
Effects of the Ground Reinforcement on the Dynamic Behaviors of Compacted Loess Embankment with Ballasted Track

Abstract
:1. Introduction
2. Brief Introduction of the 2.5D Approach and Verification
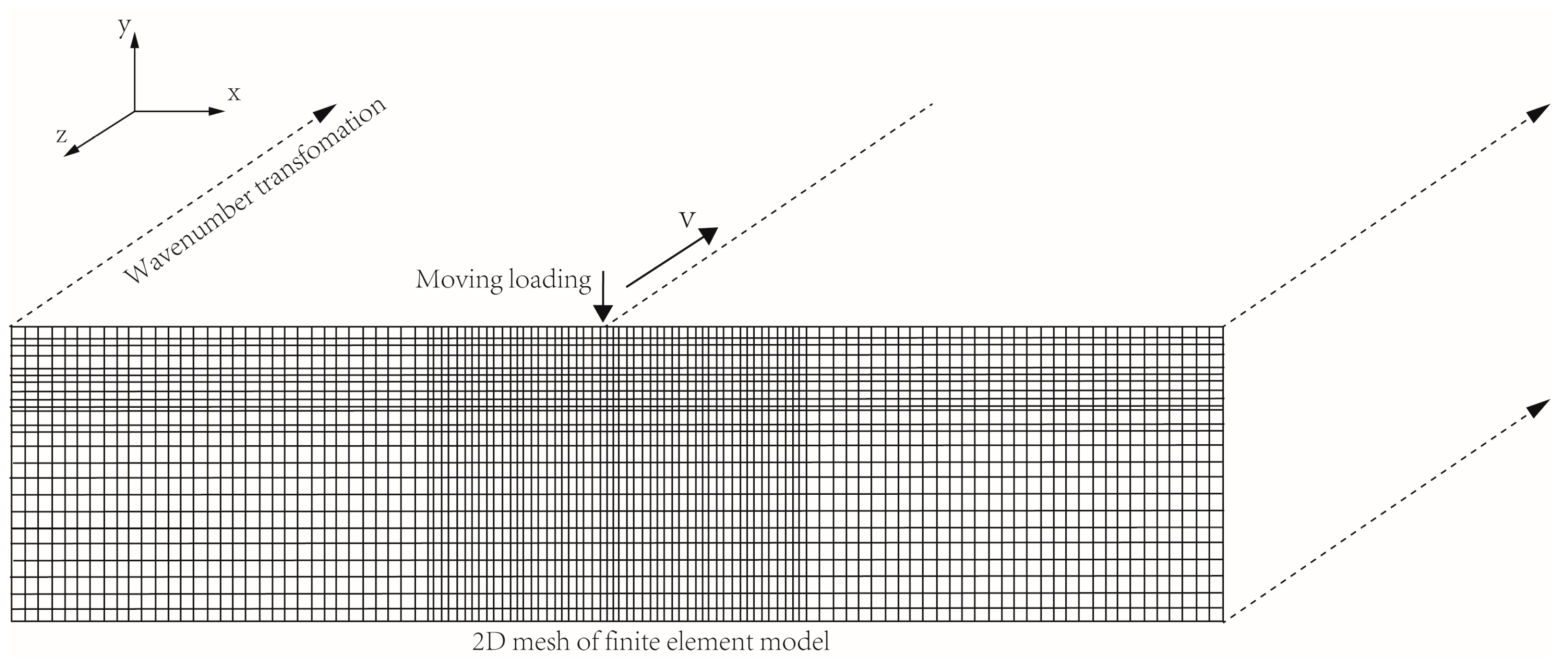
2.1. Brief Introduction of Basic Theory
2.2. Verification of the 2.5D Procedure
3. Model Information
3.1. Section and Material Parameters
3.2. Vehicle Information
4. Results and Discussion
4.1. Vertical Displacement of Track
