Sampling-Based Motion Planning for Free-Floating Space Robot without Inverse Kinematics

Abstract
:1. Introduction
- For random configuration guiding growth, three local planning schemes can be found for the motion planning of robots with differential constraints. The first scheme selects a random action and integrates for a certain period of time from the node to be extended with this action. The selected action is treated as a constant during the integration. The second scheme solves a two-point boundary value problem. The third scheme gives several actions that are reasonably distributed in the action space and then integrates for a certain period of time from the node to be extended with these actions. The selected actions are also treated as constants during the integration. Finally, the action with an integration result that is closest to the guiding point is chosen. Obviously, the first and third schemes are not convenient for considering the base disturbance, and the second scheme is time-consuming. This paper proposes a control-based local planner for random configuration guiding growth of the tree. Actions are selected according to the error between the guiding point and the point to be expanded in this local planner. This local planner can achieve rapid local planning and restrict the base attitude disturbance.
- For goal EE pose guiding growth, the requirements of base attitude disturbance cannot be omitted. For JT-RRTs, only the error of EE needs to be considered in the local planning of goal EE pose guiding growth. In JT-RRTs, the DOF of the EE pose is 6, while the DOF of joint space is 7, which is redundant relative to the former. However, the local planner for FFSRs must deal with not only the error of EE but also the base disturbance, which has another 3 DOF. This paper proposes a control-based goal EE pose guiding local planner (CB-EEPG-LP) for goal EE pose guiding growth. Different from the local planner in JT-RRTs, CB-EEPG-LP can not only guide the tree toward the goal pose but also coordinate the base attitude when necessary. The actions are designed based on two kinds of errors: the first is the error between the goal EE pose and the EE pose corresponding to the configuration to be expanded, and the second is the error between the reference goal base attitude and the attitude corresponding to the configuration to be expanded. The proposed local planner can complete the goal EE pose guiding growth and avoid singularity as much as possible. Moreover, the base attitude disturbance meets the requirements.
2. Motion Equations of an FFSR
2.1. Basic Equations of Motion in Position Form
2.2. Basic Motion Equation and Momentum Conservation Equation in Velocity Form, Jacobian Matrix
2.3. Calculation of the Location of Feature Points Based on Configuration Parameters
3. Motion Planning Algorithm for FFSRs
| Algorithm 1 RRTs for Free-Floating Space Robots | |||
| 1 | Tree.V.init(q_I) | ||
| 2 | for i = 1 to K do | ||
| 3 | If1 rand() < p_g | ||
| 4 | [q_new, Local_Traj, is_Reaching_Goal, Is_Extend] = Extend_Toward_Goal() | ||
| 5 | Else | ||
| 6 | [q_new, Local_Traj, Is_Extend] = Extend_Randomly() | ||
| 7 | End if1 | ||
| 8 | If2 Is_Extend = true | ||
| 9 | Tree.Add(q_new, Local_Traj) | ||
| 11 | End if2 | ||
| 12 | If3 is_Reaching_Goal = true | ||
| 13 | Break; | ||
| 14 | End if3 | ||
| 15 | End for | ||
| 16 | Return tree | ||
3.1. Overview of the Algorithm
- Random sampling: The configuration space of the FFSR includes the joint space and the space of the base attitude. In order to meet the constraint on base attitude disturbance, it is necessary to limit the sampling space of the base attitude.
- Selection of node to be expanded: Different selection criteria should be considered for GEE-GG and RC-GG when selecting . For the former, the requirement of avoiding larger base disturbances must be considered, so greater weight to the change of base attitude should be provided during the design of the metric. For the latter, the pose change of the EE should be used as the major part of the metric design.
- Local planning: This article designs two types of local planner; one of them is for RC-GG, another is for GEE-GG. The details of these two local planners will be presented in Section 3.2.
- Collision detection: First, in order to test whether a certain configuration is in collision, the centroid position and attitude of each rigid body of the FFSR can be calculated through the related methods in Part 2. Combined with the size parameters of each rigid body, the area occupied by each rigid body in space can be calculated. Then, collision detection can be completed according to the corresponding collision detection algorithm. Second, according to the previous statement, we can see that every local planning scheme has an integration process Each integration will produce a new configuration. The new configuration may change very little from the last configuration because the step length of the integration may be very small. Therefore, it is not necessary to detect the new configuration generated in each integration. In the collision detection module of the planner, a new mechanism is introduced to determine when to perform collision detection. This mechanism will be stated in the local planning section.
3.2. Local Planning
3.2.1. Local Planner for Random Configuration Guiding Growth
| Algorithm 2 Extend_Randomly with Control Based Local Planner | |||
| 1 | q_Sample = Random_Config() | ||
| 2 | q_Near = Nearest_Node(Tree, q_Sample); q_Present = q_Near; Last_Checked_Config = q_Present | ||
| 3 | Shall_End = false | ||
| 4 | While (Shall_End = false) | ||
| 5 | J_Base = Jacobian_Base(q_Present) | ||
| 6 | J_x = [J_Base; eye(n, n)] | ||
| 7 | Delta_q = q_sample − q_present | ||
| 8 | Dot_Joint = pinv(J) * Delta_q; Dot_Base = J_Base * Dot_Joint | ||
| 9 | q_Present = q_Present + [Dot_Base; Dot_Joint] * time_step | ||
| 10 | If Max(q_present − last_Checked_Config) ≥ Collision_Check_Tresh_Hold | ||
| 11 | Is_Collision = Collision_Check(q_Present) | ||
| 12 | last_Checked_Config = q_Present | ||
| 13 | End if | ||
| 14 | Shall_End = is_Collision or is_q_Present_over_Tresh_Hold or is_Extend_over_Tresh_hold | ||
| 15 | End while | ||
| 16 | Is_Extend = if q_Present is far enough from q_Near | ||
| 17 | Return | ||
- Iterative local planning: This process corresponds to Lines 4 to 15 of the pseudo-code. Firstly, the configuration error between and the random configuration is calculated; we defined this error as . Secondly, at is calculated, which can be used to obtain the Jacobian matrix . Through the pseudo-inverse of , can be mapped to the action space to get joint angular velocitycan be reduced if the robot moves with at . By multiplying by , corresponding to can be obtained. Integrating and from , a new configuration is obtained, and we let this configuration be the next . Repeat the above process until the termination condition of local planning is triggered, then exit local planning and return to the new configuration and trajectory.
- Collision detection mechanism: The collision detection mechanism corresponds to Lines 2 and 10–12 of the pseudo-code. In the second line of the algorithm, is selected from the tree and is collision-free. Therefore, is recorded as the last detected free configuration. During iterative local planning, the configuration is gradually changed. The algorithm determines whether collision detection is required, corresponding to the 10th line of the algorithm. The judgment condition is whether the difference between the current configuration and the last detected free configuration reaches a certain threshold. If collision detection is performed after the judgment, the current configuration is recorded as the new last-detected free configuration.
