Broadband Wireless Communication Systems for Vacuum Tube High-Speed Flying Train


Abstract
:1. Introduction
2. Key Challenges of Vactrain’s Wireless Communications
- (1)
- Propagation characteristics in the tube: For the design of wireless communications network, the knowledge of the wireless channel, which has a close relationship with propagation scenarios, is the fundamental basis. Different from traditional tunnel scenarios [21,22,23,24], which mainly consists of stone and clay, the vactrains are operating inside the fully enclosed metal tube wall, resulting in the unique propagation environment for wireless signal. From the aspect of waveguide, the concept of “mode“ can be used to analyze the propagation characterization of radio waves in the tube [25,26]. Based on this theory, the high-order mode gradually decays and disappears as the distance between transmitter and receiver increases, only leaving the low-order mode. Due to this reduction of modes, the signal subspace of the Multiple-Input, Multiple-Output (MIMO) channel matrix is decayed, resulting in a decrease in the capacity of the MIMO channel, that is, the keyhole effect [27,28,29]. In addition, if the leaky waveguide is adopted for wireless coverage, the leaky wave propagation coupling characteristics will be completely different. Due to the fully enclosed metal wall, the near-field radiation characteristics and the spatial distribution of the radiation power density will be greatly affected. Besides, the cross sectional shape and size of the metal tube will result in some unique characteristics of the mode distribution.
- (2)
- Fast and frequent handovers: Handover, or handoff, is the process by which a Mobile Station (MS) maintains its connection active while moving from one cell to another. Due to the ultra-high velocity, the handoff frequency of vactrain will be much higher than the current HSR under the same configuration of network. It is important to remark that the number of handovers on the systems must be minimized. However, the handover times of current railway communication system are in the order of 100 ms to 1 s, which are absolutely unacceptable for vactrain. For instance, a cell coverage radius of 300 m combined with a vactrain speed of 1000 km/h means a handover every 2.25 s, and in combination with a handover time of 1 s, the communication performance loss could reach up to 0.44. Same as HSR systems, the group handover is another problem when dozens of in-train MSs trying to handover at the same time, causing the so-called signaling storm, which greatly increases the handover load of network. Thus, the new handover strategies and algorithms need to be improved to meet the requirements of handovers in vactrain.
- (3)
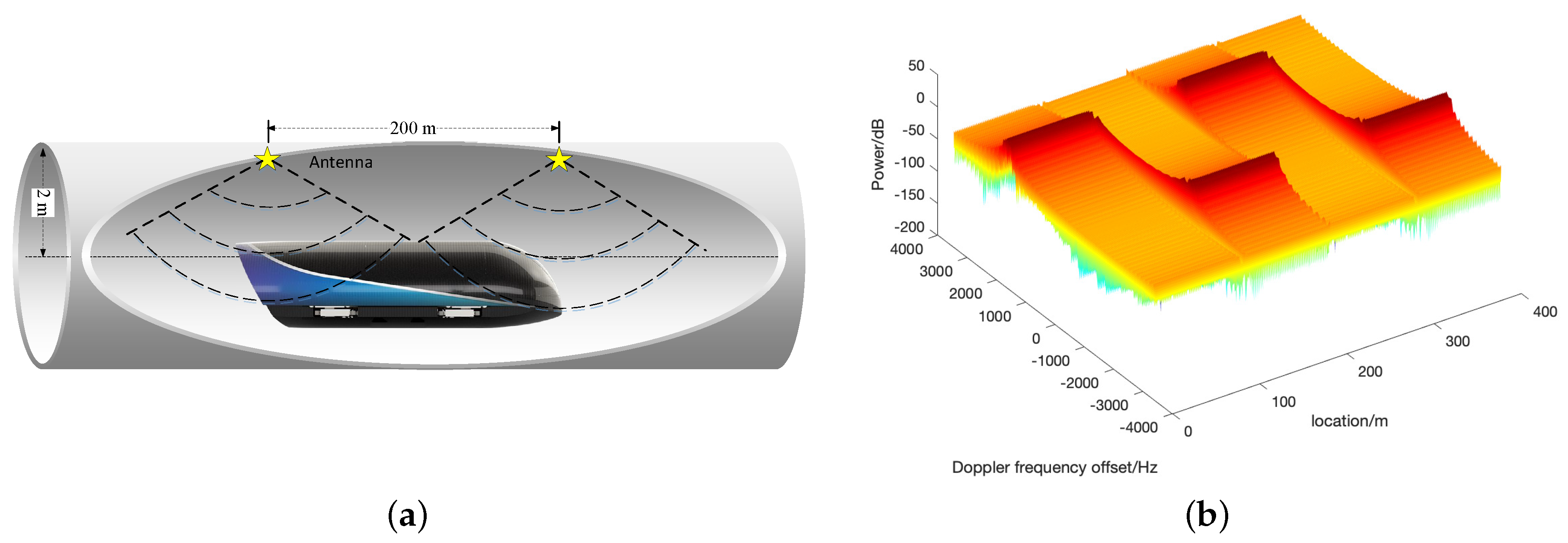
- Serious Doppler Frequency shift: When the velocity of the train reaches 1000 km/h, the channel impulse response will change rapidly, experiencing fast fading characteristics [30]. Therefore, the time selectivity is enhanced due to the large Doppler frequency shift and expansion. For example, if the carrier frequency is 3.3 GHz, the maximum Doppler frequency shift is 3055 Hz at a speed of 1000 km/h, whereas the frequency shift for a pedestrian who moves at a speed of 10 km/h is only 24 Hz. Note that most of the current wireless communication systems are designed for the Doppler frequency shift on the order of hundreds of Hz. Due to the high Doppler frequency shift, the carrier frequency offset (CFO) between the transmitter and receiver will occur. However, even for systems without Doppler shifts, small CFO may also occur due to the instability of oscillators in wireless transceivers. Thus, in the multi-carrier systems, such as Orthogonal Frequency Division Multiplexing (OFDM), the large Doppler frequency shift will destroy the orthogonality among the sub-carriers, and introduce the Inter-Carrier Interference (ICI). ICI will seriously degrade the synchronizer performance and increase the system bit error rate. In addition, the movement speeds of the terminals will change with respect to time, resulting in the time-varying Doppler spreads and non-stationary fading coefficients. Thus, the accurate modeling and analysis of high mobility channels inside the vacuum tube will be a challenging task.
