
On the Legal and Economic Implications of Tele-Driving


1
TalTech Law School, Tallinn University of Technology, 12616 Tallinn, Estonia
2
Department of Business Administration, Tallinn University of Technology, 12616 Tallinn, Estonia
3
Wismar Business School, Wismar University of Applied Sciences, 23966 Wismar, Germany
*
Author to whom correspondence should be addressed.
Machines 2023, 11(3), 331; https://doi.org/10.3390/machines11030331
Submission received: 22 December 2022
/
Revised: 19 February 2023
/
Accepted: 21 February 2023
/
Published: 27 February 2023
(This article belongs to the Special Issue Autonomous Driving: Advancements in Cognitive Perception Systems for Increased Level Autonomy)
{kind=link}
Abstract
:While the idea of autonomous vehicles has been enthusiastically embraced by scientists and commercial markets alike, ranging from solving the last mile problem across shared economy models in various segments to human transportation logistics, more than just a few aspects require further development before driverless urban logistics can be organized more thoroughly and meaningfully for our practical purposes. Before fully autonomous vehicles become standard, many of these shortcomings can be addressed (in part) by the remote operation of vehicles. Besides the various technological challenges, remote operation of vehicles also has many important legal and economic implications, impacting a wide area, including data protection, liability for torts performed, and mundane fields such as road traffic law. Based on a case study of a start-up developing remote operation solutions in Germany (Vay), this paper analyses and further develops the regulatory framework of remote operation solutions by highlighting their legal and economic implications. Since remote operation solutions are comprised of cyber-physical systems, this research is located in the context of Smart Cities and Industry 5.0, i.e., our research contributes to the related regulatory framework of the Smart City concept as well as to Industry 5.0 in international terms. Finally, the paper discusses future perspectives and proposes specific modes of compliance.
1. Introduction
The logistics sector currently faces economic challenges due to high fuel and energy costs, so several logistics business models are put under pressure. A large number of initiatives started a push for innovations to reduce logistics costs or expand the service portfolio in order to maintain the current cost structure. One important direction for future logistics innovations focuses on using autonomous transport devices as delivery robots or other autonomously driven vehicles; another direction considers the development of service design models that are realized by companies such as Uber or Yandex [1,2,3]. Recent logistics innovations highlight sustainable and environmental goals by advocating electric vehicles or car sharing concepts as a first step towards circular economy approaches in the logistics sector.
Unfortunately, existing technologies are still far from being mature enough to be realized in daily business, so transitional technologies are needed to bridge the time until self-driving vehicles or autonomous delivery robots can take over full control of public transportation. Such bridging technology is considered remote operation (one form of assisted driving and remote-driving or tele-driving), which in Europe as in the U.S.A. [4] is dominated mainly by start-ups, such as e.g., Vay Technologies from Berlin [5], Fernride from Munich [6] or most recently Elmo from Tallinn [7].
On 12 July 2021, Germany promulgated the “Act on Autonomous Driving” [8], which on 22 June 2022, was specified by a corresponding regulation (Autonomous Driving Regulation) implementing the technical details [9]. While keeping to the restrictions that autonomous vehicles must still be operated within a defined territory and must be overseen by trained technicians, both the Act and the respective regulation now also permit these vehicles to be operated remotely, and numerous additional vehicles may be operated by one technician at a time [10]. Economically, this reform makes remote driving especially attractive, as a small team located in a central command centre may now supervise an entire fleet of otherwise autonomous taxis or delivery vans, which can also easily be extended to autonomous buses serving rural and country areas with sparse public transport facilities. Further potential provides for delivery of packages and parcels using delivery robots [1], car valet parking services, or as recently established at Tallinn University of Technology [11]—internal, on-campus transportation of students at universities and other entities exposed to high levels of human mobility.
In contrast to the U.S., where neither autonomous nor remote driving are regulated on a federal level, Germany now provides comprehensive legal regulation for SAE Level 4 automation, which applies nationwide. The German companies Vay and Fernride currently dominate the tele-driving market there by offering technical solutions for cars [5] and trucks [6] and, by doing so, challenging the market for land-based transport robots and also requiring new regulatory frameworks for public transportation. The case of Vay is used as a case study in this paper. It is of special interest because this start-up offers new services for car-based mobility at lower cost base levels than existing logistics solutions. Otherwise, the remote driving approach also provides opportunities to expand and enhance the service portfolio for car sharing companies, which at present suffer from unviable business models [12]. According to C. Dahlheim, Board Member at Volkswagen Financial Services, no car sharing company has been able to generate a sustainable and profitable business model for car sharing up to now. Hence, new service design concepts are required to create viable car sharing models. Here, remote driving may prove to be the better service because the first mile from the car sharing parking place to the car sharing client, as well as the last mile from the final destination of the shared car journey or trip to the still unknown parking place after use, can be realized by the remote driver.
However, this service enrichment of remote driving represents just one competitive advantage. Other benefits of remote driving include fewer accidents and car crashes due to safety-certified remote drivers, no potential for drug and alcohol abuse whilst driving, as well as no potential for violence or threats to drivers. This aspect is of special interest in tele-taxi operations where the full journey from start to final destination is realized by the remote driver, so the door-to-door service represents a full tele-taxi service [13]. Finally, remote driving has also already found its way into the public transportation arena. For instance, remote driving services in Hamburg extend the existing metro and bus system by linking remote regions of the city through on-demand tele-taxing via remote drivers to the end point of the metro network, thus enhancing security and convenience for public transportation customers and clients [14].
