1. Introduction
With the deficit of fossil fuels and environmental concerns, renewable power has been widely researched and utilized in recent decades [
1,
2,
3]. Iceland and Norway obtain essentially all electricity from renewable sources, and other nations and regions are evolving towards 100% renewables [
4]. However, renewable generation also brings great challenges. On the one hand, renewable generation is stochastic and fluctuant with meteorological conditions. The system power balance is persistently disturbed by renewable generation fluctuations. On the other hand, renewable generation (such as solar photovoltaic and wind power) is commonly integrated through power electronic interfaces (PEIs), which are with almost no inertia because of its fast and accurate switches [
5]. By the increasing penetration of renewable generation, the frequency stability of the current power system deteriorates.
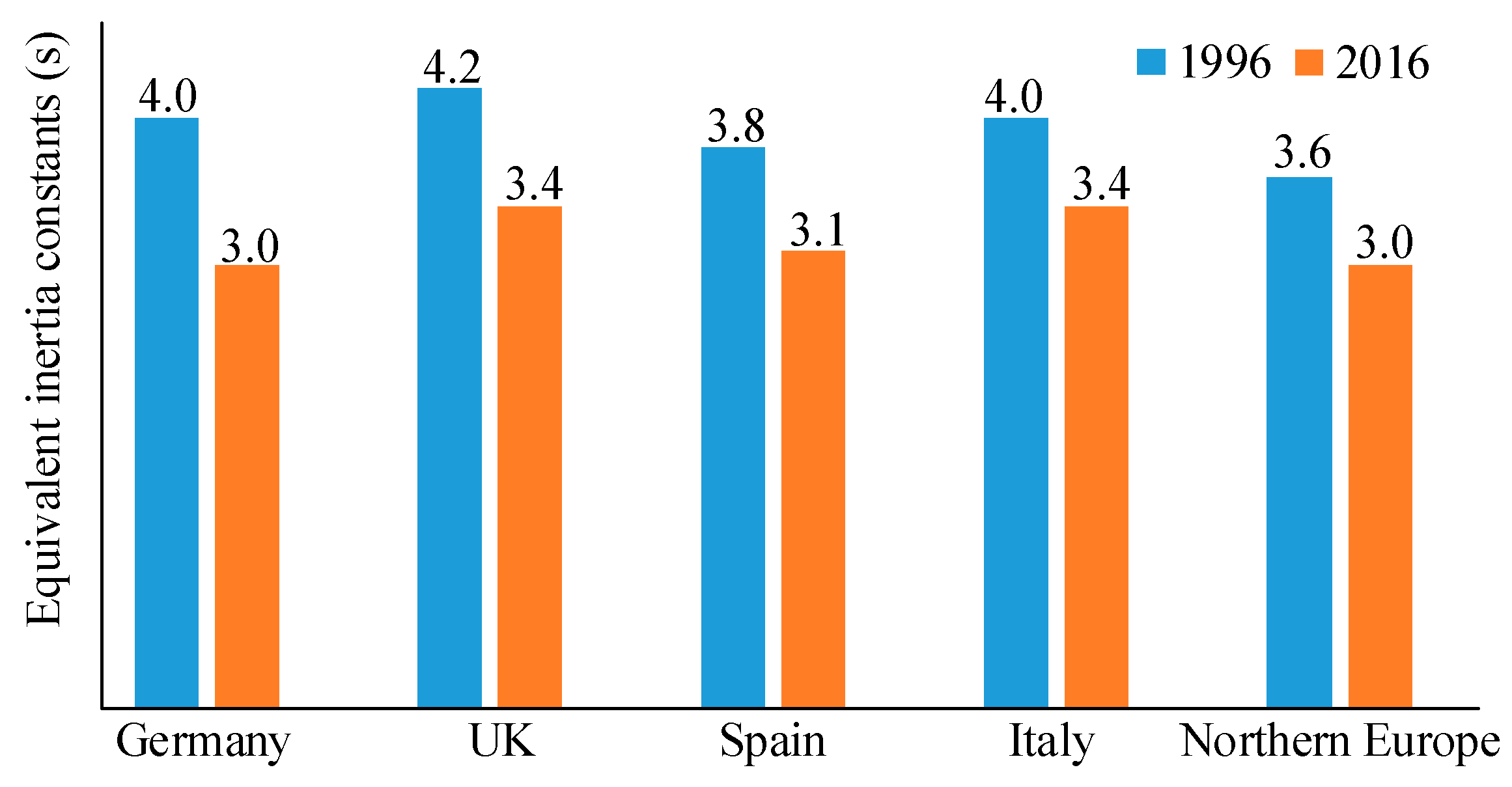
The current power system has been through transitions in intrinsic properties, one of which is represented by the decreasing of the overall inertia. The inertia is an important indicator to evaluate the strength of the power systems because inertial response (IR) can slow down the rate of change of frequency (ROCOF) and buy time for the activation of primary frequency response (PFR) to reduce nadir/peak frequency (maximum frequency deviation) [
6]. In order to tackle the loss of inertia in the inverter-based generation (IBG), the concept of the virtual synchronous generator (VSG) has been proposed [
7,
8,
9,
10,
11,
12,
13]. As the control strategies of the voltage-sourced inverters (VSIs) are commonly composed of a highly programmable supplementary controller and a double-loop controller in a cascade structure, by the implementation of the VSG algorithm, the PEI external characteristics can mimic those of synchronous generators (SGs) closely [
9]. Therefore, the well-developed theory for the operation of the SG-based power system can still be exploited for the evolving power grids [
7]. Two classical models, the ‘synchronverter’ and Ise’s, focus on the loss of inertia in conventional VSI droop control, and the emulation of the properties of the inertia and the speed-governor is implemented [
9,
11,
13]. Experiment-based studies can be found in [
14,
15] for stand-alone applications. In [
12], the equivalence between the VSG and the frequency-droop algorithms are demonstrated. It is accurate for an individual unit, but when the VSG algorithm is implemented in the power systems, the damping coefficient of loads (which is typically 1-1.5) should be considered because it is much larger than that of the damper windings (such as 0.1) [
16]. However, the above studies are all restrained in the stages of the short-term frequency response. The frequency control of the conventional power systems includes a hierarchical structure because the system operation requires the ability to respond to change in demand and supply in multiple temporal stages [
17]. With higher penetration of renewable generation, the IBG units would eventually and inevitably take the responsibility of regulating the overall energy balance because of the consequent displacement of traditional SGs. Therefore, the flexibility of the power system operation requires the VSG algorithm to extend its application scope.
As the parameters of PEIs are tunable rather than restrained by physical equipment, VSG algorithms can modify the inertia properties of the renewable units in real-time. General analysis for dynamic performance can also be found in [
18,
19], in which the influence of inertia and droop properties are analyzed based on transfer functions. Continuous change and step change of virtual inertia parameters are designed to minimize frequency deviation and energy support [
20,
21,
22]. The change of inertia is straightforward but arbitrary. In [
10], the requirements for dynamic support are illustrated based on system operation, including the standards of the frequency nadir, the maximum ROCOF, and the duration of delivery. However, it lacks the discussion on how to quantitatively tune the parameters to satisfy these standards. In [
12], a step-by-step parameter design for virtual synchronous generators is conducted based on small-signal modeling, which focuses on independent decoupling and tuning of active and reactive power loops of a single grid-connected inverter. However, this approach is oriented for coping with unbalanced grid voltages, but not for quantitative performance indices. Also, the decoupling condition includes that the short-circuit ratio is no less than 10, which is typically not satisfied in power systems [
23]. In [
24], quantitative performance analysis is completed for the inertial response provided by the capacitor in the DC link. However, the capacitor can only provide frequency support as an energy buffer, and the response ability is restrained by the predesigned capacitance. Again, from the view of the operation flexibility, the quantitative performance analysis for the overall power systems should be considered for the generation mix (SGs and IBG units).
Within a microgrid, based on the information technology and communication network, secondary frequency regulation (SFR) and tertiary frequency regulation (TFR) could also be implemented on VSIs [
25,
26,
27,
28,
29]. In recent research, the VSG-based IBG can also participate in system frequency regulation when active power reserves (APRs) are implemented. Instead of the traditional maximum power point (MPP) tracking, the APR strategy controls the IBG units to operate at a sub-optimal point [
30]. Therefore, generation availability is reserved to tackle the power imbalance caused by the uncertain nature of renewables [
31]. Active power reserves by RG units can be realized by two types of control strategies: (1) the delta control, which deloads RG units by constant percentages or values, or both according to the meteorological conditions [
32]; and (2) the balance control, which controls the RG output by upper limit when the surplus power acts as reserves [
33]. The APR control strategy enables the IBG units with persistent generation availability to participate not only short-term frequency response stages (IR and PFR) but also long-term frequency regulation stages (SFR and TFR). Therefore, a complete hierarchical structure of multiple temporal frequency control stages could be emulated on the VSG-based IBG units.
In order to enhance the VSG algorithm to sustain the flexibility level of power systems containing a mixed generation at all times, in this paper, a quantitative approach of performance tuning for VSG-PEIs participating in multiple temporal stages of frequency control is presented. The contributions of this work could be summarized as follows:
(1) Besides the capabilities of IR and PFR, by referring to the knowledge of conventional generation and operation, an enhanced control strategy for the capabilities of SFR and TFR are designed to complement the VSG algorithm. Therefore, VSG-based PEIs could perform multiple temporal frequency control.
(2) The analysis of frequency response dynamics, based on the simplification of the transfer function down to the second-order form, is conducted for both the stages of (1) IR and PFR, and (2) SFR. Six performance indices are proposed, and the frequency responses influenced by different parameters are analyzed.
(3) It is noted that the performance indices are influenced by composite parameters, but the hierarchical stages of IR, PFR, and SFR operate in chronological order. Therefore, a parameter tuning algorithm is designed in which the parameters are also determined following a chronological sequence.
(4) The proposed parameter tuning approach could either be used to analyze dynamic performance and tune parameters for either the bulk system performance after the power unbalance disturbances or the dominant generation units in a stand-alone scenario.
The rest of the paper is organized as follows:
Section 2 presents the complete emulation control strategies for PEIs with multiple temporal frequency control.
Section 3 analyzes the parameter influence on the IR and PFR stages.
Section 4 analyzes the parameter influence on the SFR stage. Through analyzing the composite influence on system performances by different parameters,
Section 5 proposes a parameter tuning algorithm by consideration of the time sequence of performance indices in the multiple frequency control stages.
Section 6 verifies the proposed algorithm by simulation.
2. VSG Emulation Control Strategies for VSIs with Frequency Control
For the IBG, the external characteristics are largely determined by the supplementary controller in the control structure. In inchoate studies, among the VSG implementations in different orders, the simplest second-order model is with better stability in transients [
34] and can be combined with virtually any VSI control strategies involving a cascade structure [
35]. By the implementation of the VSG algorithm, the IBG is capable of performing IR and PFR in the same way as the SGs.
The equations of motion, describing the effect of unbalance between the mechanical torque and the electromagnetic torque on rotation, could be found in many classical textbooks (such as [
16]). The inertial response of the SGs is instantaneous without prerequisite measurements. For traditional SGs, the inertia is provided by the kinetic energy stored in the rotation equipment. The inertia constant
HSG indicates the inertia property, which can be expressed as
where
J is the moment of inertia,
is the angular speed of the rotor,
VAbase is the rated power. Similar to
HSG, the virtual inertia constant
Hvir of PEIs can be analogically expressed as the ratio of the provided energy to its rated power
where
Jvir is the virtual moment of inertia,
is the virtual angular speed. The inertial response follows Newton’s law of motion which can be expressed as the swing equation,
where
D is the damping coefficient of frequency sensitive load,
Pm and
Pe are the virtual mechanical and electrical power (when the initial status is assumed as 0, and the second-order terms are neglected),
is virtual angular speed. When the swing equation is represented by inertia constant, all the parameters are per-unit values.
The PFR of SGs is provided by the turbine-governor system [
16]. In per unit value, for a typical SG with a reheat steam turbine, the droop property is
where
R is the speed droop,
Y is the valve position,
TG is the time constant of speed governor, and
FHP,
TRH,
TCH are typical parameters for a reheat steam turbine. The emulation for the properties of turbine-speed governor systems of SGs is necessary when the VSG-based PEIs are operated in parallel with traditional power plants.
