1. Introduction
With the rapid development of sensing, computing, and communicating technologies, intelligent devices equipped with multifarious sensors, for example, mobile phones, iPads, and wearable devices have already played a crucial role in human life, which makes the people who take these intelligent devices to become powerful sensing nodes [
1,
2,
3]. The inherent mobility nature of people has empowered and inspired the people to take part in ubiquitous sensing, and the rich sensing capabilities of sensor-enhanced devices make pervasive computing possible, which stimulates the emergence and promotes the development of an appealing paradigm named Mobile CrowdSensing (MCS) [
4]. MCS enables and inspires a vast number of people to sense and contribute data; therefore, it has become a convenient method for many Internet of Things (IoT) applications, such as smart cities [
5,
6,
7], environmental monitoring [
8,
9,
10,
11,
12], smart transportation [
13,
14] and intelligent medicine [
15,
16], which improves work efficiency and quality of our life.
Compared with traditional sensing technology, the core idea of MCS is to utilize people’s mobility and recruit people with intelligent devices to meet the requirements and complete sensing tasks. There is no need to deploy massive static nodes in the sensing areas, which can largely reduce installation costs [
17]. Moreover, the widespread popularity of intelligent devices can provide strong guarantees for spatial coverage and task completion quality, even when facing emergencies and unpredictable tasks. Meanwhile, the outstanding computing capabilities of mobile devices can conduct the computation for the cloud platform, which has been widely used in many real-time scenarios, such as autonomous driving [
18,
19,
20]. However, the inadequate resources of mobile devices are unable to execute the complex computation of large amounts of real-time information, which would lead to the latency of data and information propagation [
21]. To address the issues, some researchers introduced Edge Computing into the MCS system, whose basic idea is to add edge nodes, such as smart lampposts [
22,
23] and base stations [
24], with sufficient energy, excellent storage, and computing capabilities at the edge of the network. So sensing data are computed and processed by the closest edge nodes instead of the cloud platform, which is promising to effectively reduce the time delays and computational complexity in cloud platforms. However, how to take full advantage of the edge nodes more reasonably has aroused great interest from researchers [
25,
26].
Although MCS is an appealing sensing paradigm and shows great potential, it has raised plenty of challenging issues, for example, user recruitment algorithms [
27,
28], incentive mechanisms [
29,
30], task allocations [
31,
32,
33], and data fusion [
34,
35]. As one of the most vital challenges in MCS, the user recruitment algorithm refers to the problem of how to recruit appropriate participants from extensive potential users to meet the various requirements and complete the tasks under some constraints [
36]. More and more researchers have devoted plenty of effort to finding optimal methods to solve this problem by comprehensively considering various factors. In [
37], Wu D et al. jointly considered the effects of users’ willingness, reputation, and activity, then proposed a user characteristics aware participant selection (UCPS) mechanism to improve the task completion rate and ensure the quality of sensing data in different regions. The results showed that the mechanism could improve the task completion rate and data quality. However, they ignored the situation of potential users in the task area. Taking into account the requirements of both quantity and quality of users’ participation, Li Q et al. introduced the reputation evaluation model and proposed a crowdsensing task selection algorithm to encourage participants to make the greatest contributions [
38]. Experimental results indicated that the method could effectively ensure the quantity and the quality of users’ participation. However, the complex computation would lead to time delays and information propagation. To guarantee the coverage quality of the tasks, from the perspective of the tasks, authors in [
39] focused on the task attributes, and divided the whole sensing region by a weighted Voronoi diagram, then proposed a novel willingness-aware user recruitment strategy (WAUR) for MCS. Simulations revealed that the approach could significantly improve the performance compared with other algorithms. While these studies above integrated and interweaved many different variables, however, they ignored the most important part of MCS—the uncertainty of mobile users. The users’ random mobility and uneven distribution could not enable the cloud platform to have enough users to perform the tasks, but also would bring about a shortage of users for the tasks when facing emergencies and unpredictable tasks, which leads to an unnecessary accuracy loss. More seriously, some users may upload fake data for compensation which would critically decrease the quality of tasks. Furthermore, although numerous mobile devices can replace traditional sensors, the instability and uncertainty of these mobile users may affect the completion and quality of tasks. Selecting reliable users and completing tasks more effectively has become a huge challenge in MCS.
