
Deep Compressed Sensing Generation Model for End-to-End Extreme Observation and Reconstruction
Abstract
:1. Introduction
2. Related Background
2.1. Compressed Sensing
2.2. Compressed Sensing Using Generative Models
2.3. Deep Compressed Sensing
3. Method
3.1. Notation Explanation
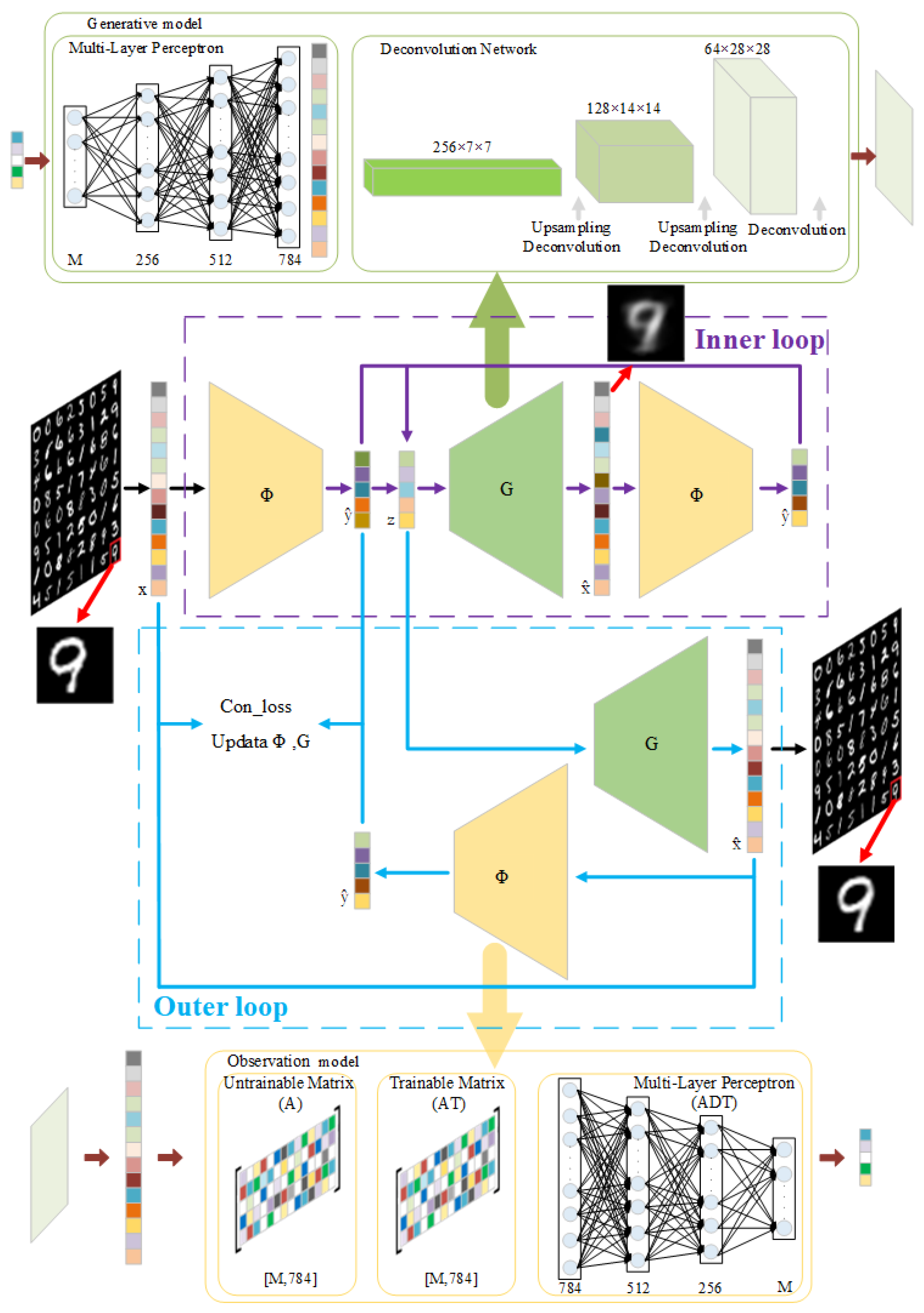
3.2. Model Structure
3.3. Algorithm Design
| Algorithm 1: The pseudo code of end-to-end deep compressed sensing generative model (E2E_DCSGM). |
| Input: : real samples x~P(T) N: Outer loop iteration T: Inner loop iteration |
| Training: |
| for i in range N//Outer loop iteration N times |
| //y is obtained by real data x |
| //real data observation vector normalization |
| for j in range T//Inner loop iteration T times |
| // is obtained by generation sample |
| //calculate the inner loop loss |
| //optimize input, the inner loop optimization rate α |
| end for//End the inner loop |
| //the joint loss of outer loop: |
| //optimize model, the outer loop optimization rate β |
| end for//End the outer loop |
| Output: : the generative model : the observation model : reconstruction samples |
4. Experiments and Results
4.1. Experimental Dataset
4.2. Experiment Operation Environment
4.3. Training Parameters and Evaluation Standards
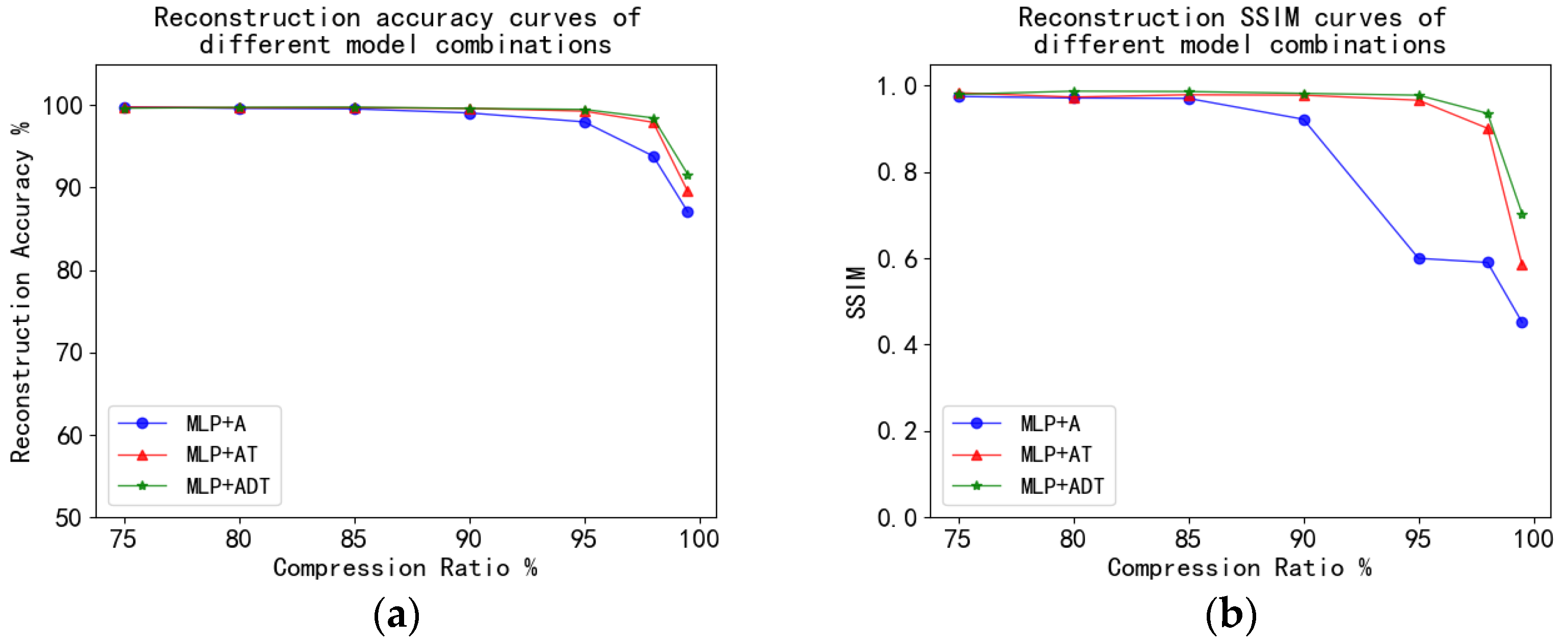
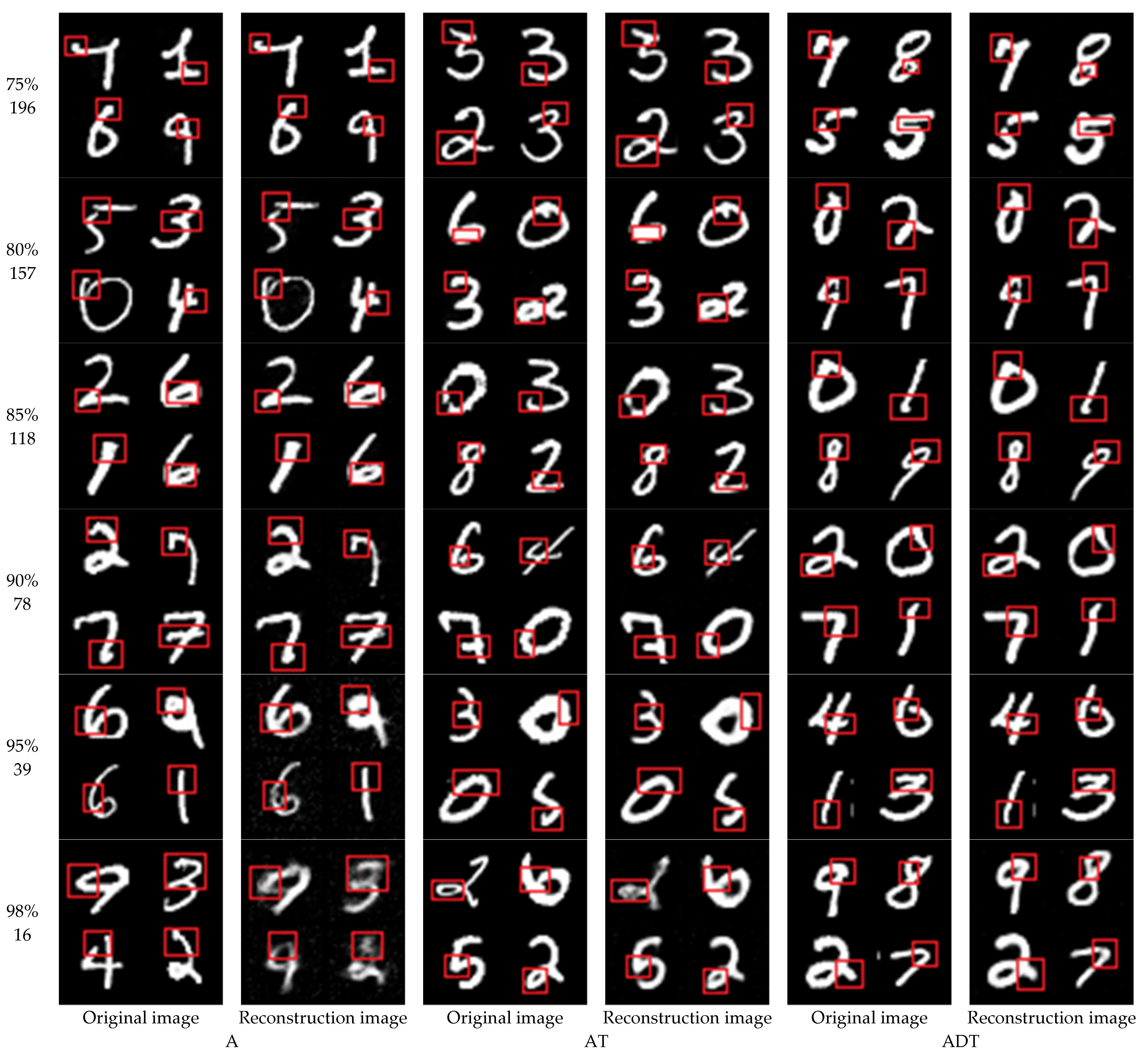
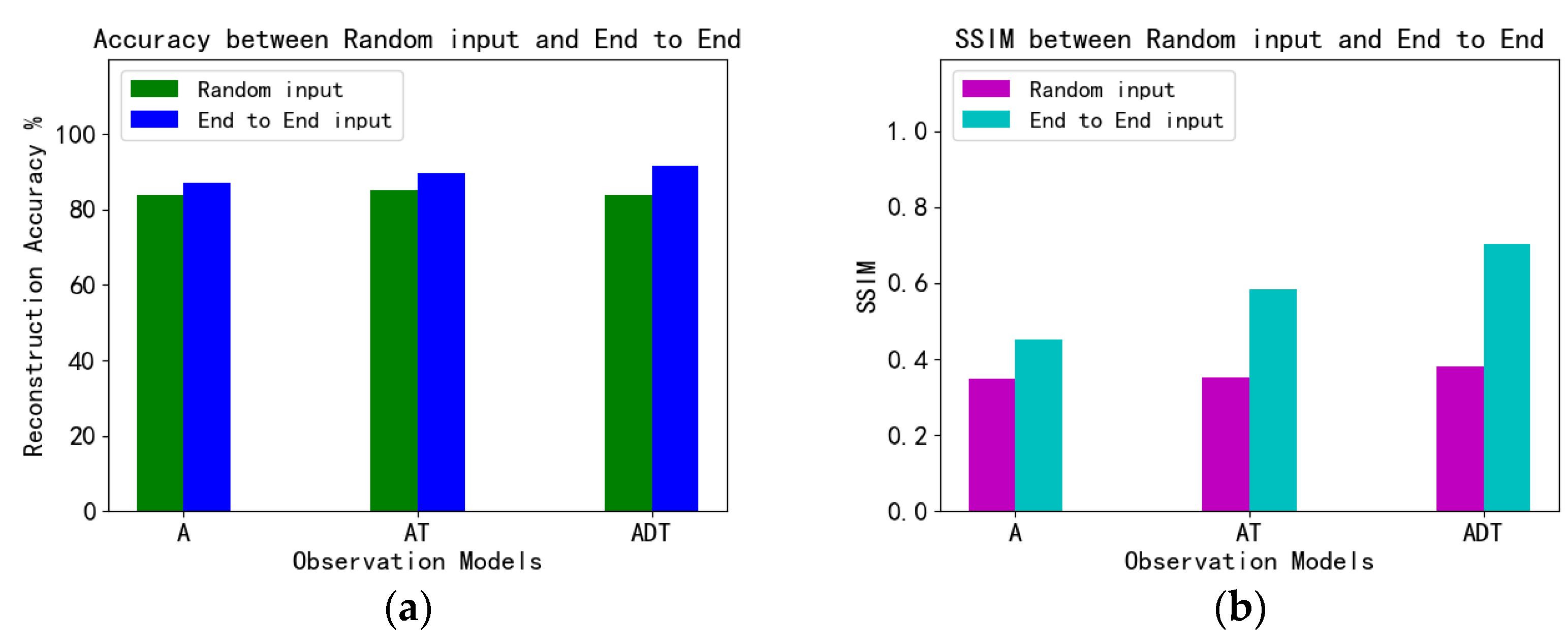
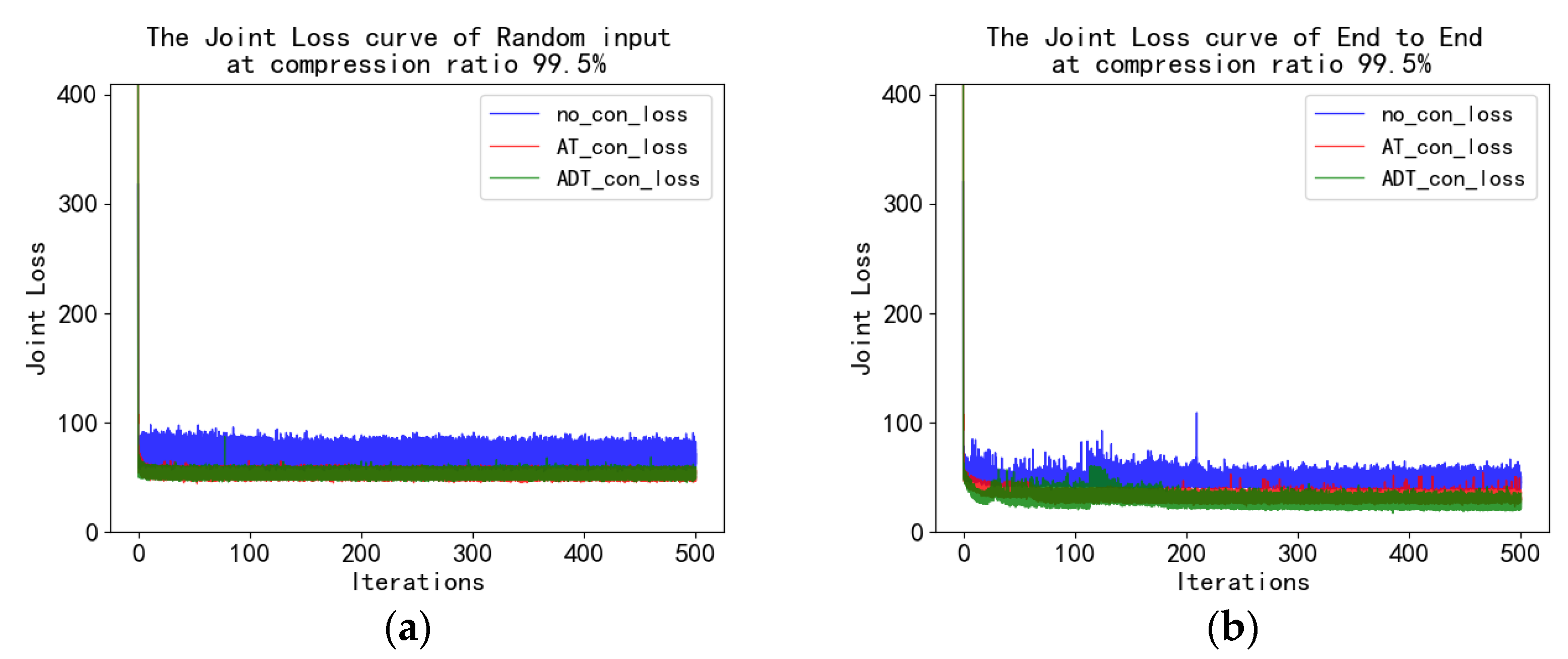
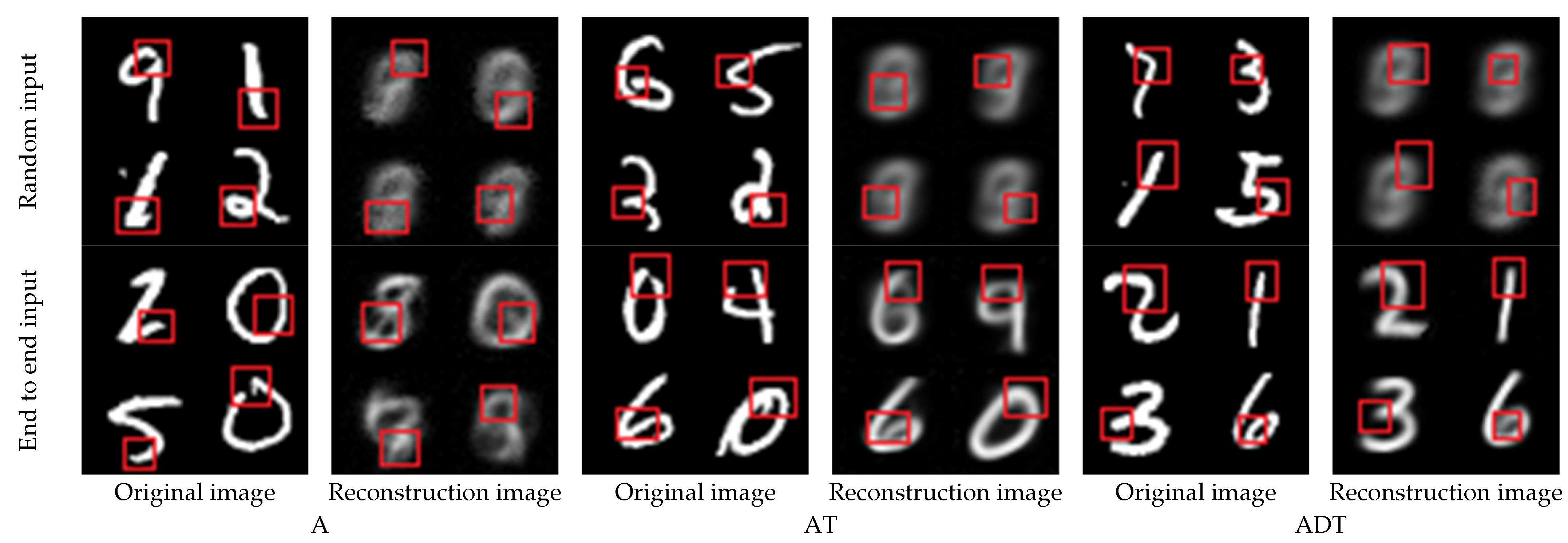
4.4. MNIST Experiment and Analysis
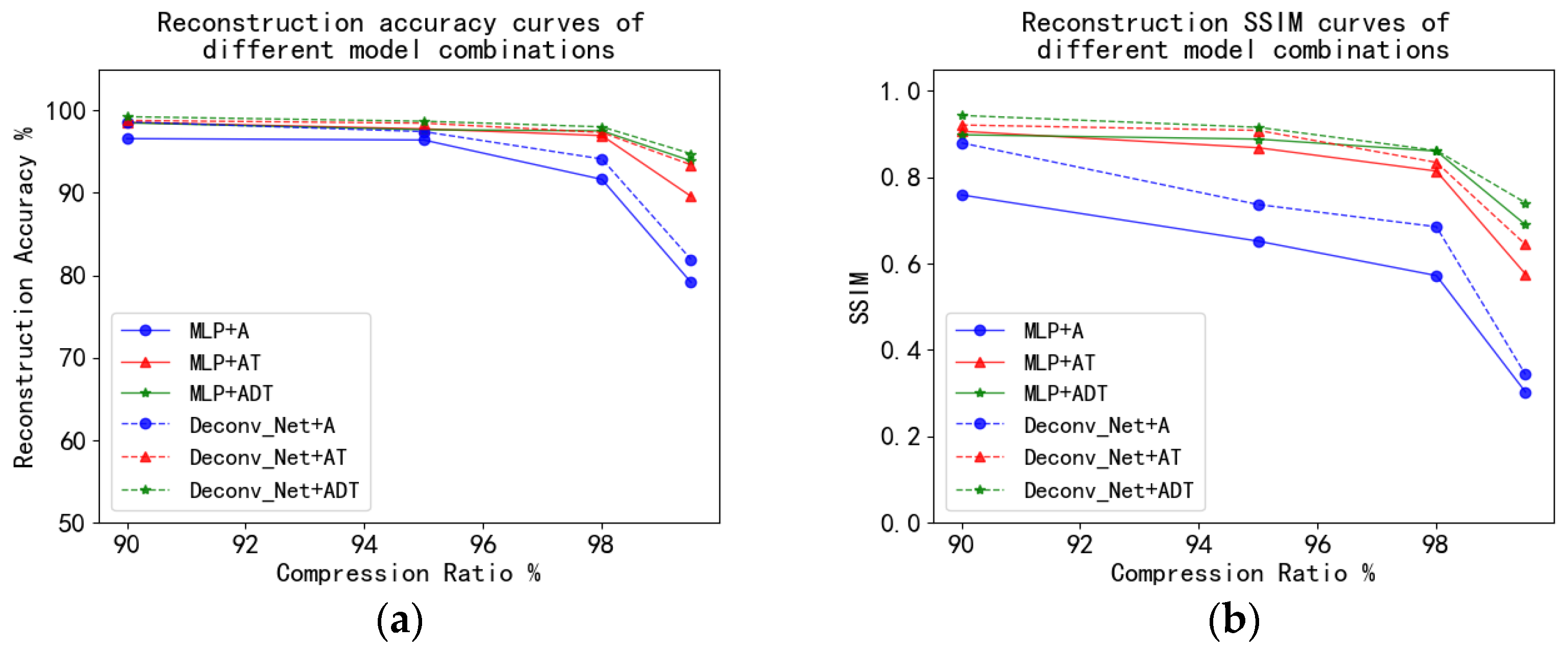
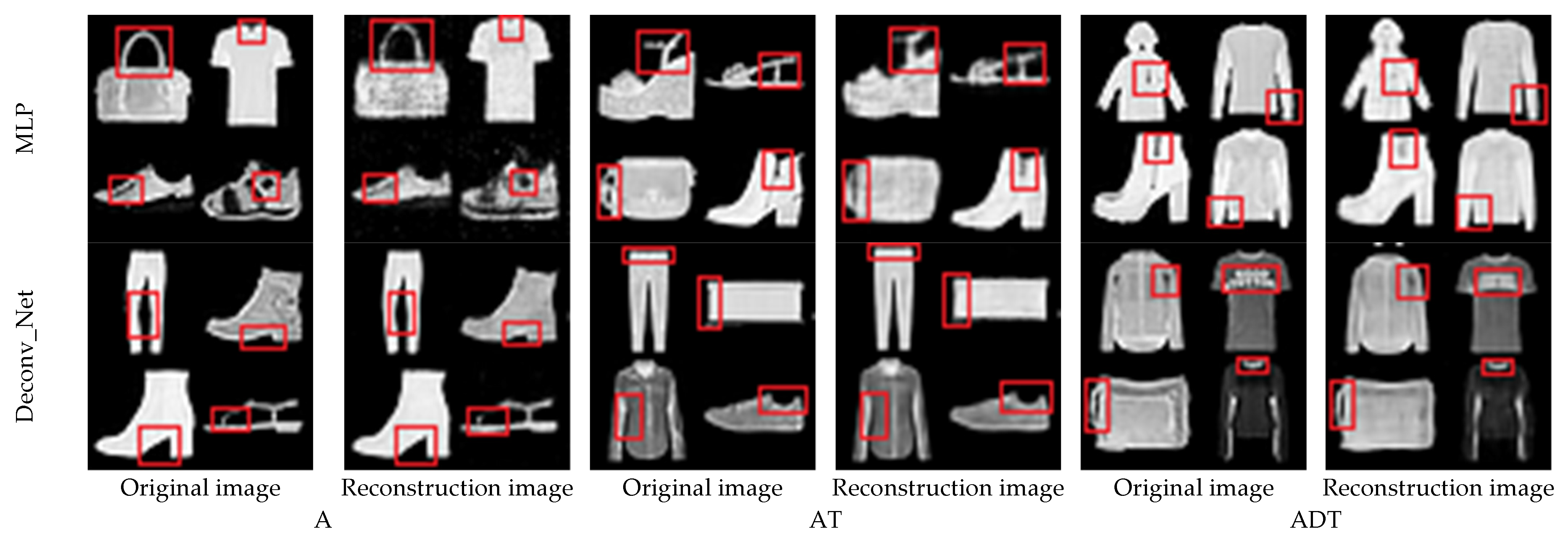
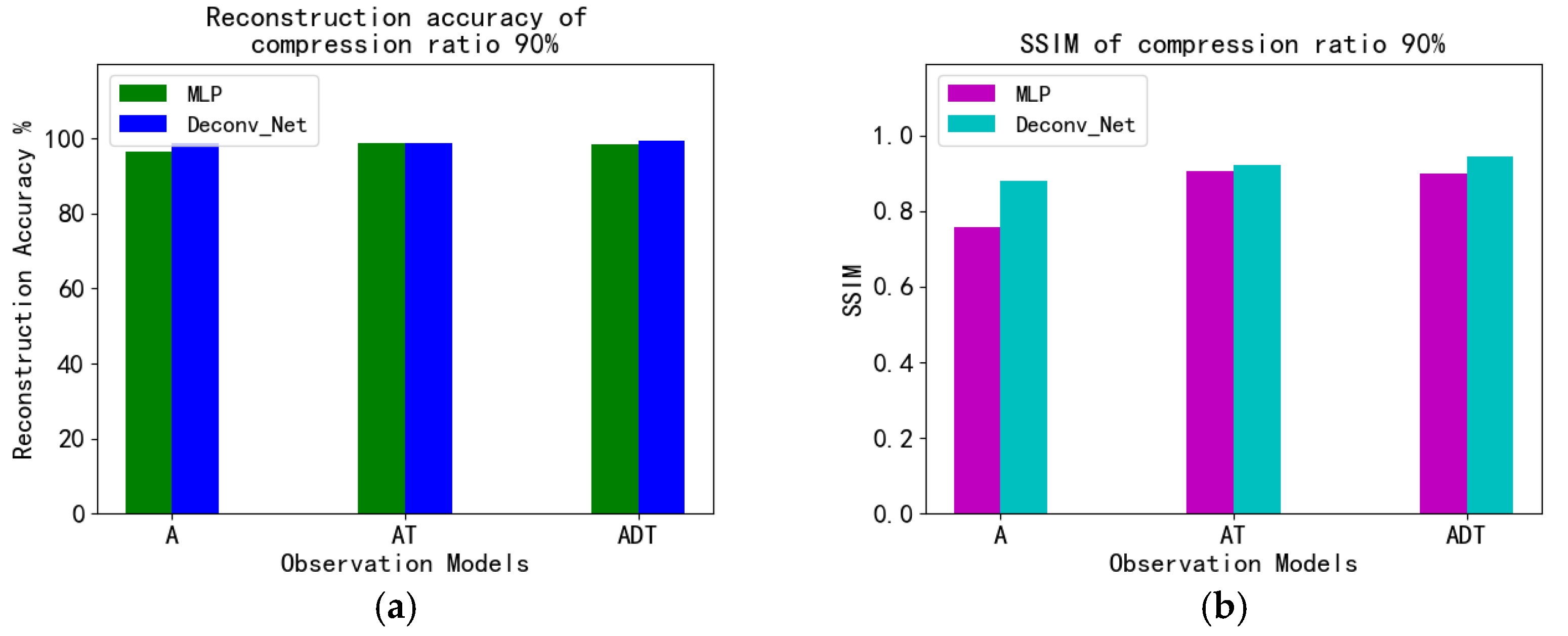
