Research on the Nonlinear Stiffness Characteristics of Double-Row Angular Contact Ball Bearings under Different Working Conditions


Abstract
:1. Introduction
2. Theoretical Analysis
- (1)
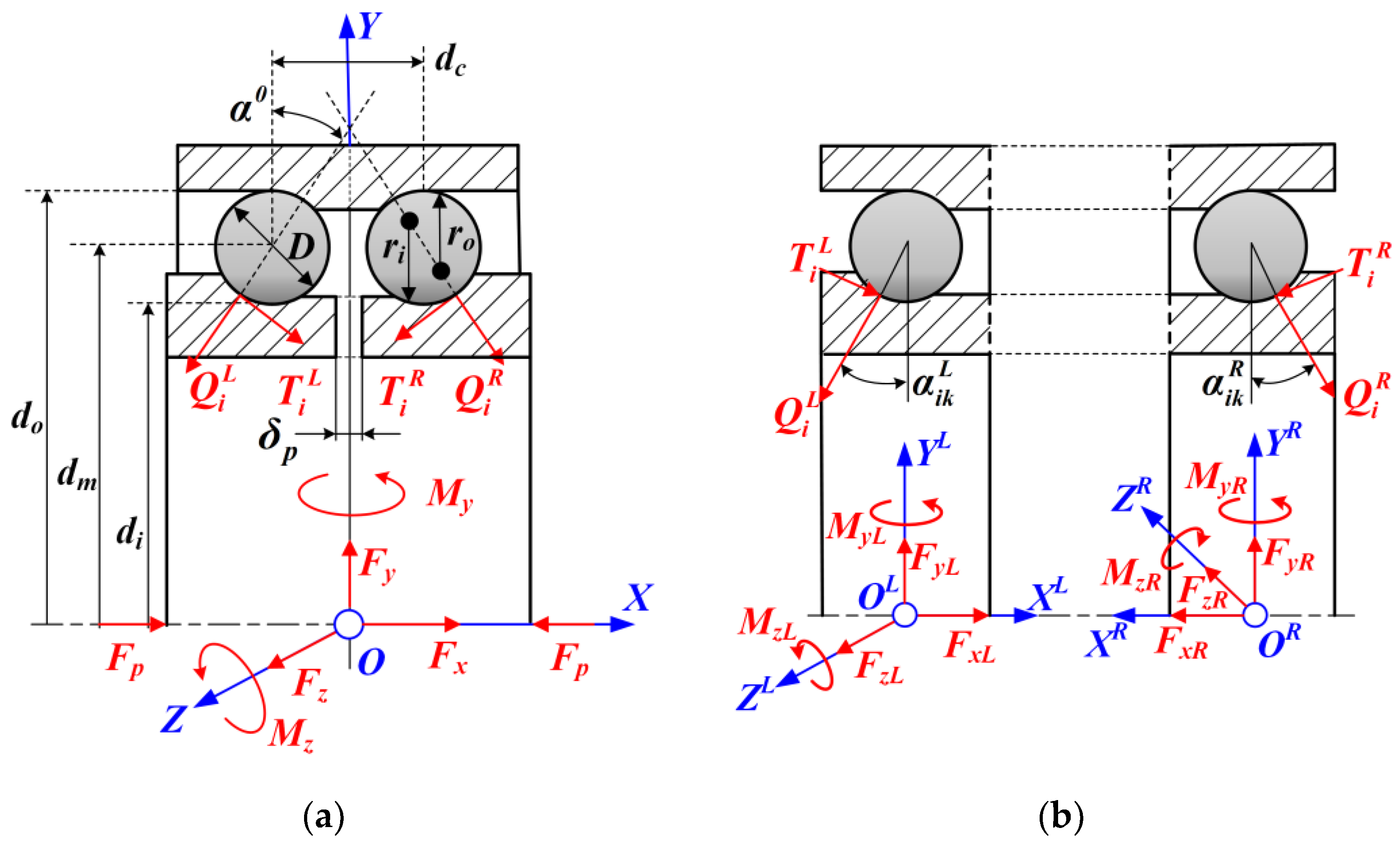
- Two SR-ACBBs have the same structural parameters, that is, the raceway contact curvature radii ri and ro, the raceway contact diameters di and do, and the ball diameter and number D and Z, respectively;