Hence, to avoid the fraud of users and ensure the task coverage quality and improve the task completion rate, by jointly considering the user reputation and edge computing, we present a reputation-based collaborative user recruitment algorithm (RCUR) for edge-aided Mobile Crowdsensing with the goal of improving the completion rate and maximizing the spatial coverage of tasks under temporal and budget constraints. The main contributions of our work are summarized as follows:
- (1)
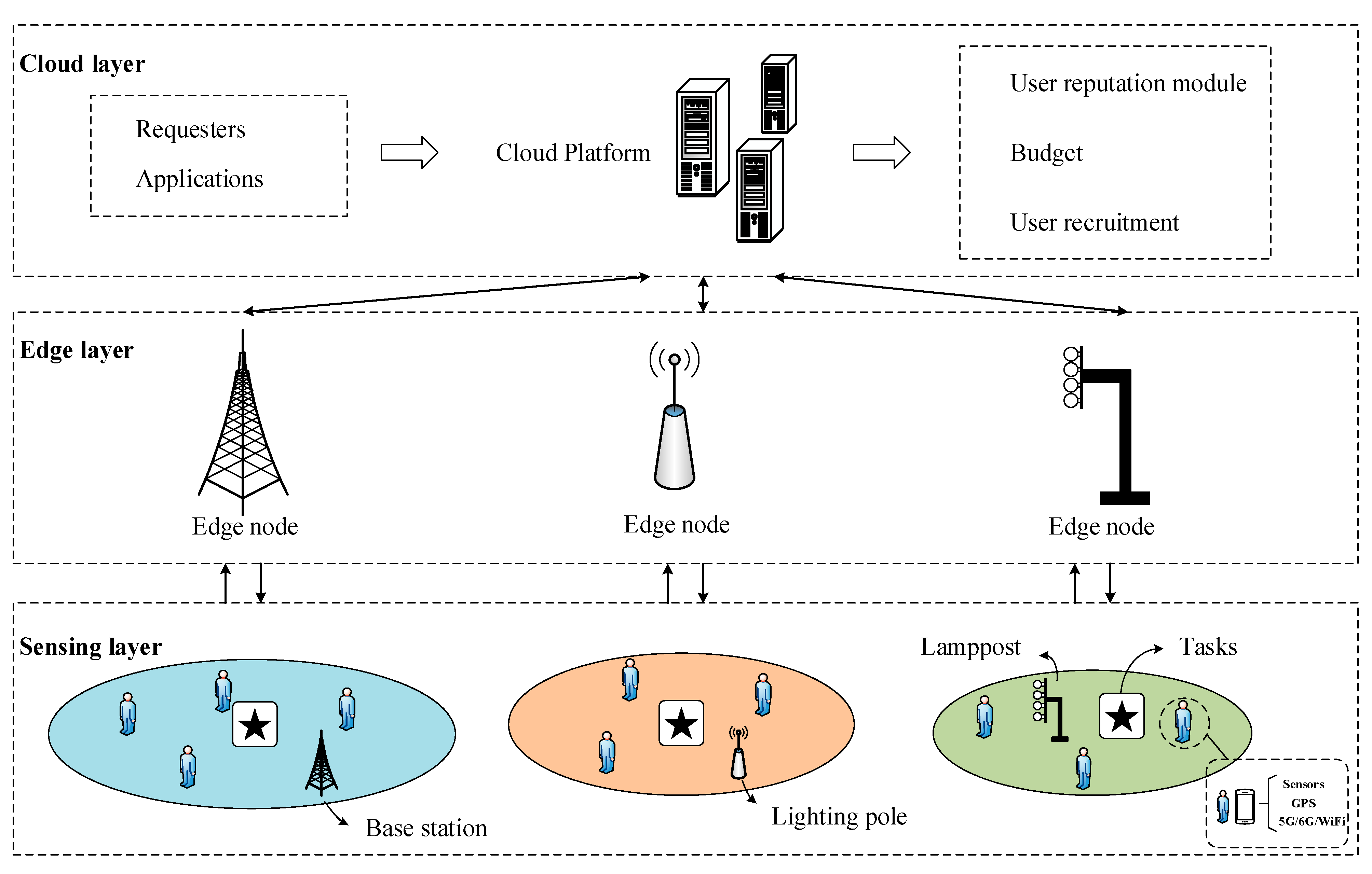
Existing MCS systems in urban scenarios suffer from high delay and limited storage space, which negatively affect task completion rate and spatial coverage. To address these issues, we introduce edge computing into MCS and develop an edge-aided MCS system in urban scenarios. Our system adds an edge layer that efficiently handles the computing pressure and storage needs while leveraging the powerful sensing abilities of edge nodes. Moreover, the user recruitment problem is formulated with spatial and budget constraints to improve completion rates and maximize spatial coverage.
- (2)
Prior methods for user selection in MCS systems fail to consider user reliability and credibility adequately. To address this gap, we establish a user reputation module to evaluate the user’s past reputation score based on previous performance. Then we jointly consider the distance and coverage ability of the user to calculate the instantaneous reputation score, which is combined with the user’s past reputation score to generate an overall reputation equation. Our cloud platform selects the proper users according to their reputation scores to complete the tasks efficiently and qualitatively.
- (3)
In order to achieve a better task completion rate and maximum spatial coverage, we propose a reputation-based collaborative user recruitment algorithm (RCUR) in an edge-aided Mobile CrowdSensing system under certain budgets. Our innovative approach leverages the user reputation method to identify suitable participants who can guarantee the coverage quality of the tasks. Additionally, we use collaborative sensing to select the edge nodes to finish the tasks and ensure coverage when lacking potential users. Moreover, we design a greedy method to recruit the optimal participant for each task. Our simulations and experimental results verify that our proposed RCUR algorithm is outstanding compared with other methods in terms of task completion rate and spatial coverage.
The rest of the paper is organized as follows. In
Section 2, we review and summarize related work.
Section 3 presents our system model and problem formulation. In
Section 4, we propose a reputation-based collaborative user recruitment algorithm (RCUR) under budget constraints. Simulation results compared with other methods are shown in
Section 5. Finally, we conclude our work in
Section 6.
