
Adaptive Neural Control of a 2DOF Helicopter with Input Saturation and Time-Varying Output Constraint

Abstract
:1. Introduction
- (i)
- The time-varying output of the system is solved using TVBLF to keep the system output within a time-varying region.
- (ii)
- (iii)
- In the simulation results, the superiority of the control strategy proposed in this study is demonstrated based on the comparison results of multiple sets of simulations.
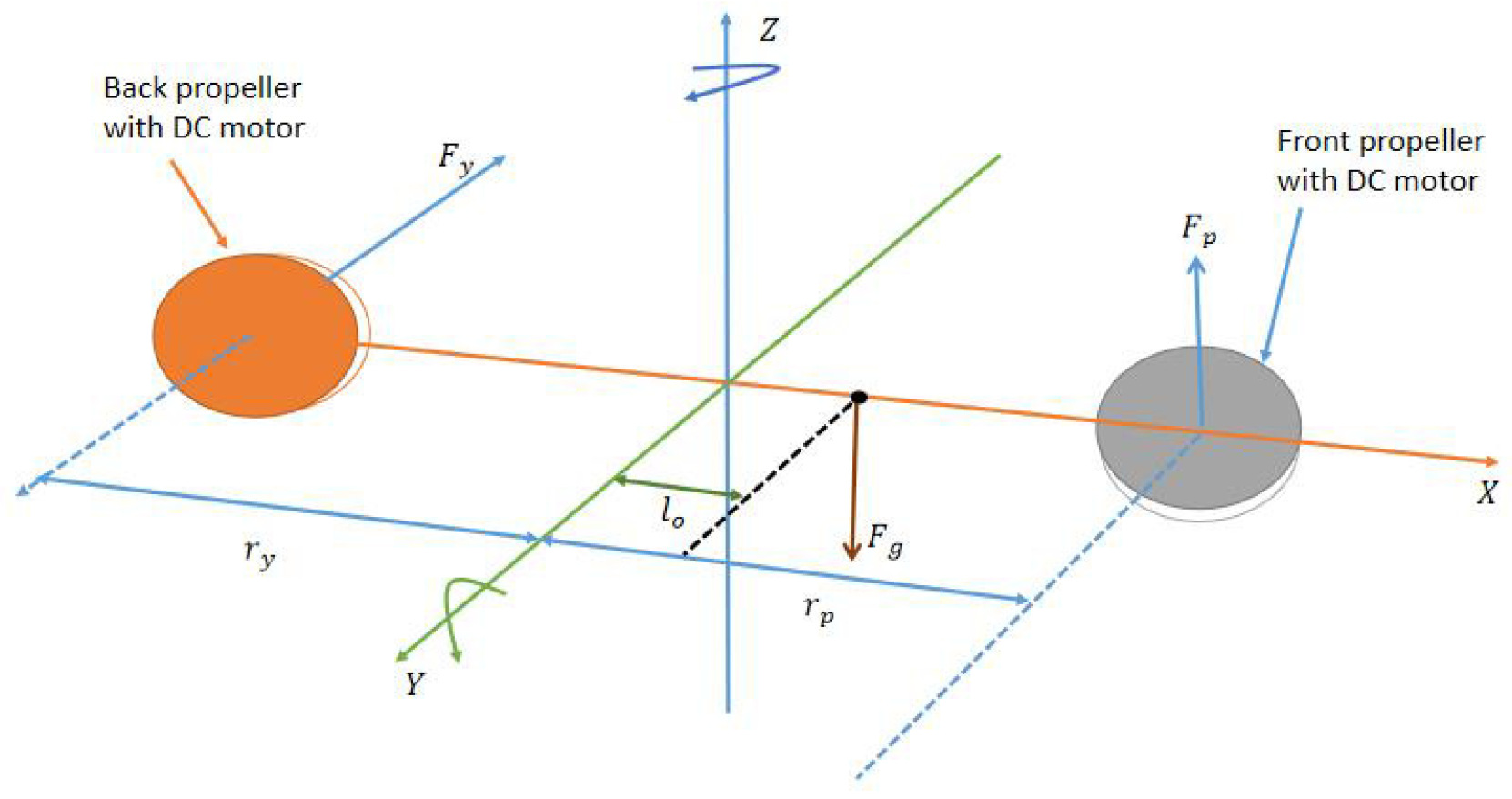
2. Problem Formulation and Preliminaries
2.1. Problem Formulation
2.2. Preliminaries
3. Controller Design and Stability Analysis
4. Simulation
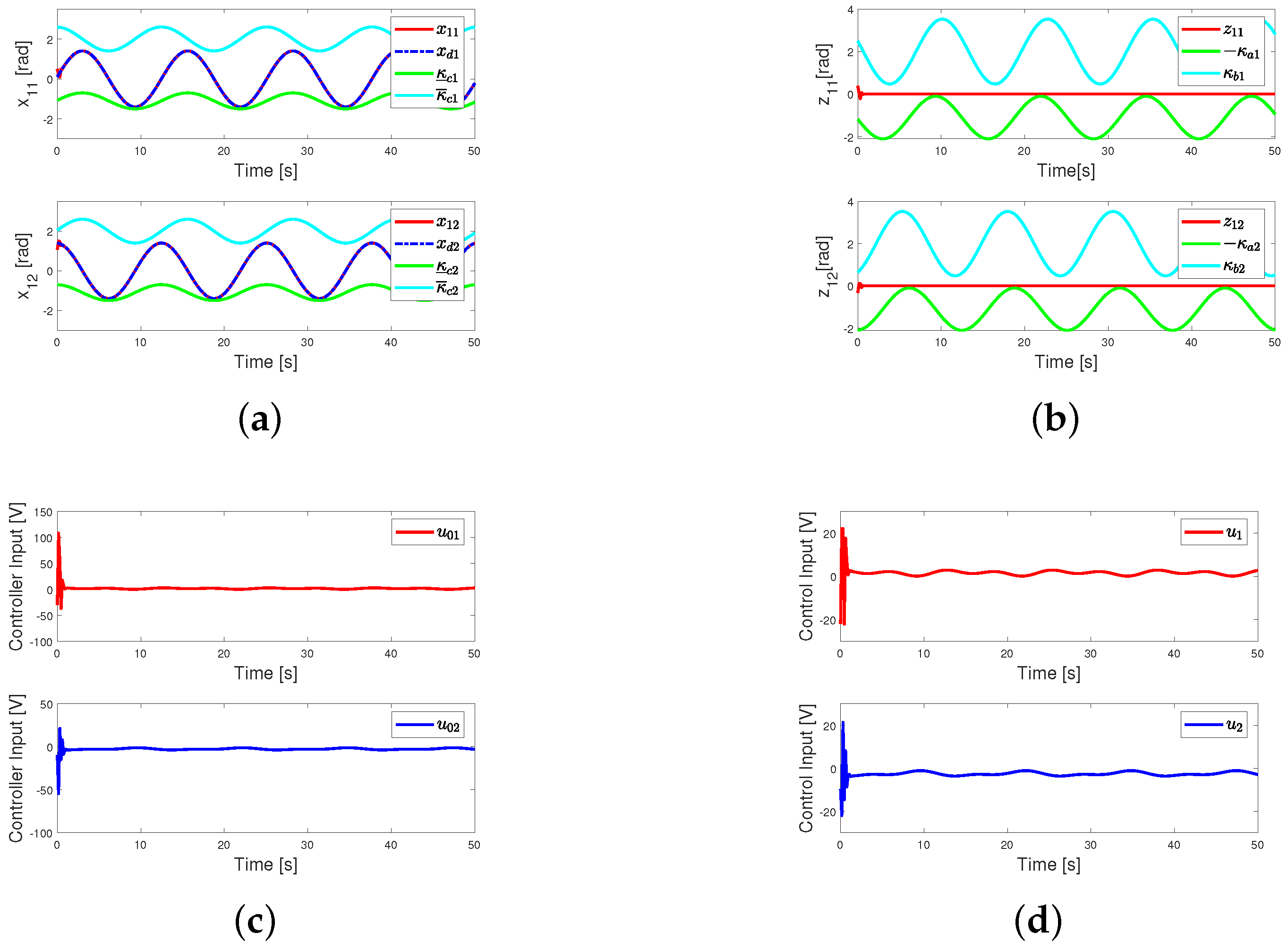
4.1. Case 1: Under the Proposed Control
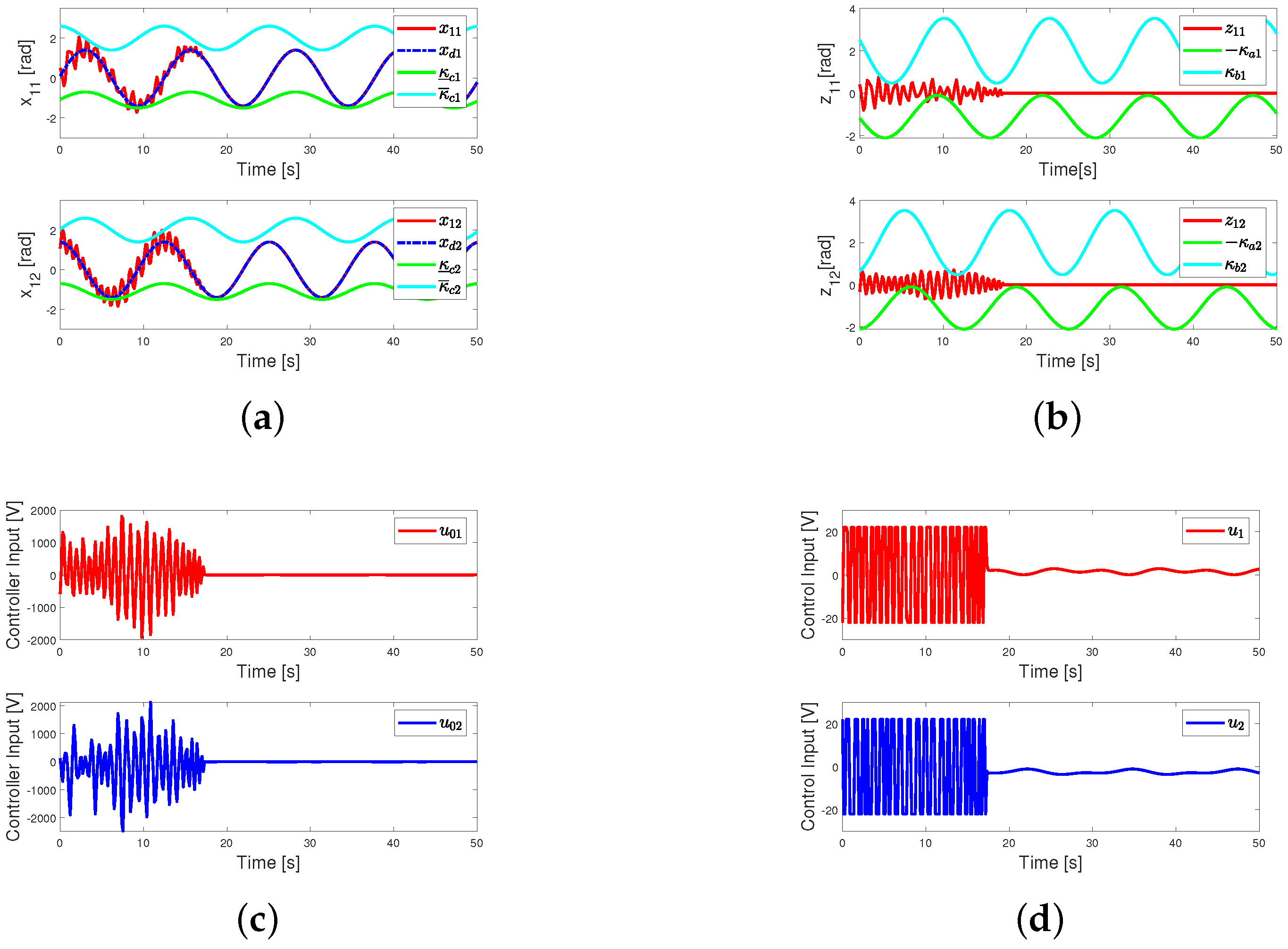
4.2. Case 2: Under the Proposed Control without Time-Varying Output Constraint
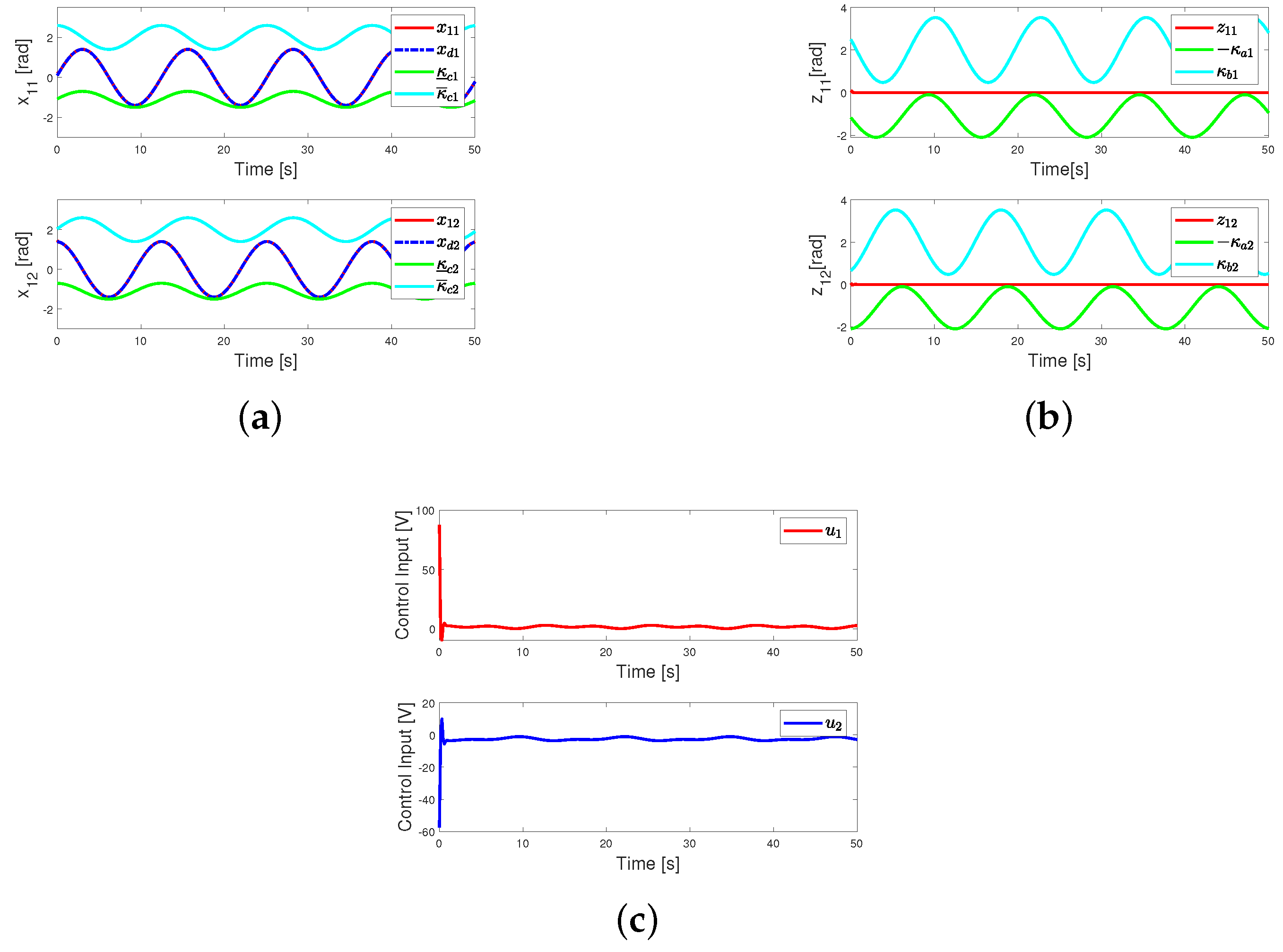
4.3. Case 3: Under the Proposed Control without Input Saturation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Luo, B.; Wu, H.N.; Huang, T. Optimal Output Regulation for Model-Free Quanser Helicopter with Multistep Q-Learning. IEEE Trans. Ind. Electron. 2018, 65, 4953–4961. [Google Scholar] [CrossRef]
- Kim, S.K.; Ahn, C.K. Performance-Boosting Attitude Control for 2DOF Helicopter Applications via Surface Stabilization Approach. IEEE Trans. Ind. Electron. 2022, 69, 7234–7243. [Google Scholar] [CrossRef]
- Kim, S.K.; Kim, K.S.; Ahn, C.K. Order Reduction Approach to Velocity Sensorless Performance Recovery PD-Type Attitude Stabilizer for 2DOF Helicopter Applications. IEEE Trans. Ind. Informatics 2022, 18, 6848–6856. [Google Scholar] [CrossRef]
