
Stability and Resilience—A Systematic Approach


Abstract
:1. Introduction
2. Methodology and Analysis Tools
3. A Review of Stability Concept Terminology
4. Stability Concepts Classification
4.1. Dynamic Stability
4.2. Structural Stability
5. Application of Stability to Resilience Thinking
5.1. Resilience as the Ability of the System to Return to Initial State
5.2. Resilience as System’s Form Return Ability
6. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Leine, R.I. The Historical Development of Classical Stability Concepts: Lagrange, Poisson and Lyapunov Stability. Nonlinear Dynamics 2010, 59, 173–182. [Google Scholar] [CrossRef]
- Hahn, W. Generalities. Die Grundlehren der mathematischen Wissenschaften. In Stability of Motion; Hahn, W., Ed.; Springer: Berlin, Heidelberg, 1967; pp. 1–8. ISBN 978-3-642-50085-5. [Google Scholar]
- Timoshenko, S.P.; Gere, J.M. Theory of Elastic Stability, 2nd ed.; Engineering Societies Monographs; McGraw-Hill: New York, NY, USA, 1961; ISBN 0-486-47207-8. [Google Scholar]
- Newell, K.M.; Corcos, D.M. Variability and Motor Control; Human Kinetics Publishers: Champaign, IL, USA, 1993; ISBN 0-87322-424-8. [Google Scholar]
- Odum, E.P. Fundamentals of Ecology; W.B. Saunders Company: Philadelphia, PA, USA, 1953. [Google Scholar]
- Justus, J. Complexity, Diversity, and Stability. In A Companion to the Philosophy of Biology; John Wiley & Sons, Ltd.: Chichester, UK, 2007; pp. 321–350. ISBN 978-0-470-69659-0. [Google Scholar]
- Grimm, V.; Wissel, C. Babel, or the Ecological Stability Discussions: An Inventory and Analysis of Terminology and a Guide for Avoiding Confusion. Oecologia 1997, 109, 323–334. [Google Scholar] [CrossRef] [PubMed]
- Yunes, M.A.M. Psicologia Positiva e Resiliência: O Foco No Indivíduo e Na Família. Psicol. Estud. 2003, 8, 75–84. [Google Scholar] [CrossRef]
- Sudmeier-Rieux, K. Resilience—an Emerging Paradigm of Danger or of Hope? Disaster Prev. Manag. 2014, 23, 67–80. [Google Scholar] [CrossRef]
- Holling, C.S. Resilience and Stability of Ecological Systems. Annu. Rev. Ecol. Syst. 1973, 4, 1–23. [Google Scholar] [CrossRef]
- Holling, C.S. Engineering Resilience versus Ecological Resilience. In Engineering within Ecological Constraints; Academy Press: Washington, DC, USA, 1996; p. 13. [Google Scholar]
- Bhamra, R.; Dani, S.; Burnard, K. Resilience: The Concept, a Literature Review and Future Directions. Int. J. Prod. Res. 2011, 49, 5375–5393. [Google Scholar] [CrossRef]
- Scopus. Scopus Database Search on Resilience vs. Stability Literature. 2022. Available online: https://www.scopus.com/search/form.uri?display=basic (accessed on 8 August 2022).