- Termination conditions and return for iterative local planning: (1) The collision detection program detects a collision; (2) the configuration exceeds the limit, that is, the base attitude disturbance exceeds the limit or the joint angle exceeds the range; (3) among the configuration parameters, the maximum expansion value reaches a certain threshold. When any one of these three conditions is met, iterative local planning is terminated. Then, in Line 17 of the pseudo-code, the algorithm tests if the tree is extended far enough from the initial . If the generated new configuration is very close to , then we let Is_Extend equal to false, and the local planning results will not be added to the tree.
- Remark of parameter setting: In Algorithm 2, there are some parameters that need to be set. (1) Collision_Check_Tresh_Hold: This is a threshold that decides the number of collision detections when running the algorithm. It cannot be set too large or the collision detection will miss some configurations in collision. Additionally, it cannot be set too small or unnecessary collision detection will be carried out and the algorithm will be too slow. This threshold is set at 1 degree in the simulation study, and it worked well. (2) is_Extend_over_Tresh_hold: This is a mark that indicates whether the extend is far enough from the node to be extended. Additionally, it relates to a threshold. This threshold is similar to the step length in geometric path planning using RRTs. Unlike RRTs for geometric path planning, choosing this threshold properly is not very important. In geometric path planning using RRTs, we should choose a proper step length for the local planner. If the step length is too large, the collision is easy to detect and local planning will easily fail. If the step length is too small, the algorithm will be slow. Collision detection in this paper is different from that of geometric path planning using RRTs, which is based on dichotomy. Therefore, we can choose a large value for this threshold. This threshold is set at 90 degrees in the simulation study, and it worked well.
3.2.2. Local Planner for Goal EE Pose Guiding Growth
- Iterative local planning: This process corresponds to Lines 3 to 19 of the pseudo-code. For local planning corresponding to GEE-GG, the purpose is to extend the node toward the goal EE pose as much as possible. Moreover, the base attitude disturbance is required to be within a certain limit. First, in each iteration, two kinds of errors are calculated. The first kind is , which denotes the error between the goal EE pose and the EE pose at . The second kind is , which denotes the error between the referred target base attitude and the base attitude at . is not the target base attitude that the planner needs to achieve accurately. is only used as a reference for starting the base coordination mechanism. Secondly, and at are calculated. Based on the pseudo-inverse of , is mapped to the action space to get joint angular velocity .can be reduced if the robot moves with from . If reaches a certain threshold , base attitude coordination is triggered. Then, the base attitude is adjusted using the pseudo-inverse of within the null space of , and an action that can reduce is generated.If base attitude coordination is triggered, is combined with to form the final action for a single iteration.Otherwise, the final action for a single iteration only includes . Then, multiplying by , corresponding to can be obtained. Integrating and from , a new configuration is obtained, and we let this configuration be the next . Repeat the above process until the termination condition of local planning is triggered, then exit local planning and return to the new configuration and trajectory.
- Base coordination mechanism: The base coordination mechanism corresponds to Lines 4 and 7–11 of the pseudo-code. The reason for designing this mechanism is as follows: First, the joint space has 7 DOF, while the EE pose task has 6 DOF and the base attitude has 3 DOF. Secondly, the main task of the planner is to plan a trajectory for the EE to reach the goal pose, and the base attitude is not required to reach a certain value accurately. Actually, the base attitude just needs to be coordinated to keep its disturbance within a certain range. Moreover, adjusting the base attitude within the null space of the generalized Jacobian matrix is prone to singularity. It should be avoided as much as possible. Therefore, this paper introduces a reference goal base attitude and a threshold to guide the adjustment of the base attitude. is designed according to the base attitude disturbance limit interval . It is usually chosen at the center of this interval. is less than half of the length of . denotes the error between the base attitude corresponding to and the reference target base attitude. In each iteration of local planning, if is less than , the base attitude will not be adjusted. If is greater than , the base attitude is adjusted. In this way, this base attitude coordination mechanism avoids the occurrence of singularities in each iteration of local planning as much as possible. Meanwhile, the base attitude disturbance can meet the requirements.
| Algorithm 3 Extend_Toward_Goal | |||
| 1 | q_Near = Nearest_Node(Tree, X_Goal); q_Present = q_Near; Last_Checked_Config = q_Present | ||
| 2 | Shall_End = false | ||
| 3 | While (Shall_End = false) | ||
| 4 | J_base = Jacobian_Base(q_Present); General_J = General_Jacobian(q_Present) | ||
| 5 | Delta_X = X_Goal − f_EE(q_Present); Delta_q_Base = q _Goal_Base - q_Present_Base | ||
| 6 | Dot_Joint_For_EE = pinv(General_J) * Delta_x | ||
| 7 | If Max(Delta_q_Base) > Base_Adjust_Tresh_Hold | ||
| 8 | Dot_Joint_For_Base_Adjust = pinv(J_base * Null(General_J)) * Delta_q_Base | ||
| 9 | Else | ||
| 10 | Dot_Joint_For_Base_Adjust = 0 | ||
| 11 | End if | ||
| 12 | Dot_Joint = Dot_Joint_For_EE + Null(General_J) * dot_joint_For_Base_Adjust Dot_Base = J_base * dot_joint | ||
| 13 | q_Present = q_Present + [Dot_Base; Dot_Joint] * Time_Step | ||
| 14 | If Max(q_Present − Last_Checked_Config) ≥ Collision_Check_Tresh_Hold | ||
| 15 | Is_Collision = Collision_Check(q_Present) | ||
| 16 | last_Checked_Config = q_Present | ||
| 17 | End if | ||
| 18 | Shall_End = Is_Collision or Is_Q_Present_Over_Tresh_Hold or Is_Reaching_The_Goal or Is_Over_Iteration | ||
| 19 | End while | ||
| 20 | Is_Extend = if q_Present is far enough from q_Near | ||
| 21 | Return | ||
- C.
- Collision detection mechanism: The collision detection mechanism is the same as that in Section 3.2.1
- D.
- Termination conditions and return for iterative local planning: (1) The collision detection module detects a collision; (2) the configuration exceeds the limit, that is, the base attitude disturbance exceeds the limit or the joint angle exceeds its range; (3) the target is reached; (4) the number of iterations reaches the upper limit. When any one of these four conditions is met, iterative local planning is terminated. Then, in Line 17 of the pseudo-code, the algorithm tests if the tree is extended far enough from the initial . If the generated new configuration is very close to , then we let Is_Extend equal to false, and the local planning results will not be added to the tree.