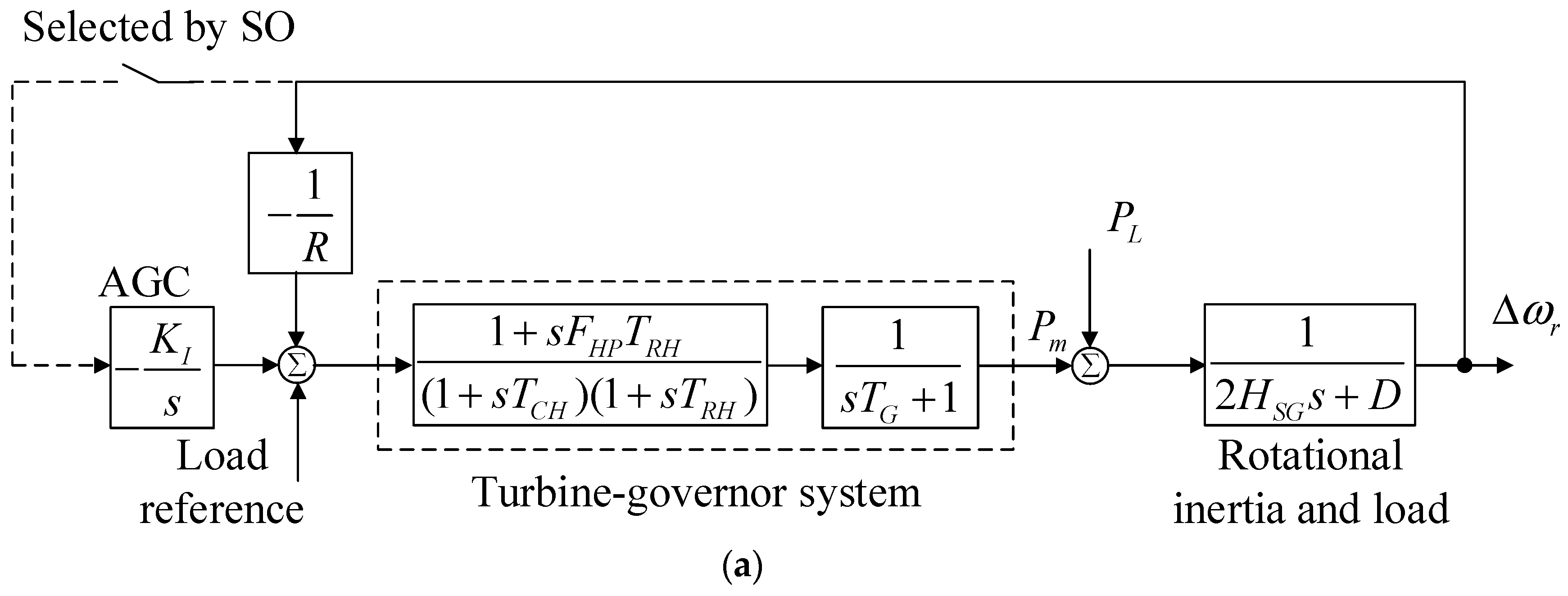
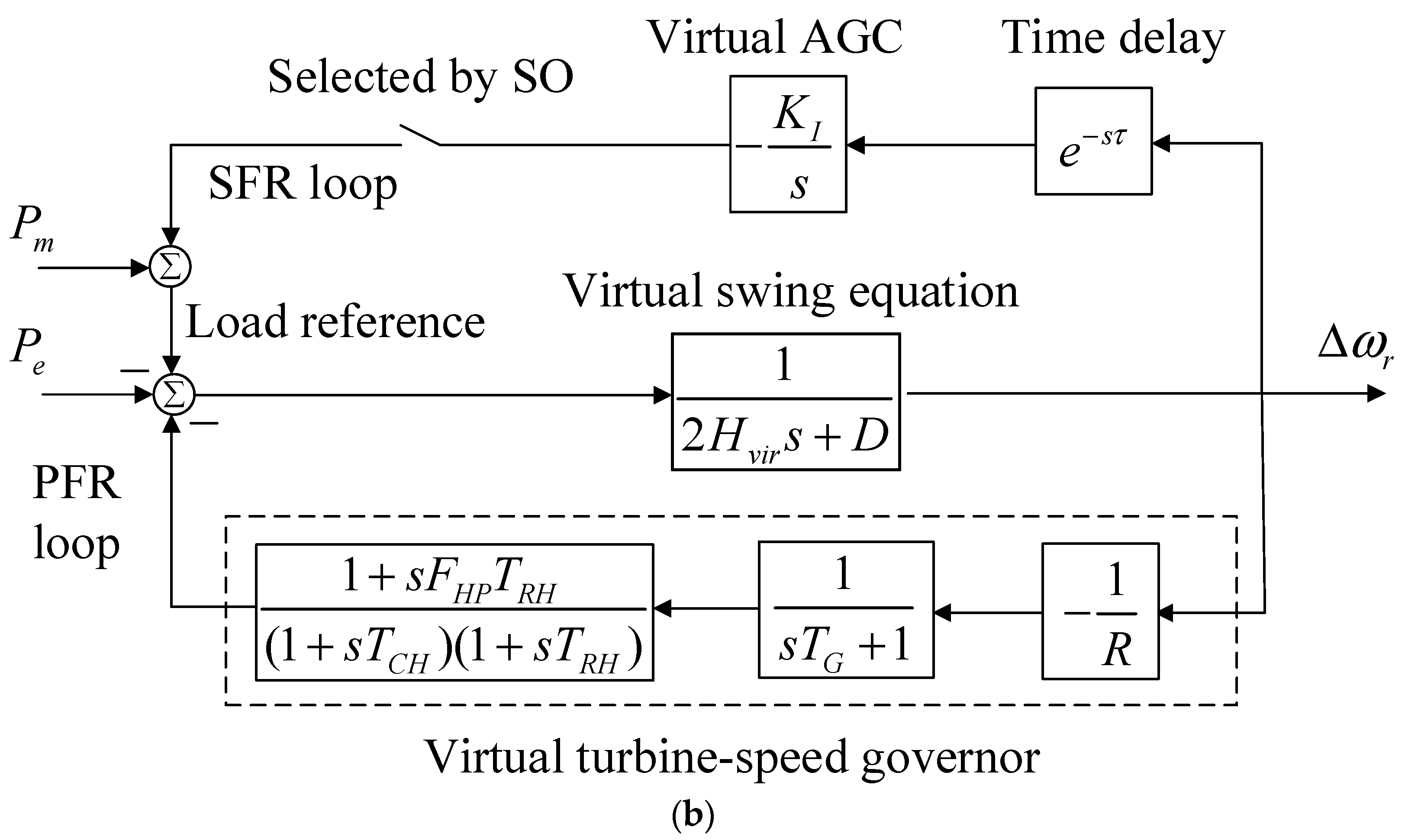
By the exploitation of conventional theories of the SG-based power system, the VSG algorithm also enables the PEIs to perform SFR and TFR. The SFR kicks in when the frequency deviation lasts for a preset time period after the frequency is stabilized by the IR and PFR. The TFR is activated by the system operator (SO) to set the load reference for each generation unit. For traditional SGs, the SFR and TFR are executed by the regulation of load reference settings, which is shown in
Figure 1a. The variables of load references also pass through the blocks of the turbine-governor system. However, because only specific units in the power system are selected to perform automatic generation control (AGC) regulation, when the emulation of AGC is implemented on VSG-PEIs, the load reference can be directly fed into the block of the virtual swing equation, as shown in
Figure 1b. In
Figure 1b,
is the time delay of SFR,
KI is the coefficients of the integral controller.
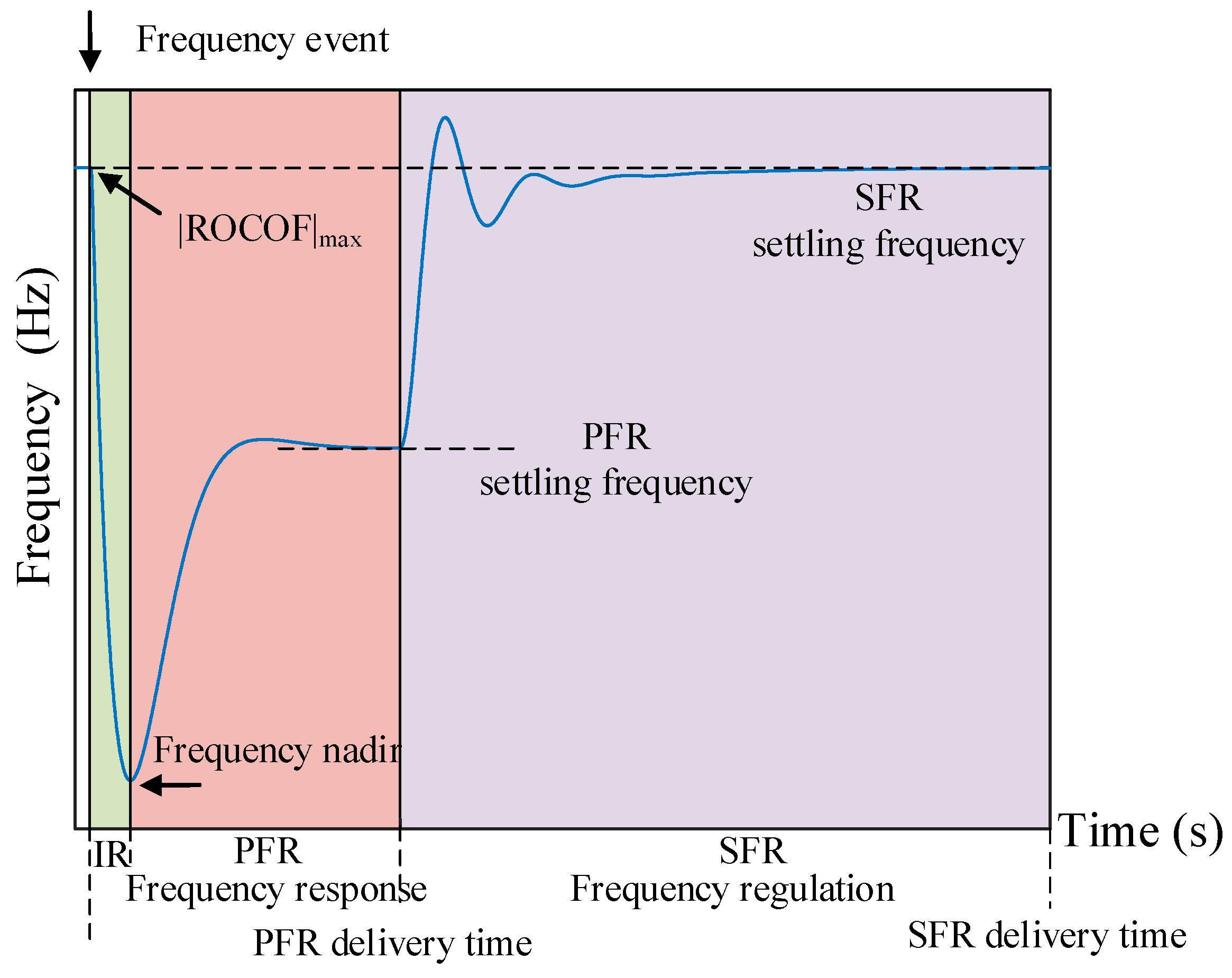
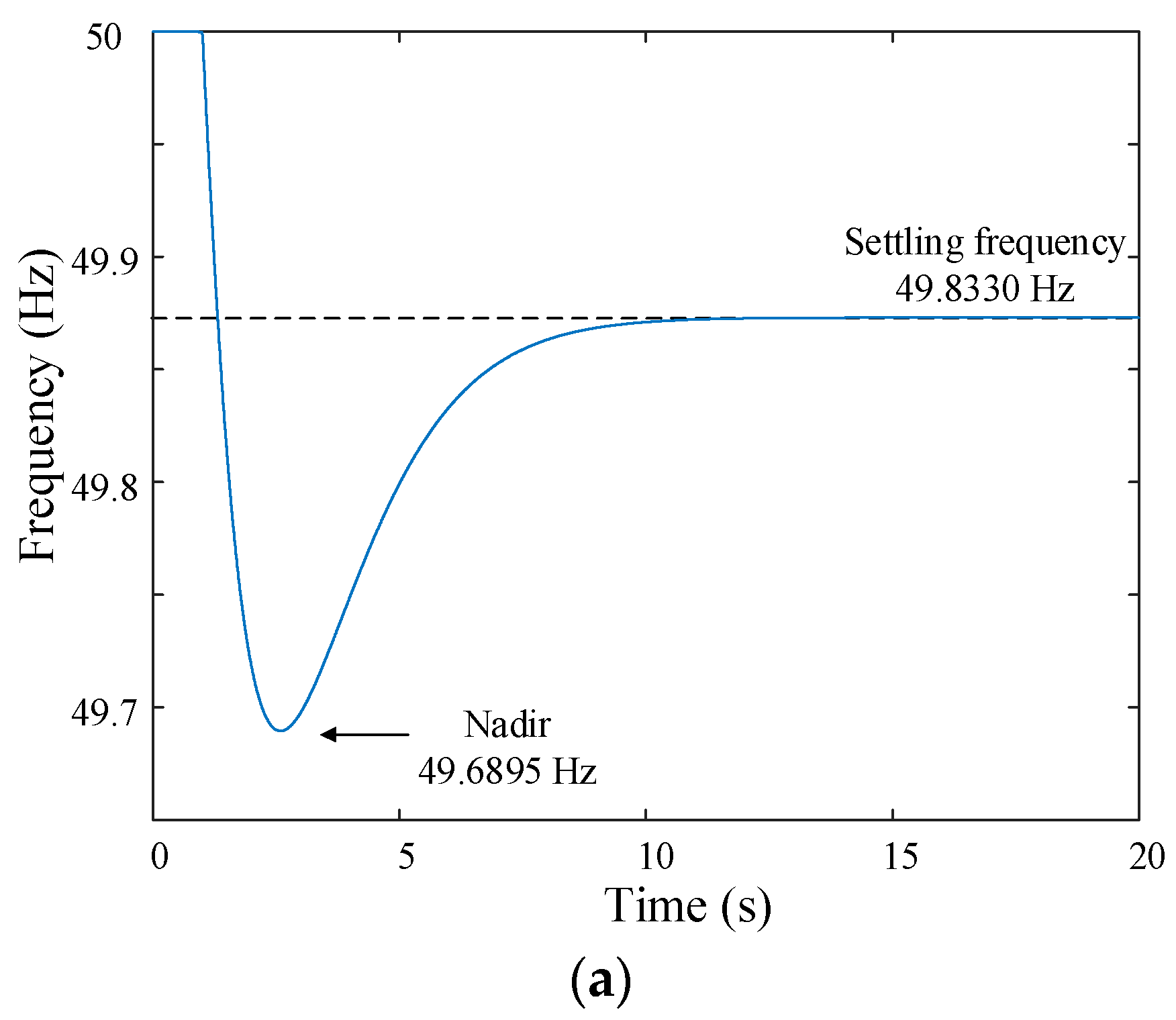
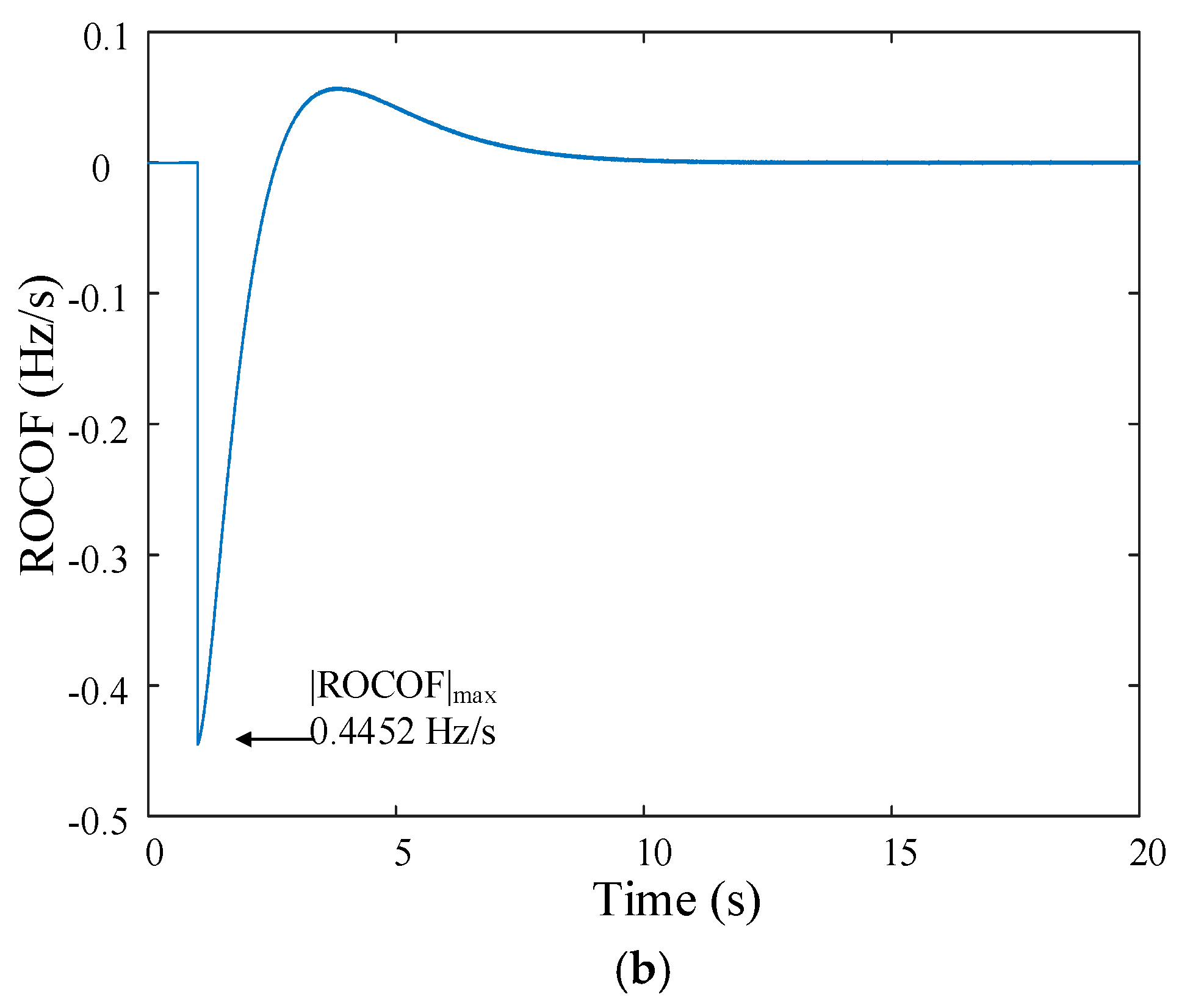
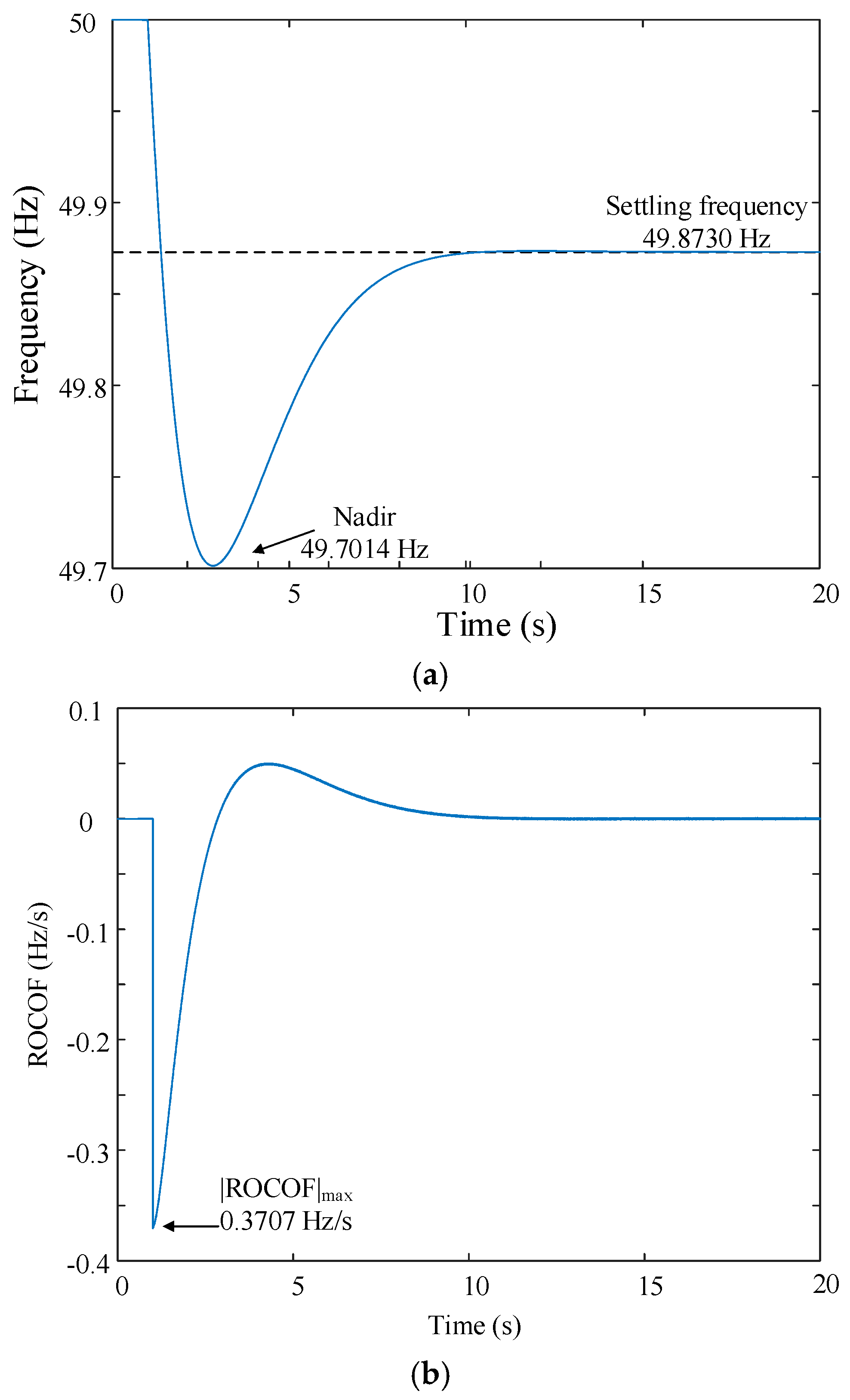
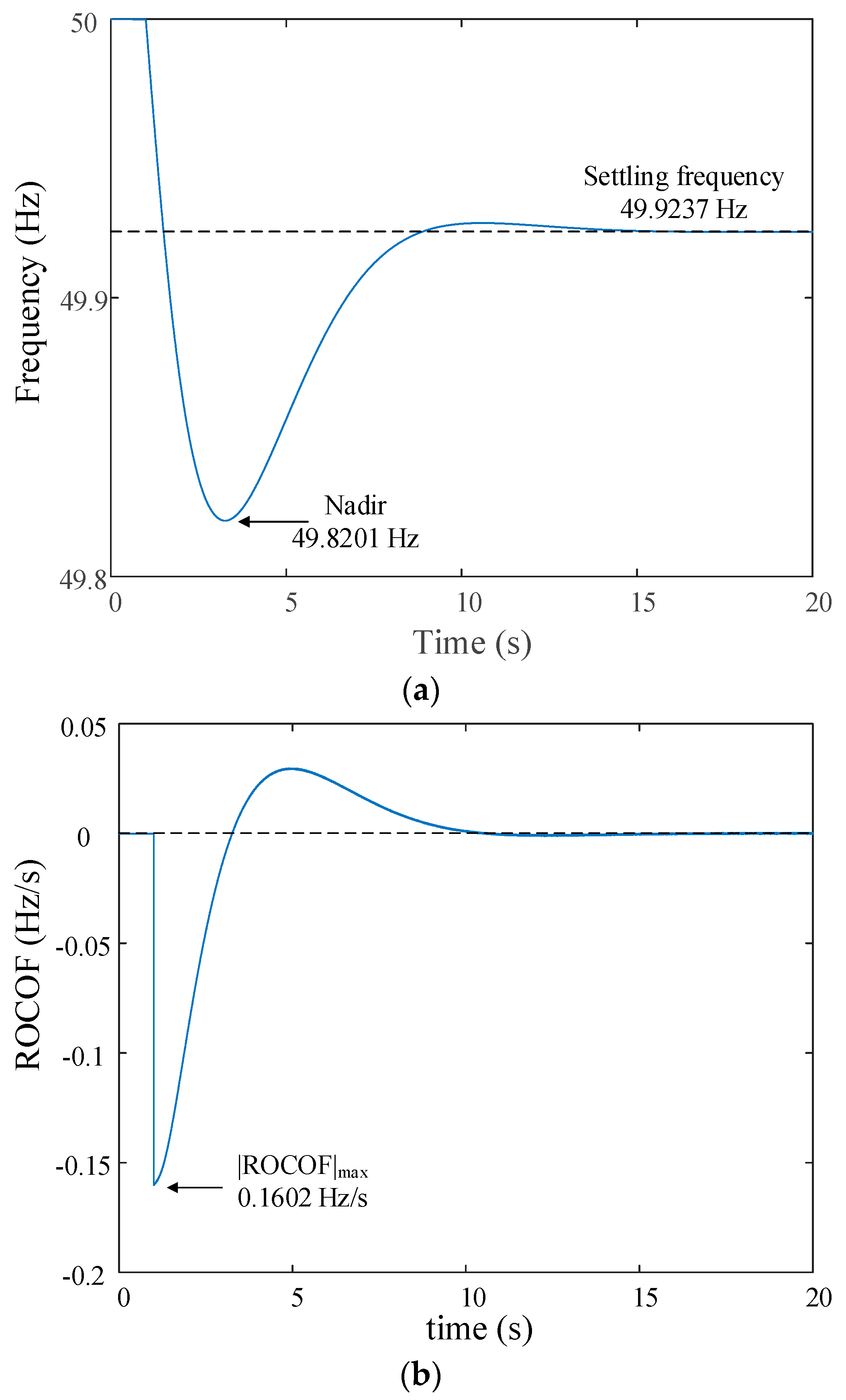