A review of the literature reveals a large variety of academic articles on the last mile problem in the context of retailing and e-commerce, with a focus on transport impacts and delivery points as well as on efficient vehicle routing algorithm [15] research, which in part has also been implemented and put into practice, as for example by ERTICO’s “Connected, Cooperated & Automated Mobility” initiative (CCAD), which not only seeks to “foster interoperable, reliable and compliant connectivity for automation” but also conducts impact assessments of automated vehicle functions through large-scale pilots [16]. More recent research investigates self-driving transport robots and their related regulatory framework [1]. The sustainable service view of car-based transportation has been dominated in recent years by studies into different business models for car sharing with an emphasis on urban transportation [17]. The issue of remote driving as an enhanced car-based mobility service and its related regulatory framework have not been discussed until now and hence represent a research gap [18]. Hence, this research concentrates on remote driving, its economic impact, and the related regulatory framework.
Following the introduction (Section 1) and after elucidating the theoretical and methodological background of the study (Section 2), the paper highlights the current status of automated driving in both legal and technological terms (Section 3). The subsequent case study focusing on Vay Technologies (Section 4) showcases remote driving in the form of tele-taxiing and service enrichment of car sharing and public transport, before an analytical part (Section 5) investigates different options for successful business models of tele-driving as well as the specific aspects that a related regulatory framework for use of remote driving should take into account. The discussive part (Section 6) analyses the current legal situation for tele-driving and highlights gaps in existing legislation before proposals for an improved regulatory framework for tele-driving are made in the conclusion (Section 7).
2. Theoretical Background and Methods
With the growth of new technologies, services are becoming more complex and integrating a greater number of actors, artefacts, stakeholders, and underlying processes. Service Design (SD) helps make a service system and process understandable and manageable by organizing and planning business resources in order to improve an existing service or create a new one, taking the needs and experiences of both employees and consumers into consideration. Service design started gaining increased attention after an important turning point from product design to process design was outlined in the development of design domain, brought about by the introduction of Service-Dominant Logic at the start of the 2000’s [19]. This change was spurred on by the shift in focus from the significance of physical goods, i.e., goods-dominant logic, towards services, i.e., service-dominant logic. This development was continued by the concept of servification, i.e., the increased role of services for the manufacturing sector and its sustainable continuation by replacing goods with services, in order to save natural resources and to drive shared economy concepts [20].
Logistics, as an important service sector, has for a long time ignored service design concepts and focused more on cost and time aspects. The literature review reveals a large number of scientific papers dealing with logistics costing, timeliness, and the last mile problem, but service design aspects for logistics services have seldom been discussed from the client perspective. Even the most well-known papers in the field of car sharing to a great extent highlight cost and ecological aspects, time and safety topics, as well as queuing issues, but service design is seldom examined, as the paper by Bellos et al. [21] highlights exemplarily, where time “design” only appears in the technical interpretation of product design describing technical and economic features of a car sharing model.
The advent of remote driving concepts indicated the missing service design dimension in the context of car sharing. The success of start-ups such as Vay Technologies is based on the fact that the last-mile problem represents a bottleneck on the path to a viable business model for car sharing, and the solution required to overcome this obstacle is the service design solution where shared cars come to the client and remove responsibility from the client to find a parking space after the journey. In this sense, remote driving offers a service design concept for car sharing and interconnects the car sharing sector with the public transportation sphere, where service design concepts are based on developments experienced. Additional benefits of tele-driving, i.e., reduced cost bases and higher safety levels, are fringe benefits, linked as a complement to the remote vehicle operation concept.