4. Simulation
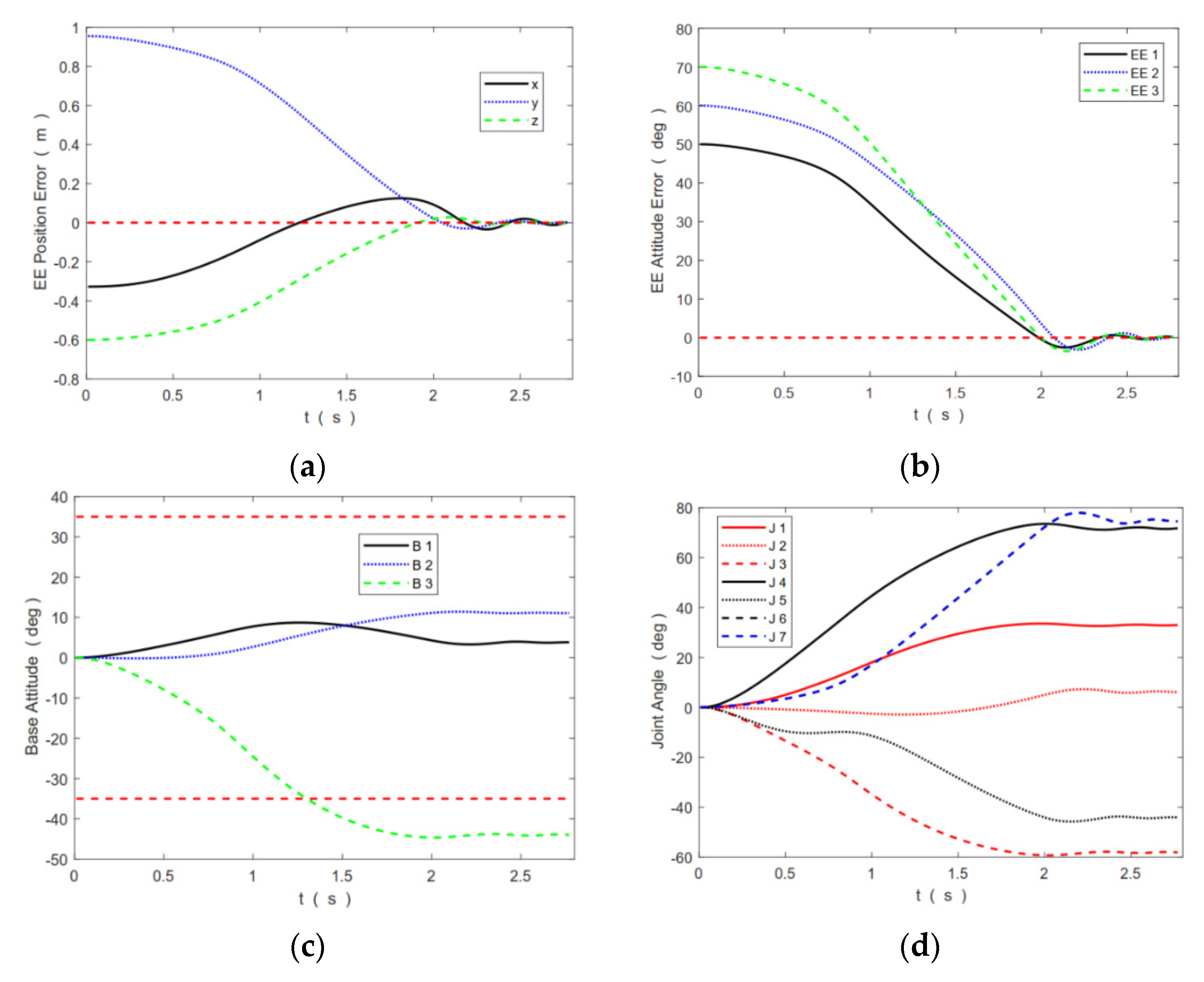
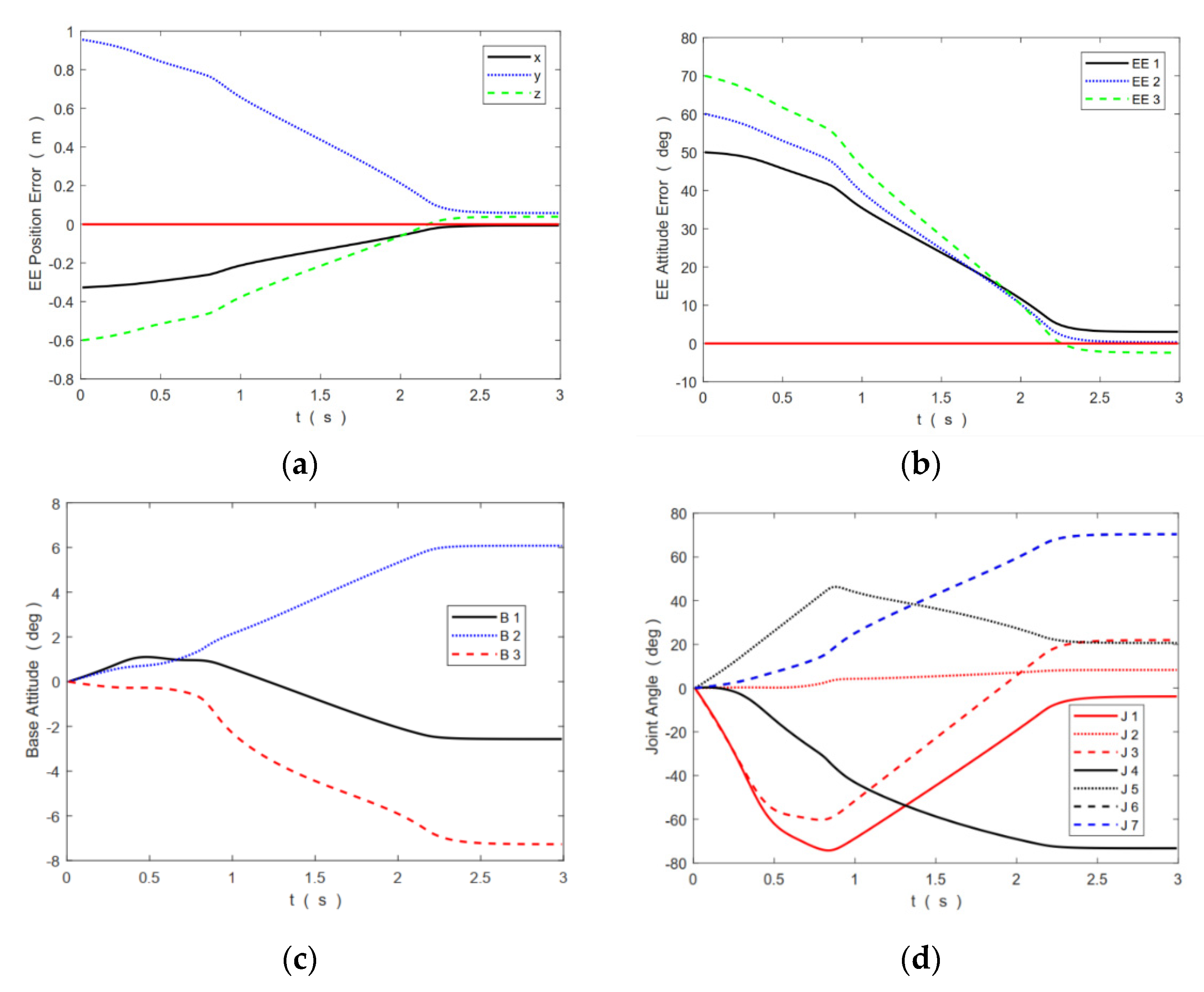
4.1. The Advantages of a Local Planner for Goal EE Pose Guiding Growth
4.2. Verification of the Effectiveness of the Proposed RRTs for Free-Floating Space Robots
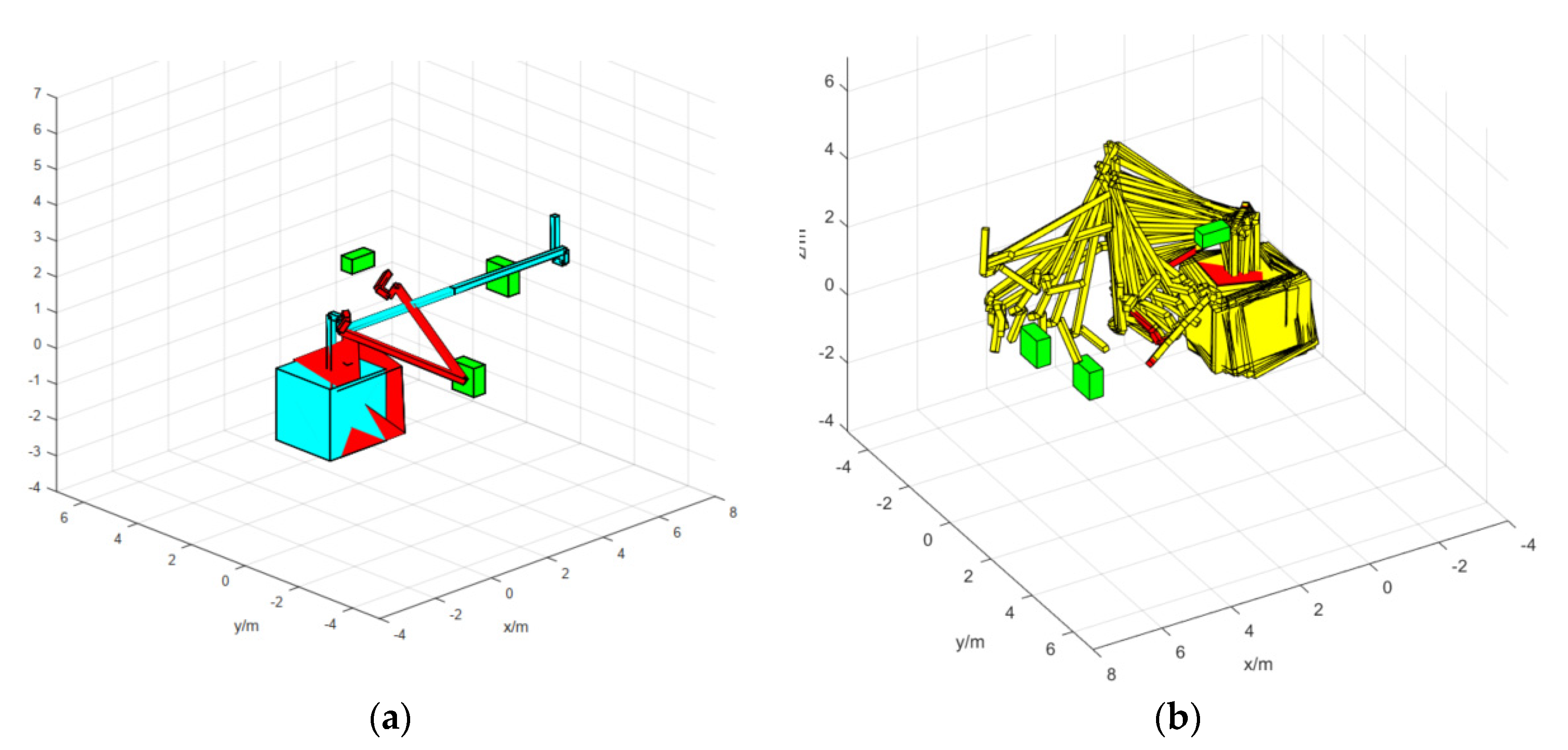
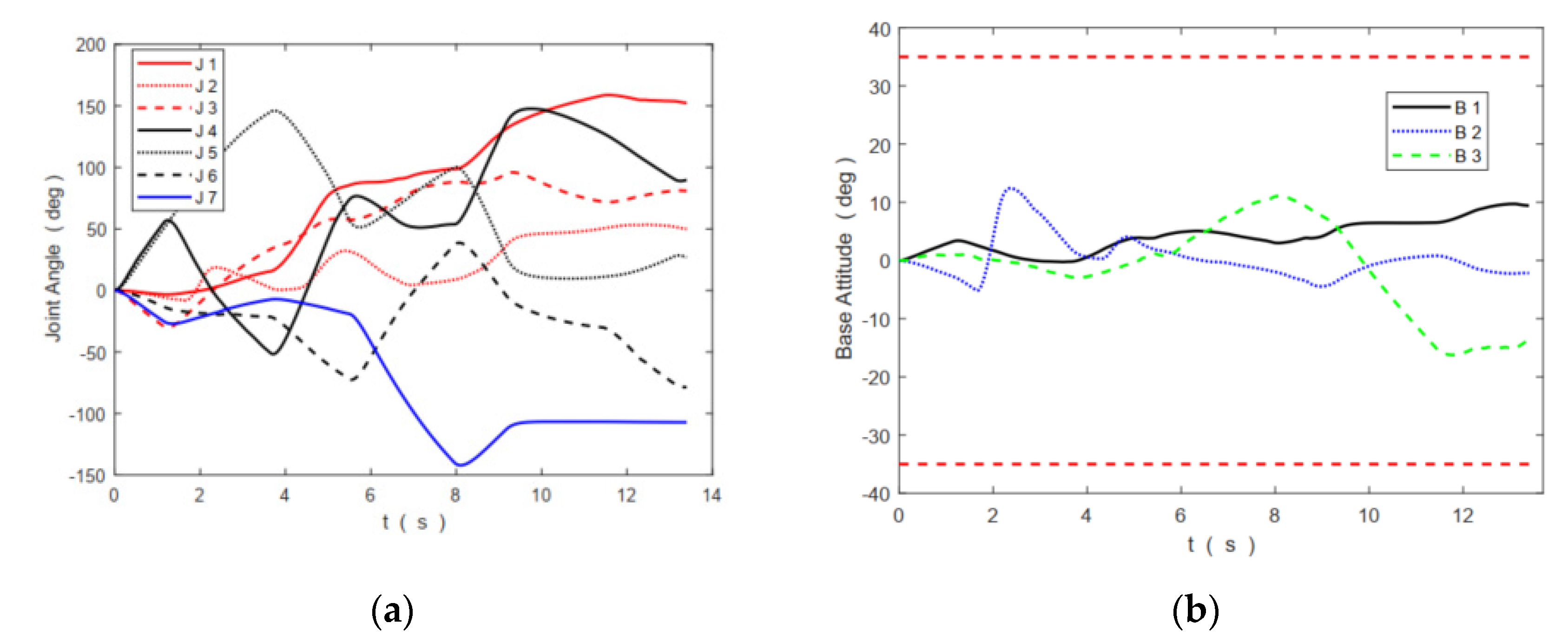
4.2.1. Simulation Results of Scenario 1
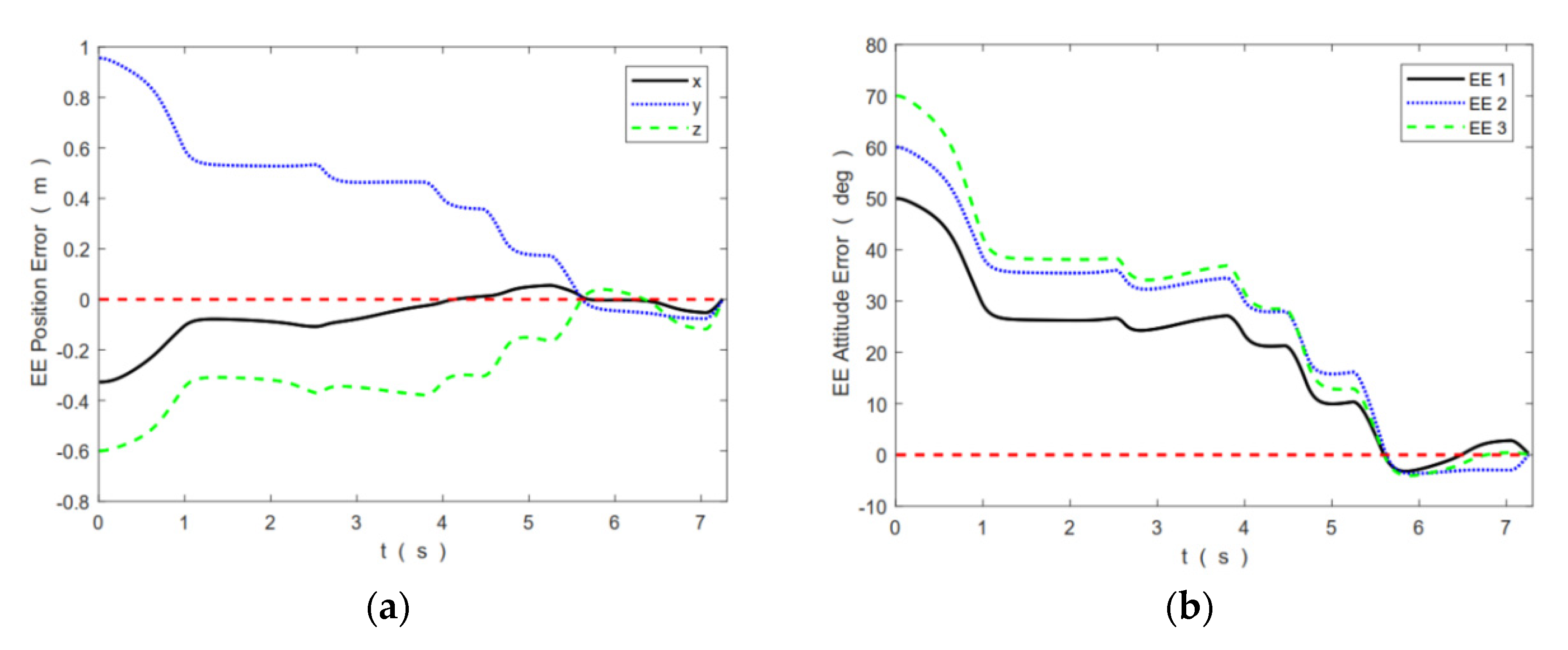
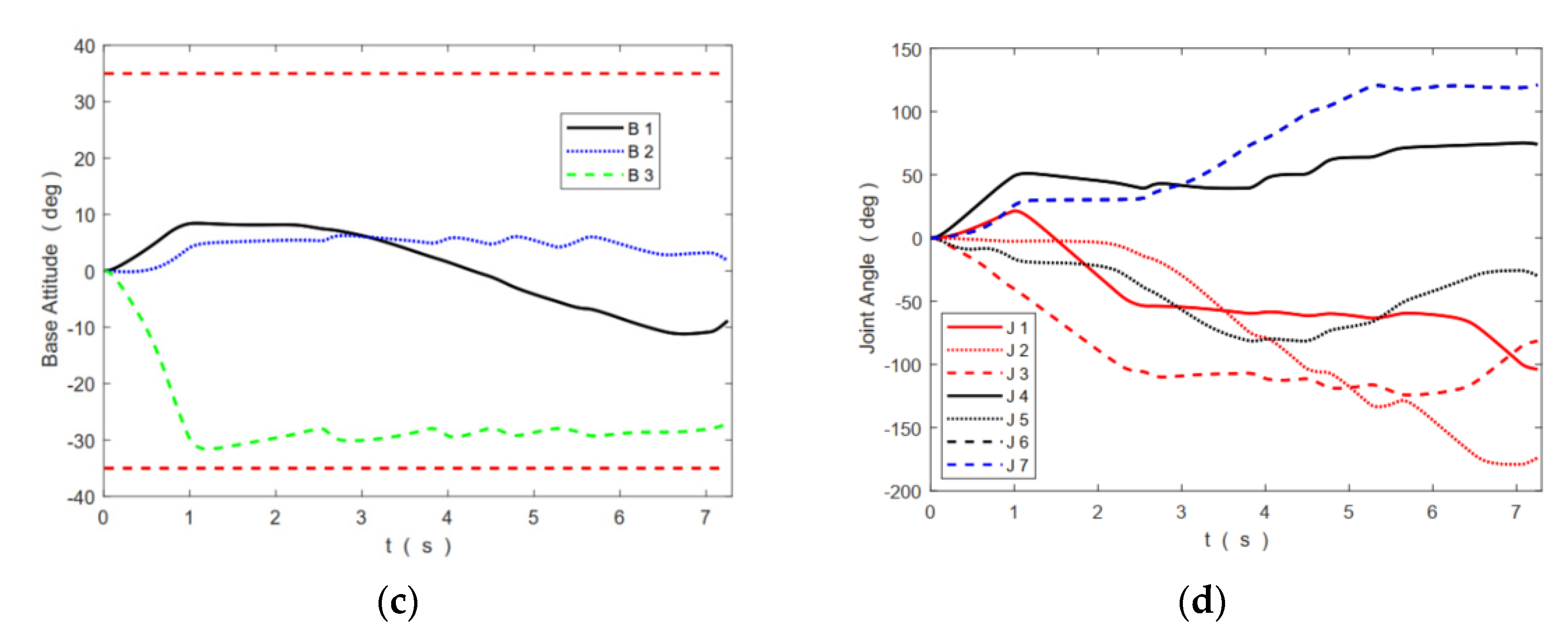
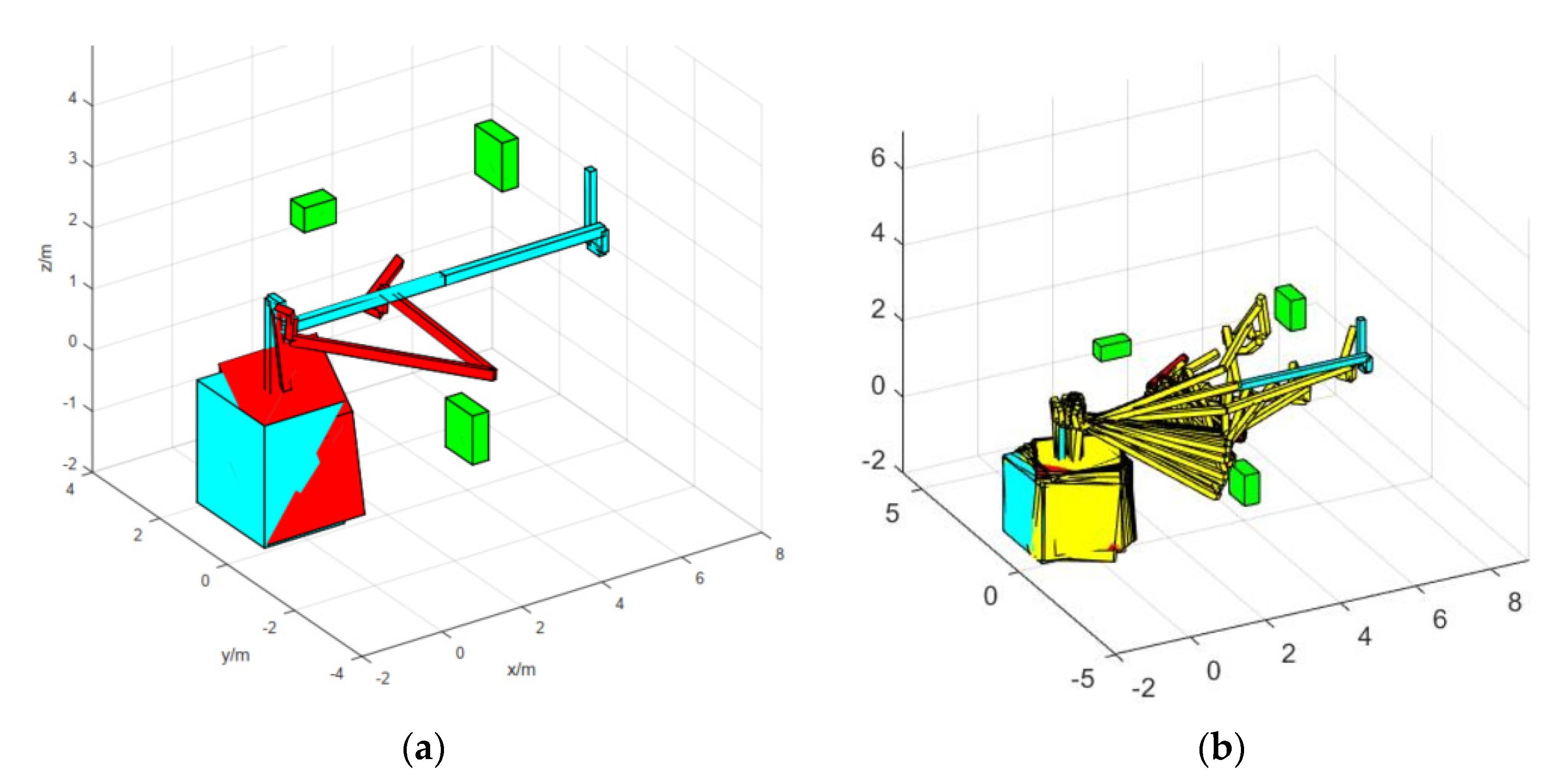
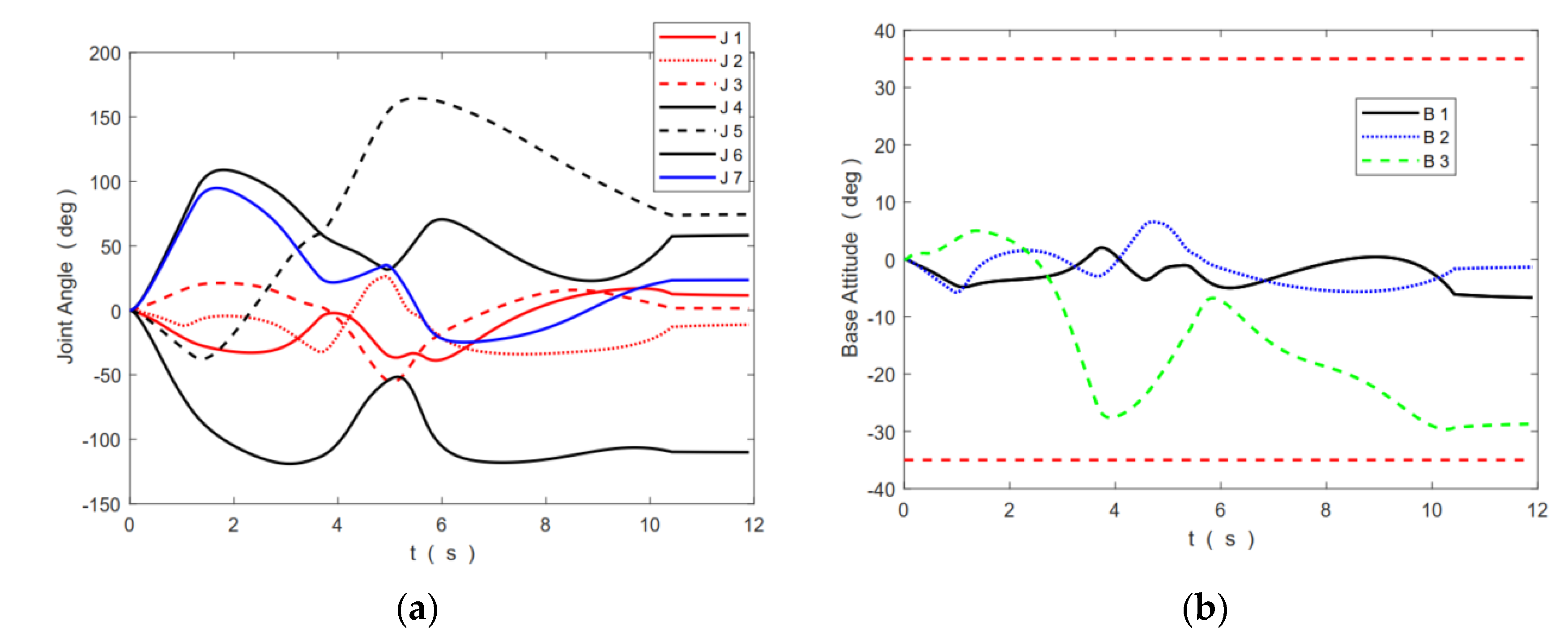
4.2.2. Simulation Results of Scenario 2
5. Conclusions
- A control-based local planner for random configuration guiding growth of the tree. This planner uses the configuration error as a reference to select actions. It can achieve rapid local planning while taking into account the disturbance of the base.
- A control-based local planner for goal EE pose guiding growth of the tree. This local planner can adjust the attitude of the base when necessary. This planner mainly uses the EE pose error as a reference to select actions. Moreover, a reference goal base attitude and an error threshold for the base are introduced as a trigger for base attitude adjustment. The local planner based on this mechanism can make the base attitude disturbance meet the limit while avoiding singularity as much as possible.
- Finally, for collision detection, this paper proposes a method for calculating the position of the mass center of each rigid body of FFSRs in a certain configuration.
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| FFSR | Free-floating space robots |
| RRT | Rapidly exploring random tree |
| EE | End-effector |
| VM | Virtual manipulator |
| DM | Disturbance map |
| DOF | Degrees-of-freedom |
| ABDK | An approach based on the direct kinematics |