4.2. Environmental Vibration
4.3. Dynamic Stress
5. Conclusions
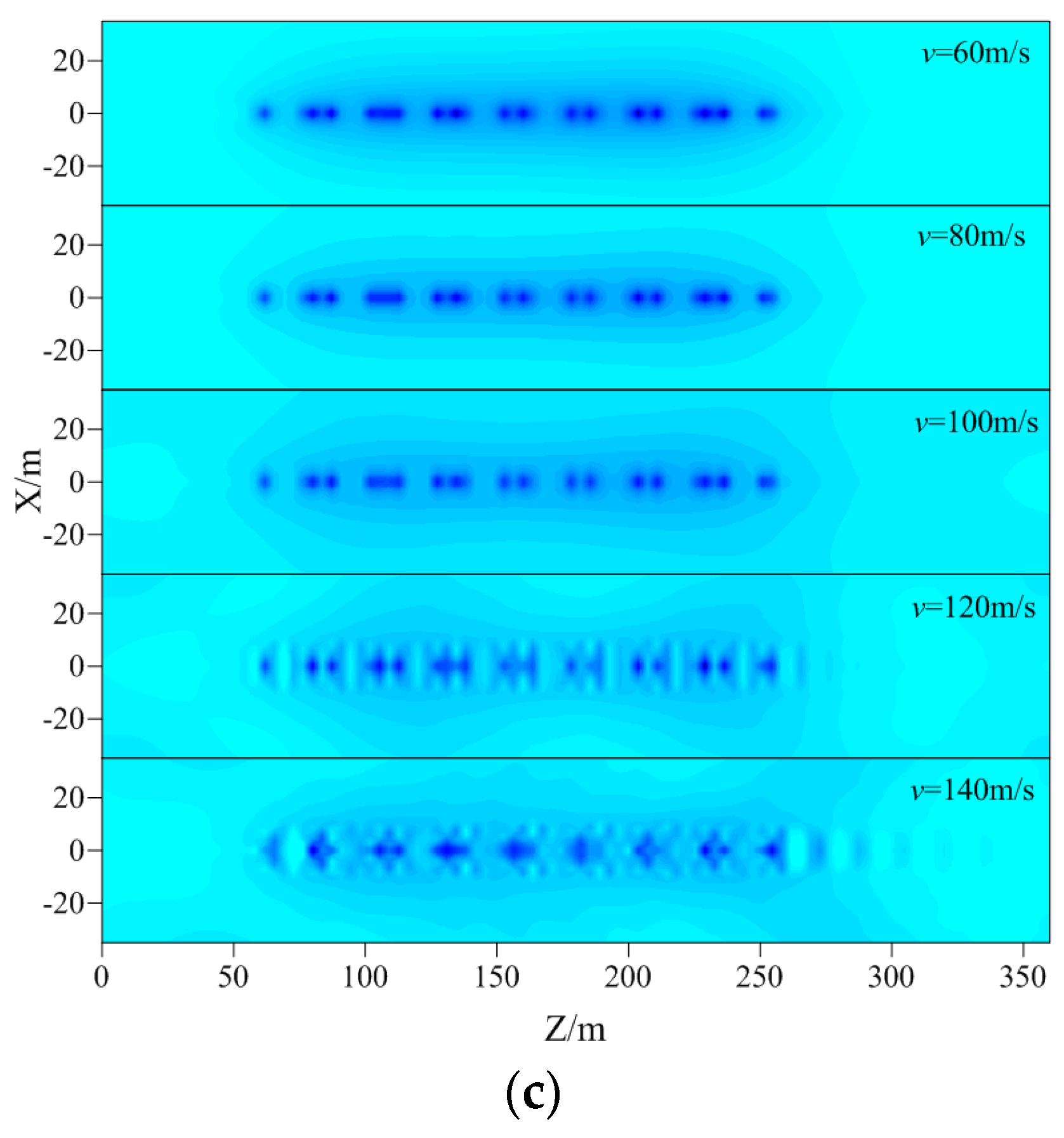
- The train speed (critical speed I) at which the maximum vertical displacement of the track occurs is higher than that (critical speed II) at which the wave propagation phenomenon occurs. The response pattern is basically changed after the wave propagation phenomenon occurs. Consequently, it is suggested to take critical speed II into account in engineering practice.