- Zhao, Z.; He, W.; Mu, C.; Zou, T.; Hong, K.S.; Li, H.X. Reinforcement Learning Control for a 2DOF Helicopter with State Constraints: Theory and Experiments. IEEE Trans. Autom. Sci. Eng. 2022, 1–11. [Google Scholar] [CrossRef]
- Chen, M.; Shi, P.; Lim, C.C. Adaptive Neural Fault-Tolerant Control of a 3-DOF Model Helicopter System. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 260–270. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Groß, R.; Zhao, S. Aerobatic Tic-Toc Control of Planar Quadcopters via Reinforcement Learning. IEEE Robot. Autom. Lett. 2022, 7, 2140–2147. [Google Scholar] [CrossRef]
- Moreno-Valenzuela, J.; Pérez-Alcocer, R.; Guerrero-Medina, M.; Dzul, A. Nonlinear PID-Type Controller for Quadrotor Trajectory Tracking. IEEE/ASME Trans. Mechatron. 2018, 23, 2436–2447. [Google Scholar] [CrossRef]
- Yu, L.; He, G.; Wang, X.; Zhao, S. Robust Fixed-Time Sliding Mode Attitude Control of Tilt Trirotor UAV in Helicopter Mode. IEEE Trans. Ind. Electron. 2022, 69, 10322–10332. [Google Scholar] [CrossRef]
- Rodriguez Castellanos, J.E.; Cote Ballesteros, J.E. Implementation of a Direct Fuzzy Controller Applied to a Helicopter with one Degree of Freedom. IEEE Lat. Am. Trans. 2019, 17, 1808–1814. [Google Scholar] [CrossRef]
- Liu, Z.; He, X.; Zhao, Z.; Ahn, C.K.; Li, H.X. Vibration Control for Spatial Aerial Refueling Hoses with Bounded Actuators. IEEE Trans. Ind. Electron. 2021, 68, 4209–4217. [Google Scholar] [CrossRef]
- Yang, G.; Zhu, T.; Yang, F.; Cui, L.; Wang, H. Output feedback adaptive RISE control for uncertain nonlinear systems. Asian J. Control 2022, in press. [Google Scholar] [CrossRef]
- Yang, G.; Yao, J.; Le, G.; Ma, D. Adaptive integral robust control of hydraulic systems with asymptotic tracking. Mechatronics 2016, 40, 78–86. [Google Scholar] [CrossRef]