| OPMP | Optimization-based approach for robotic motion planning |
| CHOMP | Covariant Hamiltonian optimization for motion planning |
| STOMP | Stochastic trajectory optimization for motion planning |
| SBMP | Sampling-based motion planner |
| JT-RRTs | Jacobian transpose-directed rapidly exploring random trees |
| CB-EEPG-LP | Control-based goal EE pose guiding local planner |
| RC-GG | Random configuration guiding growth |
| GEE-GG | Goal EE pose guiding growth |
| VM | Virtual manipulator |
| DM | Disturbance map |
| RRT | Rapidly-exploring random tree |
| dof | Degree-of-freedom |
| FFSR | Free-floating space robot |
| CHOMP | Covariant hamiltonian optimization for motion planning |
| STOMP | Stochastic trajectory optimization for motion planning |
References
- Flores-Abad, A.; Ma, O.; Pham, K.; Ulrich, S. A review of space robotics technologies for on-orbit servicing. Prog. Aerosp. Sci. 2014, 68, 1–26. [Google Scholar] [CrossRef] [Green Version]
- Elbanhawi, M.; Simic, M. Sampling-based robot motion planning: A review. IEEE. Access. 2014, 2, 56–77. [Google Scholar] [CrossRef]
- Lynch, K.M.; Park, F.C. Modern Robotics; Cambridge University Press: Cambridge, UK, 2017; pp. 325–348. [Google Scholar]
- Vafa, Z.; Dubowsky, S. On the dynamics of manipulators in space using the virtual manipulator approach. In Proceedings of the IEEE International Conference on Robotics and Automation, Raleigh, NC, USA, 31 March–3 April 1987; pp. 579–585. [Google Scholar]
- Vafa, Z.; Dubowsky, S. On the dynamics of space manipulators using the virtual manipulator, with applications to path planning. In Space Robotics: Dynamics and Control; Xu, Y., Kanade, T., Eds.; Springer: Boston, MA, USA, 1993; pp. 45–76. [Google Scholar]