- (4)
- High penetration loss: As is mentioned above, the vactrain is operating in the hermetically sealed vacuum tube. To ensure the air tightness, the tube walls are made of special alloys or reinforced concrete, which are difficult for wireless signals to penetrate. According to the measured date, the penetration loss caused by the train body is usually between 20 dB to 35 dB [31]. Under this superposed penetration losses, the Signal-to-Noise Ratio (SNR) on the received signal in both uplink and downlink will be seriously degraded.
- (5)
- Frequency spectrum-free environment: The co-channel interference is a serious problem in the current wireless communication for railway. For example, GSM-R in China uses the 883–889 MHz frequency band for the uplink and the 930–934 MHz frequency band for the downlink. This band is shared with services offered by the operator of China Mobile, and thus yield serious co-channel interference. In addition, Wireless Fidelity (WiFi) technology is used in the subway of China for train-to-ground communication and operates at 2.4 GHz [32], which is an unlicensed frequency band, causing serious interference and security problem. However, in scenarios of enclosed metal vacuum tube, the spectrum space in the tube is relatively free from the external environment. Thus, there will be no more the limitation of the frequency and bandwidth for wireless communication in the tube. Based on this, the frequency band and bandwidth can be selected unlimitedly to avoid interference from the user signal and then ensure the stability of wireless transmission of operational signal. Besides, the frequency/ space division multiplexing technologies [33] can also be adopted without limitation to increase the transmission capacity.
3. The Train-to-Ground Wireless Communication Needs
- (1)
- The operational services include
- the safety-related applications for operation of trains and signaling, also called “Operation Control System” (OCS), which typically integrated with “Traction Control System” (TCS);
- the robust Operational Voice Communication systems (OVC);
- Train Operation Status Monitoring data (TOSM);
- the image transmission for video surveillance: real-time HD video transmissions supporting automatic driving, security Closed Circuit Television (CCTV) in the train; and
- Passenger Information Service (PIS).
- (2)
- The services to passengers: it comprises mainly the Internet access on board trains, including business and entertainment such as on-vehicle video conference, online games, chatting, live broadcast, etc.
3.1. The Needs for Operational Services
- (1)
- Operation control systems: Through computer control, computer network, communication and information processing, and other advanced technologies [36,37], the operation control system is connected with the vehicle, traction [38], line, and turnout equipment or system of the maglev transportation system, and ultimately completes the tasks of train operation control, safety protection, automatic operation, and dispatch management. Similar to Shanghai maglev [7], the train operation systems for vactrain mainly consist of three layers: the central control system located in the control center, zone control systems corresponding to the traction section, and on-board control systems located on the train. As a critical service to train operation safety, OCS needs highest priority, end-to-end delay lower than 40 ms, and BER in the order of to ensure the reliable and robust communication. The bidirectional data transmission between zone control systems and train control systems could be provided by the train-to-ground communication system. These data mainly includes mobile authorization, temporary speed limit information, clock synchronization status, train identification number, etc., which requires the relatively short information coding length and small data size (most of the time less than 100 bytes), resulting in a low bandwidth requirement. Table 2 shows that the OCS bandwidth requirement of current railway transit does not exceed 500 Kbps per train. Thus, considering the higher safety requirements of vactrain, the minimum bandwidth of vactrain OCS could be set to 1 Mbps (up/down).
- (2)
- Traction Control System: Typically, TCS is integrated with OCS and deployed in the zone control systems which correspond to the traction sections. The TCS and OCS complement each other to ensure the safe operation of vactrain. To fully control the speed of vactrain, the train operational command data, such as velocity–position curve, should be transmitted to TCS from zone control systems through ethernet network. In addition, the magnetic pole phase angle data, which contains the train positioning information, needs to be transmitted from on-board control systems to TCS directly through the train-to-ground wireless links. This real-time train location information is the basis of automatic train driving, but is also an indispensable part of synchronous linear motor control and train interval control. Due to the vactrain’s ultra-high velocity, the transmission of train positioning information needs to meet the requirement of extreme low end-to-end delay [39]. As shown in Table 2, the TCS of Shanghai maglev train (430 km/h) needs the transmission delay of train-to-ground wireless communication less than 5 ms [14]. Assuming that the speed of vactrain exceeds 1000 km/h, and the transmission delay is inversely proportional to the speed, the transmission delay requirement for TCS of vactrain is less than 1 ms.
- (3)
- The robust operational voice communication systems: These systems allow not only trains to communicate with the rail traffic control centers, but also trains drivers, rail traffic, and maintenance agents to communicate with each others in conference mode (group calls). Besides, the train broadcasting function needs to be supported by OVC to realize the emergency call and passengers broadcasting. Thus, when emergencies occur, passengers can set up a call with the central disaster prevention dispatcher in time. The amount of information exchanged of the voice communication applications that involve safety can be low, but are demanding in terms of robustness and availability. Each route voice call needs a data rate of 32 Kbps. The service priority of OVC is only second to OCS. Thus, its communication requirements are similar to those of OCS, and include BER in the order of and transmission delay below 40 ms.
