
Differential Evolution Applied to a Multilevel Inverter—A Case Study

 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
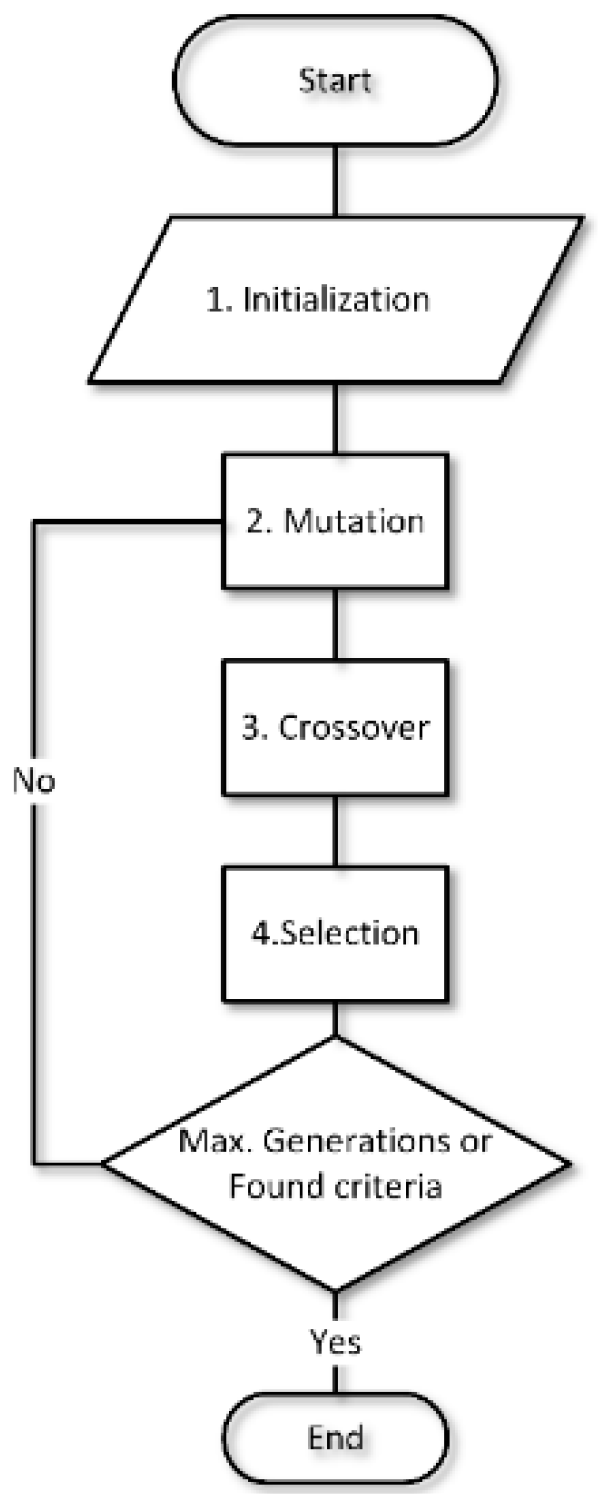
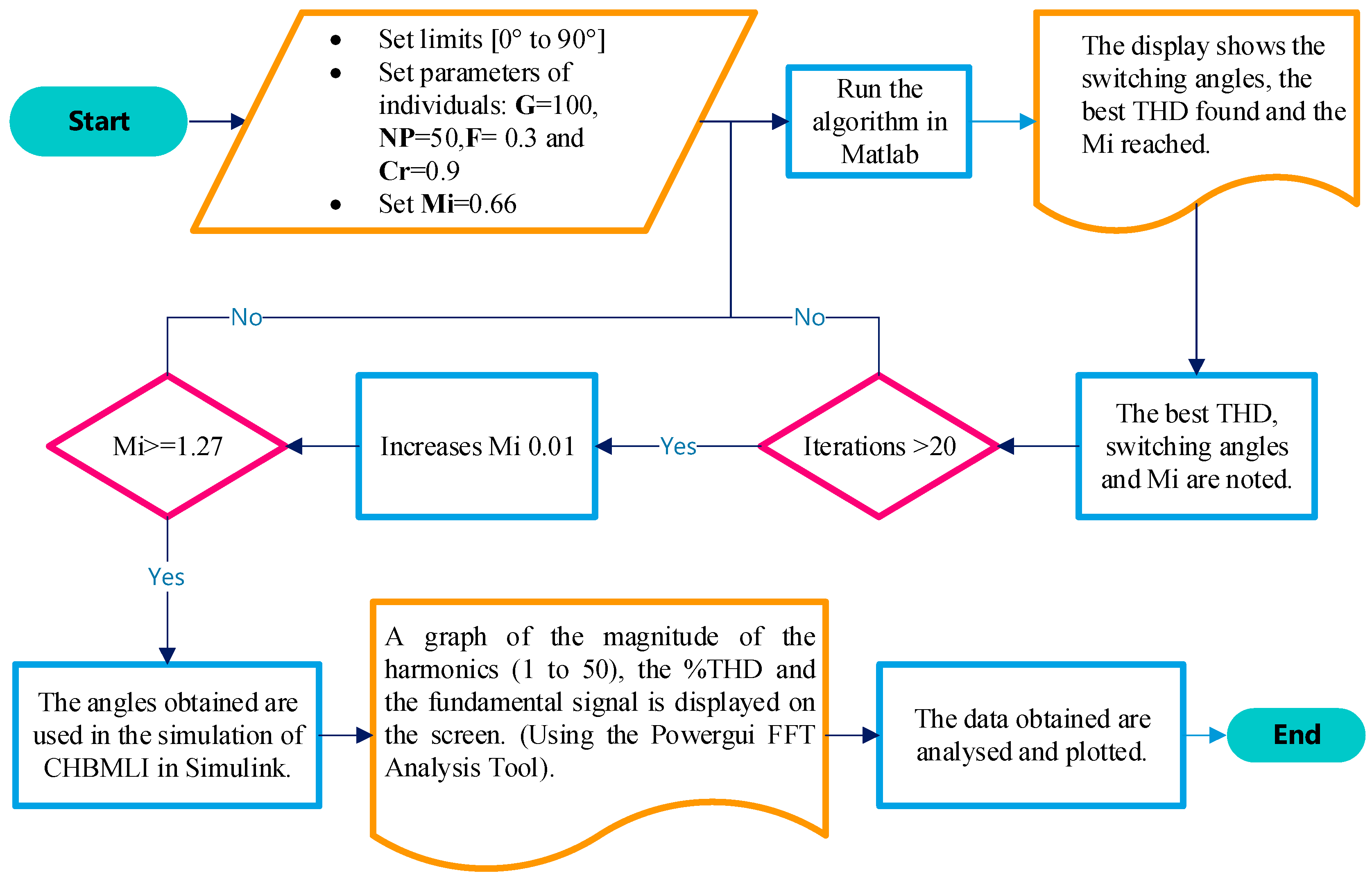
2.1. Differential Evolution Algorithm
- 2.
- Mutation: In this process, three vectors are randomly selected, and the first two vectors are subtracted from each other (this is to define a search direction). The difference is multiplied by the scale factor or “F”, which can vary between zero and one [12]. To the resulting vector, the third vector is added [21], as in the following equation:
- 3.
- Crossover: A new vector called the test vector (child vector) is generated, using a crossover factor Cr with values between 0 and 1 and defining the degree of similarity of the test vector to the mutant or parent vector. If Cr is close to 1, the test vector will be quite similar to the mutant vector; if Cr is close to 0, it will be similar to the parent vector [19,20].
- 4.
2.2. Optimization Problem Statement
- Objective function: the property to be optimized, which can be expressed as a linear or non-linear function.
- Decision variable: an unknown element of an optimization problem.
- Constraints: restrictions that must be satisfied to produce an acceptable result.