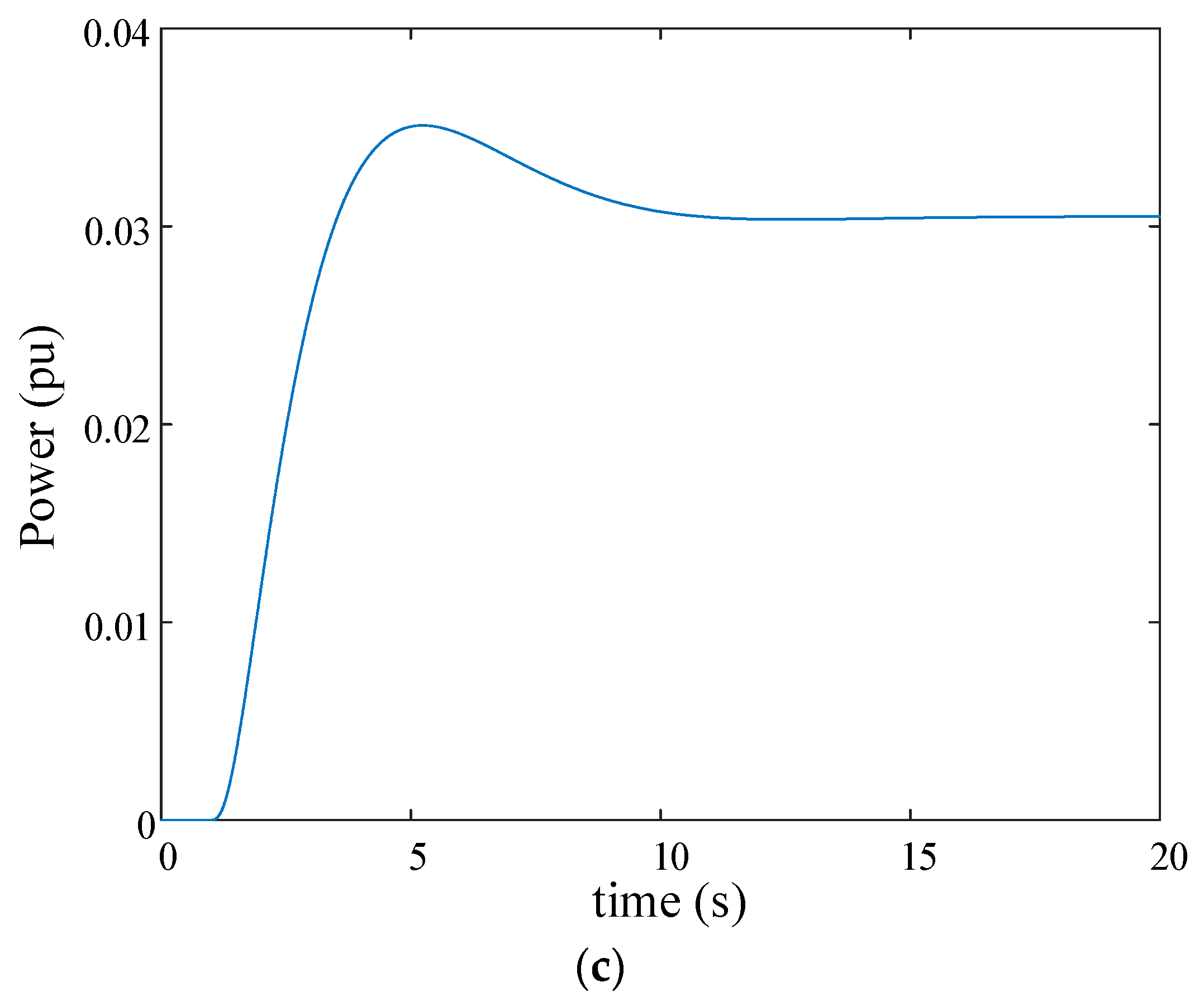
The system frequency indicates the overall power balance between the generation and the demand at any instantaneous time. In the traditional SG-dominated power system, active power-frequency control is a series of multiple temporal processes that can be divided into four stages [
16]. As the VSG algorithm can fully emulate the frequency control performance of the SGs, the multiple temporal frequency control is also provided by the VSG-PEIs. For quantitative analysis, the performance indices mainly include the maximum ROCOF, the frequency nadir, the settling frequency, and the settling time, which are shown in
Figure 2.
Furthermore, in a small synchronous area, the equivalent inertia constant
of different VSG-based PEIs and SGs can be expressed as
where
n is the total number of generation units with inertia properties,
and
are the inertia constant and power rating of the
i-th unit, respectively,
is the power base of the system [
32,
36]. Also, the equivalent speed droop
can be expressed as
where
is the speed droop property of the
i-th generation unit [
16].