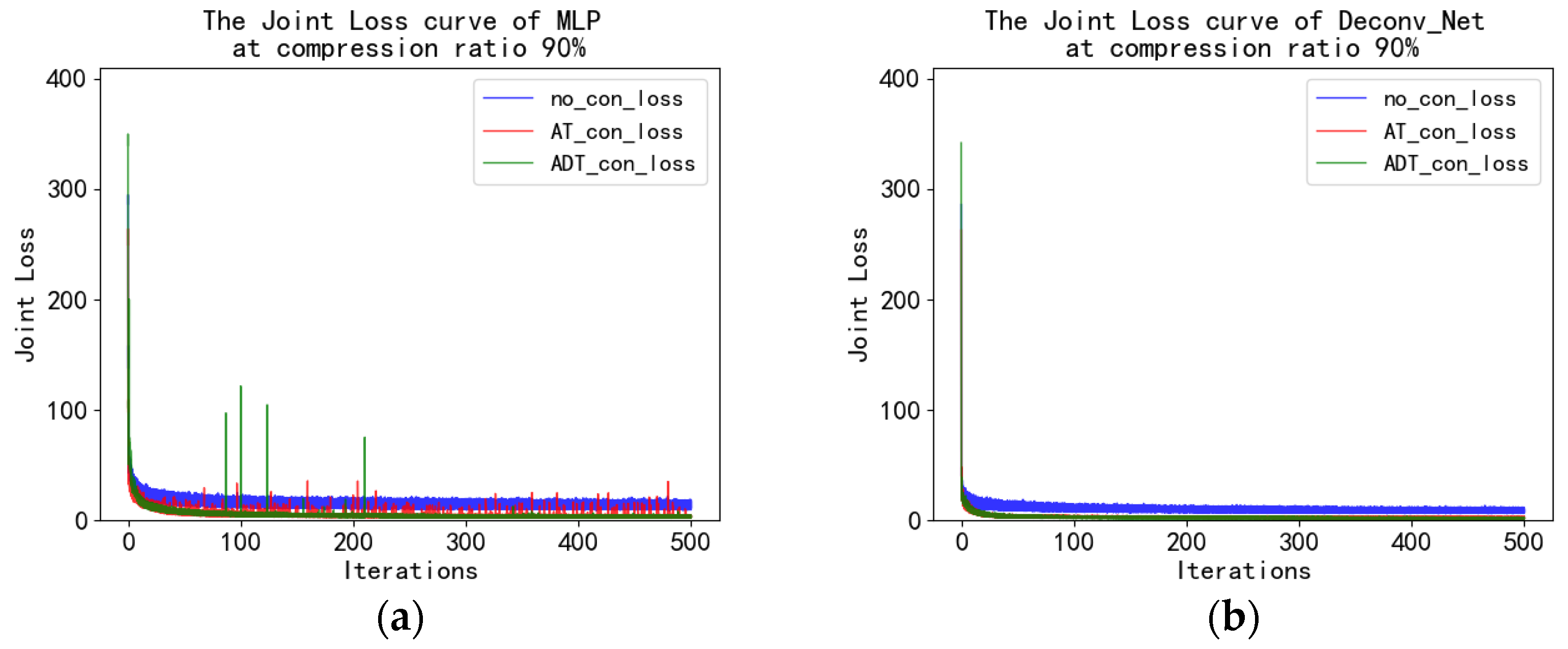
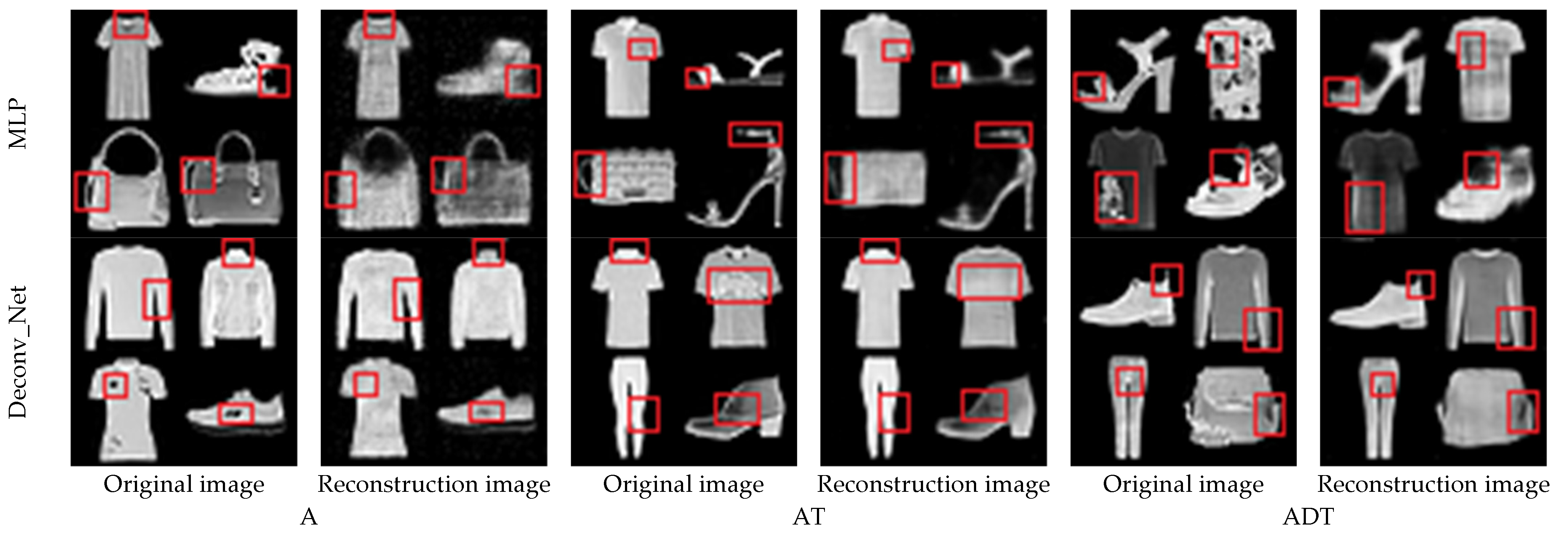
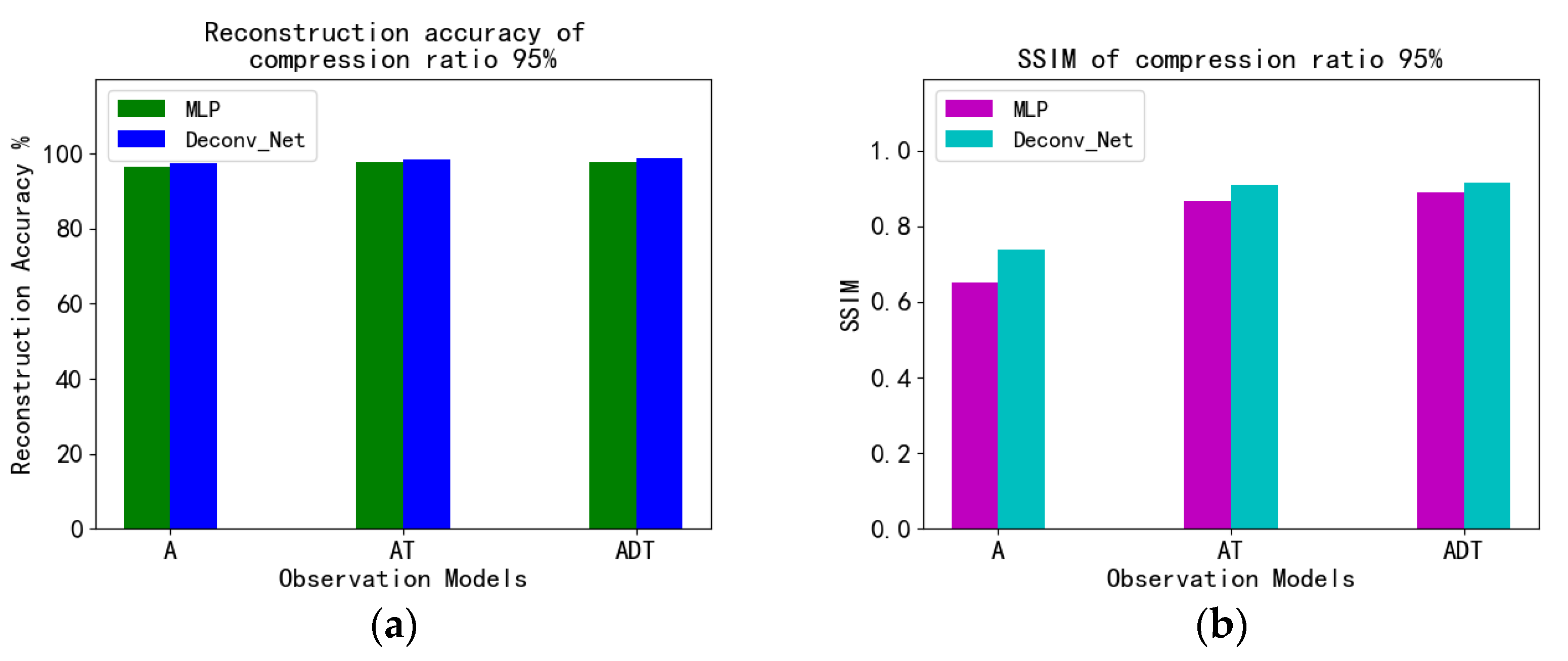
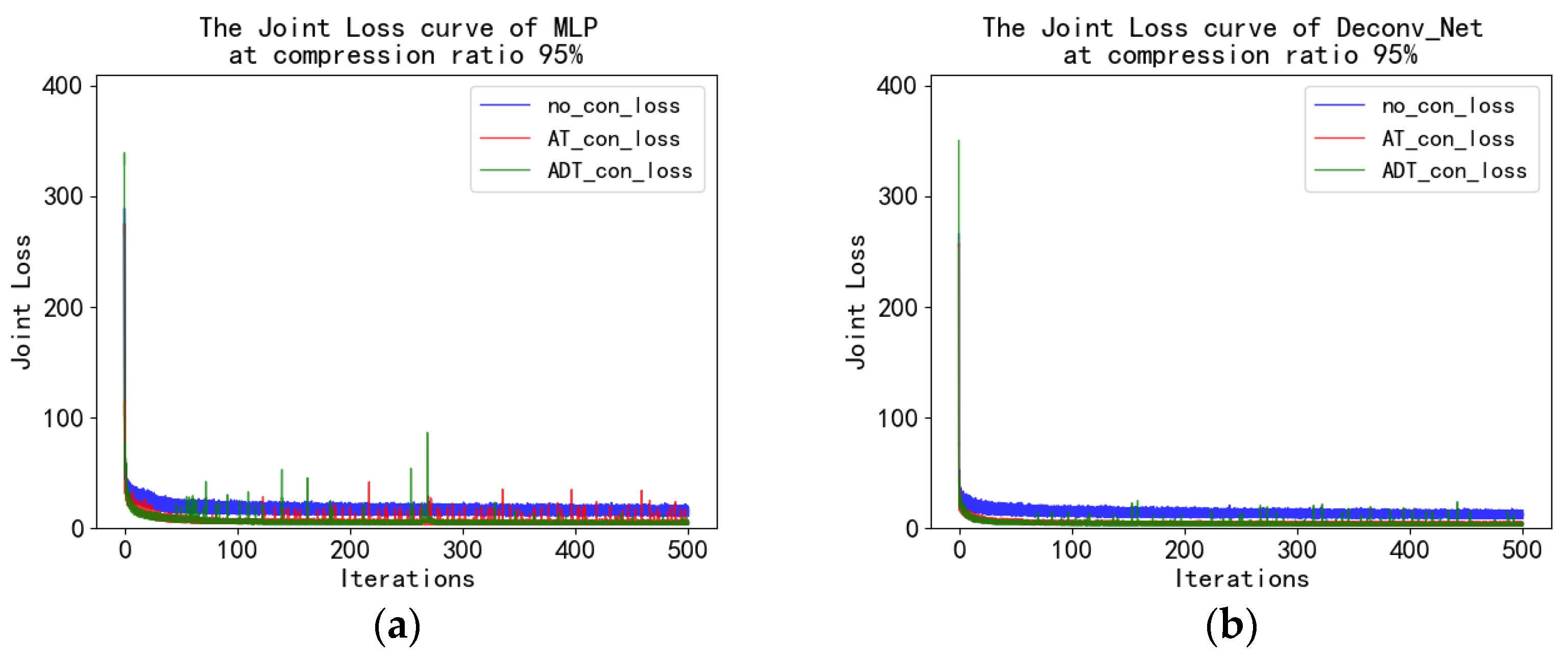
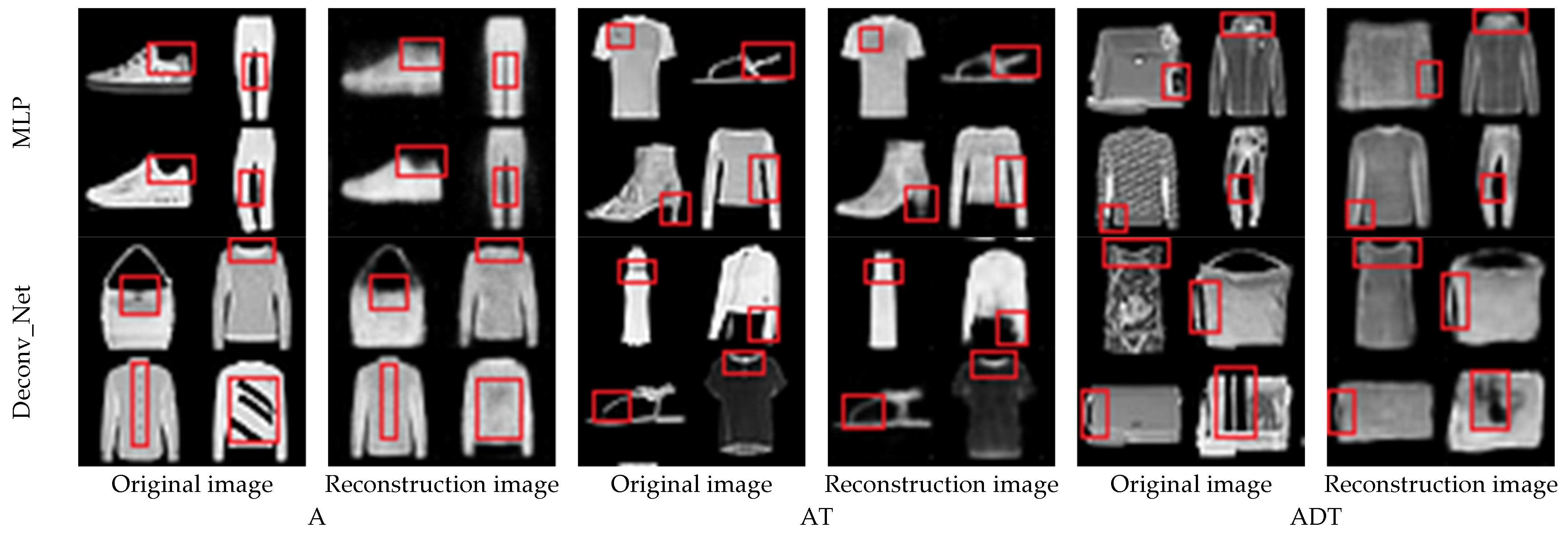
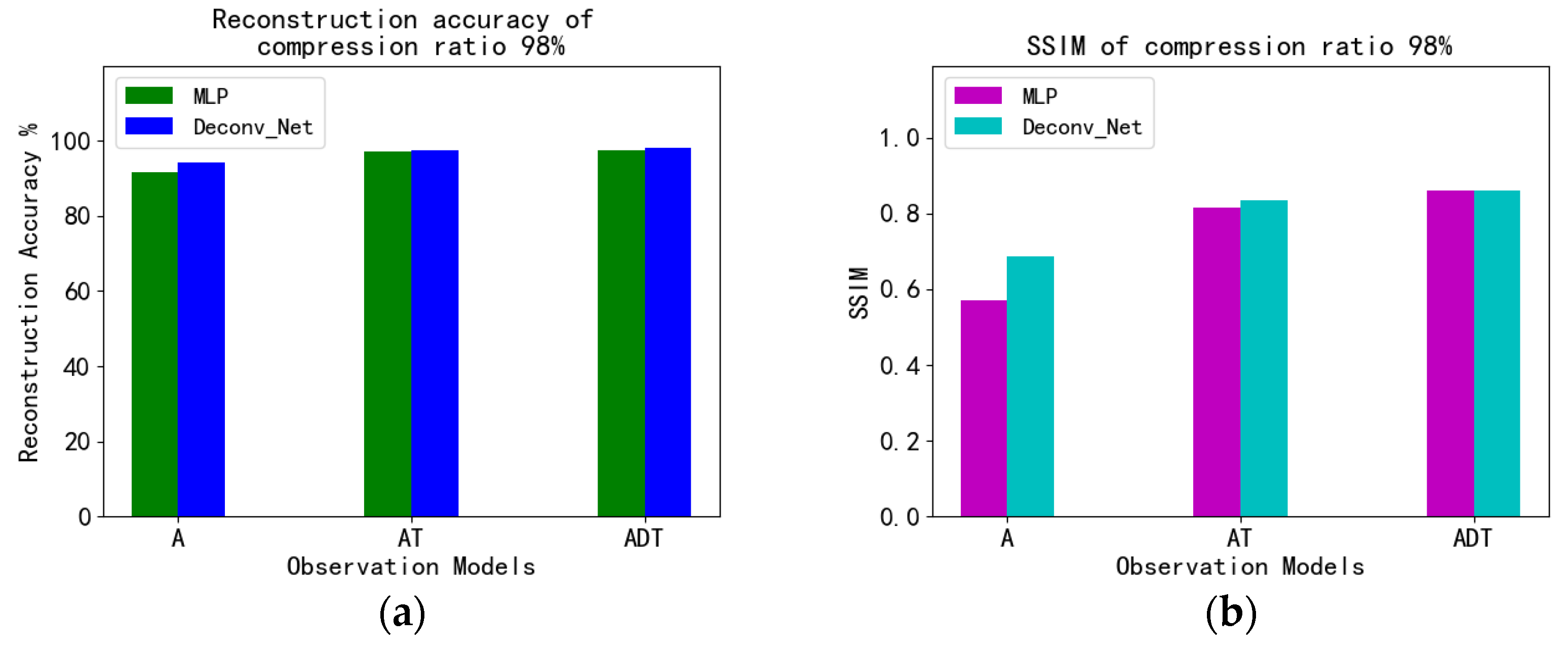
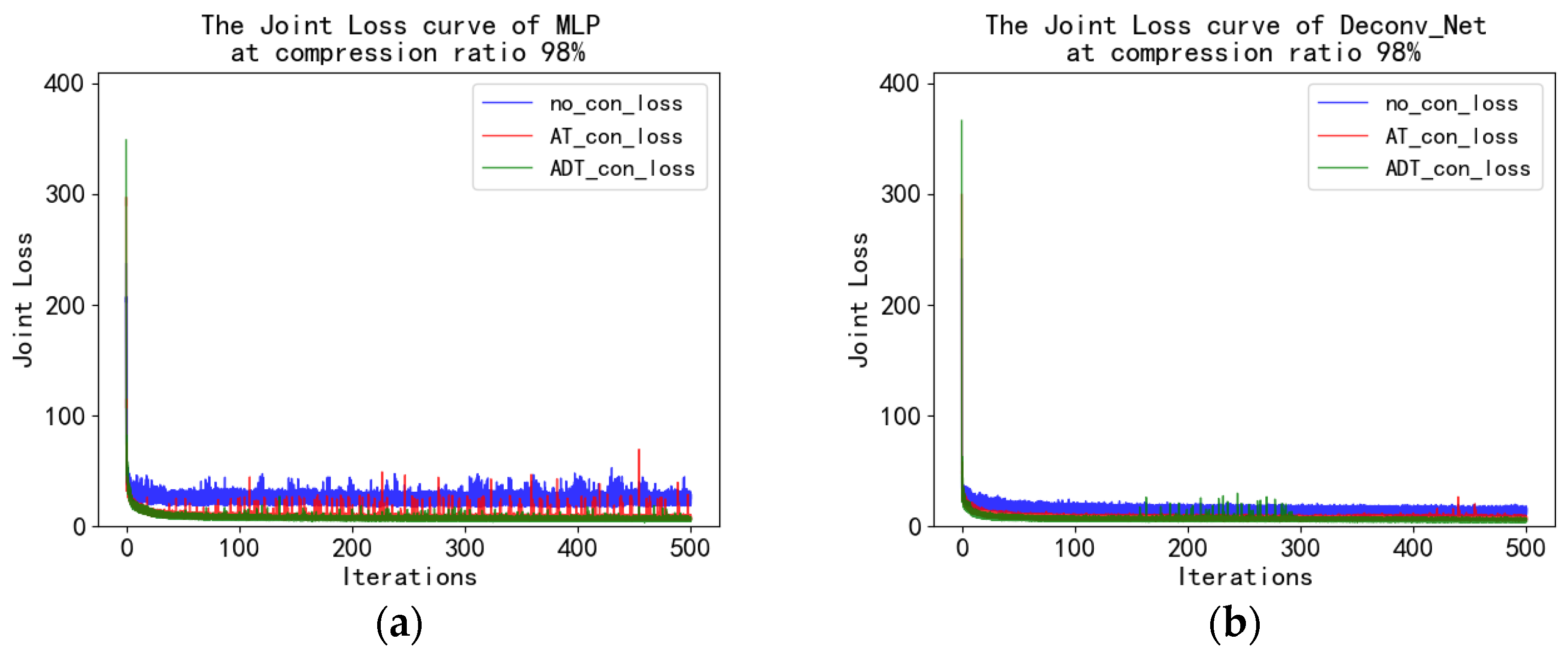
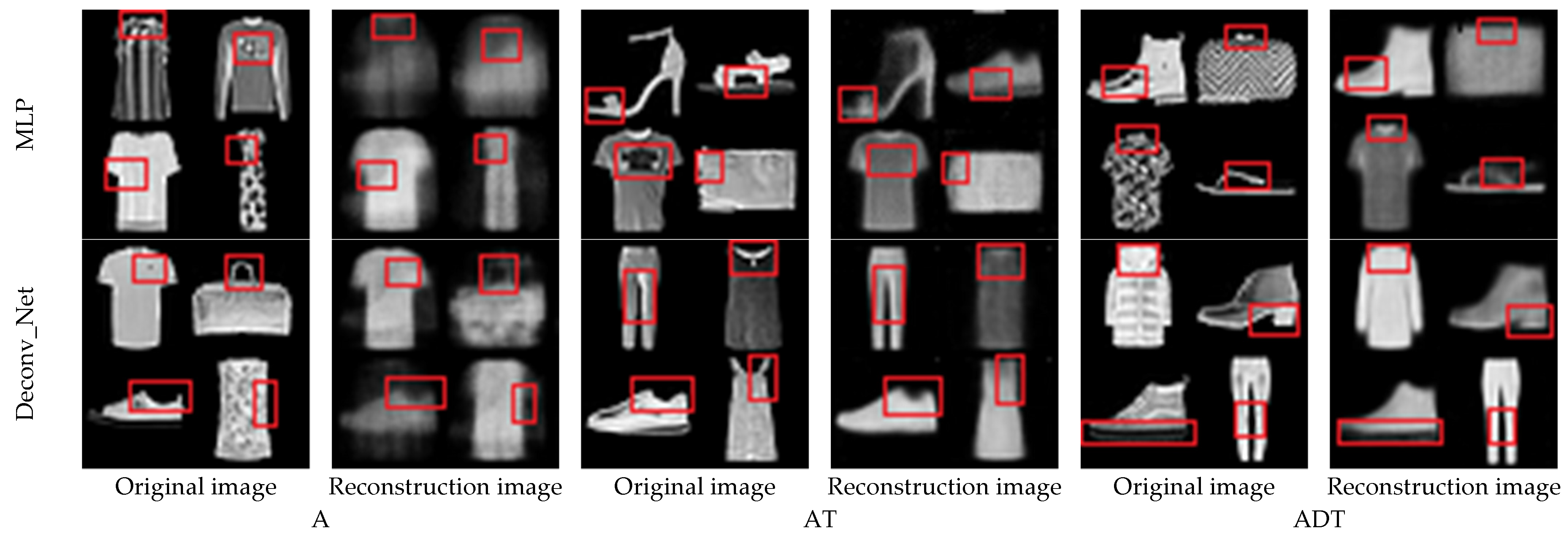
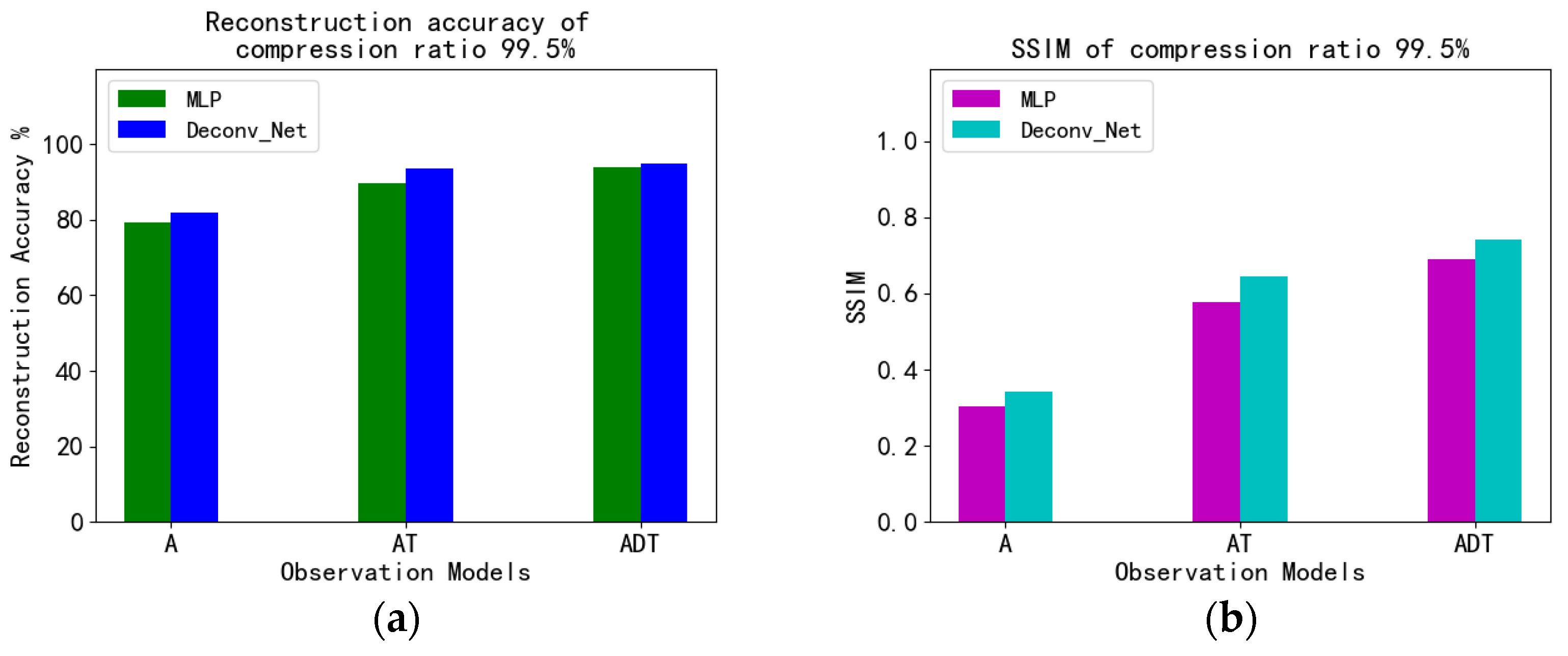
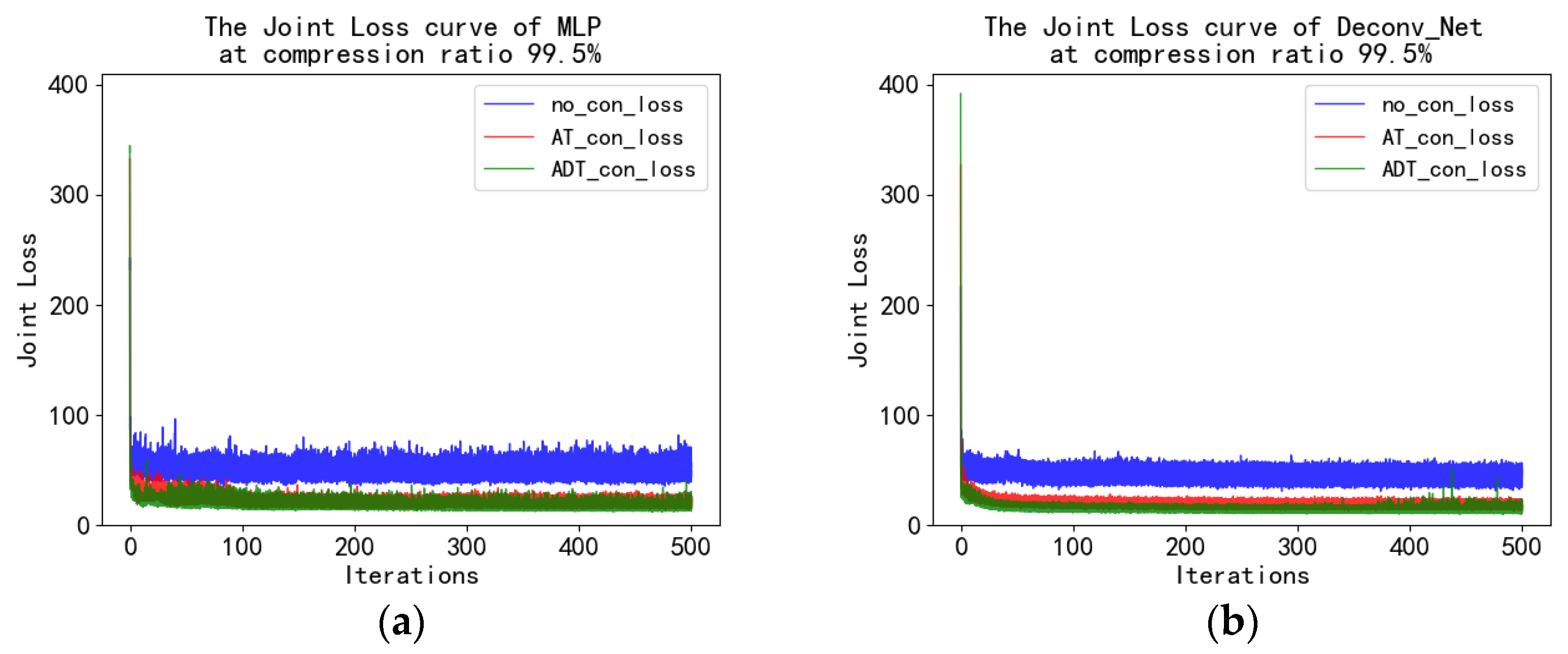
4.5. Fashion_MNIST Experiment and Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shi, G.M.; Liu, D.H.; Gao, D.H.; Liu, Z.; Lin, J.; Wang, L.J. Advances in Theory and Application of Compressed Sensing. Acta Electron. Sin. 2009, 37, 1070–1081. [Google Scholar]
- Donoho, D.L. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Zeng, C.Y.; Ye, J.X.; Wang, Z.F.; Wu, M. Survey of compressed sensing reconstruction algorithms in deep learning framework. Comput. Eng. Appl. 2019, 55, 1–8. [Google Scholar]
- Jiao, L.C.; Yang, S.Y.; Liu, F.; Hou, B. Development and Prospect of Compressive Sensing. Acta Electron. Sin. 2011, 39, 1651–1662. [Google Scholar]
- Tauböck, G.; Hlawatsch, F. A compressed sensing technique for OFDM channel estimation in mobile environments: Exploiting channel sparsity for reducing pilots. In Proceedings of the 2008 IEEE International Conference on Acoustics, Speech and Signal Processing, Las Vegas, NV, USA, 31 March–4 April 2008; pp. 2885–2888. [Google Scholar]
- Bajwa, W.U.; Haupt, J.D.; Sayeed, A.M.; Nowak, R.D. Joint Source–Channel Communication for Distributed Estimation in Sensor Networks. IEEE Trans. Inf. Theory 2007, 53, 3629–3653. [Google Scholar] [CrossRef]
