
Optimized Design of a Tuned Mass Damper Inerter (TMDI) Applied to Circular Section Members of Transmission Towers



Abstract
:1. Introduction
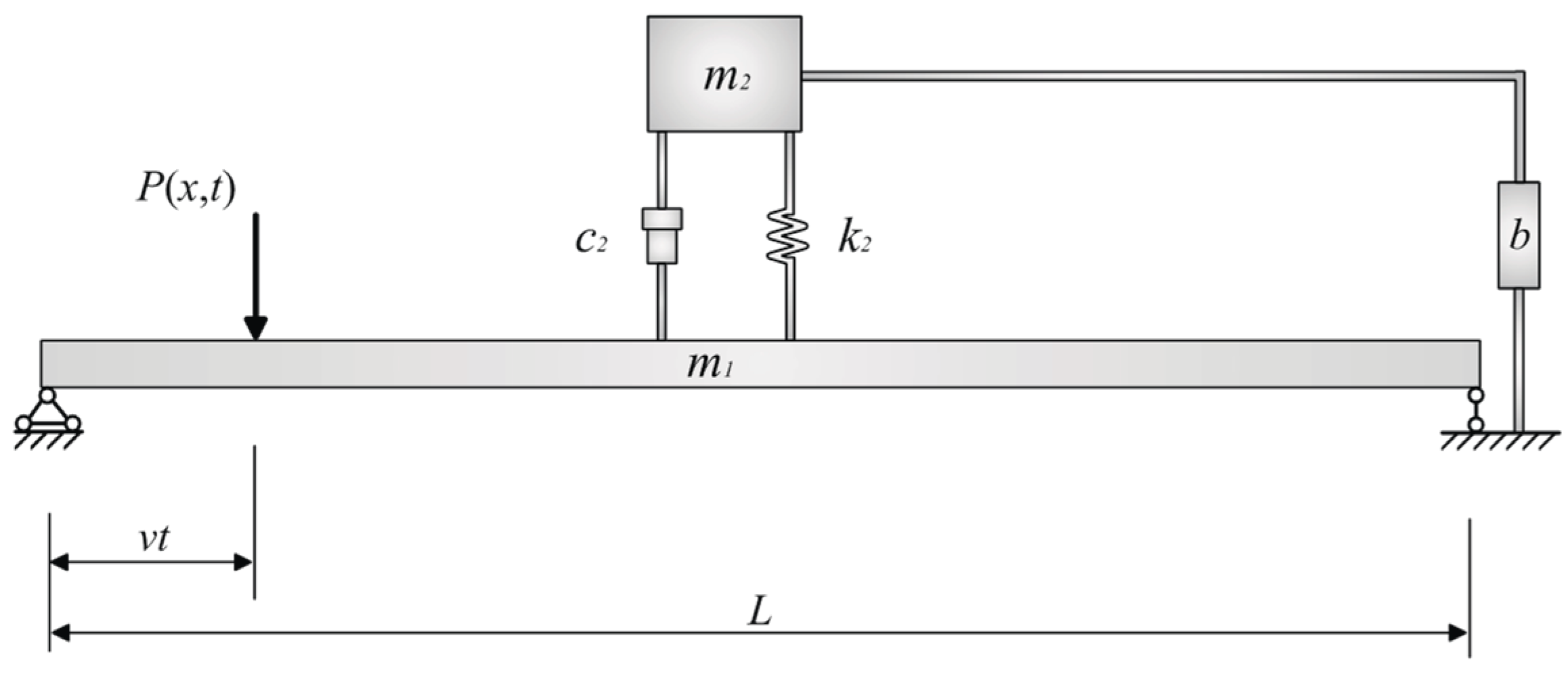