2. Related Work
Recently, user recruitment algorithms have attracted the attention of many scholars, who have proposed extensive promising studies in MCS systems. Most of them are devoted to finding the optimal solutions to recruit the most appropriate participant to complete the tasks. Guo B et al. [
40] focused on data diversity and proposed a unified visual crowdsensing framework called UtiPay based on the microscopic and macroscopic visual task types to improve the quality of group sensing data. In [
41], to complete the task with the minimum cost, Zhou et al. defined the “t-sweep k-coverage” crowdsensing tasks and designed a user recruitment algorithm based on the theory of greedy strategy. After simulation experiments on real data sets, the superiority and effectiveness of this method were proved. Wang et al. [
42] fully exploited the content information together with the context information to model workers’ preferences on tasks accurately. Then they proposed a novel personalized task-oriented worker recruitment mechanism for mobile crowdsensing based on a careful characterization of workers’ preferences.
One of the most important challenges in MCS is the coverage quality for some applications. Especially in urban scenarios, coverage has become one of the criteria to measure the completion quality of tasks. In [
43], Zhang et al. proposed a novel user recruitment that only selected a subset of mobile participants to achieve the maximum spatial coverage with a constrained budget. The results revealed that the algorithm achieved a near-optimal solution compared with the brute-force search results. However, this method would spend too much running time and cost a lot for the platform. Alagha A et al. [
44] jointly considered the parameters, such as user localization, mobility traces, and reputation, to design a two-steps novel Stable Data-based Recruitment System (SDRS) for localization tasks. Meanwhile, they took into account the range-free sensors and the mobility of workers to improve the coverage quality of tasks. The results indicated that the proposed method could attain a speedy localization with better quality compared with other benchmarks. Yucel F et al. [
45] tried to tackle the issues of finding task assignments that could make the optimal tradeoff between coverage-aware preferences of service requesters and profit-based preferences of workers under the budget constraints in MCS. The simulations showed that the proposed algorithms mostly provided substantially better task assignments in terms of user happiness and coverage quality.
With the continuous development and maturity of edge computing technology, to further improve the task completion rate and reduce the load of the cloud platform, many researchers have introduced edge computing into MCS. Ma L et al. [
46] proposed two privacy-preserving reputation management schemes for edge computing enhanced MCS to preserve privacy and deal with malicious participants simultaneously. The experiments demonstrated that both schemes achieved high-cost efficiency. In [
47], Zhang Y et al. studied dynamic user recruitment under the scenarios for different sensing tasks. For the long-duration task and short-duration tasks, they presented two different user recruitment algorithms with edge-aided MobileCrowdsensing. The experiments showed the proposed user recruitment could achieve better validity and reliability. To solve the problem that user recruitment failed to effectively address the task requirements or the relevant maximization and diversification, Xiong J et al. [
48] designed a task-oriented user selection incentive mechanism (TRIM) in an effort toward a task-centered design framework in edge-aided MCS. The simulation results indicated that TRIM could achieve feasible and efficient user selection.
However, the previous works have presented outstanding simulation results, and there are several shortcomings related to user recruitment in mobile crowdsensing (MCS) systems. Many studies focus on finding optimal solutions to recruit appropriate participants to complete tasks but do not consider the suitability of users’ characteristics or the potential of edge computing resources. Users’ historical performance usually indicates enthusiasm and reliability for the tasks, which will directly affect the completion and coverage quality. Some studies aim to improve coverage quality in urban scenarios, but their methods are time-consuming or costly. Others introduce edge computing but do not fully utilize its sensing and communicating capabilities. They ignore the abundant resources such as sensing, and communicating capabilities, which can also be used as a powerful static sensing node. Hence, the edge-aided MCS has significant potential space to improve the flexibility and efficiency of the MCS system. To address all aforementioned issues, we propose an edge-aided MCS system in urban scenarios with a user reputation module to evaluate historical performance and a reputation-based collaborative user recruitment algorithm (RCUR) that efficiently improves task completion rate and achieves optimal coverage under budget constraints, which is promising in addressing the identified shortcomings and utilizing the potential of edge computing resources.
4. Reputation-Based Collaborative User Recruitment Algorithm
In this section, we try to analyze the problem of sensing spatial and temporal coverage for tasks of MCS to ensure quality in dynamically changing environments, especially urban scenarios. The quality of the information sensed by users is always the most important parameter to the sensing tasks, which affects excellent quality and provides meaningful guarantees for task completion. Therefore, how to guarantee the task completion rate and meanwhile improve the spatial and temporal coverage rate has raised a new challenge. First, a user reputation module is established to calculate users’ reputation scores based on their historical performance and select the proper users according to their instantaneous reputation scores to complete the tasks efficiently and qualitatively. Then we analyze other recruitment indicators and propose collaborative sensing user recruitment in detail. Finally, we design a reputation-based collaborative user recruitment algorithm to guarantee the task completion rate and maximize the sensing spatial coverage for tasks in MCS.
Table 1 contains the key symbols and interpretations used in the algorithm.
4.1. User Reputation
Intuitively, reputation is a key indicator for tasks to track users’ historical performance and assess the accuracy of these sensing data [
49]. In MCS, because of the users’ random mobility, users can easily choose to participate in different tasks anywhere and at any time. However, when the cloud platform
recruits users for tasks, past reputation scores only represent the users’ previous performance and credibility. There are other parameters that will have an influence on recruiting the appropriate users to complete the tasks, for instance, distance, time limitation, and so on. Therefore, the user reputation score should be comprehensively calculated based on past performance and current characteristics.