- (2)
- The influence of the lubrication and cage is not considered;
- (3)
- The outer raceway is fixed while the inner ring moves and rotates with the central shaft.
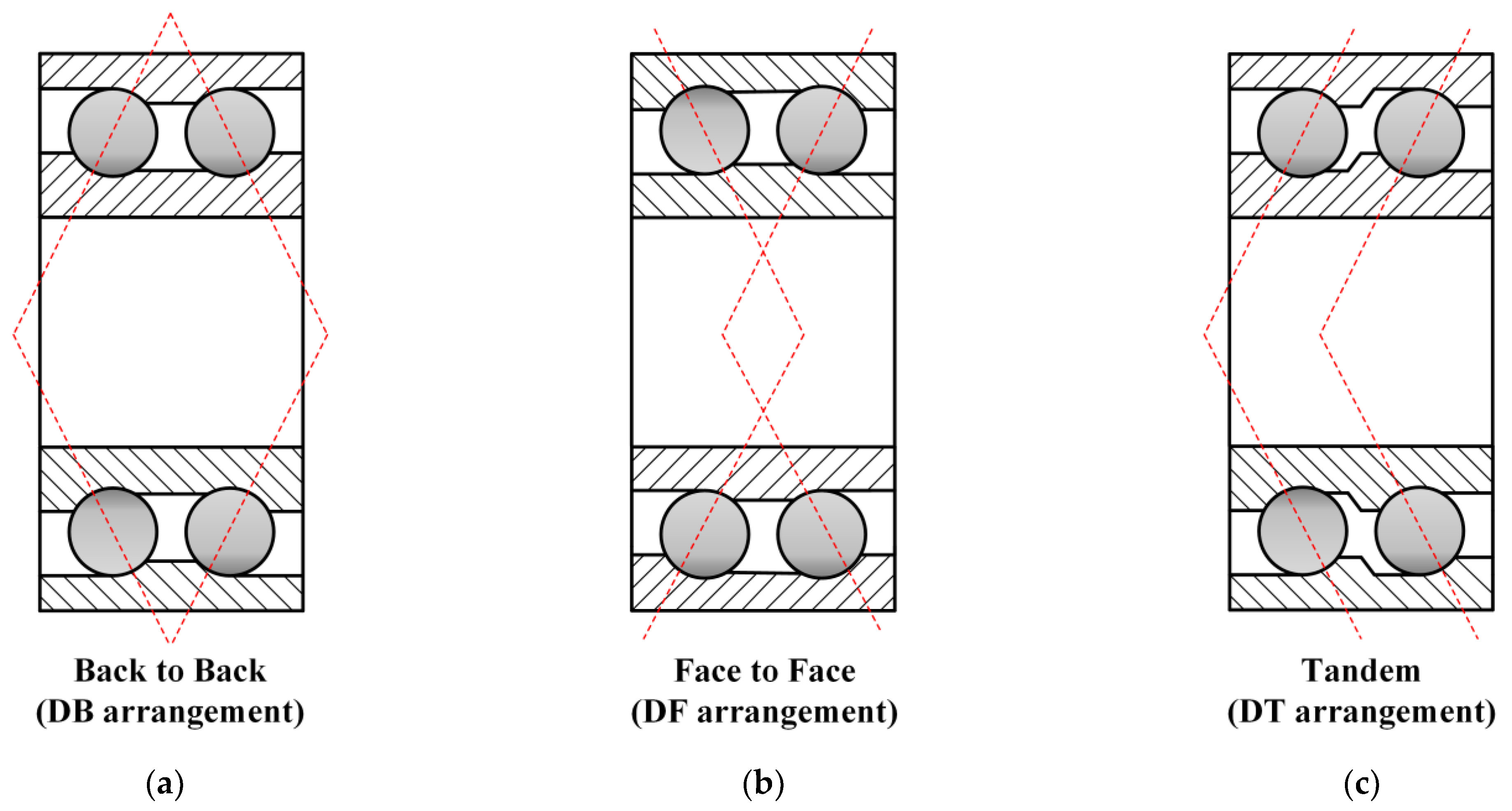
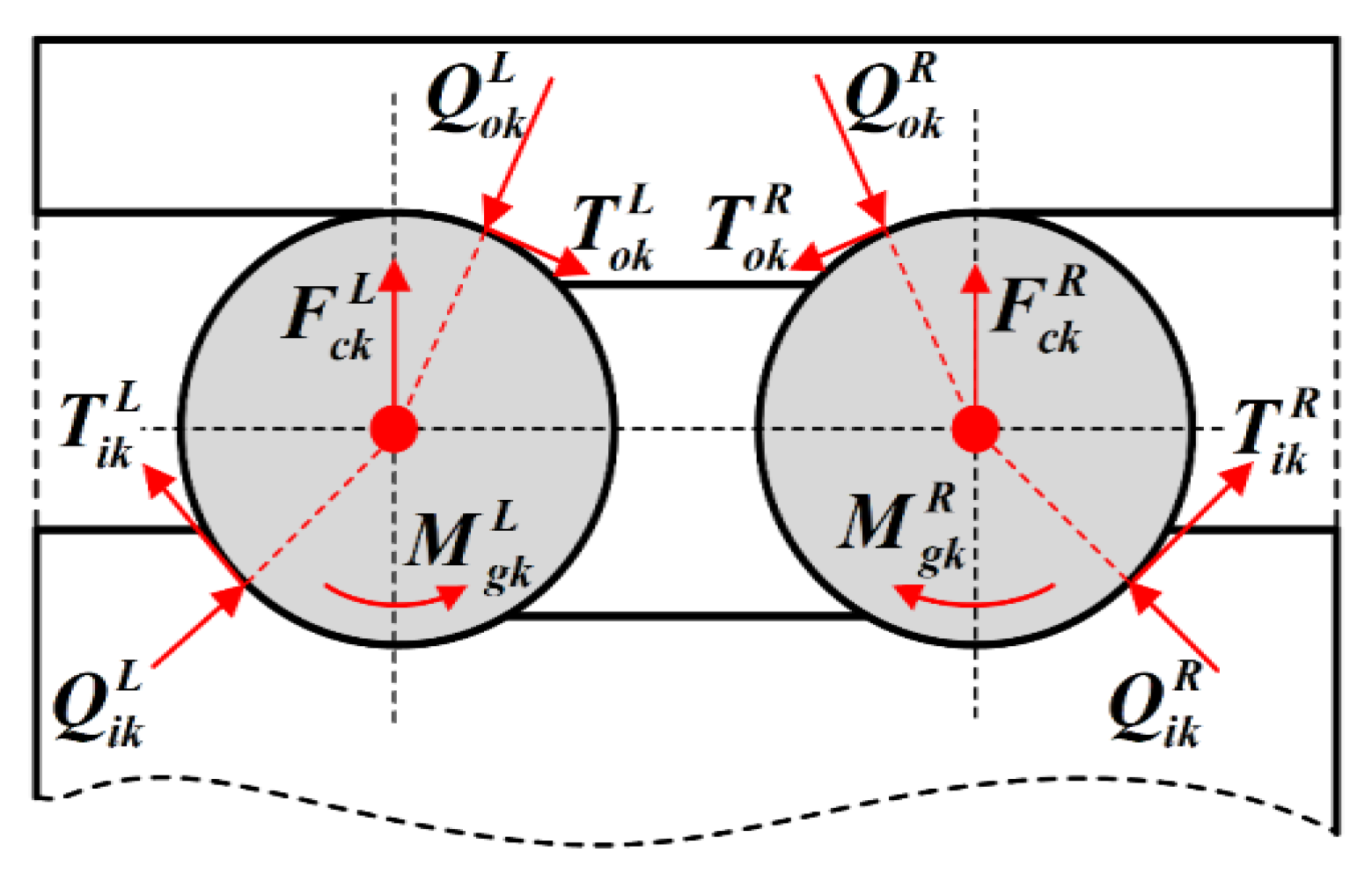
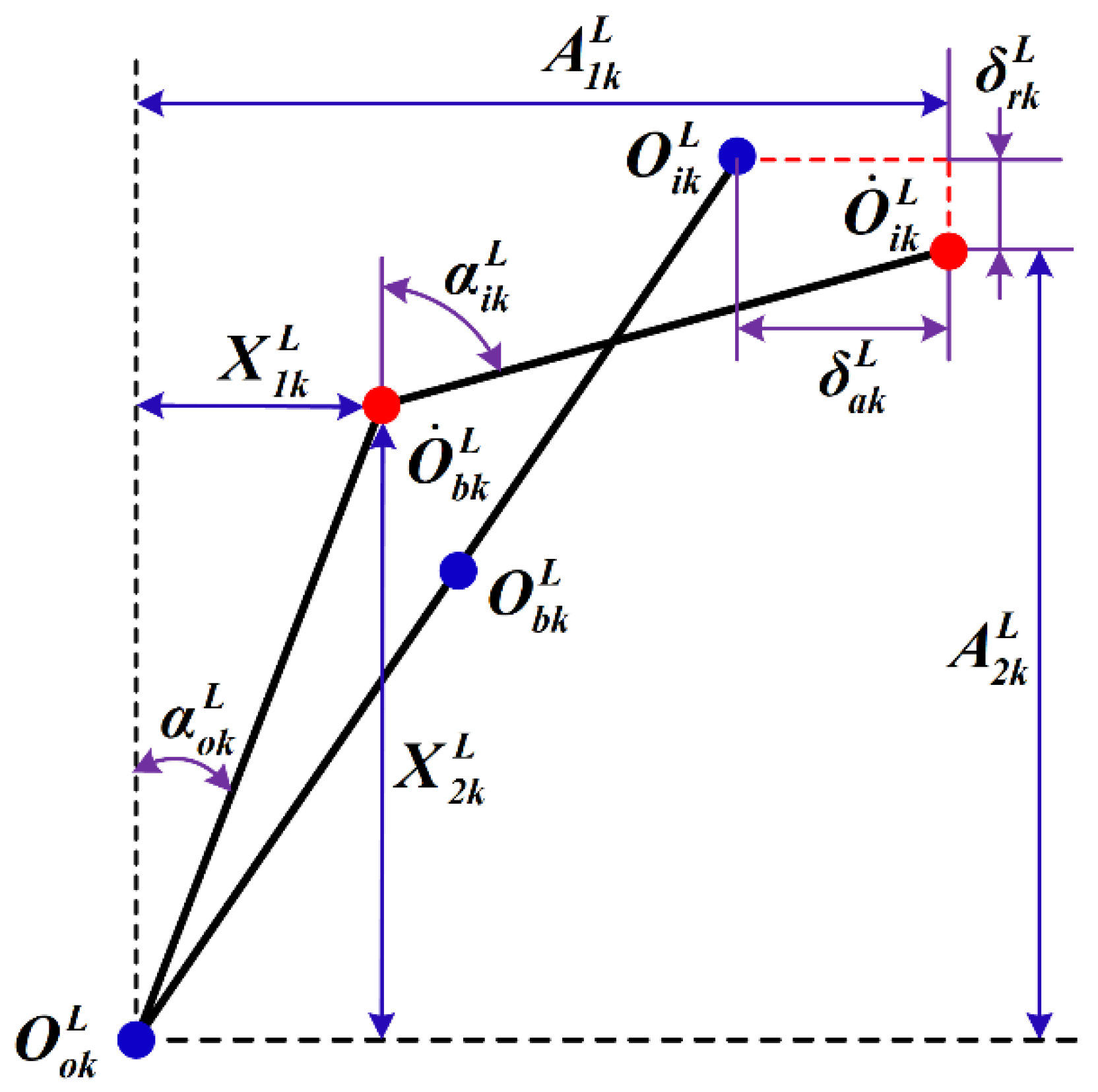
2.1. Mechanics Analysis of DR-ACBB
- i.
- DF arrangement:
- ii.