2. Design Methodology of TMDI System
2.1. Theoretical Model
2.2. Governing Equations
2.3. External Excitation and Structural Response
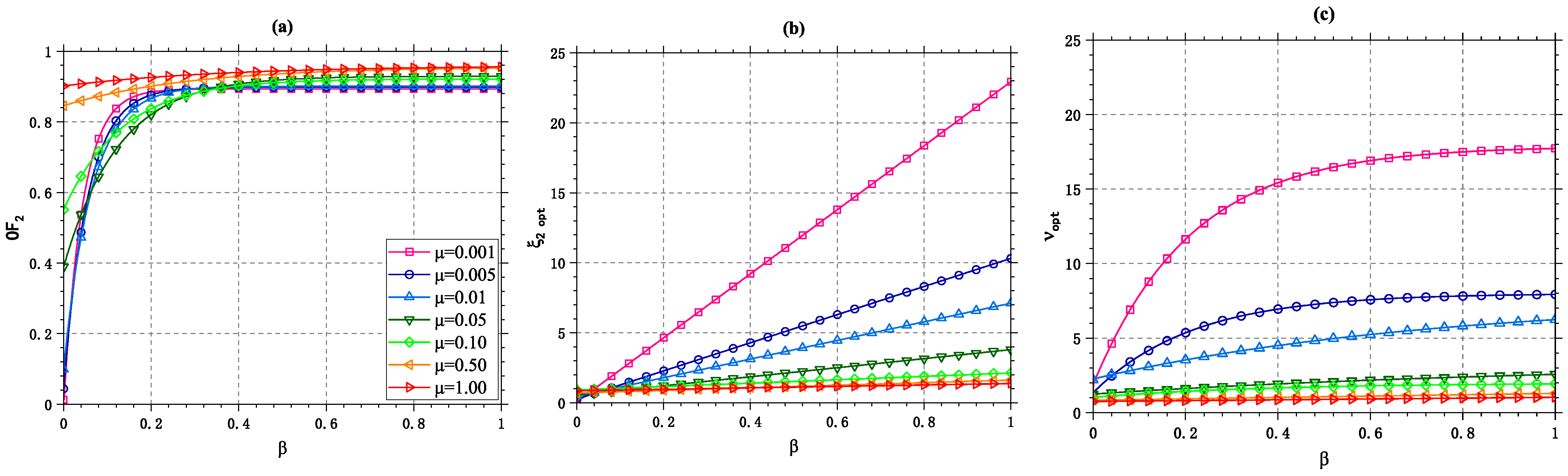
