
Automated Computer Vision-Based Construction Progress Monitoring: A Systematic Review




Abstract
:1. Introduction
- Identify the CV-based CPM process, key sub-processes, and enabling techniques for process automation.
- Discuss the effectiveness and level of automation provided by the identified techniques for CV-based CPM.
- Discuss the identified CV-based CPM process in comparison with the traditional techniques to understand the industry requirements and highlight key challenges.
2. Materials and Methods
2.1. Literature Retrieval
2.2. Systematic Literature Review Process
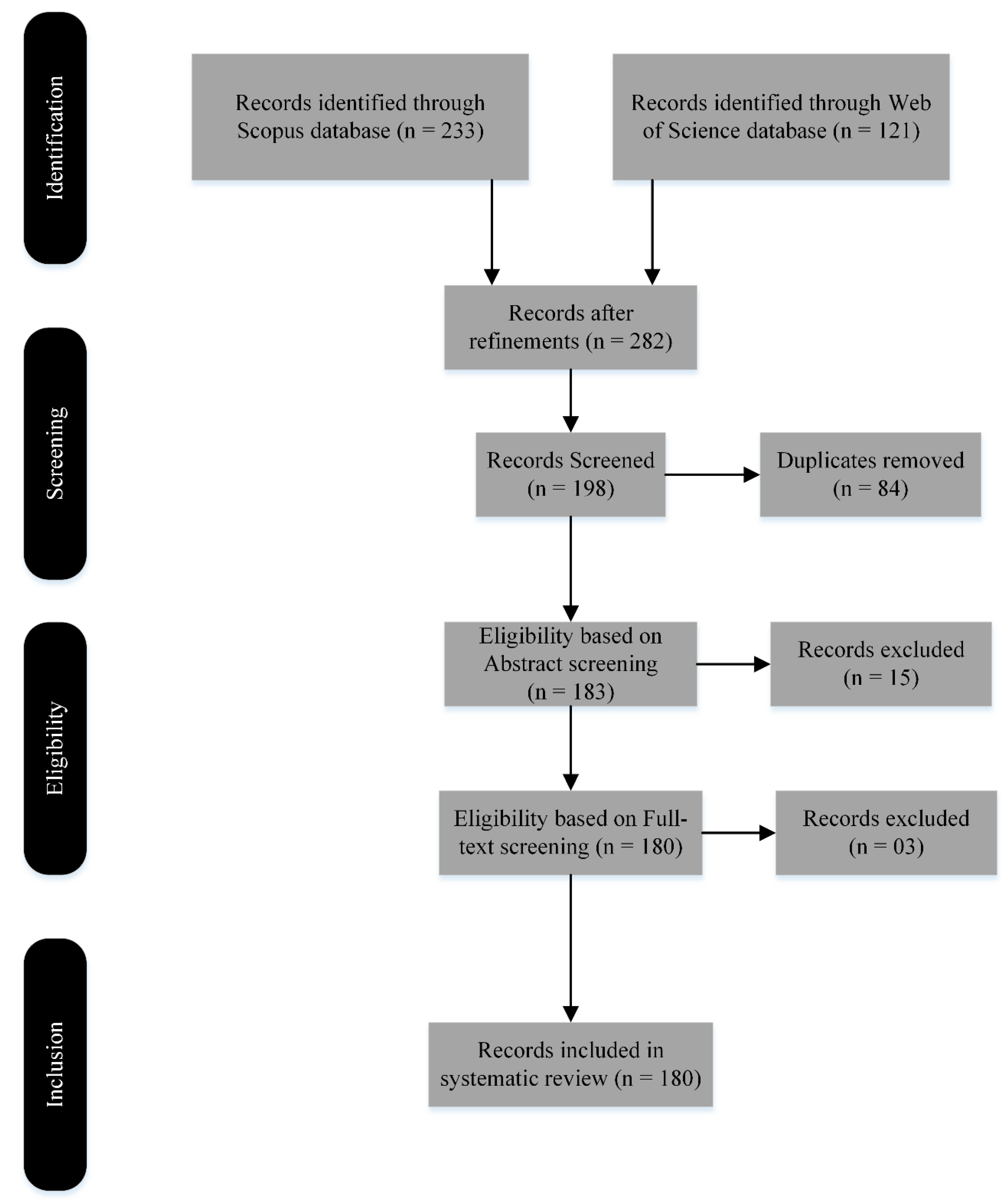
- Protocol and registration: This review aims at retrieving and reviewing literature from Scopus and WoS databases based on pre-defined keywords. Furthermore, the review is limited to the literature published from 2011 to 2021.
- Eligibility criteria: The literature with the pre-defined keywords present in its title, abstract, and keyword sections are selected.
- Information sources: Two renowned and reliable research databases, i.e., Scopus (scopus.com/search/form.uri?display=basic#basic, 15 May 2022) and WoS (https://www.webofscience.com/wos/woscc/basic-search, 15 May 2022) are consulted for the literature search and retrieval. Both databases can be accessed using the provided links.
- Search: The complete search process including the limits used during the database search is presented in Table 1 of this manuscript.
- Study selection: The study selection process involves screening the pre-defined keywords, identifying and removing the duplicates, and a qualitative analysis based on abstract and full-text screening for prominent codes and themes.
- Data collection process: Relevant literature/data are collected by referring to the online scholarly databases, i.e., Scopus and WoS, using the most suitable pre-defined keywords.
- Definition for data extraction: One author performed the independent data extraction using pre-defined data fields and processes and by ensuring the quality indicators.
- Risk of bias and applicability: As the processes are not ranked or subjectively assessed, the risk of bias in individual studies affecting this systematic review is not applicable.
- Diagnostic accuracy measures: Since no test is being applied and tested in this systematic review, the diagnostic accuracy measure does not apply to this research.
- Synthesis of results: The collected information is properly analyzed and summarized into relevant categories to understand the evidence present. The results are also compared to other research studies for consistency of the findings.