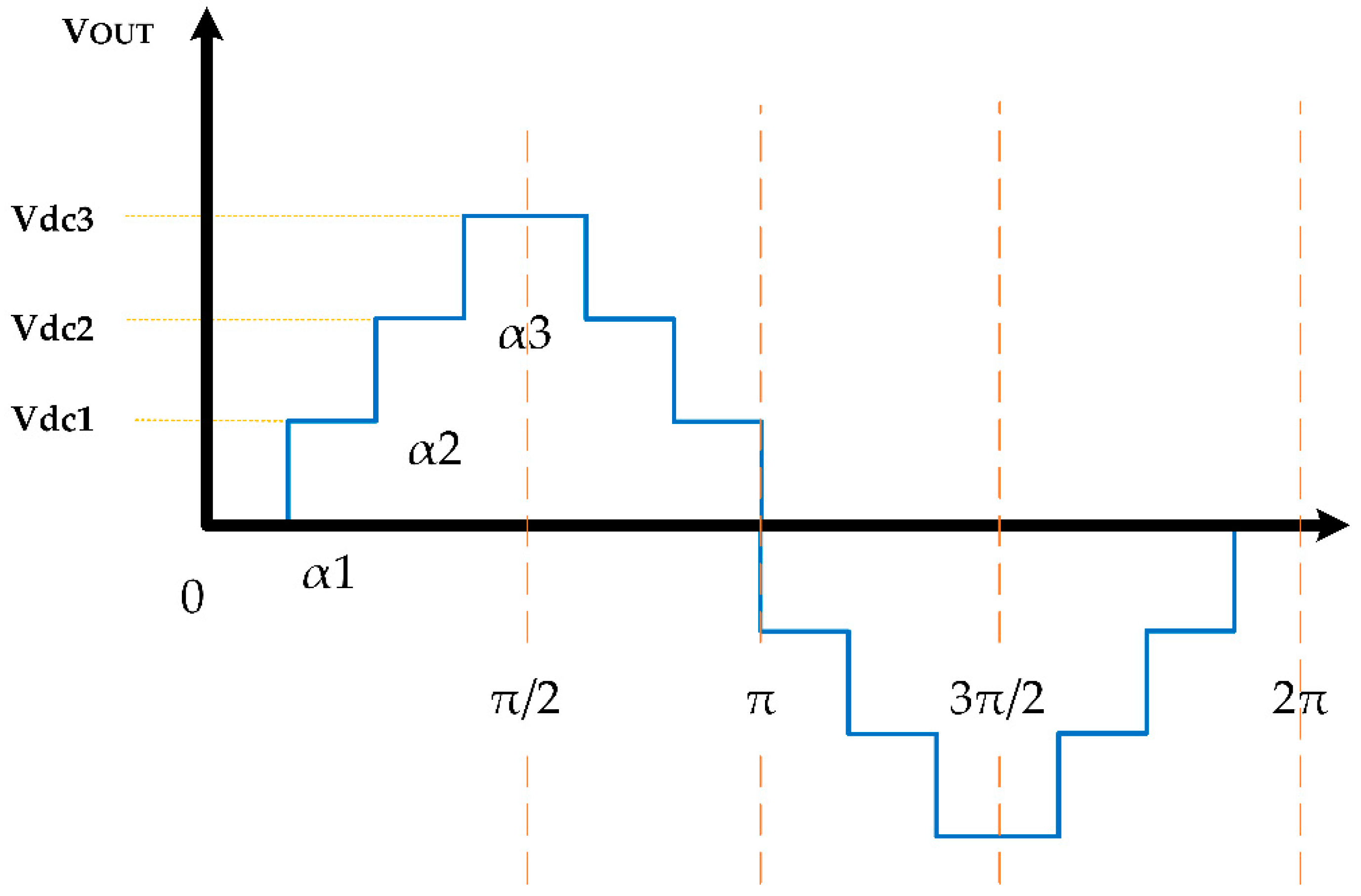
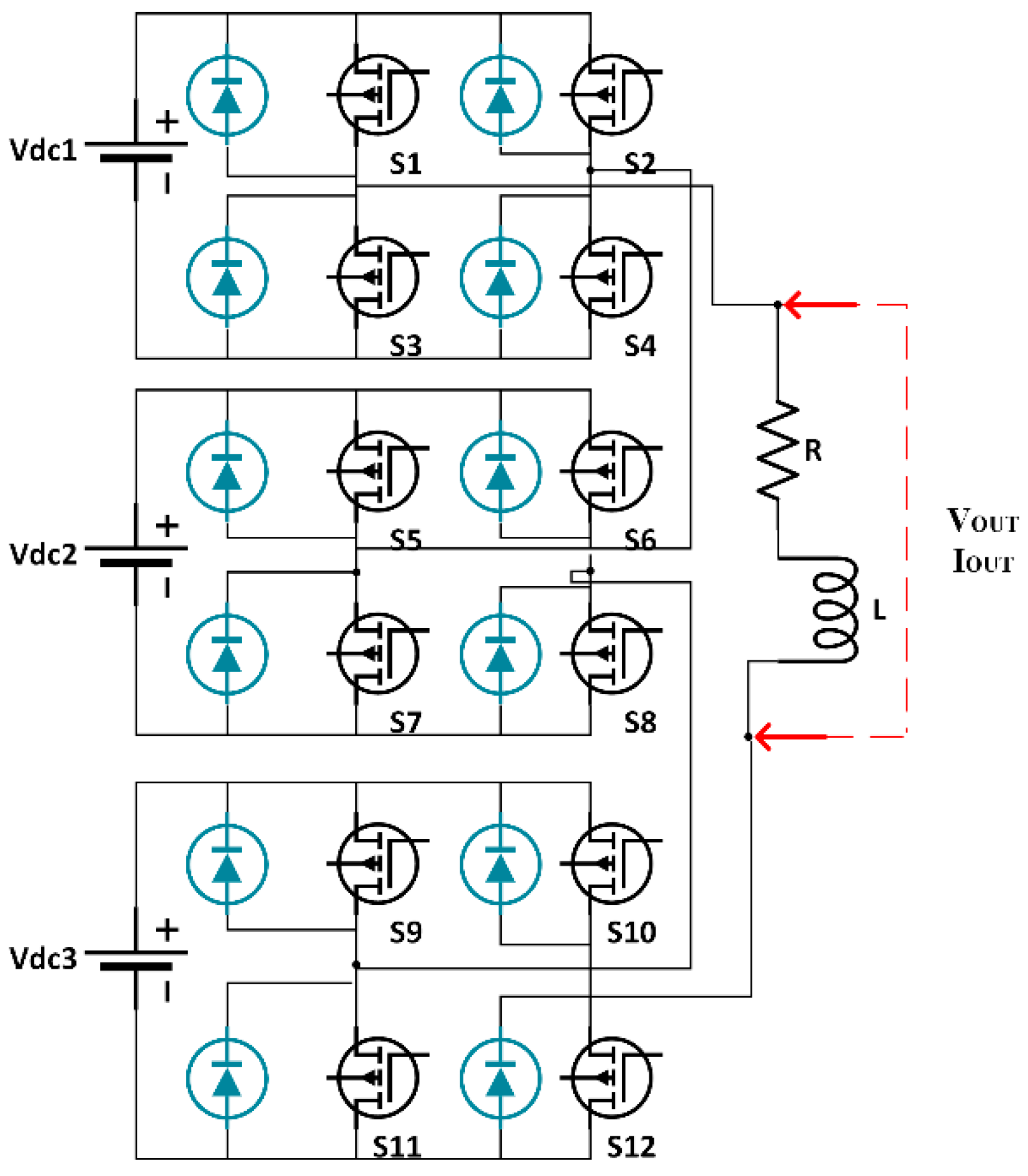
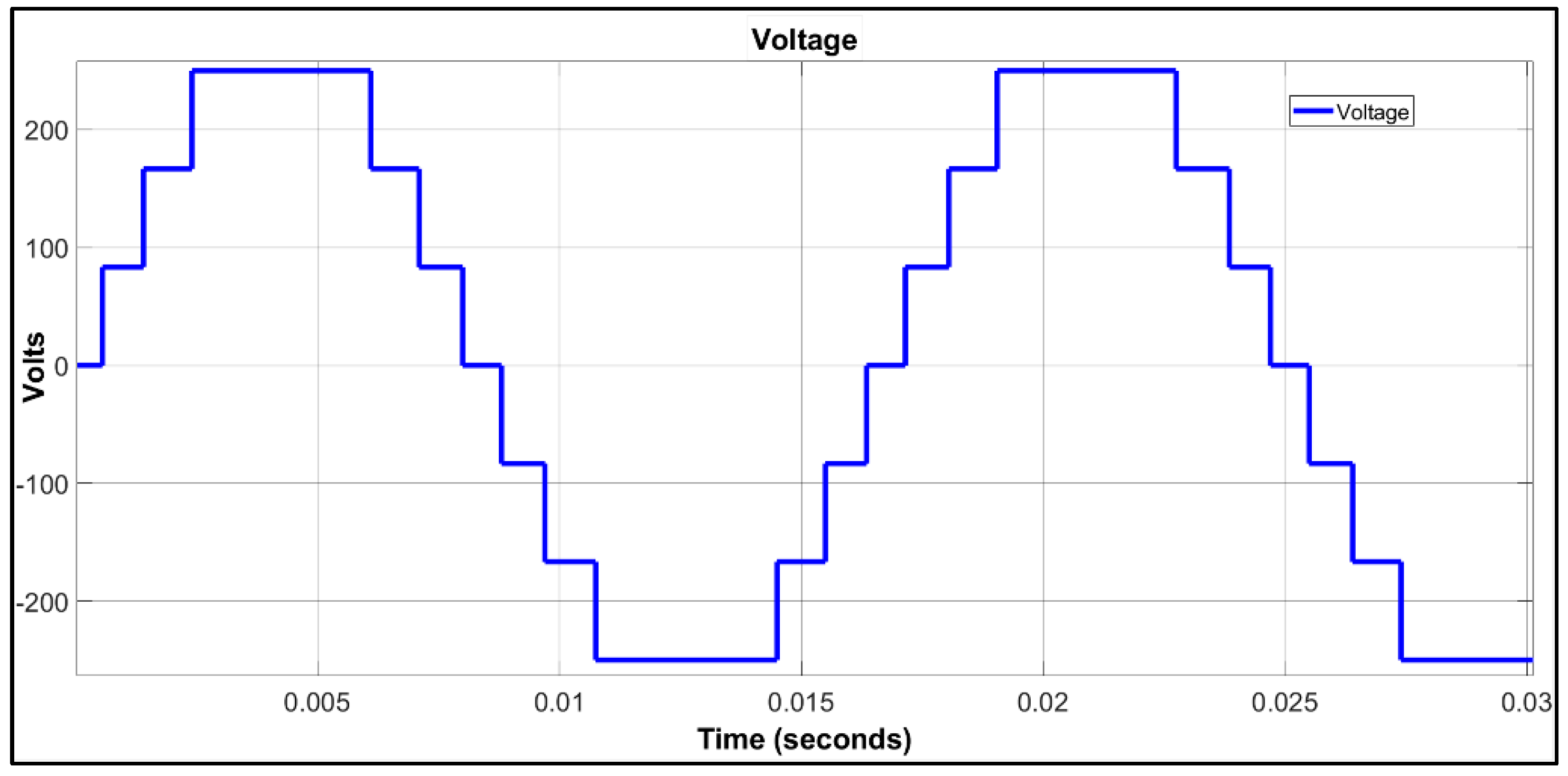
2.3. Structure of the Seven-Level Cascaded Multilevel Inverter: Case Study
- Switching states can be changed to compensate for faults.