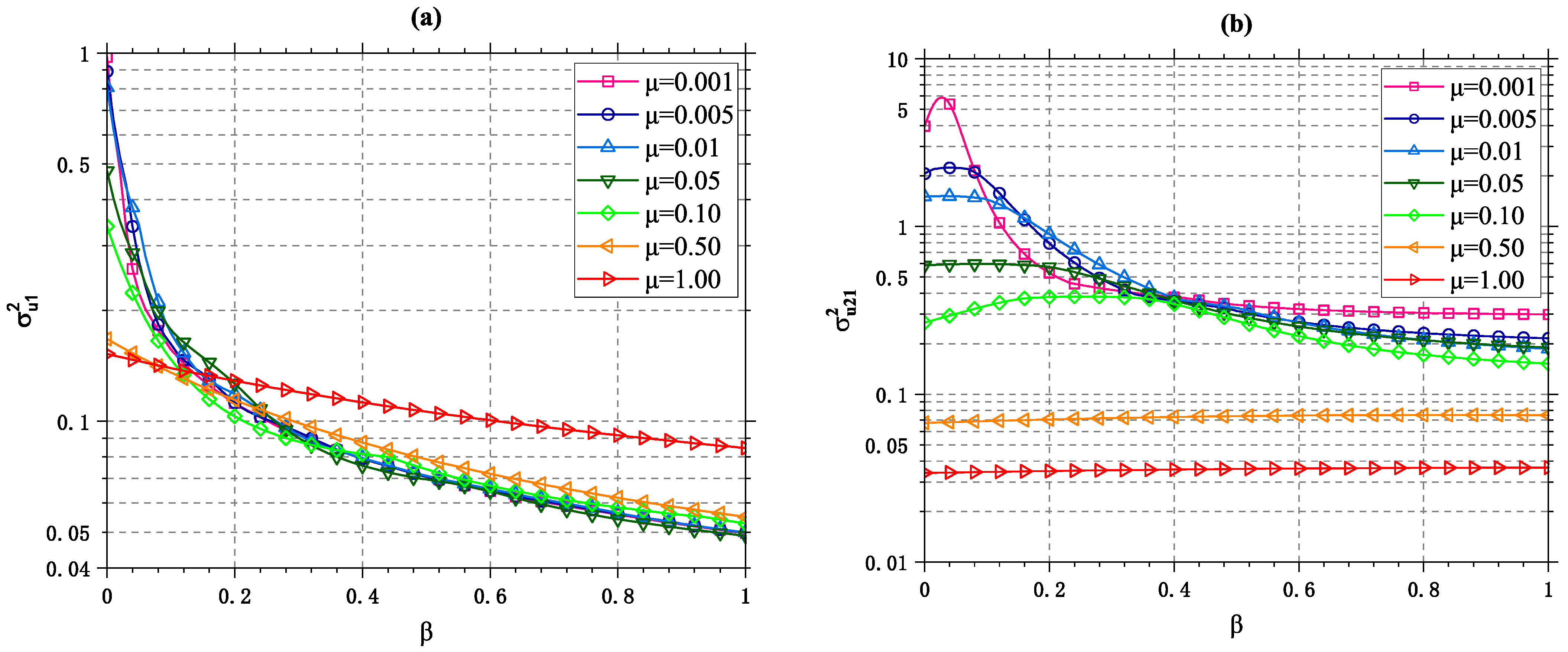
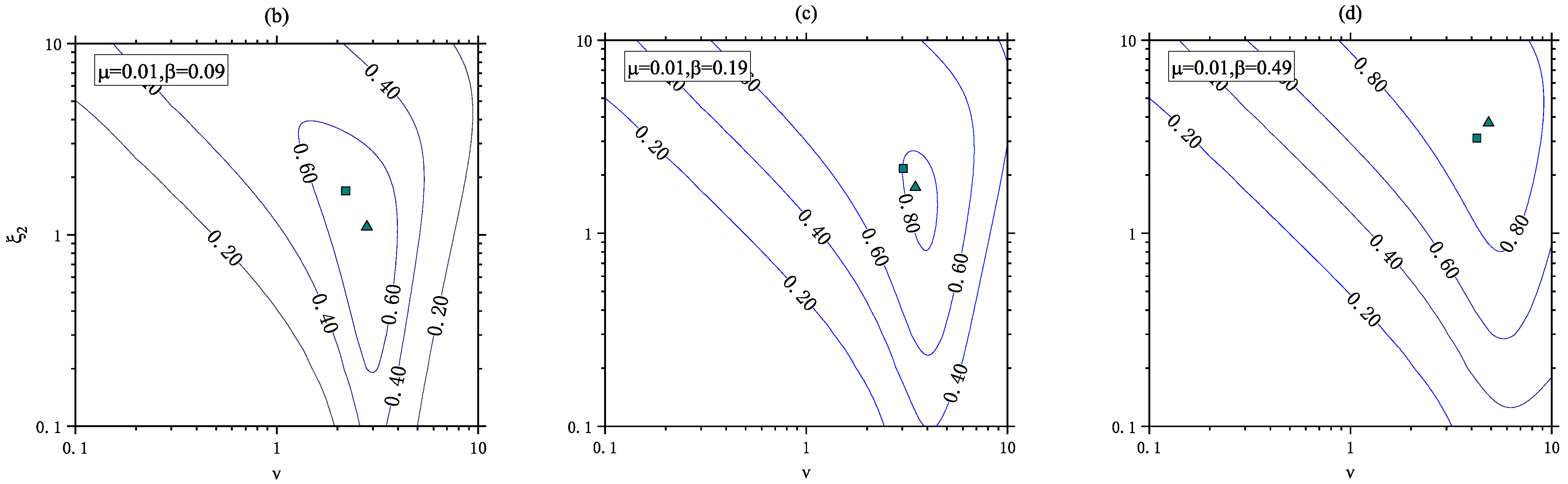
3. Optimal Design of TMDI
- (a)
- : Displacement variance of the beam structure.