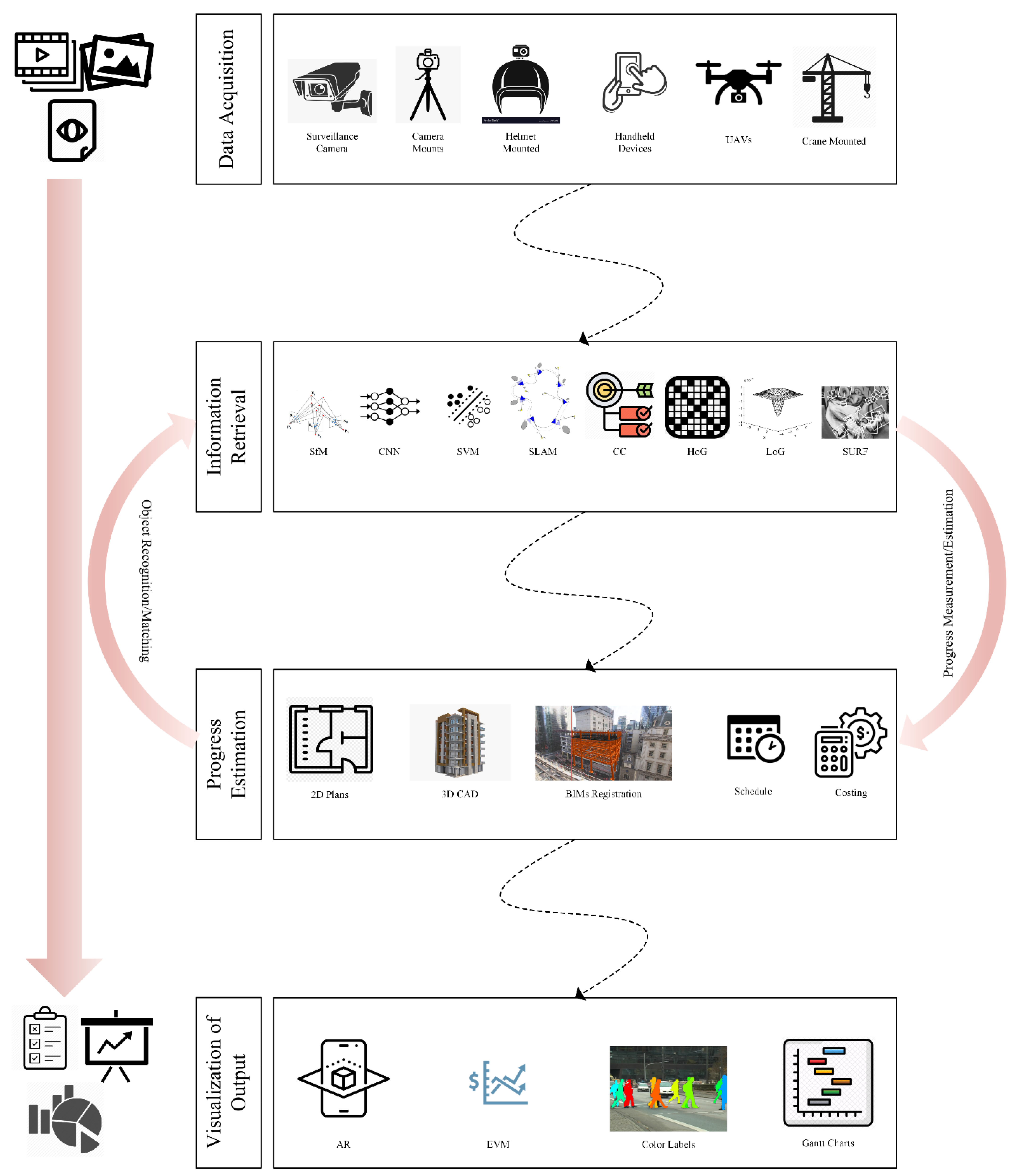
3. Assessment of the CV-Based CPM Process
3.1. DAQ
3.1.1. Unmanned Aerial Vehicles (UAVs)
3.1.2. Handheld Devices
3.1.3. Fixed on Mounts
3.1.4. Surveillance Cameras
3.2. Information Retrieval
3.2.1. Structure from Motion (SfM)
3.2.2. Convolutional Neural Network (CNN)
3.2.3. Support Vector Machines (SVM)
3.2.4. Simultaneous Localization and Mapping (SLAM)
3.2.5. Cascading Classifiers (CC)
3.2.6. Histogram of Oriented Gradients (HoG)
3.2.7. Laplacian of Gaussian (LoG)
3.2.8. Speeded-Up Robust Features (SURF)
3.3. Progress Estimation
3.3.1. Building Information Models (BIMs) Registration
3.3.2. Progress Estimation through Object Recognition/Matching
3.4. Output Visualization
3.4.1. Color Labels
3.4.2. Augmented Reality (AR) and Virtual Reality (VR)
3.4.3. Earned Value Management (EVM)
4. Discussion
4.1. DAQ
4.2. Information Retrieval
4.3. Progress Estimation
4.4. Output Visualization
5. Conclusions, Limitations, and Future Directions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CV | Computer Vision |
| CPM | Construction Progress Monitoring |
| DAQ | Data Acquisition |
| WoS | Web of Science |
| UAV | Unmanned Aerial Vehicle |
| SfM | Structure from Motion |
| CNN | Convolutional Neural Network |
| SVM | Support Vector Machines |
| SLAM | Simultaneously Localization and Mapping |
| CC | Cascading Classifiers |
| SURF | Speeded-Up Robust Features |
| LoG | Laplacian of Gaussian |
| HoG | Histogram of Oriented Gradients |
| BIMs | Building Information Models |
| AR | Augmented Reality |
| VR | Virtual Reality |
| EVM | Earned Value Management |
| CMT | Construction Management Teams |
| DPR | Daily Progress Report |
References
- Hegazy, T. Computer-Based Construction Project Management. Available online: https://www.pearson.ch/HigherEducation/Pearson/EAN/9781292027128/Computer-Based-Construction-Project-Management-Pearson-New-International-Edition (accessed on 14 October 2021).
- Son, H.; Bosché, F.; Kim, C. As-built data acquisition and its use in production monitoring and automated layout of civil infrastructure: A survey. Adv. Eng. Inform. 2015, 29, 172–183. [Google Scholar] [CrossRef]
- El-Sabek, L.M.; McCabe, B.Y. Coordination Challenges of Production Planning in the Construction of International Mega-Projects in The Middle East. Int. J. Constr. Educ. Res. 2017, 14, 118–140. [Google Scholar] [CrossRef]
- Navon, R.; Sacks, R. Assessing research issues in Automated Project Performance Control (APPC). Autom. Constr. 2007, 16, 474–484. [Google Scholar] [CrossRef]
- Wolfe, S., Jr. 2020 Construction Survey: Contractors Waste Time & Get Paid Slowly. Available online: https://www.levelset.com/blog/2020-report-construction-wasted-time-slow-payment/ (accessed on 5 April 2022).