- Lustig, M.; Donoho, D.L.; Pauly, J.M. Sparse MRI: The application of compressed sensing for rapid MR imaging. Magn. Reson. Med. 2007, 58, 1182–1195. [Google Scholar] [CrossRef]
- Provost, J.; Lesage, F. The Application of Compressed Sensing for Photo-Acoustic Tomography. IEEE Trans. Med. Imaging 2009, 28, 585–594. [Google Scholar] [CrossRef]
- Jung, H.; Sung, K.; Nayak, K.S.; Kim, E.Y.; Ye, J.C. k-t FOCUSS: A general compressed sensing framework for high resolution dynamic MRI. Magn. Reson. Med. 2009, 61, 103–116. [Google Scholar] [CrossRef]
- Kim, Y.; Narayanan, S.S.; Nayak, K.S. Accelerated three-dimensional upper airway MRI using compressed sensing. Magn. Reson. Med. 2009, 61, 1434–1440. [Google Scholar] [CrossRef] [Green Version]
- Hu, S.; Lustig, M.; Chen, A.P.; Crane, J.C.; Kerr, A.B.; Kelley, D.A.; Hurd, R.E.; Kurhanewicz, J.; Nelson, S.J.; Pauly, J.M.; et al. Compressed sensing for resolution enhancement of hyperpolarized 13C flyback 3D-MRSI. J. Magn. Reson. 2008, 192, 258–264. [Google Scholar] [CrossRef] [Green Version]
- Herman, M.A.; Strohmer, T. High-Resolution Radar via Compressed Sensing. IEEE Trans. Signal Process. 2009, 57, 2275–2284. [Google Scholar] [CrossRef] [Green Version]
- Bobin, J.; Starck, J.; Ottensamer, R. Compressed Sensing in Astronomy. IEEE J. Sel. Top. Signal Process. 2008, 2, 718–726. [Google Scholar] [CrossRef] [Green Version]
- Shamsi, D.; Boufounos, P.T.; Koushanfar, F. Noninvasive leakage power tomography of integrated circuits by compressive sensing. In Proceedings of the 13th International Symposium on Low Power Electronics and Design (ISLPED ‘08), Bangalore, India, 11–13 August 2008; pp. 341–346. [Google Scholar]