- Nakamura, Y.; Mukherjee, R. Non-holonomic path planning of space robots via bi-directional approach. In Proceedings of the IEEE International Conference on Robotics and Automation, Cincinnati, OH, USA, 13–18 May 1990; pp. 1764–1769. [Google Scholar]
- Fernandes, C.; Gurvits, L.; Li, Z. Near-optimal non-holonomic motion planning for a system of coupled rigid bodies. IEEE Trans. Automat. Contr. 1994, 39, 450–463. [Google Scholar] [CrossRef]
- Yamada, K. Arm path planning for a space robot. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Yokohama, Japan, 26–30 July 1993; pp. 2049–2055. [Google Scholar] [CrossRef]
- Suzuki, T.; Nakamura, Y. Planning spiral motion of non-holonomic space robots. In Proceedings of the IEEE International Conference on Robotics and Automation, Minneapolis, MN, USA, 22–28 April 1996; pp. 718–725. [Google Scholar]
- Lampariello, R. Motion Planning for the On-orbit Grasping of a Non-cooperative Target Satellite with Collision Avoidance. In Proceedings of the 10th International symposium on Artificial Intelligence, Robotics and Automation in Space, Sapporo, Japan, 29 August–1 September 2010. [Google Scholar]
- Schulman, J.; Duan, Y.; Ho, J.; Lee, A.; Awwal, I.; Bradlow, H.; Pan, J.; Patil, S.; Goldberg, K.; Abbeel, P. Motion planning with sequential convex optimization and convex collision checking. Int. J. Robot. Res. 2014, 33, 1251–1270. [Google Scholar] [CrossRef] [Green Version]
- Zucker, M.; Ratliff, N.; Dragan, A.D.; Pivtoraiko, M.; Klingensmith, M.; Dellin, C.M.; Bagnell, J.A.; Srinivasa, S.S. Chomp: Covariant hamiltonian optimization for motion planning. Int. J. Robot. Res. 2013, 32, 1164–1193. [Google Scholar] [CrossRef] [Green Version]
- Kalakrishnan, M.; Chitta, S.; Theodorou, E.; Pastor, P.; Schaal, S. STOMP: Stochastic trajectory optimization for motion planning. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 4569–4574. [Google Scholar]