- Manfren, M.; Tagliabue, L.C.; Cecconi, F.R.; Ricci, M. Long-Term Techno-Economic Performance Monitoring to Promote Built Environment Decarbonisation and Digital Transformation—A Case Study. Sustainability 2022, 14, 644. [Google Scholar] [CrossRef]
- Omar, T.; Nehdi, M.L. Data acquisition technologies for construction progress tracking. Autom. Constr. 2016, 70, 143–155. [Google Scholar] [CrossRef]
- El-Omari, S.; Moselhi, O. Data acquisition from construction sites for tracking purposes. Eng. Constr. Arch. Manag. 2009, 16, 490–503. [Google Scholar] [CrossRef]
- Cheng, T.; Mantripragada, U.; Teizer, J.; Vela, P.A. Automated Trajectory and Path Planning Analysis Based on Ultra Wideband Data. J. Comput. Civ. Eng. 2012, 26, 151–160. [Google Scholar] [CrossRef]
- Bosché, F.; Guillemet, A.; Turkan, Y.; Haas, C.T.; Haas, R. Tracking the Built Status of MEP Works: Assessing the Value of a Scan-vs-BIM System. J. Comput. Civ. Eng. 2014, 28, 05014004. [Google Scholar] [CrossRef] [Green Version]
- Ibrahim, Y.M.; Kaka, A.P.; Aouad, G.; Kagioglou, M. As-built Documentation of Construction Sequence by Integrating Virtual Reality with Time-lapse Movies. Arch. Eng. Des. Manag. 2008, 4, 73–84. [Google Scholar] [CrossRef]
- Bradski, G.; Kaehler, A. Learning OpenCV: Computer Vision with the OpenCV Library; O’Reilly Media, Inc.: Newton, MA, USA, 2008. [Google Scholar]
- Zhang, X.; Bakis, N.; Lukins, T.C.; Ibrahim, Y.M.; Wu, S.; Kagioglou, M.; Aouad, G.; Kaka, A.P.; Trucco, E. Automating progress measurement of construction projects. Autom. Constr. 2009, 18, 294–301. [Google Scholar] [CrossRef]
- Fisher, R.B.; Breckon, T.P.; Dawson-Howe, K.; Fitzgibbon, A.; Robertson, C.; Trucco, E.; Williams, C.K.; Williams, I. Dictionary of Computer Vision and Image Processing. In Dictionary of Computer Vision and Image Processing; John Wiley: New York, NY, USA, 2016. [Google Scholar] [CrossRef]
- Omar, H.; Mahdjoubi, L.; Kheder, G. Towards an automated photogrammetry-based approach for monitoring and controlling construction site activities. Comput. Ind. 2018, 98, 172–182. [Google Scholar] [CrossRef]
- Ekanayake, B.; Wong, J.K.-W.; Fini, A.A.F.; Smith, P. Computer vision-based interior construction progress monitoring: A literature review and future research directions. Autom. Constr. 2021, 127, 103705. [Google Scholar] [CrossRef]
- Kopsida, M.; Brilakis, I.; Vela, P. A Review of Automated Construction Progress and Inspection Methods. In Proceedings of the 32nd CIB W78 Conference on Construction IT, Tokyo, Japan, 27–29 January 2015; pp. 421–431. [Google Scholar]
- Fard, M.G.; Pena-Mora, F. Application of visualization techniques for construction progress monitoring. In Proceedings of the International Workshop on Computing in Civil Engineering 2007, Pittsburgh, PA, USA, 24–27 July 2007. [Google Scholar]
- Mahami, H.; Nasirzadeh, F.; Ahmadabadian, A.H.; Nahavandi, S. Automated Progress Controlling and Monitoring Using Daily Site Images and Building Information Modelling. Buildings 2019, 9, 70. [Google Scholar] [CrossRef] [Green Version]
- Hamledari, H.; Sajedi, S.; McCabe, B.; Fischer, M. Automation of Inspection Mission Planning Using 4D BIMs and in Support of Unmanned Aerial Vehicle–Based Data Collection. J. Constr. Eng. Manag. 2021, 147, 04020179. [Google Scholar] [CrossRef]
- Golparvar-Fard, M.; Peña-Mora, F.; Savarese, S. Monitoring of Construction Performance Using Daily Progress Photograph Logs and 4d As-Planned Models. In Proceedings of the 2009 ASCE International Workshop on Computing in Civil Engineering, Austin, TX, USA, 24–27 June 2009; Volume 346, pp. 53–63. [Google Scholar] [CrossRef]
- El-Omari, S.; Moselhi, O. Integrating 3D laser scanning and photogrammetry for progress measurement of construction work. Autom. Constr. 2008, 18, 1–9. [Google Scholar] [CrossRef]
- Chaiyasarn, K.; Kim, T.-K.; Viola, F.; Cipolla, R.; Soga, K. Distortion-Free Image Mosaicing for Tunnel Inspection Based on Robust Cylindrical Surface Estimation through Structure from Motion. J. Comput. Civ. Eng. 2016, 30, 04015045. [Google Scholar] [CrossRef]
- Wang, Q.; Kim, M. Applications of 3D point cloud data in the construction industry: A fifteen-year review from 2004 to 2018. Adv. Eng. Inform. 2019, 39, 306–319. [Google Scholar] [CrossRef]
- Turkan, Y.; Bosché, F.; Haas, C.T.; Haas, R. Toward Automated Earned Value Tracking Using 3D Imaging Tools. J. Constr. Eng. Manag. 2013, 139, 423–433. [Google Scholar] [CrossRef] [Green Version]
- Han, K.K.; Golparvar-Fard, M. Potential of big visual data and building information modeling for construction performance analytics: An exploratory study. Autom. Constr. 2017, 73, 184–198. [Google Scholar] [CrossRef] [Green Version]
- Teizer, J. Status quo and open challenges in vision-based sensing and tracking of temporary resources on infrastructure construction sites. Adv. Eng. Inform. 2015, 29, 225–238. [Google Scholar] [CrossRef]
- Álvares, J.S.; Costa, D.B. Literature Review on Visual Construction Progress Monitoring Using Unmanned Aerial Vehicles. In Proceedings of the 26th Annual Conference of the International Group for Lean Construction: Evolving Lean Construction Towards Mature Production Management Across Cultures and Frontiers, Chennai, India, 18–22 July 2018. [Google Scholar] [CrossRef] [Green Version]
- Dimitrov, A.; Golparvar-Fard, M. Vision-based material recognition for automated monitoring of construction progress and generating building information modeling from unordered site image collections. Adv. Eng. Inform. 2014, 28, 37–49. [Google Scholar] [CrossRef]
- Seong, H.; Choi, H.; Cho, H.; Lee, S.; Son, H.; Kim, C. Vision-Based Safety Vest Detection in a Construction Scene. In Proceedings of the 34th International Symposium on Automation and Robotics in Construction (ISARC 2017), Taipei, Taiwan, 28 June–1 July 2017. [Google Scholar]