- DT arrangement:
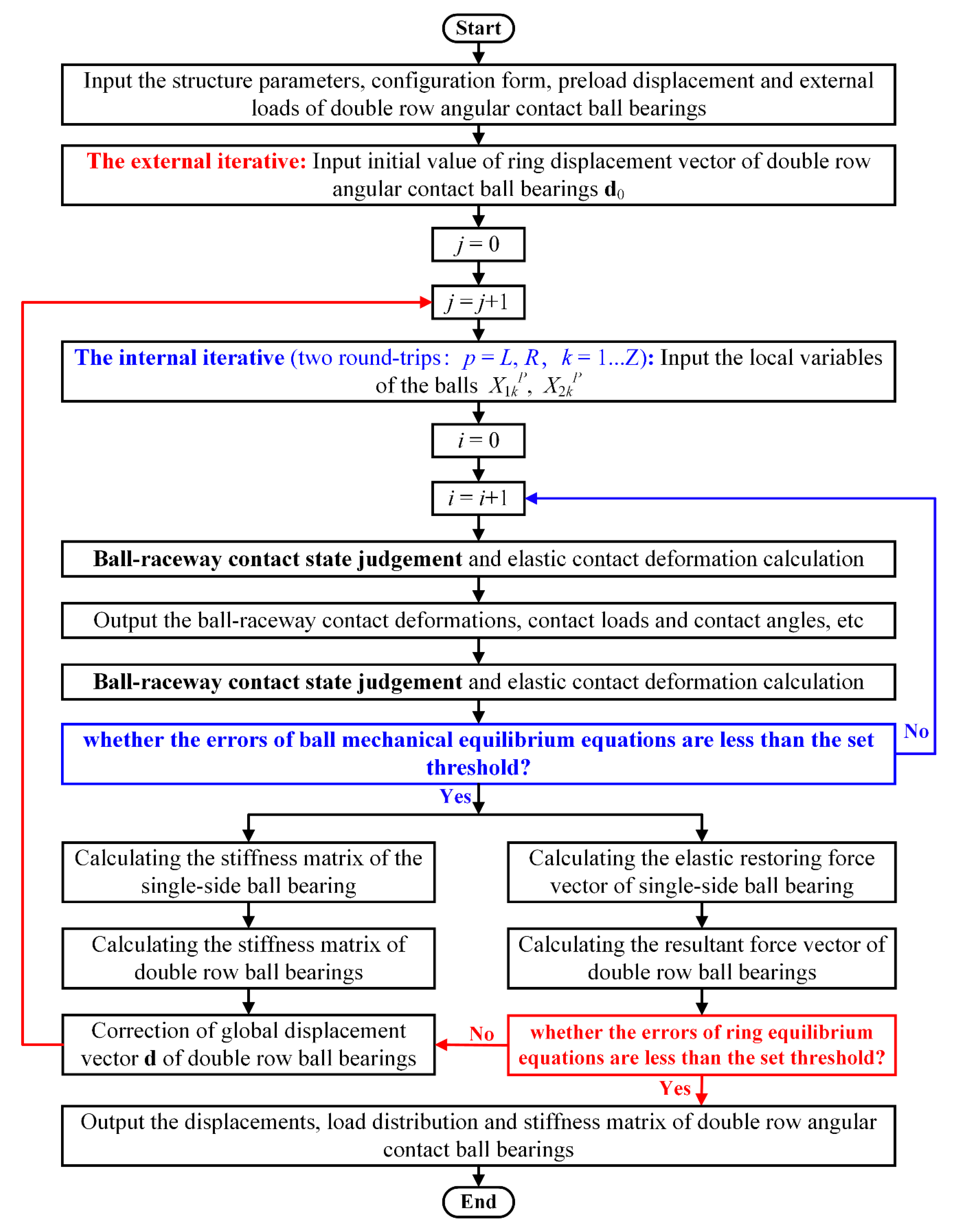
2.2. Iterative Calculation of the Proposed Model
2.3. Analytical Formulation of the Stiffness Matrix of DR-ACBB
3. Numerical Simulation and Discussions
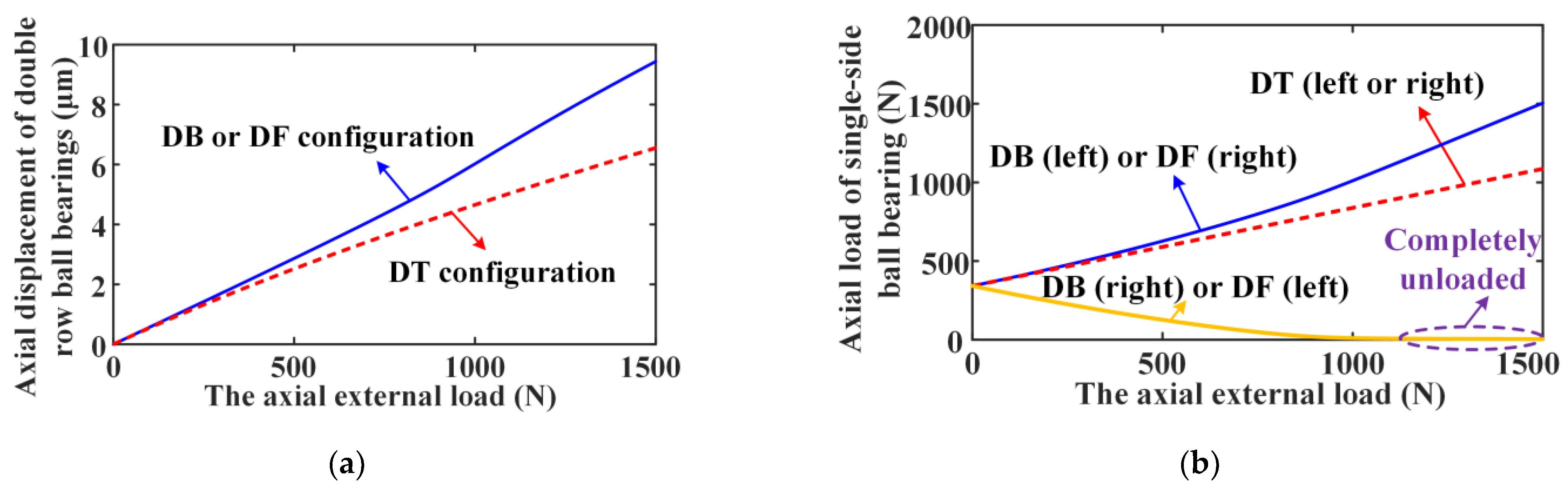
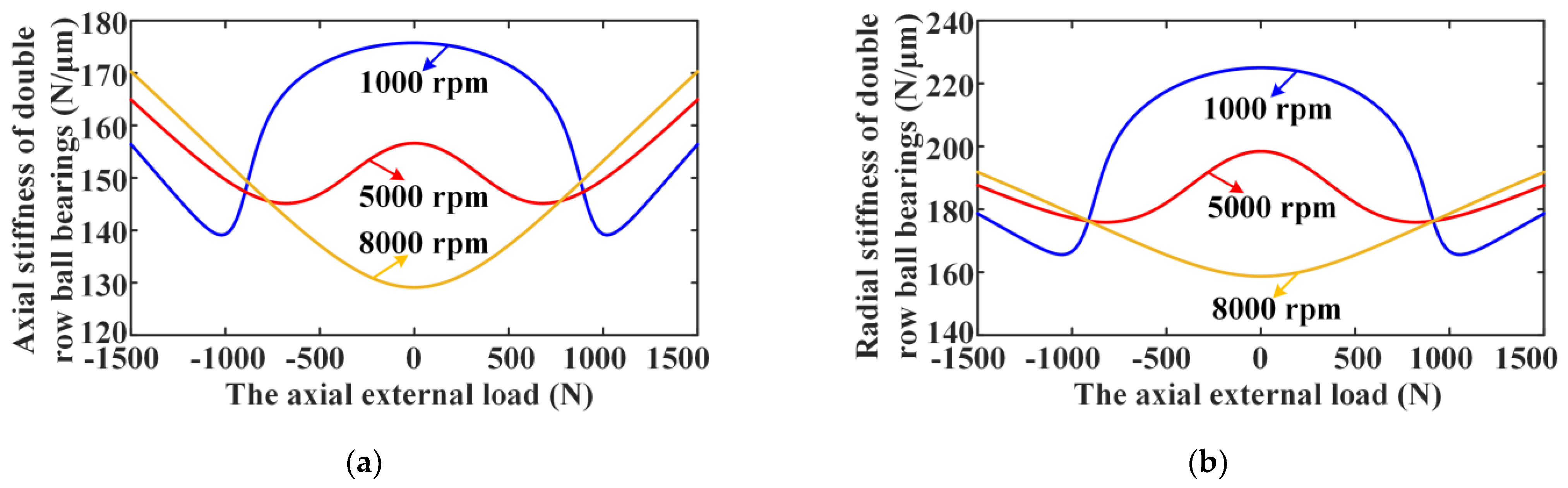
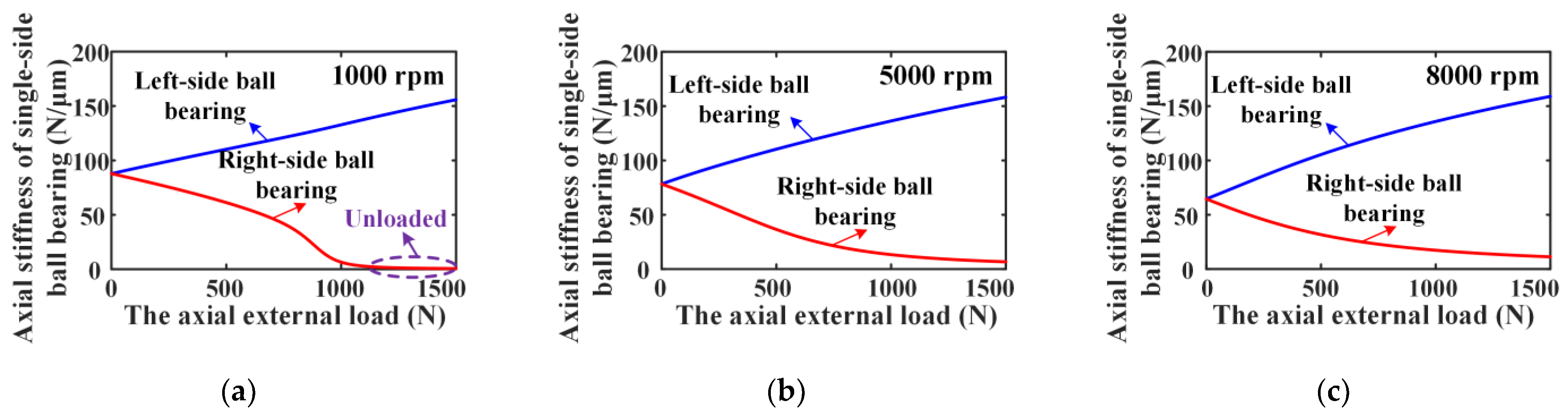
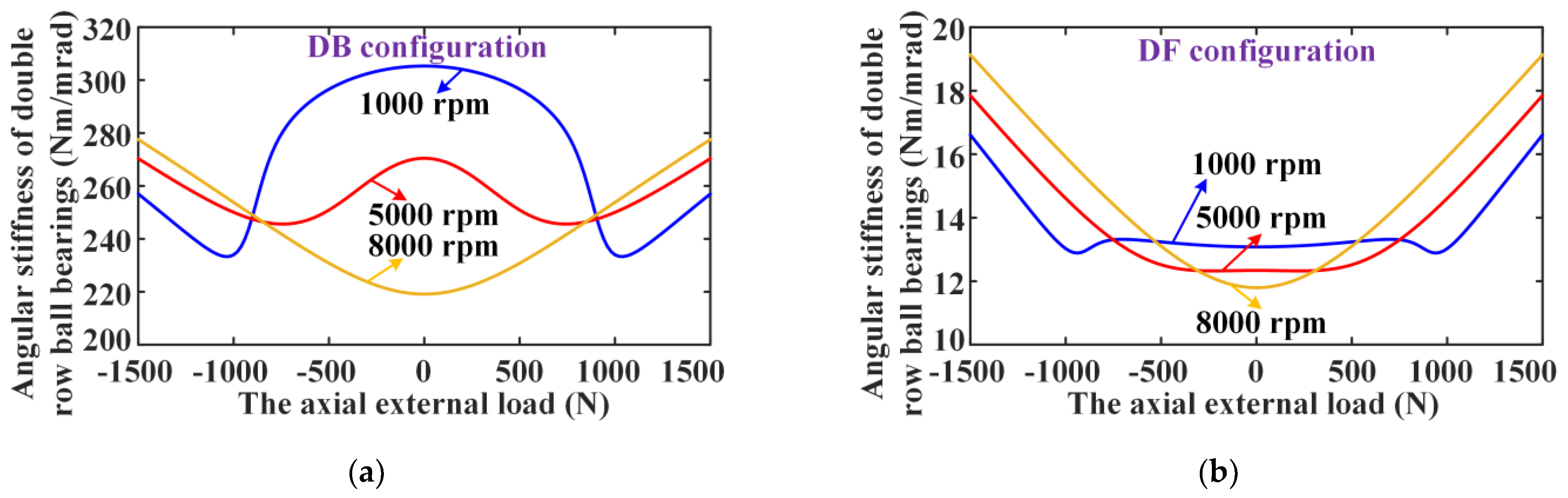
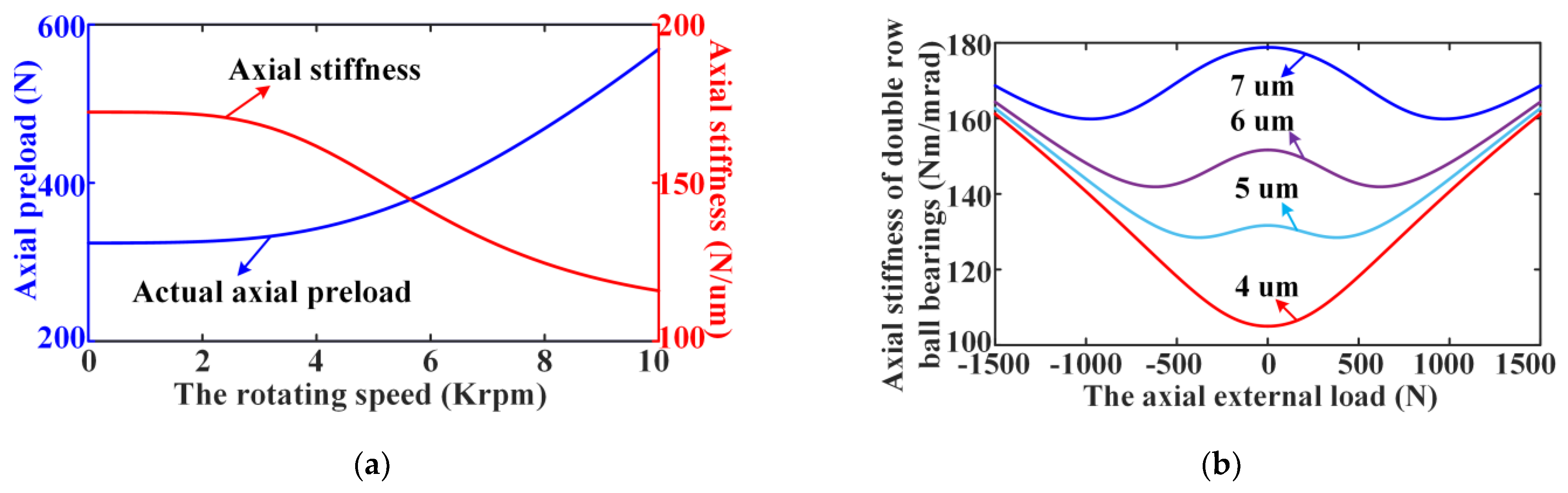
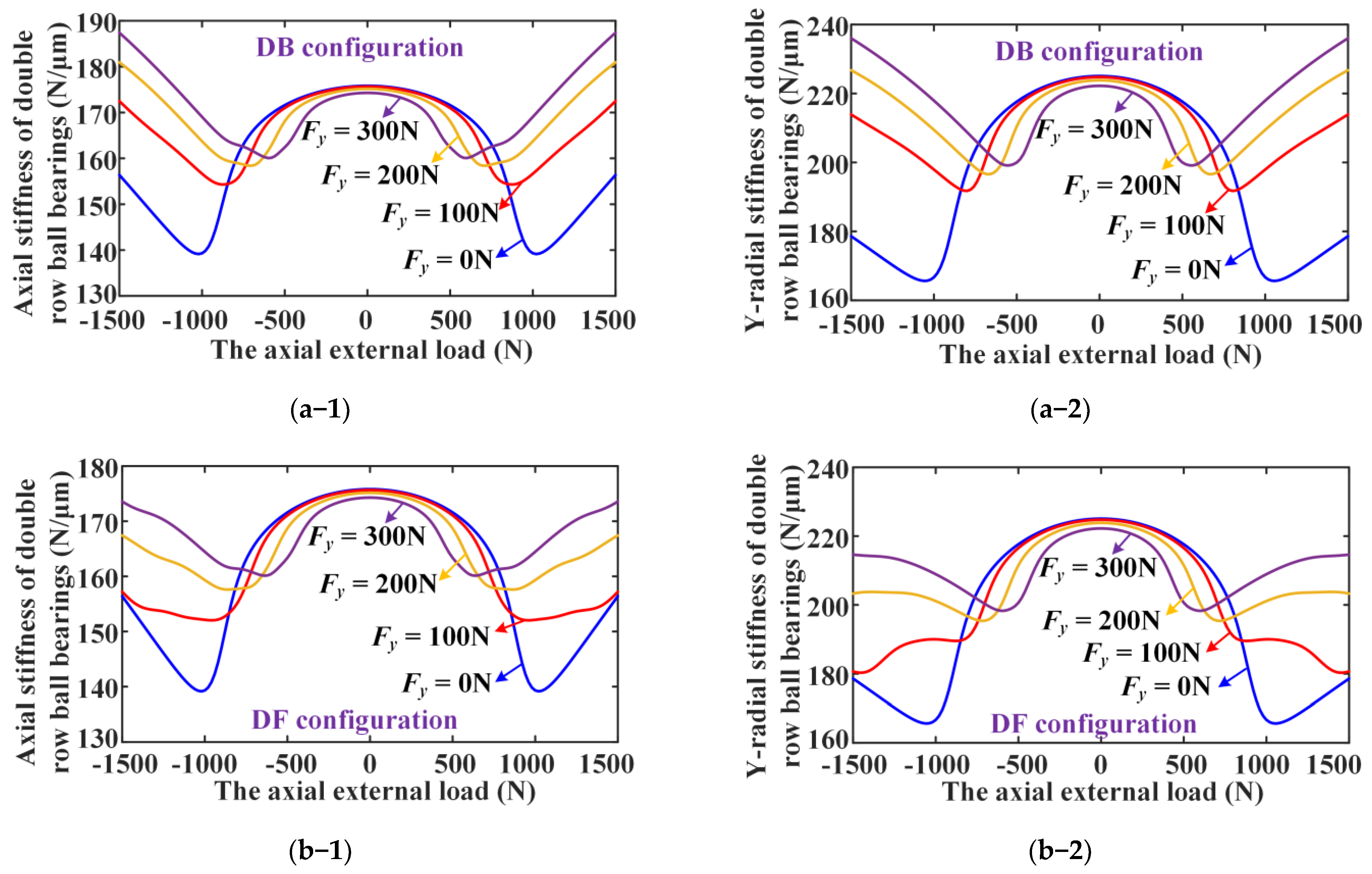
3.1. Analysis of Nonlinear Stiffness Characteristic of the Axially Loaded DR-ACBB
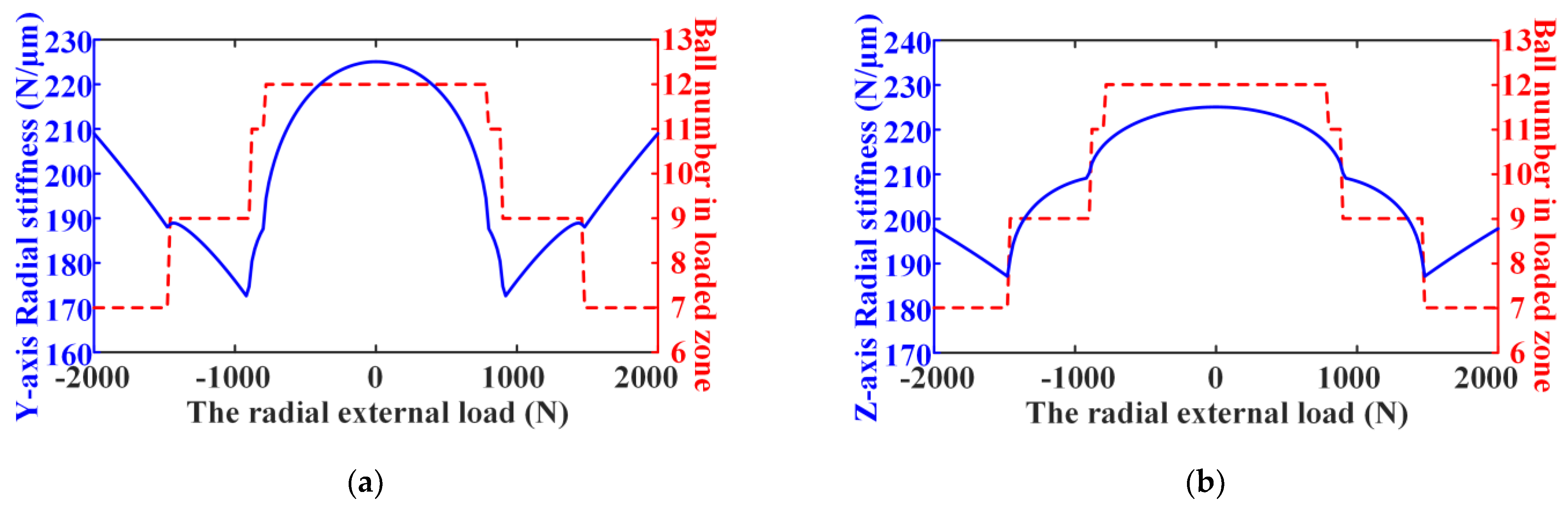
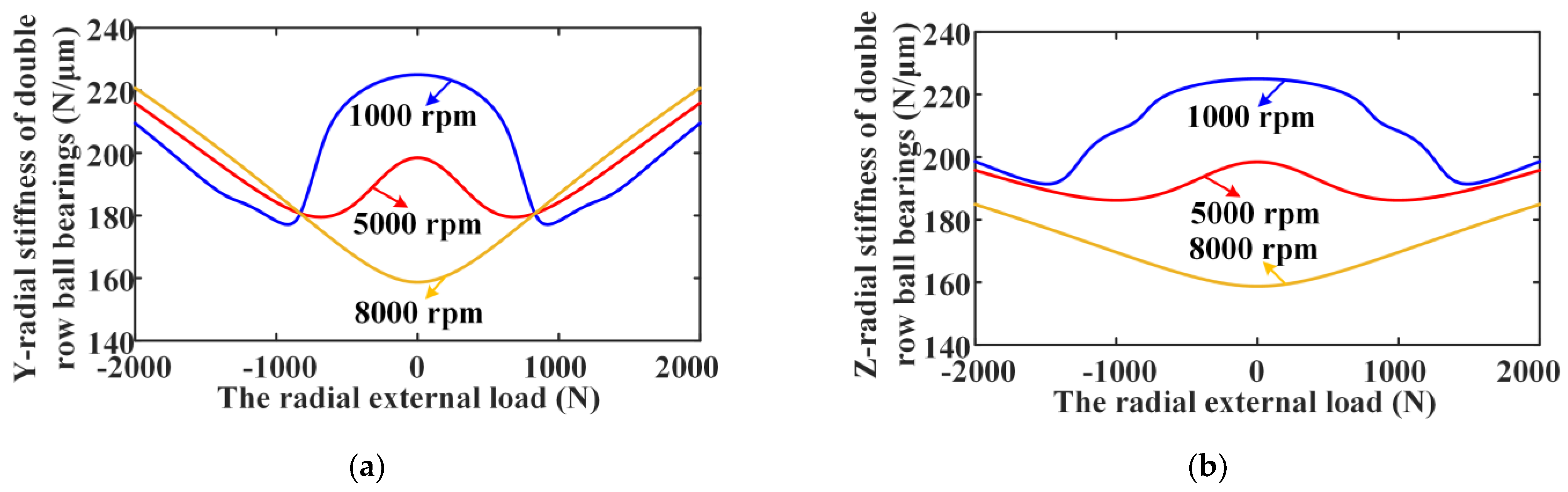
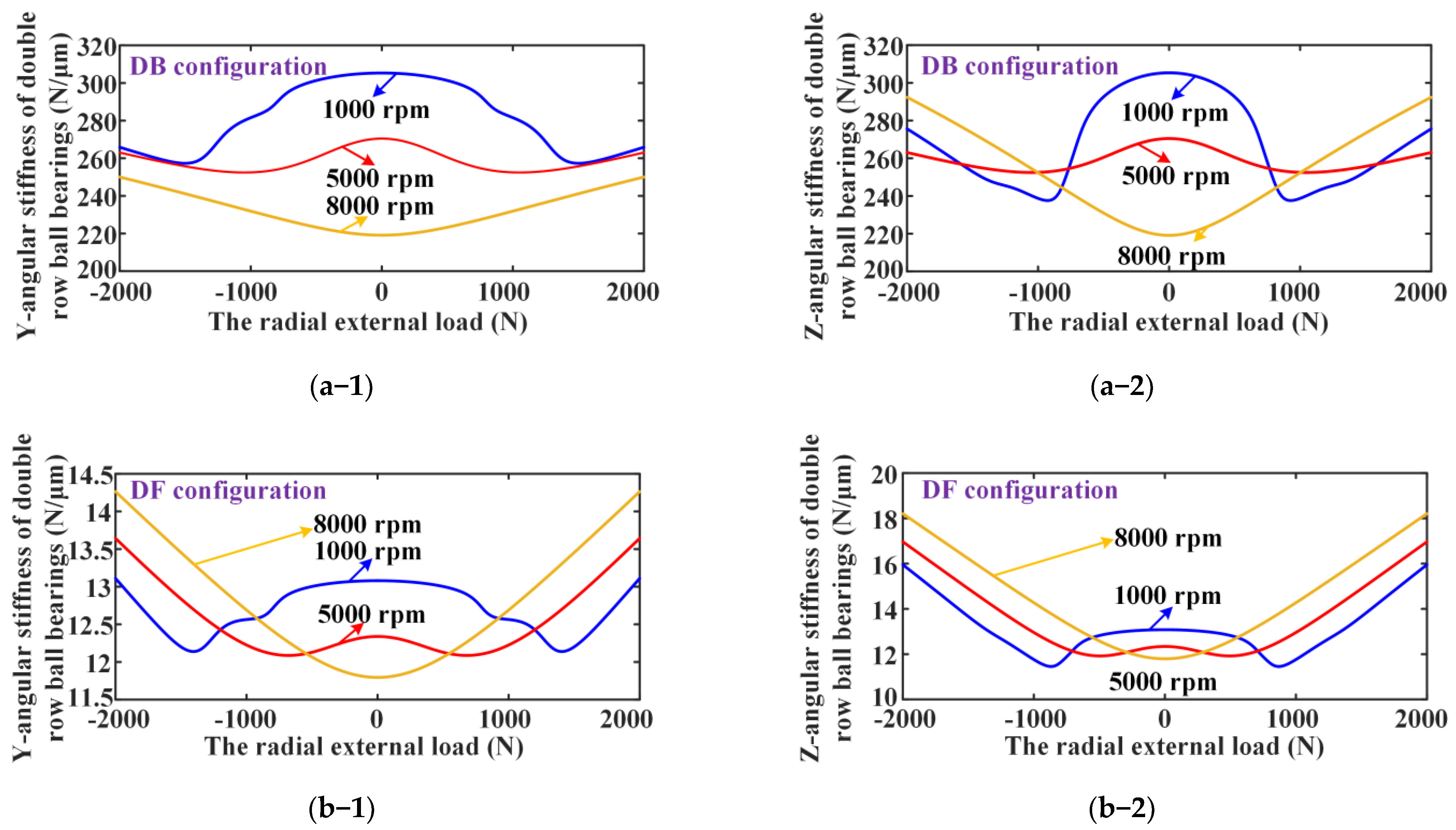
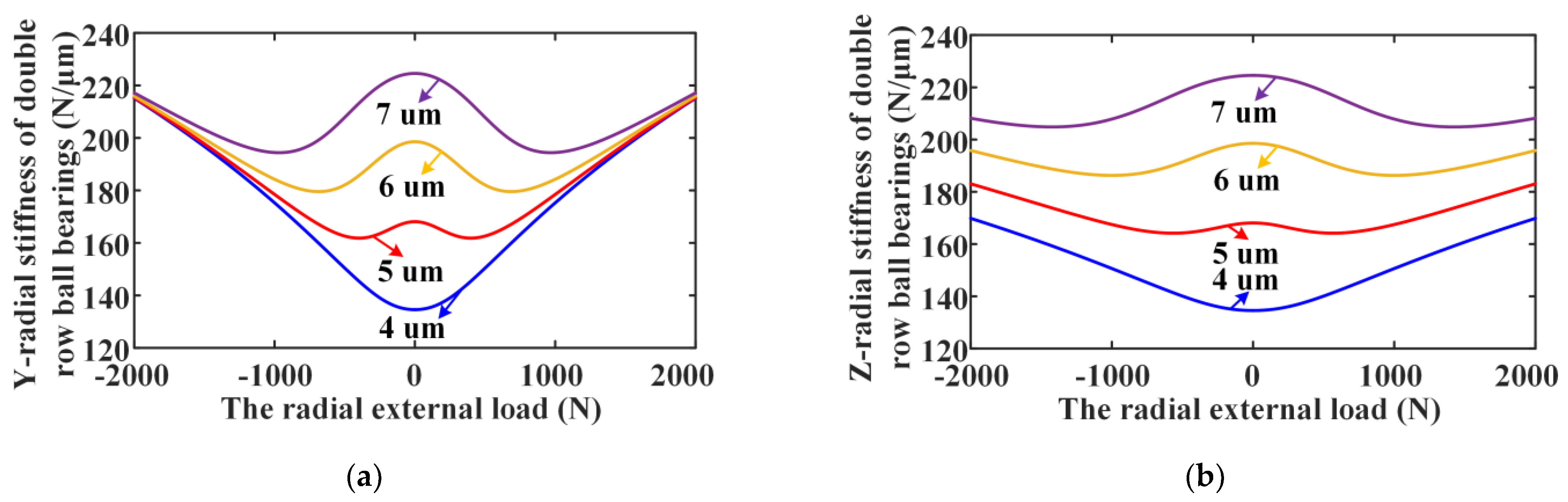
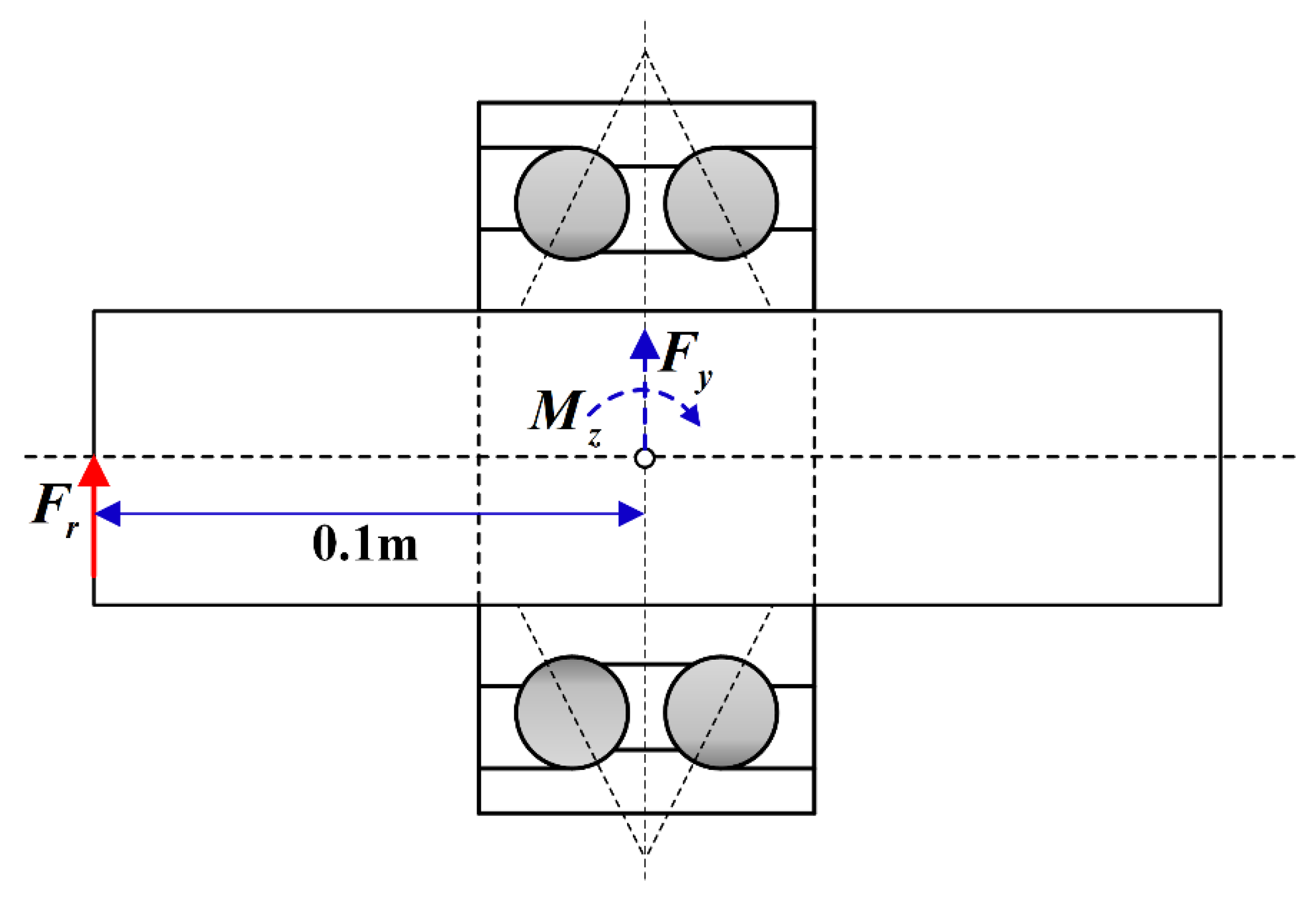
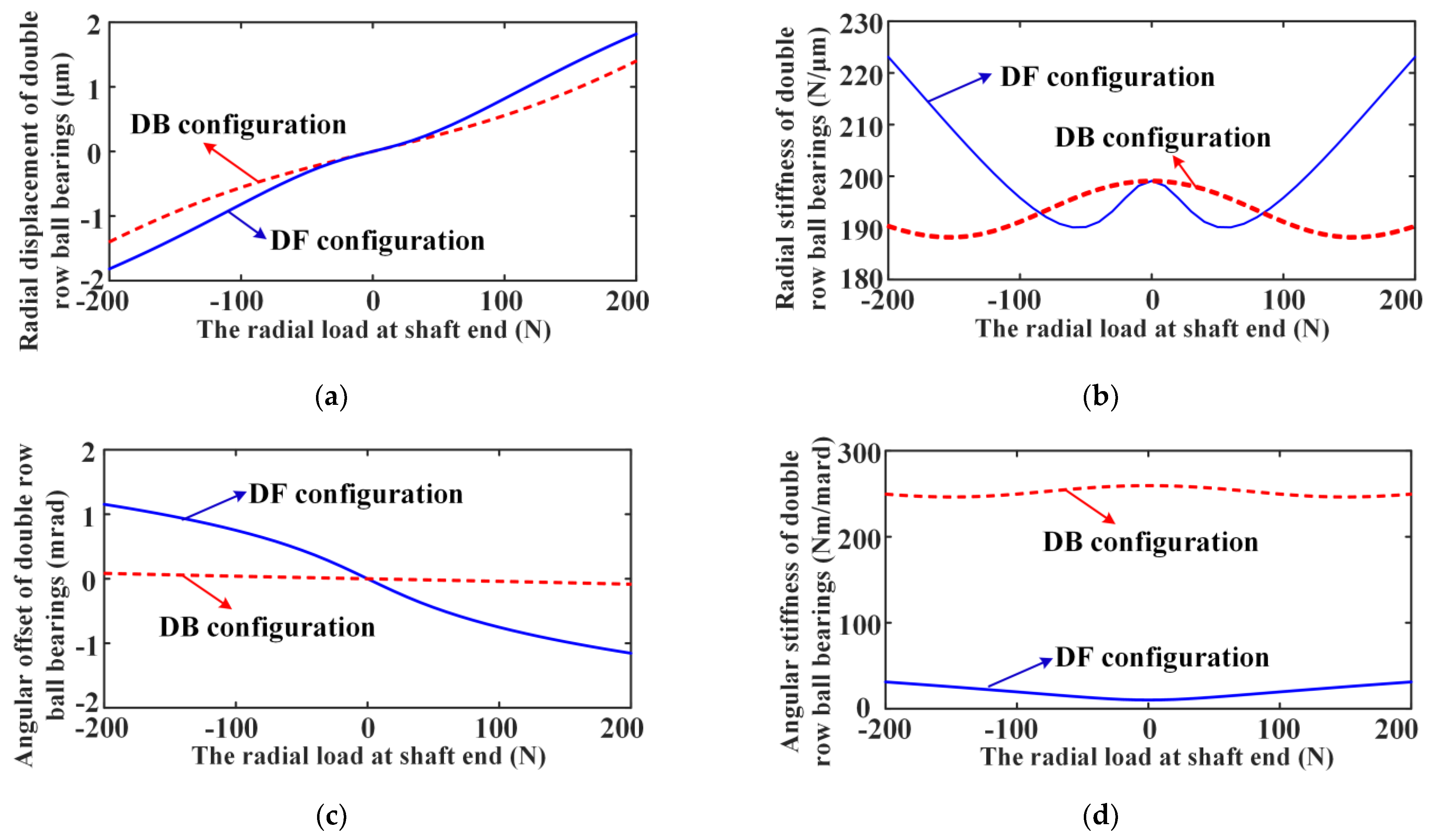
3.2. Analysis of Nonlinear Stiffness Characteristic of the Radially Loaded DR-ACBB
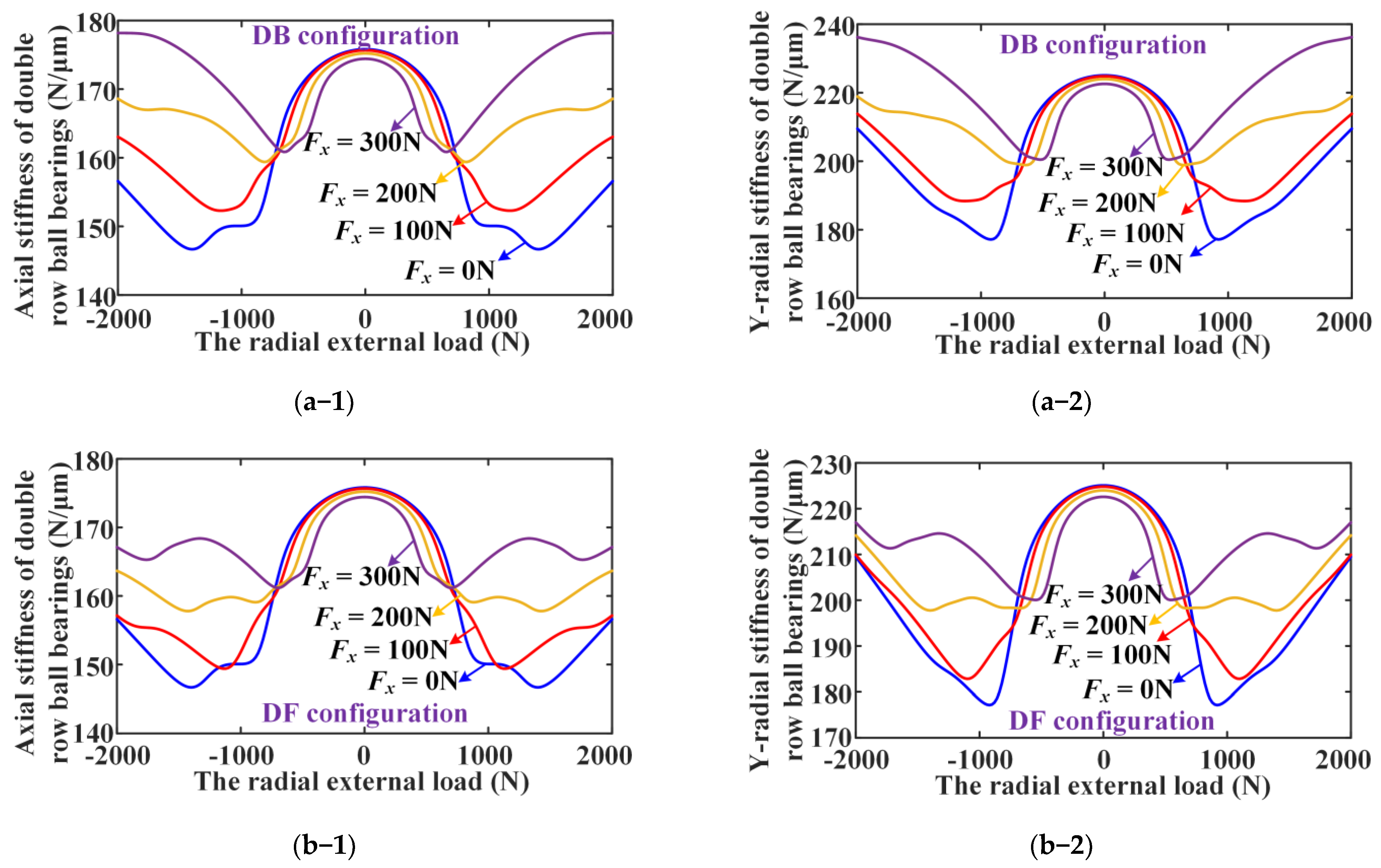
3.3. Analysis of Nonlinear Stiffness Characteristic of the Combined-Loaded DR-ACBB
4. Conclusions
- (1)
- DR-ACBBs under DB and DF configurations have the same variation rule in axial and radial stiffness, and DR-ACBBs under DB and DF configurations show the nonlinear spring characteristics of soft first and then hard with the increase in external load;
- (2)
- The SR-ACBB or part of the balls may be unloaded for DR-ACBB under the large load ranges, which further leads to the sudden change in the nonlinear stiffness characteristics of DR-ACBB;
- (3)
- The initial preload has a great influence on the nonlinear stiffness characteristics of DR-ACBB, and it can effectively increase the external load range corresponding to the stiffness attenuation of DR-ACBB;