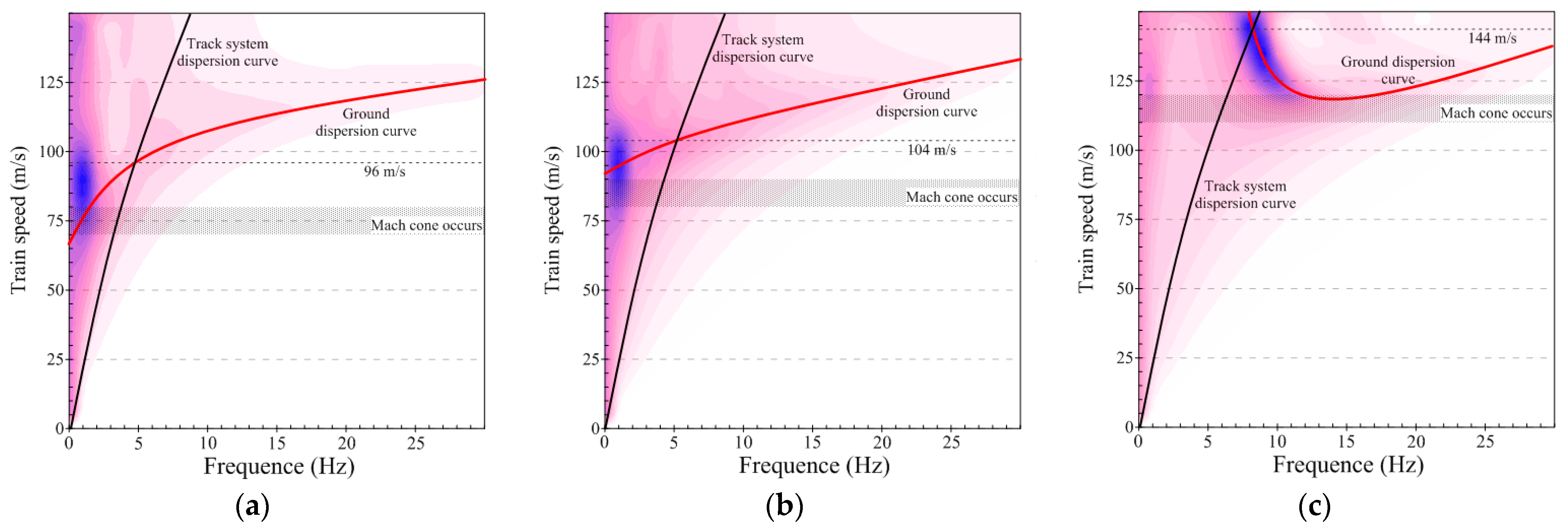
- The contour plots of the dispersion relationship of the embankment–ground could be used to determine critical speed I of the DCG and SCG models. This remained challenging for the CFGG model, resulting in an abnormal distribution of the peak area. The lower boundary limit of the peak region could be selected as the reference value of critical speed II. The obtained values of critical speed I for the DCG, SCG and CFGG models were around 92, 105 and 127 m/s, respectively. For critical speed II, the values for the same models were 75, 80 and 115 m/s, respectively.
- After reinforcement, the dynamic stress, DID, critical speed and resonant frequency increased. Meanwhile, the displacement of the track decreased. When the train speed exceeded critical speed II, the CFG pile reinforcement measure significantly changed the dynamic characteristics of the system. The vibration was confined to the embankment, isolating the wave propagation from the embankment to the ground as well as increasing the dynamic stress in the embankment.
