
Rotation-Free Based Numerical Model for Nonlinear Analysis of Thin Shells


Abstract
:1. Introduction
2. The Proposed Numerical Formulation
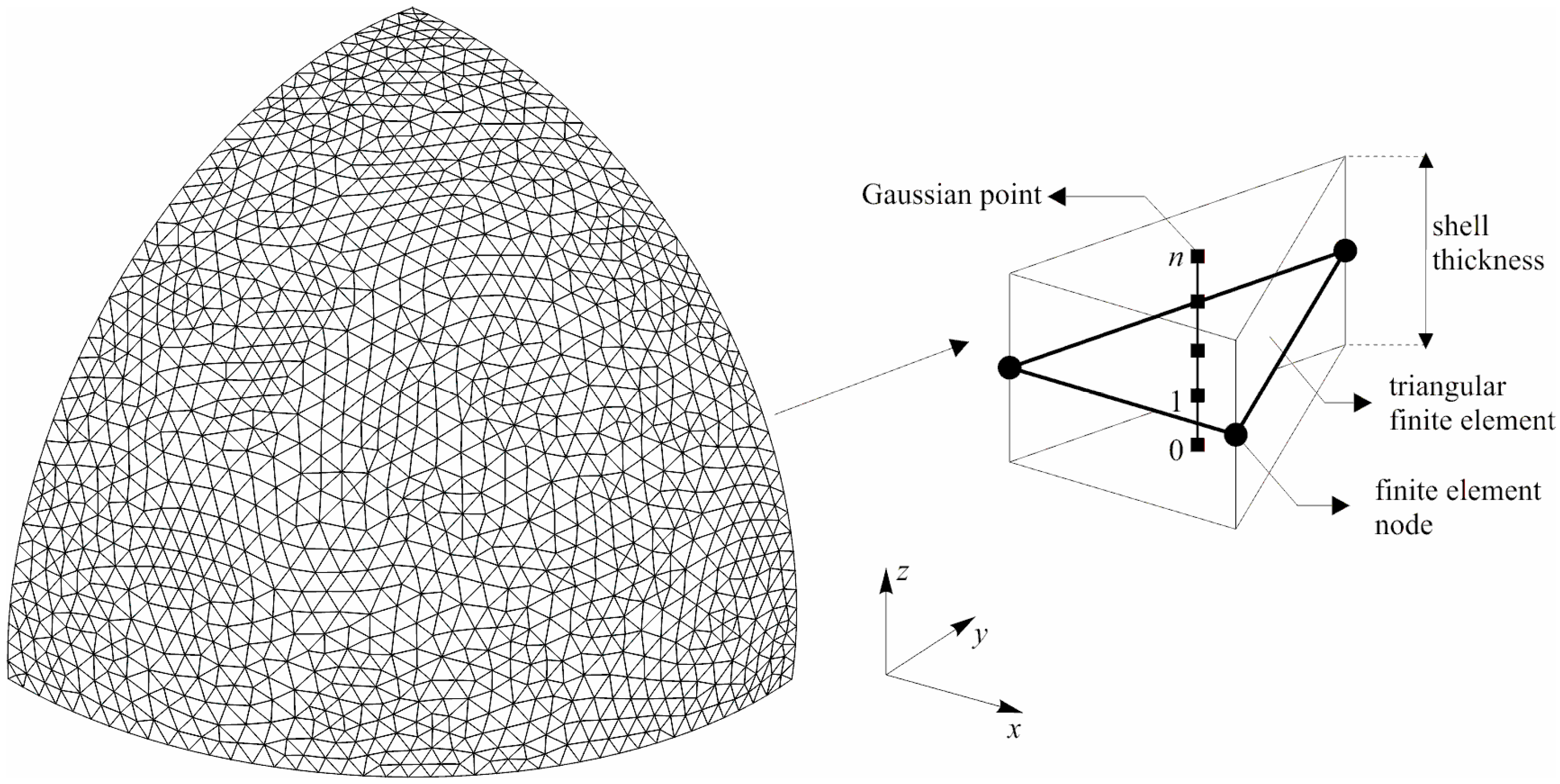
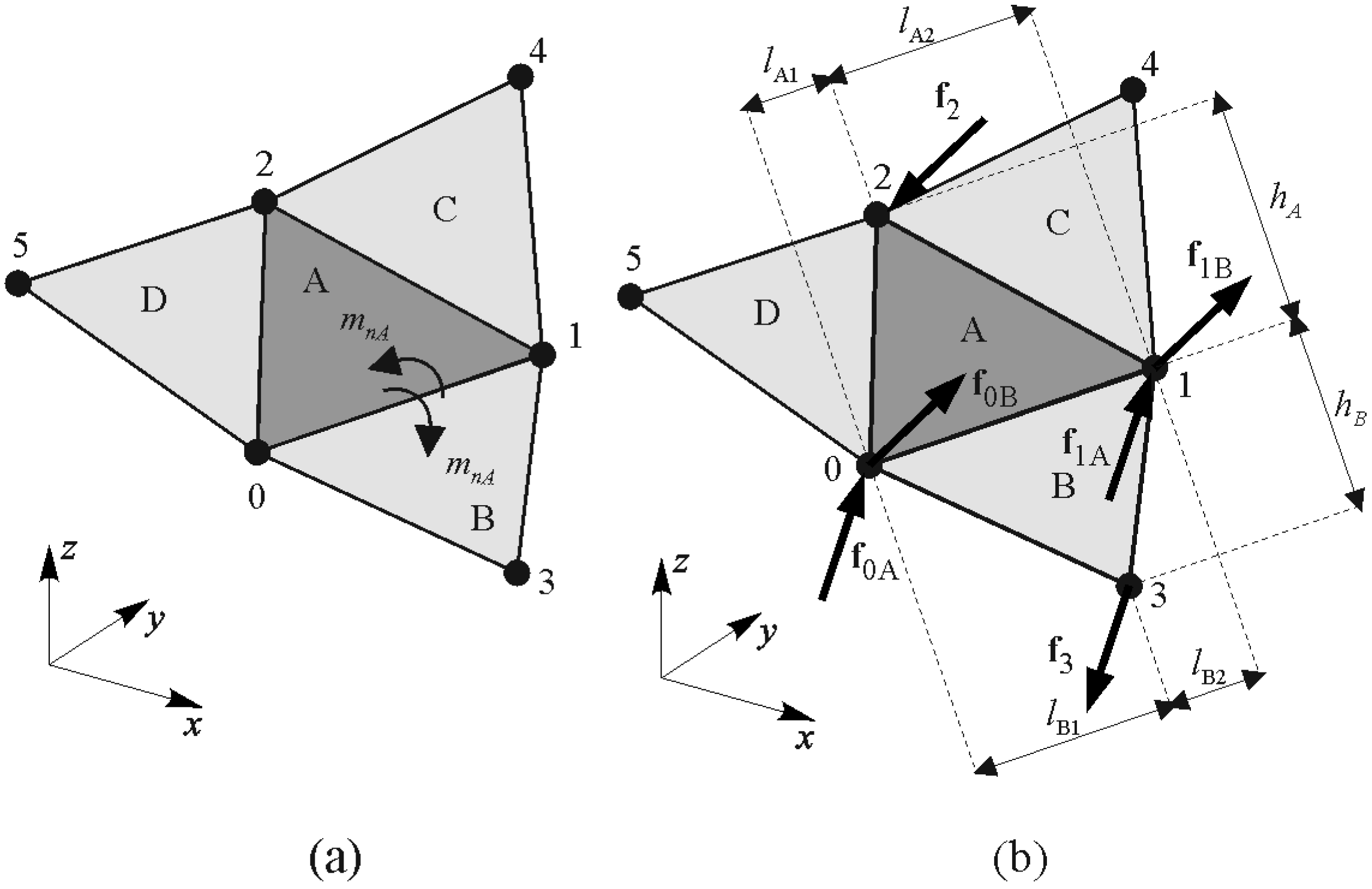
2.1. Discretisation
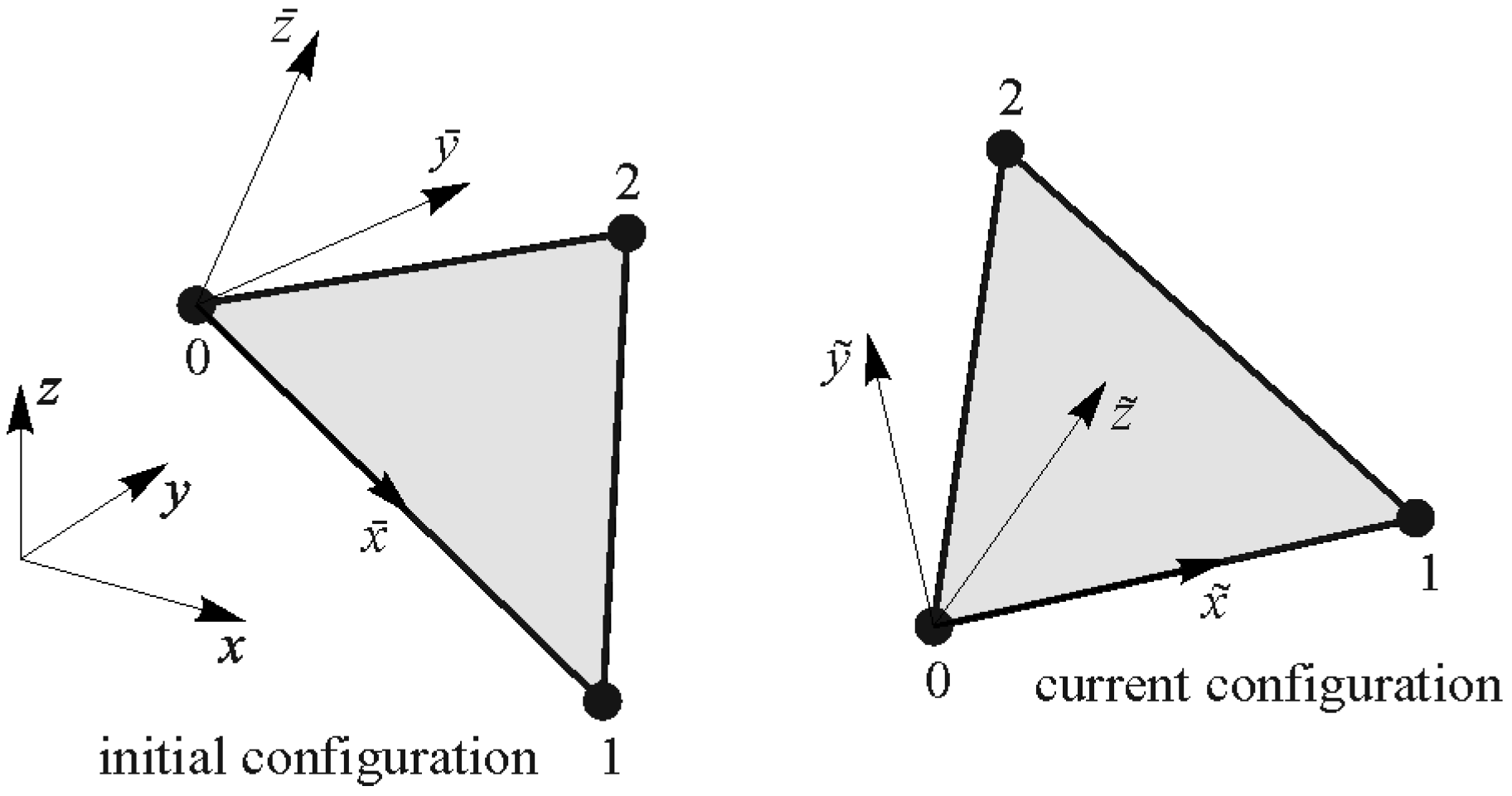
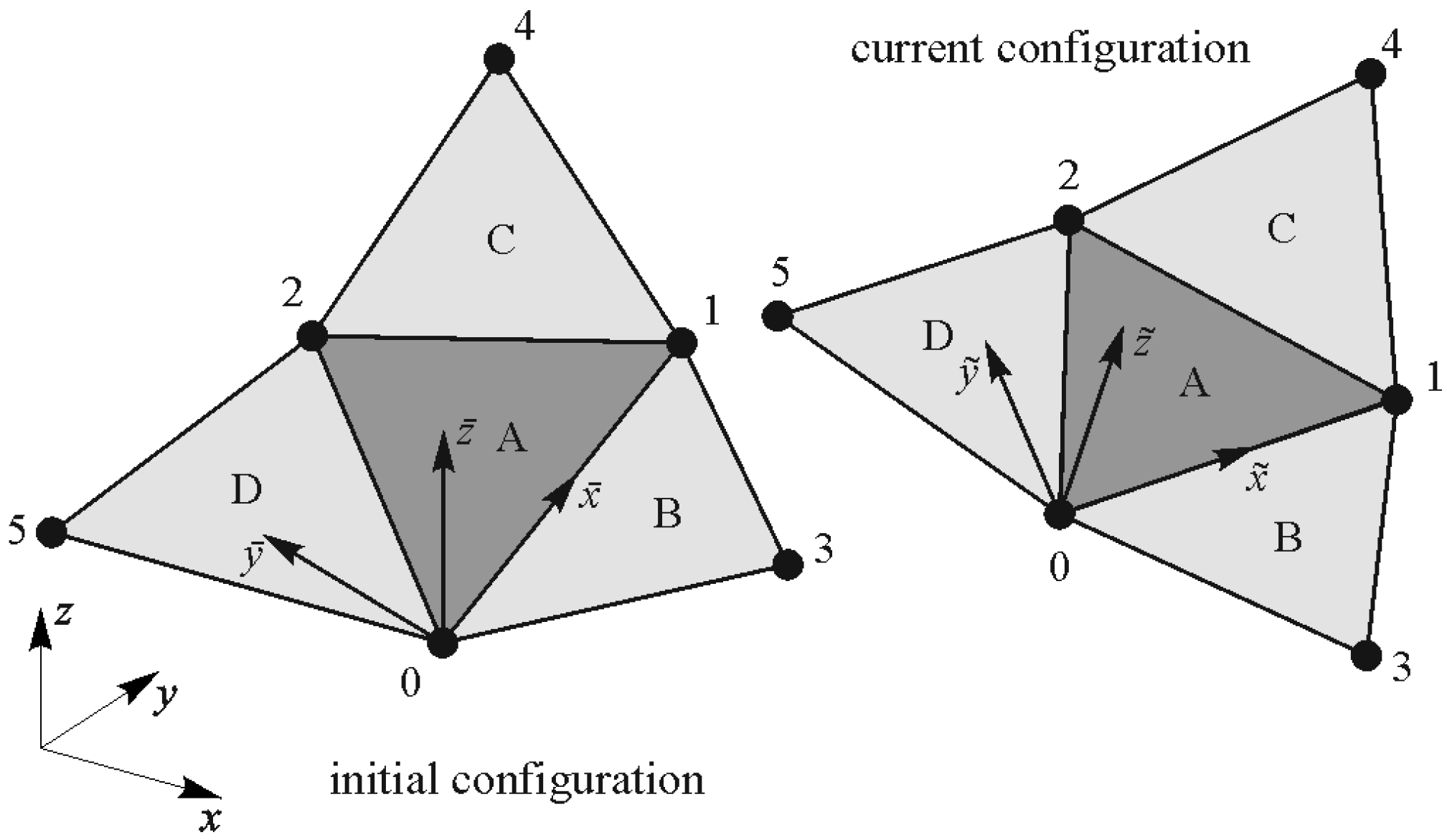