- Van Meerbeek, K.; Jucker, T.; Svenning, J.-C. Unifying the Concepts of Stability and Resilience in Ecology. J. Ecol. 2021, 109, 3114–3132. [Google Scholar] [CrossRef]
- Odum, E.P. Ecology and Our Endangered Life-Support Systems, 2nd ed.; Sinauer Associates: Sunderland, MA, USA, 1989; ISBN 0-87893-635-1. [Google Scholar]
- Seybold, C.A.; Herrick, J.E.; Brejda, J.J. Soil Resilience: A Fundamental Component of Soil Quality. Soil Sci. 1999, 164, 224–234. [Google Scholar] [CrossRef]
- Arnoldi, J.-F.; Loreau, M.; Haegeman, B. Resilience, Reactivity and Variability: A Mathematical Comparison of Ecological Stability Measures. J. Theor. Biol. 2016, 389, 47–59. [Google Scholar] [CrossRef]
- Dai, L.; Korolev, K.S.; Gore, J. Relation between Stability and Resilience Determines the Performance of Early Warning Signals under Different Environmental Drivers. Proc. Natl. Acad. Sci. USA 2015, 112, 10056–10061. [Google Scholar] [CrossRef]
- Mayar, K.; Carmichael, D.G.; Shen, X. Resilience and Systems—A Review. Sustainability 2022, 14, 8327. [Google Scholar] [CrossRef]
- Carmichael, D.G. The Conceptual Power of Control Systems Theory in Engineering Practice. Civ. Eng. Environ. Syst. 2013, 30, 231–242. [Google Scholar] [CrossRef]
- Carmichael, D.G. Structural Modelling and Optimization: A General Methodology for Engineering and Control; Ellis Horwood: Chichester, UK, 1981; ISBN 0-470-27114-0. [Google Scholar]
- De Oliveira, M.C. Fundamentals of Linear Control; Cambridge University Press: Cambridge, UK, 2017; ISBN 1-107-18752-4. [Google Scholar]
- Zayas, V.A.; Low, S.S.; Mahin, S.A. A Simple Pendulum Technique for Achieving Seismic Isolation. Earthq. Spectra 1990, 6, 317–333. [Google Scholar] [CrossRef]
- Dandy, G.; Walker, D.; Daniell, T.; Warner, R.; Foley, B. Planning and Design of Engineering Systems, 2nd ed.; CRC Press: London, UK, 2017; ISBN 1-138-03192-5. [Google Scholar]
- Kossiakoff, A.; Sweet, W.N. Systems Engineering: Principles and Practices, 2nd ed.; Wiley-Interscience: Hoboken, NJ, USA, 2011; ISBN 0-471-23443-5. [Google Scholar]
- Blanchard, B.S.; Fabrycky, W.J.; Fabrycky, W.J. Systems Engineering and Analysis; Prentice Hall: Englewood Cliffs, NJ, USA, 1990; Volume 4. [Google Scholar]
- Khalil, H.K.; Grizzle, J.W. Nonlinear Systems; Prentice Hall: Upper Saddle River, NJ, USA, 2002; Volume 3. [Google Scholar]
- DiStefano, J.J.; Stubberud, A.J.; Williams, I.J. Schaum’s Outline of Feedback and Control Systems, 3rd ed.; McGraw-Hill Professional: New York, NY, USA, 1997. [Google Scholar]
- Beisner, B.E.; Haydon, D.T.; Cuddington, K. Alternative Stable States in Ecology. Front. Ecol. Environ. 2003, 1, 376–382. [Google Scholar] [CrossRef]
- Meyer, K. A Mathematical Review of Resilience in Ecology. Nat. Resour. Model. 2016, 29, 339–352. [Google Scholar] [CrossRef]
- Chesi, G. Domain of Attraction: Analysis and Control via SOS Programming; Lecture Notes in Control and Information Sciences; Springer-Verlag: London, UK, 2011; ISBN 978-0-85729-958-1. [Google Scholar]
- Ahmed, N.U. Dynamic Systems and Control with Applications; World Scientific Publishing Company: Singapore, 2006; ISBN 981-310-682-4. [Google Scholar]
- Levine, W.S. The Control Handbook, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2010. [Google Scholar]
- Cull, P. Global Stability of Population Models. Bull. Math. Biol. 1981, 43, 47–58. [Google Scholar] [CrossRef]
- Hinrichsen, D. Mathematical Systems Theory I: Modelling, State Space Analysis, Stability and Robustness; Texts in Applied Mathematics, 48; Springer: Berlin, Heidelberg, 2005; ISBN 978-3-540-26410-1. [Google Scholar]
- Chen, G. Stability of Nonlinear Systems. Encycl. RF Microw. Eng. 2004, 6, 4881–4896. [Google Scholar]
