Supervised Learning of Natural-Terrain Traversability with Synthetic 3D Laser Scans


Abstract
:1. Introduction
- Synthetic 3D point clouds from Gazebo, that were previously labelled without errors [15], are employed for training and validation.
- The performance of seven potent supervised learning techniques from the free software Scikit-learn library [24] of the Python programming language is evaluated.
- The resulting classifiers are also tested with real data acquired, whereas Andabata was teleoperated on natural terrain.
2. Traversability-Labeling of 3D laser scans
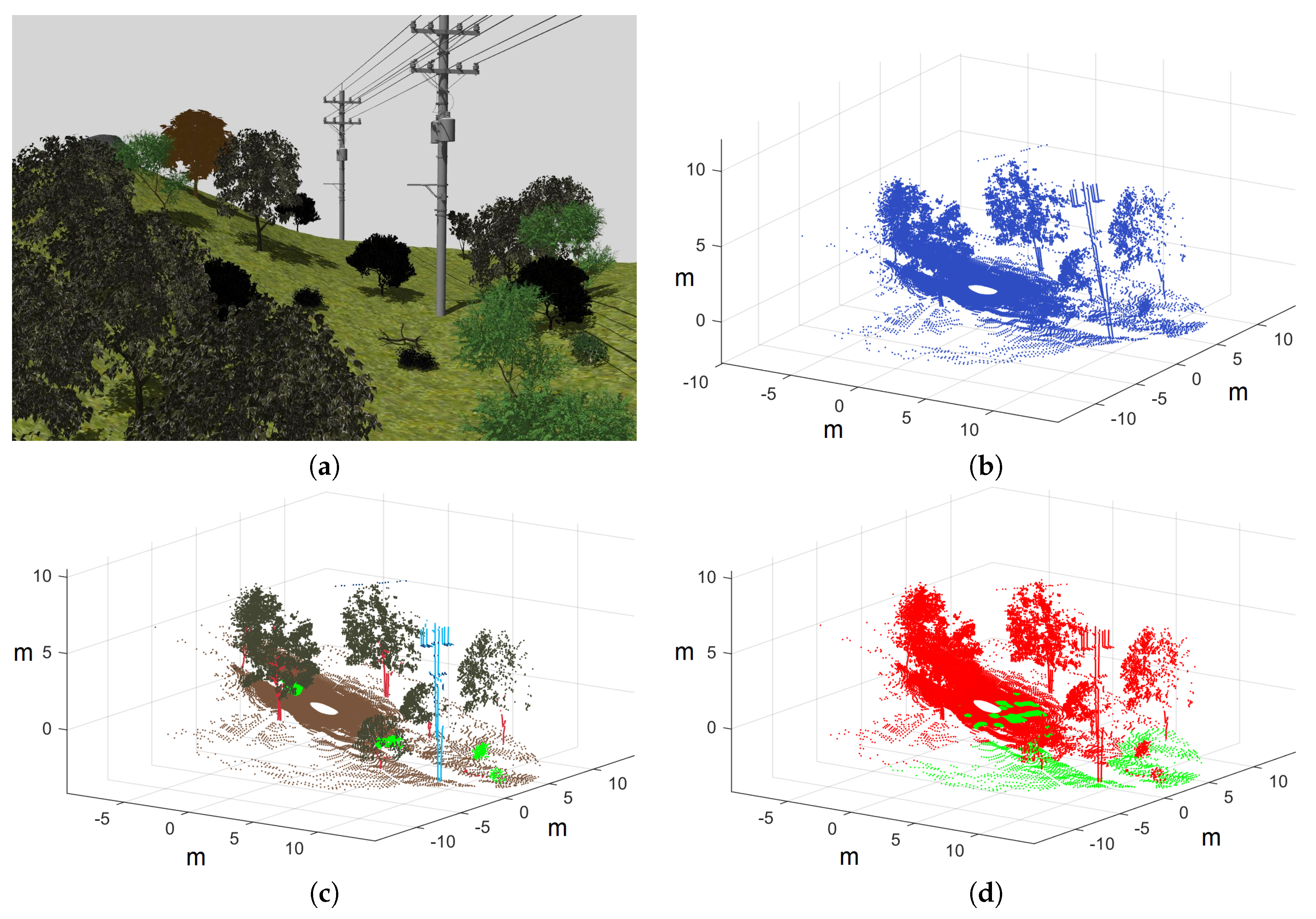
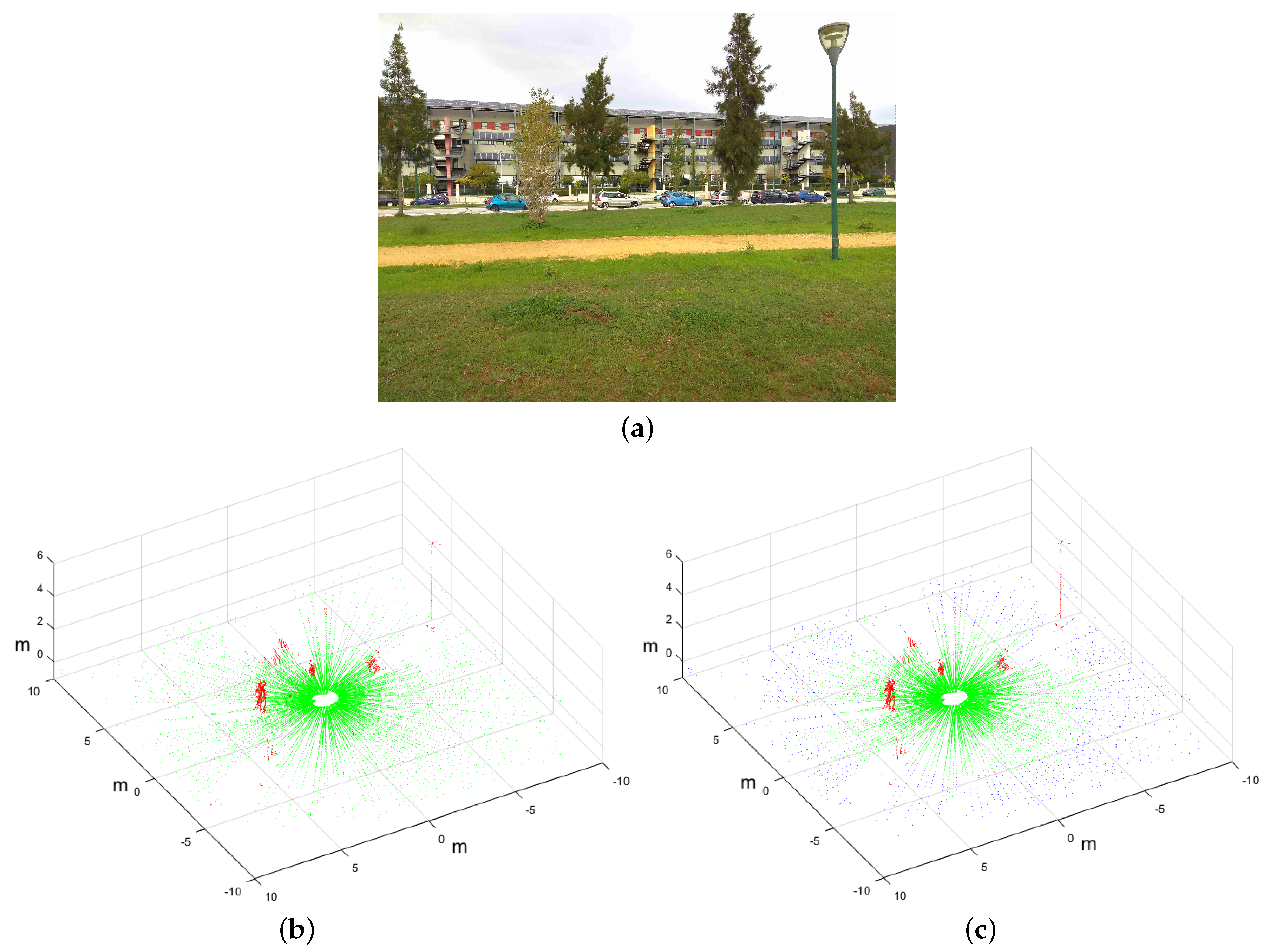