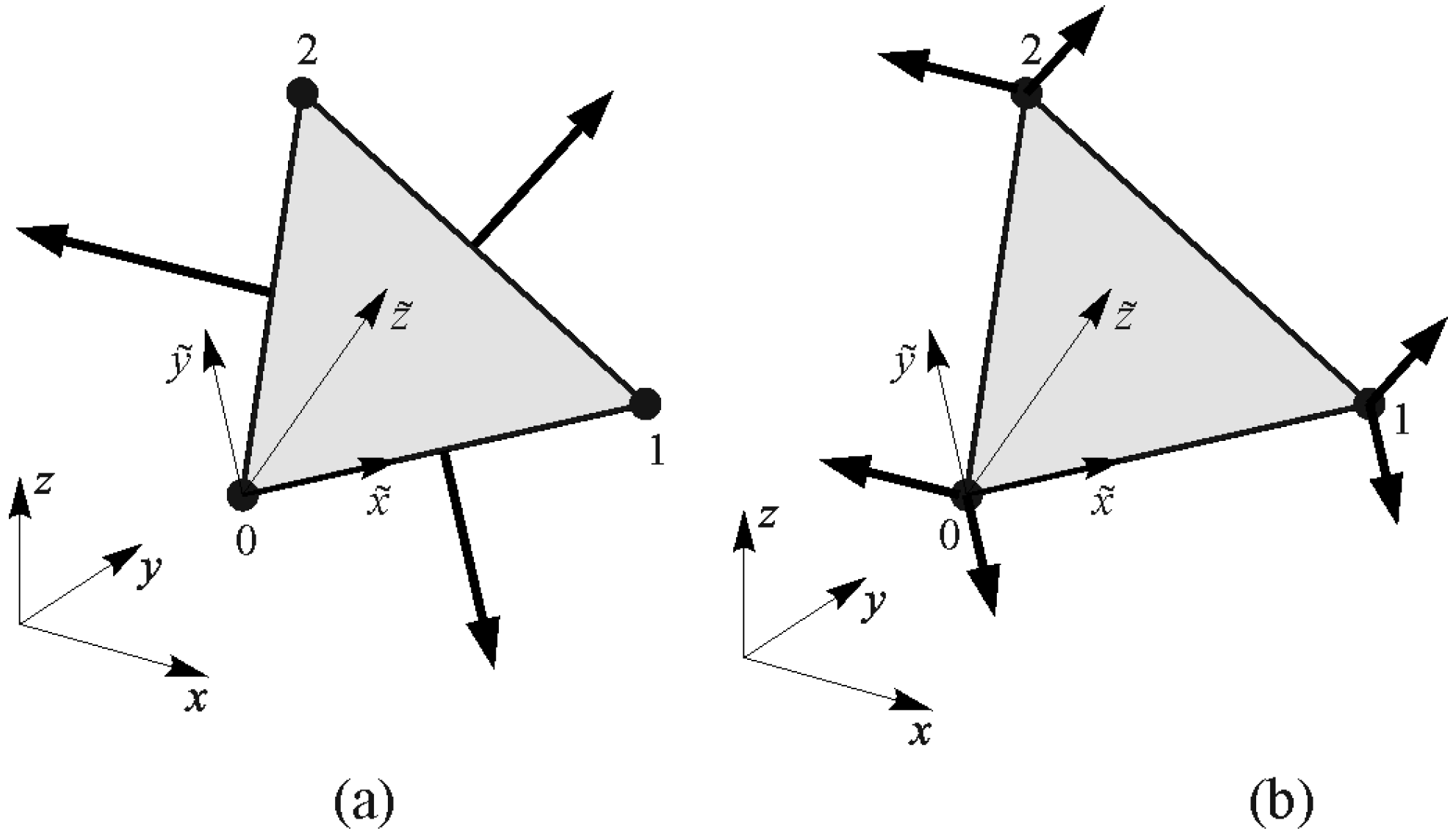
2.2. Calculation of Strain at Gaussian Points
2.3. Material Model
2.4. Stress Presentation over Nodal Forces
2.5. Time Integration of Transient Dynamics
3. Numerical Verification
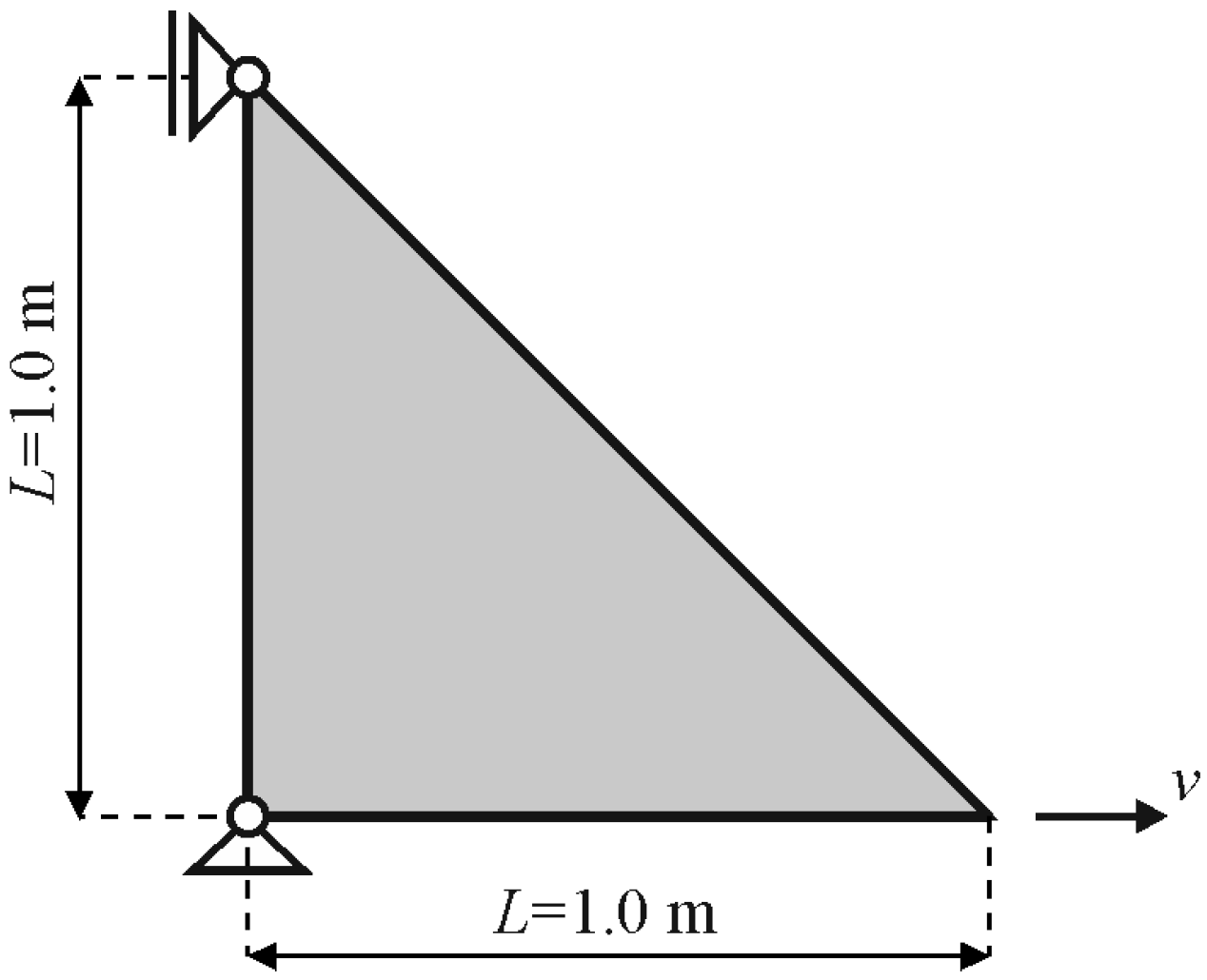
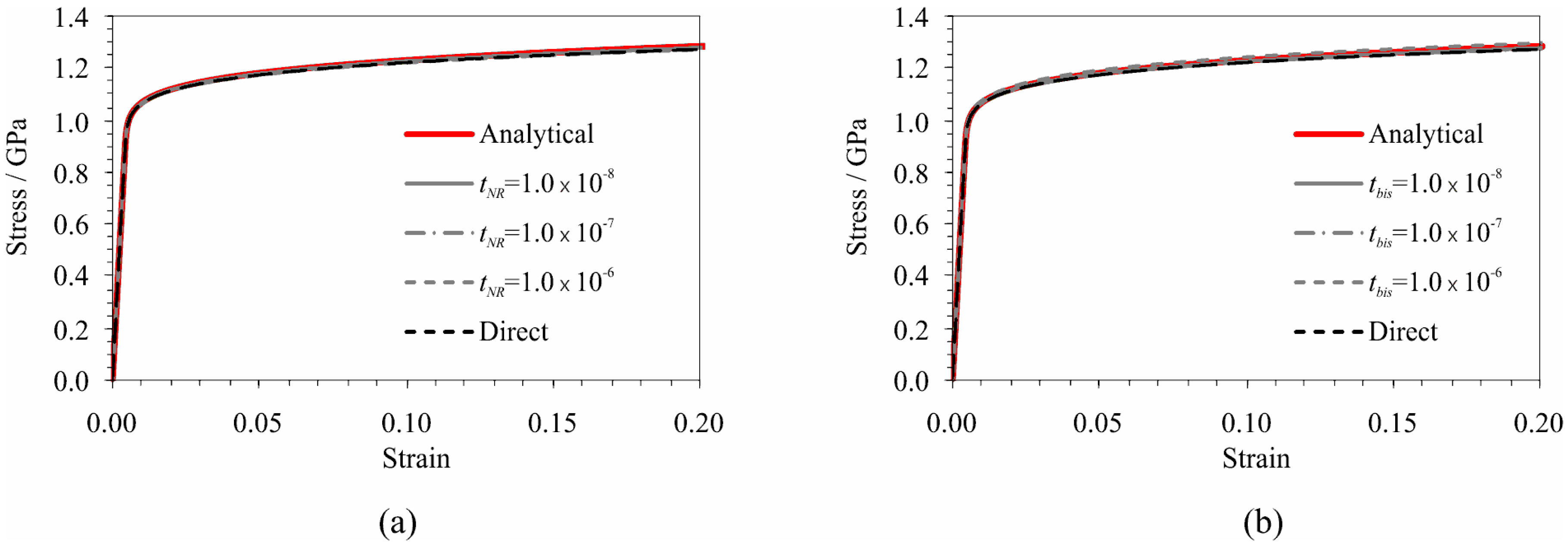