- (4)
- The image transmission for video surveillance: Image processing allows ensuring safety and security of railway systems. When an incident related to security occurs, the monitoring system supports the operator in making the good decision and provide all required information. In the HSR systems, the drivers can only obtain the images of the cabin through the cameras disposed inside the train. Note that vactrain operate at the mode of fully automatic driving, thus the traditional drivers are replaced by the Rail Traffic Control Centers (RTCC) to perform train dispatch, velocity control, and other operations. In this situation, the images of the train’s front, interior area, and that along the vacuum tube line also need to be transmitted to RTCC dispatchers in real-time. Especially in the case of malfunctions, the train needs to perform special operations under the control of RTCC, such as running in peristaltic mode and entering the evasion line. For these specific operations, the assistance of video surveillance system is indispensable. In addition, the number of CCTV cameras inside the cabin should also increase to improve the emergency disposal efficiency. Thus, when emergencies detection devices are activated, such as passenger emergency phones and smoke detection device, the images of accident scene could be transmitted to RTCC in time. Video surveillance services capture live 720p or 1080p true HD video images from High-Definition Television (HDTV) IP cameras and High-Definition Serial Digital Interface (HD-SDI) cameras located on the train’s body (for train operation) and the interior of the pod (for passengers condition monitoring). Typically, there is only one capsule/pod for vactrain, whose length is ~30 m [2]. The surveillance of train needs six cameras in total, including 2 HDTV cameras inside the train and four HD-SDI cameras outside the pod. Considering the transmission of the flow of six cameras, with 25 images per second, and a rate of compression of 1:50 (using H.264 compression algorithm for instance), the uplink throughput could be evaluated at ~15 Mbps. As for the video applications that involve security services (emergencies scenes and crime evidences), less capacity could be needed, but some QoS criteria are required, such as delay less than 300 ms, BER of about , cohabitation with other wireless systems without interference, etc.
- (5)
- Train monitoring systems: The constant increase of trains’ speeds, together with the vacuum scenarios, make the knowledge of the state of the train much important. Typically, Wireless Sensor Networks (WSNs) can be adopted to monitor the railway infrastructure and tube environment. WSNs allow the rise of large-scale information for everything related to the vactrain, the vacuum tube systems, and the infrastructure or the equipment diagnosis. Data collection could be related to the air tightness conditions, the infrastructure and vactrain aging, the power consumption, and the maintenance. In addition, the