However, the proximity of remote driving, public transport, and traffic on public roads reveals shortcomings in the regulatory framework for the use of remote driving concepts, despite the relative maturity of the underlying technology compared with self-driving vehicles. Related regulatory questions that a logistics service provider must consider extend from data protection to liability for torts performed to such mundane fields as traffic law. This paper analyses and further develops the regulatory framework of tele-driving and tele-taxiing by highlighting their legal implications. Finally, the paper discusses future perspectives and proposes specific modes of compliance.
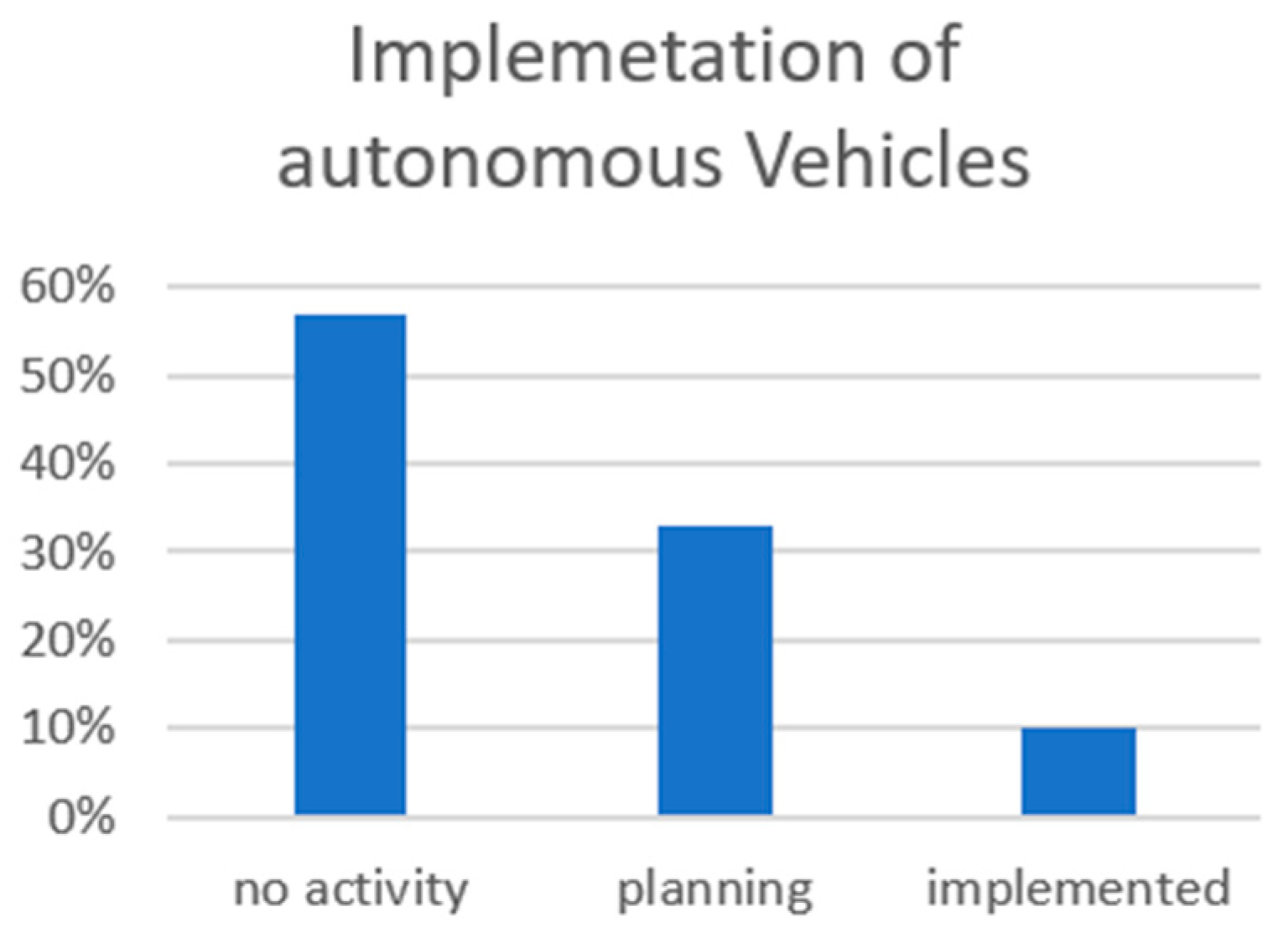
The research uses secondary data analysis, expert interviews, an online survey, and research group meetings, as well as the results of case studies from start-ups in Estonia and Germany in the field of autonomous transport robots and remote driving. Research on legal issues in the regulatory framework of tele-driving and remotely operated vehicles also comprises case studies of legal systems from different countries that are presented and discussed in brief. Expert interviews were collated between October and December 2022 and comprised six expert interviews from the field of autonomous driving in Estonia and Germany. Expert interviews were executed in face-to-face sessions on the basis of semi-structured questionnaires by following the corresponding literature. The online survey was part of the EU project “Connect2SmallPorts” implemented between 2020 and 2022 in the Baltic Sea Region, and analysed digitalization and automatization of maritime logistics hubs. Results of the survey and expert interviews showed that the automatization of logistics processes concerning vehicles is only partly realized but is of great interest in logistics hubs. Only about 10% of the respondents had already implemented autonomous vehicles, but 33% are planning to install this mode of transport. The main argument against using self-driving vehicles was linked to safety and security problems. The following Figure 1 gives an overview of the degree of the implementation of autonomous vehicles in Baltic Ports, together with the mentioned reasons for hesitation about implementation activities:
In some cases, remote-controlled vehicles were named as a possible alternative. This picture was also confirmed by experts in the private sector, where the main obstacles to using self-driving vehicles were linked to security concerns. This was especially true for taxi companies. The underlying semi-structured interviews investigate economic, legal, and security aspects in the thematic field of use of autonomous vehicles, with a focus on taxis and additional services around the car sharing sector.
The empirical measures represent a classical multi-method approach that brought together qualitative data, which was then analysed and interpreted using methodological triangulation approaches. By following Altrichter et al. [22] and using more than one empirical method to gather data, including expert interviews, surveys, case studies, and secondary research data, we acquire a more detailed and better-balanced picture of the research situation. Finally, the empirical results of the research are discussed in the context of existing literature.
3. Automated Vehicles in Technological and Legal Terms
Depending on the level of autonomy, automated vehicles require human interaction to cope with increasingly rare, but nevertheless still occurring traffic dilemmas that the respective algorithms have not yet been sufficiently trained to cope with, and even if trained appropriately, automated technology fails from time to time, due to either software defects or hardware malfunctions. The most economically efficient and practicable way of providing this human “backup” are forms of remote operation, i.e., set-ups where the human driver is not physically located inside the vehicle but communicates with the vehicle’s steering mechanism via telecommunication means or equipment, or especially in remote driving cases, via Wi-Fi. If this human remote-control function is not enabled at least once, an otherwise stationary and immobile vehicle cannot proceed automatically (remote assistance) but forms a constantly enabled part of the operation architecture; remote operation is specified as “remote driving” [18] or, more commonly, as tele-driving. This paper refers to both forms of remote operation.
3.1. Automated Vehicles
Some motor vehicle functions have been highly automated for decades: Many of the existing safety and driver assistance systems, such as ABS (anti-lock braking system), ESP (electronic stability program), lane-keeping assist, or adaptive cruise control (ACC), are valuable tools that have not only made driving more comfortable but also significantly reduced the number of road traffic fatalities worldwide. They ensure driving stability in critical situations and can automatically maintain the distance from the vehicle in front.
This technological progress is also already reflected in established standards. More specifically, both the International Organisation for Standardisation (ISO) and the Society of Automotive Engineers (SAE) have developed six levels of standards for autonomous driving, ranging from ‘no autonomous driving’ (Level 0) to ‘full automation’ (Level 5) [23].