- Input capacitors have no voltage balance problems [30].
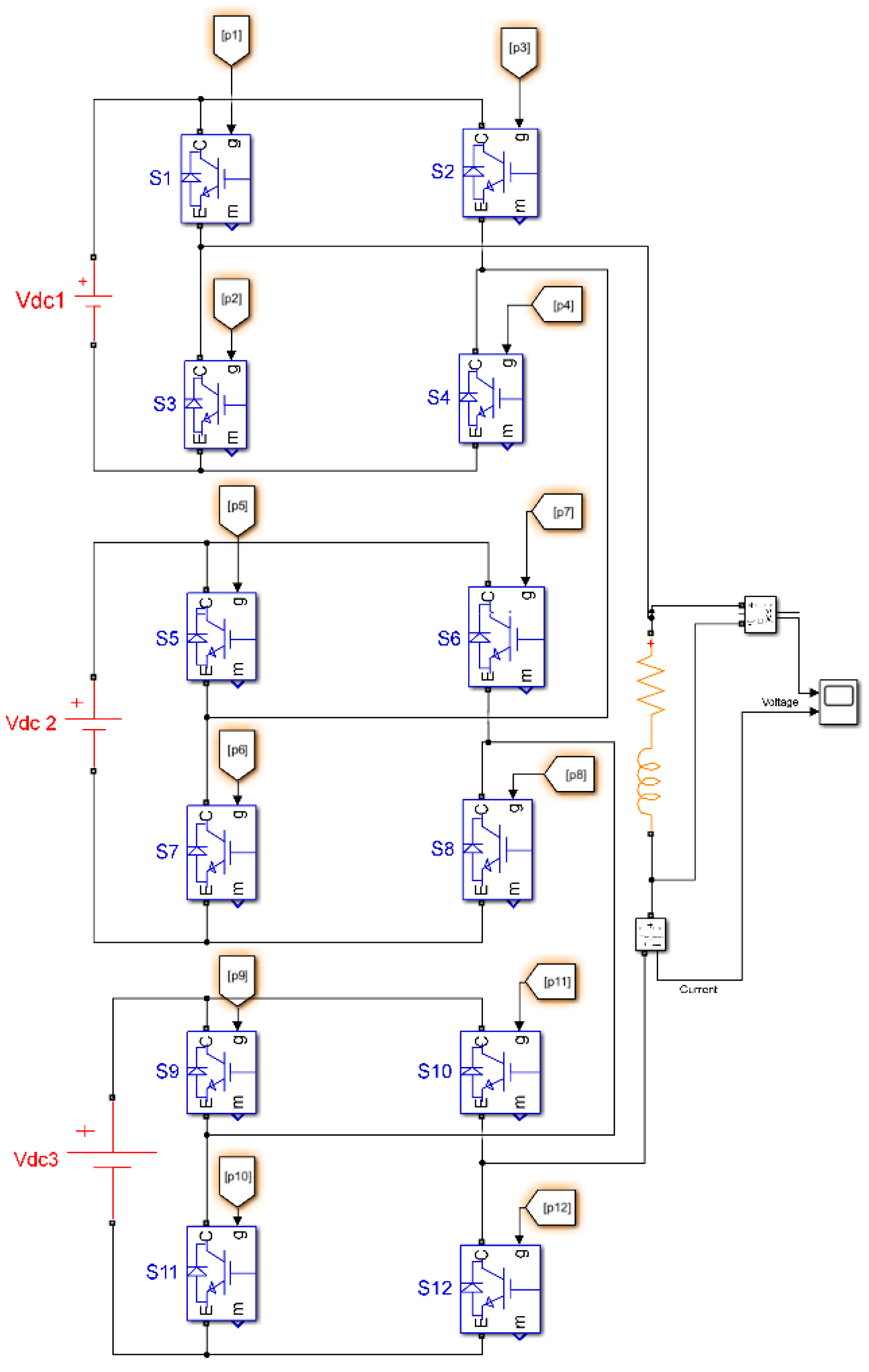
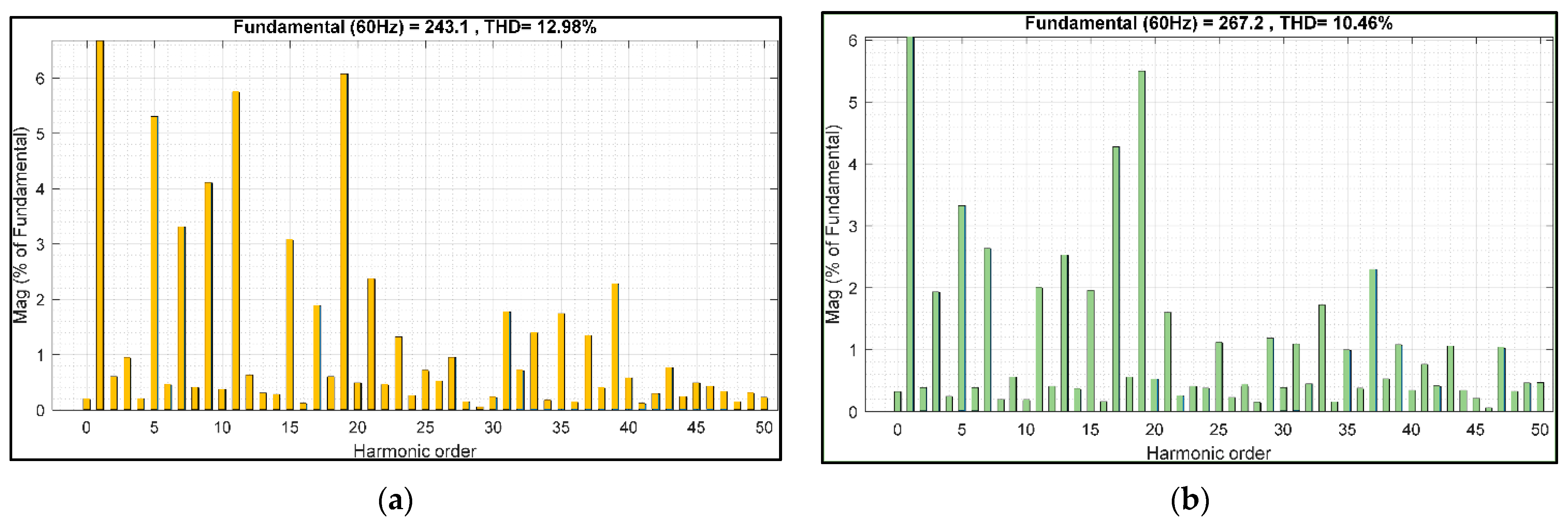
3. Simulation Results
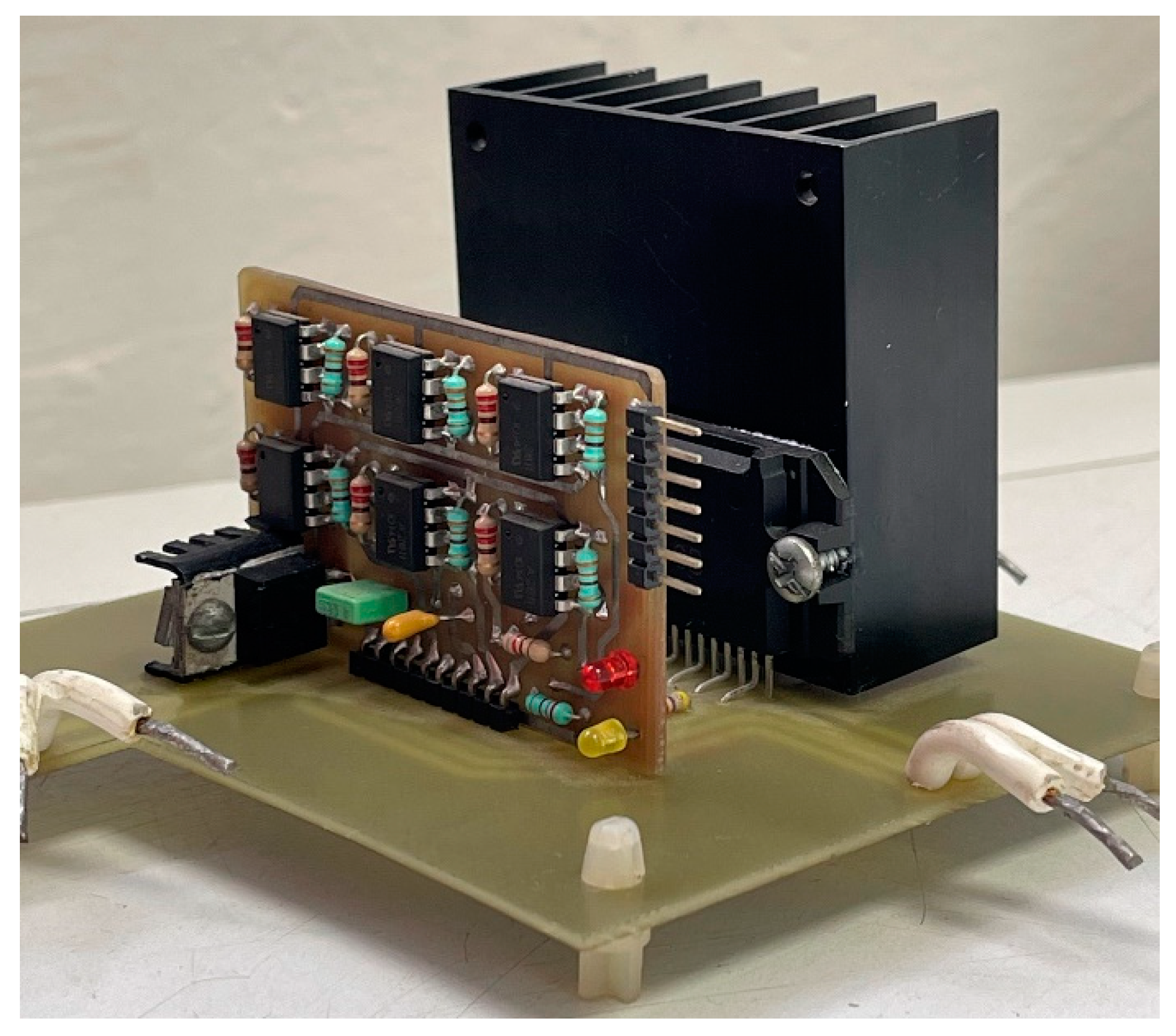
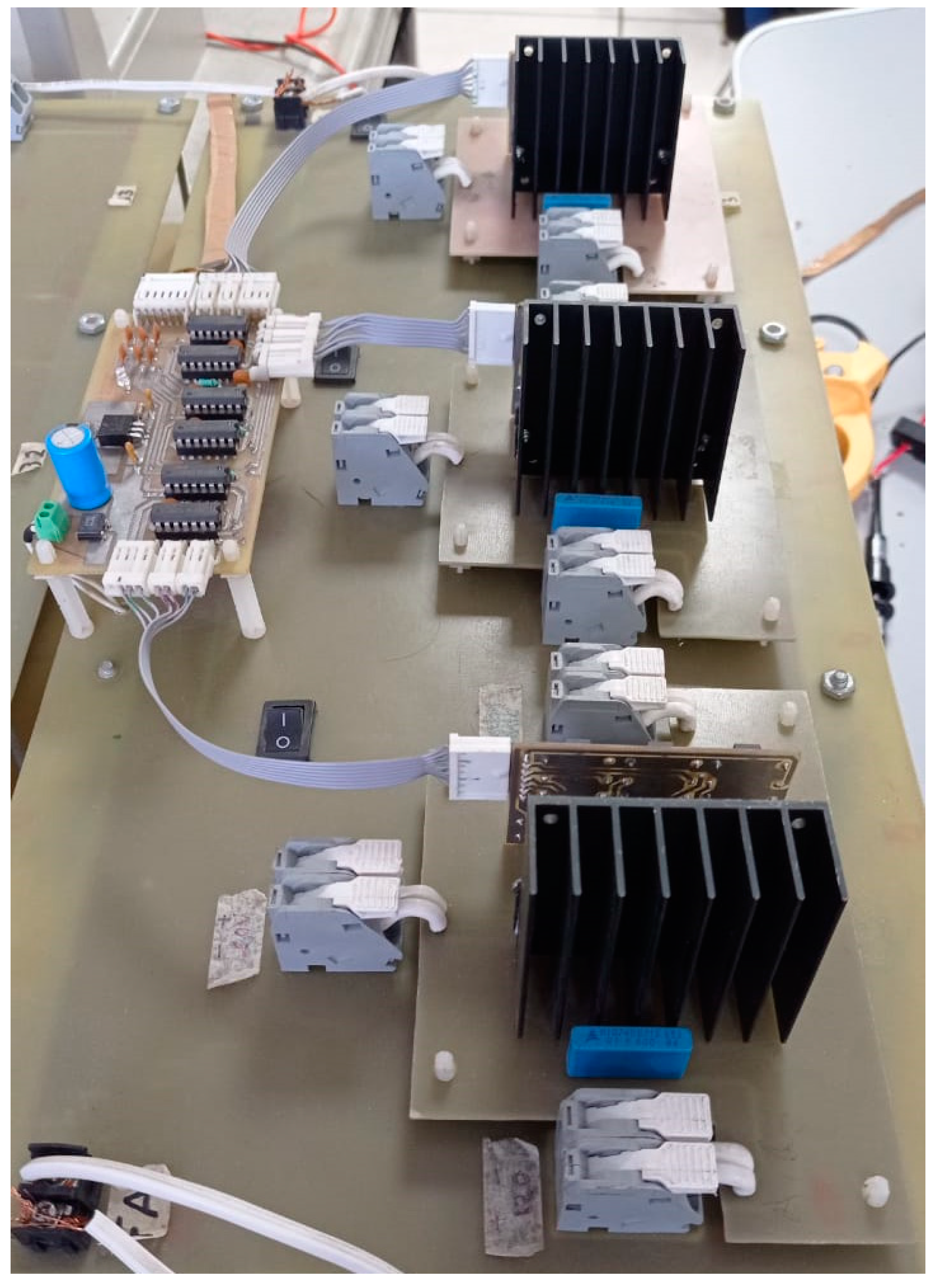
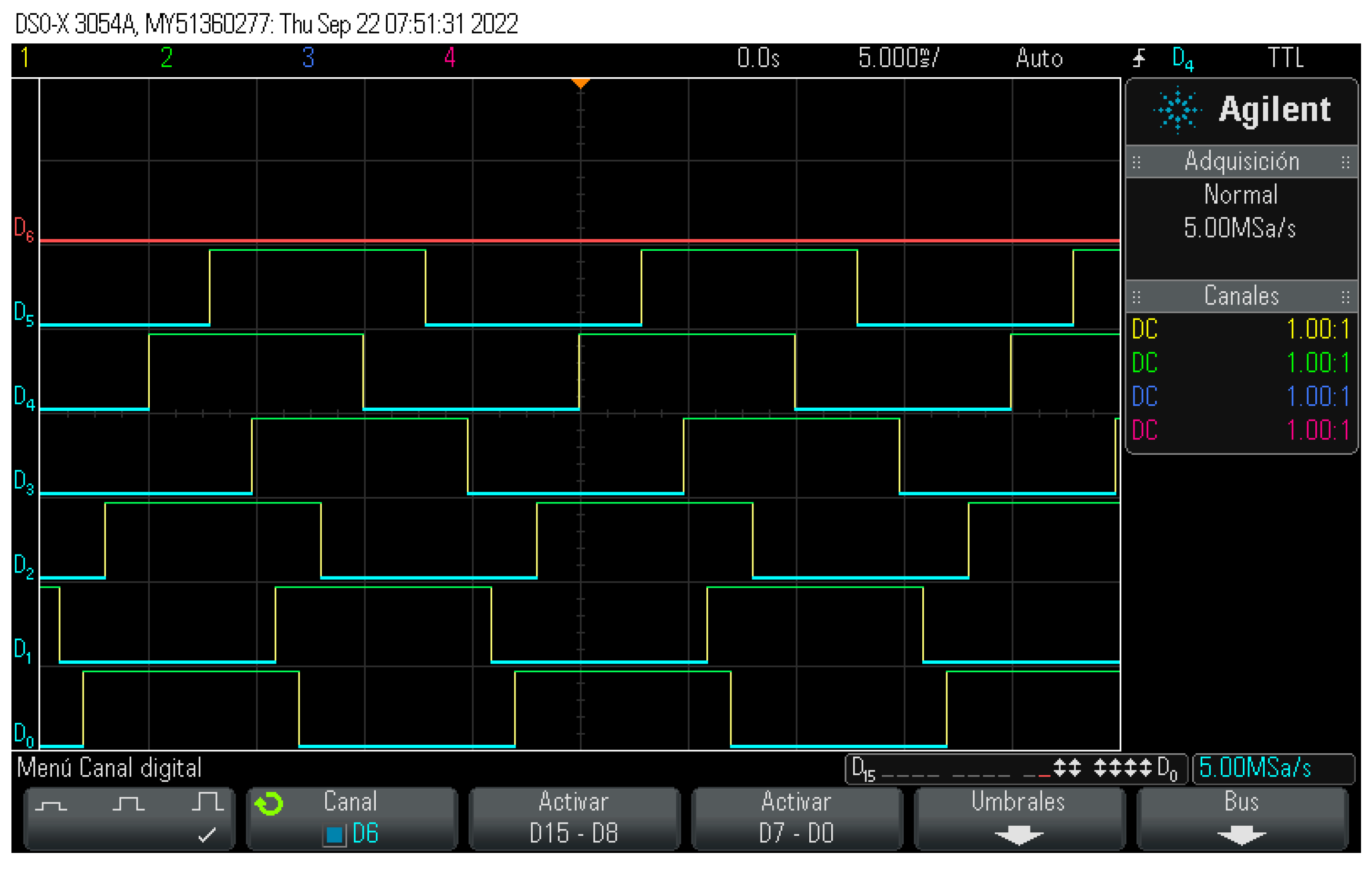
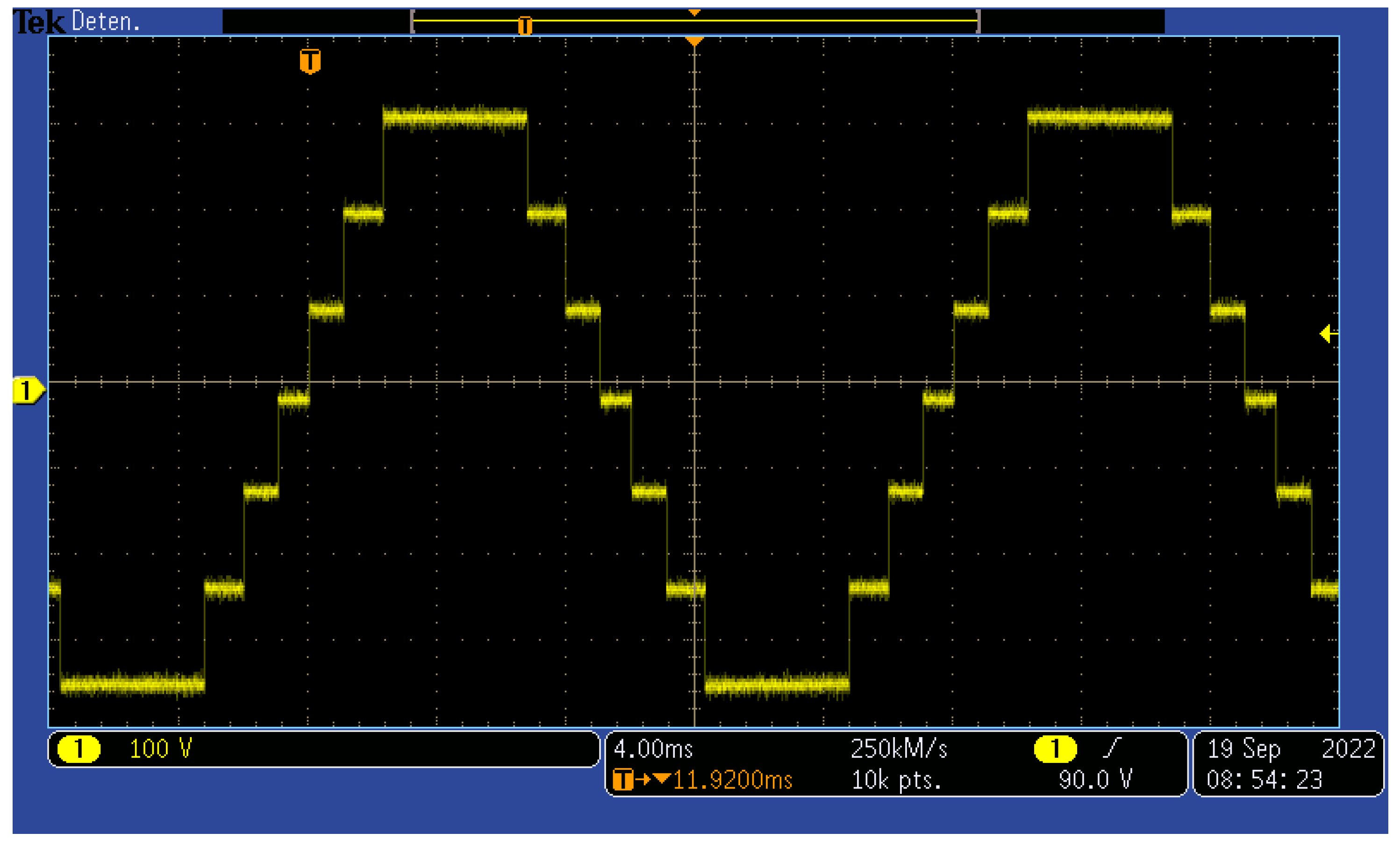
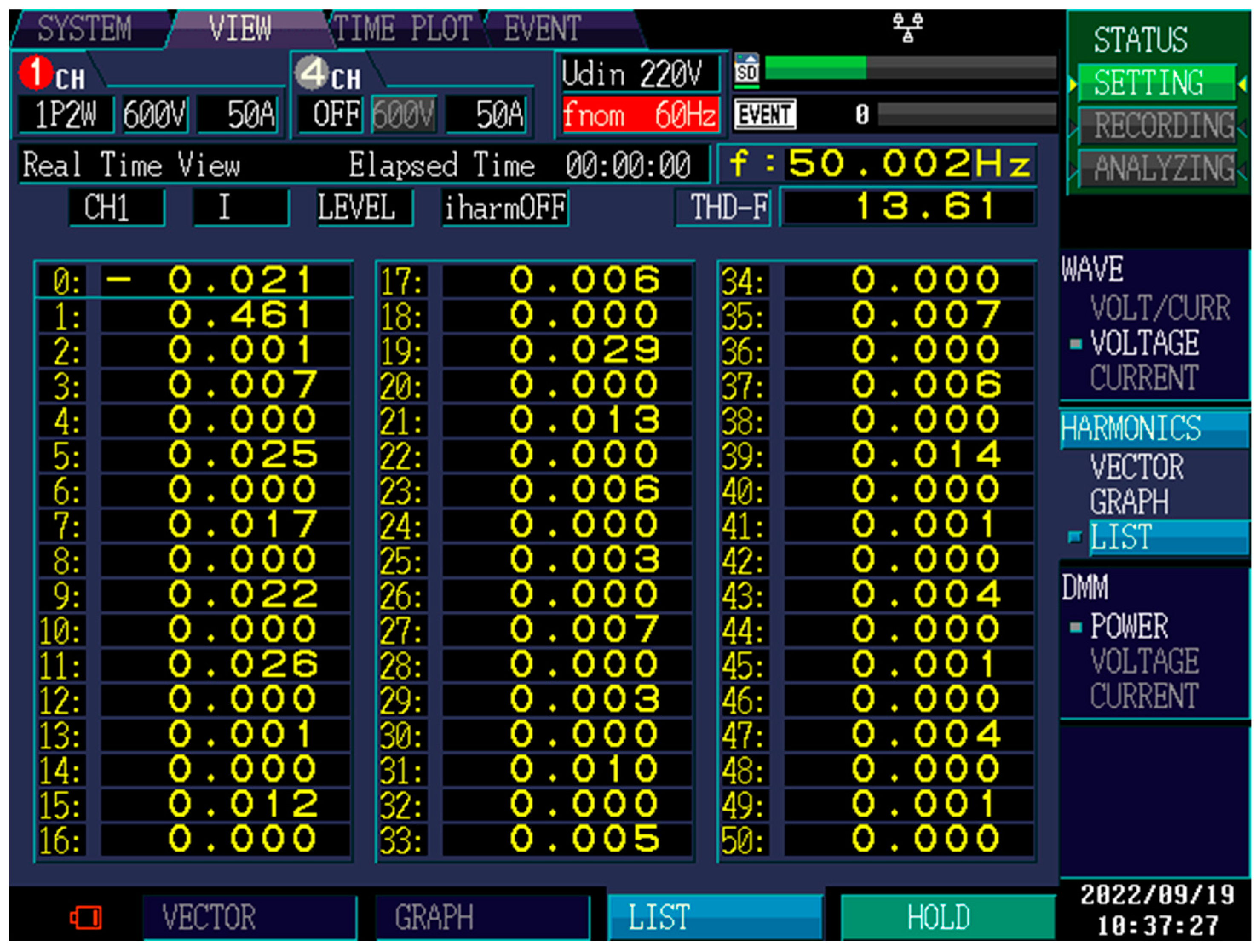
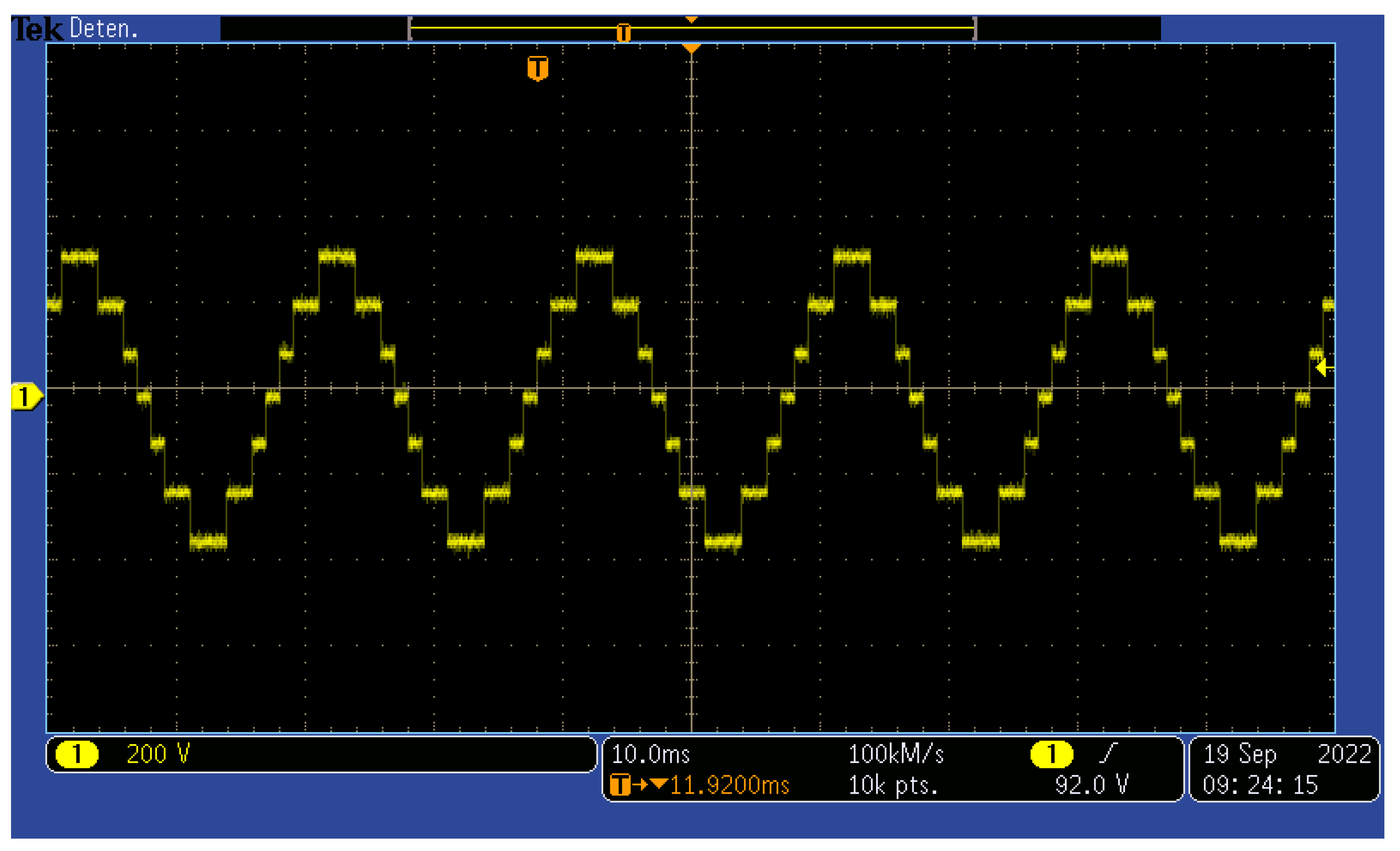
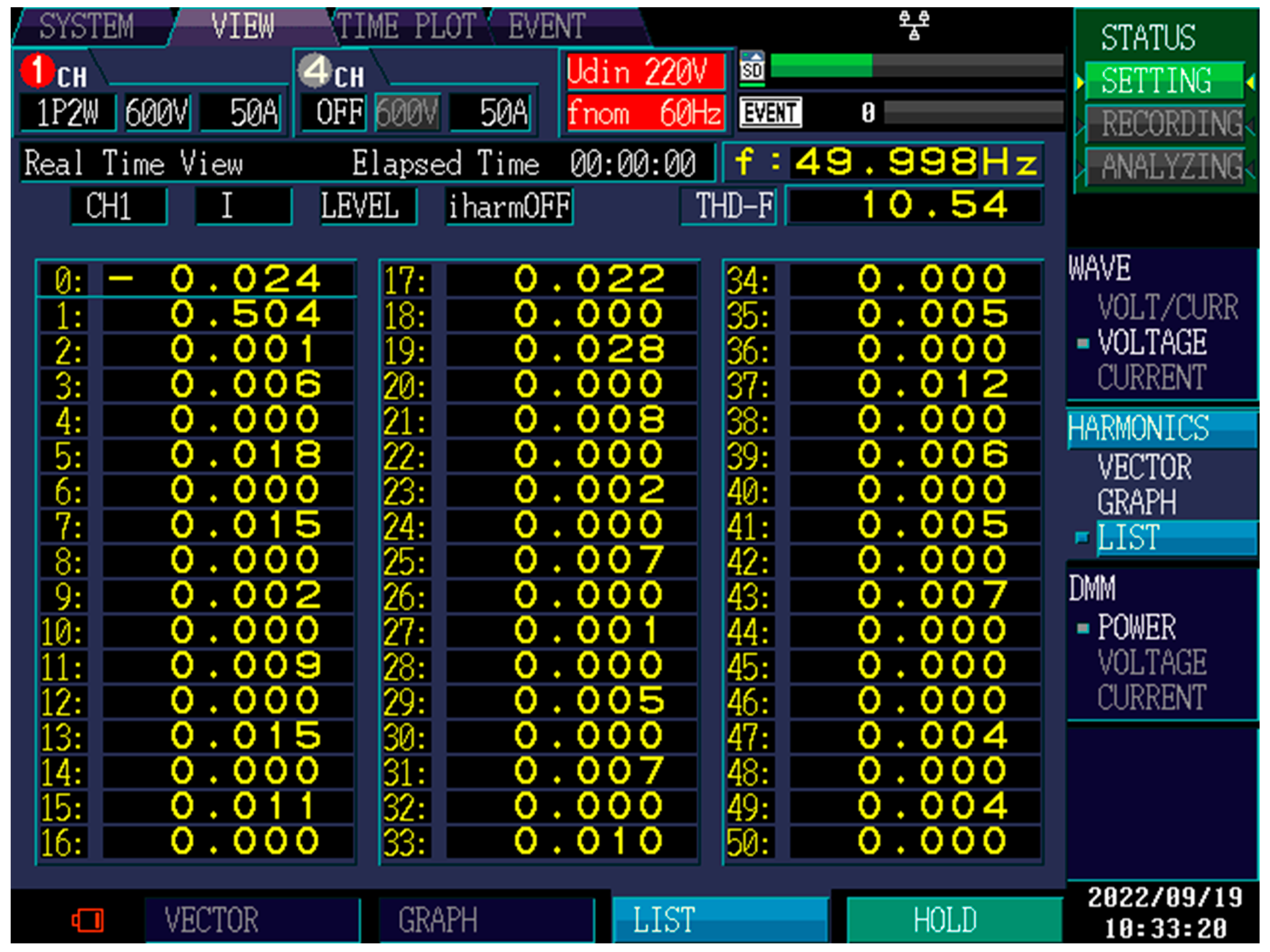
4. Experimental Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kumar, D.; Gandhi, B.G.R.; Bhattacharjya, R.K. Firefly Algorithm and Its Applications in Engineering Optimization. In Nature-Inspired Methods for Metaheuristics Optimization, Algorithms and Applications in Science and Engineering; Bennis, F., Bhattacharjya, R.K., Eds.; Springer: Berlin/Heidelberg, Germany, 2020; Volume 16, p. 503. [Google Scholar]
- Qing, A.; Lee, C.K. Differential Evolution in Electromagnetics; Springer: Berlin/Heidelberg, Germany, 2010; Volume 4. [Google Scholar]
- Qing, A. Differential Evolution Fundamentals and Applications in Electrical Engineering; John Wiley & Sons (Asia) Pte Ltd.: Hoboken, NJ, USA, 2009; ISBN 9780470823941. [Google Scholar]
- Kabalci, E. Multilevel Inverters Introduction and Emergent Topologies. In Multilevel Inverters; Kabalci, E., Ed.; Academic Press: Cambridge, MA, USA, 2021; pp. 1–27. ISBN 9780128216682. [Google Scholar]
