
Research on One-to-Two Internal Resonance of Sling and Beam of Suspension Sling–Beam System
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. System Model
- (1)
- The material nonlinearity of the combination structure was not considered;
- (2)
- Only the flexural rigidity of beam was considered, and the torsional stiffness and shear stiffness of beam were excluded;
- (3)
- The longitudinal vibrations of the cable and the beam were ignored, and only the longitudinal elongation of the cable due to the transverse motion of the beam was considered;
- (4)
- The deadweight of the sling was not considered;
- (5)
- The sling maintained linear elasticity during vibration.
3. Approximate Analysis
3.1. Free Vibration
3.2. The Excitation on the Sling
3.3. The Excitation on the Beam
4. Numerical Results and Discussion
4.1. Free Vibration
4.2. The Excitation on the Sling
4.3. The Excitation on the Beam
5. Conclusions
- (1)
- Without damping, free vibration of the combination system was periodical, stable, and bounded. The total energy of the system was constant and transferred among the sling and the beam, which had a typical characteristic of a “beat.” With damping, the total energy of the combination system was gradually dissipated. Different damping coefficients of the combination system could obtain different attenuation laws of amplitude; thus, we could adjust different damping coefficients to change the attenuation law of amplitudes of the combination system.
- (2)
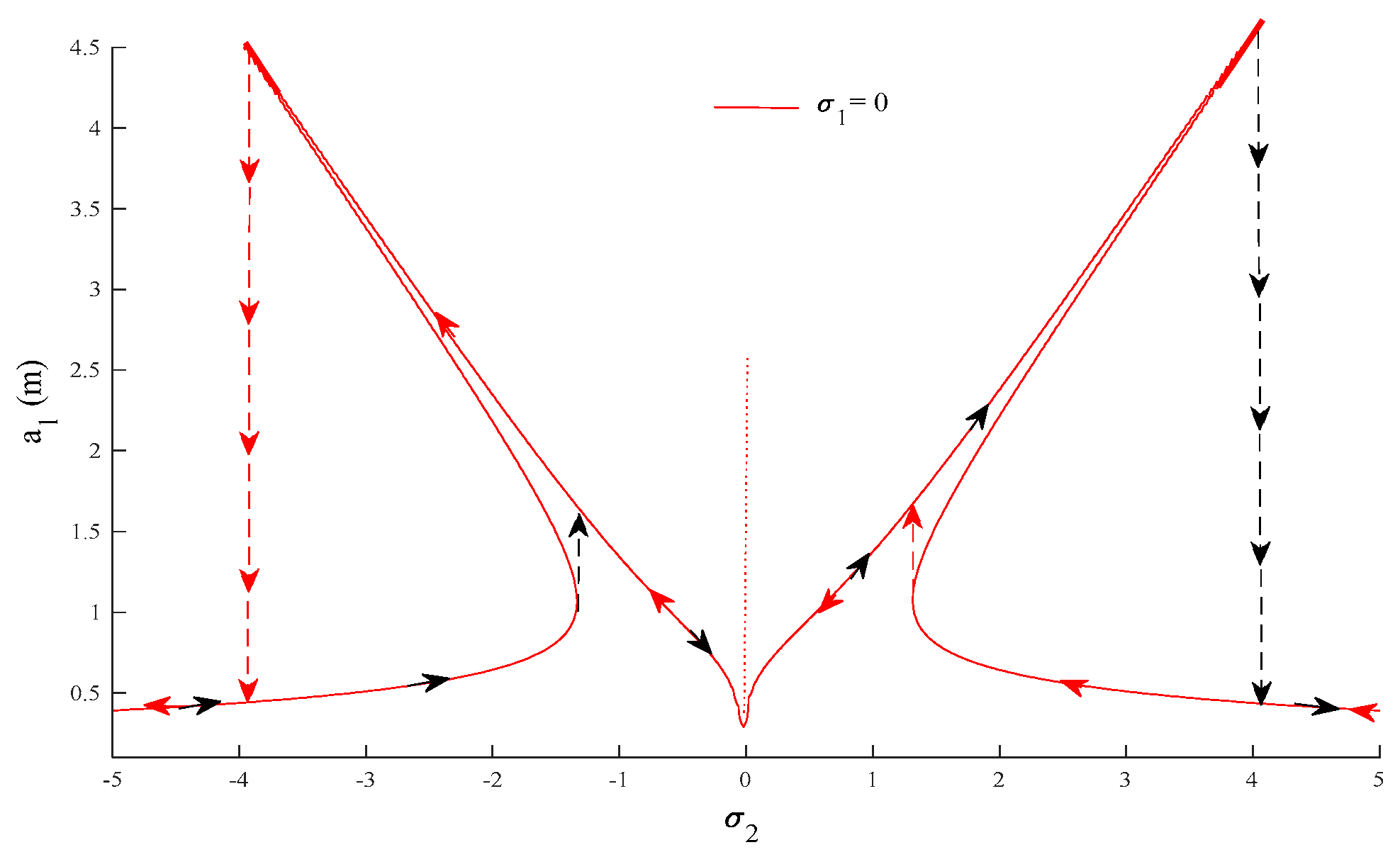
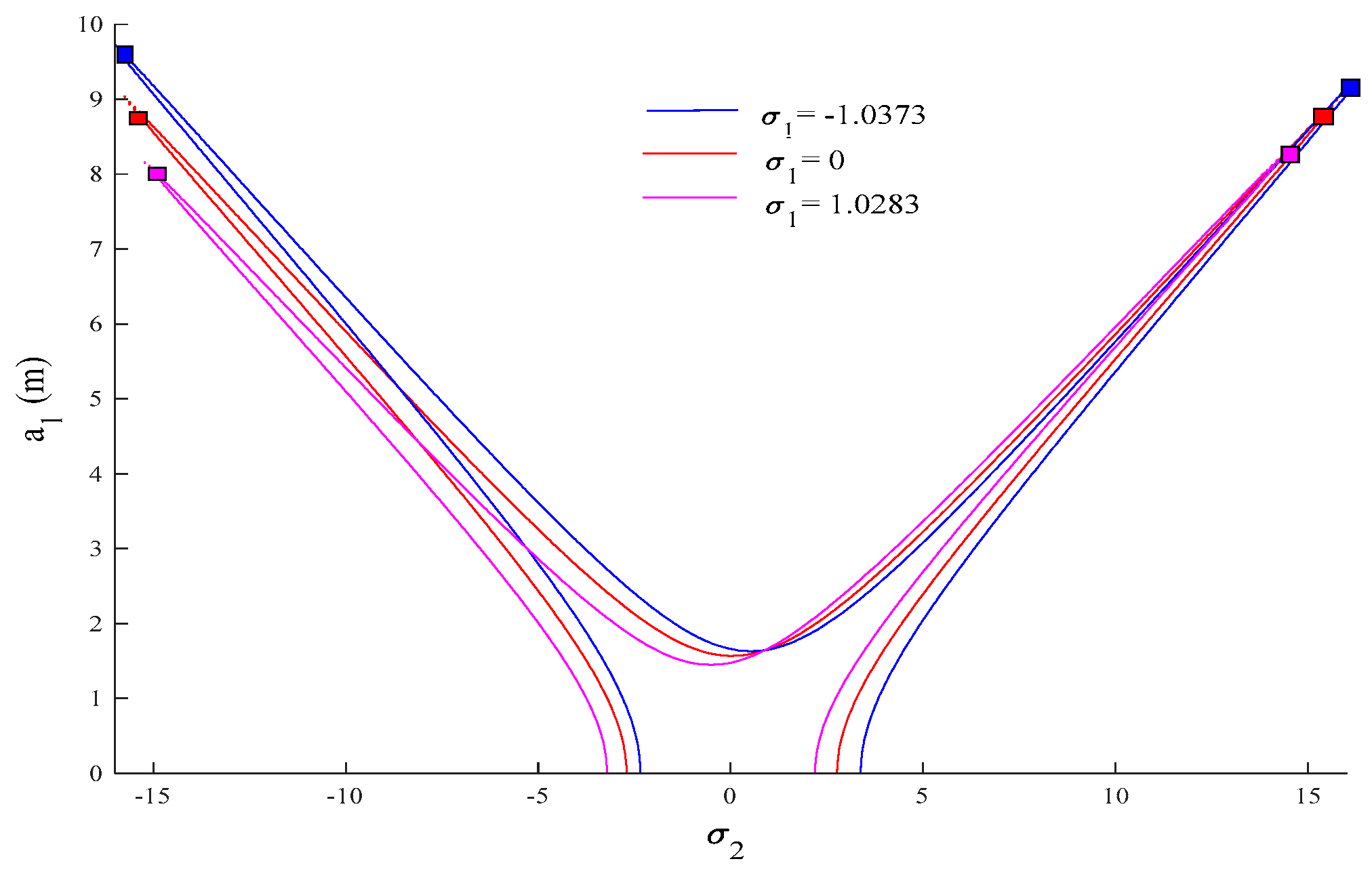
- In forced oscillation, no matter the excitation forcing the sling or the beam, the amplitude–frequency response of the cable had an obvious jumping phenomenon. The amplitude–frequency response of the beam had a jumping phenomenon only when the excitation forced the sling. On the right side of the baseline, the responses of the sling and the beam both exhibited hardening behavior, while on the left side, they exhibited softening behavior. In the case of σ1 = 0, the amplitude–frequency response curve was symmetrical along the baseline. When σ1 > 0 and σ1 < 0, the baseline slightly shifted to right and left, respectively, and the amplitude–frequency response curve was no longer symmetrical.