- Wright, J.; Yang, A.Y.; Ganesh, A.; Sastry, S.S.; Ma, Y. Robust Face Recognition via Sparse Representation. IEEE Trans. Pattern Anal. Mach. Intell. 2009, 31, 210–227. [Google Scholar] [CrossRef]
- Elad, M. Optimized Projections for Compressed Sensing. IEEE Trans. Signal Process. 2007, 55, 5695–5702. [Google Scholar] [CrossRef]
- Calderbank, R. Compressed Learning: Universal Sparse Dimensionality Reduction and Learning in the Measurement Domain; Technical Report; Rice University: Houston, TX, USA, 2009. [Google Scholar]
- Duarte, M.F.; Davenport, M.A.; Takhar, D.; Laska, J.N.; Sun, T.; Kelly, K.F.; Baraniuk, R. Single-Pixel Imaging via Compressive Sampling. IEEE Signal Process. Mag. 2008, 25, 83–91. [Google Scholar] [CrossRef] [Green Version]
- Bora, A.; Jalal, A.; Price, E.; Dimakis, A.G. Compressed Sensing using Generative Models. In Proceedings of the International Conference on Machine Learning, Sydney, Australia, 6–11 August 2017. [Google Scholar]
- Kingma, D.P.; Welling, M. Auto-Encoding Variational Bayes. arXiv 2014, arXiv:1312.6114. [Google Scholar]
- Goodfellow, I.J.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.C.; Bengio, Y. Generative Adversarial Nets. In Neural Information Processing Systems; MIT Press: Cambridge, MA, USA, 2014. [Google Scholar]
- Mardani, M.; Gong, E.; Cheng, J.Y.; Vasanawala, S.S.; Zaharchuk, G.; Alley, M.T.; Thakur, N.; Han, S.; Dally, W.J.; Pauly, J.M.; et al. Deep Generative Adversarial Networks for Compressed Sensing Automates MRI. arXiv 2017, arXiv:1706.00051. [Google Scholar]