continuous monitoring with immediate processing of data is needed to observe real-time profile of train for instance. This implies small-sized packets (less than 500 bytes), thus less upload bandwidth could be needed, but high QoS criteria should be guaranteed to ensure the data real-time, completeness and accuracy. The upload bandwidth of TOSM systems could be set to 1 Mbps (up/down), with the required packet error rate in the order of and transmission delay less than 300 ms.
- (6)
- Passenger information service: PIS systems allow passengers to obtain the train arrival/departure time, weather conditions, and other convenient information. The HD digital video streaming with H.264 format and various text information are transferred from the RTCC to the train. Thus, a large capacity for the downlink is required in PIS systems, reaching up to 8 Mbps.
3.2. The Needs for Services to Passengers
4. Wireless Access for Vactrain
4.1. Traditional Solutions
- Satellite solution.
- Public cellular networks solutions.
- Solutions based on WiFi or WiMAX.
4.2. Leaky Waveguide Solution
- (1)
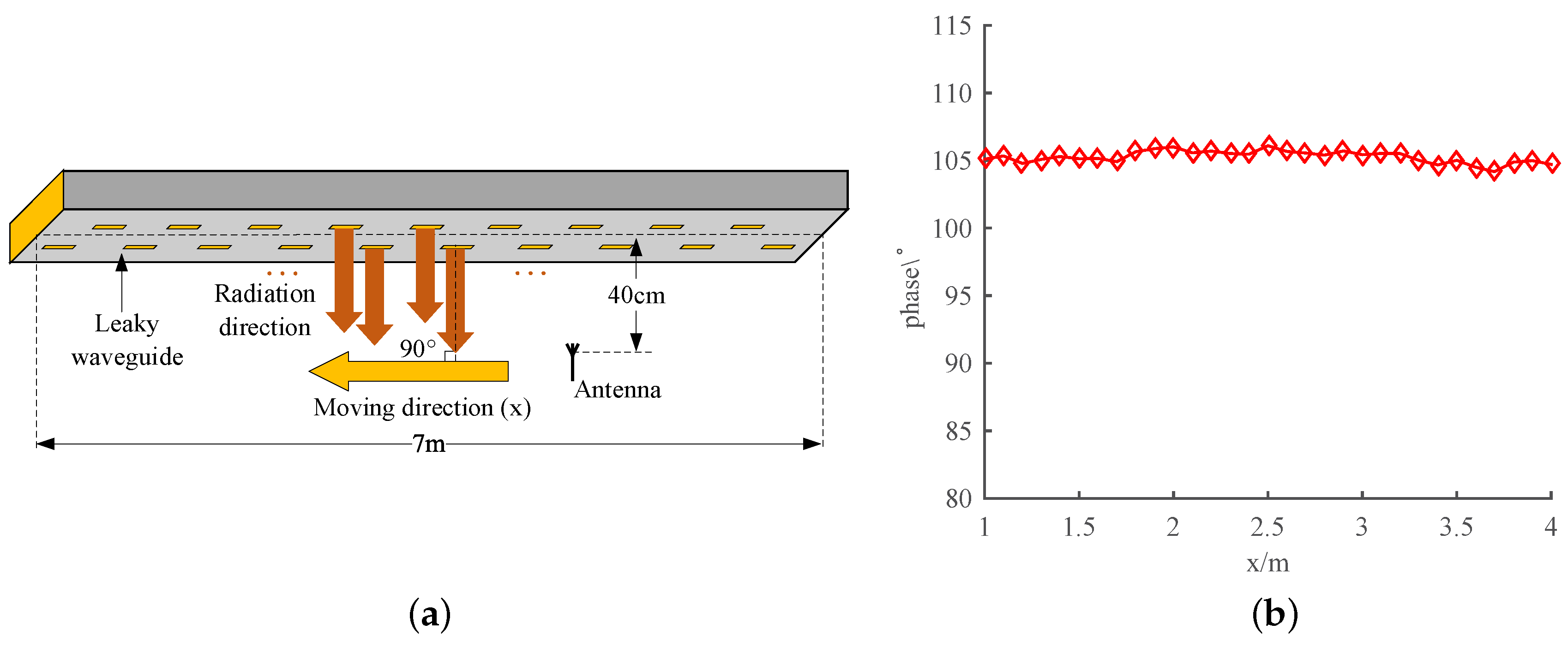
- Elimination of Doppler frequency shift: As is mentioned above, the large and time-varying Doppler frequency shift and Doppler spread is one of the distinguishing factors of vactrain’s train-to-ground communicaiton. Fortunately, the Doppler issue may be solved by introducing leaky waveguide. The leaky waveguide is installed on the ceiling of the vacuum tube, producing a cylindrical wave in the broadside direction of leaky waveguide [40]. Thus, the leaky wave always radiates vertically to the operating vactrain. Note that the wave radiated from different hole must have different wavefront when considering the propagation along the waveguide. To deal with this issue, the spacing between the adjacent holes is set to an integer multiple of the wavelength in the design of the waveguide. Thus, the phase of the wave arriving at each hole would be same, and so is the wave-front. Suppose the velocity of the receiving end is v, then the Doppler frequency shift can be presented aswhere represents Doppler frequency shift, is the maximum Doppler frequency shift, c is the speed of light, the carrier frequency is 3.3 GHz, and represents the incidence angle of radio wave. As is mentioned above, the angle between the train moving direction and the radiation direction of the leaky wave is always , which means equals to . According to Equation (1), the Doppler frequency shift can be calculated as , indicating that the Doppler frequency shift can be greatly suppressed or completely eliminated.
- (2)
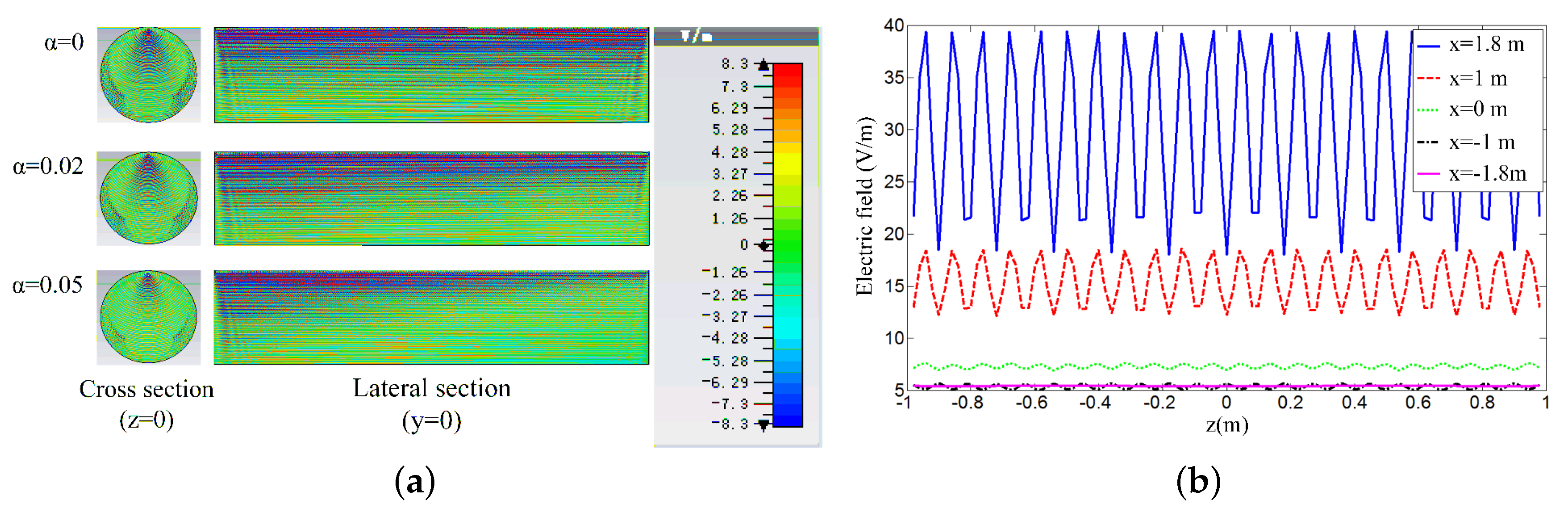
- Even field distribution: As the distance between the train receiving antenna and the leakage waveguide is close (~40–50 cm), the signal emitted by leaky waveguide is strong, with the relatively weak multi-path effect of the reflecting or scattering wave. Thus, the field distribution of leaky wave can be uniform at the train receiving antenna.