- Kapitaniak, T.; Thylwe, K.-E. Monotonic Stability. Chaos Solitons Fractals 1996, 7, 1411–1415. [Google Scholar] [CrossRef]
- Dorato, P. An Overview of Finite-Time Stability. In Current Trends in Nonlinear Systems and Control: In Honor of Petar Kokotović and Turi Nicosia; Menini, L., Zaccarian, L., Abdallah, C.T., Eds.; Systems and Control: Foundations & Applications; Birkhäuser: Boston, MA, USA, 2006; pp. 185–194. ISBN 978-0-8176-4470-3. [Google Scholar]
- Hong, Y.; Wang, J.; Xi, Z. Stabilization of Uncertain Chained Form Systems within Finite Settling Time. IEEE Trans. Autom. Control 2005, 50, 1379–1384. [Google Scholar] [CrossRef]
- Bhat, S.P.; Bernstein, D.S. Finite-Time Stability of Continuous Autonomous Systems. SIAM J. Control Optim. 2000, 38, 751–766. [Google Scholar] [CrossRef]
- Amato, F.; De Tommasi, G.; Pironti, A. Finite-Time Stability: An Input-Output Approach; John Wiley & Sons: Croydon, UK, 2018; ISBN 1-119-14052-8. [Google Scholar]
- Sontag, E.D. Input to State Stability: Basic Concepts and Results. In Nonlinear and Optimal Control Theory: Lectures given at the C.I.M.E. Summer School held in Cetraro, Italy 19–29 June 2004; Agrachev, A.A., Morse, A.S., Sontag, E.D., Sussmann, H.J., Utkin, V.I., Nistri, P., Stefani, G., Eds.; Lecture Notes in Mathematics; Springer: Berlin, Heidelberg, 2008; pp. 163–220. ISBN 978-3-540-77653-6. [Google Scholar]
- Dorf, R.C. Modern Control Systems; Pearson Prentice Hall: Upper Saddle River, NJ, USA, 2005. [Google Scholar]
- Carmichael, D.G. Incorporating Resilience through Adaptability and Flexibility. Civ. Eng. Environ. Syst. 2015, 32, 31–43. [Google Scholar] [CrossRef]
- Mascolo, I. Recent Developments in the Dynamic Stability of Elastic Structures. Front. Appl. Math. Stat. 2019, 5, 51. [Google Scholar] [CrossRef]
- Batabyal, A.A.; Beladi, H. The Stability of Stochastic Systems: The Case of Persistence and Resilience. Math. Comput. Model. 1999, 30, 27–34. [Google Scholar] [CrossRef]
- Vu, H.V.; Esfandiari, R.S. Dynamic Systems: Modelling and Analysis; McGraw-Hill Science, Engineering & Mathematics: New York, NY, USA, 1997; ISBN 0-07-021673-8. [Google Scholar]
- Bingham, J.T.; Ting, L.H. Stability Radius as a Method for Comparing the Dynamics of Neuromechanical Systems. IEEE Trans. Neural Syst. Rehabil. Eng. 2013, 21, 840–848. [Google Scholar] [CrossRef]
- Margalef, R. Diversity and Stability: A Practical Proposal and a Model of Interdependence. Brookhaven Symp. Biol. 1969, 22, 25–37. [Google Scholar] [PubMed]
- Murdoch, W.W. Population Regulation and Population Inertia. Ecology 1970, 51, 497–502. [Google Scholar] [CrossRef]
- Orians, G.H. Diversity, Stability and Maturity in Natural Ecosystems. In Unifying Concepts in Ecology: Report of the Plenary Sessions of the First International Congress of Ecology, The Hague, The Netherlands, 8–14 September 1974; van Dobben, W.H., Lowe-McConnell, R.H., Eds.; Springer Netherlands: Dordrecht, The Netherlands, 1975; pp. 139–150. ISBN 978-94-010-1954-5. [Google Scholar]
- Connell, J.H.; Sousa, W.P. On the Evidence Needed to Judge Ecological Stability or Persistence. Am. Nat. 1983, 121, 789–824. [Google Scholar] [CrossRef]
- Anderies, J.M. Embedding Built Environments in Social–Ecological Systems: Resilience-Based Design Principles. Build. Res. Inf. 2013, 42, 1–13. [Google Scholar] [CrossRef]
- Jen, E. Stable or Robust? What’s the Difference? Complexity 2003, 8, 12–18. [Google Scholar] [CrossRef]
- Kouvaritakis, B.; Owens, D.H.; Grimble, M.J. Sensitivity and Robustness in Control Systems Theory and Design. Available online: https://digital-library.theiet.org/content/journals/10.1049/ip-d.1982.0049 (accessed on 20 July 2022).