3.1. Uniaxial Tensile Test
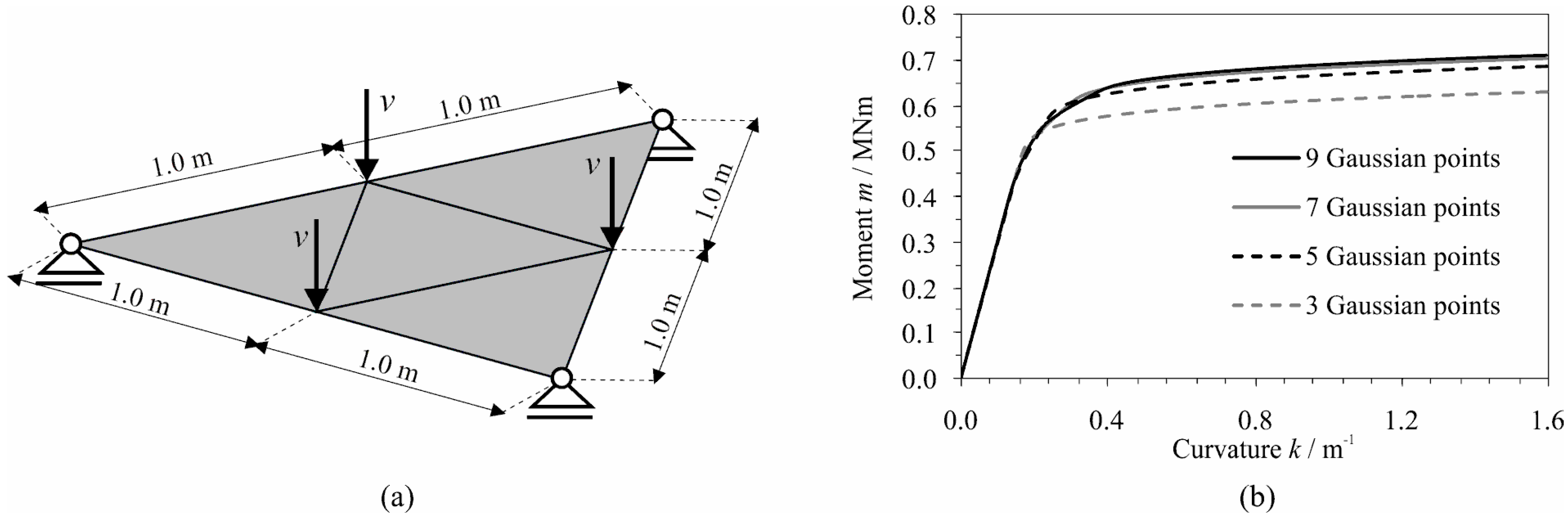
3.2. Four-Element Bending Test
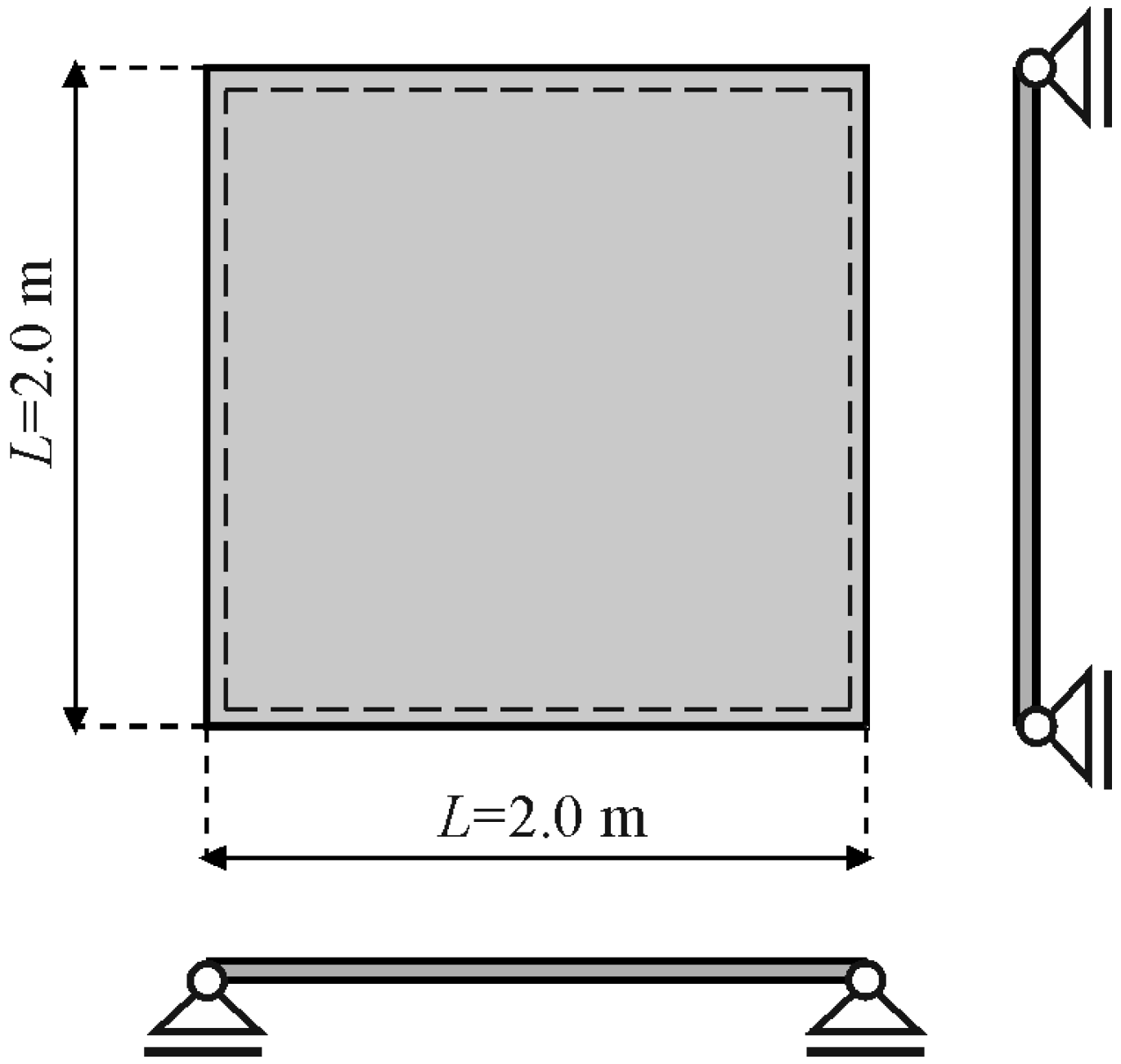
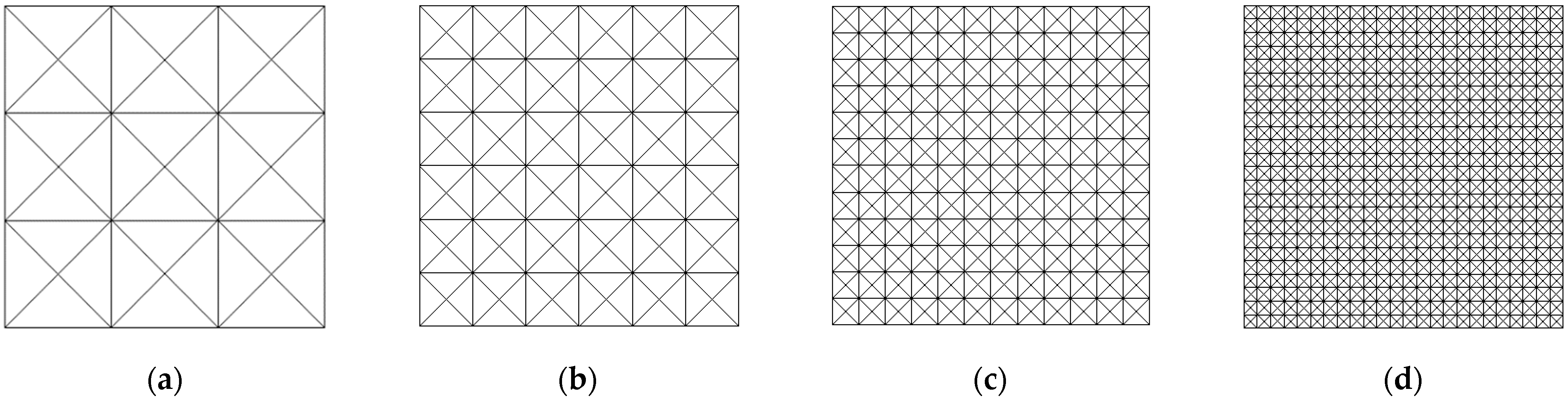
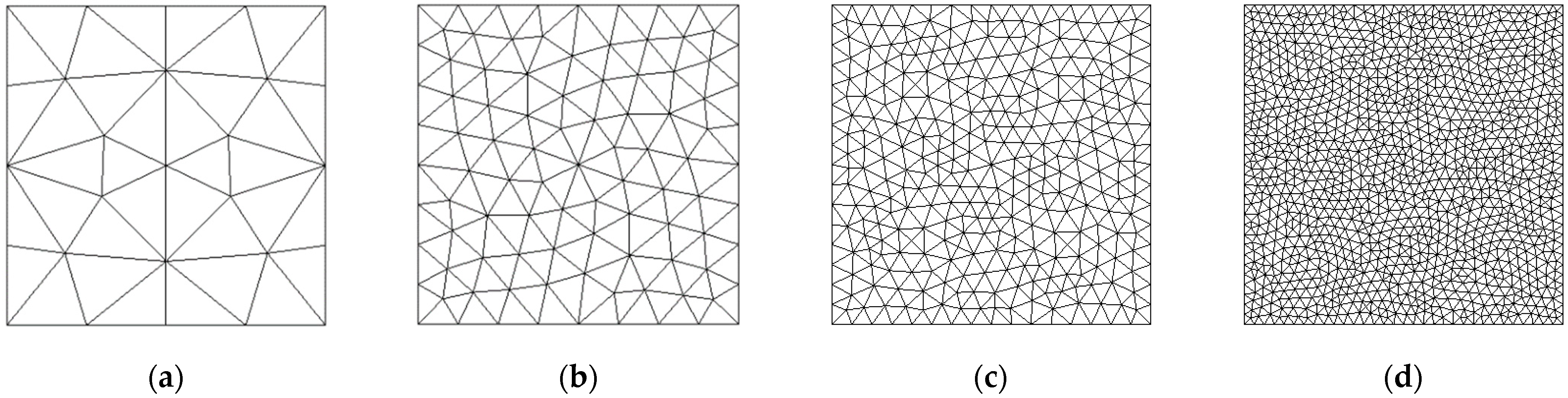
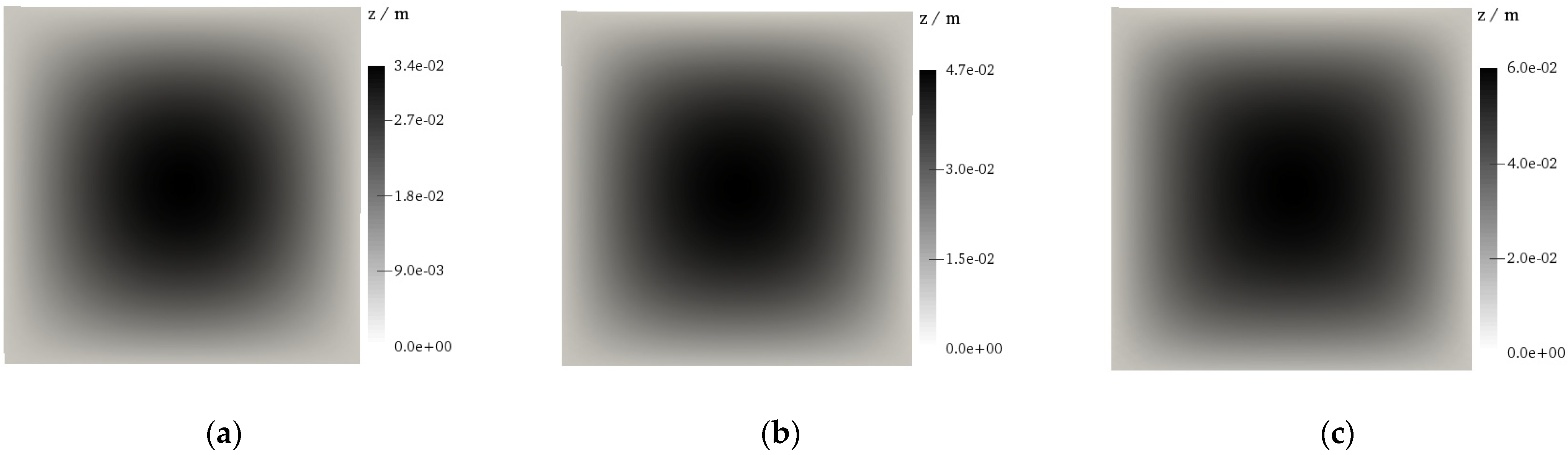
3.3. Square Plate Subjected to Gravity Load