- The DID stayed around the 3–6 m range at all speeds and increased with the increase in the train speed. The ground reinforcement also led to an increase in the DID.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Fu, Q.; Zheng, C. Three-Dimensional Dynamic Analyses of Track-Embankment-Ground System Subjected to High Speed Train Loads. Sci. World J. 2014, 2014, 924592. [Google Scholar] [CrossRef] [PubMed]
- Olivier, B.; David, P.C.; Pedro, A.C.; Georges, K. The Effect of Embankment on High Speed Rail Ground Vibrations. Int. J. Rail Transp. 2016, 4, 229–246. [Google Scholar] [CrossRef]
- Lyratzakis, A.; Tsompanakis, Y.; Psarropoulos, P.N. Efficient Mitigation of High-Speed Trains Induced Vibrations of Railway Embankments Using Expanded Polystyrene Blocks. Transp. Geotech. 2020, 22, 100312. [Google Scholar] [CrossRef]
- Yang, J.; Cui, Z. Influences of Train Speed on Permanent Deformation of Saturated Soft Soil under Partial Drainage Conditions. Soil Dyn. Earthq. Eng. 2020, 133, 106120. [Google Scholar] [CrossRef]
- Wang, C.; Zhou, S.; Wang, B.; Guo, P.; Su, H. Settlement behavior and controlling effectiveness of two types of rigid pile structure embankments in high-speed railways. Geomech. Eng. 2016, 11, 847–865. [Google Scholar] [CrossRef]
- Filz, G.M.; Sloan, J.A.; McGuire, M.P.; Smith, M.; Collin, J. Settlement and Vertical Load Transfer in Column-Supported Embankments. J. Geotech. Geoenviron. Eng. 2019, 145, 04019083. [Google Scholar] [CrossRef]
- Zhang, Z.; Rao, F.; Ye, G. Design method for calculating settlement of stiffened deep mixed column-supported embankment over soft clay. Acta Geotech. 2020, 15, 795–814. [Google Scholar] [CrossRef]
- Rui, R.; Han, J.; Zhang, L.; Zhai, Y.; Cheng, Z.; Chen, C. Simplified Method for Estimating Vertical Stress-Settlement Responses of Piled Embankments on Soft Soils. Comput. Geotech. 2020, 119, 103365. [Google Scholar] [CrossRef]
- Connolly, D.; Giannopoulos, A.; Forde, M.C. Numerical Modelling of Ground Borne Vibrations from High Speed Rail Lines on Embankments. Soil Dyn. Earthq. Eng. 2013, 46, 13–19. [Google Scholar] [CrossRef]
- Costa, P.A.; Colaço, A.; Calçada, R.; Cardoso, A.S. Critical speed of railway tracks. Detailed and simplified approaches. Transp. Geotech. 2015, 2, 30–46. [Google Scholar] [CrossRef]
- Gao, G.; Li, S. Dynamic response of CFG pile composite subgrade induced by moving train loadings. J. Vib. Shock. 2015, 34, 135–143. (In Chinese) [Google Scholar]
- Connolly, D.P.; Dong, K.; Costa, P.A.; Soares, P.; Woodward, P.K. High Speed Railway Ground Dynamics: A Multi-Model Analysis. Int. J. Rail Transp. 2020, 8, 324–346. [Google Scholar] [CrossRef]
- Li, T.; Su, Q.; Kaewunruen, S. Influences of Piles on the Ground Vibration Considering the Train-Track-Soil Dynamic Interactions. Comput. Geotech. 2020, 120, 103455. [Google Scholar] [CrossRef]
- Pécsi, M. Loess is not just the accumulation of dust. Quat. Int. 1990, 7, 1–21. [Google Scholar] [CrossRef]
- Sun, H.; Zhang, S. A field experimental study of composite foundation with rammed soil-cement pile in collapsible loess area. Adv. Mater. Res. 2014, 1030, 969–973. [Google Scholar] [CrossRef]