- Anderies, J.M.; Folke, C.; Walker, B.; Ostrom, E. Aligning Key Concepts for Global Change Policy: Robustness, Resilience, and Sustainability. Ecol. Soc. 2013, 18, 1–21. [Google Scholar] [CrossRef]
- Csete, M.E.; Doyle, J.C. Reverse Engineering of Biological Complexity. Science 2002, 295, 1664–1669. [Google Scholar] [CrossRef] [PubMed]
- Ludwig, D.; Walker, B.; Holling, C.S. Sustainability, Stability, and Resilience. Conserv. Ecol. 1997, 1, 1–21. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System | System Model | System States, Input, and Output | System Parameters and Equilibrium States | Source |
|---|---|---|---|---|
| Case example 1: Lumped mass dynamic system (a single degree of freedom structure subjected to a lateral loading such as an earthquake)—a linear time-invariant second-order dynamic system. | Model initial form: State-space form: Alternative frequency form: | (displacement) (rate of displacement) (seismic acceleration as the input variable) (displacement as the system output) | = 1, mass of the structure; = damping coefficient; = 4, elastic stiffness of the structural materials; = ground displacement due to earthquake; = displacement of the mass relative to the ground due to earthquake. System natural frequency: (under damped); (critically damped); (over damped); Equilibrium: | [21] |
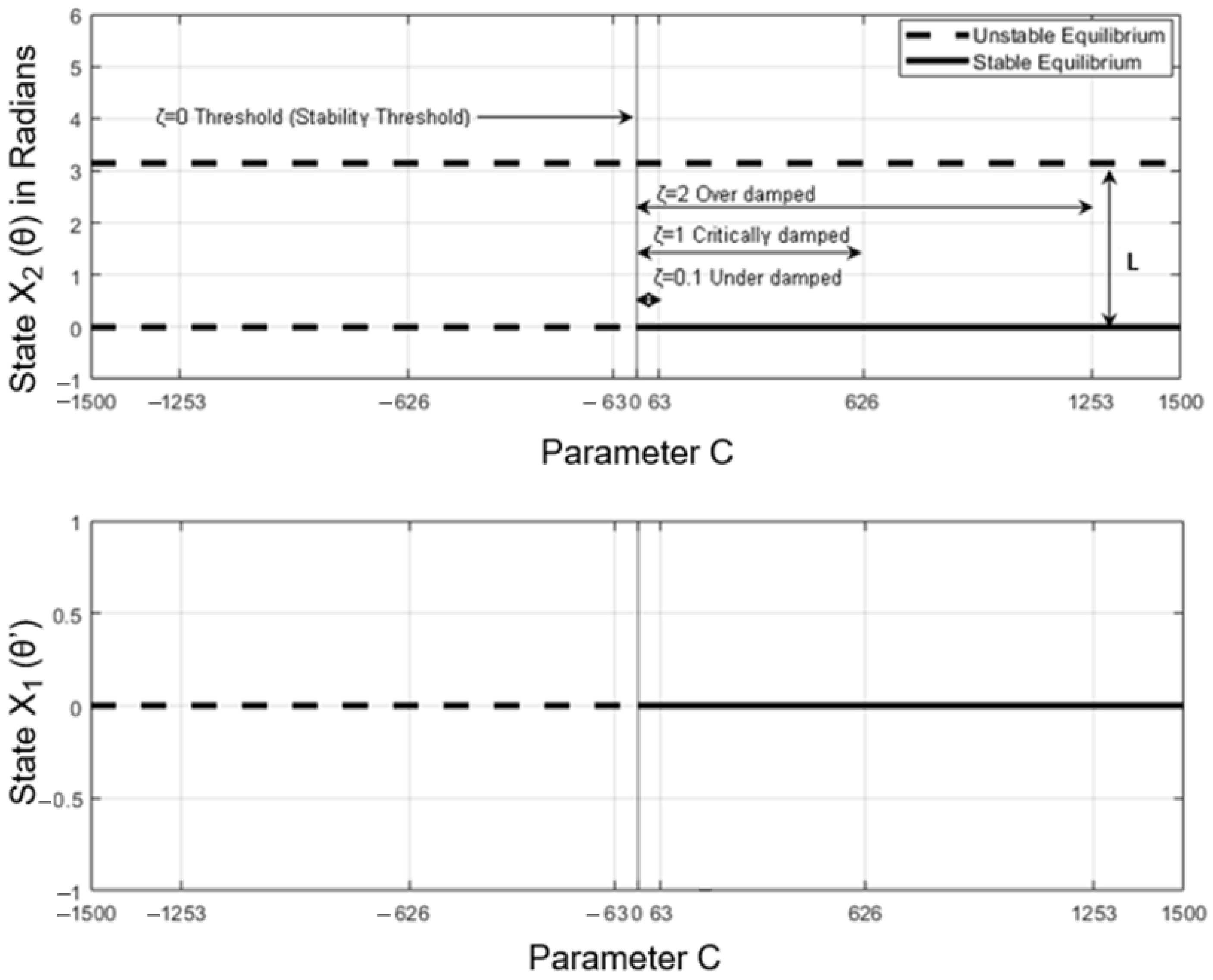
| Case example 2: Simple pendulum system—a nonlinear time-invariant second-order dynamic system. | Model initial form: | (rate of angular displacement) (angular displacement) (acceleration triggered by the relevant torque as the input variable)(angular displacement as the system output) | θ = displacement angle of the pendulum with the vertical direction; l = 1000, length of the rod; m = 100, mass of the attached weight (w); C = damping coefficient; g = 9810, gravitational acceleration; u = acceleration triggered by the relevant torque; ; The two equilibria in a combined form: Eigenvalues/poles: | [22,23] |
| Stability Concept | Definition |
|---|---|
| System | A system is an assemblage of functionally related components forming a unity whole to achieve a certain purpose [20,24,25,26]. A system is described by the overarching fundamental variables of state (x), input (u), and output (y). Equations (13)–(16) describe the linear time invariant and nonlinear time variant continuous systems, where A is the system state or dynamic matrix, B is the input or control matrix, C is the output matrix, and D is the direct transfer or feedforward matrix. fi and gj are scalar arguments of the state, input, and time (t) vectors [27,28]. |
| Perturbations and change | Perturbations and changes cause a system state or a system form to deviate from its initial state or initial form [29,30]. |