- Veen, D.V.; Jalal, A.; Price, E.; Vishwanath, S.; Dimakis, A.G. Compressed Sensing with Deep Image Prior and Learned Regularization. arXiv 2018, arXiv:1806.06438. [Google Scholar]
- Wu, Y.; Rosca, M.; Lillicrap, T.P. Deep Compressed Sensing. In Proceedings of the International Conference on Machine Learning, Long Beach, CA, USA, 10–15 June 2019. [Google Scholar]
- Sun, Y.; Chen, J.; Liu, Q.; Liu, G. Learning image compressed sensing with sub-pixel convolutional generative adversarial network. Pattern Recognit. 2020, 98, 107051. [Google Scholar] [CrossRef]
- Sheykhivand, S.; Rezaii, T.Y.; Meshgini, S.; Makoui, S.; Farzamnia, A. Developing a Deep Neural Network for Driver Fatigue Detection Using EEG Signals Based on Compressed Sensing. Sustainability 2022, 14, 2941. [Google Scholar] [CrossRef]
- Islam, S.R.; Maity, S.P.; Ray, A.K.; Mandal, M. Deep learning on compressed sensing measurements in pneumonia detection. Int. J. Imaging Syst. Technol. 2022, 32, 41–54. [Google Scholar] [CrossRef]
- Finn, C.; Abbeel, P.; Levine, S. Model-Agnostic Meta-Learning for Fast Adaptation of Deep Networks. arXiv 2017, arXiv:1703.03400. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Meanings |
|---|---|
| the original signal | |
| the observation model | |
| the observed vector | |
| the generated signal | |
| the generative model | |
| the input of generative model from normalized the observed vector | |
| the input that is optimized | |
| the observed vector that is optimized | |
| the Euclidean norm | |
| the loss of generative model | |
| the loss of observation model | |