- Braun, A.; Tuttas, S.; Borrmann, A.; Stilla, U. Improving progress monitoring by fusing point clouds, semantic data and computer vision. Autom. Constr. 2020, 116, 103210. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, Q.; Yang, B.; Wu, T.; Lei, K.; Zhang, B.; Fang, T. Vision-Based Framework for Automatic Progress Monitoring of Precast Walls by Using Surveillance Videos during the Construction Phase. J. Comput. Civ. Eng. 2021, 35, 04020056. [Google Scholar] [CrossRef]
- Borrmann, A.; Stilla, U. Automated Progress Monitoring Based on Photogrammetric Point Clouds and Precedence Relationship Graphs. In Proceedings of the 32nd ISARC, Oulu, Finland, 15–18 June 2015; pp. 1–7. [Google Scholar] [CrossRef] [Green Version]
- Kim, Y.; Nguyen, C.H.P.; Choi, Y. Automatic pipe and elbow recognition from three-dimensional point cloud model of industrial plant piping system using convolutional neural network-based primitive classification. Autom. Constr. 2020, 116, 103236. [Google Scholar] [CrossRef]
- Chen, J.; Fang, Y.; Cho, Y.K. Unsupervised Recognition of Volumetric Structural Components from Building Point Clouds. In Proceedings of the ASCE International Workshop on Computing in Civil Engineering 2017, Seattle, DC, USA, 25–27 June 2017. [Google Scholar] [CrossRef]
- Skibniewski, M.J. Construction Project Monitoring with Site Photographs and 4D Project Models. Organ. Technol. Manag. Constr. Int. J. 2014, 6, 1106–1114. [Google Scholar] [CrossRef]
- Roh, S.; Aziz, Z.; Peña-Mora, F. An object-based 3D walk-through model for interior construction progress monitoring. Autom. Constr. 2011, 20, 66–75. [Google Scholar] [CrossRef]
- Golparvar-Fard, M.; Bohn, J.; Teizer, J.; Savarese, S.; Peña-Mora, F. Evaluation of image-based modeling and laser scanning accuracy for emerging automated performance monitoring techniques. Autom. Constr. 2011, 20, 1143–1155. [Google Scholar] [CrossRef]
- Hui, L.; Brilakis, I. Real-Time Brick Counting for Construction Progress Monitoring. In Proceedings of the 2013 ASCE International Workshop on Computing in Civil Engineering, Los Angeles, CA, USA, 23–25 June 2013; pp. 818–824. [Google Scholar] [CrossRef]
- Hui, L.; Park, M.-W.; Brilakis, I. Automated Brick Counting for Façade Construction Progress Estimation. J. Comput. Civ. Eng. 2015, 29, 04014091. [Google Scholar] [CrossRef]
- Kim, C.; Kim, B.; Kim, H. 4D CAD model updating using image processing-based construction progress monitoring. Autom. Constr. 2013, 35, 44–52. [Google Scholar] [CrossRef]
- Lin, Z.; Petzold, F.; Ma, Z. A Real-Time 4D Augmented Reality System for Modular Construction Progress Monitoring. In Proceedings of the 36th International Symposium on Automation and Robotics in Construction, ISARC 2019, Banff Alberta, AB, Canada, 21–24 May 2019; pp. 743–748. [Google Scholar] [CrossRef]
- Ullah, F. A Beginner’s Guide to Developing Review-Based Conceptual Frameworks in the Built Environment. Architecture 2021, 1, 5–24. [Google Scholar] [CrossRef]
- Ullah, F.; Qayyum, S.; Thaheem, M.J.; Al-Turjman, F.; Sepasgozar, S.M. Risk management in sustainable smart cities governance: A TOE framework. Technol. Forecast. Soc. Chang. 2021, 167, 120743. [Google Scholar] [CrossRef]
- Haddaway, N.R.; Collins, A.; Coughlin, D.; Kirk, S. The Role of Google Scholar in Evidence Reviews and Its Applicability to Grey Literature Searching. PLoS ONE 2015, 10, e0138237. [Google Scholar] [CrossRef] [Green Version]
- Salameh, J.-P.; Bossuyt, P.M.; McGrath, T.A.; Thombs, B.D.; Hyde, C.J.; Macaskill, P.; Deeks, J.J.; Leeflang, M.; Korevaar, D.A.; Whiting, P.; et al. Preferred reporting items for systematic review and meta-analysis of diagnostic test accuracy studies (PRISMA-DTA): Explanation, elaboration, and checklist. BMJ 2020, 370, m2632. [Google Scholar] [CrossRef]
- Kim, C.; Son, H.; Kim, C. Automated construction progress measurement using a 4D building information model and 3D data. Autom. Constr. 2013, 31, 75–82. [Google Scholar] [CrossRef]
- Hwang, B.-G.; Zhao, X.; Ng, S.Y. Identifying the critical factors affecting schedule performance of public housing projects. Habitat Int. 2013, 38, 214–221. [Google Scholar] [CrossRef]
- Yang, J.; Park, M.-W.; Vela, P.A.; Golparvar-Fard, M. Construction performance monitoring via still images, time-lapse photos, and video streams: Now, tomorrow, and the future. Adv. Eng. Inform. 2015, 29, 211–224. [Google Scholar] [CrossRef]
- Zhang, C.; Arditi, D. Advanced Progress Control of Infrastructure Construction Projects Using Terrestrial Laser Scanning Technology. Infrastructures 2020, 5, 83. [Google Scholar] [CrossRef]
- Bohn, J.S.; Teizer, J. Benefits and Barriers of Construction Project Monitoring Using High-Resolution Automated Cameras. J. Constr. Eng. Manag. 2010, 136, 632–640. [Google Scholar] [CrossRef]
- Golparvar-Fard, M.; Peña-Mora, F.; Savarese, S. Integrated Sequential As-Built and As-Planned Representation with D4AR Tools in Support of Decision-Making Tasks in the AEC/FM Industry. J. Constr. Eng. Manag. 2011, 137, 1099–1116. [Google Scholar] [CrossRef]
- Elazouni, A.; Salem, O.A. Progress monitoring of construction projects using pattern recognition techniques. Constr. Manag. Econ. 2011, 29, 355–370. [Google Scholar] [CrossRef]
- Lukins, T.C.; Trucco, E. Towards Automated Visual Assessment of Progress in Construction Projects. In Proceedings of the British Machine Vision Conference, Warwick, UK, 10–13 September 2007. [Google Scholar] [CrossRef] [Green Version]
- Rebolj, D.; Babič, N.; Magdič, A.; Podbreznik, P.; Pšunder, M. Automated construction activity monitoring system. Adv. Eng. Inform. 2008, 22, 493–503. [Google Scholar] [CrossRef]
- Kim, H.; Kano, N. Comparison of construction photograph and VR image in construction progress. Autom. Constr. 2008, 17, 137–143. [Google Scholar] [CrossRef]
- Taj, G.; Anand, S.; Haneefi, A.; Kanishka, R.P.; Mythra, D. Monitoring of Historical Structures using Drones. IOP Conf. Ser. Mater. Sci. Eng. 2020, 955, 012008. [Google Scholar] [CrossRef]
- Ibrahim, A.; Golparvar-Fard, M.; El-Rayes, K. Metrics and methods for evaluating model-driven reality capture plans. Comput. Civ. Infrastruct. Eng. 2021, 37, 55–72. [Google Scholar] [CrossRef]