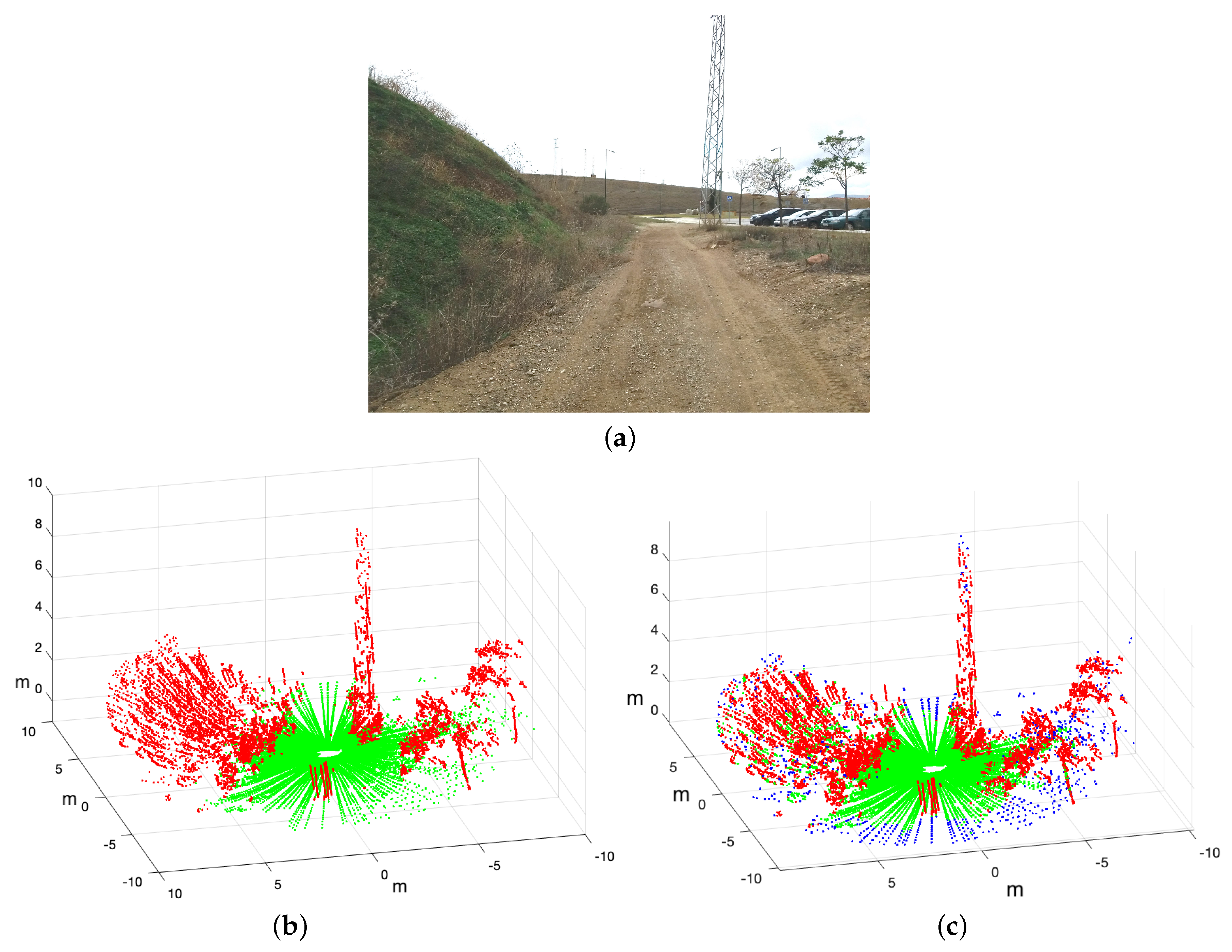
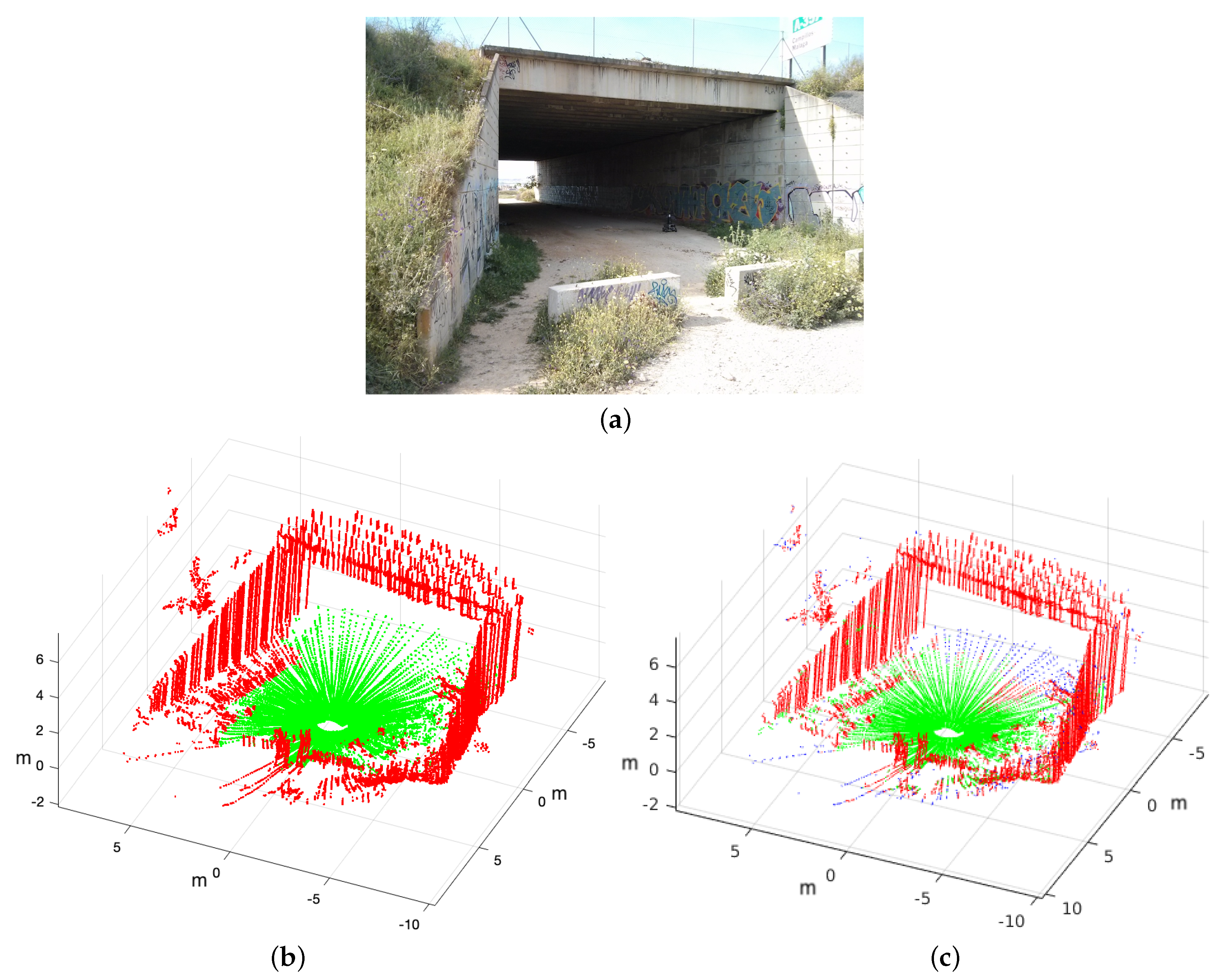
- (a)
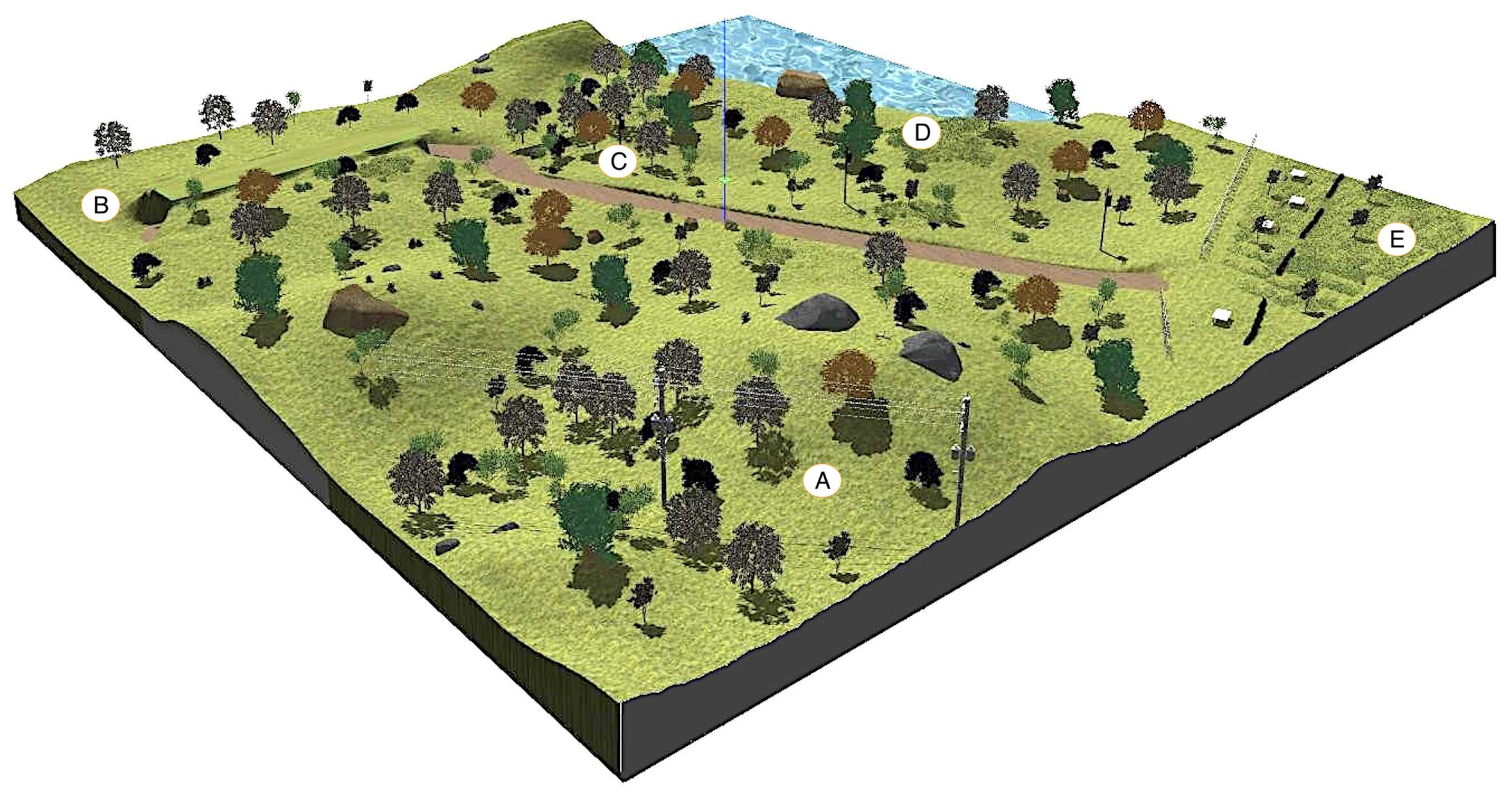
- Represents a view of the hills zone (A) built with Gazebo [22].