- (4)
- DR-ACBB under a DB configuration have higher angular stiffness and bending moment resistance than those of DR-ACBB under a DF configuration.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bercea, I.; Nelias, D.; Cavallaro, G. A unified and simplified treatment of the non-linear equilibrium problem of double-row rolling bearings. Part 1: Rolling bearing model. Proc. Inst. Mech. Eng. Part J.-J. Eng. Tribol. 2003, 217, 205–212. [Google Scholar] [CrossRef]
- Gunduz, A.; Singh, R. Stiffness matrix formulation for double row angular contact ball bearings: Analytical development and validation. J. Sound Vib. 2013, 332, 5898–5916. [Google Scholar] [CrossRef]
- Gunduz, A.; Dreyer, J.T.; Singh, R. Effect of bearing preloads on the modal characteristics of a shaft-bearing assembly: Experiments on double row angular contact ball bearings. Mech. Syst. Signal. Pr. 2012, 31, 176–195. [Google Scholar] [CrossRef]
- Petersen, D.; Howard, C.; Prime, Z. Varying stiffness and load distributions in defective ball bearings: Analytical formulation and application to defect size estimation. J. Sound Vib. 2015, 337, 284–300. [Google Scholar] [CrossRef]
- Xu, T.; Yang, L.; Wu, W.; Wang, K. Effect of angular misalignment of inner ring on the contact characteristics and stiffness coefficients of duplex angular contact ball bearings. Mech. Mach. Theory. 2021, 157, 104178. [Google Scholar] [CrossRef]
- Poplawski, J.V.; Maureillo, J.A. Skidding in Lightly Loaded High Speed Ball Thrust Bearings; ASME: New York, NY, USA, 1969. [Google Scholar]