- Misra, G.; Bai, X. Task-constrained trajectory planning of free-floating space-robotic systems using convex optimization. J. Guid. Control. Dyn. 2017, 40, 2857–2870. [Google Scholar] [CrossRef]
- Virgili-Llop, J.; Zagaris, C.; Zappulla, R.; Bradstreet, A.; Romano, M. A convex-programming-based guidance algorithm to capture a tumbling object on orbit using a spacecraft equipped with a robotic manipulator. Int. J. Robot. Res. 2019, 38, 40–72. [Google Scholar] [CrossRef]
- Wang, M.; Luo, J.; Walter, U. Trajectory planning of FFSRusing Particle Swarm Optimization (PSO). Acta Astronaut. 2015, 112, 77–88. [Google Scholar] [CrossRef]
- Xu, W.; Li, C.; Wang, X.; Liu, Y.; Liang, B.; Xu, Y. Study on non-holonomic cartesian path planning of a free-floating space robotic system. Adv. Robot. 2009, 23, 113–143. [Google Scholar] [CrossRef]
- Wang, M.; Luo, J.; Fang, J.; Yuan, J. Optimal trajectory planning of free-floating space manipulator using differential evolution algorithm. Adv. Space Res. 2018, 61, 1525–1536. [Google Scholar] [CrossRef]
- Bertram, D.; Kuffner, J.; Dillmann, R.; Asfour, T. An integrated approach to inverse kinematics and path planning for redundant manipulators. In Proceedings of the IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; pp. 1874–1879. [Google Scholar]
- Weghe, M.V.; Ferguson, D.; Srinivasa, S.S. Randomized path planning for redundant manipulators without inverse kinematics. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots, Pittsburgh, PA, USA, 29 November–1 December 2007; pp. 477–482. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1 | Tree | Tree data structure generated by the algorithm |
| 2 | V | Vertex of the tree |
| 3 | rand() | A function that generates a real number between 0~1 |