- Zou, X.; Zhao, Z.; Xu, D. Consolidation analysis of composite foundation with partially penetrated cement fly-ash gravel (CFG) piles under changing permeable boundary conditions. J. Cent. South Univ. 2015, 22, 4019–4026. [Google Scholar] [CrossRef]
- Yang, Y.; Hung, H. A 2.5D finite/infinite element approach for modelling visco-elastic bodies subjected to moving loads. Int. J. Numer. Methods Eng. 2001, 51, 1317–1336. [Google Scholar] [CrossRef]
- Takemiya, H. Simulation of Track–Ground Vibrations Due to a High-Speed Train: The Case of X-2000 at Ledsgard. J. Sound Vib. 2003, 261, 503–526. [Google Scholar] [CrossRef]
- Bian, X.; Chao, C.; Jin, W.; Chen, Y. A 2.5d Finite Element Approach for Predicting Ground Vibrations Generated by Vertical Track Irregularities. J. Zhejiang Univ.-SCIENCE A 2011, 12, 885–894. [Google Scholar] [CrossRef]
- Gao, G.; Chen, Q.; He, J.; Liu, F. Investigation of Ground Vibration Due to Trains Moving on Saturated Multi-Layered Ground by 2.5D Finite Element Method. Soil Dyn. Earthq. Eng. 2012, 40, 87–98. [Google Scholar] [CrossRef]
- Gao, G.; Yao, S.; Yang, J.; Chen, J. Investigating Ground Vibration Induced by Moving Train Loads on Unsaturated Ground Using 2.5D Fem. Soil Dyn. Earthq. Eng. 2019, 124, 72–85. [Google Scholar] [CrossRef]
- Wang, R.; Hu, Z.; Zhang, Y.; Zhang, X.; Chai, S. Stress field in viscoelastic medium with propagation of plane and cylindrical waves and the discussion of its application. Rock Soil Mech. 2018, 39, 4665–4672. (In Chinese) [Google Scholar]
- Wang, R.; Hu, Z.; Ma, J.; Ren, X.; Li, F.; Zhang, F. Dynamic Response and Long-Term Settlement of a Compacted Loess Embankment under Moving Train Loading. Ksce J. Civ. Eng. 2021, 25, 4075–4087. [Google Scholar] [CrossRef]
- Jing, G.; Ding, D.; Liu, X. High-Speed Railway Ballast Flight Mechanism Analysis and Risk Management—A Literature Review. Constr. Build. Mater. 2019, 223, 629–642. [Google Scholar] [CrossRef]
- Wang, R.; Wang, L.; Hu, Z.; Zhao, Z.; Li, X.; Wang, Q. Study on the dynamic characteristics of compacted loess subjected to static deviatoric stress generated by traffic loading. J. China Railw. Soc. 2019, 41, 110–117. (In Chinese) [Google Scholar]
- Zhang, J.; Gao, G.; Bi, J. Analysis of vibration mitigation for CFG pile-supported subgrade of high-speed railway. Soil Dyn. Earthq. Eng. 2023, 164, 107612. [Google Scholar] [CrossRef]
- Eason, G. The stresses produced in a semi-infinite solid by a moving surface force. Int. J. Eng. Sci. 1965, 2, 581–609. [Google Scholar] [CrossRef]
- Bian, X.; Hu, J.; Thompson, D.; Powrie, W. Pore Pressure Generation in a Poro-Elastic Soil under Moving Train Loads. Soil Dyn. Earthq. Eng. 2019, 125, 105711. [Google Scholar] [CrossRef]
- Costa, P.A.; Soares, P.; Colaco, A.; Lopes, P.; Connolly, D. Railway Critical Speed Assessment: A Simple Experimental-Analytical Approach. Soil Dyn. Earthq. Eng. 2020, 134, 106156. [Google Scholar] [CrossRef]
- Ntotsios, E.; Thompson, D.J.; Hussein, M.F.M. A Comparison of Ground Vibration Due to Ballasted and Slab Tracks. Transp. Geotech. 2019, 21, 100256. [Google Scholar] [CrossRef]
- TB 10001-2016; Code for Design of Railway Earth Structure. State Railway Administration: Beijing, China, 2016.