- Harris, T.A. An analytical method to predict skidding in thrust-loaded, angular-contact ball bearings. J. Lubr. Technol. 1971, 93, 17–23. [Google Scholar] [CrossRef]
- Harris, T.A. Ball motion in thrust-loaded, angular contact bearings with Coulomb friction. J. Lubr. Technol. 1971, 93, 32–38. [Google Scholar] [CrossRef]
- Harris, T.A. Rolling Bearing Analysis, 4th ed.; John Wiley and Sons, Inc.: New York, NY, USA, 2000. [Google Scholar]
- Ding, C.A.; Zhou, F.Z.; Zhu, J.; Zhang, L. Raceway control assumption and the determination of rolling element attitude angle. Chin. J. Mech. Eng. 2001, 37, 58–61. [Google Scholar] [CrossRef]
- Tomović, R. Calculation of the boundary values of rolling bearing deflection in relation to the number of active rolling elements. Mech. Mach. Theory. 2012, 47, 74–88. [Google Scholar] [CrossRef]
- Tomović, R. Calculation of the necessary level of external radial load for inner ring support on q, rolling elements in a radial bearing with internal radial clearance. Int. J. Mech. Sci. 2012, 60, 23–33. [Google Scholar] [CrossRef]
- Wang, W.Z.; Hu, L.; Zhang, S.G.; Zhao, Z.Q.; Ai, S.Y. Modeling angular contact ball bearing without raceway control hypothesis. Mech. Mach. Theory. 2014, 82, 154–172. [Google Scholar] [CrossRef]
- Yan, K.; Wang, Y.; Zhu, Y.; Hong, J.; Zhai, Q. Investigation on Heat Dissipation Characteristic of Ball Bearing Cage and Inside Cavity at Ultra High Rotation Speed. Tribol. Int. 2016, 93, 470–481. [Google Scholar] [CrossRef]
- Yang, Z.; Yu, T.; Zhang, Y.; Sun, Z. Influence of Cage Clearance on the Heating Characteristics of High-Speed Ball Bearings. Tribol. Int. 2017, 105, 125–134. [Google Scholar] [CrossRef]