- (3)
- Simplification of communication mechanism: As is analyzed above, the Doppler frequency shift could be eliminated or decreased at a quite low level, which indicates that the fast time-variation of the fading channel could be greatly suppressed. In addition, the leaky wave field distribution is also even for vactrain. Thus, the wireless channel between train and the leaky waveguide will be conditioned stationary. This implies that the communication method can be simplified and the complicated communication coding technologies such as OFDM and LDPC can be avoided.
4.3. Simulation
4.3.1. Phase Distribution along Tube’s Axial Direction
4.3.2. Field Distribution in the Tube
5. Train-to-Ground Communication Architectures with Leaky Waveguide
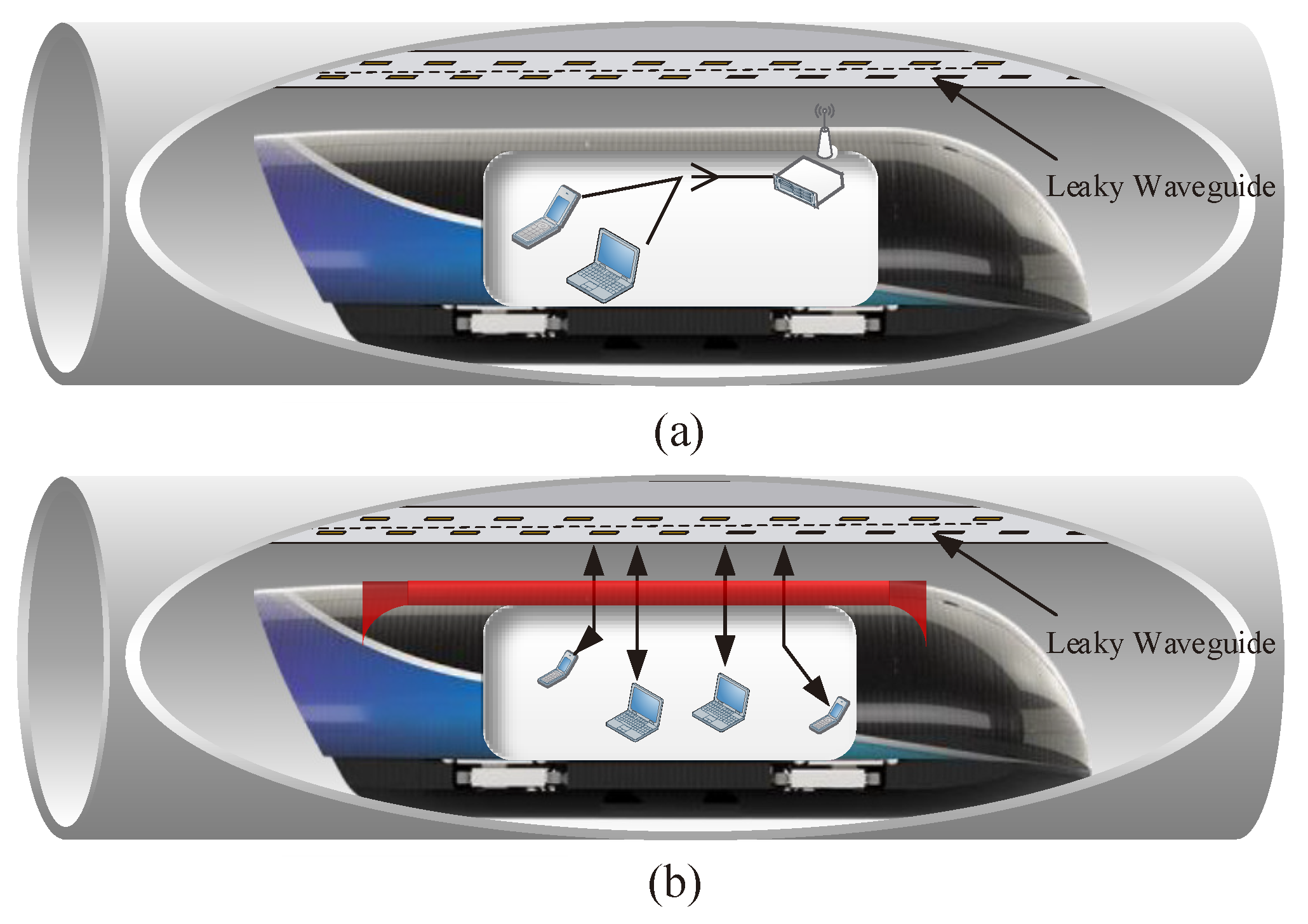
5.1. Mobile Relays
5.2. On-Train Leaky Lens
5.2.1. Refracted Surface Equation
- (1)
- Hyperboloid lens:As is shown in Figure 5a, the outer-surface is a plane perpendicular to x-axis, and thus there is no refraction for the wireless wave in this surface. Therefore, the inner-surface is the refracted surface, and its analytic expression could be deduced based on the optical theories. Assume that is the refractive index, where and are relative dielectric constant and relative magnetic permeability of the lens, respectively. According to the equal optical path principle, the optical path of the leaky wave from leaky waveguide to the inner-surface can be expressed aswhereCombine Equations (3)–(5), the analytic expression of the inner-surface can be expressed asAccording to Equation (6), we can see that the inner-surface is a hyperboloid, and the leaky waveguide (radiation sources) needs to be located at the focus or focus plane of the hyperboloid. The hyperboloid lens has the advantages of simple design, easy processing, as well as the effective suppression for sidelobe.