- (b)
- : Energy dissipation index (EDI)
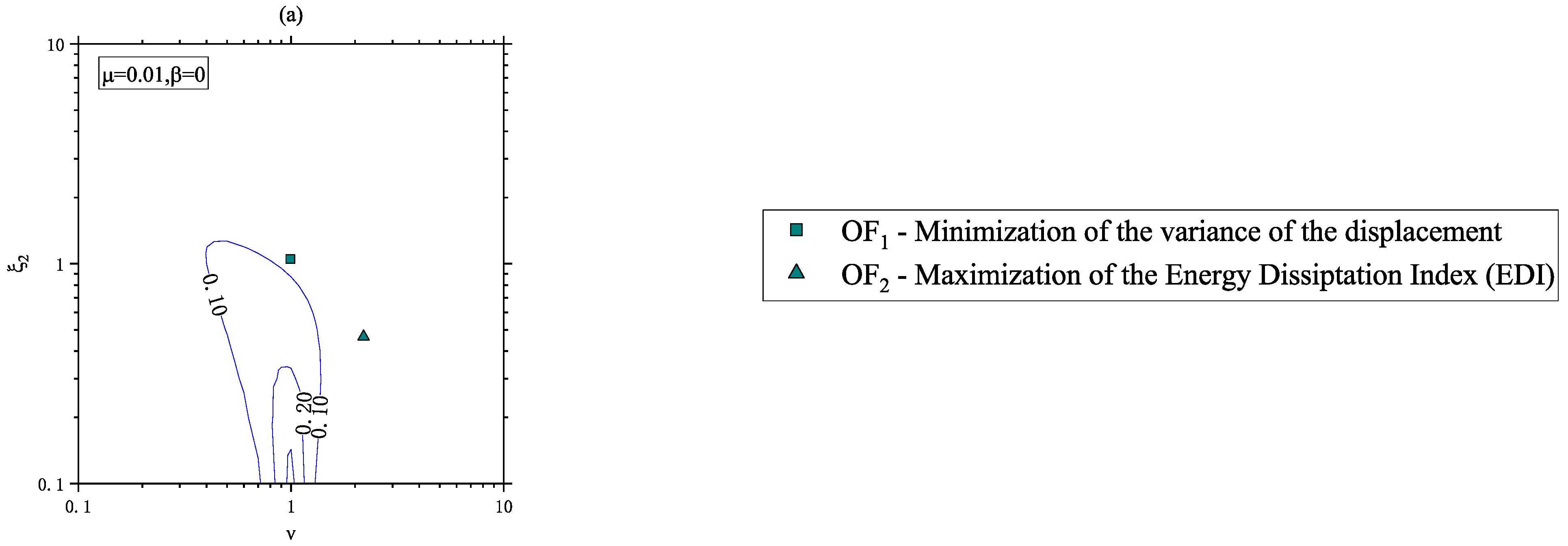
3.1. Minimization of the Displacement Variance of the Beam
3.2. Maximization of the Energy Dissipation Index (EDI)
4. Discussion of the Optimization Design Results
4.1. Comparison of Different Design Methods
4.2. Performance Evaluation of the TMDI
4.3. Sensitivity Analysis of the Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yu, H.; Xu, F.; Ma, C.; Zhou, A.; Zhang, M. Experimental Research on the Aerodynamic Responses of a Long-Span Pipeline Suspension Bridge. Eng. Struct. 2021, 245, 112856. [Google Scholar] [CrossRef]
- Ma, Z.; Xu, F.; Wang, M.; Zhang, M.; Zeng, H. Design, Fabrication, and Dynamic Testing of a Large-Scale Outdoor Aeroelastic Model of a Long-Span Cable-Stayed Bridge. Eng. Struct. 2022, 256, 114012. [Google Scholar] [CrossRef]
- Losanno, D.; Palumbo, F.; Calabrese, A.; Barrasso, T.; Vaiana, N. Preliminary Investigation of Aging Effects on Recycled Rubber Fiber Reinforced Bearings (RR-FRBs). J. Earthq. Eng. 2021, 1, 1–18. [Google Scholar] [CrossRef]
- Losanno, D.; De Domenico, D.; Madera-Sierra, I.E. Experimental Testing of Full-Scale Fiber Reinforced Elastomeric Isolators (FREIs) in Unbounded Configuration. Eng. Struct. 2022, 260, 114234. [Google Scholar] [CrossRef]
- Vaiana, N.; Marmo, F.; Sessa, S.; Rosati, L. Modeling of the Hysteretic Behavior of Wire Rope Isolators Using a Novel Rate-Independent Model. In Nonlinear Dynamics of Structures, Systems and Devices; Lacarbonara, W., Balachandran, B., Ma, J., Tenreiro Machado, J., Stepan, G., Eds.; Springer: Cham, Switzerland, 2020; pp. 309–317. [Google Scholar] [CrossRef]
- Soong, T.T.; Spencer, B.F. Supplemental Energy Dissipation: State-of-the-Art and State-of-the-Practice. Eng. Struct. 2002, 24, 243–259. [Google Scholar] [CrossRef]
- Bernuzzi, C.; Crespi, P.; Montuori, R.; Nastri, E.; Simoncelli, M.; Stochino, F.; Zucca, M. Resonance of Steel Wind Turbines: Problems and Solutions. Structures 2021, 32, 65–75. [Google Scholar] [CrossRef]