- Upadhyay, D.; Khan, S.A.; Ali, M.; Tariq, M.; Sarwar, A.; Chakrabortty, R.K.; Ryan, M.J. Experimental Validation of Metaheuristic and Conventional Modulation, and Hysteresis Control of the Dual Boost Nine-Level Inverter. Electronics 2021, 10, 207. [Google Scholar] [CrossRef]
- Salam, Z.; Amjad, A.M.; Majed, A. Using Differential Evolution to Solve the Harmonic Elimination Pulse Width Modulation for Five Level Cascaded Multilevel Voltage Source Inverter. In Proceedings of the 1st International Conference on Artificial Intelligence, Modelling and Simulation, Kota Kinabalu, Malaysia, 3–5 December 2013; pp. 43–48. [Google Scholar]
- Pawar, S.V.; Morteza, S. Harmonic Elimination in Cascade Multilevel Inverter with Non Equal Dc Sources Using Genetic and Differential Evolution Algorithm. Int. J. Innov. Sci. Eng. Technol. 2015, 2, 144–150. [Google Scholar]
- Amjad, A.M.; Salam, Z.; Saif, A.M.A. Application of differential evolution for cascaded multilevel VSI with harmonics elimination PWM switching. Int. J. Electr. Power Energy Syst. 2015, 64, 447–456. [Google Scholar] [CrossRef]
- Chabni, F.; Taleb, R.; Helaimi, M.H. Differential Evolution based SHEPWM for SevenLevel Inverter with Non-Equal DC Sources. Int. J. Adv. Comput. Sci. Appl. 2016, 7, 304–311. [Google Scholar] [CrossRef] [Green Version]
- Jamuna, P.; Rajan, C.C.A. A Heuristic Method: Differential Evolution for Harmonic Reduction in Multilevel Inverter System. Int. J. Comput. Electr. Eng. 2013, 5, 482–486. [Google Scholar] [CrossRef] [Green Version]