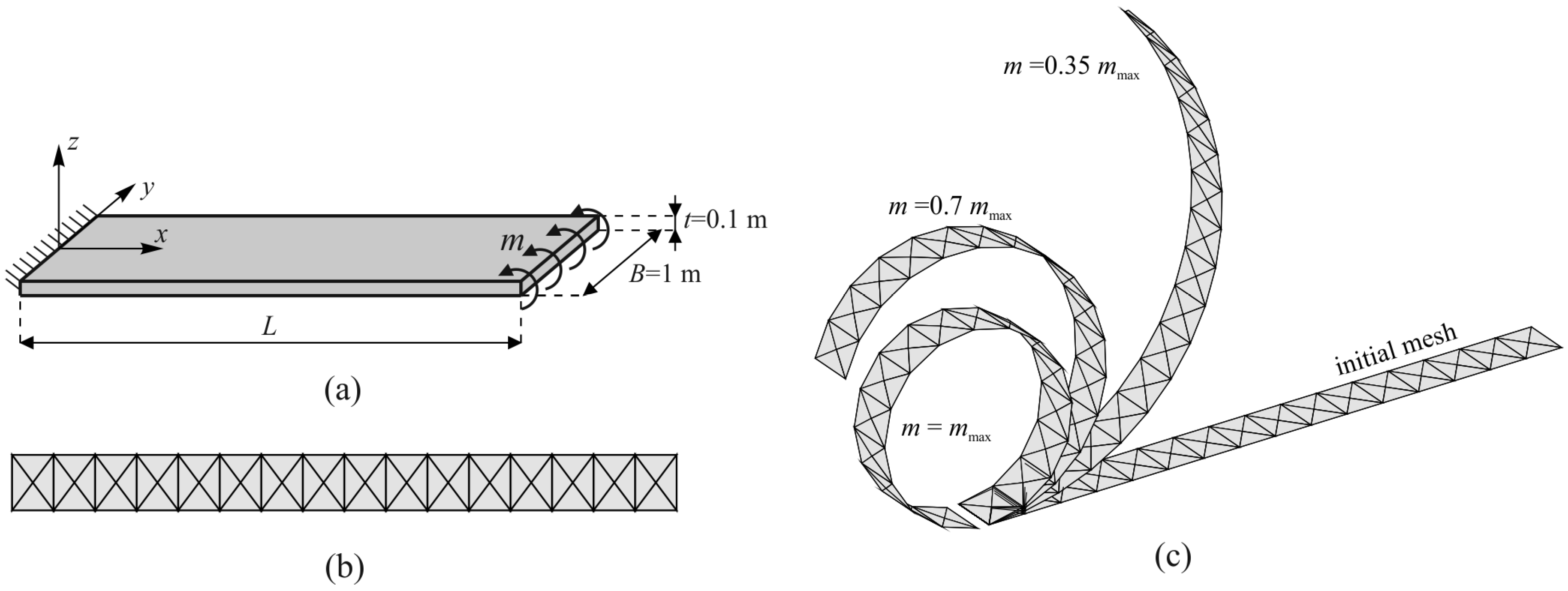
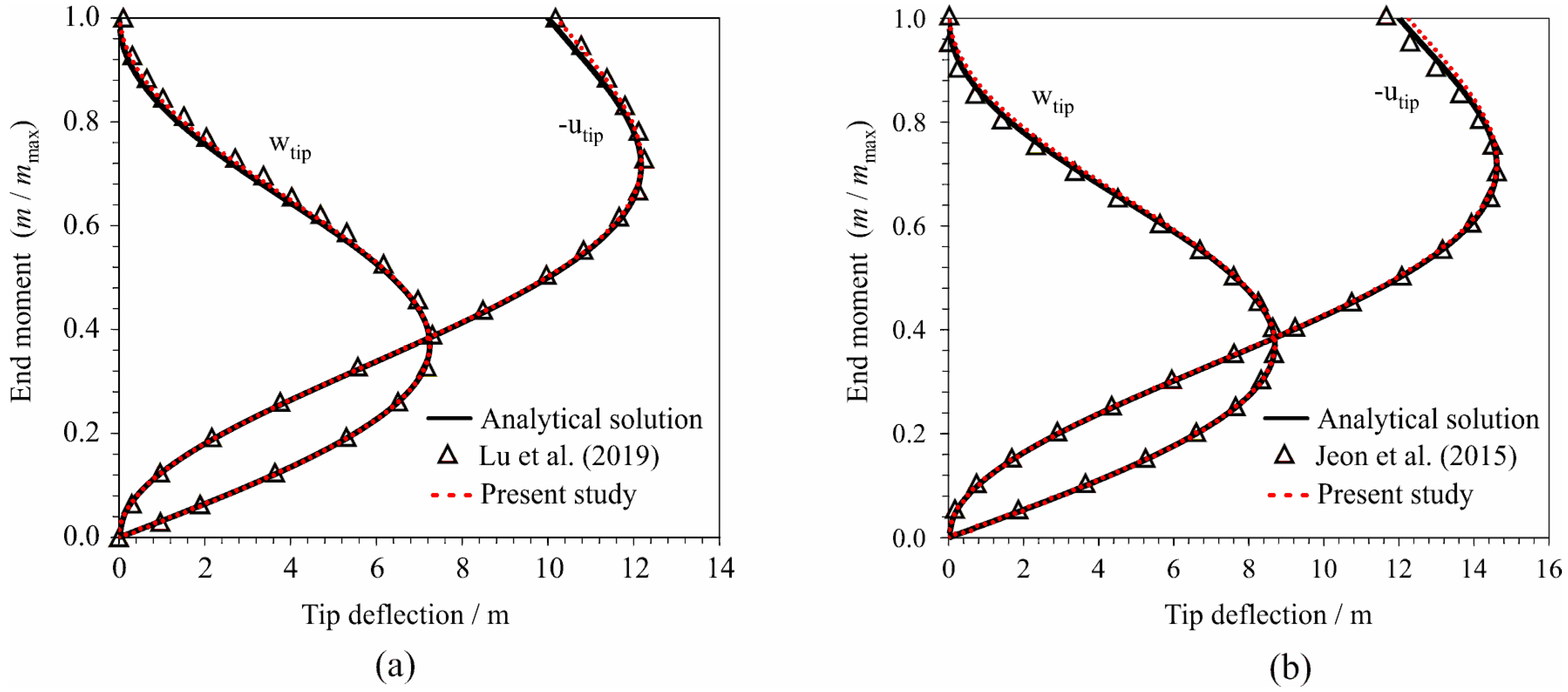
3.4. Cantilever Beam Exposed to End Moment
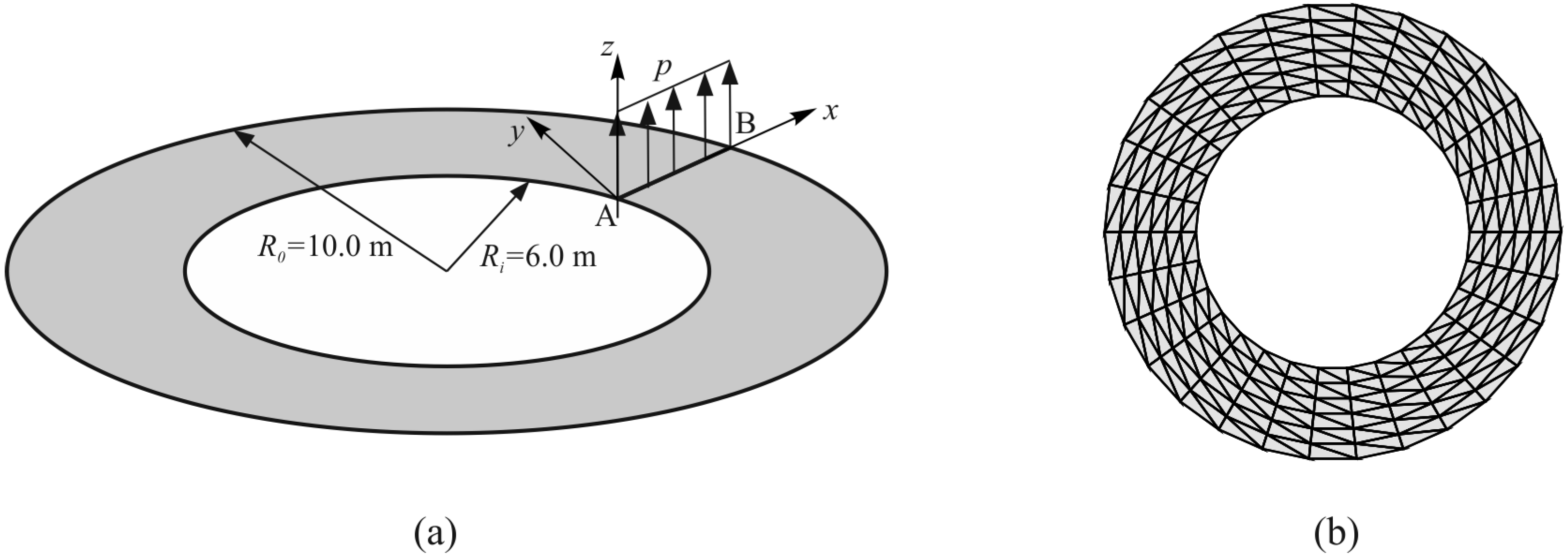
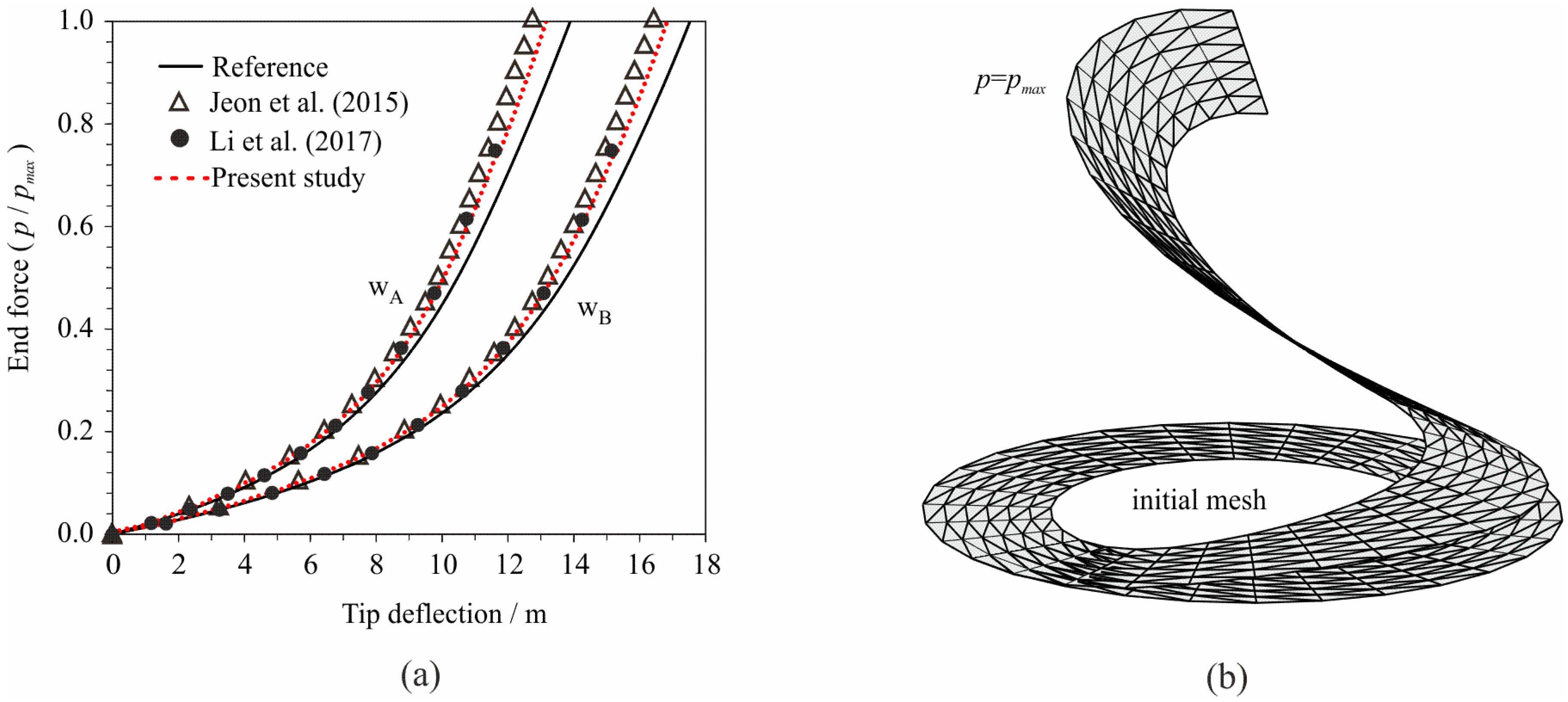
3.5. Slit Annular Plate Exposed to Lifting Force
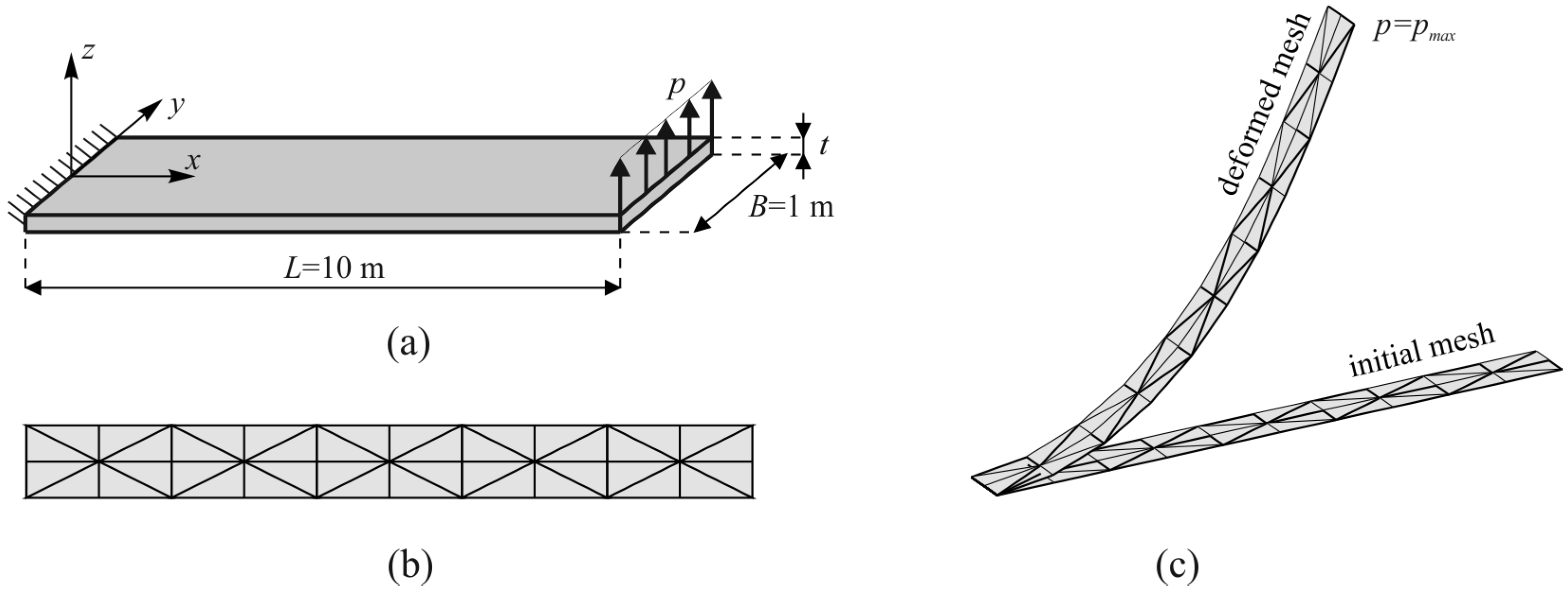
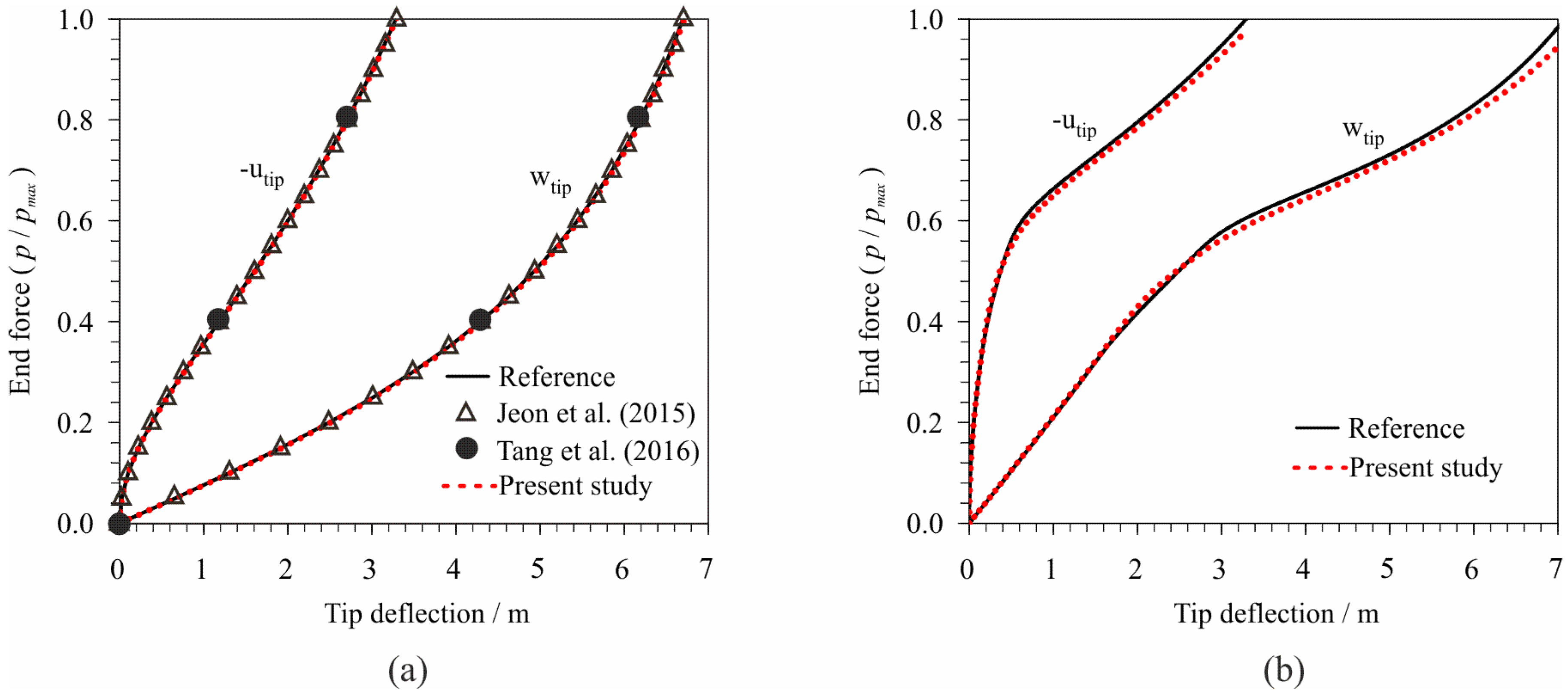