| 4 | q_new | New vertex (configuration) generated by the local planner |
| 5 | Local_Traj | Local trajectory generated by the local planner |
| 6 | is_Reaching_Goal | A mark indicating whether the goal has been achieved |
| 7 | Is_Extend | A mark indicating whether the local planner is successful |
| 8 | Tree.Add | A function that adds the generated new node and local trajectory to the tree |
| 9 | Tree.V.init(q_I) | Initialize the tree |
| 10 | Break | Jump out of the loop |
| 1 | q_Sample | A randomly sampled configuration |
| 2 | Random_Config() | A function that can generate a random configuration |
| q_Near | Nearest node in the tree with respect to q_Sample | |
| q_Present | The current configuration in local planning | |
| 3 | Last_Checked_Config | Last detected free configuration |
| 4 | J_Base | The Jacobian matrix related to base attitude |
| 5 | Jacobian_Base() | A function which calculates J_Base |
| 6 | J_x | Jacobian matrix related to state transition |
| 7 | Dot_Joint/Dot_Base | First derivative of joint angle/base attitude angle |
| 8 | Collision_Check_Tresh_Hold | A threshold that indicates the need for collision detection |
| 9 | Collision_Check() | A function that used for doing collision checking |
| 10 | is_q_Present_over_Tresh_Hold | A mark indicating whether the q_Present meets the limit |
| 11 | is_Extend_over_Tresh_hold | A mark indicating whether the extension is far enough from the node to be extended |
| 1 | X_Goal | Goal EE pose |
| 2 | General_J | Generalized Jacobian matrix |
| 3 | General_Jacobian() | A function that is used for calculating General_J |
| 4 | f_EE() | A function that is used for calculating EE pose |
| 5 | Delta_X | The error between the goal EE pose and the EE pose at q_Present |