- Zhao, Z.; Ren, Y.; Mu, C.; Zou, T.; Hong, K.S. Adaptive Neural-Network-Based Fault-Tolerant Control for a Flexible String with Composite Disturbance Observer and Input Constraints. IEEE Trans. Cybern. 2021, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S.; Yang, P.; Kong, L.; Chen, W.; Fu, Q.; Peng, K. Neural Networks-Based Fault Tolerant Control of a Robot via Fast Terminal Sliding Mode. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 4091–4101. [Google Scholar] [CrossRef]
- Zhao, Z.; He, W.; Zhang, F.; Wang, C.; Hong, K.S. Deterministic Learning from Adaptive Neural Network Control for a 2DOF Helicopter System With Unknown Backlash and Model Uncertainty. IEEE Trans. Ind. Electron. 2022, 1–10, in press. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, F.; Mei, Y.; Wan, W. Adaptive Neural Network Vibration Control for an Output-Tension-Constrained Axially Moving Belt System with Input Nonlinearity. IEEE/ASME Trans. Mechatron. 2022, 27, 656–665. [Google Scholar] [CrossRef]
- Yang, G.; Yao, J. Multilayer neuroadaptive force control of electro-hydraulic load simulators with uncertainty rejection. Appl. Soft Comput. 2022, 130, 109672. [Google Scholar] [CrossRef]
- Zou, T.; Wu, H.; Sun, W.; Zhao, Z. Adaptive neural network sliding mode control of a nonlinear two-degrees-of-freedom helicopter system. Asian J. Control 2022, in press. [Google Scholar] [CrossRef]
- Cao, L.; Zhang, J.; Liu, S.; Zhao, Z. Adaptive neural fault-tolerant control of an uncertain 2DOF helicopter system with actuator faults and output error constrains. IET Control Theory Appl. 2022, in press. [Google Scholar] [CrossRef]