- (b)
- Shows a simulated 3D scan acquired with Andabata. The empty circle on the ground at the center of the laser scan corresponds to the blind area of the 3D sensor.
- (c)
- Represents the previous scan once it has been levelled and its 3D points tagged with different colours according to their intensity values [15].
- (d)
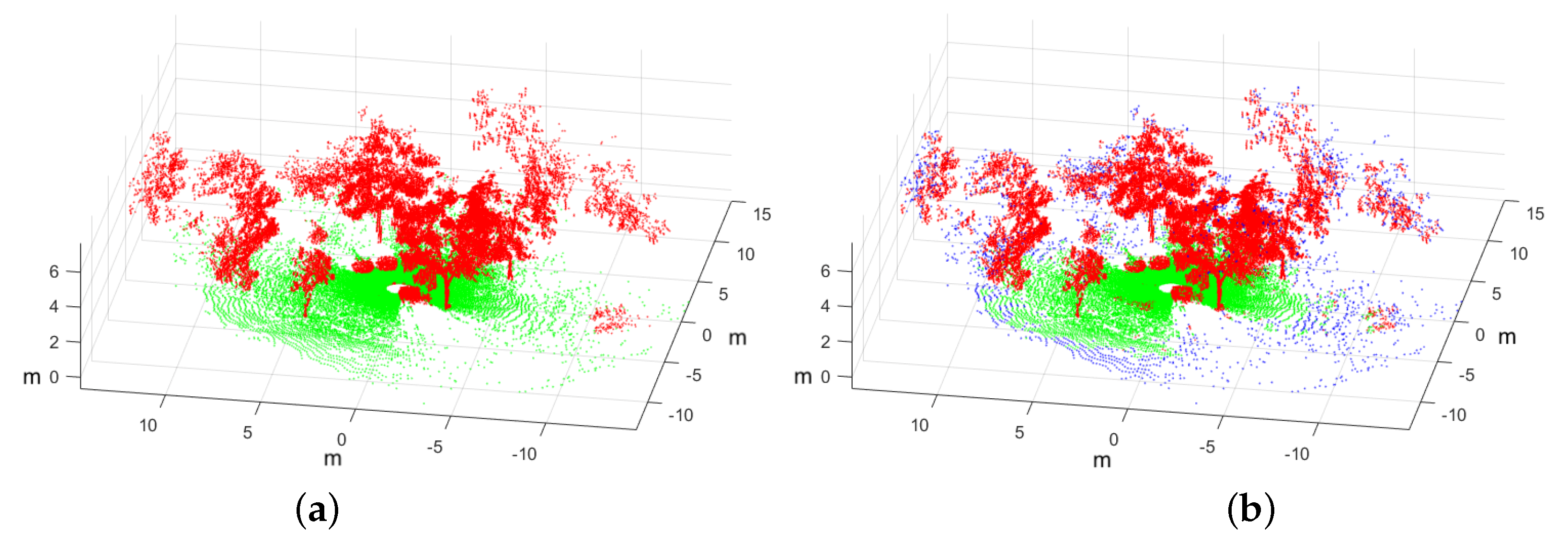
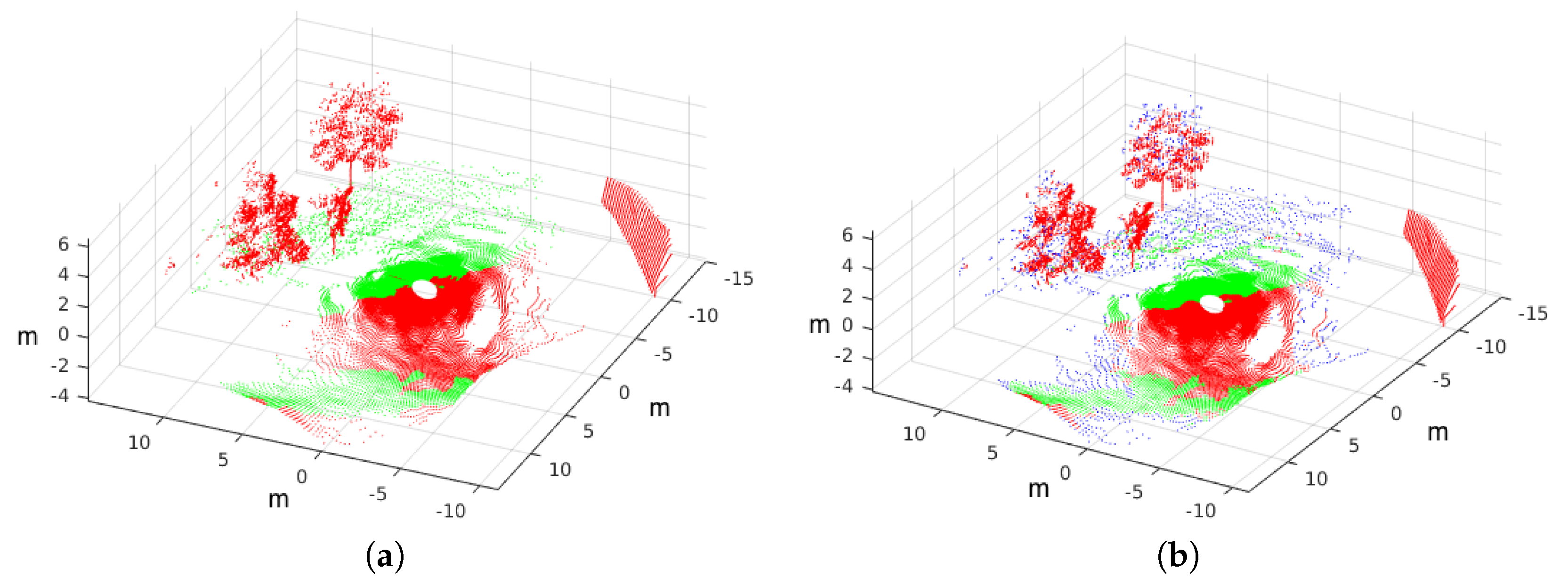
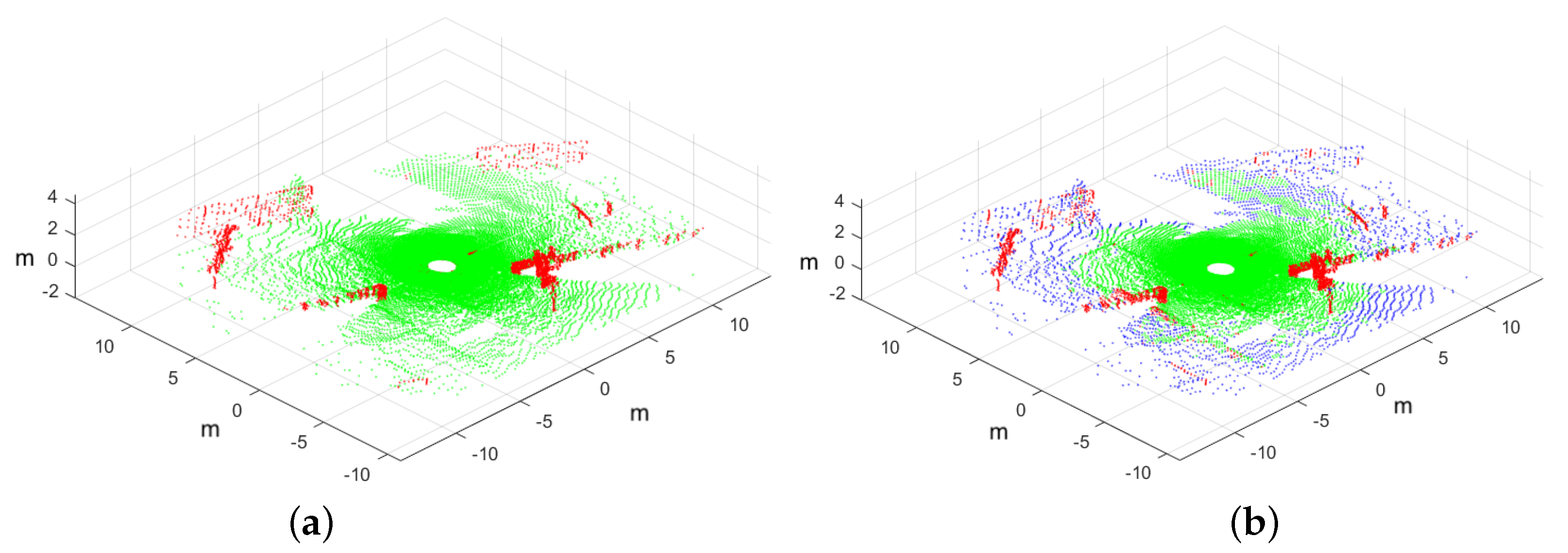
- Shows the traversable points of the laser scan in green colour, and the rest in red. In this case, non-traversable points originate from trees, bushes, the electric line and very sloped terrain.