- (3)
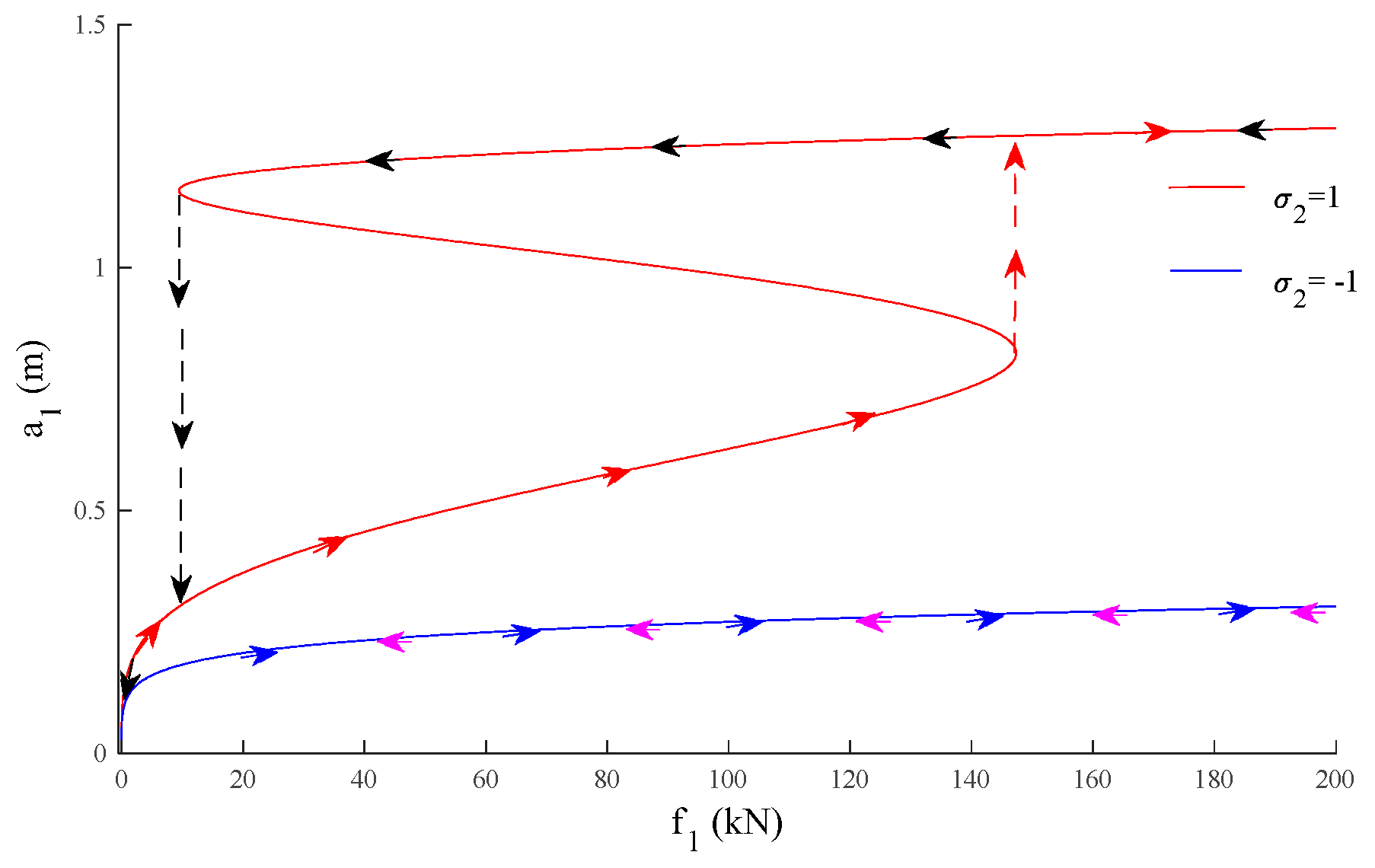
- In forced oscillation, no matter the excitation forcing the sling or the beam, the amplitude–force response of the cable had an obvious jumping phenomenon. The amplitude–force response of the beam had a jumping phenomenon only when the excitation forced the sling. When the excitation forced the beam, the amplitude of the beam was independent of the excitation, which revealed that the saturation phenomenon existed.