3.6. Cantilever Beam Exposed to End Shear Force
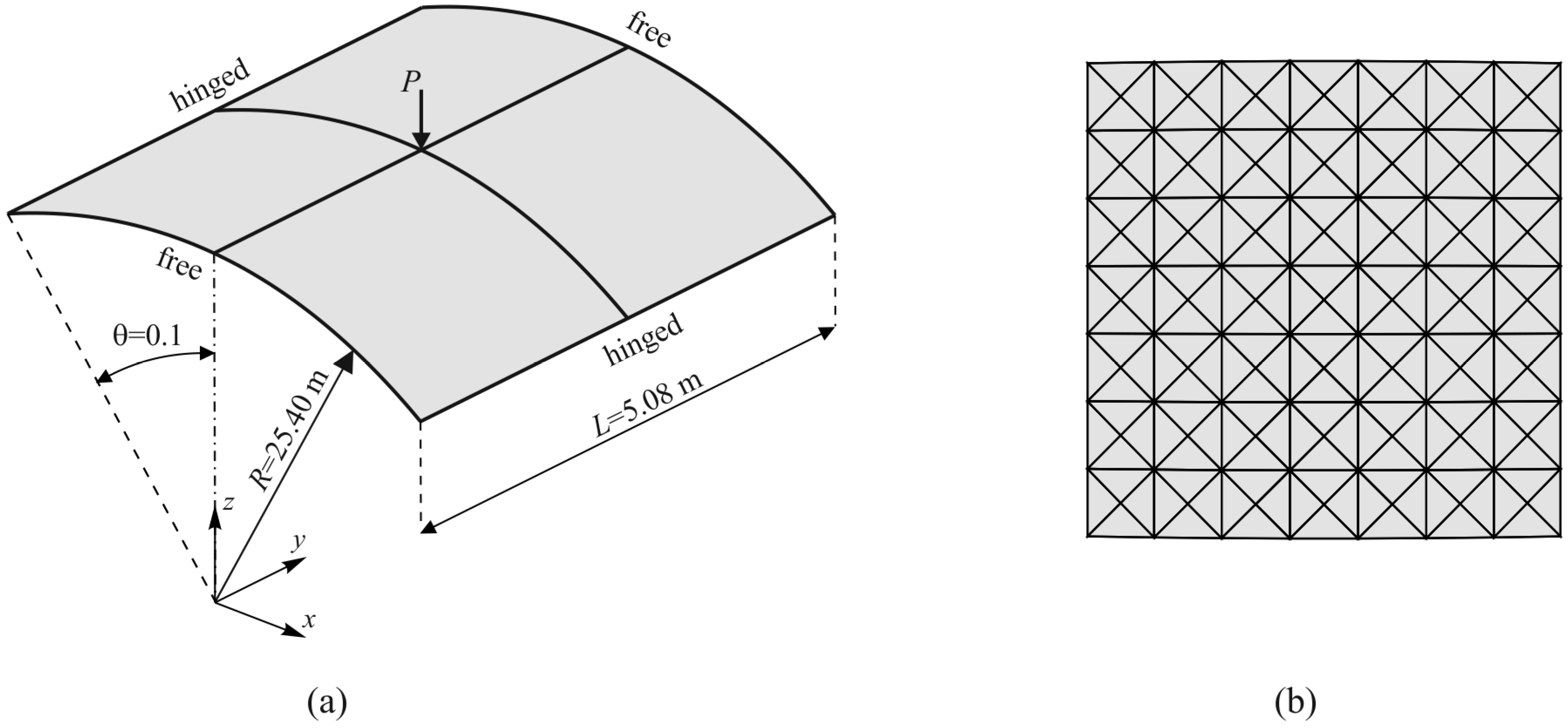
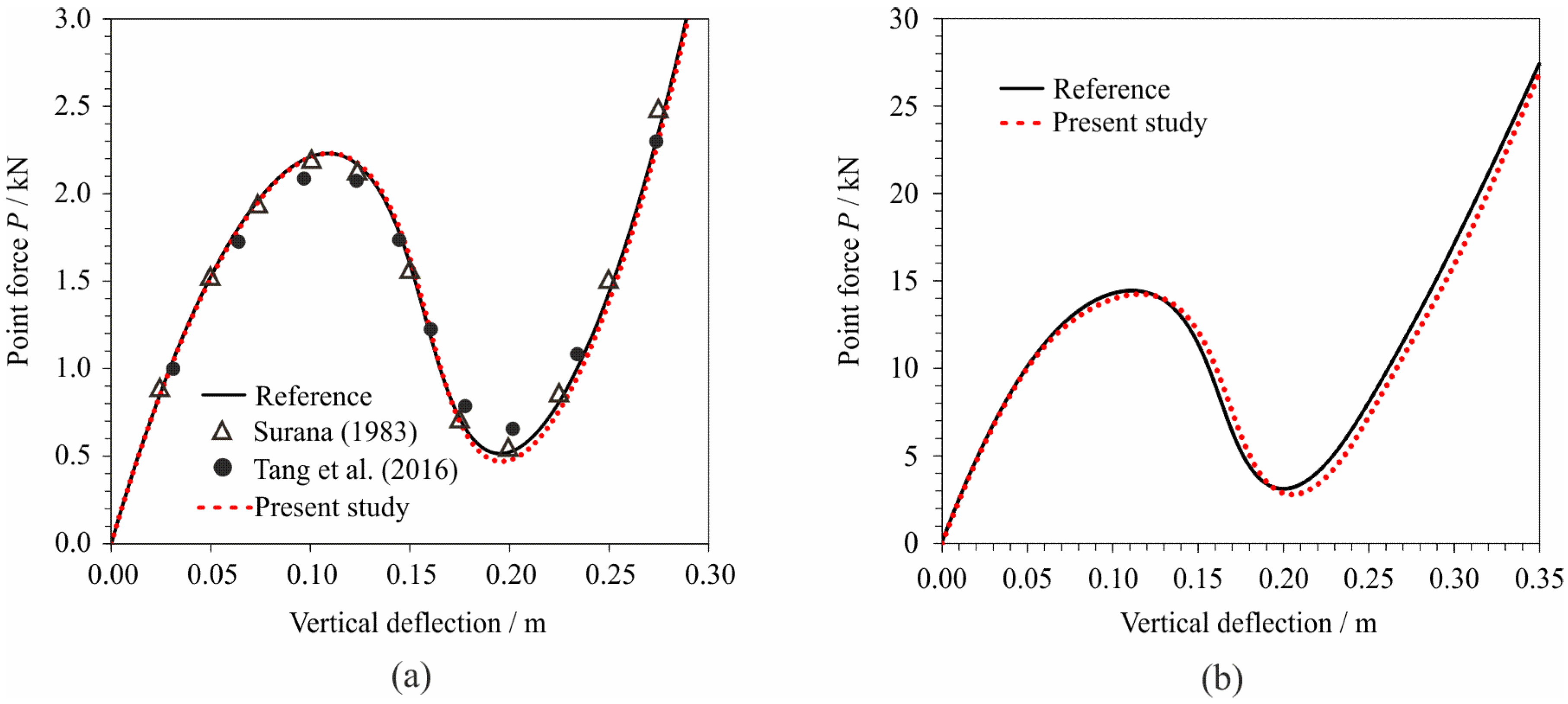
3.7. Hinged Cylindrical Roof under Monotonic Increasing Central Force
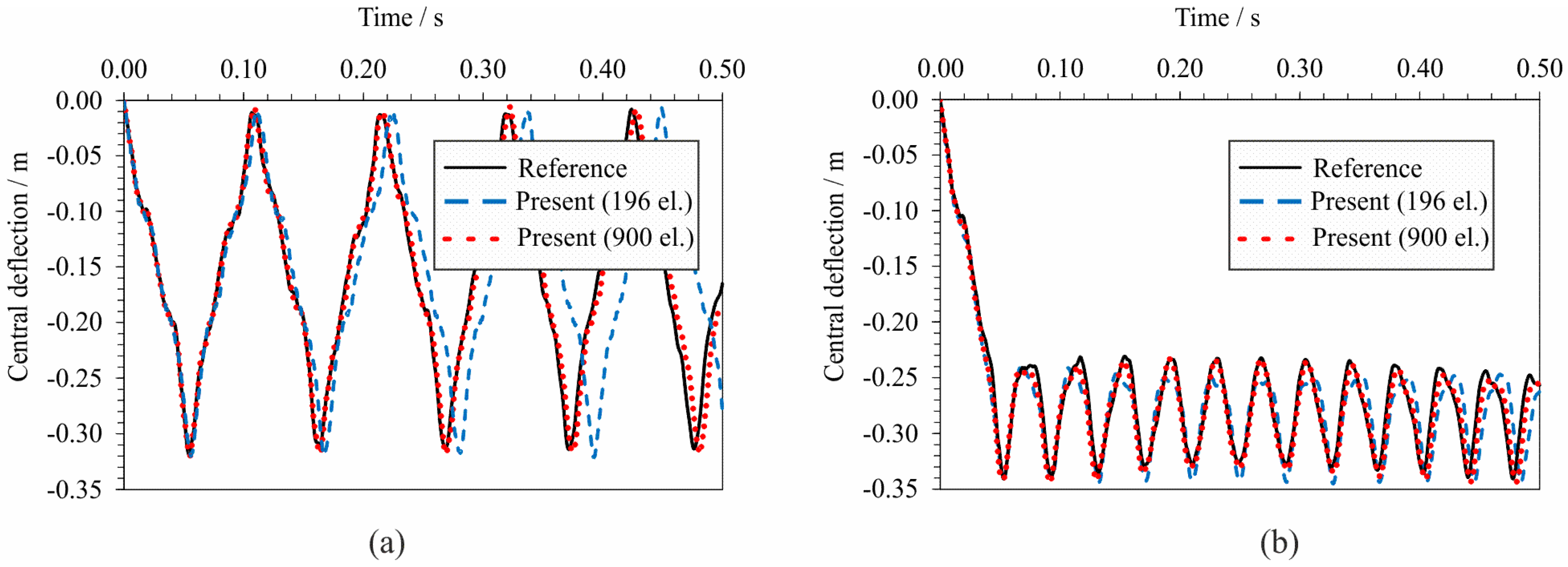
3.8. Free Vibration of Hinged Cylindrical Roof under Constant Central Force