- (2)
- Ellipsoid lens:As is shown in Figure 5b, the inner-surface is a sphere with the radius r of , and it is parallel to the equiphase surface of the leaky wave, which means that there is no refraction in this surface. Similar to the hyperboloid lens, the analytic expression of the outer-surface (refracted surface) could be deduced based on the optical theories. According to the equal optical path principle, the optical path of the leaky wave from leaky waveguide to the outer-surface can be expressed aswhereCombine Equations (7)–(9), the analytic expression of the inner-surface can be expressed asAccording to Equation (10), we can learn that the outer-surface is an ellipsoid, and the leaky waveguide (radiation sources) needs to be located at the focus or focus plane of the ellipsoid. Compared to the hyperboloid lens, the caliber efficiency of ellipsoid lens is higher. Thus, the acceptable angle range of the incident leaky wave is larger, which implies the more even field distribution of the generated wave, the higher radiation efficiency, and then the higher system efficiency. However, there are two surfaces that need to be proceed for ellipsoid lens, which implies a large manufacturing cost.
5.2.2. Lens’ Thickness
6. Moving Cell Based on C-RAN
6.1. C-RAN Architecture for Vactrain
6.2. Moving Cell
7. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Jin, M.J.; Huang, L. Development status and trend of ultra high-speed vacuum pipeline transportation technology. Sci. Technol. Chin. 2018, 5, 13–15. [Google Scholar]
- Musk, E. Hyperloop Alpha; SpaceX: Hawthorne, CA, USA, 2013. [Google Scholar]
- Watch The First Real-World Test Of Hyperloop Technology. Available online: https://digg.com/2016/hyperloop-one-test-video-elon-musk (accessed on 12 May 2016).
- Hyperloop Transportation Technologies Begins Construction of Its First Test Track. Available online: https://www.engadget.com/2018/04/12/hyperloop-tt-begins-construction-of-its-first-test-track/ (accessed on 19 April 2018).
- Hyperloop Transportation Technologies to Build Hyperloop in Southwest China with Local Partner. Available online: https://technode.com/2018/07/19/elon-musk-to-build-hyperloop-in-southwest-china-with-local-partner/ (accessed on 20 July 2018).
- China’s Maglev Trains to Hit 1000 km/h in Three Years, Doc Brown to Finally Get 1985 Squared Away. Available online: https://www.engadget.com/2010/08/04/chinas-maglev-trains-to-hit-1-000kph-in-three-years-doc-brown/ (accessed on 31 August 2017).
- Yan, L. Development and application of the Maglev transportation system. IEEE Trans. Appl. Superconduct. 2008, 18, 92–99. [Google Scholar]
- Guo, H.; Wu, H.; Zhang, Y. GSM-R network planning for high speed railway. In Proceedings of the IET 3rd International Conference on Wireless, Mobile and Multimedia Networks (ICWMNN 2010), Beijing, China, 26–29 September 2010; pp. 10–13. [Google Scholar]
- He, R.; Ai, B.; Wang, G.; Guan, K.; Zhong, Z.; Molisch, A.F.; Briso-Rodriguez, C.; Oestges, C.P. High-speed railway communications: From GSM-R to LTE-R. IEEE Vehic. Technol. Mag. 2016, 11, 49–58. [Google Scholar] [CrossRef]
- Xiong, J.; Yu, K. Application of TD-LTE technology in Shuohuang Heavy-haul railway. Railw. Signall. Commun. Eng. 2015, 12, 20–24. [Google Scholar]
- Aguado, M.; Jacob, E.; Saiz, P.; Unzilla, J.J.; Higuero, M.V.; Matias, J. Railway signaling systems and new trends in wireless data communication. In Proceedings of the VTC-2005-Fall. 2005 IEEE 62nd Vehicular Technology Conference, Dallas, TX, USA, 28 September 2005; Volume 2, pp. 1333–1336. [Google Scholar]
- Zhu, L.; Yu, F.R.; Ning, B.; Tang, T. Cross-layer handoff design in MIMO-enabled WLANs for communication- based train control (CBTC) systems. IEEE J. Sel. Areas Commun. 2012, 30, 719–728. [Google Scholar] [CrossRef]
- Smith, K. LTE displays potential in Zhengzhou. Int. Railw. J. 2014, 54, 43. [Google Scholar]
- Zhou, M. Analysis on the technical characteristics of wireless communication between vehicles and grounds of Shanghai Maglev line. Urban Mass Transit 2010, 13, 26–29. [Google Scholar]
- Kim., J.; Il Kim, G. Distributed antenna system-based millimeter-wave mobile broadband communication system for high speed trains. In Proceedings of the 2013 International Conference on ICT Convergence (ICTC), jeju Island, Korea, 14–16 October 2013; pp. 218–222. [Google Scholar] [CrossRef]
- 3GPP TR 38.913. Study on Scenarios and Requirements for Next Generation Access Technologies; ETSI: Sophia Antipolis, France, 2018; Release 14. [Google Scholar]
- Zhou, T.; Tao, C.; Salous, S.; Liu, L. Geometry-based multi-link channel modeling for high-speed train communication networks. IEEE Trans. Intell. Transp. Syst. 2019, 1–10. [Google Scholar] [CrossRef]