Consequently, for a local synchronous system, the generation units can be simplified and equivalent to a single unit. The emulation strategy mentioned before could be considered as the overall characteristics of the entire local synchronous area. Then once the parameters are tuned, it could either be used to control the dominated PEI in a stand-alone system or calculate the parameters reversely for individual units with inertia properties.
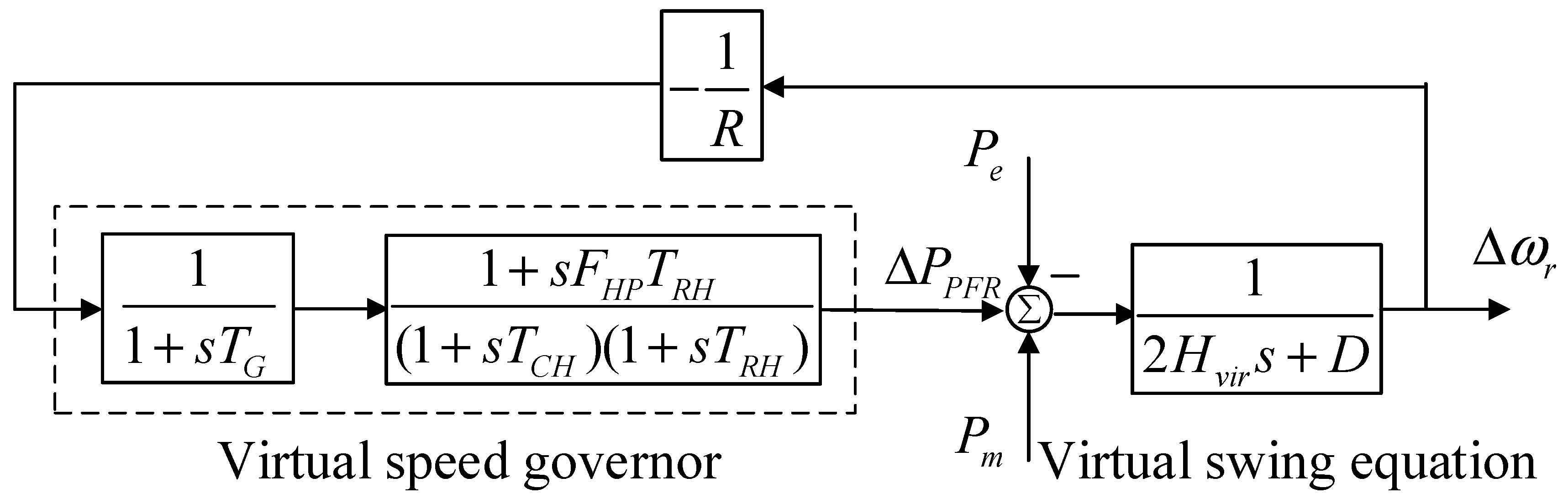
3. Simplification of the Dynamic System in IR and PFR Stages
The emulation of IR and PFR is derived from the mechanism imitation of the swing equation and the turbine-speed governor system. The effect of the closed-loop transfer function of the VSI based on the cascade control structure is assumed to be fast and accurate. Then the high-order system involving virtual IR and PFR can be simplified into a second-order dynamic system by the dominant poles and zeros without too much error. The performance indices can be deduced from the simplified transfer function. Take a stand-alone VSG-PEI supplying isolated load for example, the block diagram involving IR and PFR is shown in
Figure 3.
For a step change of demand
, the transfer function from
to the virtual angular speed of rotor
is
For SGs with reheat steam turbines, typical parameters are shown in
Table 1.