In our system, the cloud platform publishes sensing tasks . The detailed information can be described as . Then the cloud platform collects the information of all users and establishes a user reputation module to evaluate the historical performance of the users and calculate their reputation scores, which aims at selecting the proper users and promoting the whole performance on sensing and computing for tasks. With increased participation time, users would have massive records of their historical performance. However, as the former records will diminish values over time, these outdated data will be worthless and no longer reflect the real situation of users at present. Consequently, we should pay more attention to the recent records.
Therefore, we introduce and improve Equation (6) [
37] to estimate the users’ reputation scores based on their past behavior. We give more weight to the last five user records and deduce the user’s
past reputation scores
before time
as follows:
where
denotes the number of tasks completed by user
and
is the score the task
calculates after user
accomplishes it. We comprehensively consider the spatial and temporal coverage for the tasks, so
is defined by
where
denotes the weight coefficients ranging from 0 to 1.
represents the expected sensing coverage area of the task
and
is the coverage area that the user
senses for the task
.
denotes the working time of user
for the task
and
is the sensing duration of the task
. A larger value of
signifies the excellent performance of the user for the task, which also shows higher reliability and credibility.
As we know, when the cloud platform
recruits users for task
, the user reputation module first calculates all the participants’ past reputation scores. Although past reputation scores play an important role in users’ reliability and credibility, the cloud platform will also consider real-time factors, for instance, distance and time limitations. We assume that
denotes the user’s instantaneous reputation score, which is limited by some restrictions, such as the locations and sensing radius. So we can attain the instantaneous reputation score
of user
for task
as follow:
where
is the weight coefficients ranging from 0 to 1.
is the sensing radius of user
, and
represents the coverage radius of task
. So
indicates the coverage ability of user
for task
.
is the distance factor, which can be represented by
where
represents the distance between user
and task
, and
equals to
, which is the maximum distance the users can provide the coverage for the task. Through Equation (8), we know that the instantaneous reputation score
affects whether a user would complete the task with high coverage and quality.
In addition, we consider all the factors to deduce the user
reputation score
equation at time
as follows:
where
represents the balancing parameter ranging from 0 to 1.
4.2. Cost for Tasks
Generally speaking, in MCS, for any sensing tasks, there will be different constraints. For example, air quality sensing needs sensing data in different periods at the same locations, and autonomous driving will arrange the route in advance based on real-time traffic conditions. In order to meet the various requirements of the tasks, we assume that each task in each timeslot will recruit one user to sense and collect data, which can achieve the goal of more effective sensing and maximum coverage.
No matter what kinds of nodes, the mobile users or the edge nodes, the participants who are recruited by the cloud platform execute the whole sensing process and complete the tasks, which would have a cost, such as time and energy loss. Actually, when the users or edge nodes perform the tasks, the longer the execution time is, the more energy will cost. If the tasks need longer sensing time, the users or edge nodes will spend more time and energy executing the tasks. Although participants are volunteers, they will ask for a reward to cover their costs. In our system model, we assume that when each participant acquires the information about task , there will be a cost representing the loss which is proportional to the time they will spend performing the tasks. is the cost of the user for task and represents the sensing cost of the edge node for task . For every task, it will have a reward for the participants to encourage their contributions when they complete the tasks and collect these expected data. is described as the reward of the task .
In order to keep the budget balanced for each task, the cloud platform
will recruit participants whose costs are below the reward of the task. Therefore, we can attain the relationship between the costs of the participants and the tasks as follow:
4.3. Reputation-Based User Recruitment
In our MCS system, we assume that in urban scenarios, there are plentiful mobile users with intelligent devices randomly distributed in the city. They move at a constant speed to roam around the task locations. After the cloud platform publishes the tasks from some applications or the requesters, these mobile users volunteer to take part in these tasks, and they will choose what kinds of tasks to participate in according to the information of the tasks. Hence, for each task , the cloud platform will select the users who are close to the task in time and space and whose costs are less than the reward as the candidates. Then it will form a subset of users for the task and choose the most appropriate user to complete the task.
Then the reputation module will evaluate the performance of the users in and update their past reputation scores . The higher value means that the users have outstanding performance in the previous tasks with higher quality, which leads to a higher possibility of being recruited for the next task. Through Equation (6), we focus on the performance of the last five tasks the user participates in to attain the past reputation score. Additionally, we consider other real-time factors, spatial and temporal constraints. We calculate the user instantaneous reputation score , which is related to locations and sensing radius. Finally, the cloud platform can attain the user reputation score for the task at time .
In order to maximize profits, we propose a Reputation-Based User Recruitment (RBUR). The cloud platform
prefers to recruit users who can complete the tasks efficiently and achieve the maximum coverage qualitatively but require less reward for their costs. Therefore, we establish a fitness function that is based on the user reputation and cost for the task, which is given as follows:
where
represents the balancing parameter ranging from 0 to 1, and
. The fitness function
can provide strong guarantees by adopting the user reputation method with the goal of improving the task completion rate and achieving higher coverage quality, meanwhile maintaining the proper tradeoff between the cost to the user and the reward of the task.