| the inner loop optimization rate | |
| the outer loop optimization rate | |
| the parameter of model | |
| T | the inner loop iteration |
| N | the outer loop iteration |
| the loss of inner loop | |
| the loss of outer loop |
| Method | Input | Models Combination | Type | Purpose |
|---|---|---|---|---|
| CSGM | Random input | MLP + A | Control Group | Random input control group |
| DCS | Random input | MLP + AT | Control Group | |
| DCS | MLP + ADT | |||
| We proposed | end-to-end | MLP + A | Experimental Group | Verify the feasibility of end-to-end reconstruction under the extreme observation |
| MLP + AT | ||||
| MLP + ADT | ||||
| end-to-end | Deconv_Net + A | Experimental Group | Verify the reconstruction effect of the improved generator on the extreme observation under the end-to-end case | |
| Deconv_Net + AT | ||||
| Deconv_Net + ADT |
| Network Layer | Related Hyperparameter Settings |
|---|---|
| Input | batch_size = 64 (batch_size, sensing_dim) |
| Hidden layer 1 | Linear(sensing_dim, 256) activation function: LeakyReLU |
| Hidden layer 2 | Linear(256, 512) activation function: LeakyReLU |
| Hidden layer 3 | Linear(512, 784) activation function: Tanh |
| output | (batch_size,1, 28, 28) |
| Network Layer | Related Hyperparameter Settings |
|---|---|
| Input | batch_size = 64 (batch_size, sensing_dim) |
| upsampling 1 | scale_factor: 2 |
| deconvolution layer 1 | kernel_size: (128, 3 × 3), stride_size: 1, padding_size: 1 activation function: LeakyReLU |
| upsampling 2 | scale_factor: 2 |
| deconvolution layer 2 | kernel_size: (64, 3 × 3), stride_size: 1, padding_size: 1 activation function: LeakyReLU |