- Sudha Letha, S.; Thakur, T.; Kumar, J. Harmonic Elimination in a Solar Powered Cascaded Multilevel Inverter Using Genetic Algorithm and Differential Evolution Optimization Techniques. In ASME International Mechanical Engineering Congress and Exposition; American Society of Mechanical Engineers: New York, NY, USA, 2015. [Google Scholar]
- Majed, A.; Salam, Z.; Amjad, A.M. Harmonics elimination PWM based direct control for 23-level multilevel distribution STATCOM using differential evolution algorithm. Electr. Power Syst. Res. 2017, 152, 48–60. [Google Scholar] [CrossRef]
- Storn, R.M.; Price, K.V. Differential Evolution—A Simple and Efficient Adaptive Scheme for Global Optimization Over Continuous Spaces; Technical Report TR-95–012; International Computer Science Institute: Berkeley, CA, USA, 1995. [Google Scholar]
- Gutiérrez, D.; López, J.M.; Villa, W.M. Metaheuristic Techniques Applied to the Optimal Reactive Power Dispatch: A Review. IEEE Lat. Am. Trans. 2016, 14, 11. [Google Scholar] [CrossRef]
- Zhang, J.; Sanderson, A.C. Adaptive Differential Evolution: A Robust Approach to Multimodal Problem Optimization (Adaptation, Learning, and Optimization, 1); Springer: Berlin/Heidelberg, Germany, 2009; Volume 1. [Google Scholar]
- Medina, I.R. Algoritmos Bioinspirados: Una Revisión Según sus Fundamentos Biológicos; University of Manchester: Hong Kong, China, 2014. [Google Scholar]
- Bałchanowski, M.; Boryczka, U. Aggregation of Rankings Using Metaheuristics in Recommendation Systems. Electronics 2022, 11, 369. [Google Scholar] [CrossRef]