- Masson, É.; Berbineau, M. Broadband Wireless Communications for Railway Applications; Springer International: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Zhou, T.; Tao, C.; Salous, S.; Liu, L. Measurements and analysis of short-term fading behavior in high-speed railway communication networks. IEEE Trans. Vehic. Technol. 2019, 68, 101–112. [Google Scholar] [CrossRef]
- Zhou, T.; Li, H.; Wang, Y.; Liu, L.; Tao, C. Channel modeling for future high-speed railway communication systems: A survey. IEEE Access 2019, 7, 52818–52826. [Google Scholar] [CrossRef]
- Guan, K.; Zhong, Z.; Ai, B.; Briso-Rodriguez, C. Propagation mechanism modelling in the near region of circular tunnels. IET Microw. Antennas Propag. 2012, 6, 355–360. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Briso, C.; Fernandez, J.R.O.; Alonso, J.I.; Rodríguez, C.; García-Loygorri, J.M.; Guan, K. Delay spread and electromagnetic reverberation in subway tunnels and stations. IEEE Antennas Wirel. Propag. Lett. 2016, 15, 585–588. [Google Scholar] [CrossRef]
- Guan, K.; Zhong, Z.; Ai, B.; Briso-Rodriguez, C. Propagation mechanism analysis before the break point inside tunnels. In Proceedings of the 2011 IEEE Vehicular Technology Conference (VTC Fall), San Francisco, TX, USA, 5–8 September 2011; pp. 1–5. [Google Scholar]
- Zhou, T.; Tao, C.; Salous, S.; Liu, L. Joint channel characteristics in high-speed railway multi-link propagation scenarios: Measurement, analysis, and modeling. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2367–2377. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, C.X.; Lopez, C.; Ge, X. 3D non-stationary wideband circular tunnel channel models for high-speed train wireless communication systems. Sci. Chin. Inf. Sci. 2017, 60, 082304. [Google Scholar] [CrossRef]
- Liu, Y.; Ghazal, A.; Wang, C.X.; Ge, X.H.; Yang, Y.; Zhang, Y.P. Channel measurements and models for high-speed train wireless communication systems in tunnel scenarios: a survey. Sci. Chin. Inf. Sci. 2017, 60, 101301. [Google Scholar] [CrossRef] [Green Version]
- Zhou, T.; Tao, C.; Liu, L. LTE-assisted multi-link MIMO channel characterization for high-speed train communication systems. IEEE Trans. Vehic. Technol. 2019, 68, 2044–2051. [Google Scholar] [CrossRef]
- Ghazal, A.; Wang, C.X.; Ai, B.; Yuan, D.; Haas, H. A nonstationary wideband MIMO channel model for high-mobility intelligent transportation systems. IEEE Trans. Intell. Transp. Syst. 2014, 16, 885–897. [Google Scholar] [CrossRef] [Green Version]
- Bian, J.; Sun, J.; Wang, C.; Feng, R.; Huang, J.; Yang, Y.; Zhang, M. A WINNER + based 3-D non-stationary wideband MIMO channel model. IEEE Trans. Wirel. Commun. 2018, 17, 1755–1767. [Google Scholar] [CrossRef]
- Wang, C.; Ghazal, A.; Ai, B.; Liu, Y.; Fan, P. Channel measurements and models for high-speed train communication systems: A survey. IEEE Commun. Surv. Tutor. 2016, 18, 974–987. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.; Chen, S.; Hu, H.; Su, X.; Shi, Y. TDD-based mobile communication solutions for high-speed railway scenarios. IEEE Wirel. Commun. 2013, 20, 22–29. [Google Scholar] [CrossRef]
- IEEE Standard 802.11. Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications; IEEE: New York, NY, USA, 2012. [Google Scholar]
- Zhou, T.; Tao, C.; Salous, S.; Liu, L. Measurements and analysis of angular characteristics and spatial correlation for high-speed railway channels. IEEE Trans. Intell. Trans. Syst. 2018, 19, 357–367. [Google Scholar] [CrossRef] [Green Version]
- Zhao, H.; Zhu, L.; Jiang, H.; Tang, T. Design and performance tests in an integrated TD-LTE based train ground communication system. In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), Quindao, China, 8–11 October 2014; pp. 747–750. [Google Scholar]
- Zhong, Z.D.; He, R.S.; Guan, K.; Ai, B.; Zhu, G.; Lei, L.; Wang, F.G.; Ding, J.W.; Xiong, L.; Wu, H. Dedicated Mobile Communications for High-Speed Railway; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Martino, L.; Read, J.; Elvira, V.; Louzada, F. Cooperative parallel particle filters for online model selection and applications to urban mobility. Digit. Signal Proc. 2017, 60, 172–185. [Google Scholar] [CrossRef] [Green Version]
- Watanatada, T.; Ben-Akiva, M. Forecasting urban travel demand for quick policy analysis with disaggregate choice models: A Monte Carlo simulation approach. Trans. Res. Part A General 1979, 13, 241–248. [Google Scholar] [CrossRef]
- Chopin, N.; Jacob, P.E.; Papaspiliopoulos, O. SMC2: An efficient algorithm for sequential analysis of state space models. J. R. Stat. Soc. Ser. B Stat. Method. 2013, 75, 397–426. [Google Scholar] [CrossRef] [Green Version]
- Elvira, V.; Martino, L.; Bugallo, M.F.; Djuric, P.M. Elucidating the auxiliary particle filter via multiple importance sampling [Lecture Notes]. IEEE Signal Proc. Mag. 2019, 36, 145–152. [Google Scholar] [CrossRef]