4.4. Collaborative Sensing Method
Random movement by the vast number of mobile users in the city brings great opportunity for MCS, but the significance of user mobility is two-fold. It makes ubiquitous sensing possible, but it may lead to the uneven distribution of users in some regions. For instance, because of the random movement of users, some sensing areas may have insufficient or even very few users, which would prevent the cloud platform from recruiting a suitable user to finish the task. In this case, pre-deployed static nodes with powerful sensing, collecting, computing, and communicating capabilities in the city can supplement and collect the sensing information for the tasks.
In our system, there are some pre-deployed smart static nodes
that generally perform other work or just stay asleep. When the cloud platform
is unable to find a suitable user to execute the task, these static nodes can be the best substitute to sense the expected data and achieve optimal coverage collaboratively. As these static nodes
usually have more powerful sensing ability and radius than mobile users, we comprehensively consider three factors: location, sensing radius, and cost. Hence, we deduce the fitness function for the task to recruit the optimal static node, which is described as follows:
where
is the distance factor for the static node
similar to
.
represents the coverage ability for
.
,
and
are the balancing coefficients and
. In addition,
.
4.5. Process of Reputation-Based Collaborative User Recruitment Algorithm
To help the cloud platform find the most suitable participant to accomplish the task efficiently and qualitatively, we propose a reputation-based collaborative user recruitment algorithm (RCUR) by introducing the user reputation method and collaborative sensing with the purpose of achieving a higher task completion rate and bigger coverage. It is a task-centered algorithm to improve the benefits of tasks and cloud platforms. Then we apply the greedy algorithm to help us solve the problem. The specific process of the RCUR algorithm is described as follows and shown in Algorithm 1.
After the cloud platform
publishes the tasks
from some applications or the requesters, these mobile users
volunteer to take part in these tasks, and they will choose what kinds of tasks to participate in according to the information provided on the tasks. According to Equation (2), in order to achieve the goal of maximizing the sensing spatial coverage area of the tasks, the problem of user recruitment can be expressed as
. However, it is difficult to find the optimal user set for the whole task. Hence, the greedy algorithm is used to solve this issue. We divide the whole problem into several sub-problems and find the optimal solution for each sub-problem. In our system, for each task
, the cloud platform
will select the users who are close to the task in time and space and whose costs are less than the reward as the candidates. It will form a subset of users
for the task
. Then the user reputation module will evaluate the performance of the users in
and update their past reputation scores
. Then
calculates the user’s instantaneous reputation score
. Finally,
can attain the user
reputation score
for the task
at time
| Algorithm 1: A reputation-based collaborative User Recruitment algorithm (RCUR) in edge-aided MCS |
| Input: input , |
Output:
1: for u in U do
2: ,
3: form the candidate set |
4: end
5: for in do
6: Update their past reputation scores
7: Calculate the user instantaneous reputation score
8: Get the user reputation score
9: Calculate of |
| 10: Select who has max |
11: end
12: if
13: Calculate of |
14: Select that Maximize
15: end |
Next, for each task , we establish a fitness function that is based on the user reputation and cost for the task to recruit the most suitable user to meet the requirements of the task. However, in some areas with insufficient or very few users, we further utilize the static nodes to supplement and replace the users to collect the sensing information for the tasks. After that, we comprehensively consider the locations, sensing radius, and cost, then deduce the fitness function for the task to recruit the optimal static node.
In different conditions, our proposed RCUR algorithm presents two fitness functions and , then selects the most suitable participant based on the highest value of the fitness function to accomplish the tasks. For all tasks, the greedy algorithm is adopted to help the cloud platform select the most suitable user or edge node for each task. When all tasks time end, the user or the edge node for each task will form the solution set for all tasks.
5. Simulation and Numerical Results
In this section, extensive simulations are performed to verify our proposed reputation-based user recruitment algorithm (RBUR) and reputation-based collaborative user recruitment algorithm (RCUR), then compare the performance with the other three benchmark methods. We apply the RCUR algorithm to the custom simulator, which is called CrowdSenSim [
50], to help us conduct the experiments in realistic urban scenarios. In our simulation, we select a rectangular area of 10 km × 10 km in the real city of Ottawa as the experimental space similar to
Figure 2, and there are three important components which are users, tasks, and edge nodes. The mobile users who take the intelligent devices are randomly distributed and wander along the streets in the city at a speed of
in this area. The number of mobile users ranges from 5000 to 25,000, and the relevant details
of the mobile users
will be set up randomly before the experiments start. In the beginning, the users’ reputation scores are the same. As a user completes tasks, the value of their reputation score will change based on the quality of the completed tasks. Meanwhile, there are some edge nodes pre-deployed along the street in this area, and we set the key parameters according to [
22]. Then the cloud platform will publish a certain number of tasks at different locations with different budgets in this area, which varies
and divide each task into 10 timeslots, in which the cloud platform will select the best suitable user or edge node based on the fitness function to complete the tasks. We list the detailed experimental settings in
Table 2.