- Bilal; Pant, M.; Zaheer, H.; Garcia-Hernandez, L.; Abraham, A. Differential Evolution: A review of more than two decades of research. Eng. Appl. Artif. Intell. 2020, 90, 103479. [Google Scholar] [CrossRef]
- Price, K.; Storn, R.; Lampinen, J. Differential Evolution A Practical Approach to Global Optimization; Springer: Alemania, Germany, 2005; p. 542. ISBN 978-3-540-31306-9. [Google Scholar]
- Malik, H.; Iqbal, A.; Joshi, P.; Agrawal, S.; Bakhsh, F.I. Metaheuristic and Evolutionary Computation: Algorithms and Applications; Springer Nature: Singapore, 2021; p. 830. ISBN 978-981-15-7571-6. [Google Scholar]
- Montes, E.M. Paradigmas emergentes en algoritmos bio-inspirados. In Inteligencia Aritificial; Alfaomega, Ed.; Alfaomega: Mexico City, Mexico, 2006; pp. 504–533. [Google Scholar]
- Ronkkonen, J.; Kukkonen, S.; Price, K.V. Real-Parameter Optimization with Differential Evolution. In Proceedings of the IEEE Congress on Evolutionary Computation, Edinburgh, UK, 2–5 September 2005; p. 8. [Google Scholar]
- Castillo, E.J. Esquema Adaptativo para el Manejo de Restricciones de Límite en Problemas de Optimización Numérica Restringida. Ph.D. Thesis, Centro de Investigación en Inteligencia Artificial Universidad Veracruzana Xalapa, Veracruz, Mexico, 2019. [Google Scholar]
- Juárez-Castillo, E.; Pérez-Castro, N.; Mezura-Montes, E. An Improved Centroid-Based Boundary Constraint-Handling Method in Differential Evolution for Constrained Optimization. Int. J. Pattern Recognit. Artif. Intell. 2017, 31, 1759023. [Google Scholar] [CrossRef]
- Yong, J. Optimization Theory a Concise Introduction; World Scientific Publishing Co. Pte. Ltd.: Singapore, 2018; ISBN 9813237643. [Google Scholar]