- Housner, G.; Bergman, L.; Caughey, T.; Chassiakos, A.G.; Claus, R.O.; Masri, S.F.; Skelton, R.E.; Soong, T.T.; Spencer, B.F.; Yao, J.T.P. Structural Control: Past, Present, and Future. J. Eng. Mech. 1997, 123, 897–971. [Google Scholar] [CrossRef]
- Khodaie, N. Vibration Control of Super-Tall Buildings Using Combination of Tapering Method and TMD System. J. Wind. Eng. Ind. Aerodyn. 2020, 196, 104031. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, K.; Mercan, O.; Chen, H.; Tan, P. Experimental and Numerical Studies on the Optimal Design of Tuned Mass Dampers for Vibration Control of High-Rise Structures. Eng. Struct. 2020, 211, 110486. [Google Scholar] [CrossRef]
- Liu, X.; Wang, W.; Fang, C. Seismic Vibration Control of Novel Prefabricated Industrial Equipment Suspension Structures with Tuned Mass Damper. J. Constr. Steel Res. 2022, 191, 107163. [Google Scholar] [CrossRef]
- Domizio, M.; Garrido, H.; Ambrosini, D. Single and Multiple TMD Optimization to Control Seismic Response of Nonlinear Structures. Eng. Struct. 2022, 252, 113667. [Google Scholar] [CrossRef]
- Hosseini Lavassani, S.H.; Shangapour, S.; Homami, P.; Gharehbaghi, V.; Farsangi, E.N.; Yang, T. An Innovative Methodology for Hybrid Vibration Control (MR+TMD) of Buildings under Seismic Excitations. Soil Dyn. Earthq. Eng. 2022, 155, 107175. [Google Scholar] [CrossRef]
- Li, S.; Gao, W.; Yurchenko, D.; Wang, X.; Wang, J.; Liu, X. Novel Spacer-Tuned-Mass-Damper System for Controlling Vibrations of Hangers. Mech. Syst. Signal Process. 2022, 167, 108537. [Google Scholar] [CrossRef]
- Li, P.; Zhu, S.; Zhai, W.; Shi, G.; He, Z.; Du, M. On the Safety Threshold of Trains Running on Sichuan-Tibet Railway Bridges under the Influence of Floating Ice. Veh. Syst. Dyn. 2022, 1–17. [Google Scholar] [CrossRef]
- Fang, X.; Hao, H.; Bi, K. Free and Forced Vibrations of an Undamped Double-Beam System Carrying a Tip Mass with Rotary Inertia Journal of Engineering Mechanics Vol 148, No 2[EB/OL]. Available online: https://ascelibrary.org/doi/full/10.1061/%28ASCE%29EM.1943-7889.0002056 (accessed on 25 April 2022).