In our study, we choose three benchmark algorithms, including a participant recruitment method aiming at service quality (PRSQ) [
51], a budget re-distribution algorithm for edge nodes user recruitment (BRD-ENUR) [
47], and a basic wireless sensor network (WSN) sensing method (B-WSN). Then we compare them with our proposed RBUR and RCUR algorithms to verify their effectiveness and efficiency. The PRSQ algorithm constructed a quality of service model based on the accumulated reputation and willingness of participants, then selected the most suitable participants to ensure the QoS. The BRD-ENUR introduced edge computing into MCS. Then it estimated the quality of sensing data according to the participant’s reputation and proposed the algorithm to recruit users statically. B-WSN was the fundamental sensing algorithm and chose the static nodes to complete the tasks. The differences between these five algorithms are listed in
Table 3. Finally, we perform the experiments over 100 runs and obtain the average values to compare these five algorithms in some metrics, such as the task completion rate, task coverage rate, etc. As we know, the tasks will be divided into 10 timeslots. We assume that when more than half of the timeslots of one task are finished by the participants, we can define the task as completed. So we can calculate the overall task completion rate based on the completion of the task’s timeslots. Moreover, according to Equation (1), the coverage rate of one task can be defined as the value of the sensed coverage area by user or edge node divided by the expected sensing coverage area of the task in certain time limitations.
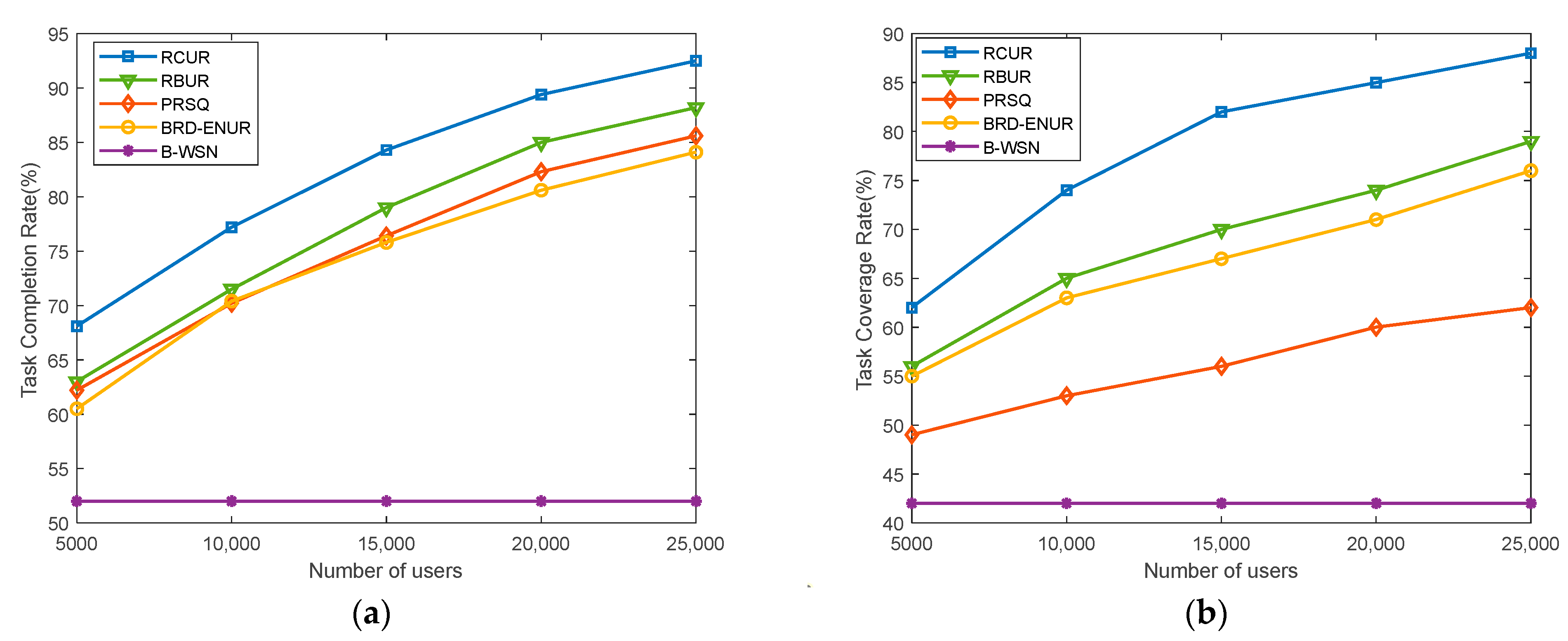
In
Figure 3, we evaluate the performance of these five algorithms under the various number of users when we set the tasks = 100, edge nodes = 50, and budget = 150. From
Figure 3a, we compare the task completion rate and find that our proposed RCUR is more outstanding than the other three benchmark algorithms. The RBUR is closer but better than the PRSQ and BRD-ENUR. In contrast, B-WSN maintains a relatively low task completion rate.
Figure 3b demonstrates that our RCUR also can achieve a higher task coverage rate than other algorithms. By taking into account multiple factors, the RBUR has a better result than the PRSQ and BRD-ENUR. Since B-WSN depends on the sensing and cover ability of the edge nodes, which are less numerous than mobile users, it only selects edge nodes to sense these data and complete tasks. As the number of mobile users increases, MCS algorithms will have a larger user pool to find the most suitable user to complete each task. The more mobile users that participate, the higher possibility the tasks can be completed. Even more, a more covered area can be attained. As a result, when the number of users ranges from 5000 to 25,000, the performance of three algorithms in MCS shows an upward trend both in the task completion rate and the task coverage rate. However, our proposed RCUR approach not only recruits the appropriate mobile user to finish tasks but also utilizes the edge nodes as a supplement when there are no available users in some sensing areas. Hence, the performance of RCUR is better than others.