- Wu, Y.; Wang, M.; Liu, X.; Wang, Z.; Ma, T.; Xie, Y.; Li, X.; Wang, X. Construction of Stretching-Bending Sequential Pattern to Recognize Work Cycles for Earthmoving Excavator from Long Video Sequences. Sensors 2021, 21, 3427. [Google Scholar] [CrossRef]
- Shang, Z.; Shen, Z. Real-Time 3D Reconstruction on Construction Site Using Visual SLAM and UAV. arXiv 2015, 151, 10–17. [Google Scholar] [CrossRef] [Green Version]
- Shojaei, A.; Moud, H.I.; Flood, I. Proof of Concept for the Use of Small Unmanned Surface Vehicle in Built Environment Management. In Proceedings of the Construction Research Congress 2018: Construction Information Technology—Selected Papers from the Construction Research Congress, New Orleans, LA, USA; 2018; pp. 116–126. [Google Scholar] [CrossRef]
- Mahami, H.; Nasirzadeh, F.; Ahmadabadian, A.H.; Esmaeili, F.; Nahavandi, S. Imaging network design to improve the automated construction progress monitoring process. Constr. Innov. 2019, 19, 386–404. [Google Scholar] [CrossRef]
- Han, K.; Golparvar-Fard, M. Crowdsourcing BIM-guided collection of construction material library from site photologs. Vis. Eng. 2017, 5, 14. [Google Scholar] [CrossRef] [Green Version]
- Kielhauser, C.; Manzano, R.R.; Hoffman, J.J.; Adey, B.T. Automated Construction Progress and Quality Monitoring for Commercial Buildings with Unmanned Aerial Systems: An Application Study from Switzerland. Infrastructures 2020, 5, 98. [Google Scholar] [CrossRef]
- Braun, A.; Borrmann, A. Combining inverse photogrammetry and BIM for automated labeling of construction site images for machine learning. Autom. Constr. 2019, 106, 102879. [Google Scholar] [CrossRef]
- Jeon, S.; Hwang, J.; Kim, G.J.; Billinghurst, M. Interaction Techniques in Large Display Environments Using Hand-Held Devices. In Proceedings of the ACM Symposium on Virtual Reality Software and Technology, Limassol, Cyprus, 1–3 November 2006. [Google Scholar] [CrossRef]
- Son, H.; Kim, C.; Kim, C. Automated Color Model–Based Concrete Detection in Construction-Site Images by Using Machine Learning Algorithms. J. Comput. Civ. Eng. 2012, 26, 421–433. [Google Scholar] [CrossRef]
- Zhu, Z.; Ren, X.; Chen, Z. Integrated detection and tracking of workforce and equipment from construction jobsite videos. Autom. Constr. 2017, 81, 161–171. [Google Scholar] [CrossRef]
- Vick, S.; Brilakis, I. Road Design Layer Detection in Point Cloud Data for Construction Progress Monitoring. J. Comput. Civ. Eng. 2018, 32, 04018029. [Google Scholar] [CrossRef]
- Kim, P.; Chen, J.; Kim, J.; Cho, Y.K. SLAM-driven intelligent autonomous mobile robot navigation for construction applications. In Workshop of the European Group for Intelligent Computing in Engineering; Springer: Cham, Switzerland, 2018; pp. 254–269. [Google Scholar] [CrossRef]
- Gai, M.; Cho, Y.K.; Xu, Q. Target-Free Automatic Point Clouds Registration Using 2D Images. In Proceedings of the 2013 ASCE International Workshop on Computing in Civil Engineering, Los Angeles, CA, USA, 23–25 June 2013; pp. 865–872. [Google Scholar] [CrossRef]
- Son, H.; Kim, C. 3D structural component recognition and modeling method using color and 3D data for construction progress monitoring. Autom. Constr. 2010, 19, 844–854. [Google Scholar] [CrossRef]
- Golparvar-Fard, M.; Pena-Mora, F.; Savarese, S. Monitoring changes of 3D building elements from unordered photo collections. In Proceedings of the IEEE International Conference on Computer Vision, Washington, DC, USA, 6–13 November 2011; pp. 249–256. [Google Scholar] [CrossRef] [Green Version]
- Masood, M.K.; Aikala, A.; Seppänen, O.; Singh, V. Multi-Building Extraction and Alignment for As-Built Point Clouds: A Case Study With Crane Cameras. Front. Built Environ. 2020, 6, 581295. [Google Scholar] [CrossRef]
- Fini, A.A.F.; Maghrebi, M.; Forsythe, P.J.; Waller, T.S. Using existing site surveillance cameras to automatically measure the installation speed in prefabricated timber construction. Eng. Constr. Arch. Manag. 2021, 29, 573–600. [Google Scholar] [CrossRef]
- Braun, A.; Tuttas, S.; Stilla, U.; Brrmann, A. Incorporating Knowledge on Construction Methods into Automated Progress Monitoring Techniques. In Proceedings of the 23rd International Workshop of the European Group for Intelligent Computing in Engineering, Kraków, Poland, 29 June–1 July 2016. [Google Scholar]
- Karsch, K.; Golparvar-Fard, M.; Forsyth, D. ConstructAide: Analyzing and Visualizing Construction Sites through Photographs and Building Models. ACM Trans. Graph. 2014, 33, 176. [Google Scholar] [CrossRef]
- Han, K.K.; Golparvar-Fard, M. Appearance-based material classification for monitoring of operation-level construction progress using 4D BIM and site photologs. Autom. Constr. 2015, 53, 44–57. [Google Scholar] [CrossRef]
- Bunrit, S.; Kerdprasop, N.; Kerdprasop, K. Evaluating on the Transfer Learning of CNN Architectures to a Construction Material Image Classification Task. Int. J. Mach. Learn. Comput. 2019, 9, 201–207. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Kira, Z.; Cho, Y.K. Deep Learning Approach to Point Cloud Scene Understanding for Automated Scan to 3D Reconstruction. J. Comput. Civ. Eng. 2019, 33, 04019027. [Google Scholar] [CrossRef]
- Memarzadeh, M.; Heydarian, A.; Golparvar-Fard, M.; Niebles, J.C. Real-Time and Automated Recognition and 2D Tracking of Construction Workers and Equipment from Site Video Streams. In Proceedings of the ASCE International Conference on Computing in Civil Engineering, Atlanta, GA, USA, 17–19 June 2012; pp. 429–436. [Google Scholar] [CrossRef]
- Kropp, C.; Koch, C.; König, M. Drywall State Detection in Image Data for Automatic Indoor Progress Monitoring. In Proceedings of the 2014 International Conference on Computing in Civil and Building Engineering, Orlando, FL, USA, 23–25 June 2014; pp. 347–354. [Google Scholar] [CrossRef] [Green Version]
- Azar, E.R.; McCabe, B. Automated Visual Recognition of Dump Trucks in Construction Videos. J. Comput. Civ. Eng. 2012, 26, 769–781. [Google Scholar] [CrossRef]