- Chong, E.K.P.; Zak, S.H. An Introduction To Optimization, 4th ed.; John Wiley & Sons, Inc. Publication: Hoboken, NJ, USA, 2013; ISBN 978-1-118-27901-4. [Google Scholar]
- Sánchez Vargas, O.; De León Aldaco, S.E.; Aguayo Alquicira, J.; López Núñez, A.R. Evolutionary Metaheuristic Methods Applied to Minimize the THD in Inverters: A Systematic Review. Eur. J. Electr. Eng. 2021, 23, 237–245. [Google Scholar] [CrossRef]
- Hamzah, H.H.; Ponniran, A.; Kasiran, A.N.; Harimon, M.A.; Gendum, D.A.; Yatim, M.H. A Single Phase 7-Level Cascade Inverter Topology with Reduced Number of Switches on Resistive Load by Using PWM. J. Phys. Conf. Ser. 2018, 995, 012061. [Google Scholar] [CrossRef]
- Siddiqui, N.I.; Alam, A.; Quayyoom, L.; Sarwar, A.; Tariq, M.; Vahedi, H.; Ahmad, S.; Mohamed, A.S.N. Artificial Jellyfish Search Algorithm-Based Selective Harmonic Elimination in a Cascaded H-Bridge Multilevel Inverter. Electronics 2021, 10, 1402. [Google Scholar] [CrossRef]
- Wei, S.; Wu, B.; Li, F.; Sun, X. Control Method for Cascaded H-Bridge Multilevel Inverter with Faulty Power Cells. In Proceedings of the Eighteenth Annual IEEE Applied Power Electronics Conference and Exposition., Miami Beach, FL, USA, 9–13 February 2003; pp. 261–267. [Google Scholar]
- Sánchez Vargas, O.S.; De León Aldaco, S.E.; Aguayo Alquicira, J.; Flores Rodríguez, E.; Lozoya Ponce, R.E. Cálculo de los ángulos óptimos de conmutación para un inversor multinivel utilizando evolución diferencial. Pist. Educ. 2022, 43, 141. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Specifications |