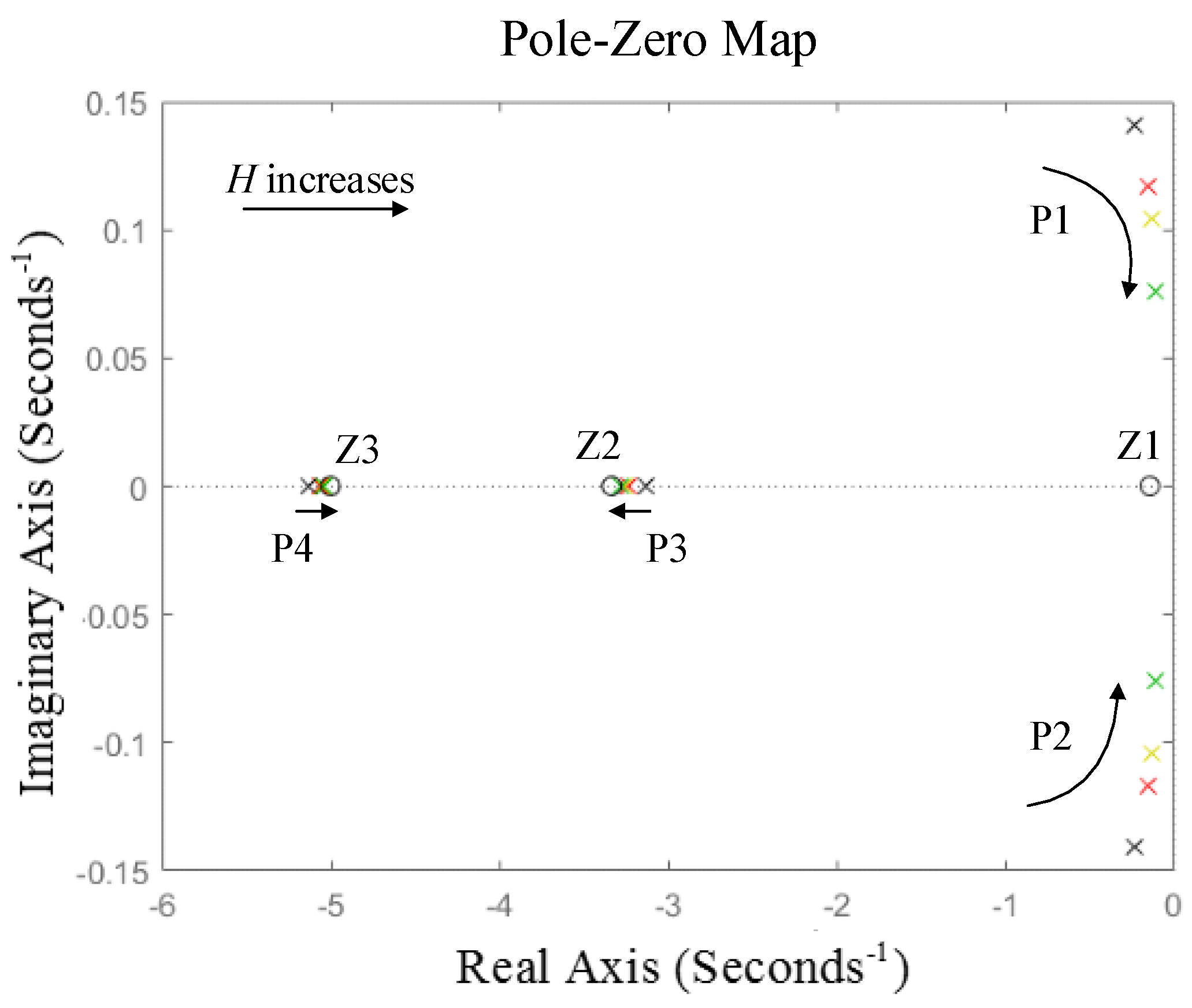
The pole-zero map of the transfer function is shown in
Figure 4. From the transfer function
G(
s), the zeros are fixed on the real axis. With the increasing of
H, the poles P3 and P4 tend to approach the zeros Z2 and Z3. As P3 and P4 are fast poles and very close to Z2 and Z3, the dynamic responses are mainly determined by the dominant zeros Z1 and the slow poles P1 and P2 [
37]. It is noted that the inertia constants of different SGs, which are shown in
Table 2, are in a small range rather than accurately the same [
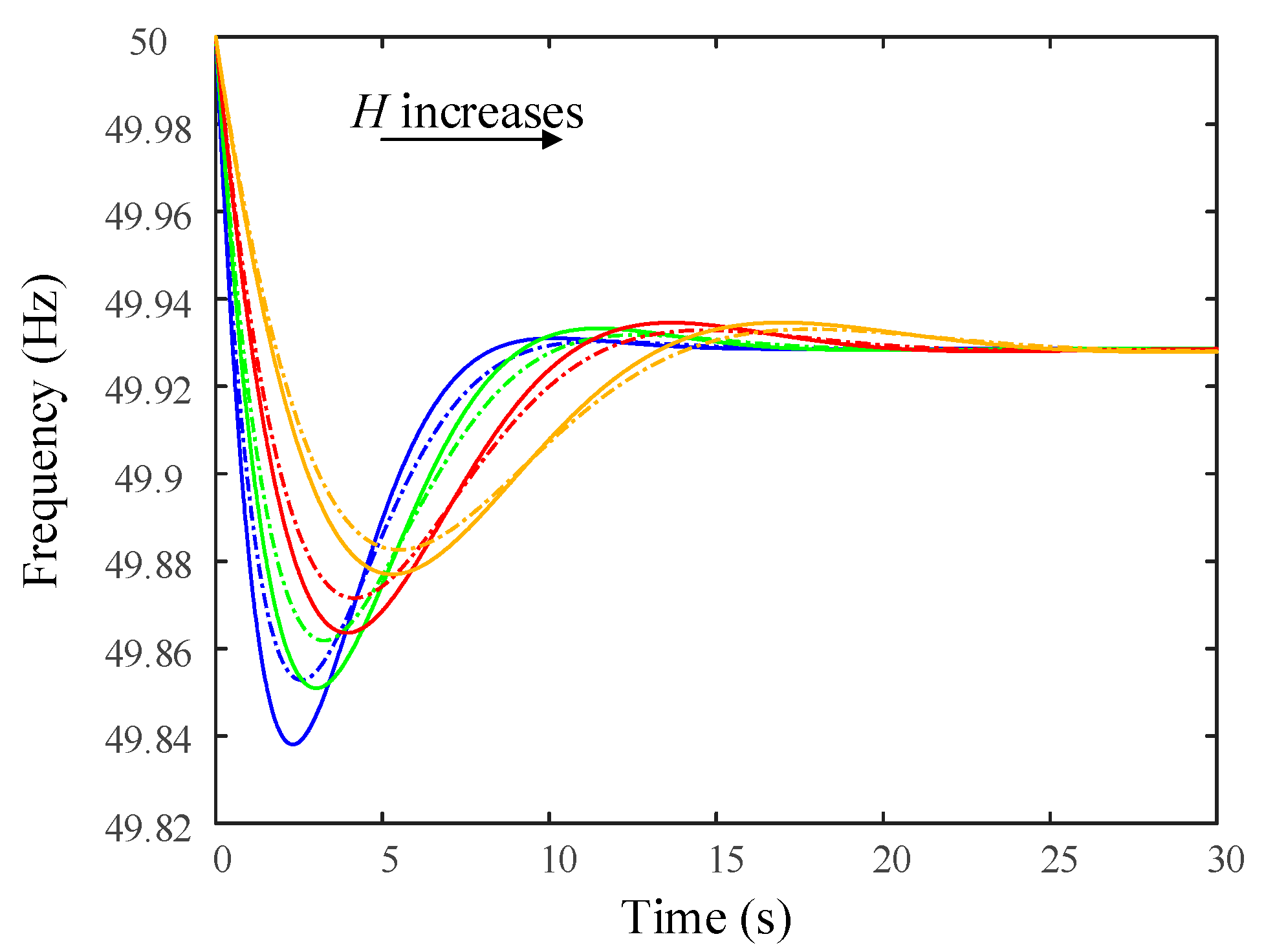
16]. The concept of VSG is to enable the PEIs to provide approximately synchronous responses like traditional SGs. Moreover, fast poles influence the early part of the time history [
37]. The frequency responses based on the transfer function of the original and simplified systems are shown in
Figure 5, which shows the maximum error between the two dynamic systems is less than 10% frequency deviation. Therefore, the estimation by the dominant zeros and poles are practically acceptable.
According to the dominant zeros and poles (Z1, P1, and P2), the simplified transfer function of the dynamic system is derived from Equation (7), which can be expressed as
where
and
are the undamped natural frequency and damping ratio [
37],
When the system is subjected to a step increase in demand
By multiplying (8) and (10) and taking the inverse Laplace transformation, the dynamic response of frequency deviation in time-domain can be expressed as
where
Assuming the original state of the frequency is 1.0 pu, the frequency response is
From Equation (11), performance indices during IR and PFR can be derived. First, the rate of change of frequency (ROCOF) is
It is noted that, when
t = 0, ROCOF reaches maximum magnitude, which can be expressed as
From Equation (11), when
ROCOF = 0, the peak time
(the time when the frequency reaches a nadir or a peak) can be expressed as
Substitute (16) to (13), then the peak frequency
fpeak (or nadir) is
When the third item in the Equation (17) decays approximately to zero, the quasi-steady-state frequency
fss is achieved, which can be expressed as
The frequency deviation can also be evaluated by the frequency overshoot
, which can be expressed as
The settling time
ts can be defined as the dynamic response enters the 2% quasi-steady-state error band [
17],
and by submitting Equations (11) and (12) into Equation (20), the settling time can be deduced as
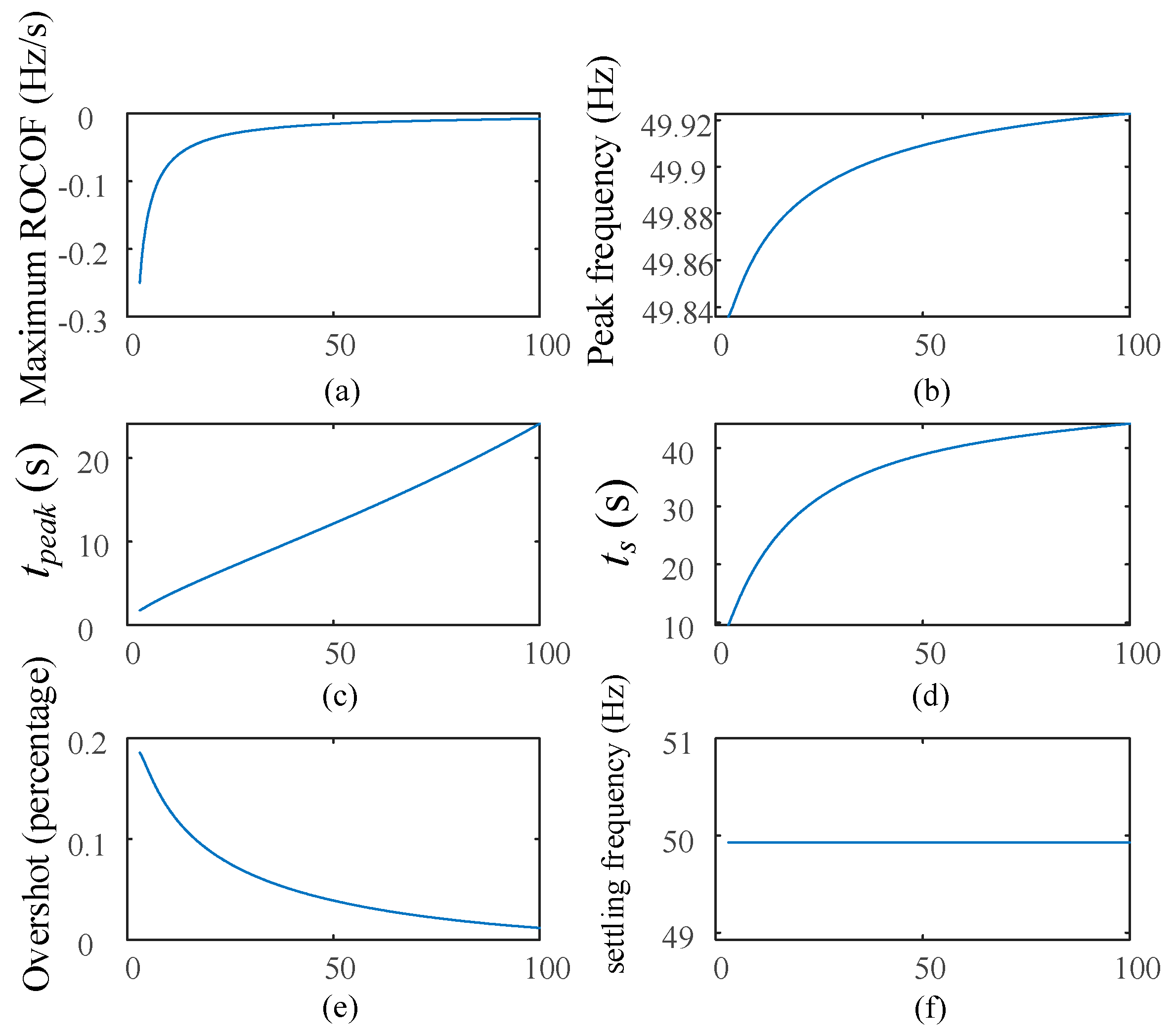
From the performance indices, the effect of separate parameters on system performance can be derived. When subjected to a step increase of load by 0.03 pu, the trends of the above performance indices corresponding to different
H and
R are shown in
Figure 6 and
Figure 7. In
Figure 6,
R is set as a constant, and in
Figure 7,
H is set as a constant.
From
Figure 6a,b,e, the increasing of inertia constant
H leads to the decreasing of the magnitude of ROCOF, frequency nadir, and the overshoot. Therefore, it proves that inertia property could suppress the ROCOF and improve frequency nadir. From (c), the increasing of
H also delays the peak time. However, the increasing
H would slow down the dynamic responses, which is shown in (d). Therefore, there is a trade-off between the nadir improvement and the delivery time. From (f), the settling frequency is irrelative to
H.
