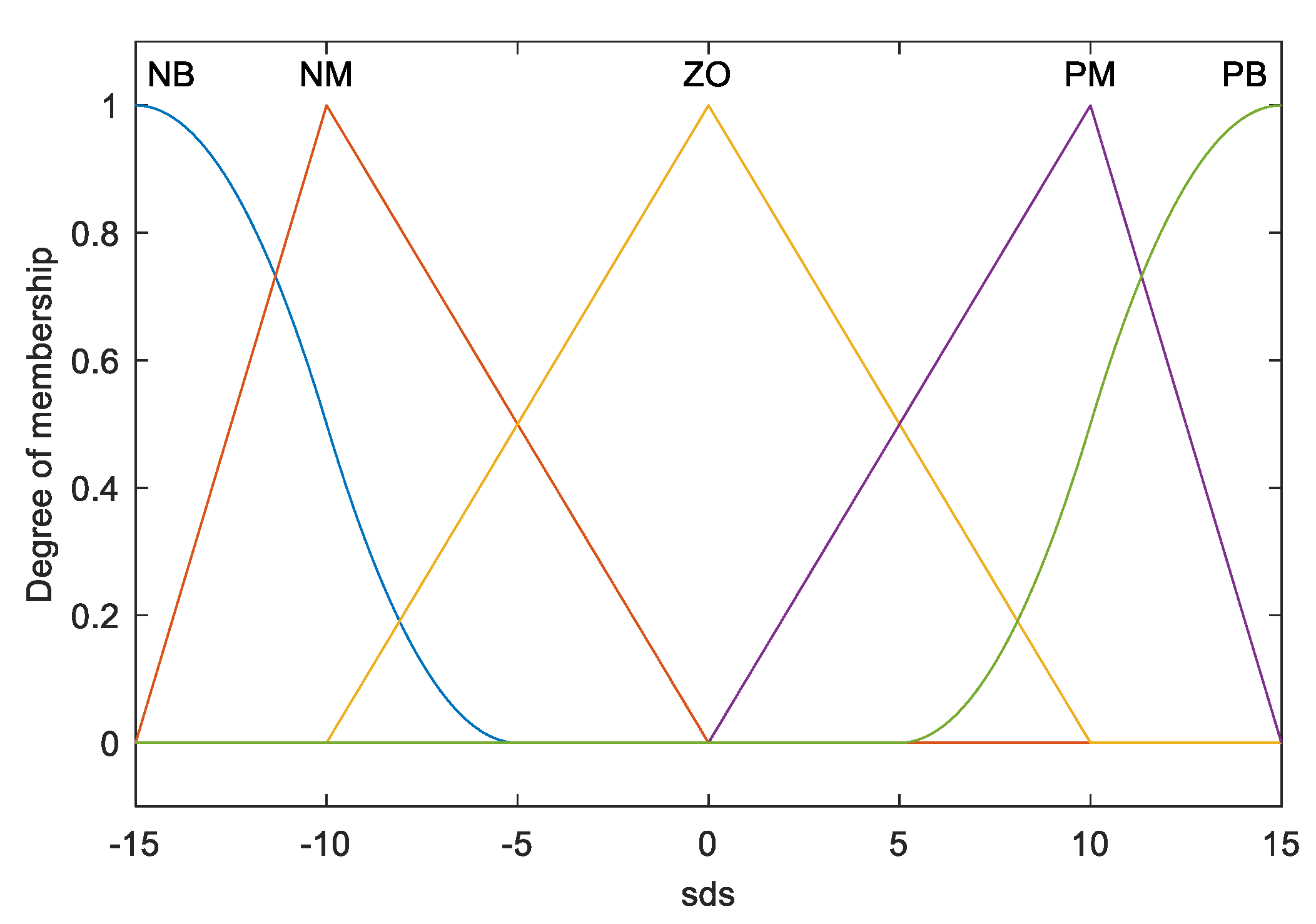
3.2.2. Fuzzy Rule Design
4. Simulation Analysis
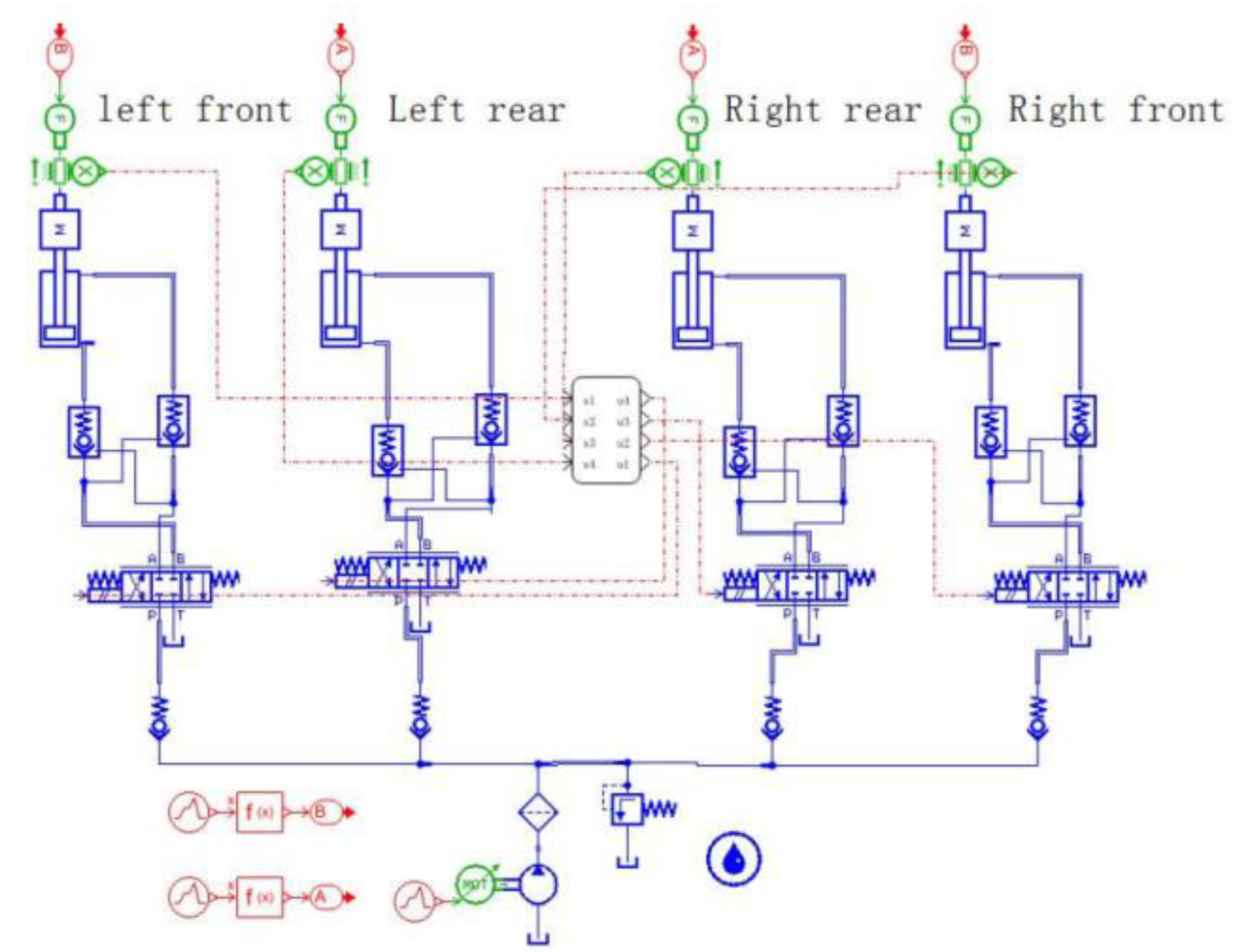
4.1. AMEsim Hydraulic System Model Building
4.2. Simulink Controller Model Construction
4.3. Simulation Result Analysis
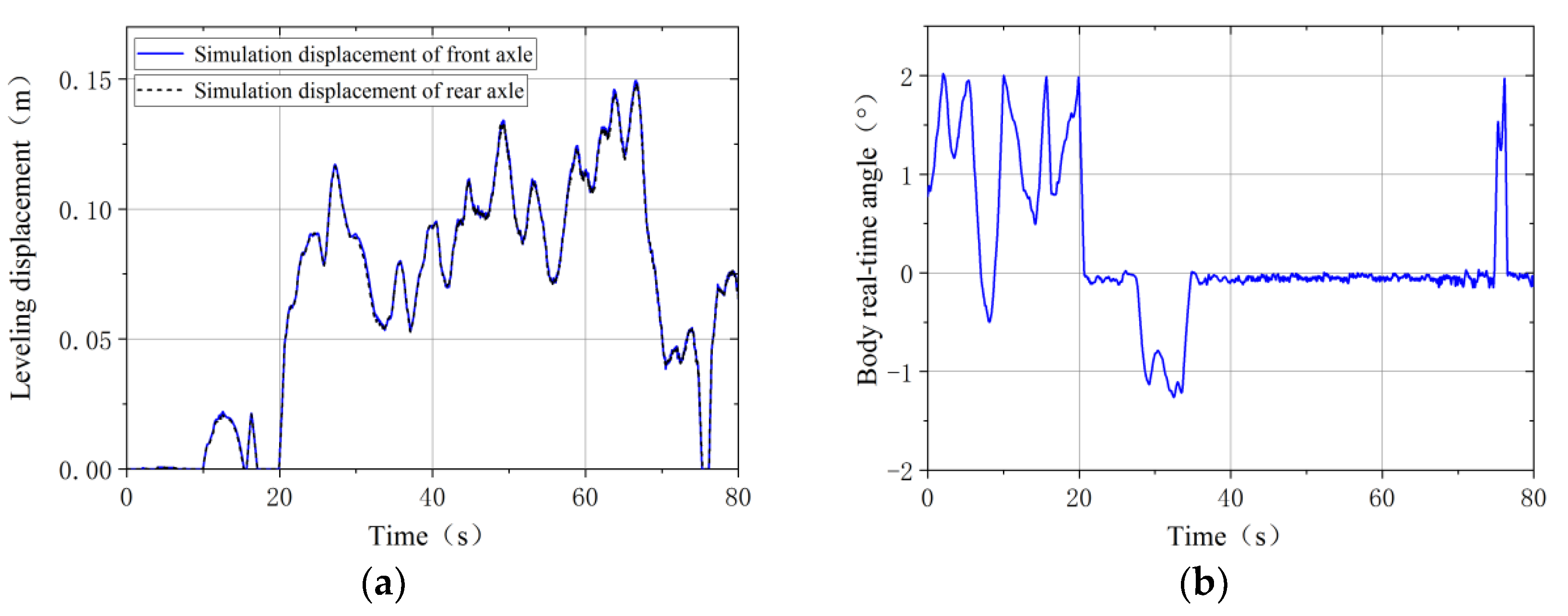
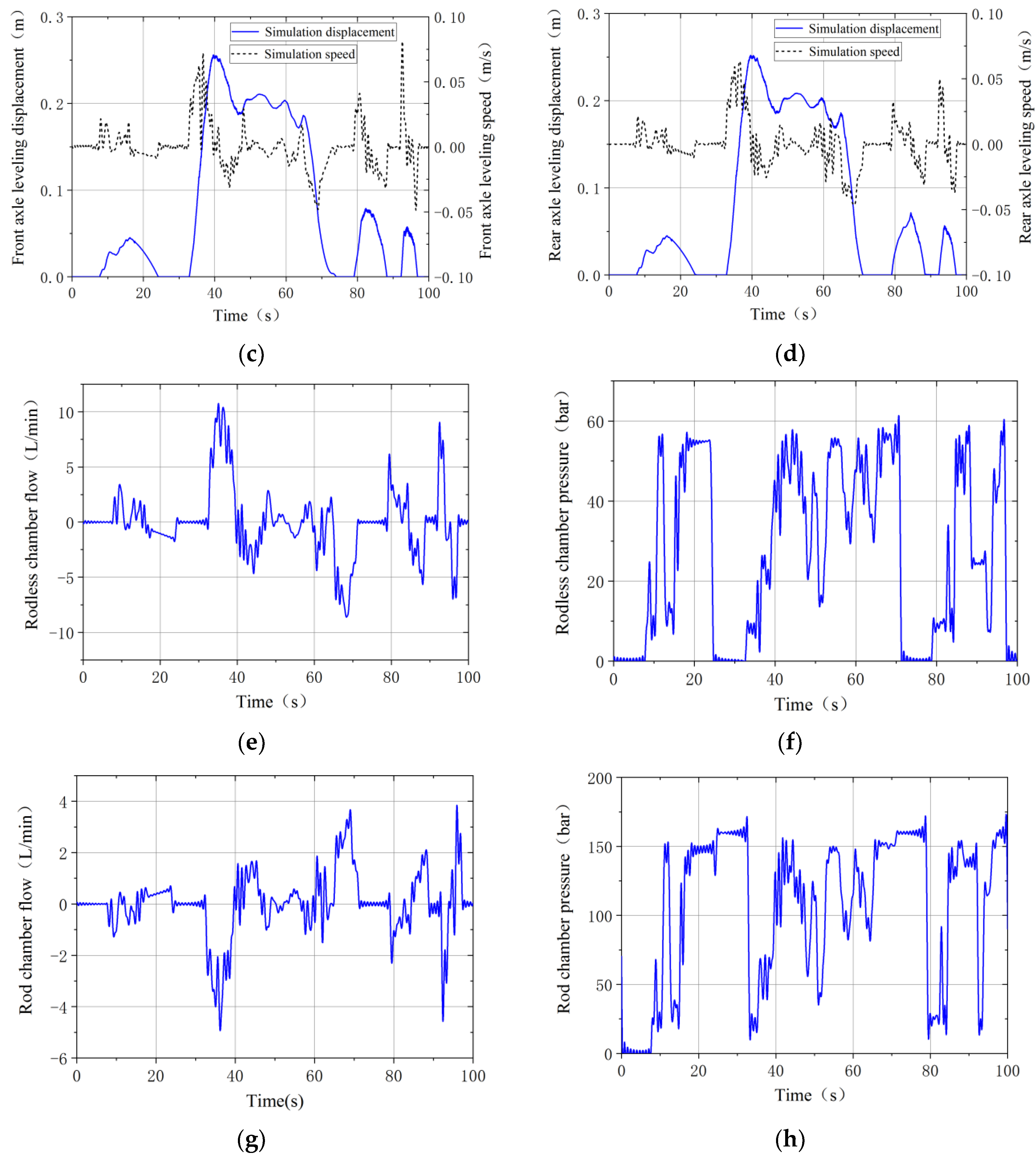
4.3.1. Simulation Analysis of Spectrum Excited Leveling of Gravel Pavement with Transverse Slopes
4.3.2. Simulation Analysis of Spectrum Excited Leveling of Transverse Slope Field Paths