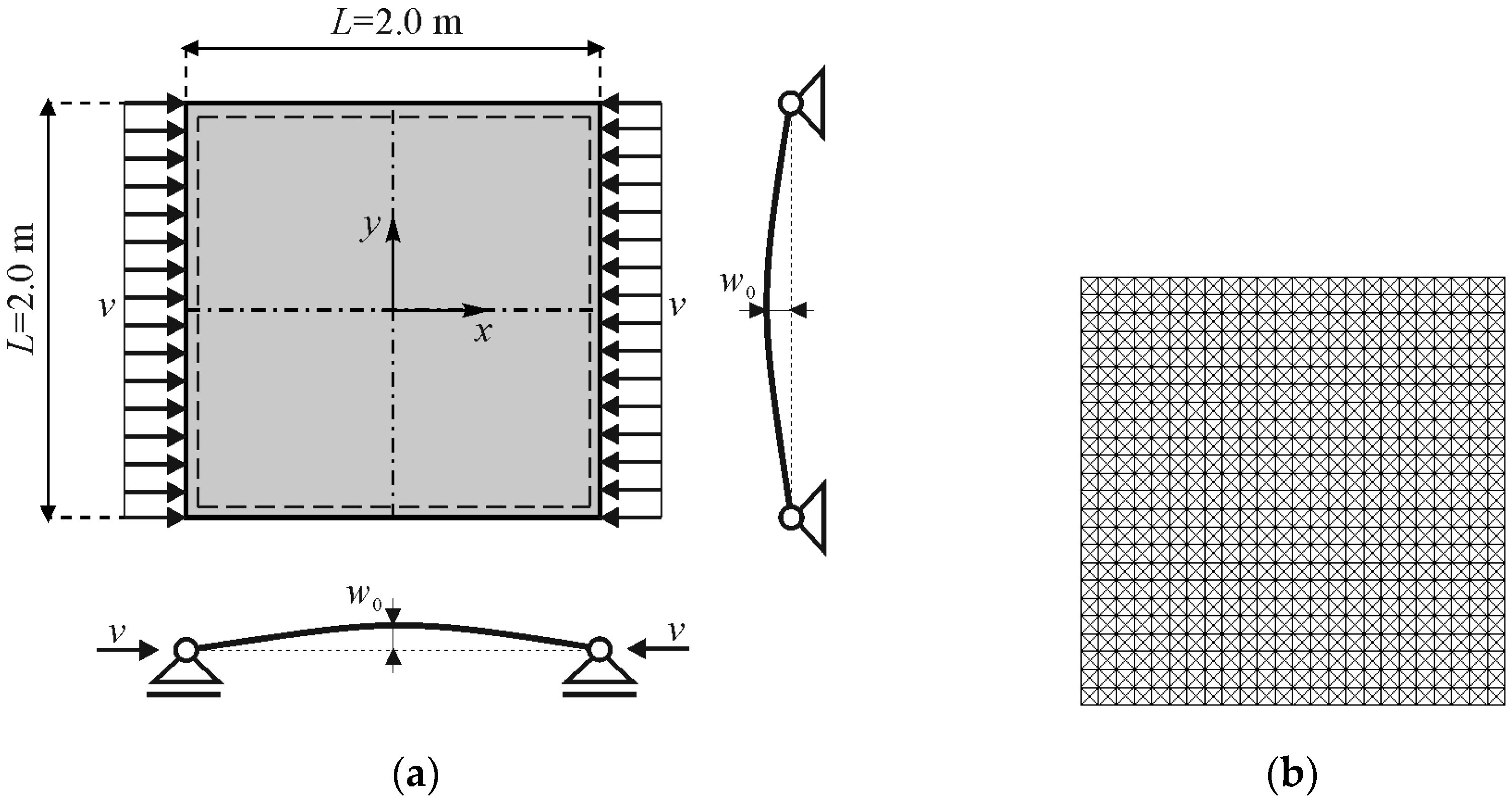
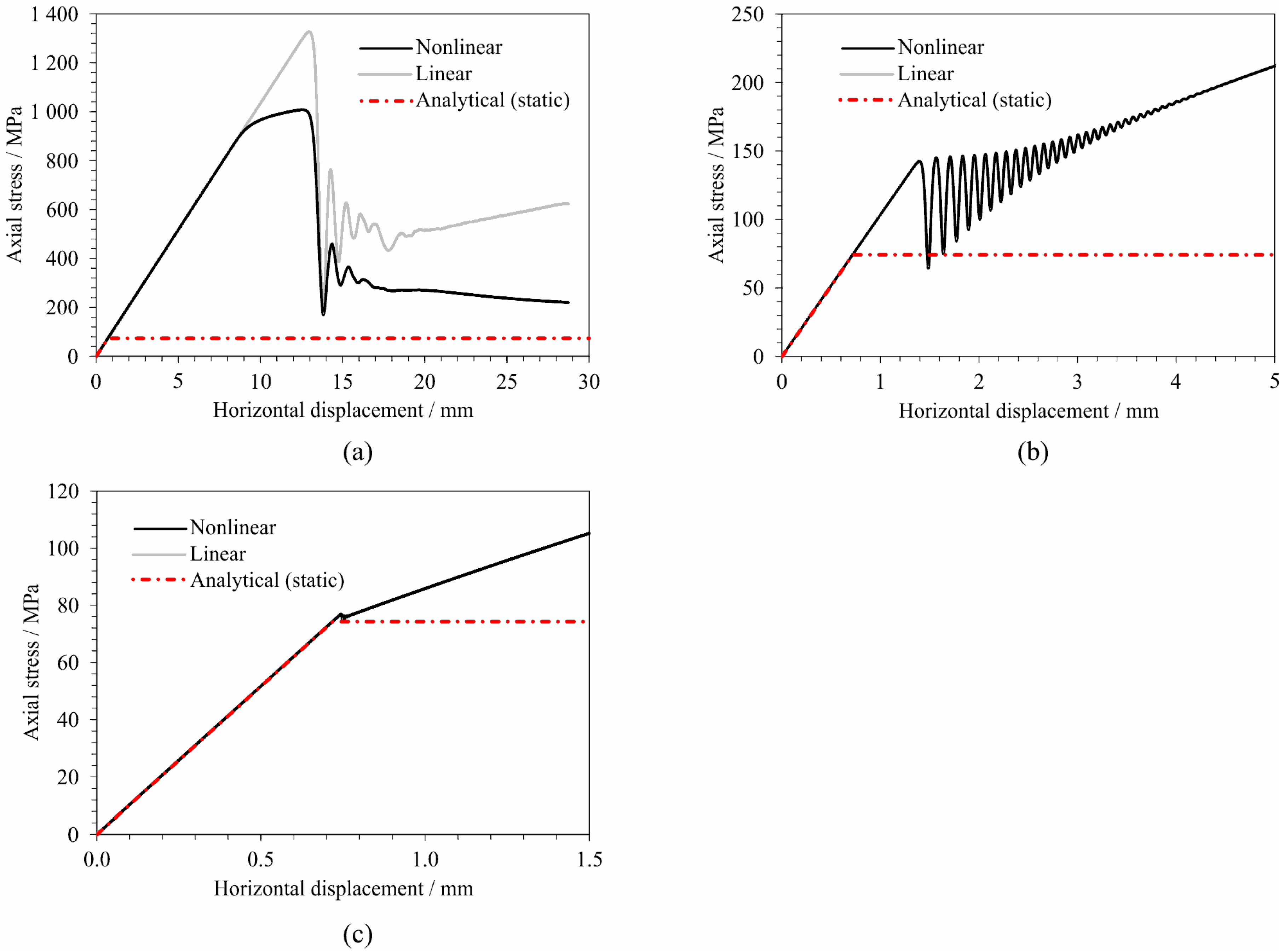
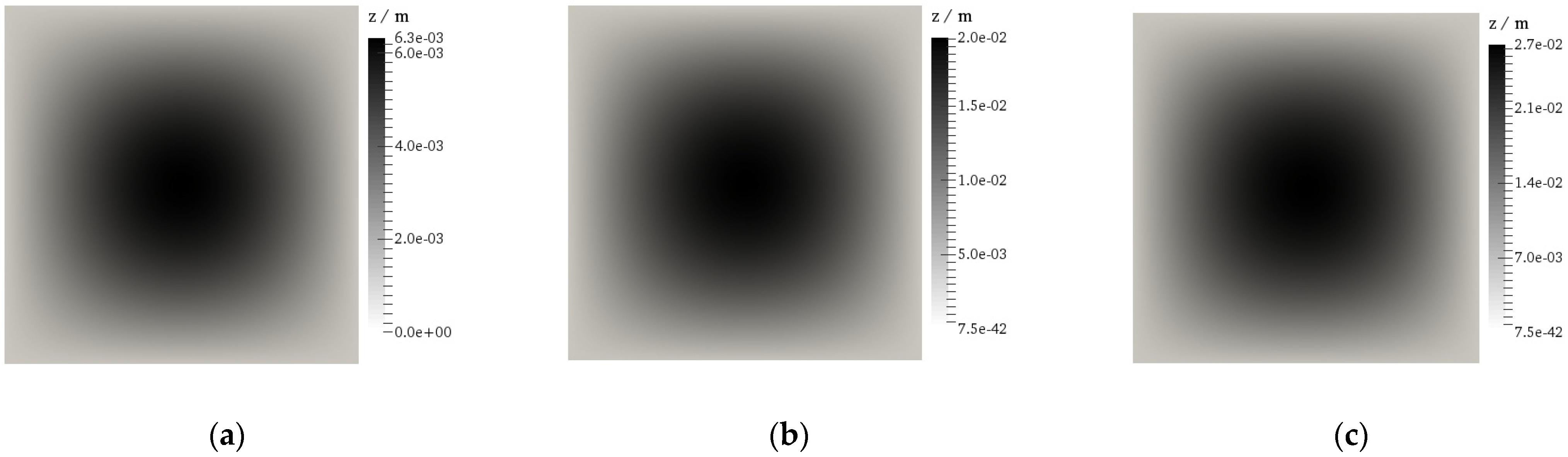
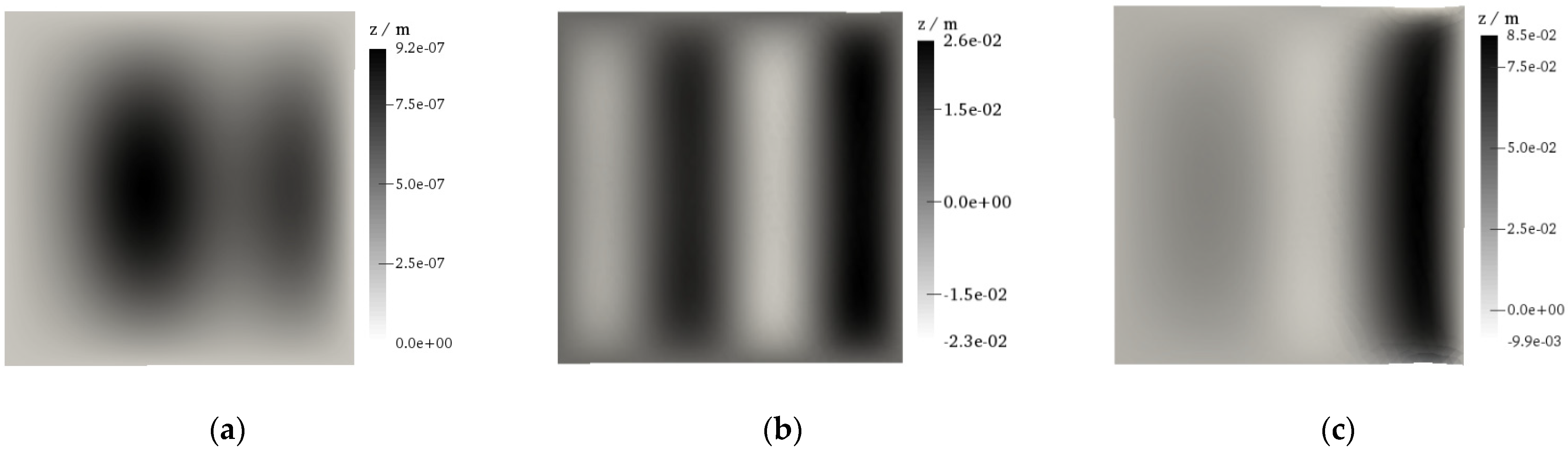
3.9. Buckling of Axially Loaded Rectangular Plate
4. Conclusions
- The presented numerical model is appropriate for the