- (4)
- In forced oscillation, no matter the excitation forcing the sling or the beam, the steady-state responses of the sling and the beam were not excited at the same time. When the excitation forced the sling, the sling was excited ahead of the beam, and when the excitation forced the beam, the beam was excited ahead of the sling.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Takahashi, K. Dynamic stability of cables subjected to an axial periodic load. J. Sound Vib. 1991, 144, 323–330. [Google Scholar] [CrossRef]
- Pinto da Costa, A.; Martins, J.A.C.; Branco, F.A.; Lilien, J.L. Oscillations of bridge stay cables tby periodic motions of deck and/or towers. J. Eng. Mech. 1996, 122, 613–622. [Google Scholar]
- Arafat, H.N.; Nayfeh, A.H. Non-linear responses of sus-pended cables to primary resonance excitations. J. Sound Vib. 2002, 266, 325–354. [Google Scholar] [CrossRef]
- Ni, Y.Q.; Ko, J.M.; Zheng, G. Dynamic analysis of large- diameter sagged cables taking into account flexural rigidity. J. Sound Vib. 2002, 257, 301–319. [Google Scholar] [CrossRef]
- Wu, Q.; Takahashi, T.; Okabayashi, T. Response charac-teristics of local vibrations in stay cables on an existing cable stayed bridge. J. Sound Vib. 2003, 261, 403–420. [Google Scholar] [CrossRef]
- Perkins, N.C. Modal interactions in the non-linear response of elastic cables under parametric/external excitation. Int. J. Non Linear Mech. 1992, 27, 233–250. [Google Scholar] [CrossRef]
- Lilien, J.L.; Pinto da Costa, A. Vibration amplitudes caused by parametric excitation of cable stayed structures. J. Sound Vib. 1994, 174, 69–90. [Google Scholar] [CrossRef]
- Cai, Y.; Chen, S.S. Dynamics of elastic cable under para-metric and external resonances. J. Eng. Mech. 1994, 120, 1784–1802. [Google Scholar]
- Warnitchai, P.; Fujino, Y. A non-linear dynamic model for cables and its application to a cable-structure system. J. Sound Vib. 1995, 187, 693–712. [Google Scholar] [CrossRef]
- Benedettini, F.; Rega, G. Non-linear oscillations of a four-degree-of-freedom model of a suspended cable under multiple internal resonance conditions. J. Sound Vib. 1995, 182, 773–798. [Google Scholar] [CrossRef]
- Caetano, E.; Cunha, A. Investigation of dynamic cable-deck interaction in a physical model of a cable-stayed bridge. Earthq. Eng. Struct. Dyn. 2000, 29, 499–521. [Google Scholar] [CrossRef]
- Sun, B.N.; Wang, Z.G.; Ko, J.M. Cable oscillation induced by parametric excitation in cable-stayed bridges. J. Zhejiang Univ. Sci. 2003, 4, 13–20. [Google Scholar] [CrossRef] [PubMed]
- Gattulli, V.; Morandini, M. A parametric analytical model for non-linear dynamics in cable-stayed beam. Earth Quake Eng. Struct. Dyn. 2002, 31, 1281–1300. [Google Scholar] [CrossRef]
- Gattulli, V.; Lepidi, M. Nonlinear interactions in the planar dynamics of cable-stayed beam. Int. J. Solids Struct. 2003, 40, 4729–4748. [Google Scholar] [CrossRef]
- Lenci, S.; Ruzziconi, L. Nonlinear phenomena in the single-mode dynamics of a cable-supported beam. Int. J. Bifurc. Chaos 2009, 19, 923–945. [Google Scholar] [CrossRef]
- Gattulli, V.; Lepidi, M. One-to-two global-local interaction in a cable-stayed beam observed through analytical, finite element and experimental models. Int. J. Non Linear Mech. 2005, 40, 571–588. [Google Scholar] [CrossRef]