In
Figure 4, when we set tasks = 100, users = 10,000, and budget = 150, we tried to discuss how the task completion rate and task coverage rate change when the number of edge nodes increases.
Figure 4 illustrates that there is a huge difference between our proposed RBUR, RCUR, and the other three algorithms. Although BRD-ENUR introduces edge nodes into the MCS system, it only takes these nodes as edge platforms which can reduce storage and computing load in the cloud platform. RCUR and B-WSN make full use of the enhanced sensing ability of these edge nodes to sense the data and cover the sensing areas. Therefore, when there are more and more edge nodes in the sensing areas, each task will have more options to find the optional solution, which can give rise to a great improvement in the task completion rate and task coverage rate. From
Figure 4, we can see that when the edge nodes are equal to 30, RUCR is slightly better than PRSQ and BRD-ENUR both in the task completion rate and task coverage rate. The RBUR remains unchanged, while the B-WSN stays at a low value. With the number of edge nodes growing,
Figure 4a indicates that RCUR is improved from 72% to 85%, and B-WSN has a great improvement from 38% to 66% in task completion rate. The reason is that while our RCUR takes the edge nodes as a collaborative sensing method, it mainly recruits mobile users to finish the tasks. Consequently, it does not attain much improvement over the B-WSN. In
Figure 4b, the task coverage rates of RCUR and B-WSN also present an increasing trend, and our RCUR always outperforms other algorithms.
When we set tasks = 100, users = 10,000, and edge nodes = 50, it can be seen from
Figure 5 that the task completion rate and task coverage rate increase substantially with the total budget growing. Since PRSQ and B-WSN do not consider the budget, as the value of the total budget changes, the performances of the task completion rate and task coverage rate of PRSQ and B-WSN remain constant. While our RBUR, RUCR, and BRD-ENUR take the budget as an important consideration, the three curves remain in an upward state with the increasing value of the budget, and RBUR is very close to BRD-ENUR. When the budget is equal to 100, we can find that RUCR and BRD-ENUR only achieve 45% and 39% task completion rates in
Figure 5a, meanwhile 30% and 26% task coverage rates in
Figure 5b. With the increasing budget, the performances have a rapid growth when budget = 200. The reason is that the limited budget will reduce user enthusiasm, and the task rewards may not cover the user costs. When the total budget expands, more users will be more willing to take part in the tasks, so the platform will have a greater possibility to select the suitable user for each task. Compared with the BRD-ENUR, under the same condition, our RUCR effectively combines the capabilities of mobile users and edge nodes so that this collaborative sensing method can provide strong guarantees for task completion and task coverage. Therefore, our RUCR is more excellent than the BRD-ENUR approach, no matter the value of the budget.
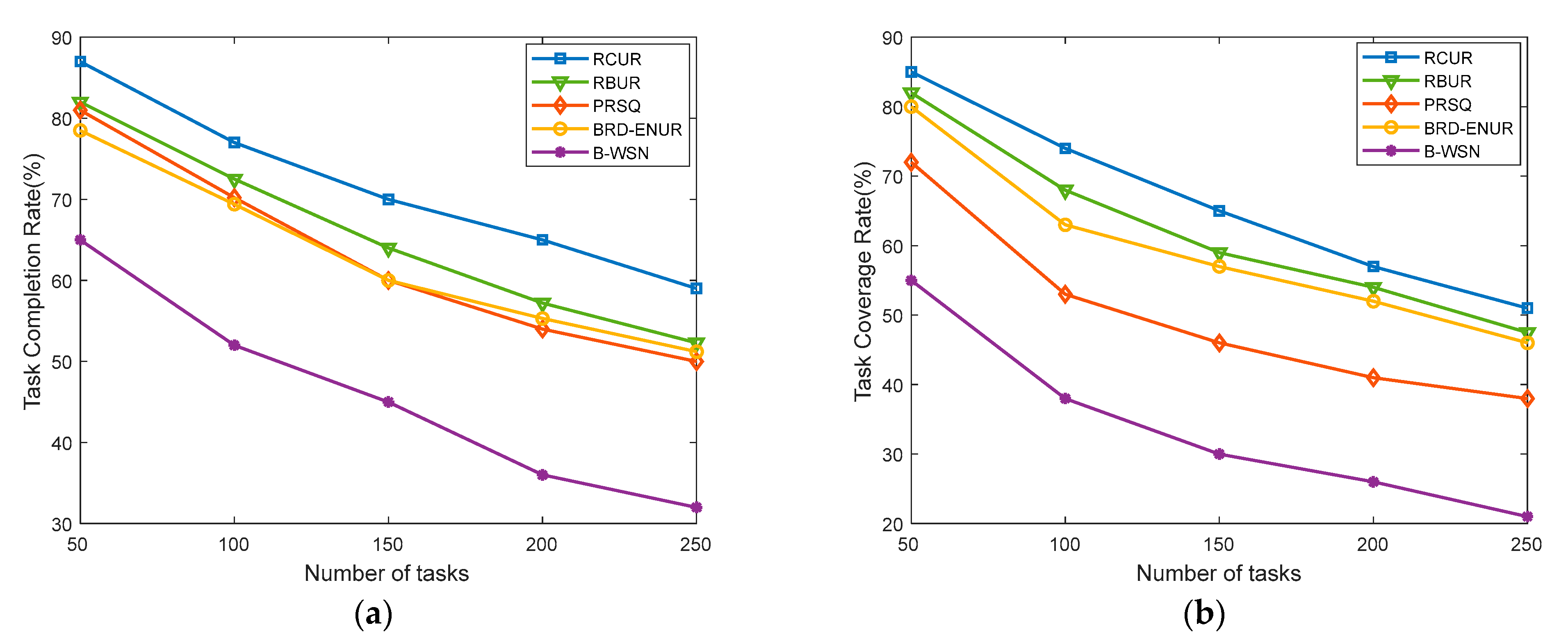
In
Figure 6, we verify the relationship between the performance of the task completion rate and task coverage rate with the varying number of tasks. Through the comparison with the other three algorithms, our RCUR displays a better performance, and all of the algorithms show a downward trend with the number of tasks increasing. When the number of tasks is equal to 50, it is obvious that our RCUR significantly outperforms the other three benchmark algorithms. However, when the number of users and edge nodes remains unchanged, more tasks mean that there are not sufficient users or edge nodes to be candidates, which cannot guarantee the task completion rate. Furthermore, the platform may not find the most suitable participant to complete the task and ensure coverage. From
Figure 6a, it can be seen that when the tasks increase to 250, our RCUR decreases from 87% to 59% in terms of the task completion rate but is still far superior to other algorithms. The results in
Figure 6b are just as we expected that our RCUR takes a huge advantage in the performance of task coverage rate.