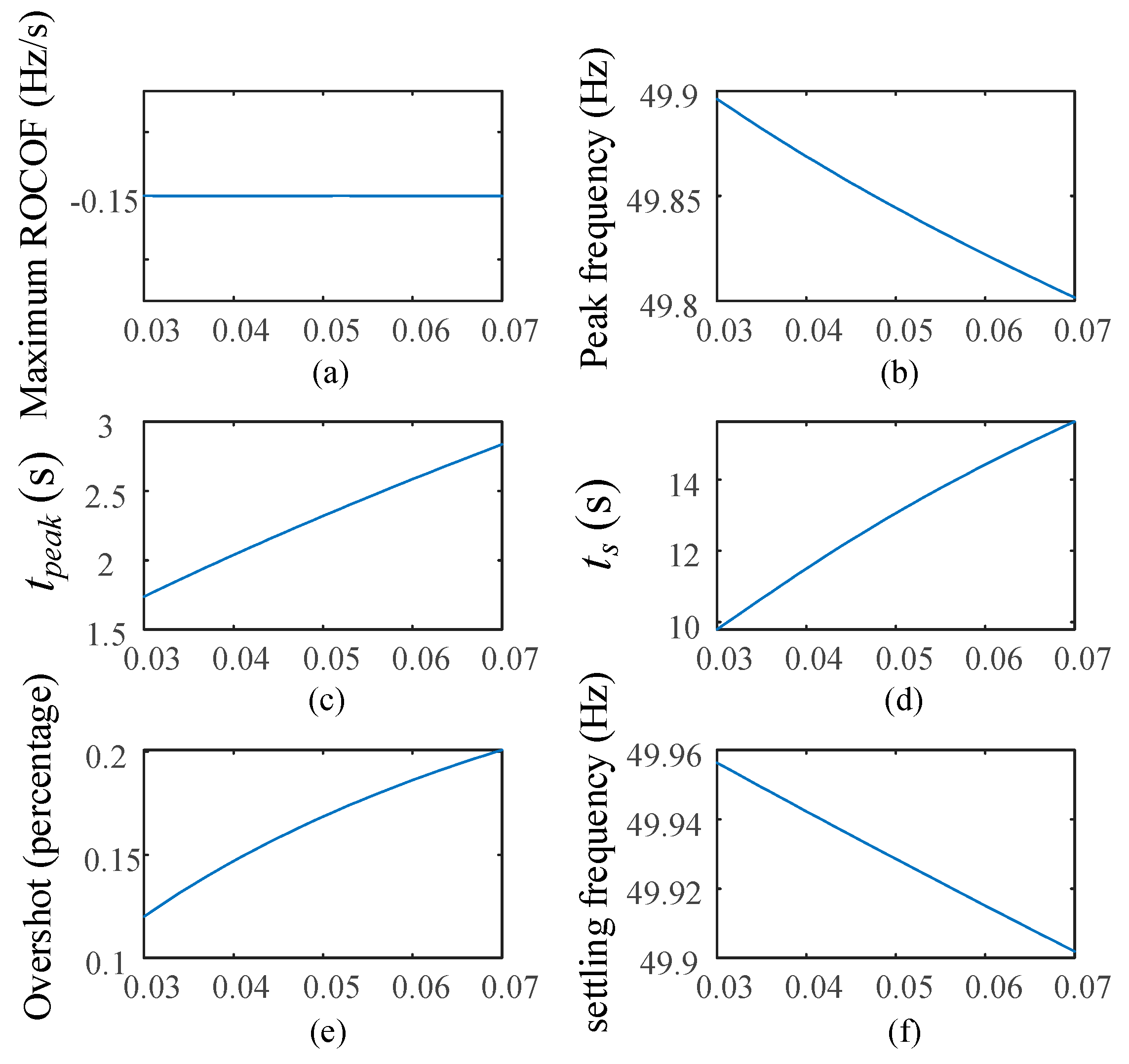
From
Figure 7a, percentage
R does not influence the ROCOF. From (b) and (e), the nadir gets worse, and the overshoot increases as the percentage
R increases. From (c) and (d), the changes in percentage
R do not alter the peak time and settling time very much. From (f), the increase of
R would decrease the settling frequency. Consequently, the speed droop coefficient
R indicates the proportional relationship between the amount of support power and the counteracted frequency deviation. The lower
R represents a larger amount of active power supported, which results in a better nadir.
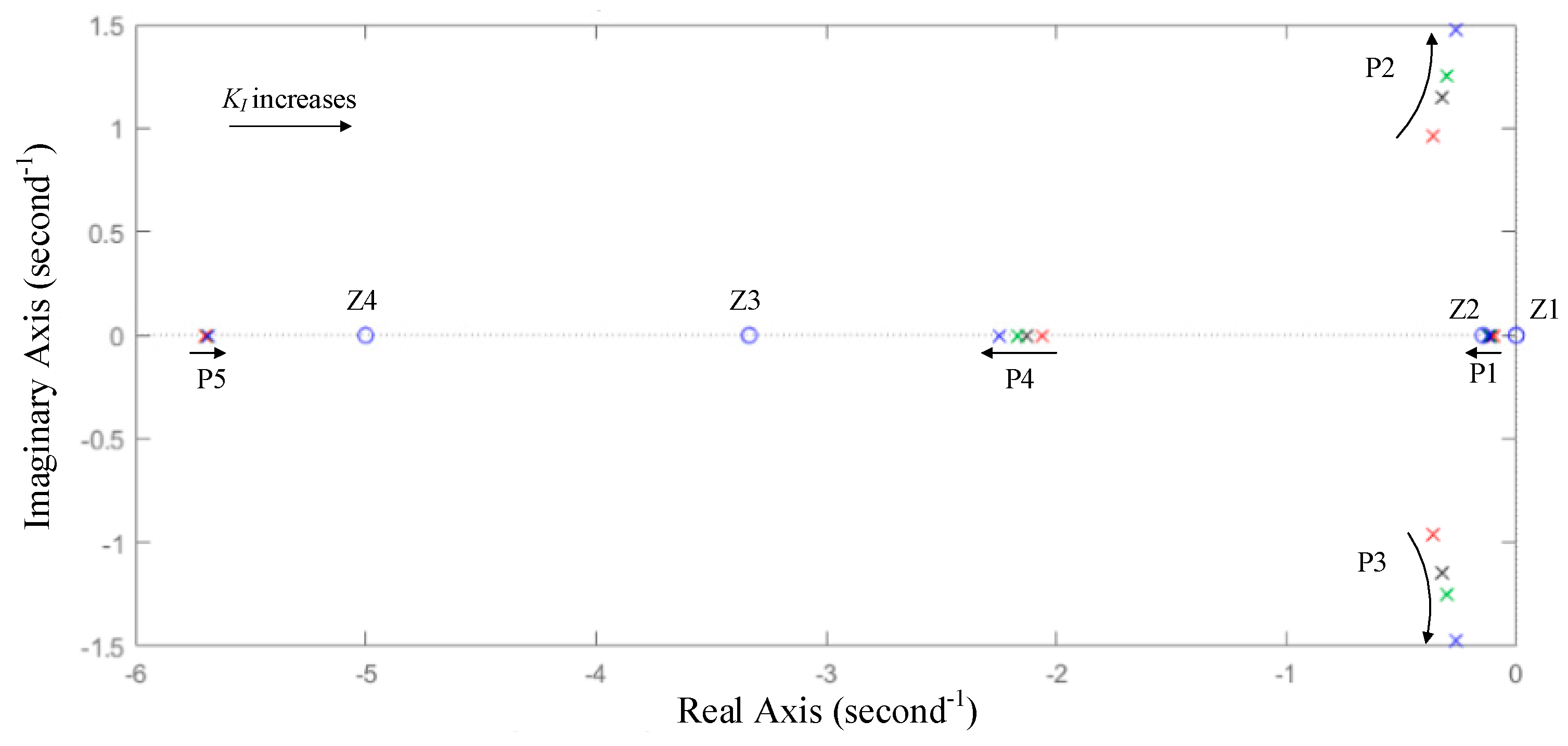
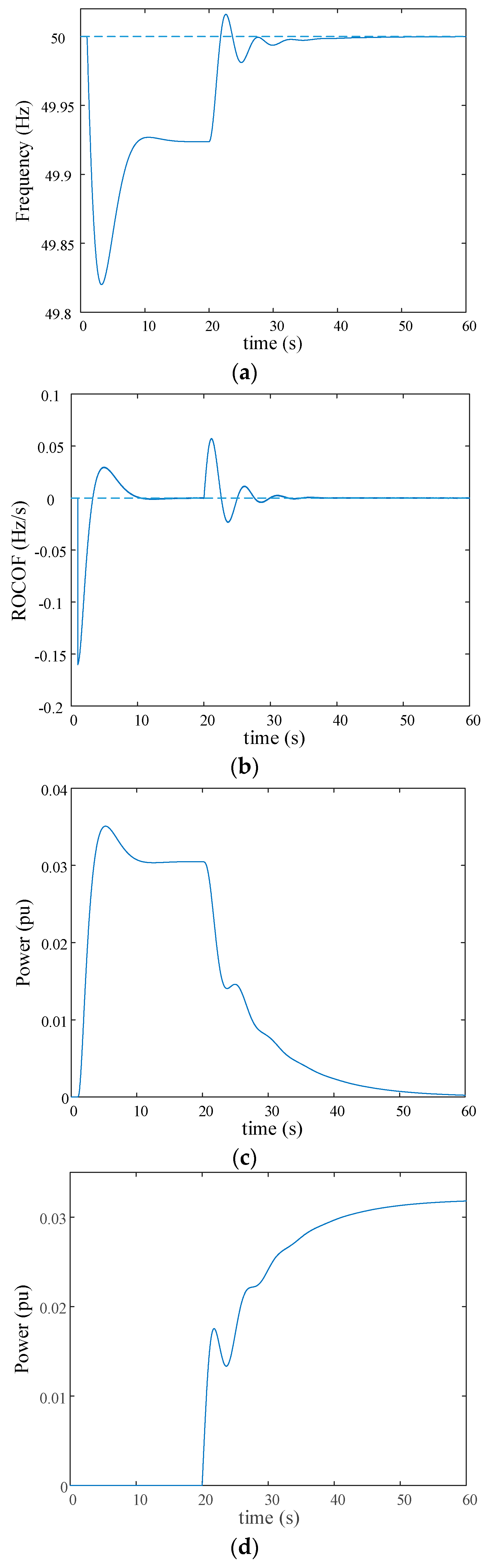
4. Simplification of the Dynamic System in SFR Stages
The secondary control regulates the reference generation output and restores the system frequency to the nominal. The SFR is activated after the PFR has stabilized the system frequency. In VSG-PEI, the virtual SFR is executed by adding an integrator, shown in
Figure 1b. After the frequency is stabilized, when the SFR kicks in, the transfer function of the dynamic system in the new stage is
The pole-zero map of the transfer function is shown in
Figure 8.
From the pole-zero map, the zeros are fixed on the real axis. With the increasing of KI, P1 tends to approach to Z2, which results in the mutual cancelation of effects. The effect of poles P4 and P5, and the zeros Z3 and Z4, which are far away from the imaginary axis, would be neglected for simplifications. Therefore, the poles P2 and P3, and the zero Z1 are dominant in the dynamic processes.