5. Test Analysis
5.1. Composition of Auto-Leveling Test Bench
5.2. Auto-Leveling Tests
5.3. Data Analysis of Auto-Leveling Tests
5.3.1. Simulation Analysis of Spectrum Excited Leveling of Gravel Pavement with Transverse Slopes
5.3.2. Analysis of Horizontal Slope Field Spectrum Excitation Leveling Tests
6. Conclusions
- (1)
- The proposed vehicle body leveling control system, which employs a fuzzy sliding mode variable structure control algorithm designed and built according to the functional requirements of the leveling system, is capable of real-time adjustment of controller parameters, guaranteeing a vehicle leveling effect.
- (2)
- Data curves produced by measurements of front and rear axle leveling displacement, speed, flow, pressure, and body tilting angle during the tractor leveling process obtained through AMEsim/Simulink simulation reveal that the tractor has a good leveling effect under complex working conditions in hilly and mountainous areas. The tilting angle of the tractor is kept within a ±2° range during the leveling process and can return to 0° after leveling, indicating good dynamic stability.
- (3)
- The proposed control method was used to carry out functional tests on an auto-leveling test bench, with the results confirming the correctness, accuracy, and reliability of the vehicle body auto-leveling control system and fuzzy sliding mode variable structure control algorithm. The test-confirmed results obtained in this study provide a theoretical basis for the design of auto-leveling control systems for hillside tractors.