- Zhang, M.; Xu, F. Tuned Mass Damper for Self-Excited Vibration Control: Optimization Involving Nonlinear Aeroelastic Effect. J. Wind. Eng. Ind. Aerodyn. 2022, 220, 104836. [Google Scholar] [CrossRef]
- Petrini, F.; Giaralis, A.; Wang, Z. Optimal Tuned Mass-Damper-Inerter (TMDI) Design in Wind-Excited Tall Buildings for Occupants’ Comfort Serviceability Performance and Energy Harvesting. Eng. Struct. 2020, 204, 109904. [Google Scholar] [CrossRef]
- Vaiana, N.; Sessa, S.; Rosati, L. A Generalized Class of Uniaxial Rate-Independent Models for Simulating Asymmetric Mechanical Hysteresis Phenomena. Mech. Syst. Signal Process. 2021, 146, 106984. [Google Scholar] [CrossRef]
- Vaiana, N.; Losanno, D.; Ravichandran, N. A Novel Family of Multiple Springs Models Suitable for Biaxial Rate-Independent Hysteretic Behavior. Comput. Struct. 2021, 244, 106403. [Google Scholar] [CrossRef]
- Smith, M.C. Synthesis of Mechanical Networks: The Inerter IEEE Journals & Magazine IEEE Xplore[EB/OL]. Available online: https://ieeexplore.ieee.org/document/1039800 (accessed on 21 February 2022).
- Ma, R.; Bi, K.; Hao, H. Inerter-Based Structural Vibration Control: A State-of-the-Art Review. Eng. Struct. 2021, 243, 112655. [Google Scholar] [CrossRef]
- Djerouni, S.; Elias, S.; Abdeddaim, M.; Rupakhety, R. Optimal Design and Performance Assessment of Multiple Tuned Mass Damper Inerters to Mitigate Seismic Pounding of Adjacent Buildings. J. Build. Eng. 2022, 48, 103994. [Google Scholar] [CrossRef]
- Shi, B.; Yang, J.; Jiang, J.Z. Tuning Methods for Tuned Inerter Dampers Coupled to Nonlinear Primary Systems. Nonlinear Dyn. 2022, 107, 1663–1685. [Google Scholar] [CrossRef]
- Wen, Y.; Gomez, F.; Li, D.; Spencer, B.F., Jr. Generalized Optimal Design of Multiple Tuned Inerter Dampers for Control of MDOF Structures under Stochastic Seismic Excitation. Struct. Control Health Monit. 2022, 29, e2853. [Google Scholar] [CrossRef]
- Xu, T.; Li, Y.; Lai, T.; Zheng, J. A Simplified Design Method of Tuned Inerter Damper for Damped Civil Structures: Theory, Validation, and Application. Struct. Control Health Monit. 2021, 28, e2798. [Google Scholar] [CrossRef]
- Su, N.; Xia, Y.; Peng, S. Filter-Based Inerter Location Dependence Analysis Approach of Tuned Mass Damper Inerter (TMDI) and Optimal Design. Eng. Struct. 2022, 250, 113459. [Google Scholar] [CrossRef]
- Zhang, Z.; Fitzgerald, B. Tuned Mass-Damper-Inerter (TMDI) for Suppressing Edgewise Vibrations of Wind Turbine Blades. Eng. Struct. 2020, 221, 110928. [Google Scholar] [CrossRef]