| Equilibrium | Equilibrium is a system state value at the system state space where the system lies at rest (with zero rate of change). It has either a stable or unstable region around it [31]. |
| Equilibrium is said to be dynamically stable (attractor) when a system state perturbed by a bounded external perturbation from its equilibrium state remains bounded, including a return to the equilibrium [32]. It can also be dynamically stable when the system state matrix/Jacobian eigenvalues/poles lie within the left half-plane (LHP) [33]. |
| Equilibrium is said to be dynamically unstable (repellor) when a system state perturbed by a bounded external perturbation from its equilibrium state remains unbounded [32], or when the system state matrix/Jacobian eigenvalues/poles lie within the right half-plane (RHP) [33]. |
| Local stability | Common in nonlinear systems where the system domain of attraction covers only a certain area in the phase space. If the system state is perturbed within the boundary of this domain of attraction, it will asymptotically return to the equilibrium state [34]. |
| Global stability | Common in linear systems. Here, the system domain of attraction covers its entire phase space. If the system state is perturbed, it will converge asymptotically to the equilibrium state [34]. |
| Lyapunov stability | Also known as internal stability, it is applied to autonomous systems. A system is stable about an equilibrium state in the sense of Lyapunov, if all initial values of states starting near the equilibrium state, stay near the equilibrium state [27,35]. Lyapunov analysis includes the approaches. |
| Better suited for smaller perturbations, it is based on the linearization of a nonlinear system around an equilibrium state and subsequently finding its eigenvalues, which need to be equal to or more than zero for the system to be stable [27,35]. |
| Provides invaluable insights into the qualitative behavior of nonlinear systems, including their domains of attraction, thresholds, and global stability. The method is directly applied to nonlinear systems without going through any linearization process. In this approach, using a Lyapunov function, if the total energy of a system is continuously dissipating/decreasing along its state trajectory, it will eventually reach a stable equilibrium state where it will remain at rest. However, both stable in the sense of Lyapunov, and asymptotically stable are mathematically stable systems; from an engineering perspective, they are not desirable as the time taken for the system state to return to the equilibrium state is infinite [27,32]. |