- Ren, X.; Zhai, J.; Ren, G. Calculation of radial load distribution on ball and roller bearings with positive, negative and zero clearance. Int. J. Mech. Sci. 2017, 131, 1–7. [Google Scholar]
- Liu, J.; Shao, Y. Dynamic modeling for rigid rotor bearing systems with a localized defect considering additional deformations at the sharp edges. J. Sound. Vib. 2017, 398, 84–102. [Google Scholar] [CrossRef]
- Liu, J. A dynamic modelling method of a rotor-roller bearing-housing system with a localized fault including the additional excitation zone. J. Sound. Vib. 2020, 469, 115144. [Google Scholar] [CrossRef]
- Gargiulo, E.P. A Simple Way to Estimate Bearing Stiffness. Mach. Des. 1980, 52, 107–110. [Google Scholar]
- Wardle, F.P.; Lacey, S.J.; Poon, S.Y. Dynamic and static characteristics of a wide speed range machine tool spindle. Precis. Eng. 1983, 5, 175–183. [Google Scholar] [CrossRef]
- Lim, C.T.; Singh, R. Vibration transmission through rolling element bearings, part I: Bearing stiffness formulation. J. Sound Vib. 1990, 139, 179–199. [Google Scholar] [CrossRef]
- Lim, C.T.; Singh, R. Vibration transmission through rolling element bearings, part II: System studies. J. Sound Vib. 1990, 139, 201–225. [Google Scholar] [CrossRef]
- Lim, C.T.; Singh, R. Vibration transmission through rolling element bearings, Part III: Geared rotor system studies. J. Sound Vib. 1991, 151, 31–54. [Google Scholar] [CrossRef]
- Houpert, L. A uniform analytical approach for ball and roller bearings calculations. J. Tribol. 1997, 119, 851–858. [Google Scholar] [CrossRef]
- Hernot, X.; Sartor, M.; Guillot, J. Calculation of the stiffness matrix of angular contact ball bearings by using the analytical approach. J. Mech. Des. 2000, 122, 83–90. [Google Scholar] [CrossRef]