- Yu, X.; He, W.; Li, H.; Sun, J. Adaptive Fuzzy Full-State and Output-Feedback Control for Uncertain Robots with Output Constraint. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 6994–7007. [Google Scholar] [CrossRef]
- Zhang, Z.; Wu, Y. Adaptive Fuzzy Tracking Control of Autonomous Underwater Vehicles With Output Constraints. IEEE Trans. Fuzzy Syst. 2021, 29, 1311–1319. [Google Scholar] [CrossRef]
- Fang, L.; Ding, S.; Park, J.H.; Ma, L. Adaptive Fuzzy Output-Feedback Control Design for a Class of p-Norm Stochastic Nonlinear Systems With Output Constraints. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 2626–2638. [Google Scholar] [CrossRef]
- Zhao, Z.; He, W.; Yang, J.; Li, Z. Adaptive neural network control of an uncertain 2DOF helicopter system with input backlash and output constraints. Neural Comput. Appl. 2022, 34, 18143–18154. [Google Scholar] [CrossRef]
- Zhao, Z.; Zhang, J.; Liu, Z.; Mu, C.; Hong, K.S. Adaptive Neural Network Control of an Uncertain 2-DOF Helicopter with Unknown Backlash-Like Hysteresis and Output Constraints. IEEE Trans. Neural Netw. Learn. Syst. 2022, 34, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Li, D.; Wang, D.; Liu, L.; Gao, Y. Adaptive Finite-Time Tracking Control for Continuous Stirred Tank Reactor with Time-Varying Output Constraint. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 5929–5934. [Google Scholar] [CrossRef]
- Zhao, Z.; Liu, Y.; Zou, T.; Hong, K.S.; Li, H.X. Robust Adaptive Fault-Tolerant Control for a Riser-Vessel System with Input Hysteresis and Time-Varying Output Constraints. IEEE Trans. Cybern. 2022, 1–12. [Google Scholar] [CrossRef]
- Yang, G.; Yao, J.; Dong, Z. Neuroadaptive learning algorithm for constrained nonlinear systems with disturbance rejection. Int. J. Robust Nonlinear Control 2022, in press. [Google Scholar] [CrossRef]