dynamic, quasi-static, and stability analysis of thin shell structures.
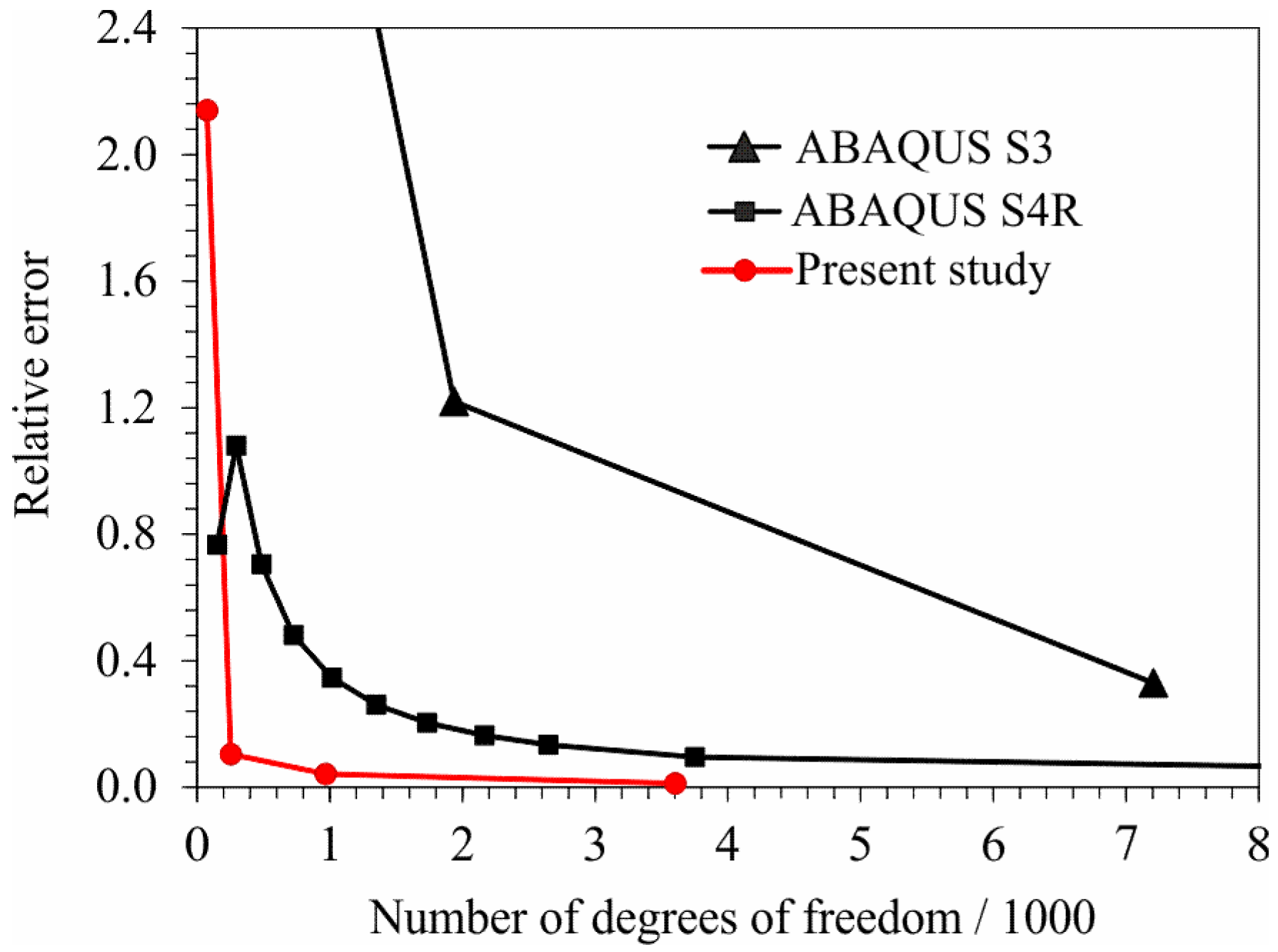
- In the tested examples, the performance of the proposed formulations is similar to or better than the one with standard triangular or quadrilateral shell elements measured in terms of the number of DOFs.