| deconvolution layer 3 | kernel_size: (1, 3 × 3), stride_size: 1, padding_size: 1 activation function: Tanh |
| output | (batch_size, 1, 28, 28) |
| Network Layer | Related Hyperparameter Settings |
|---|---|
| Input | batch_size = 64 (batch_size,1, 28, 28) |
| Hidden layer 1 | Linear(784, 512) activation function: LeakyReLU |
| Hidden layer 2 | Linear(512, 256) activation function: LeakyReLU |
| Hidden layer 3 | Linear(256, sensing_dim) |
| output | (batch_size, sensing_dim) |
| Category | Versions |
|---|---|
| operating system | Windows10 |
| CPU | Core i5-10400 2.9 GHz |
| GPU | NVIDIA RTX2070SUPER 8G |
| Python | python3.8 |
| Pytorch | pytorch1.10 |
| CUDA | CUDA version10.2 |
| cuDNN | cuDNN7.6.5 |
| Compression Ratio (Number of Observations) | 75% (196) | 80% (157) | 85% (118) | 90% (78) | 95% (39) | 98% (16) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Accuracy | SSIM | Accuracy | SSIM | Accuracy | SSIM | Accuracy | SSIM | Accuracy | SSIM | Accuracy | SSIM | |
| A | 99.76% | 0.9746 | 99.61% | 0.9710 | 99.54% | 0.9701 | 99.05% | 0.9217 | 97.96% | 0.5997 | 93.82% | 0.5901 |
| AT | 99.76% | 0.9829 | 99.67% | 0.9731 | 99.68% | 0.9784 | 99.60% | 0.9775 | 99.27% | 0.9659 | 97.91% | 0.9008 |
| ADT | 99.62% | 0.9794 | 99.72% | 0.9868 | 99.75% | 0.9859 | 99.60% | 0.9817 | 99.48% | 0.9775 | 98.45% | 0.9353 |
| Observation Model | A | AT | ADT | |
|---|---|---|---|---|
| Reconstruction accuracy | random input | 83.80% | 84.95% | 83.86% |
| end-to-end input | 87.07% | 89.54% | 91.61% | |
| SSIM | random input | 0.3491 | 0.3501 | 0.3803 |