The term “self-driving vehicles” usually refers to ISO/SAE Level 4 or 5, where the automated driving system (ADS) performs the entire dynamic driving task at any time and in any aspect (in the case of ISO/SAE Level 4, in all aspects) without any user intervention. In addition to the continuous improvement of sensors and data processing in vehicle controls, such automation is also achieved by means of an off-vehicle network (i.e., a car-to-car network connecting vehicles travelling in traffic). The car-to-infrastructure network connects external facilities (such as traffic lights, traffic management systems, and monitoring systems) for data exchange. Together, they significantly improve the flow of traffic, as networked vehicles can move much more smoothly when automated than when driven by individuals who often have widely differing attention spans, driving styles, local knowledge, and driving skills. These synergies are also good for the environment, as smooth traffic also makes considerable fuel savings compared with braking frequently.
In addition, gradually more and more integrated driving assistance systems in the future will also be able to analyse driver behaviour, build up a driving profile, and adapt the driving behaviour of the fully automated vehicle to his or her intentions. Analysing traffic patterns will make it possible to predict the behaviour of others using roads, which is particularly important to protect pedestrians [24].
3.2. Regulation of Automated Vehicles—Global Overview
Because of these many advantages, fully automated vehicles are also politically desirable, and legal barriers are increasingly being removed. For example, the 1968 Vienna Convention on Road Traffic [25] has so far not covered autonomous vehicles, requiring the presence of a human driver capable of taking control. This issue has, however, been addressed by a recent amendment to the Vienna Convention developed by the UNECE World Forum for Harmonization of Vehicle Regulations. This consisted of adding new Article 34bis [26], according to which the driver requirement is deemed “fulfilled” if the vehicle uses an automated driving system (ADS), which complies with national technical regulations.
In terms of technical regulations for international vehicles, three new UN regulations in the field of connected and automated driving came into force in spring 2022:
The UNECE World Forum for Harmonization of Vehicle Regulations and its Working Party on Automated/Autonomous and Connected Vehicles (GRVA) [30] are also working to further harmonise international technical requirements.
Similar changes are being enacted in European legislation. In December 2021, the European Commission presented a draft EU ‘automated driving system’ (ADS Regulation) [31,32] to all 27 Member States. The draft regulation sets out, among other things, rules for the type-approval of autonomous vehicles with regard to their automated driving systems. The EU ADS Regulation complements Regulation 2019/2144 on type-approval of motor vehicles, which is also fairly new and will enter into force on 1 July 2022, and which already defines ‘fully automated vehicles’ in Article 3(22), but up to now does not regulate them or their use in great detail. The ADS Regulation therefore establishes the EU’s first regulatory framework for automated and fully automated vehicles.
Among EU Member States, Germany, for example, has adopted a new law on autonomous driving that entered into force on 28 July 2021 and amended the German Road Traffic Act [33]. In Germany, legislation introduced in 2017 [34] previously only permitted driving cars steered by humans up to ISO/SAE Level 3, i.e., the driver always remained in control of the vehicle even when highly or fully automated driving functions were used. The driver needed to be ready to take over the driving at any time if this was deemed necessary or if prompted to do so by the system. Germany’s new law on autonomous driving no longer requires a driver to be present and therefore allows “autonomous driving functions” up to ISO/SAE Level 4 to be used in specified locations (e.g., on roads, i.e., the public highway) for normal operation.
The Japanese government has also moved a step closer to allowing fully autonomous driving by passing a bill to make driverless cars legal. Assuming the bill enters into force this year, it will facilitate plans to provide unmanned, self-driving vehicles to transport elderly people in sparsely populated rural areas. However, companies providing driverless vehicles will be expected to monitor the use of their vehicles remotely, from a distance. In the event of a problem or, in the worst case, an accident, they must send staff to deal with the aftermath and outcome [35].
In Israel, a regulation was adopted in March 2022 permitting companies to test autonomous public transport, or driverless taxis, on Israeli roads. A bill proposed by the Ministry of Transport and Road Safety has already been passed in the Knesset and regulates issues such as insurance and the various permits required. It also establishes supervisory bodies and an advisory committee comprising representatives from relevant stakeholders [36].
The U.S. has also been very active in regulating this issue. For example, in early March 2022, the U.S. National Highway Traffic Safety Administration (NHTSA) issued rules that will remove the need for manufacturers of automated vehicles to equip fully autonomous vehicles with manual control devices in order to meet crash avoidance standards. This move was in response to a petition submitted to NHTSA in February 2022 by General Motors and its self-driving technology unit, Cruise, requesting permission to build and introduce a self-driving vehicle without any human controls such as a steering wheel or brake pedals [37]. Anyway, we must consider the U.S. being regarded as a world leader in supporting autonomous vehicles, less so because of its pioneering regulatory approach, but rather because most manufacturers of self-driving vehicles are headquartered there and most patents for this field have been filed in the U.S.A. [38].
4. Case Study: Vay Technology
Vay Technology Ltd. [5] is a start-up founded by Thomas von der Ohe, Fabrizio Scelsi, and Bogdan Djukic in Berlin in September 2018 with the business idea of delivering remotely driven cars to our streets and roads. Vay’s founders gained experience working at companies based in Silicon Valley including Tesla, Google, Zoox, Amazon and Uber as well as for German car manufacturers. The company has offices in Berlin, Germany, and Portland, Oregon/U.S.A. Unlike the approaches of Tesla and others, Vay does not focus on self-driving autonomous vehicles but on remote operation, i.e., each car is operated by a tele-driver located in a stationary remote-control centre. The connection to the car as well as data exchange are realized via Wi-Fi. In order to be able to steer the car, the remote-driver has his steering wheel in the middle of a control panel which is equipped with several screens displaying pictures and images from 360-degree cameras that are installed on the remote car, together with a set of other car monitoring and control devices, including speed monitors (and regulators) as well as other sensor data from car-mounted radar devices and microphones in order to follow acoustic communication inputs from the car’s interior and the car’s immediate surroundings.