|---|---|
| Voltage sources (Vdc 1,2,3) | 83.33 V |
| R Load | 100 Ω |
| L Load | 100 mH |
| Power | 625 W |
| Peak Voltage (Vout) | 250 V |
| Frequency | 60 Hz |
| Parameter | Value |
|---|---|
| Population (NP) | 100 |
| Generation (G) | 100 |
| Scaling Factor (F) | 0.3 |
| Crossover rate (Cr) | 0.9 |
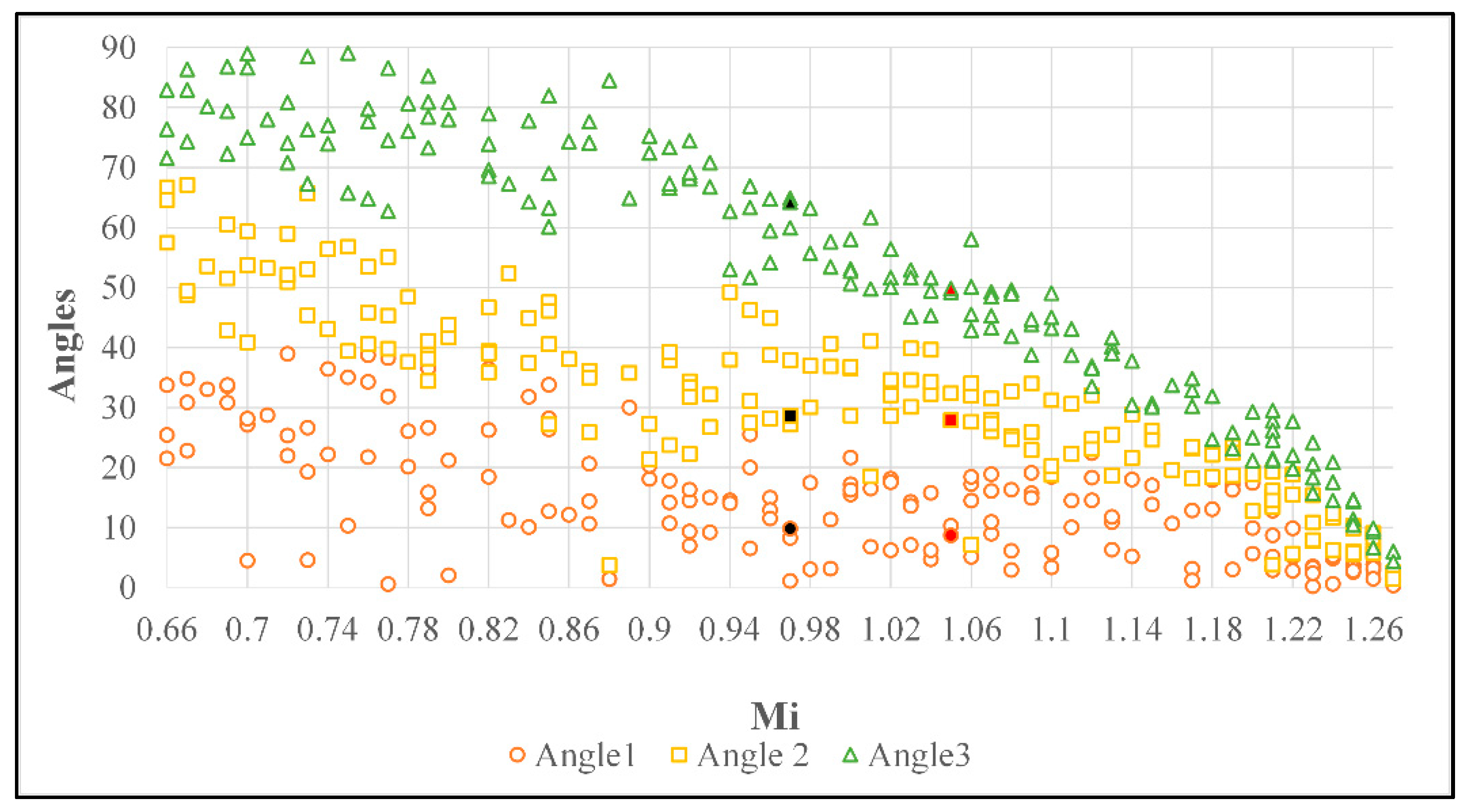
| Mi | ∝1 | ∝2 | ∝3 |
|---|---|---|---|
| 0.97 | 9.80° | 28.63° | 64.2° |
| 1.05 | 8.69° | 27.89° | 49.81° |
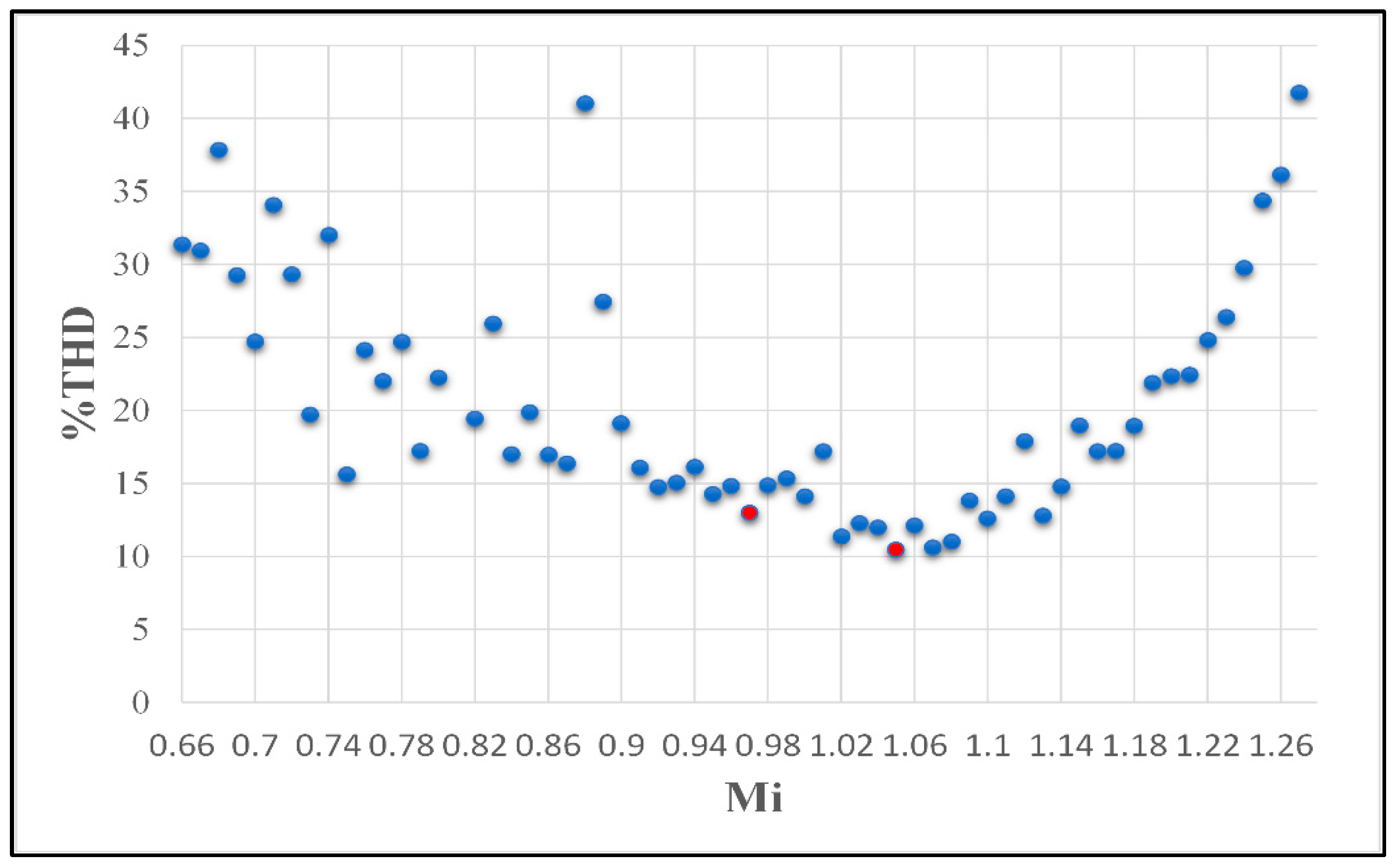
| Mi | Simulation | Experimental |
|---|---|---|
| 0.97 | 12.98 | 13.61 |
| 1.05 | 10.46 | 10.54 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sánchez Vargas, O.; De León Aldaco, S.E.; Aguayo Alquicira, J.; Vela Valdés, L.G.; Mina Antonio, J.D. Differential Evolution Applied to a Multilevel Inverter—A Case Study. Appl. Sci. 2022, 12, 9910. https://doi.org/10.3390/app12199910
Sánchez Vargas O, De León Aldaco SE, Aguayo Alquicira J, Vela Valdés LG, Mina Antonio JD. Differential Evolution Applied to a Multilevel Inverter—A Case Study. Applied Sciences. 2022; 12(19):9910. https://doi.org/10.3390/app12199910
Chicago/Turabian StyleSánchez Vargas, Oscar, Susana Estefany De León Aldaco, Jesús Aguayo Alquicira, Luis Gerardo Vela Valdés, and Jesús Darío Mina Antonio. 2022. "Differential Evolution Applied to a Multilevel Inverter—A Case Study" Applied Sciences 12, no. 19: 9910. https://doi.org/10.3390/app12199910