| end-to-end input | 0.4517 | 0.5847 | 0.7032 | |
| Average loss | random input | 70.3399 | 53.0402 | 53.2837 |
| end-to-end input | 47.4702 | 33.8370 | 28.4777 | |
| Method | Compression Ratio (Number of Observations) | 90% (78) | 95% (39) | 98% (16) | 99.5% (4) | ||||
|---|---|---|---|---|---|---|---|---|---|
| Accuracy | SSIM | Accuracy | SSIM | Accuracy | SSIM | Accuracy | SSIM | ||
| CSGM | MLP + A | 96.57% | 0.7588 | 96.40% | 0.6518 | 91.63% | 0.5721 | 79.15% | 0.3026 |
| DCS | MLP + AT | 98.54% | 0.9061 | 97.75% | 0.8680 | 96.94% | 0.8139 | 89.58% | 0.5757 |
| DCS | MLP + ADT | 98.49% | 0.8980 | 97.65% | 0.8879 | 97.51% | 0.8602 | 93.88% | 0.6898 |
| We proposed | Conv + A | 98.60% | 0.8793 | 97.42% | 0.7365 | 94.10% | 0.6850 | 81.94% | 0.3430 |
| Conv + AT | 98.77% | 0.9206 | 98.45% | 0.9081 | 97.32% | 0.8340 | 93.40% | 0.6441 | |
| Conv + ADT | 99.23% | 0.9427 | 98.67% | 0.9152 | 98.00% | 0.8618 | 94.74% | 0.7405 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Diao, H.; Lin, X.; Fang, C. Deep Compressed Sensing Generation Model for End-to-End Extreme Observation and Reconstruction. Appl. Sci. 2022, 12, 12176. https://doi.org/10.3390/app122312176
Diao H, Lin X, Fang C. Deep Compressed Sensing Generation Model for End-to-End Extreme Observation and Reconstruction. Applied Sciences. 2022; 12(23):12176. https://doi.org/10.3390/app122312176
Chicago/Turabian StyleDiao, Han, Xiaozhu Lin, and Chun Fang. 2022. "Deep Compressed Sensing Generation Model for End-to-End Extreme Observation and Reconstruction" Applied Sciences 12, no. 23: 12176. https://doi.org/10.3390/app122312176