| Asymptotic stability | If a system is perturbed from its equilibrium state and it ultimately returns to the equilibrium state, is called asymptotically stable. More precisely, a system is asymptotically stable if it is stable in the sense of Lyapunov and there exists a positive constant for which the system state deviations converge to zero as time goes to infinity [32]. |
| Exponential stability | If a Lyapunov stable system returns to the equilibrium state with an exponential rate of decay, it is termed exponentially stable. From exponential stability, the time required for the perturbed system to return to the equilibrium state can be readily calculated and therefore this is the most desirable property in engineering systems [32,36]. |
| Monotonic stability | As a special case of asymptotic stability, a monotonically stable system is one in which the perturbed state returns to the stable equilibrium state monotonically (through a monotonic decay of perturbations) [37]. Monotonic here translates into a constant decreasing trend of perturbations over the entire domain of application. The energy function for a more visual representation of this trend would be a uniform decrease in perturbations without any oscillations (no imaginary part of the system state/Jacobian matrix eigenvalues). It is the absence of oscillations that renders monotonic stability a distinctive case of asymptotic stability. |
| Finite-time stability (FTS) | A dynamical system state is finite-time stable if its trajectory starts from an initial value within a prescribed bound of the equilibrium state and returns to zero in a finite time frame. Various methods are used for calculating finite time stability measures (such as the settling time function), including Lyapunov theory [38,39,40]. A further practical application of FTS is in the analysis and control of input–output dynamical systems [41]. It should be mentioned that finite-time stability and exponential stability are similar, closely related concepts. |
| Bounded-input bounded-output (BIBO) stability | Also referred to as external stability or forced response mode stability. In BIBO stability a system is a casual operator mapping bounded inputs into bounded outputs, which means that a stable system should render a bounded/limited/finite output for all time when a bounded/limited/finite input is exerted. This type of stability is well-suited for application in the context of linear systems [42,43]. |
| Input-state stability (ISS). i.e., bounded-input bounded state (BIBS) | A unified approach of internal and external stabilities that is well-suited for application in the nonlinear systems context. Here, for any bounded input there should be a bounded state [27] (Khalil and Grizzle, 2002). In a special case, if the output is equal to the system state, then the system is also BIBO stable (externally stable). |