- De Angelis, M.; Petrini, F.; Pietrosanti, D. Optimal Design of the Ideal Grounded Tuned Mass Damper Inerter for Comfort Performances Improvement in Footbridges with Practical Implementation Considerations. Struct. Control Health Monit. 2021, 28, e2800. [Google Scholar] [CrossRef]
- Kaveh, A.; Fahimi Farzam, M.; Hojat Jalali, H.; Maroofiazar, R. Robust Optimum Design of a Tuned Mass Damper Inerter. Acta Mech. 2020, 231, 3871–3896. [Google Scholar] [CrossRef]
- Wang, Z.; Giaralis, A. Top-Story Softening for Enhanced Mitigation of Vortex Shedding-Induced Vibrations in Wind-Excited Tuned Mass Damper Inerter-Equipped Tall Buildings. J. Struct. Eng. 2021, 147, 04020283. [Google Scholar] [CrossRef]
- Djerouni, S.; Abdeddaim, M.; Ounis, A. Seismic Response Control of Adjacent Buildings Using Optimal Backward-Shared Tuned Mass Damper Inerter and Optimal Backward-Shared Tuned Inerter Damper. Asian J. Civ. Eng. 2021, 22, 1499–1523. [Google Scholar] [CrossRef]
- Pietrosanti, D.; De Angelis, M.; Giaralis, A. Experimental Seismic Performance Assessment and Numerical Modelling of Nonlinear Inerter Vibration Absorber (IVA)-Equipped Base Isolated Structures Tested on Shaking Table. Earthq. Eng. Struct. Dyn. 2021, 50, 2732–2753. [Google Scholar] [CrossRef]
- Kakou, P.; Barry, O. Simultaneous Vibration Reduction and Energy Harvesting of a Nonlinear Oscillator Using a Nonlinear Electromagnetic Vibration Absorber-Inerter. Mech. Syst. Signal Process. 2021, 156, 107607. [Google Scholar] [CrossRef]
- Crandall, S.H.; Mark, W.D. Random Vibration in Mechanical Systems; Academic Press: Cambridge, MA, USA, 2014. [Google Scholar]
- Lalanne, C. Random Vibration; CRC Press: Boca Raton, FL, USA, 2020. [Google Scholar] [CrossRef]
- Chopra, A.K. Dynamics of Structures; Pearson Education India: Noida, India, 2007. [Google Scholar]
- Soong, T.T.; Grigoriu, M. Random vibration of mechanical and structural systems. NASA STI/Recon Tech. Rep. A 1993, 93, 14690. [Google Scholar]
- Hu, J.Y.; Zeng, S.Y. Random Vibration; CRC Press: Boca Raton, FL, USA, 1989. [Google Scholar]
- Basili, M.; De Angelis, M. Optimal Passive Control of Adjacent Structures Interconnected with Nonlinear Hysteretic Devices. J. Sound Vib. 2007, 301, 106–125. [Google Scholar] [CrossRef]
- Basili, M.; De Angelis, M. A Reduced Order Model for Optimal Design of 2-Mdof Adjacent Structures Connected by Hysteretic Dampers. J. Sound Vib. 2007, 306, 297–317. [Google Scholar] [CrossRef]
- Ciampi, V.; De Angelis, M.; Paolacci, F. Design of Yielding or Friction-Based Dissipative Bracings for Seismic Protection of Buildings. Eng. Struct. 1995, 17, 381–391. [Google Scholar] [CrossRef]