- (4)
- The tractor body leveling control of the sliding mode variable structure control algorithm, based on fuzzy switching gain adjustment, still exhibits some chattering and a singularity under an excitation signal with a large variation amplitude. Therefore, the control parameters can be optimized to further improve the body leveling response speed and control accuracy. Owing to the incomplete consideration of the influencing factors and parameters during the modeling process, a certain error is presented in the actual condition of the tractor leveling. If the actual model of the tractor can be used for the simulation in the follow-up study, the error of the electromechanical-hydraulic joint simulation can be reduced further.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhou, X.S.; Ma, W.L. Agricultural mechanization and land productivity in China. Int. J. Sustain. Dev. World Ecol. 2022, 29, 530–542. [Google Scholar] [CrossRef]
- Wang, S.; Sun, Y.Y.; Yang, C. Comparative Static Analysis on the Agricultural Mechanization Development Levels in China’s Provincial Areas. Processes 2022, 10, 1332. [Google Scholar] [CrossRef]
- Sun, J.B.; Liu, Z.J.; Yang, F.Z.; Sun, Q.; Liu, Q.; Luo, P.X. Summarization of key technologies of agricultural equipment and slope operation in hilly and mountainous areas. Agric. Mach. J. 2023, 1–18. [Google Scholar]
- Li, Y.L. Research and Design of Attitude Leveling Control System for Mountain Tracked Tractor. Master’s Thesis, Northwest A&F University, Xianyang, China, 2020. [Google Scholar]
- Sun, J.; Meng, C.; Zhang, Y.; Chu, G.; Zhang, Y.; Yang, F.; Liu, Z. Design and physical model experiment of an attitude adjustment device for a crawler tractor in hilly and mountainous regions. Inf. Process. Agric. 2020, 7, 466–478. [Google Scholar] [CrossRef]
- Pijuan, J.; Comellas, M.; Nogués, M.; Roca, J.; Potau, X. Active bogies and chassis levelling for a vehicle operating in rough terrain. J. Terramech. 2012, 49, 161–171. [Google Scholar] [CrossRef]
- Xie, Y.M.; Alleyne, A. Two Degree of Freedom Control Synthesis with Applications to Agricultural Systems. J. Dyn. Syst. Meas. Control 2014, 136, 051006. [Google Scholar] [CrossRef]
- Wang, T. Design and Test of Automatic Leveling Control System for Mountain Tractor Body. Master’s Thesis, Northwest Agriculture and Forestry University, Department of Agricultural Electrification and Automation, Xianyang, China, 2014. [Google Scholar]
- Xu, F.; Li, G.Y.; Gao, M.Y.; Zhang, Y.S.; Meng, C.Y.; Sun, Z.; Zhang, L.; Zhang, H.S.; Li, L.L. Design of leveling control system for mountain tractor body. Agric. Technol. 2019, 37, 59–61. [Google Scholar]
- Qi, W.C.; Li, Y.M.; Tao, J.F.; Qin, C.J.; Liu, C.L.; Zhong, K. Design and experiment of active attitude adjustment system for tractors in hilly and mountainous areas. J. Agric. Mach. 2019, 50, 381–388. [Google Scholar]
- Peng, H.; Ma, W.X.; Zhao, E.P.; Lu, X.Q.; Feng, X. Design and physical model experimental of leveling system in hillside wheeled tractor body. J. Agric. Eng. 2018, 14, 28–37. [Google Scholar]
- Peng, H.; Ma, W.X.; Wang, Z.S.; Liu, C.B.; Huang, J.; Zhao, E.P. Simulation analysis and test of vehicle body leveling control for tractors in hilly and mountainous areas. J. Jilin Univ. 2019, 49, 157–165. [Google Scholar]
- Wang, Z.S.; Ma, W.X.; Wang, T.J.; Liu, C.B. Body Leveling Control Model Establishment and Experiment Analysis. Appl. Eng. Agric. 2022, 38, 243–251. [Google Scholar] [CrossRef]
- Ahmad, S.; Uppal, A.A.; Azam, M.R.; Iqbal, J. Chattering Free Sliding Mode Control and State Dependent Kalman Filter Design for Underground Gasification Energy Conversion Process. Electronics 2023, 12, 876. [Google Scholar] [CrossRef]