- Finally, it cannot be concluded that the presented numerical model is better or worse than other numerical models of a similar type or that it can do something that could not be done with other numerical models. However, one of the main advantages of the presented numerical model may be sought in the robustness of its formulation. Considering that the time integration transient dynamics is solved explicitly for each degree of freedom, there is no need for introducing stiffness and mass matrix at the system level or to solve the large-scale system of equations. The determination of stress and strain at the Gaussian integration points is based on the geometry of the control domain determined by the observed triangle and three neighbouring triangles, which implies that no information related to other triangular FEs in the system is required. In view of the above, the presented formulation seems appropriate for the parallel programming to be executed at the level of the control domain.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bucalem, M.L.; Bathe, K.J. Finite element analysis of shell structures. Arch. Comput. Methods Eng. 1997, 4, 3–61. [Google Scholar] [CrossRef]
- Stolarski, H.; Belytschko, T.; Lee, S.H. A review of shell finite elements and corotational theories. Comput. Mech. Adv. 1995, 2, 125–212. [Google Scholar]
- Chapelle, D.; Bathe, K.-J. The Finite Element Analysis of Shells—Fundamentals, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Lavrenčič, M.; Brank, B. Hybrid-Mixed Low-Order Finite Elements for Geometrically Exact Shell Models: Overview and Comparison. Arch. Comput. Methods Eng. 2021, 28, 3917–3951. [Google Scholar] [CrossRef]
- Altenbach, H.; Chinchaladze, N.; Kienzler, R.; Müller, W.H. Analysis of Shells, Plates, and Beams. A State of the Art Report; Springer Nature Switzerland AG: Cham, Switzerland, 2020. [Google Scholar]
- Ahmad, S.; Irons, B.M.; Zienkiewicz, O.C. Analysis of thick and thin shell structures by curved finite elements. Int. J. Numer. Methods Eng. 1970, 2, 419–451. [Google Scholar] [CrossRef]
- Zhang, R.; Zhong, H.; Yao, X.; Han, Q. A quadrature element formulation of geometrically nonlinear laminated composite shells incorporating thickness stretch and drilling rotation. Acta Mech. 2020, 231, 1685–1709. [Google Scholar] [CrossRef]
- Boutagouga, D. A Review on Membrane Finite Elements with Drilling Degree of Freedom. Arch. Comput. Methods Eng. 2021, 28, 3049–3065. [Google Scholar] [CrossRef]
- Li, Z.; Wei, H.; Vu-Quoc, L.; Izzuddin, B.A.; Zhuo, X.; Li, T. A co-rotational triangular finite element for large deformation analysis of smooth, folded and multi-shells. Acta Mech. 2021, 232, 1515–1542. [Google Scholar] [CrossRef]
- Li, Z.; Izzuddin, B.A.; Vu-Quoc, L.; Rong, Z.; Zhuo, X. A 3-node co-rotational triangular elasto-plastic shell element using vectorial rotational variables. Adv. Steel Constr. 2017, 13, 206–240. [Google Scholar]
- Gal, E.; Levy, R. Geometrically nonlinear analysis of shell structures using a flat triangular shell finite element. Arch. Comput. Methods Eng. 2006, 13, 235–302. [Google Scholar] [CrossRef]
- Gal, E. Triangular Shell Element for Geometrically Nonlinear Analysis. Ph.D. Thesis, Faculty of Civil Engineering, Technion—Israel Institute of Technology, Haifa, Israel, 2002. (In Hebrew). [Google Scholar]
- Nama, N.; Aguirre, M.; Humphrey, J.D.; Figueroa, C.A. A nonlinear rotation-free shell formulation with prestressing for vascular biomechanics. Sci. Rep. 2020, 10, 17528. [Google Scholar] [CrossRef]
- Phaal, R.; Calladine, C. A simple class of finite elements for plate and shell problems. I: Elements for beams and thin flat plates. Int. J. Numer. Methods Eng. 1992, 35, 955–977. [Google Scholar] [CrossRef]
- Phaal, R.; Calladine, C. A simple class of finite elements for plate and shell problems. II: An element for thin shells, with only translational degrees of freedom. Int. J. Numer. Methods Eng. 1992, 35, 979–996. [Google Scholar] [CrossRef]
- Oñate, E.; Cervera, M. Derivation of thin plate bending elements with one degree of freedom per node: A simple three node triangle. Eng. Comput. 1993, 10, 543–561. [Google Scholar] [CrossRef]
- Oñate, E.; Zarate, F. Rotation-free triangular plate and shell elements. Int. J. Numer. Methods Eng. 2000, 47, 557–603. [Google Scholar] [CrossRef]
- Flores, F.; Oñate, E. A basic thin shell triangle with only translation DOFs for large strain plasticity. Int. J. Numer. Methods Eng. 2001, 51, 57–83. [Google Scholar] [CrossRef]
- Oñate, E.; Flores, F. Advances in the formulation of the rotation-free basic shell triangle. Comput. Methods Appl. Mech. Eng. 2005, 194, 2406–2443. [Google Scholar] [CrossRef]
- Valdés, J.G.; Oñate, E. Orthotropic rotation-free basic thin shell triangle. Comput. Mech. 2009, 44, 363–375. [Google Scholar] [CrossRef]
- Linhard, J.; Wüchner, R.; Bletzinger, K.-U. “Upgrading” membranes to shells—The CEG rotation free shell element and its application in structural analysis. Finite Elem. Anal. Des. 2007, 44, 63–74. [Google Scholar] [CrossRef]
- Stolarski, H.; Gilmanov, A.; Sotiropoulos, F. Nonlinear rotation-free three-node shell finite element formulation. Int. J. Numer. Methods Eng. 2013, 95, 740–770. [Google Scholar] [CrossRef]
- Uzelac, I.; Smoljanovic, H.; Batinic, M.; Peroš, B.; Munjiza, A. A model for thin shells in the combined finite-discrete element method. Eng. Comput. 2018, 35, 377–394. [Google Scholar] [CrossRef]
- Uzelac, I.; Smoljanović, H.; Galić, M.; Munjiza, A.; Mihanović, A. Computational aspects of the combined finite-discrete element method in static and dynamic analysis of shell structures. Mater. Sci. Eng. Technol. 2018, 49, 635–651. [Google Scholar]
- Munjiza, A. The Combined Finite-Discrete Element Method; John Wiley & Sons: Oxford, UK, 2004. [Google Scholar]
- Munjiza, A.; Knight, E.E.; Rouiger, E. Computational Mechanics of Discontinua; John Wiley & Sons: Oxford, UK, 2012. [Google Scholar]
- Munjiza, A.; Latham, J.P. Some computational and algorithmic developments in computational mechanics of discontinua. Philos. Trans. R. Soc. Lond. Ser. A 2004, 362, 1817–1833. [Google Scholar] [CrossRef]
- Munjiza, A.; Lei, Z.; Divic, V.; Peros, B. Fracture and fragmentation of thin shells using the combined finite-discrete element method. Int. J. Numer. Methods Eng. 2013, 95, 478–498. [Google Scholar] [CrossRef]
- Munjiza, A.; Knight, E.E.; Rougier, E. Large Strain Finite Element Method: A Practical Course; John Wiley & Sons: Oxford, UK, 2014. [Google Scholar]
- Lubliner, J. Plasticity Theory; Macmillan: New York, NY, USA, 1990. [Google Scholar]
- Ventsel, E.; Krauthammer, T. Thin Plates and Shells Theory, Analysis and Applications; Marcel Dekker, Inc.: New York, NY, USA, 2001. [Google Scholar]
- Ming, L.; Pantalé, O. An efficient and robust VUMAT implementation of elastoplastic constitutive laws in Abaqus/Explicit finite element code. Mech. Ind. 2018, 19, 308. [Google Scholar] [CrossRef] [Green Version]
- Gao, C.Y. FE realization of a thermo-visco-plastic constitutive model using VUMAT in ABAQUS/Explicit program. Comput. Mech. 2007, 301. [Google Scholar] [CrossRef]
- ABAQUS; Version 6.13; User Documentation; Dassault Systemes Simulia Corporation: Johnston, RI, USA, 2018.
- Sze, K.Y.; Liu, X.H.; Lo, S.H. Popular benchmark problems for geometric nonlinear analysis of shells. Finite Elem. Anal. Des. 2004, 40, 1551–1569. [Google Scholar] [CrossRef]
- Lu, X.; Tian, Y.; Sun, C.; Zhang, S. Development and Application of a High-Performance Triangular Shell Element and an Explicit Algorithm in OpenSees for Strongly Nonlinear Analysis. CMES-Comp. Model. Eng. Sci. 2019, 120, 561–582. [Google Scholar] [CrossRef] [Green Version]
- Jeon, H.-M.; Lee, Y.; Lee, P.-S.; Bathe, K.-J. The MITC3+ shell element in geometric nonlinear analysis. Comp. Struct. 2015, 146, 91–104. [Google Scholar] [CrossRef]
- Tang, Y.Q.; Zhou, Z.H.; Chan, S.L. Geometrically nonlinear analysis of shells by quadrilateral flat shell element with drill, shear, and warping. Int. J. Numer. Methods Eng. 2016, 108, 1248–1272. [Google Scholar] [CrossRef]
- Surana, K.S. Geometrically nonlinear formulation for the curved shell elements. Int. J. Numer. Methods Eng. 1983, 19, 581–615. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| E, GPa | ν | A, MPa | B, MPa | n |
|---|---|---|---|---|
| 206.9 | 0.29 | 806 | 614 | 0.168 |
| Rel. Error (%) | Iterations | |
|---|---|---|
| tbis = 1 × 10−8 | 0.24 | 19.982 |
| tbis = 1 × 10−7 | 0.42 | 16.000 |
| tbis = 1 × 10−6 | 1.23 | 13.000 |
| tNR = 1 × 10−8 | 0.24 | 2.993 |
| tNR = 1 × 10−7 | 0.28 | 1.996 |
| tNR = 1 × 10−6 | 0.74 | 1.000 |
| Direct | 0.78 | 1.000 |
| Moment, MNm | Rel. Error (%) | |
|---|---|---|
| 3 Gaussian points | 6.2967 | 11.29 |
| 5 Gaussian points | 6.8607 | 3.34 |
| 7 Gaussian points | 7.0275 | 0.99 |
| 9 Gaussian points | 7.0981 | - |
| Average Length of the FE Sides | NDOF | Deflection d, mm | Relative Error, % | |||
|---|---|---|---|---|---|---|
| FE Mesh Pattern | FE Mesh Pattern | FE Mesh Pattern | ||||
| Structured | Unstructured | Structured | Unstructured | Structured | Unstructured | |
| h = L/4 | 75 | 81 | 8.87636 | 8.33342 | 2.19 | 8.85 |
| h = L/8 | 255 | 294 | 9.06101 | 8.93905 | 0.10 | 1.47 |
| h = L/16 | 969 | 1014 | 9.07437 | 9.03185 | 0.04 | 0.43 |
| h = L/32 | 3603 | 3597 | 9.06939 | 9.06250 | 0.01 | 0.09 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Smoljanović, H.; Balić, I.; Munjiza, A.; Hristovski, V. Rotation-Free Based Numerical Model for Nonlinear Analysis of Thin Shells. Buildings 2021, 11, 657. https://doi.org/10.3390/buildings11120657
Smoljanović H, Balić I, Munjiza A, Hristovski V. Rotation-Free Based Numerical Model for Nonlinear Analysis of Thin Shells. Buildings. 2021; 11(12):657. https://doi.org/10.3390/buildings11120657
Chicago/Turabian StyleSmoljanović, Hrvoje, Ivan Balić, Ante Munjiza, and Viktor Hristovski. 2021. "Rotation-Free Based Numerical Model for Nonlinear Analysis of Thin Shells" Buildings 11, no. 12: 657. https://doi.org/10.3390/buildings11120657