Thomas von der Ohe, one of Vay’s CEOs, emphasises that remote driving will bridge the gap in time until autonomous robocar technology is mature enough to be applied for general use: “we are pursuing a different approach to autonomous driving, which we call a tele-drive first approach, and this allows us to launch something much, much earlier”, and he adds that “it is much cheaper than ride-hailing mainly because you drive in the middle and we don’t have to pay someone so we can really bring down the cost to close to urban car ownership.” Ohe continues to highlight that tele-driving could help bridge part of this gap, even if his American rivals have a head start in terms of technology and funding. “We can add autonomous features gradually … if we are for instance travelling in a straight line on a highway for 30 km, we can do that autonomously and then the tele-driver comes back for these more difficult manoeuvres, for the intersections and the other parts.” [39].
Vay’s current business model targets the space between car-sharing and self-driving robotaxis by offering the client additional services compared with car sharing, such as direct-to-door services as well as the service of disposing of the car after use without finding a parking space or a car park. Consequently, Vay plans to deliver its remotely driven cars to the streets of Hamburg and Berlin, Germany, for two years of testing, with a number of certified tele-drivers ensuring a high safety level of driving. The service Vay provides will be able to undercut ride-hailing apps such as Uber by relying on customers to do the bulk of the driving, while a small pool of remote drivers could pilot the electric cars to a parking spot, or on to the next job or order.
One of the most challenging technical challenges of remote operation appears in the case where the connection between the remote driver in the control centre and the car is interrupted, which can even be caused by interference or distortion of the internet link. In this case, the car must automatically take control of the vehicle and start self-driving algorithms in the context of busy city centres and crowded streets. Despite these crucial challenges, first Berlin and then the City of Hamburg agreed to start testing the operation of remote-controlled cars with Vay in order to gain experience for the changes and amendments required to the regular framework for remote operation as well as for receiving high-quality remote operational data, enabling improvements to algorithms for safe driving in urban environments and settings. The City of Hamburg government considers Vay’s remote-driving services also to be an extension of the existing public transportation system by linking remote areas and suburbs to the existing public transport network and offering Vay’s services on demand [40].
Important motivations for the public to support Vay’s approach in Berlin and Hamburg are its beneficial ecological impacts, as car-sharing systems have the potential to reduce the number of private cars significantly, bearing in mind that private vehicles are typically parked (at rest–and not in use) for 90–95% of the time. However, current car-sharing companies are not economically viable yet, so new additional services such as offering door-to-door transportation services are necessary to make the car-sharing sector more attractive. Another main topic concerns enhancement of traffic safety in urban areas because conventional driving is responsible for the top four causes of fatal accidents in urban environments, namely speeding, intoxication, distraction, and fatigue. These sources of accidents can be significantly reduced or eliminated by using qualified tele-drivers who are equipped with additional technology, such as 360° degree blind-spot free vision.
For Vay’s clients and customers, the journey starts with an app that orders the remote car (similar to other taxi apps); the ordered car arrives shortly thereafter and transports the client to the specified, instructed destination. On arrival at the destination, the client leaves the car without needing to search for a parking space or car park. The remote operation is charged to a credit card. According to Vay, this service can be realized with up to 60% lower costs compared with an Uber ride in urban areas, i.e., the business model seems to be highly competitive compared with all other mobility services available for individuals. Vay’s management is convinced that remote operation technology can be applied to many other sectors, including ride sharing and all kinds of delivery services, but also for buses and trucks.
The technical weak point of remote operation is linked to bandwidth and the availability and stability of internet connections because enormous volumes of data are transferred between control centres and vehicles, and only highly developed and urban areas are at present equipped with sufficiently powerful internet technology. Furthermore, the risk of distortion to or interruption of internet links means there will be a requirement to prepare technical redundancies throughout the technical solutions, including simultaneous use of multiple cellular networks. Moreover, the need for “technical supervision” regulated in Section 14 of the German Autonomous Driving Regulation [9] also affects manufacturers such as Vay: While the vehicle’s owner is generally responsible for ensuring that a suitable natural person is available for technical supervision (Section 13 para. 6, clause 1 Autonomous Driving Regulation), the manufacturer is obliged to offer respective appropriate training. Depending on which components and parts of a vehicle are affected, we may assume that the manufacturer will also pass on these obligations, or at least the associated costs, down the supply chain.
In any case, there is a realistic chance that these remote operation approaches will bring the technological initiative in robo-transport back to Europe, at least for the transition period until general autonomous driving technology has matured.
5. Analysis and results
In the context of remote driving, legal questions arise in terms of required references as to who is legally considered to be a driver and where he or she must legally be situated (Section 5.1), to issues of data protection, which in this paper is exemplified via an analysis of compliance with the EU General Data Protection Regulation (GDPR) (Section 5.2), as well as who may be held liable for possible accidents and malfunctions on both tortious and contractual levels (Section 5.3).
5.1. Who Is the Driver and Where Is He/She Located?
A remote operator faces different aspects of hazard perception and task complexity than a driver located inside the vehicle [41]. It is therefore controversial whether (and to what extent) a remote driver should be considered an “operator”, a “driver” or “person in control”, in the same way as a human driver located inside the vehicle.