- Jackson, D.R.; Caloz, C.; Itoh, T. Leaky-Wave Antennas. Proc. IEEE 2012, 100, 2194–2206. [Google Scholar] [CrossRef]
- Wei, B.; Li, Z.; Liu, L.; Wang, J. Field distribution characteristics of leaky-wave system in the vacuum tube for high-speed rail. In Proceedings of the 2018 12th International Symposium on Antennas, Propagation and EM Theory (ISAPE), Hangzhou, China, 3–7 December 2018; pp. 1–3. [Google Scholar]
- Qiu, C.; Liu, L.; Liu, Y.; Li, Z.; Zhang, J.; Zhou, T. Key technologies of broadband wireless communication for vacuum tube high-speed flying train. In Proceedings of the 2019 IEEE 89th Vehicular Technology Conference (VTC2019-Spring), Kuala Lumpur, Malasya, 28 April–1 May 2019; pp. 1–5. [Google Scholar]
- Wu, J.; Fan, P. A survey on high mobility wireless communications: Challenges, opportunities and solutions. IEEE Access 2016, 4, 450–476. [Google Scholar] [CrossRef]
- Zhou, T.; Tao, C.; Salous, S.; Liu, L.; Tan, Z. Channel sounding for high-speed railway communication systems. IEEE Commun. Mag. 2015, 53, 70–77. [Google Scholar] [CrossRef] [Green Version]
- I, C.; Huang, J.; Duan, R.; Cui, C.; Jiang, J.X.; Li, L. Recent progress on C-RAN centralization and cloudification. Access IEEE 2014, 2, 1030–1039. [Google Scholar] [CrossRef]
- Gavrilovich, C.D. Broadband communication on the highways of tomorrow. Commun. Mag. IEEE 2001, 39, 146–154. [Google Scholar]
- Nakayama, Y.; Maruta, K.; Tsutsumi, T.; Sezaki, K. Optically backhauled moving network for local trains: Architecture and scheduling. IEEE Access 2018, 6, 31023–31036. [Google Scholar] [CrossRef]
- Lannoo, B.; Colle, D.; Pickavet, M.; Demeester, P. Radio-over-fiber-based solution to provide broadband internet access to train passengers [Topics in Optical Communications]. Commun. Mag. IEEE 2007, 45, 56–62. [Google Scholar] [CrossRef]
- Liu, P.; Liu, L.; Tao, C.; Sun, R. The study of C-RAN application on broadband wireless access for high-speed railway. In International Conference on Wireless Communications; IET: Stevenage, UK, 2014; pp. 226–230. [Google Scholar]
- Lee, S.; Kim, N.; Yun, H.; Kang, M. Optical switching based on position-tracking algorithm to realize “Moving Cells“ in a RoF network. In Proceedings of the 2008 10th International Conference on Advanced Communication Technology, Gangwon-Do, Korea, 17–20 February 2008; Volume 3, pp. 2170–2173. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technology | Datarate (DL/UL) | Working Frequency | Supporting Speed | Maturity |
|---|---|---|---|---|
| GSM-R | 172 Kbps | 885∼889 MHz(UL) 930∼934 MHz(DL) | <500 km/h | End of Life 2025 |
| LTE-R | 50 Mbps/10 Mbps | 450/800/1400 MHz | <500 km/h | Emerging |
| WLAN | 12 Mbps/12 Mbps | 2.4/5 GHz | <100 km/h | Widely adopted |
| LTE-M | 50 Mbps/10 Mbps | 1.785∼1.805 GHz | <500 km/h | Emerging |
| 28G mmW | 2000 Mbps | 27 GHz | <400 km/h | Emerging |
| 38G mmW (Maglev) | 8 Mbps/4 Mbps | 37.1∼38.5 GHz | <500 km/h | Mature |
| Data Type | End-to-end Transmission Delay/ms | Data Rate / Kbps | Bit Error Rate | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Urban Rail | HSR | Mglev | Vactrain | Urban Rail | HSR | Mglev | Vactrain | Urban Rail | HSR | Mglev | Vactrain | |||||
| UL | DL | UL | DL | UL | DL | UL | DL | |||||||||
| OCS | 100 | 50 | 40 | 40 | 200/train | 200/train | 200/train | 1000/train | ||||||||
| TCS | 5 | 1 | ||||||||||||||
| OVC | 100 | 100 | 40 | 40 | 32/ channel | 32/channel | 32/channel | 32/channel | ||||||||
| TOSM | 300 | 150 | 300 | 300 | 100 | - | 200 | - | 200 | - | 1000 | - | ||||
| Video | 300 | 150 | 300 | 300 | 6000 | - | 4000 | - | 4000 | - | 18000 | - | ||||
| PIS | 300 | 300 | 300 | 300 | 100 | 8000 | 100 | 1000 | 100 | 1000 | 100 | 8000 | ||||
| Error Tolerant | Error Intolerant | |
|---|---|---|
|
Interactive (delay ≪ 1 s) | Conversational voice and video | Interactive games |
|
Responsive (delay ≈ 2 s) | Voice/video messaging | Web browsing |
|
Timely (delay ≈ 10 s) | Audio and video streaming | Messaging, downloads |
|
Non-critical (delay ≫ 10 s) | Fax | Background |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiu, C.; Liu, L.; Han, B.; Zhang, J.; Li, Z.; Zhou, T. Broadband Wireless Communication Systems for Vacuum Tube High-Speed Flying Train. Appl. Sci. 2020, 10, 1379. https://doi.org/10.3390/app10041379
Qiu C, Liu L, Han B, Zhang J, Li Z, Zhou T. Broadband Wireless Communication Systems for Vacuum Tube High-Speed Flying Train. Applied Sciences. 2020; 10(4):1379. https://doi.org/10.3390/app10041379
Chicago/Turabian StyleQiu, Chencheng, Liu Liu, Botao Han, Jiachi Zhang, Zheng Li, and Tao Zhou. 2020. "Broadband Wireless Communication Systems for Vacuum Tube High-Speed Flying Train" Applied Sciences 10, no. 4: 1379. https://doi.org/10.3390/app10041379