In
Figure 7, we compare the task completion rate and task coverage rate of our RCUR approach with the other three algorithms under the different values of the initial user reputation. As we know, We except for the B-WSN algorithm, the other algorithms regard the user reputation as a fundamental consideration and recruit the participant based on the user reputation. However, our RBUR and RCUR not only evaluate the user’s past reputation scores according to historical performance. Furthermore, it also takes account of the instantaneous reputation score and combines them to attain the user reputation.
Figure 7a indicates that the performance of these algorithms has a slow growth with the initial reputation increasing. However, our RBUR and RCUR occupy the leading position in terms of task completion rate. When the value of a user’s initial reputation increases, it means that there will be more users who can meet the requirement of the tasks and can be potential participants in finishing the task. In
Figure 7b, we can observe that the increasing value of the initial reputation will have a more obvious influence in terms of the task coverage rate. This is because our RBUR and RCUR approach take the cover ability of the user as a vital indicator of the instantaneous reputation so that the platform will relatively select the user who may have the better cover ability to complete the task.
Figure 8 illustrates that the values of the user sensing radius have a significant impact on the task completion rate and task coverage rate. The user sensing radius represents the user’s cover ability, which means that the user is able to provide a guarantee for task coverage. From
Figure 8a, we can clearly see that when the value of the user sensing radius becomes bigger, mobile users have more powerful sensing and cover ability, so the four algorithms in MCS have an improvement in terms of the task completion rate. Furthermore, similar to
Figure 7, the results have proven that user sensing radius is a contributing factor to the task coverage rate in
Figure 8b. When the user sensing radius is equal to five, the limited cover ability cannot satisfy the task’s constraints, so all algorithms attain a relatively low task coverage rate. With the user sensing radius increasing, in some cases, the tasks may be completely covered by the mobile users. Meanwhile, due to the collaborative sensing by the mobile users and edge nodes, our RCUR can achieve a better performance compared with other algorithms.
6. Conclusions and Future Work
The emergence of the Internet of Things and the widespread popularity of intelligent mobile devices enable Mobile CrowdSensing (MCS) to be a convenient platform for many applications. Meanwhile, the introduction of edge computing has also accelerated the development of MCS. However, how to make MCS more efficient and utilize edge computing technology has raised huge challenges. Hence, designing a reasonable user recruitment algorithm to find suitable users and take full advantage of edge nodes in order to improve the task completion rate and coverage rate has become increasingly important and urgent. In this study, we propose a reputation-based collaborative user recruitment algorithm (RCUR) under a certain budget in an edge-aided Mobile CrowdSensing system. We first introduce edge computing into MCS and build an edge-aided MCS system in urban scenarios. Moreover, we analyze the influence of user reputation on user recruitment. Then we establish a user reputation module to evaluate the user’s past reputation score based on the previous performance, which indicates the users’ reliability and credibility. Then we jointly consider the distance and coverage ability of the user to calculate the instantaneous reputation score. Thus, we deduce the user reputation equation by combining the user’s past reputation score with the instantaneous reputation score. Finally, we utilize the sensing ability of edge nodes and design a collaborative sensing method. We use the greedy method to help choose the appropriate users for the tasks. Simulation results compared with the other three algorithms prove that our RCUR approach can significantly achieve better performance in task completion rate and task coverage rate.
A dynamic user recruitment algorithm is one of our future works. Generally speaking, user recruitment always recruits one participant to accomplish a certain task. However, when the tasks require more users to sense these data, how to design an optimal algorithm to select a set of users has been an important problem in MCS. Meanwhile, how to dynamically determine the number of required users for the tasks according to the user’s characteristics, such as cover ability, reputation, and cost, is also a tough problem. In the future, we will concentrate on this dynamic user recruitment in MCS.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}