In Estonia, there is still no legal regulation for automated driving at SAE Levels 4 to 5. However, we may assume that the more vehicles are driven in automated mode, the more responsibility will ultimately rest with the producer rather than with the individual person (operator) or owner, similar to the almost identical German legal set-up in this respect [42]. It should be noted here that under Estonian law, the “operator” is a person or robot (e.g., sitting in the driver’s seat), i.e., he is no longer a driver who has actual control, but operates the autonomous technology of the self-driving (learning?) vehicle. Estonia’s self-driving vehicles as such have been admitted for use in public, e.g., in everyday traffic, on streets, and roads since 2017 [43], provided that there is a human driver who can take control of the vehicle if necessary (corresponding to ISO/SAE Level 3) [44,45].
On the issue of the location of the driver, the U.S. has imposed criteria in some state statutes [18]. While no U.S. state law expressly requires the physical presence of a driver in a motor vehicle, other duties imposed on the driver, as in the context of “unattended” and “abandoned vehicles”, in the case of a crash, in terms of the use of seat belts, referring to the “driver’s sight”, his or her “interference” and “control” [46] presuppose the driver’s presence in or at least in the immediate vicinity of the vehicle criteria, which for the sake of legal certainty, any remote driving regulation initiative should explicitly overrule. In terms of remote driving and the remote operator as such, Trimble et al. [47] have, based on their study of 15 U.S. state laws and the Uniform Vehicle Code, deduced a general definition of an operator as being any “person” (i.e., a “natural person, firm, partnership, association, or corporation” or not defined at all) who holds a valid driving license anyway, still leaving open whether the term “operate” or “driving” would require physical presence within the vehicle. Intending to remove this ambiguity, they propose a broader definition of this issue, specifically: “humans can engage and disengage the vehicle (including remotely) but do not need to physically be present or seated at the controls of the vehicle” [47], a proposal that also considers that passengers being transported within a remotely driven vehicle while sitting in the driver’s seat must not be considered drivers.
California’s autonomous vehicle testing regulations define a “remote operator” as “a natural person who: possesses the proper class of license for the type of test vehicle being operated, is not seated in the driver’s seat of the vehicle; engages and monitors the autonomous vehicle, and is able to communicate with occupants in the vehicle through a communication link”. A remote operator may also have the ability to perform the dynamic driving task for the vehicle or cause the vehicle to achieve a minimal risk condition [48].
Furthermore, the model regulation published recently by the U.S. Uniform Law Commission stipulates that automated vehicles applying remote driving technology must generally be assigned an automated-driving provider who is responsible for not violating any road traffic rules or laws [49]. The requirement to register as an automated-driving provider permits technically competent entities, such as companies involved in the development and operation of automated vehicles, to operate vehicles. The automated-driving provider does not need to be the same person or entity as the vehicle’s owner, and furthermore, it may operate the vehicle (in automated mode) without a driver’s license. Finally, the model legislation stipulates, that passengers in the driver’s seat during a completely automated journey are not required to own a driver’s license. If this model legislation is adopted by states, it will allow automated vehicles to have legal, non-human drivers responsible for adhering to the rules of the road.
From a legal perspective, it could also be essential to ascertain whether the remote driver is located in a command centre in the territory of the respective jurisdiction, or abroad. While this criterion can also be significant for liability (see below), from a regulative perspective, determination is in tandem with the recognition of foreign driving licenses, i.e., once (and to the degree) a foreign driving license must be recognized by a domestic legal system, generally remote driving from a command centre located in that respective jurisdiction can also be assumed to be permitted [47]. Furthermore, in the—in many respects—exemplary California AV testing regulations (Goodall, [18]), the remote driver does not need to be situated on U.S. soil, i.e., in America (or even in California) [48,49].
5.2. Remote Operation and Data Protection
Remotely operated vehicles are equipped with multiple sensors and tracking in the form of cameras, GPS-based devices, and inertial measurement units (IMU) for special orientation. Connection to the command centre is maintained via Wi-Fi and telecommunication networks. Remote operation of vehicles thus implies a continual and permanent exchange of data, including live video transfer, between the vehicle and the control centre via public telecommunication networks.
On 25 May 2018, the EU General Data Protection Regulation [50] entered into force, replacing the Data Protection Directive of 1995 [51]. The GDPR aims to strengthen and unify data protection for all individuals within the European Union, and in particular addresses exporting personal data to countries outside the EU. One important highlight of the GDPR is its attempts to “return control” to citizens and residents over their personal data and to harmonize the regulatory framework for international business, by unifying the regulation within the EU. As an EU regulation, the GDPR applies directly in all EU Member States, i.e., it does not need national governments to pass any enabling legislation. Non-compliance with the strict data protection rules can lead to severe penalties of up to 4% of a company’s global turnover [50].
Applying GDPR to remotely driven vehicles, a first controversial issue arises in terms of personal data collected and transmitted during operation. Certain personal data from the customer or client is required to execute the contract, e.g., the location of the client a car or taxicab must be delivered to, by means of remote operation. The corresponding personal data includes the address, financial data, and, in addition, personal consumer data resulting from the business relationship with the client. The novel and critical impact of GDPR concerns the data which is needed and collected to operate the vehicle remotely from its present location to the final destination. This data is collected in public spaces and comprises photos, videos, and other orientation data linked to specific individuals and persons. This data is exchanged over the internet and via telecommunication networks, before it is considered and analysed, in part by control personnel and their IT systems. Later, the data is stored in databases for the respective companies. In this way, an organization or company collects data from EU residents (from the “data subject”) itself (as a “data controller”) or on behalf of a data controller (as a “processor”), e.g., a cloud service provider, and GDPR applies to these processes irrespective of whether the organization is located inside or outside the EU.