- Hu, Y.; Yan, H.; Zhang, H.; Wang, M.; Zeng, L. Robust Adaptive Fixed-Time Sliding-Mode Control for Uncertain Robotic Systems with Input Saturation. IEEE TRansactions Cybern. 2022, 1–11. [Google Scholar] [CrossRef]
- Zhang, J.; Yang, Y.; Zhao, Z.; Hong, K.S. Adaptive Neural Network Control of a 2DOF Helicopter System with Input Saturation. Int. J. Control Autom. Syst. 2022, 1–10, in press. [Google Scholar]
- Yu, J.; Shi, P.; Lin, C.; Yu, H. Adaptive Neural Command Filtering Control for Nonlinear MIMO Systems With Saturation Input and Unknown Control Direction. IEEE Trans. Cybern. 2020, 50, 2536–2545. [Google Scholar] [CrossRef]
- Zhu, B.; Chen, M.; Li, T. Prescribed performance–based tracking control for quadrotor UAV under input delays and input saturations. Trans. Inst. Meas. Control 2022, 44, 2049–2062. [Google Scholar] [CrossRef]
- Shao, S.; Chen, M.; Hou, J.; Zhao, Q. Event-Triggered-Based Discrete-Time Neural Control for a Quadrotor UAV Using Disturbance Observer. IEEE/ASME Trans. Mechatron. 2021, 26, 689–699. [Google Scholar] [CrossRef]
- Chen, M.; Yan, K.; Wu, Q. Multiapproximator-Based Fault-Tolerant Tracking Control for Unmanned Autonomous Helicopter with Input Saturation. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 5710–5722. [Google Scholar] [CrossRef]
- Liu, K.; Wang, R. Antisaturation Command Filtered Backstepping Control-Based Disturbance Rejection for a Quadarotor UAV. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 3577–3581. [Google Scholar] [CrossRef]
- Kim, B.M.; Yoo, S.J. Approximation-Based Quantized State Feedback Tracking of Uncertain Input-Saturated MIMO Nonlinear Systems with Application to 2DOF Helicopter. Mathematics 2021, 9, 1062. [Google Scholar] [CrossRef]