- Reggio, A.; Angelis, M. Optimal Energy-Based Seismic Design of Non-Conventional Tuned Mass Damper (TMD) Implemented via Inter-Story Isolation. Earthq. Eng. Struct. Dyn. 2015, 44, 1623–1642. [Google Scholar] [CrossRef]
- De Domenico, D.; Ricciardi, G. An Enhanced Base Isolation System Equipped with Optimal Tuned Mass Damper Inerter (TMDI). Earthq. Eng. Struct. Dyn. 2018, 47, 1169–1192. [Google Scholar] [CrossRef]
- Pietrosanti, D.; De Angelis, M.; Basili, M. Optimal Design and Performance Evaluation of Systems with Tuned Mass Damper Inerter (TMDI). Earthq. Eng. Struct. Dyn. 2017, 46, 1367–1388. [Google Scholar] [CrossRef]
- Salvi, J.; Rizzi, E. Optimum Tuning of Tuned Mass Dampers for Frame Structures under Earthquake Excitation. Struct. Control. Health Monit. 2015, 22, 707–725. [Google Scholar] [CrossRef]
- Uang, C.-M.; Bertero, V.V. Use of Energy as a Design Criterion in Earthquake-Resistant Design: 18; Earthquake Engineering Research Center; University of California: Berkeley, CA, USA, 1988; p. 88. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Optimal Design | ||||
|---|---|---|---|---|---|
| μ | β | μe | Criteria | νopt | ξ2opt |
| 0.01 | 0 | 0.01 | OF1 | 0.9925 | 1.0514 |
| OF2 | 2.1915 | 0.4659 | |||
| 0.01 | 0.09 | 0.10 | OF1 | 2.2056 | 1.6508 |
| OF2 | 2.8794 | 1.0646 | |||
| 0.01 | 0.19 | 0.20 | OF1 | 3.0344 | 2.1604 |
| OF2 | 3.4812 | 1.7299 | |||
| 0.01 | 0.49 | 0.50 | OF1 | 4.4253 | 3.1101 |
| OF2 | 4.8598 | 3.7256 | |||
| Case | Primary Structure | Auxiliary Structure | ||||
|---|---|---|---|---|---|---|
| μ | β | μe | Criteria | EDI | ||
| 0.01 | 0 | 0.01 | OF1 | 0.8069 | 1.5079 | 0.0455 |
| OF2 | 0.9472 | 1.4093 | 0.0993 | |||
| 0.01 | 0.09 | 0.10 | OF1 | 0.1887 | 1.4738 | 0.6819 |
| OF2 | 0.173 | 1.3991 | 0.7053 | |||
| 0.01 | 0.19 | 0.20 | OF1 | 0.1211 | 0.9536 | 0.8012 |
| OF2 | 0.1168 | 0.9066 | 0.8604 | |||
| 0.01 | 0.49 | 0.50 | OF1 | 0.0719 | 0.3312 | 0.8922 |
| OF2 | 0.079 | 0.3235 | 0.9009 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bian, Y.; Liu, X.; Sun, Y.; Zhong, Y. Optimized Design of a Tuned Mass Damper Inerter (TMDI) Applied to Circular Section Members of Transmission Towers. Buildings 2022, 12, 1154. https://doi.org/10.3390/buildings12081154
Bian Y, Liu X, Sun Y, Zhong Y. Optimized Design of a Tuned Mass Damper Inerter (TMDI) Applied to Circular Section Members of Transmission Towers. Buildings. 2022; 12(8):1154. https://doi.org/10.3390/buildings12081154
Chicago/Turabian StyleBian, Yongfei, Xinpeng Liu, Yi Sun, and Yongli Zhong. 2022. "Optimized Design of a Tuned Mass Damper Inerter (TMDI) Applied to Circular Section Members of Transmission Towers" Buildings 12, no. 8: 1154. https://doi.org/10.3390/buildings12081154