GDPR defines ‘personal data’ as any information relating to an identified or identifiable natural person (‘data subject’). An identifiable natural person is any person who can be identified, directly or indirectly, in particular by reference to an identifier such as a name, an identification number, location data, an online identifier, or to one or more factors specific to the physical, physiological, genetic, mental, economic, cultural, or social identity of that natural person. In addition to this, a catalogue of examples of “personal data” provides examples of information relating to an individual, whether it relates to his or her private, professional, or public life, e.g., name, home address, photographs, e-mail address, bank details, posts on social networking websites, medical information, or a computer’s IP address [50]. The protection needs of personal data are thus clearly defined. In the case of remotely operated vehicles, photos taken and video sequences of natural persons in particular are “personal data”, according to these definitions in the GDPR.
Once data falls within the scope of application of the GDPR, the Regulation provides strict instructions on how this data may be used. As the remotely operated vehicle as a device collects, processes, and transfers user data “by design” itself, the producer of the vehicle must ensure that data protection measures have been put in place, e.g., pseudonymization of personal data by the controller at an early stage of data collection, and since communication between the robot and remote-control centre is executed via wireless links, personal data (including photos and video sequences) must be encrypted. Secondly, the data collected by the robot must be limited to what is necessary and required. Thirdly, all user data obtained must be accessible and portable in order to enable any EU resident, assuming that his/her personal data were collected by the autonomous vehicle (i.e., photos and videos), to be afforded the opportunity to request these data in a widely compatible format, enabling him or her to verify exactly what data has been obtained.
As the “internet of things” will lead to multiple situations where the location of data collection does not match the location of data processing and storage, we must stress that the rules of GDPR for EU residents’ private data apply regardless of whether processing takes place in the EU or not. Since in most cases personal data is not stored permanently in the vehicle, the otherwise practically significant requirement that returned devices must be wiped and personal data on them must be erased is of lesser importance here.
The environment organizing control of the remotely operated vehicle must be able to demonstrate compliance with GDPR, i.e., the data controller should implement measures that meet the principles of data protection by design and data protection by default. Furthermore, the data controller is responsible for implementing effective measures and must be able to demonstrate compliance of processing activities, even if processing is carried out by a data processor on behalf of the controller. Article 25 GDPR states that Data Protection Impact Assessments must be conducted when specific risks relate to the rights and freedoms of data subjects, and Articles 37–39 state that Data Protection Officers must ensure compliance within organizations. Strict penalties apply in cases of non-compliance with these three main rules, starting at € 20 million and extending to as much as 4% of a company’s global turnover.
5.3. Liability
General tort law in most legal systems provides for general claims for damages brought about by any tortious action, and based on these principles, they are implemented into positive law in all national legal systems individually, and the remote driver (or respective legal entity on whose behalf the driver is operating) steering the autonomous vehicle would be held liable for any tortious action as the legal/natural person committing the vehicle. Traffic law, anyway, in most legal systems specifies (i.e., in most cases extends) this liability according to the special circumstances of traffic on public roads.
In general, tortious liability in many legal systems is fault-based (see e.g., Section 823 I BGB, i.e., the German Civil Code) or subject to exculpation if the tort was not committed directly by the tort-feasor, but by a third party whom the tort-feasor is responsible for and who was selected and supervised with due care (see Section 831 BGB). In our case study, this could be any remote driver employed by the respective company.
In a nutshell, under German law, use of a remotely operated vehicle does not affect protection under tort law [52]. Under Estonian law, for instance, claims of the injured party are covered by the strict liability of the owner (Section 1057 Estonian Law of Obligations Act) and the manufacturer (Section 1061 Estonian Law of Obligations Act) of the motor vehicle and by a direct claim against the insurer of the motor vehicle (Section 23 Estonian Law of Obligations Act), irrespective of whether the driver is situated in the car himself/herself or is steering the vehicle remotely.
Once the victim has been successfully compensated (for example, by the holder or the insurance company), the question usually arises as to whether, from whom, and to what extent the holder or the insurance company has a claim for compensation against a third party—for example, the insurance company against the driver (Section 53 Estonian Traffic Insurance Act) or the holder against the manufacturer. Unless liability in a particular case is excluded (often under the standard terms and conditions of a contract) between the seller and buyer, the seller is also liable to the buyer for defects in the product.
The manufacturer’s liability towards the owner does not pose any major challenges for remotely operated vehicles, as Section 1061 et seq. of the Estonian Law of Obligations Act in principle also covers defects, design, and marketing faults of remote operation components of vehicles. A human driver being located abroad may complicate legal protection, as under private international law the driver may be liable under the legal system of the country where he/she is located; the general principle in private international law in tort law, as exemplified in Art. 4 I Regulation (EC) No 864/2007 on the law applicable to non-contractual obligations (“Rome II” Regulation) [53], is that the law of that country applies where the damage occurs, i.e., irrespective of the driver’s location.
Similar to Level 3, at present applicable law would also provide for full compensation for an injured party for damages caused in a road traffic accident caused by a remotely driven vehicle at Level 4 or 5: the base of damages claims against the holder under Section 1057 Estonian Law of Obligations Act, against the manufacturer under Section 1061 Estonian Law of Obligations Act, and against the insurer under Section 23 Estonian Law of Obligations Act would continue to apply. If, after compensation has been paid to the victim or injured party, it is established that whosoever bears the ultimate costs of the accident in a particular case, there is a risk that the victim (who may also be a passenger inside the vehicle) will blame the accident on the remote driver and/or the system which automatically forwarded control to the remote driver at that time, even though the accident was in fact caused either by a victim beyond the car or the passive passenger within the vehicle for example, if the passenger did not follow clear instructions or actively took over at the time of the accident. In order to prevent this situation from occurring, it is advisable (and could even be considered mandatory) to install a ‘black box’ system based on a satellite navigation system for any remotely driven vehicles, which keeps records when the remote driving mode is activated and operational.