| 6 | q_Goal_Base | The reference goal base attitude |
| 7 | Delta_q_Base | The error between q _Goal_Base and q_Present_Base |
| 8 | q_Present_Base | The current base attitude in local planning |
| 9 | Dot_Joint_For_EE | Joint velocity that can reduce the EE pose error |
| 10 | Base_Adjust_Tresh_Hold | The base attitude error threshold that indicates the need for base adjust |
| 11 | Dot_Joint_For_Base_Adjust | Joint velocity that can reduce the base attitude error |
| 12 | Null | A function that can calculate the null-space of a matric |
| Rigid Body No. | Mass/kg | Length/Width/Height (m) | Ixx (kg.m2) | Iyy (kg.m2) | Izz (kg.m2) |
|---|---|---|---|---|---|
| 0 | 900 | 1/1/1 | 6000 | 12,000 | 8000 |
| 1 | 20 | 0.35/0.16/0.16 | 20 | 20 | 30 |
| 2 | 20 | 0.35/0.16/0.16 | 20 | 20 | 30 |
| 3 | 40 | 4/0.16/0.16 | 1 | 40 | 40 |
| 4 | 40 | 4/0.16/0.16 | 1 | 40 | 40 |
| 5 | 20 | 0.35/0.16/0.16 | 20 | 20 | 30 |
| 6 | 20 | 0.35/0.16/0.16 | 20 | 20 | 30 |
| 7 | 40 | 1.2/0.16/0.16 | 10 | 8 | 4 |
| i | ||||
|---|---|---|---|---|
| 1 | 0 | 0 | 2.5 | 600 |
| 2 | 0 | 90 | 0.35 | 20 |
| 3 | 0 | 90 | 0.35 | 20 |
| 4 | 4 | 0 | 0 | 40 |
| 5 | 4 | 0 | 0.35 | 40 |
| 6 | 0 | 90 | 0.35 | 20 |
| 7 | 0 | 90 | 1.2 | 20 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Zhu, Z. Sampling-Based Motion Planning for Free-Floating Space Robot without Inverse Kinematics. Appl. Sci. 2020, 10, 9137. https://doi.org/10.3390/app10249137
Zhang H, Zhu Z. Sampling-Based Motion Planning for Free-Floating Space Robot without Inverse Kinematics. Applied Sciences. 2020; 10(24):9137. https://doi.org/10.3390/app10249137
Chicago/Turabian StyleZhang, Hongwen, and Zhanxia Zhu. 2020. "Sampling-Based Motion Planning for Free-Floating Space Robot without Inverse Kinematics" Applied Sciences 10, no. 24: 9137. https://doi.org/10.3390/app10249137