- Q/CR 9127-2015; Interim Code for Limit State Design of Railway Earth Structure. China Railway: Beijing, China, 2015.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Soil Layer or Structure | Thickness (m) | Density (kg·m−3) | Shear Wave Velocity (m/s) | Poisson’s Ratio |
|---|---|---|---|---|
| Crust | 1.0 | 1500 | 72 | 0.39 |
| Organic clay | 3.0 | 1260 | 41 | 0.35 |
| Clay layer 1 | 4.5 | 1475 | 65 | 0.41 |
| Clay layer 2 | 15.0 | 1475 | 87 | 0.33 |
| Carriage No. | Pn1 (kN) | Pn2 (kN) | an (m) | bn (m) | ln (m) |
|---|---|---|---|---|---|
| 1 | 160.5 | 117.5 | 2.9 | 11.6 | 0.0 |
| 2 | 122.5 | 122.5 | 2.9 | 14.8 | 24.2 |
| 3 | 122.5 | 122.5 | 2.9 | 14.8 | 24.4 |
| 4 | 122.5 | 122.5 | 2.9 | 14.8 | 24.4 |
| 5 | 180.0 | 181.5 | 2.9 | 6.6 | 24.4 |
| Soil Layer or Structure | Applicable Model | Thickness (m) | Length (m) | Density (kg·m−3) | Modulus (MPa) | Damping Ratio | Poisson’s Ratio |
|---|---|---|---|---|---|---|---|
| Surface layer of subgrade bed | ALL | 0.7 | - | 1900 | 86.5 | 0.04 | 0.25 |
| Bottom layer of subgrade bed | ALL | 2.3 | - | 1900 | 96.0 | 0.04 | 0.25 |
| Embankment below subgrade bed | ALL | - | - | 1800 | 50.0 | 0.04 | 0.25 |
| Treated soil | DCG | 3.0 | - | 1800 | 50.0 | 0.04 | 0.3 |
| Cushion | SCG | 0.8 | - | 2000 | 200 | 0 | 0.3 |
| CFGG | |||||||
| Soil–cement compacted pile | SCG | - | 15 | 2000 | 100 | 0 | 0.23 |
| Soil among pile | SCG | 15 | - | 2000 | 50.0 | 0.04 | 0.25 |
| CFG pile | CFGG | - | 15 | 2500 | 25,500 | 0 | 0.17 |
| Soil layer 1 | ALL | 7.0 | - | 1980 | 26.3 | 0.05 | 0.32 |
| Soil layer 2 | ALL | 6.0 | - | 1880 | 17.9 | 0.05 | 0.33 |
| Soil layer 3 | ALL | 24.0 | - | 1990 | 41.1 | 0.05 | 0.32 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, X.; Wang, R.; Hu, Z.; Wen, X. Effects of the Ground Reinforcement on the Dynamic Behaviors of Compacted Loess Embankment with Ballasted Track. Buildings 2023, 13, 860. https://doi.org/10.3390/buildings13040860
Wei X, Wang R, Hu Z, Wen X. Effects of the Ground Reinforcement on the Dynamic Behaviors of Compacted Loess Embankment with Ballasted Track. Buildings. 2023; 13(4):860. https://doi.org/10.3390/buildings13040860
Chicago/Turabian StyleWei, Xinsheng, Rui Wang, Zhiping Hu, and Xin Wen. 2023. "Effects of the Ground Reinforcement on the Dynamic Behaviors of Compacted Loess Embankment with Ballasted Track" Buildings 13, no. 4: 860. https://doi.org/10.3390/buildings13040860