| Structural stability | Structural stability is indicative of the robustness of the qualitative behavior of system equilibrium trajectories that are not affected by small internal perturbations (model/parameter uncertainties) or not changed radically (such as the emergence of a new domain of attraction, bifurcating branches, etc.) as a result of the small parameter changes [17,36]. Depending on the system focus and context, parameter uncertainty can be studied either in the form of assemblage or certain/individual parameters of interest. |
| Dynamic Stability Concept | Dominant Eigenvalue | Settling Time | System State/Output Behavior/Performance |
|---|---|---|---|
| Linear systems, single equilibrium and global stability Perturbations: state initial value and input temporary disturbance after it is discontinued | |||
| Asymptotic stability (BIBO and BIBS are also guaranteed) | Negative real part with zero or non-zero imaginary parts | Infinite | Oscillatory or monotonic |
| Exponential—finite-time stability with monotonic behavior | Negative real part with zero imaginary parts | Finite | Monotonic |
| Exponential—finite-time stability with oscillatory behavior | Negative real part with non-zero imaginary parts | Finite | Oscillatory |
| Marginal stability—stability in the sense of Lyapunov | Only imaginary parts | Never/not guaranteed | Limit circles/hovering around the equilibrium |
| Mainly nonlinear systems (particularly time-varying), multiple equilibriums and local stabilities Perturbation: state initial value and input temporary disturbance after it is disconnected | |||
| Lyapunov stability (first method), linearization | Negative real part with zero or non-zero imaginary parts | Infinite | Oscillatory or monotonic (local) |
| Lyapunov stability (second method) | There has to be a Lyapunov function that is positive definite (global asymptotic stability) or positive semi-definite (local asymptotic stability) | Infinite | Monotonic (global) or oscillatory (local) |
| Remark: BIBO and BIBS can be considered a part of the dynamic stability for the period immediately after the temporary input disturbance is discontinued. If a permanent input in the sense of an active control is considered, then it becomes a closed-loop dynamic stability (Figure 5) | |||
| Stability | Settling Time | Engineering Resilience Application Ranking |
|---|---|---|
| Linear systems, single equilibrium, and global stability Perturbations: state initial value and input temporary disturbance after it is discontinued | ||
| Asymptotic stability (BIBO and BIBS are also guaranteed) | Infinite | Least favorable |
| Exponential—finite-time stability with monotonic behavior | Finite | Highly favorable |
| Exponential—finite-time stability with oscillatory behavior | Finite | Favorable |
| Marginal stability—stability in the sense of Lyapunov | Never/not guaranteed | Not favorable |