From the slow zeros and poles (Z1, P1, and P2), the system transfer function (Equation (22)) is simplified into the second-order, which can be expressed as
where
and
are the undamped natural frequency and damping ratio,
It is noted that the initial status in the dynamic system is inherited from the IR and PFR stages. By taking the inverse Laplace transformation, the dynamic response of system frequency in time-domain is derived, which can be expressed as
where
From Equation (25), system performance indices during SFR can be derived. First, the rate of change of frequency (ROCOF) can be expressed as
In Equation (27), when
t = 0, ROCOF reaches the maximum value, which can be expressed as
The peak time
is achieved when
ROCOF = 0, then from Equation (27), the peak time can be expressed as
By substituting (29) into (25), the peak frequency
fpeak can be expressed as
From Equation (25), the quasi-steady-state frequency
fss is
For floating control, the frequency deviation can be evaluated by the frequency overshoot
, which can be derived as
The settling time
ts can be defined when the decaying exponential
reaches 1% [
37].
then from Equation (33), the settling time can be derived as
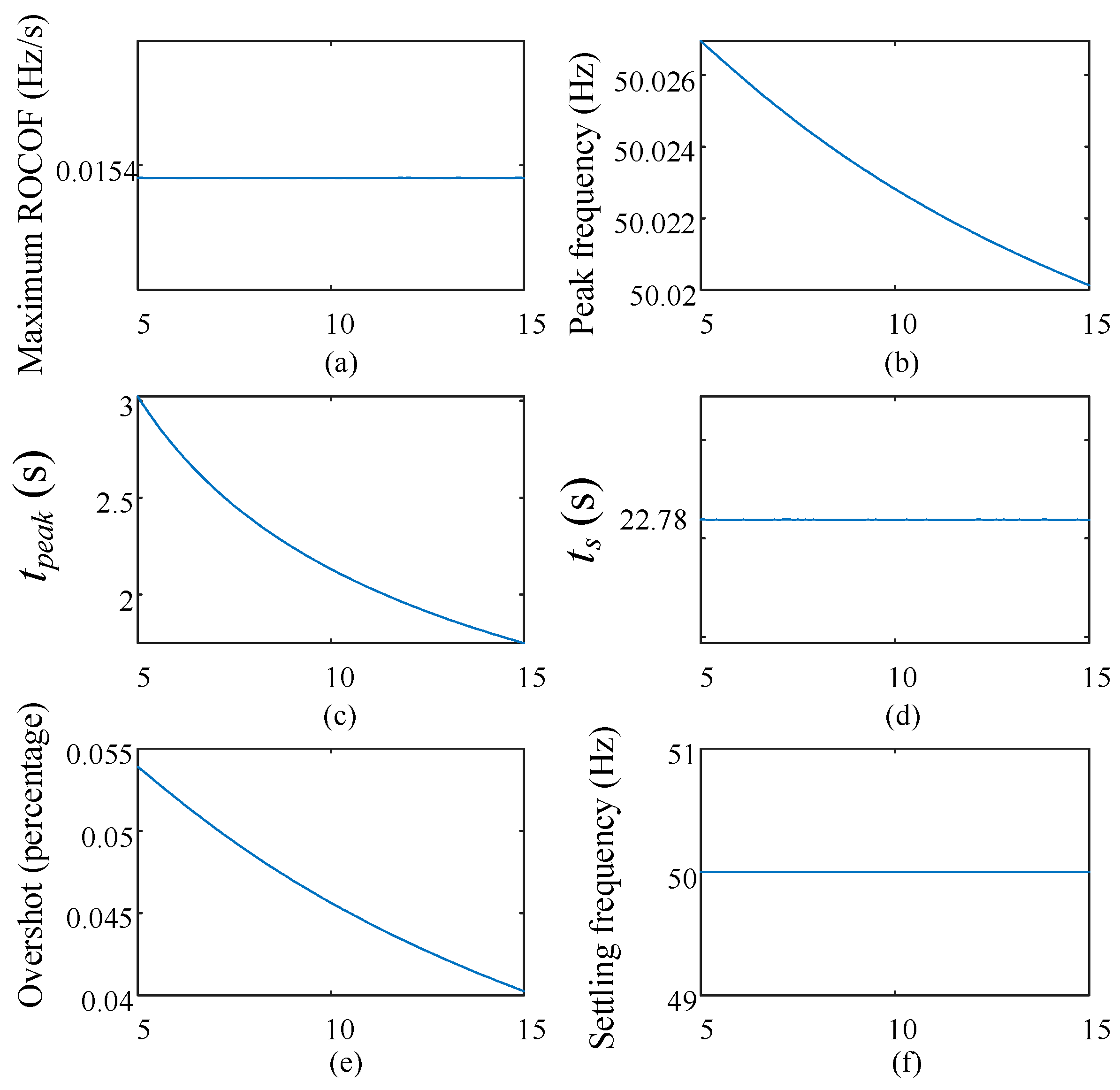
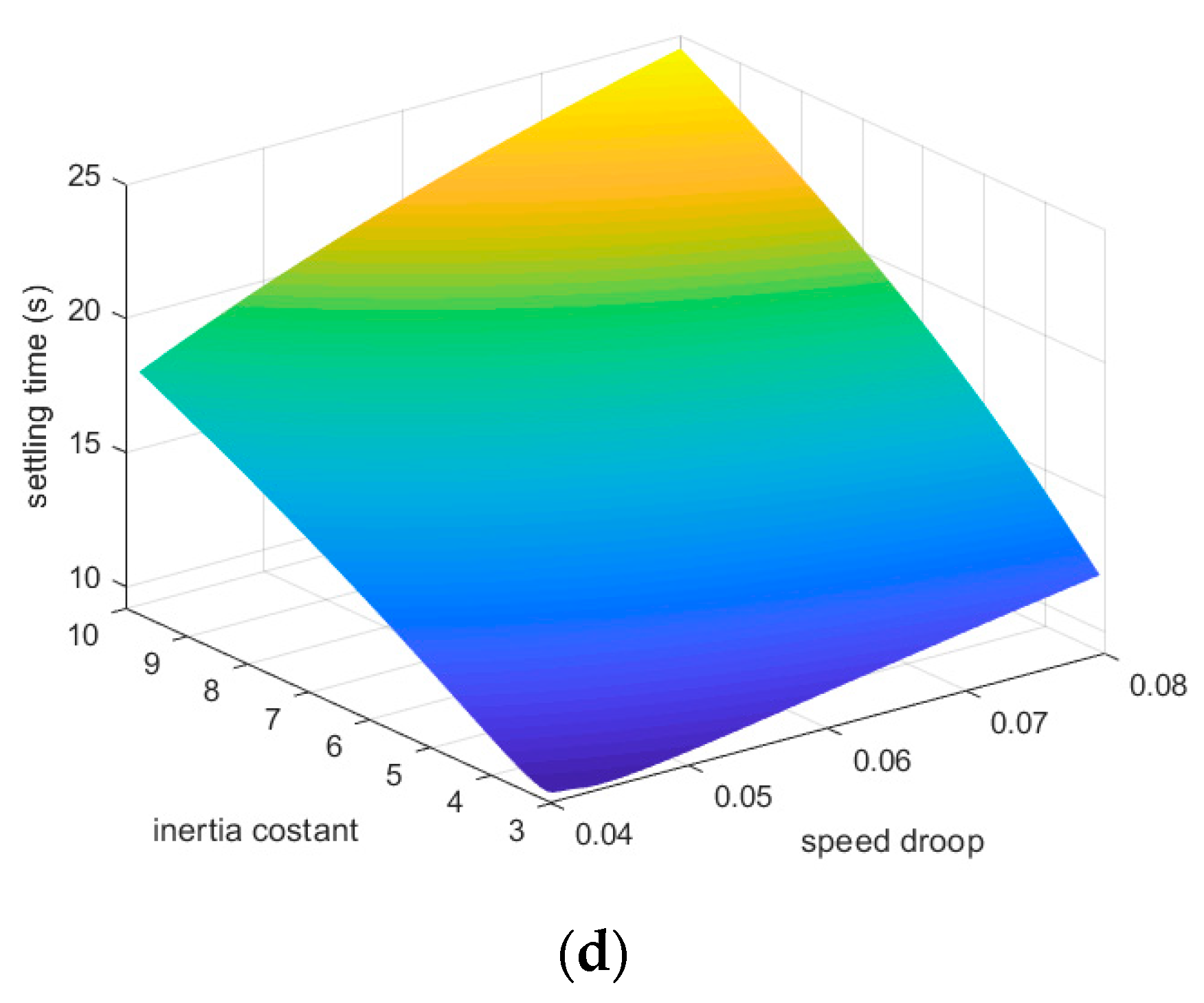
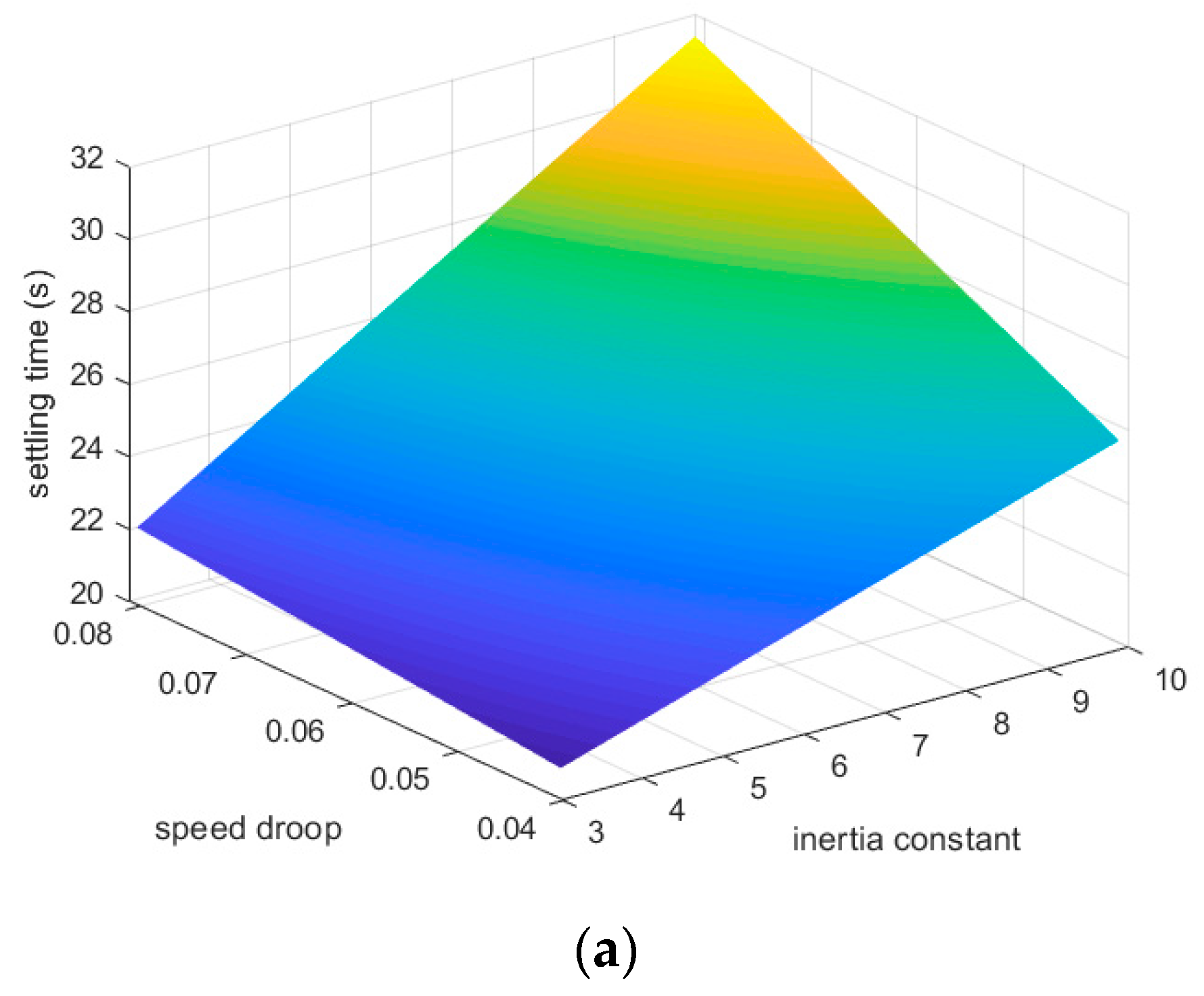
From the performance indices, the effect of separate parameters on system performance in the SFR stage can be derived. When SFR kicks in, the trends of the above performance indices corresponding to different
KI,
H, and
R are shown in
Figure 9,
Figure 10, and
Figure 11, respectively.