- Quanser inc. Quanser AERO Laboratory Guide; Technical Report; Quanser: Markham, ON, Canada, 2016. [Google Scholar]
- Chen, Z.; Li, Z.; Chen, C.L.P. Adaptive Neural Control of Uncertain MIMO Nonlinear Systems With State and Input Constraints. IEEE Trans. Neural Netw. Learn. Syst. 2017, 28, 1318–1330. [Google Scholar] [CrossRef]
- Chen, M.; Tao, G. Adaptive Fault-Tolerant Control of Uncertain Nonlinear Large-Scale Systems with Unknown Dead Zone. IEEE Trans. Cybern. 2016, 46, 1851–1862. [Google Scholar] [CrossRef]
- Cao, S.; Sun, L.; Jiang, J.; Zuo, Z. Reinforcement Learning-Based Fixed-Time Trajectory Tracking Control for Uncertain Robotic Manipulators with Input Saturation. IEEE Trans. Neural Netw. Learn. Syst. 2021, 1–12. [Google Scholar] [CrossRef]
- Lu, S.M.; Li, D.P.; Liu, Y.J. Adaptive Neural Network Control for Uncertain Time-Varying State Constrained Robotics Systems. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 2511–2518. [Google Scholar] [CrossRef]
- Ren, Y.; Zhao, Z.; Zhang, C.; Yang, Q.; Hong, K.S. Adaptive Neural-Network Boundary Control for a Flexible Manipulator with Input Constraints and Model Uncertainties. IEEE Trans. Cybern. 2021, 51, 4796–4807. [Google Scholar] [CrossRef]
- Ren, Y.; Zhu, P.; Zhao, Z.; Yang, J.; Zou, T. Adaptive Fault-Tolerant Boundary Control for a Flexible String With Unknown Dead Zone and Actuator Fault. IEEE Trans. Cybern. 2022, 52, 7084–7093. [Google Scholar] [CrossRef] [PubMed]
- He, W.; Huang, H.; Ge, S.S. Adaptive Neural Network Control of a Robotic Manipulator With Time-Varying Output Constraints. IEEE Trans. Cybern. 2017, 47, 3136–3147. [Google Scholar] [CrossRef]