3. Training Terrain Traversability
3.1. Feature Computation
3.2. Supervised Learning
4. Validating Traversability Classifiers
5. Classification Tests With Real 3D Laser Scans
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Papadakis, P. Terrain traversability analysis methods for unmanned ground vehicles: A survey. Eng. Appl. Artif. Intell. 2013, 26, 1373–1385. [Google Scholar] [CrossRef] [Green Version]
- Kostavelis, I.; Nalpantidis, L.; Gasteratos, A. Supervised traversability learning for robot navigation. Lect. Notes Artif. Int. 2011, 6856, 289–298. [Google Scholar]
- Zhang, K.; Yang, Y.; Fu, M.; Wang, M. Traversability assessment and trajectory planning of unmanned ground vehicles with suspension systems on rough terrain. Sensors 2019, 19, 4372. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhu, Q.; Wu, J.; Hu, H.; Xiao, C.; Chen, W. LIDAR point cloud registration for sensing and reconstruction of unstructured terrain. Appl. Sci. 2018, 8, 2318. [Google Scholar] [CrossRef] [Green Version]
- Bagnell, J.A.; Bradley, D.; Silver, D.; Sofman, B.; Stentz, A. Learning for autonomous navigation. IEEE Robot. Autom. Mag. 2010, 17, 74–84. [Google Scholar] [CrossRef]
- Droeschel, D.; Schwarz, M.; Behnke, S. Continuous mapping and localization for autonomous navigation in rough terrain using a 3D laser scanner. Robot. Auton. Syst. 2017, 88, 104–115. [Google Scholar] [CrossRef]
- Krusi, P.; Furgale, P.; Bosse, M.; Siegwart, R. Driving on point clouds: Motion planning, trajectory optimization, and terrain assessment in generic nonplanar environments. J. Field Robot. 2017, 34, 940–984. [Google Scholar] [CrossRef]
- Douillard, B.; Underwood, J.; Kuntz, N.; Vlaskine, V.; Quadros, A.; Morton, P.; Frenkel, A. On the segmentation of 3D LIDAR point clouds. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 2798–2805. [Google Scholar]
- Vu, H.; Nguyen, H.T.; Chu, P.M.; Zhang, W.; Cho, S.; Park, Y.W.; Cho, K. Adaptive ground segmentation method for real-time mobile robot control. Int. J. Adv. Robot. Syst. 2017, 14. [Google Scholar] [CrossRef] [Green Version]
- Lalonde, J.F.; Vandapel, N.; Huber, D.F.; Hebert, M. Natural terrain classification using three-dimensional ladar data for ground robot mobility. J. Field Robot. 2006, 23, 839–861. [Google Scholar] [CrossRef]
- Kragh, M.; Jorgensen, R.; Pedersen, H. Object detection and terrain classification in agricultural fields using 3D Lidar data. Lect. Notes Comput. Sci. 2015, 9163, 188–197. [Google Scholar]
- Xiong, X.; Munoz, D.; Bagnell, J.; Hebert, M. 3-D scene analysis via sequenced predictions over points and regions. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 2609–2616. [Google Scholar]
- Pomares, A.; Martínez, J.L.; Mandow, A.; Martínez, M.A.; Morán, M.; Morales, J. Ground extraction from 3D Lidar point clouds with the Classification Learner App. In Proceedings of the 26th Mediterranean Conference on Control and Automation (MED), Zadar, Croatia, 19–22 June 2018; pp. 400–405. [Google Scholar]
- Bellone, M.; Reina, G.; Caltagirone, L.; Wahde, M. Learning traversability from point clouds in challenging scenarios. IEEE Trans. Intell. Transp. Syst. 2018, 19, 296–305. [Google Scholar] [CrossRef]
- Sánchez, M.; Martínez, J.L.; Morales, J.; Robles, A.; Morán, M. Automatic generation of labelled 3D point clouds of natural environments with Gazebo. In Proceedings of the IEEE International Conference on Mechatronics (ICM), Ilmenau, Germany, 18–20 March 2019; pp. 161–166. [Google Scholar]
- Suger, B.; Steder, B.; Burgard, W. Traversability analysis for mobile robots in outdoor environments: A semi-supervised learning approach based on 3D-Lidar data. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 3941–3946. [Google Scholar]
- Santamaria-Navarro, A.; Teniente, E.; Morta, M.; Andrade-Cetto, J. Terrain classification in complex three-dimensional outdoor environments. J. Field Robot. 2015, 32, 42–60. [Google Scholar] [CrossRef] [Green Version]
- Ahtiainen, J.; Stoyanov, T.; Saarinen, J. Normal Distributions Transform Traversability Maps: LIDAR-Only Approach for Traversability Mapping in Outdoor Environments. J. Field Robot. 2017, 34, 600–621. [Google Scholar] [CrossRef]
- Shan, T.; Wang, J.; Englot, B.; Doherty, K. Bayesian generalized kernel inference for terrain traversability mapping. In Proceedings of the 2nd Conference on Robot Learning, Zurich, Switzerland, 29–31 October 2018; Volume 87, pp. 829–838. [Google Scholar]