- Bosché, F. Plane-based registration of construction laser scans with 3D/4D building models. Adv. Eng. Inform. 2012, 26, 90–102. [Google Scholar] [CrossRef]
- Bueno, M.; Bosché, F.; González-Jorge, H.; Martínez-Sánchez, J.; Arias, P. 4-Plane congruent sets for automatic registration of as-is 3D point clouds with 3D BIM models. Autom. Constr. 2018, 89, 120–134. [Google Scholar] [CrossRef]
- Golparvar-Fard, M.; Peña-Mora, F.; Savarese, S. Automated Progress Monitoring Using Unordered Daily Construction Photographs and IFC-Based Building Information Models. J. Comput. Civ. Eng. 2015, 29, 04014025. [Google Scholar] [CrossRef]
- Shahi, A.; Safa, M.; Haas, C.T.; West, J.S. Data Fusion Process Management for Automated Construction Progress Estimation. J. Comput. Civ. Eng. 2015, 29, 04014098. [Google Scholar] [CrossRef]
- Atkinson, R. Project management: Cost, time and quality, two best guesses and a phenomenon, its time to accept other success criteria. Int. J. Proj. Manag. 1999, 17, 337–342. [Google Scholar] [CrossRef]
- Hwang, N.; Son, H.; Kim, C. Is Color an Intrinsic Property of Construction Object’s Representation? Evaluating Color-Based Models to Detect Objects by Using Data Mining Techniques. In Proceedings of the 29th International Symposium of Automation and Robotics in Construction, Eindhoven, The Netherlands, 26–29 June 2012. [Google Scholar] [CrossRef] [Green Version]
- Hamledari, H.; McCabe, B. Automated Visual Recognition of Indoor Project-Related Objects: Challenges and Solutions. In Proceedings of the 2016 Construction Research Congress, San Juan, Puerto Rico, 31 May–2 June 2016; pp. 2573–2582. [Google Scholar] [CrossRef]
- Tuttas, S.; Braun, A.; Borrmann, A.; Stilla, U. Evaluation of Acquisition Strategies for Image-Based Construc-tion Site Monitoring. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences (ISPRS-2016), Prague, Czech Republic, 12–19 July 2016; Copernicus Publications on behalf of ISPRS: Prague, Czech Republic, 2016. [Google Scholar] [CrossRef]
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- de Melo, R.R.S.; Costa, D.B.; Álvares, J.S.; Irizarry, J. Applicability of unmanned aerial system (UAS) for safety inspection on construction sites. Saf. Sci. 2017, 98, 174–185. [Google Scholar] [CrossRef]
- Gheisari, M.; Esmaeili, B. Unmanned Aerial Systems (UAS) for Construction Safety Applications. Construction Research Congress 2016: Old and New Construction Technologies Converge in Historic San Juan. In Proceedings of the 2016 Construction Research Congress, CRC, San Juan, Puerto Rico, 31 May–2 June 2016; pp. 2642–2650. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef] [Green Version]
- Han, K.; Degol, J.; Golparvar-Fard, M. Geometry- and Appearance-Based Reasoning of Construction Progress Monitoring. J. Constr. Eng. Manag. 2018, 144, 04017110. [Google Scholar] [CrossRef] [Green Version]
- McCabe, B.Y.; Hamledari, H.; Shahi, A.; Zangeneh, P.; Azar, E.R. Roles, Benefits, and Challenges of Using UAVs for Indoor Smart Construction Applications. In Proceedings of the Congress on Computing in Civil Engineering, Seattle, Washington, DC, USA, 25–27 June 2017. [Google Scholar]
- Mostafa, K.; Hegazy, T. Review of image-based analysis and applications in construction. Autom. Constr. 2020, 122, 103516. [Google Scholar] [CrossRef]
- Liu, C.; Tang, C.-S.; Shi, B.; Suo, W.-B. Automatic quantification of crack patterns by image processing. Comput. Geosci. 2013, 57, 77–80. [Google Scholar] [CrossRef]
- Messinger, M.; Silman, M. Unmanned aerial vehicles for the assessment and monitoring of environmental contamination: An example from coal ash spills. Environ. Pollut. 2016, 218, 889–894. [Google Scholar] [CrossRef] [PubMed]
- Shin, H.-C.; Roth, H.R.; Gao, M.; Lu, L.; Xu, Z.; Nogues, I.; Yao, J.; Mollura, D.; Summers, R.M. Deep Convolutional Neural Networks for Computer-Aided Detection: CNN Architectures, Dataset Characteristics and Transfer Learning. IEEE Trans. Med. Imaging 2016, 35, 1285–1298. [Google Scholar] [CrossRef] [Green Version]
- Albawi, S.; Mohammed, T.A.; Al-Zawi, S. Understanding of a convolutional neural network. In Proceedings of the 2017 International Conference on Engineering and Technology (ICET), Antalya, Turkey, 21–23 August 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Choi, S.; Myeong, W.; Jeong, Y.; Myung, H.; Choi, S.; Myeong, W.; Jeong, Y.; Myung, H. Vision-Based Hybrid 6-DOF Displacement Estimation for Precast Concrete Member Assembly. Smart Struct. Syst. 2017, 20, 397. [Google Scholar] [CrossRef]
- Fang, W.; Zhong, B.; Zhao, N.; Love, P.E.; Luo, H.; Xue, J.; Xu, S. A deep learning-based approach for mitigating falls from height with computer vision: Convolutional neural network. Adv. Eng. Inform. 2019, 39, 170–177. [Google Scholar] [CrossRef]
- Luo, X.; Li, H.; Cao, D.; Dai, F.; Seo, J.; Lee, S. Recognizing Diverse Construction Activities in Site Images via Relevance Networks of Construction-Related Objects Detected by Convolutional Neural Networks. J. Comput. Civ. Eng. 2018, 32, 04018012. [Google Scholar] [CrossRef]
- Park, M.-W.; Makhmalbaf, A.; Brilakis, I. Comparative study of vision tracking methods for tracking of construction site resources. Autom. Constr. 2011, 20, 905–915. [Google Scholar] [CrossRef]
- Bügler, M.; Borrmann, A.; Ogunmakin, G.; Vela, P.A.; Teizer, J. Fusion of Photogrammetry and Video Analysis for Productivity Assessment of Earthwork Processes. Comput. Civ. Infrastruct. Eng. 2016, 32, 107–123. [Google Scholar] [CrossRef]
- Brilakis, I.; Soibelman, L.; Shinagawa, Y. Material-Based Construction Site Image Retrieval. J. Comput. Civ. Eng. 2005, 19, 341–355. [Google Scholar] [CrossRef]
- Harichandran, A.; Raphael, B.; Varghese, B.R.A.K. Inferring Construction Activities from Structural Responses Using Support Vector Machines. In Proceedings of the International Symposium on Automation and Robotics in Construction, Berlin, Germany, 20–25 July 2018; pp. 1–8. [Google Scholar]
- Caputo, B.; Hayman, E.; Fritz, M.; Eklundh, J.-O. Classifying materials in the real world. Image Vis. Comput. 2010, 28, 150–163. [Google Scholar] [CrossRef] [Green Version]