- Sheng, X.; Li, B.; Wu, Z.; Li, H. Calculation of ball bearing speed-varying stiffness. Mech. Mach. Theory. 2014, 81, 166–180. [Google Scholar] [CrossRef]
- Noel, D.; Ritou, M. Complete analytical expression of the stiffness matrix of angular contact ball bearings. J. Tribol. 2013, 135, 041101. [Google Scholar] [CrossRef]
- Liu, J.; Tang, C.; Wu, H.; Xu, Z.; Wang, L. An analytical calculation method of the load distribution and stiffness of an angular contact ball bearing. Mech. Mach. Theory. 2019, 142, 103597. [Google Scholar] [CrossRef]
- While, M.F. Rolling element bearing vibration transfer characteristics: Effect of stiffness. J. Appl. Mech. 1979, 46, 677–684. [Google Scholar] [CrossRef]
- Yang, Z.H.; Li, B.T.; Yu, T.X. Influence of structural parameters and tolerance on stiffness of high-speed ball bearings. Int. J. Precis. Eng. Man. 2016, 17, 1493–1501. [Google Scholar] [CrossRef]
- Yang, Z.; Chen, H.; Yu, T. Effects of rolling bearing configuration on stiffness of machine tool spindle, P. I. Mech. Eng. C.-J. Mec. 2018, 232, 775–785. [Google Scholar] [CrossRef]
- Li, J.; Zhu, Y.; Yan, K.; Yan, X.; Liu, Y.; Hong, J. Research on the axial stiffness softening and hardening characteristics of machine tool spindle system. Int. J Adv. Manuf. Tech. 2018, 99, 951–963. [Google Scholar] [CrossRef]
- Zhang, J.; Fang, B.; Zhu, Y.; Hong, J. A comparative study and stiffness analysis of angular contact ball bearings under different preload mechanisms. Mech. Mach. Theory. 2017, 115, 1–17. [Google Scholar] [CrossRef]