- Zhu, Q. Complete model-free sliding mode control (CMFSMC). Sci. Rep. 2021, 11, 1–15. [Google Scholar] [CrossRef] [PubMed]
- Ebrahimi, N.; Ozgoli, S.; Ramezani, A. Model-free sliding mode control, theory and application. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2018, 232, 1292–1301. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter | Value | Unit |
|---|---|---|---|
| Pitch axis moment of inertia | 0.0215 | kg · m2 | |
| Yaw axis moment of inertia | 0.0237 | kg · m2 | |
| Weight of the body | 1.0750 | kg | |
| Pitch axial coefficient of viscous friction | 0.0071 | N/V | |
| Yaw axial coefficient of viscous friction | 0.0220 | N/V | |
| Length from the center of mass to the fixing point of the body frame | 0.002 | m | |
| Torque thrust gain | 0.022 | N·m/V | |
| Torque thrust gain | 0.0221 | N·m/V | |
| Torque thrust gain | −0.0227 | N·m/V | |
| Torque thrust gain | 0.0022 | N·m/V | |
| Gravitational acceleration | 9.8 | m/s2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, B.; Wu, J.; Zhang, J.; Tang, G.; Zhao, Z. Adaptive Neural Control of a 2DOF Helicopter with Input Saturation and Time-Varying Output Constraint. Actuators 2022, 11, 336. https://doi.org/10.3390/act11110336
Wu B, Wu J, Zhang J, Tang G, Zhao Z. Adaptive Neural Control of a 2DOF Helicopter with Input Saturation and Time-Varying Output Constraint. Actuators. 2022; 11(11):336. https://doi.org/10.3390/act11110336
Chicago/Turabian StyleWu, Bing, Jiale Wu, Jian Zhang, Guojian Tang, and Zhijia Zhao. 2022. "Adaptive Neural Control of a 2DOF Helicopter with Input Saturation and Time-Varying Output Constraint" Actuators 11, no. 11: 336. https://doi.org/10.3390/act11110336