- Bailey, T.; Durrant-Whyte, H. Simultaneous localization and mapping (SLAM): Part II. IEEE Robot. Autom. Mag. 2006, 13, 108–117. [Google Scholar] [CrossRef] [Green Version]
- Peker, M.; Altun, H.; Karakaya, F. Hardware emulation of HOG and AMDF based scale and rotation invariant robust shape detection. In Proceedings of the International Conference on Engineering and Technology, ICET 2012–Conference Booklet, Caire, Egypt, 10–11 October 2012. [Google Scholar] [CrossRef]
- Dalal, N.; Triggs, B. Histograms of Oriented Gradients for Human Detection. In Proceedings of the Computer Vision and Pattern Recognition, San Diego, CA, USA, 20–26 June 2005; pp. 886–893. [Google Scholar] [CrossRef] [Green Version]
- Herbert, B.; Andreas, E.; Tinne, T.; Luc, V.G. Speeded-up robust features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Azhar, S. Building Information Modeling (BIM): Trends, Benefits, Risks, and Challenges for the AEC Industry. Leadersh. Manag. Eng. 2011, 11, 241–252. [Google Scholar] [CrossRef]
- Rehman, M.S.U.; Thaheem, M.J.; Nasir, A.R.; Khan, K.I.A. Project schedule risk management through building information modelling. Int. J. Constr. Manag. 2020, 22, 1489–1499. [Google Scholar] [CrossRef]
- Kropp, C.; Koch, C.; König, M. Interior construction state recognition with 4D BIM registered image sequences. Autom. Constr. 2018, 86, 11–32. [Google Scholar] [CrossRef]
- Asadi, K.; Ramshankar, H.; Noghabaei, M.; Han, K. Real-Time Image Localization and Registration with BIM Using Perspective Alignment for Indoor Monitoring of Construction. J. Comput. Civ. Eng. 2019, 33, 04019031. [Google Scholar] [CrossRef]
- Wang, Q.; Kim, M.-K.; Cheng, J.C.; Sohn, H. Automated quality assessment of precast concrete elements with geometry irregularities using terrestrial laser scanning. Autom. Constr. 2016, 68, 170–182. [Google Scholar] [CrossRef]
- Kim, C.; Son, H.; Kim, C. Fully automated registration of 3D data to a 3D CAD model for project progress monitoring. Autom. Constr. 2013, 35, 587–594. [Google Scholar] [CrossRef]
- Deng, H.; Hong, H.; Luo, D.; Deng, Y.; Su, C. Automatic Indoor Construction Process Monitoring for Tiles Based on BIM and Computer Vision. J. Constr. Eng. Manag. 2020, 146, 04019095. [Google Scholar] [CrossRef]
- Zhang, C.; Arditi, D. Automated progress control using laser scanning technology. Autom. Constr. 2013, 36, 108–116. [Google Scholar] [CrossRef]
- Xu, Y.; Shen, X.; Lim, S. CorDet: Corner-Aware 3D Object Detection Networks for Automated Scan-to-BIM. J. Comput. Civ. Eng. 2021, 35, 04021002. [Google Scholar] [CrossRef]
- Wang, X.; Dunston, P.S. Design, Strategies, and Issues towards an Augmented Reality-Based Construction Training Platform. Electron. J. Inf. Technol. Constr. 2007, 12, 363–380. [Google Scholar]
- Casini, M. Extended Reality for Smart Building Operation and Maintenance: A Review. Energies 2022, 15, 3785. [Google Scholar] [CrossRef]
- Kim, E.; Wells, W.G.; Duffey, M.R. A model for effective implementation of Earned Value Management methodology. Int. J. Proj. Manag. 2003, 21, 375–382. [Google Scholar] [CrossRef]
- Bannerman, P.L. Defining Project Success: A Multilevel Framework. In Proceedings of the Project Management, Warsaw, Poland, 13 June 2008. [Google Scholar]
- Hegazy, T.; Abdel-Monem, M. Email-based system for documenting construction as-built details. Autom. Constr. 2012, 24, 130–137. [Google Scholar] [CrossRef]
- Gheisari, M.; Esmaeili, B. Applications and requirements of unmanned aerial systems (UASs) for construction safety. Saf. Sci. 2019, 118, 230–240. [Google Scholar] [CrossRef]
- Liu, D.; Li, X.; Chen, J.; Jin, R. Real-Time Optimization of Precast Concrete Component Transportation and Storage. Adv. Civ. Eng. 2020, 2020, 1–18. [Google Scholar] [CrossRef]
- Li, N.; Calis, G.; Becerik-Gerber, B. Measuring and monitoring occupancy with an RFID based system for demand-driven HVAC operations. Autom. Constr. 2012, 24, 89–99. [Google Scholar] [CrossRef]
- Gang, L.; Peng, Z.; Shu-Hong, S. Research on Real-time Control of Construction Progress. IOP Conf. Ser. Earth Environ. Sci. 2019, 376, 012010. [Google Scholar] [CrossRef]
- Kastor, A.; Sirakoulis, K. The effectiveness of resource levelling tools for Resource Constraint Project Scheduling Problem. Int. J. Proj. Manag. 2009, 27, 493–500. [Google Scholar] [CrossRef]
- Gharaibeh, H. Evaluating Project Management Software Packages Using a Scoring Model—A Comparison between MS Project and Primavera. J. Softw. Eng. Appl. 2014, 7, 541–554. [Google Scholar] [CrossRef] [Green Version]
- Braun, A.; Tuttas, S.; Stilla, U.; Borrmann, A. BIM-Based Progress Monitoring. In Building Information Modeling; Springer International Publishing: Cham, Switzerland, 2018; pp. 463–476. [Google Scholar] [CrossRef]
- Tserng, H.-P.; Ho, S.-P.; Jan, S.-H. Developing Bim-Assisted as-Built Schedule Management System for General Contractors. J. Civ. Eng. Manag. 2014, 20, 47–58. [Google Scholar] [CrossRef] [Green Version]
- Getuli, V.; Ventura, S.M.; Capone, P.; Ciribini, A.L. A BIM-based Construction Supply Chain Framework for Monitoring Progress and Coordination of Site Activities. Procedia Eng. 2016, 164, 542–549. [Google Scholar] [CrossRef]
- Salehi, S.A.; Yitmen, I. Modeling and analysis of the impact of BIM-based field data capturing technologies on automated construction progress monitoring. Int. J. Civ. Eng. 2018, 16, 1669–1685. [Google Scholar] [CrossRef]
- Vidalakis, C.; Abanda, F.H.; Oti, A.H. BIM adoption and implementation: Focusing on SMEs. Constr. Innov. 2019, 20, 128–147. [Google Scholar] [CrossRef]
- Assaad, R.; El-Adaway, I.H.; El Hakea, A.H.; Parker, M.J.; Henderson, T.I.; Salvo, C.R.; Ahmed, M.O. Contractual Perspective for BIM Utilization in US Construction Projects. J. Constr. Eng. Manag. 2020, 146, 04020128. [Google Scholar] [CrossRef]