- Zhang, J.; Fang, B.; Hong, J.; Wan, S.; Zhu, Y. A general model for preload calculation and stiffness analysis for combined angular contact ball bearings. J. Sound. Vib. 2017, 411, 435–449. [Google Scholar] [CrossRef]
- Fang, B.; Zhang, J.; Yan, K.; Hong, J.; Wang, M. A comprehensive study on the speed-varying stiffness of ball bearing under different load conditions. Mech. Mach. Theory 2019, 136, 1–13. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | 320 |
|---|---|
| Curvature radius (inner-raceway) ri (mm) | 4.54 |
| Curvature radius (outer-raceway) ro (mm) | 4.54 |
| Contact diameter (inner-raceway) di (mm) | 61.22 |
| Contact diameter (outer-raceway) do (mm) | 78.78 |
| Ball number Z | 12 |
| Ball diameter D (mm) | 8.73 |
| Pitch diameter dm (mm) | 70 |
| Preload displacement (μm) | 12 |
| Radial clearance (μm) | 100 |
| The ball center distance (mm) | 15 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fang, B.; Zhang, J.; Hong, J.; Yan, K. Research on the Nonlinear Stiffness Characteristics of Double-Row Angular Contact Ball Bearings under Different Working Conditions. Lubricants 2023, 11, 44. https://doi.org/10.3390/lubricants11020044
Fang B, Zhang J, Hong J, Yan K. Research on the Nonlinear Stiffness Characteristics of Double-Row Angular Contact Ball Bearings under Different Working Conditions. Lubricants. 2023; 11(2):44. https://doi.org/10.3390/lubricants11020044
Chicago/Turabian StyleFang, Bin, Jinhua Zhang, Jun Hong, and Ke Yan. 2023. "Research on the Nonlinear Stiffness Characteristics of Double-Row Angular Contact Ball Bearings under Different Working Conditions" Lubricants 11, no. 2: 44. https://doi.org/10.3390/lubricants11020044