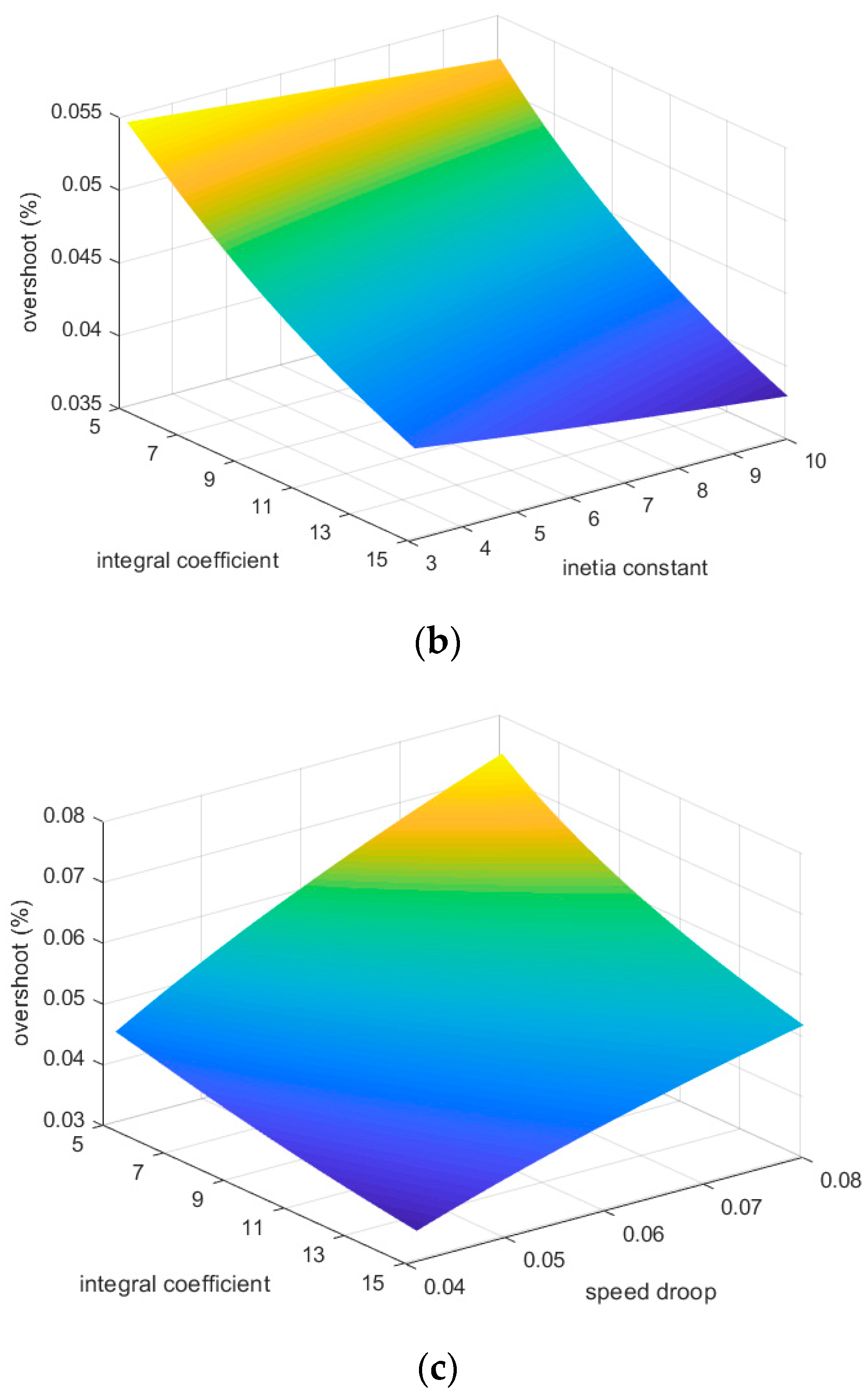
From
Figure 9a,d,f, the coefficient of the integrator is irrelative to the magnitude of the ROCOF, the settling time, and the settling frequency. From (b), (c), (e), the increase of the integral effect would decrease the peak frequency, the peak time, and the overshoot.
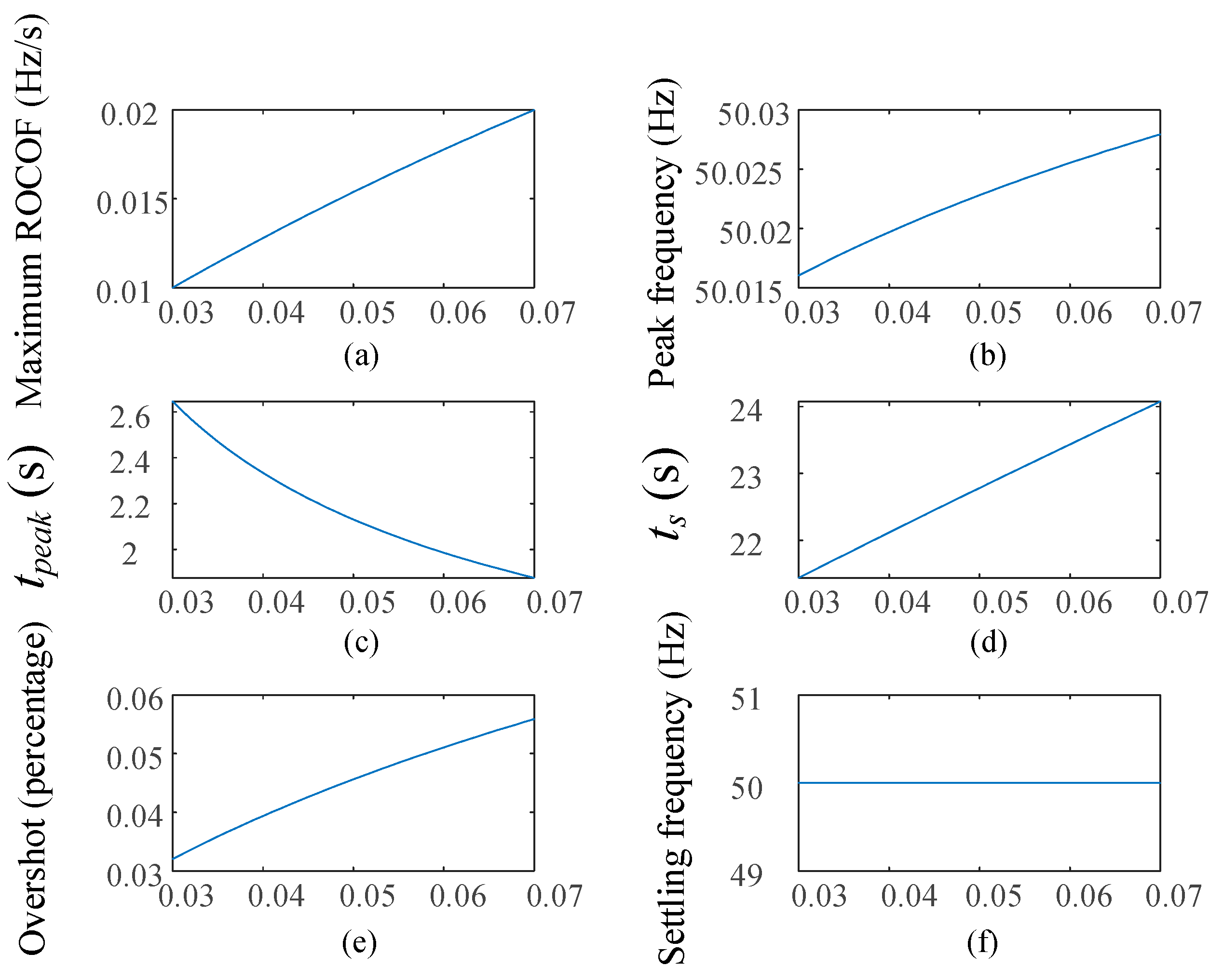
From
Figure 10a,b,e, the increasing of inertia constant would decrease the magnitude of the ROCOF, the peak frequency, and the overshoot. However, from (c) and (d), the increase of inertia property would also increase the peak time and the settling time. From (f), the inertia constant is irrelative to the settling frequency.
From
Figure 11a,b,d,e, the increase of speed droop
R would also increase the magnitude of ROCOF, the peak frequency, the settling time and the overshoot. However, from (c), the increase in speed droop would decrease the peak time. From (f), the speed droop is irrelative to the settling frequency.
7. Conclusion
Based on the quantitative analysis of performance indices, this paper proposes a parameter tuning method for VSG-PEIs performing frequency control. From the above analysis, the following conclusions are made:
(1) From the perspective of the time scale and the activation, the frequency control is divided into two parts: the frequency response including IR and PFR, and the frequency regulation including SFR. Two dynamic systems are formed in different parts.
(2) By the effects of the dominant poles and zeros, the dynamic systems of the VSG-based PEIs in both parts are simplified into approximation models with second-order transfer functions. The performance indices are deduced from the reduced-order models.
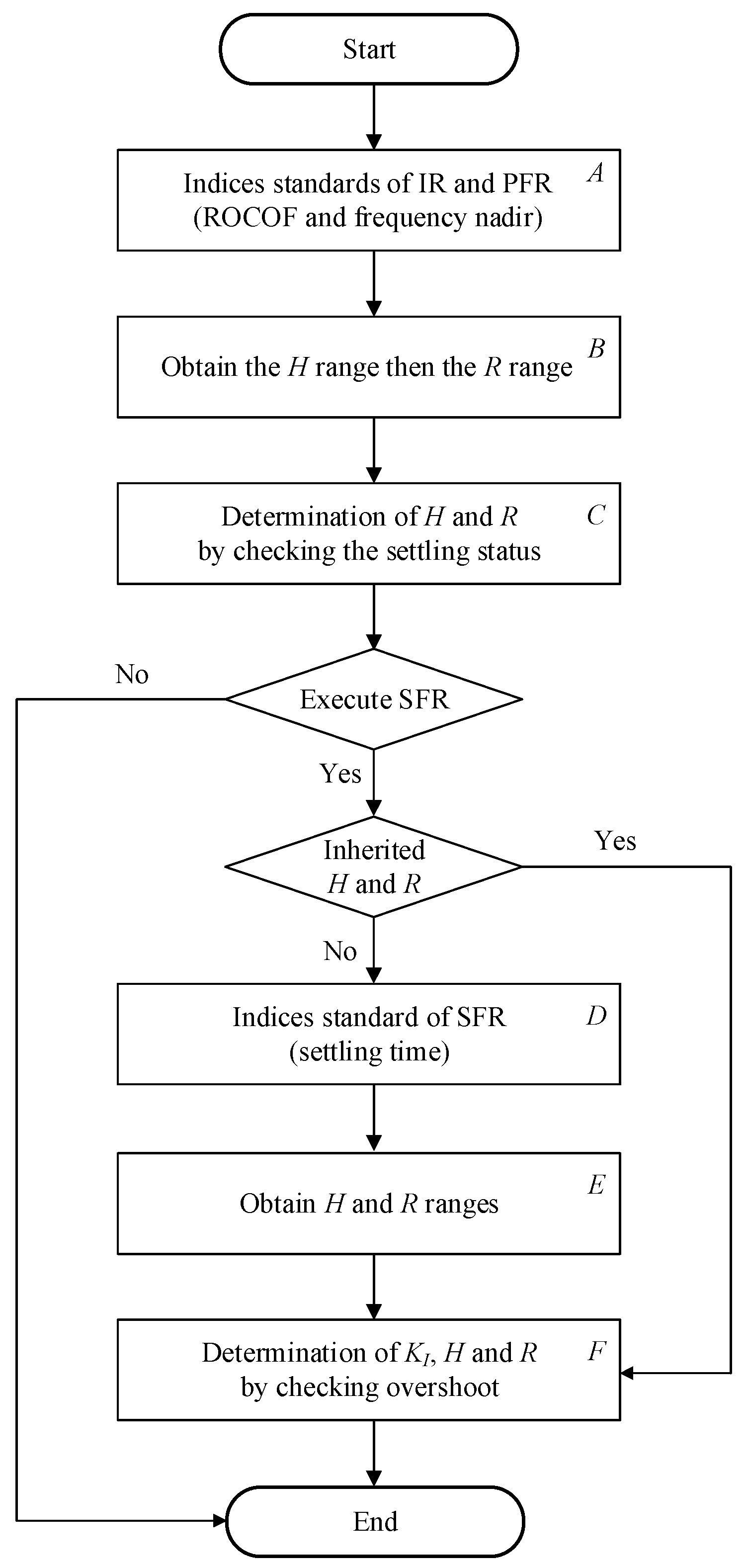
(3) Different stages of frequency control kick in chronological order. In the proposed algorithm, the inertia constant is considered first for the ROCOF standard in the inertial response stage. Then the inertia constant and the speed droop are designed by checking the requirements of the nadir, the settling time, and settling frequency.
(4) In frequency regulation, the parameter of inertia and speed droop are inherited or readjusted from the previous part. The integral coefficient is determined according to the standard of SFR delivery time.
(5) The proposed algorithm can be utilized in two scenarios: (1) the parameter determination for the dominated PEIs in a stand-alone system, and (2) the equivalent parameter determination for a synchronous area with different units with inertia properties.
By the simulation results, the proposed method can fully satisfy typical performance standards.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}