- Memon, Z.A.; Majid, M.Z.A.; Mustaffar, M. An Automatic Project Progress Monitoring Model by Integrating Auto CAD and Digital Photos. In Proceedings of the International Conference on Computing in Civil Engineering, Cancun, Mexico, 12–15 July 2005; pp. 1–13. [Google Scholar]
- Abramova, V.; Pires, F.; Bernardino, J. Open Source vs. Proprietary Project Management Tools. Adv. Intell. Syst. Comput. 2016, 444, 331–340. [Google Scholar] [CrossRef]
- Delgado, J.M.D.; Oyedele, L.; Demian, P.; Beach, T. A research agenda for augmented and virtual reality in architecture, engineering and construction. Adv. Eng. Inform. 2020, 45, 101122. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
| Database | Strings and Refinements | Results |
|---|---|---|
| Scopus | (TITLE-ABS-KEY (“computer vision” AND “construction progress*”) OR TITLE-ABS-KEY (“vision-based” AND “construction progress*”) OR TITLE-ABS-KEY (“real-time” AND “construction progress*”) OR TITLE-ABS-KEY (“automat*” AND “construction progress*”)) | 233 |
| AND (LIMIT-TO (SUBJAREA, “ENGI”) OR LIMIT-TO (SUBJAREA, “COMP”) | 195 | |
| AND (LIMIT-TO (DOCTYPE, “cp”) OR LIMIT-TO (DOCTYPE, “ar”) OR LIMIT-TO (DOCTYPE, “cr”) OR LIMIT-TO (DOCTYPE, “re”) OR LIMIT-TO (DOCTYPE, “ch”) | 194 | |
| AND (LIMIT-TO (LANGUAGE, “English”)AND (LIMIT-TO (PUBYEAR, “2011–2021”) | 180 180 | |
| Web of Science | TOPIC: (“computer vision” AND “construction progress*”) OR TOPIC: (“vision-based” AND “construction progress*”) OR TOPIC: (“real-time” AND “construction progress*”) OR TOPIC: (“automat*” AND “construction progress*”) | 121 |
| Refined by: RESEARCH AREAS: (ENGINEERING OR COMPUTER SCIENCE) | 103 | |
| Refined by: DOCUMENT TYPES: (ARTICLE OR PROCEEDINGS PAPER OR REVIEW OR BOOK CHAPTER) | 103 | |
| Refined by: LANGUAGES: (ENGLISH)Refined by: PUBLICATION YEARS: 2011–2021 | 102 102 | |
| Total Articles | 282 | |
| Duplicates | 84 | |
| After Abstract Screening | 183 | |
| After Full-text Screening | 180 | |
| Total Selected Articles | 180 |
| Sub-Processes | Techniques | Advantages | Limitations | References |
|---|---|---|---|---|
| DAQ | UAVs |
|
| [20,31,57,58,59,60,61,62,63,64,65] |
| Handheld devices |
|
| [19,33,37,39,40,66,67,68,69] | |
| Fixed on mounts |
|
| [33,41,70,71,72,73,74] | |
| Surveillance cameras |
|
| [32,59,75] | |
| Information retrieval | SfM |
|
| [19,31,33,62,63,73,76,77,78] |
| CNN |
|
| [28,32,59,65,79,80] | |
| SVM |
|
| [29,47,67,68,73,81,82] | |
| SLAM |
|
| [60,70] | |
| CC |
|
| [37,59] | |
| SURF |
|
| [71,74] | |
| LoG |
|
| [39,40] | |
| HoG |
|
| [81,83] | |
| Progress Estimation | BIMs registration |
|
| [33,74,84,85] |
| Object recognition/matching |
|
| [32,59,73,79,80,86] | |
| Output Visualization | Color labels |
|
| [31,39,63,65,68,73,78,82] |
| AR and VR |
|
| [37,42] | |
| EVM |
|
| [16,25,87] |
| Technique | Purpose | Level of Automation | ||
|---|---|---|---|---|
| Manual | Semi-Automated | Fully Automated | ||
| Unmanned Aerial Vehicles (UAVs) | Provides efficient, accurate, and quick access to vision datasets from human-inaccessible places. | [31,60,61,62,63] | [57,64,65] | [20,58,69] |
| Handheld Devices | Provides a large vision dataset without the need for technical complexity, designated equipment, and the need for multiple visual sensors. | [19,33,37,39,40,67,68,77,78,82] | - | - |
| Fixed on Mounts | Provides accurate and effective vision dataset from short or long-term observation of a fixed view. | [71,72,73] | [33,41,70] | [74] |
| Surveillance Cameras | Provides real-time vision datasets in the form of videos of single or multiple views from the construction environment. | - | - | [32,59,75] |
| Technique | Purpose | Level of Automation | ||
|---|---|---|---|---|
| Manual | Semi-Automated | Fully Automated | ||
| SfM | A technique to reconstruct a 3D model by extracting information from a 2D image. | [19,31,33,62,63,73,76,78] | [77] | - |
| CNN | A deep neural network-based technique to analyze visual imagery. | - | [59,80] | [28,32,65,79] |
| SVM | A supervised technique, used for classification, regression, and edge detection. | - | [29,47,67,68,73,82] | [81] |
| SLAM | A technique used for localization and environment mapping. | [60,70] | - | - |
| CC | A training-dependent classifier that detects the object in question from an image. | [37,59] | - | - |
| SURF | A local feature detector and descriptor are used for object recognition tasks. | - | [71,74] | - |
| LoG | A kernel-based technique is used to detect edges. | [39,40] | - | - |
| HoG | A feature descriptor is used for object detection. | - | [83] | [81] |
| Technique | Purpose | Level of Automation | ||
|---|---|---|---|---|
| Manual | Semi-Automated | Fully Automated | ||
| BIMs registration | It superimposes an as-built dataset onto an as-planned dataset to measure progress status. | [33] | [74,84] | [85] |
| Object recognition/matching | It identifies, recognizes, or matches various construction features from overlayed models. | - | [32,59,73,80,86] | [79] |
| Technique | Purpose | Level of Automation | ||
|---|---|---|---|---|
| Manual | Semi-Automated | Fully Automated | ||
| Color labels | The color labels are indicators of varying sizes and shapes to show the outcome of image processing. | - | [31,65,78,82] | [39,63,68,73] |
| AR and VR | The visualization with overlaying information retrieved from as-built vs. as-planned comparison to depict progress status in a virtual environment. | - | [37,42] | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sami Ur Rehman, M.; Shafiq, M.T.; Ullah, F. Automated Computer Vision-Based Construction Progress Monitoring: A Systematic Review. Buildings 2022, 12, 1037. https://doi.org/10.3390/buildings12071037
Sami Ur Rehman M, Shafiq MT, Ullah F. Automated Computer Vision-Based Construction Progress Monitoring: A Systematic Review. Buildings. 2022; 12(7):1037. https://doi.org/10.3390/buildings12071037
Chicago/Turabian StyleSami Ur Rehman, Muhammad, Muhammad Tariq Shafiq, and Fahim Ullah. 2022. "Automated Computer Vision-Based Construction Progress Monitoring: A Systematic Review" Buildings 12, no. 7: 1037. https://doi.org/10.3390/buildings12071037