- Hewitt, R.A.; Ellery, A.; de Ruiter, A. Training a terrain traversability classifier for a planetary rover through simulation. Int. J. Adv. Robot. Syst. 2017, 14, 1–14. [Google Scholar] [CrossRef]
- Chavez-Garcia, R.O.; Guzzi, J.; Gambardella, L.M.; Giusti, A. Learning ground traversability from simulations. IEEE Robot. Autom. Lett. 2018, 3, 1695–1702. [Google Scholar] [CrossRef] [Green Version]
- Koenig, K.; Howard, A. Design and use paradigms for Gazebo, an open-source multi-robot simulator. In Proceedings of the IEEE-RSJ International Conference on Intelligent Robots and Systems (IROS), Sendai, Japan, 28 September–2 October 2004; pp. 2149–2154. [Google Scholar]
- Martínez, J.L.; Morán, M.; Morales, J.; Reina, A.J.; Zafra, M. Field navigation using fuzzy elevation maps built with local 3D laser scans. Appl. Sci. 2018, 8, 397. [Google Scholar] [CrossRef] [Green Version]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Martínez, J.L.; Morales, J.; Reina, A.J.; Mandow, A.; Pequeño-Boter, A.; García-Cerezo, A. Construction and calibration of a low-cost 3D laser scanner with 360° field of view for mobile robots. In Proceedings of the IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015; pp. 149–154. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Estimator | Acronym | Time (s) |
|---|---|---|
| Decision Trees | DT | 3.3 |
| Gaussian Naive Bayes | GNB | 0.1 |
| K-Nearest Neighbors | KNN | 1.1 |
| Linear Support Vector Machine | LSVM | 136.3 |
| Bagged Decision Trees | BDT | 21.0 |
| Random Forest | RF | 8.1 |
| Gradient Boosted Trees | GBT | 41.3 |
| Estimator | TP | TN | FP | FN |
|---|---|---|---|---|
| Decision Trees | 111,912 | 252,446 | 10,007 | 11,594 |
| Gaussian Naive Bayes | 89,890 | 259,351 | 3102 | 33,616 |
| K-Nearest Neighbors | 111,538 | 256,915 | 5538 | 11,968 |
| Linear Support Vector Machine | 97,559 | 21,8384 | 44,069 | 25,947 |
| Bagged Decision Trees | 113,111 | 254,622 | 7831 | 10,395 |
| Random Forest | 112,547 | 257,396 | 5057 | 10,959 |
| Gradient Boosted Trees | 111,335 | 258,922 | 3531 | 12,171 |
| Estimator | PR | RE | F1 | BA | MC |
|---|---|---|---|---|---|
| Decision Trees | 0.918 | 0.906 | 0.912 | 0.934 | 0.871 |
| Gaussian Naive Bayes | 0.967 | 0.728 | 0.830 | 0.858 | 0.781 |
| K-Nearest Neighbors | 0.953 | 0.903 | 0.927 | 0.941 | 0.895 |
| Linear Support Vector Machine | 0.689 | 0.790 | 0.736 | 0.811 | 0.602 |
| Bagged Decision Trees | 0.935 | 0.916 | 0.925 | 0.943 | 0.891 |
| Random Forest | 0.957 | 0.911 | 0.934 | 0.946 | 0.904 |
| Gradient Boosted Trees | 0.969 | 0.901 | 0.934 | 0.944 | 0.906 |
| Classifier | TP | TN | FP | FN |
|---|---|---|---|---|
| Decision Trees | 66,060 | 80,747 | 6918 | 6059 |
| Gaussian Naive Bayes | 51,110 | 83,541 | 4123 | 21,010 |
| K-Nearest Neighbors | 64,810 | 84,887 | 6679 | 3408 |
| Linear Support Vector Machine | 69,630 | 74,623 | 13,192 | 2339 |
| Bagged Decision Trees | 66,423 | 81,624 | 6027 | 5710 |
| Random Forest | 67,390 | 81,175 | 6475 | 4744 |
| Gradient Boosted Trees | 65,025 | 80,657 | 7893 | 6209 |
| Classifier | PR | RE | F1 | BA | MC |
|---|---|---|---|---|---|
| Decision Trees | 0.905 | 0.916 | 0.911 | 0.919 | 0.836 |
| Gaussian Naive Bayes | 0.925 | 0.709 | 0.803 | 0.831 | 0.692 |
| K-Nearest Neighbors | 0.907 | 0.950 | 0.928 | 0.939 | 0.873 |
| Linear Support Vector Machine | 0.841 | 0.968 | 0.900 | 0.909 | 0.814 |
| Bagged Decision Trees | 0.917 | 0.921 | 0.920 | 0.926 | 0.852 |
| Random Forest | 0.912 | 0.934 | 0.923 | 0.930 | 0.859 |
| Gradient Boosted Trees | 0.892 | 0.913 | 0.902 | 0.912 | 0.822 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Martínez, J.L.; Morán, M.; Morales, J.; Robles, A.; Sánchez, M. Supervised Learning of Natural-Terrain Traversability with Synthetic 3D Laser Scans. Appl. Sci. 2020, 10, 1140. https://doi.org/10.3390/app10031140
Martínez JL, Morán M, Morales J, Robles A, Sánchez M. Supervised Learning of Natural-Terrain Traversability with Synthetic 3D Laser Scans. Applied Sciences. 2020; 10(3):1140. https://doi.org/10.3390/app10031140
Chicago/Turabian StyleMartínez, Jorge L., Mariano Morán, Jesús Morales, Alfredo Robles, and Manuel Sánchez. 2020. "Supervised Learning of Natural-Terrain Traversability with Synthetic 3D Laser Scans" Applied Sciences 10, no. 3: 1140. https://doi.org/10.3390/app10031140