| Mainly nonlinear systems (particularly time-varying), multiple equilibriums and local stabilities Perturbation: state initial value and input temporary disturbance after it is disconnected | ||
| Lyapunov stability (first method, linearization) | Infinite | Least favorable |
| Nonlinear systems (particularly time-varying), multiple equilibriums and local stabilities Perturbation/change: system changes/parameter uncertainty | ||
| Lyapunov stability (second method) | Infinite | Less favorable |
| Dynamic Stability | Eigenvalue-1 | Eigenvalue-2 | Dominant Eigenvalue Real Part | The Approximate Settling Time within 2% of Steady-State Error | Resistance to Perturbation (Damping) | |
|---|---|---|---|---|---|---|
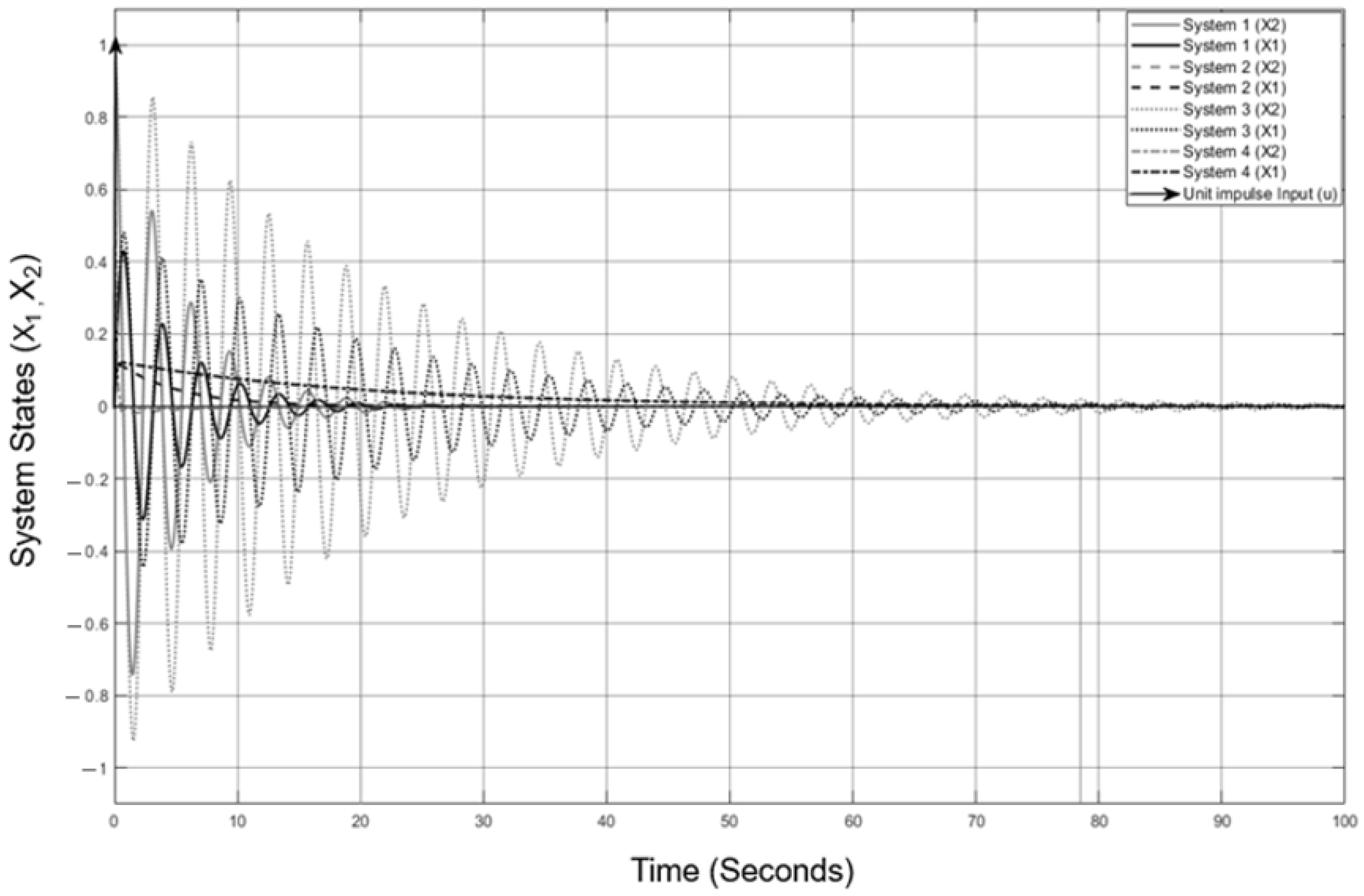
| System 1: exponential oscillatory stability | −0.2000 + 1.9900 i | −0.2000 + 1.9900 i | −0.20 | 20 s | ||
| System 2: exponential monotonic stability | −8.0000 | −0.2000 | −0.20 | 20 s | ||
| System 3: exponential oscillatory stability | −0.0500 + 1.9994 i | −0.0500 + 1.9994 i | −0.05 | 78 s | ||
| System 5: exponential monotonic stability | −8.0000 | −0.0500 | −0.05 | 78 s |
| System | Case Example 1 | Case Example 2 | ||
|---|---|---|---|---|
| Dynamic Stability (Settling Time) | Resistance to Perturbation as Indicator of Passive Control (c) | Dynamic Stability (Settling Time) | Resistance to Perturbation as Indicator of Passive Control (c) | |
| Marginal stable system ) | Never | 0 | Never | 0 |
| ) | 20 s | 0.4 | 17 s | 63 |
| ) | 3.5 s | 1 | 3 s | 626 |
| ) | 8 s | 2 | 7 s | 1253 |
| System | Engineering Resilience/Socio-Ecological Resilience (Case Example 1) | Socio-Ecological Resilience (Case Example 2) | |||
|---|---|---|---|---|---|
| Dynamic Stability (Settling Time) | Resistance (R) to Perturbation—Indicator of Passive Control (c) | Maximum Input Disturbance That Can Flip the System State into Another Stable Domain | Resistance (R) to Perturbation—Indicator of Passive Control (c) | Maximum Input Disturbance That Can Flip the System State into Another Stable Domain | |
| Never | 0 | Infinite | 0 | 9.81 | |
| 20 s | 0.4 | Infinite | 63 | 9.81 | |
| 3.5 s | 1 | Infinite | 626 | 9.81 | |
| 8 s | 2 | Infinite | 1253 | 9.81 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mayar, K.; Carmichael, D.G.; Shen, X. Stability and Resilience—A Systematic Approach. Buildings 2022, 12, 1242. https://doi.org/10.3390/buildings12081242
Mayar K, Carmichael DG, Shen X. Stability and Resilience—A Systematic Approach. Buildings. 2022; 12(8):1242. https://doi.org/10.3390/buildings12081242
Chicago/Turabian StyleMayar, Khalilullah, David G. Carmichael, and Xuesong Shen. 2022. "Stability and Resilience—A Systematic Approach" Buildings 12, no. 8: 1242. https://doi.org/10.3390/buildings12081242