- Incremona, G.P.; Strada, S.C.; Tanelli, M.; Ferrara, A. Switched adaptation strategies for integral sliding mode control: Theory and application. Int. J. Robust Nonlinear Control 2019, 17, 6064–6080. [Google Scholar] [CrossRef]
- Zhang, X.; Guo, J.W. Joint simulation of control algorithm for leveling hydraulic system of precision leveling vehicle based on MATLAB/AMESim. J. Chang. Univ. Technol. 2021, 18, 89–99+117. [Google Scholar]
- Mu, C.P. Research on Deep Tillage Control Technology of Large Tractor Electro Hydraulic Suspension System. Master’s Thesis, Shandong University of Science and Technology, Department of Mechanical and Electronic Engineering, Qingdao, China, 2020. [Google Scholar]
- Anjum, M.B.; Khan, Q.; Ullah, S.; Hafeez, G.; Fida, A.; Iqbal, J.; Albogamy, F.R. Maximum Power Extraction from a Standalone Photo Voltaic System via Neuro-Adaptive Arbitrary Order Sliding Mode Control Strategy with High Gain Differentiation. Appl. Sci. 2022, 12, 2273. [Google Scholar] [CrossRef]
- Chand, A.; Khan, Q.; Alam, W.; Khan, L.; Iqbal, J. Certainty equivalence-based robust sliding mode control strategy and its application to uncertain PMSG-WECS. PLoS ONE 2023, 18, e0281116. [Google Scholar] [CrossRef]
- Xiao, X.Q. Research on Fuzzy Sliding Mode Variable Structure Control of Hydraulic Servo System. Sci. Technol. Innov. 2021, 18–20. [Google Scholar]
- Ding, S.G.; Han, J.Y. Research on Electro hydraulic Servo System Based on Fuzzy Sliding Mode Control. Modul. Mach. Tool Autom. Mach. Technol. 2017, 110–112. [Google Scholar]
- Chen, Y.; Ma, Y.; Chen, H. State of charge and state of health estimation for lithium-ion battery through dual sliding mode observer based on AMESim-Simulink co-simulation. J. Renew. Sustain. Energy 2018, 10, 034103. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.P.; Li, G.P.; Yang, S.W.; Chen, H.; Dong, Q.C. Research on synchronous control method of dual hydraulic system of beam conveyor based on AMESim and Simulink co-simulation. Hydraul. Pneum. Seals 2022, 42, 7–13. [Google Scholar]
- Wang, D.W.; Yi, C.; Li, C.F.; Jiang, J.H. Research on Fuzzy PID Control of Direct Drive Volume Control System Based on AMESim Simulink Joint Simulation. Mach. Tools Hydraul. 2021, 49, 7–12. [Google Scholar]
- Huang, J.; Wang, Z.S.; Ma, W.X.; Lu, X.Q. Measurement and analysis of tractor working surface spectrum. Tract. Agric. Veh. 2018, 45, 20–24. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | ||
|---|---|---|
| 1 | PB | PB |
| 2 | PM | PM |
| 3 | ZO | ZO |
| 4 | NM | NM |
| 5 | NB | NB |
| Parameter | Value | |
|---|---|---|
| 1 | Front axle hydraulic cylinder stroke | 286 mm |
| 2 | Rear axle hydraulic cylinder stroke | 281 mm |
| 3 | Pump | 14.6 mL/r 2000 r/min |
| 4 | The minimum used mass of the vehicle body | 1260 kg |
| 5 | Mass distribution ratio (front: rear) | 4:6 |
| 6 | Piston diameter | 63 mm |
| 7 | Oil density | 880 kg/m3 (40°) |
| 8 | Electro-hydraulic proportional directional valve | 25 MPa 43 L/min |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, H.; Ma, W.; Wang, Z.; Yuan, Z. Leveling Control of Hillside Tractor Body Based on Fuzzy Sliding Mode Variable Structure. Appl. Sci. 2023, 13, 6066. https://doi.org/10.3390/app13106066
Peng H, Ma W, Wang Z, Yuan Z. Leveling Control of Hillside Tractor Body Based on Fuzzy Sliding Mode Variable Structure. Applied Sciences. 2023; 13(10):6066. https://doi.org/10.3390/app13106066
Chicago/Turabian StylePeng, He, Wenxing Ma, Zhongshan Wang, and Zhe Yuan. 2023. "Leveling Control of Hillside Tractor Body Based on Fuzzy Sliding Mode Variable Structure" Applied Sciences 13, no. 10: 6066. https://doi.org/10.3390/app13106066