- Amer, Y.A.; Hegazy, U. Chaotic vibration and resonance phenomenon in a parametrically excited string-beam coupled system. Mechanica 2012, 47, 969–984. [Google Scholar] [CrossRef]
- Fujino, Y.; Warnitchai, P. An experimental and analytical study of auto parametric resonance in a 3-DOF model of cable-stayed-beam. Nonlinear Dyn. 1993, 4, 111–138. [Google Scholar] [CrossRef]
- Lepidi, M.; Gattulli, V. Non-linear interactions in the flexible multi-body dynamics of cable-supported bridge cross-sections. Int. J. Non Linear Mech. 2016, 80, 14–28. [Google Scholar] [CrossRef]
- Wu, Q.; Qi, G. Viscoelastic string-beam coupled vibro-impact system: Modeling and dynamic analysis. Eur. J. Mech. A Solids 2020, 82, 104012. [Google Scholar] [CrossRef]
- Nicaise, S.; Hadjsaleh, M.B. Polynomial Stability of a Suspension Bridge Model by Indirect Dampings. Z. Für Anal. Und Ihre Anwend. 2021, 40, 367–400. [Google Scholar] [CrossRef]
- Lenci, S.; Clementi, F.; Kloda, L.; Warminski, J.; Rega, G. Longitudinal–transversal internal resonances in Timoshenko beams with an axial elastic boundary condition. Nonlinear Dyn. 2021, 103, 3489–3513. [Google Scholar] [CrossRef]
- Bilal, N.; Tripathi, A.; Bajaj, A.K. On experiments in harmonically excited cantilever plates with 1:2 internal resonance. Nonlinear Dyn. 2020, 100, 15–32. [Google Scholar] [CrossRef]
- Guillot, V.; Givois, A.; Colin, M.; Thomas, O.; Ture Savadkoohi, A.; Lamarque, C.-H. Theoretical and experimental investigation of a 1:3 internal resonance in a beam with piezoelectric patches. J. Vib. Control 2020, 26, 1119–1132. [Google Scholar] [CrossRef]
- Ying, H.; Gao, M.; Hu, Y.; Li, Y. Nonlinear Dynamic Analysis of Axially Moving Laminated Shape Memory Alloy Beam with 1:3 Internal Resonance. Materials 2021, 14, 4022. [Google Scholar]
- Nikpourian, A.; Ghazavi, M.R.; Azizi, S. Size-dependent modal interactions of a piezoelectrically laminated microarch resonator with 3:1 internal resonance. Appl. Math. Mech. Engl. 2020, 41, 1517–1538. [Google Scholar] [CrossRef]
- Hajjaj, A.Z.; Alfosail, F.K.; Jaber, N.; Ilyas, S.; Younis, M.I. Theoretical and experimental investigations of the crossover phenomenon in micromachined arch resonator: Part II—Simultaneous 1:1 and 2:1 internal resonances. Nonlinear Dyn. 2020, 99, 407–432. [Google Scholar] [CrossRef]






















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gu, L.; Dong, C.; Zhang, Y.; Zhen, X.; Liu, G.; Ji, J. Research on One-to-Two Internal Resonance of Sling and Beam of Suspension Sling–Beam System. Buildings 2023, 13, 1319. https://doi.org/10.3390/buildings13051319
Gu L, Dong C, Zhang Y, Zhen X, Liu G, Ji J. Research on One-to-Two Internal Resonance of Sling and Beam of Suspension Sling–Beam System. Buildings. 2023; 13(5):1319. https://doi.org/10.3390/buildings13051319
Chicago/Turabian StyleGu, Lixiong, Chunguang Dong, Yi Zhang, Xiaoxia Zhen, Guiyuan Liu, and Jianyi Ji. 2023. "Research on One-to-Two Internal Resonance of Sling and Beam of Suspension Sling–Beam System" Buildings 13, no. 5: 1319. https://doi.org/10.3390/buildings13051319