There is no need for major changes to the present concepts of insurance systems, but responsible parties (other than holders, which are already insured) such as manufacturers and vendors could be allowed to take out additional insurance that takes AI into account as a major source of risk, which could be developed as a standard by the state. One option would also be a national insurance fund or similar to motor insurance an obligation for all persons responsible for AI to insure their product as high risk.
6. Discussion
Public transportation is considered as the future and way ahead for urban motion, i.e., urban car use only has a perspective in forms of extensions of public transportation services, taxiing or in a car sharing context. Here, tele-driving may be the technical solution as long as automatic transport robots are not mature enough to be used safely for travelling in traffic on public roads. Tele-driving is less expensive than human driving; it increases the attractivity of car sharing models with its additional client-oriented services such as door-to-door delivery that are able to replace classic taxi services, as well as extending public transportation services, and it contributes to sustainability by reducing pollution and energy wastage by omitting redundant searches for a parking place. Additionally, the tele-driver is not physically linked to one vehicle because he/she can jump virtually from one car to another, so efficiencies for staffing and personnel costs for transport increase significantly.
From a legal perspective, unambiguous definitions of the terms “operator”, diver” as well as “remote operation” are of central importance. As general principles of private law establish strict liability for road traffic accidents for the owner of the vehicle, the owner is, in principle, liable for his/her vehicle even if the vehicle was operated remotely, i.e., if he/she transferred actual control to a third person. This is especially significant in remote operation set-ups since it is usually easiest for the plaintiff to bring a claim against the owner, as the owner in cases of accidents is much easier to determine (via public registration) than the actual driver and as the owner’s liability will not depend on fault.
Many existing legal frameworks do not yet cover Level 4 and Level 5 automated driving, and even though a few legal systems, such as e.g., Germany’s, have recently started to regulate this field, there is a general lack of the necessary legal concepts and definitions. Before defining remote driving as such, the first step required could be to define self-driving vehicles, specifically according to the six Levels of ISO/SAE international standards. Since the issues of liability for self-driving vehicles and remote driving (e.g., the redefinition of the former driver as an ‘operator’ as well as the concept of product liability, similar to facilitating recording evidence by making a black box standard in remotely driven vehicles) not only concern autonomous vehicles and remote driving but equally the use of other robots, it would be useful to introduce a new general rule on sources of high risk for the civil liability regime, which could be similar, for example, to the liability of any other parties exposing people to a high risk. For Estonia, such a proposal was recently also made by Turk and Pild in their “Analysis for the introduction of SAE Level 4 and 5 vehicles” [54].
Besides, such a general standard should be in line with the European Commission’s April 2021 draft legislation on artificial intelligence (AI) [55], dividing the risks associated with AI into four categories, namely: (1) unacceptable, (2) high, (3) low, and (4) minimal risks, and imposing corresponding obligations and possible sanctions on the AI system. Turk and Pild’s analysis furthermore suggests that limits to producer responsibility should be defined for robot activities, as existing producer responsibility cannot be applied to AI. Overall, no major legislative effort must be ready to regulate remote operation of Level 4–5 vehicles, but both drivers and manufacturers, as well as authorities, must be provided with legal certainty regarding the classification of the terms “driver”, operator”, and “remote driving”.
Finally, GDPR formulates new challenges for the development and use of remote operation of vehicles, since a huge set of data required to enable remote operation of vehicles must be considered personal data, which is not only processed locally in the vehicle but is also transferred and stored to and from command centres via internet links.
However, the GDPR only partially covers the use of data in the overall data exchange sphere. The German federal government is therefore at present planning to introduce a Mobility Data Act, making vehicle data usable for a variety of private and public actors by means of a trust model [56]. In a German context, the draft Data Act published on 23 February 2022, which intends to enable users of connected products (including vehicles) to provide access to the data to generate and share it with third parties, follows a similar objective as a draft that takes compliance with GDPR in terms of personal data protection as well as the protection of trade and business secrets into account. From a technological perspective, the report published in July 2022 by the U.K. government’s Centre for Connected and Autonomous Vehicles [57] provides detailed model standards for remote operation of vehicles.
On an EU level, the European Commission’s draft of an AI Regulation published on 21 April 2021 [55] indicates a further regulatory building block. The future AI Regulation will be the world’s first binding cross-sectoral framework for the development, use, and distribution of AI systems. According to this draft, AI systems used in road traffic are subject to extensive requirements, for example, with regard to the resilience of the system in the event of malfunctions or cyber-attacks or the quality of training, validation, and test data sets used criteria applying in full to any use for remote operation of vehicles as well.
7. Conclusions
Startups developing remote operation solutions in Estonia and Germany showcase the fact that the last mile problem also exists in the area of car-sharing, and new business models based on remote operation attempt to overcome this obstacle. First prototypes for urban remote operation are being tested in Berlin, Hamburg, and Tallinn and attempt to tackle not only the last mile problem but also to create and offer new services for urban mobility. A leading role is played by start-up companies such as Elmo and VAY, which elaborate new mobility offers based on remote operation in connection with car-sharing and taxi services, which are designed to fill the gap arising during the present transition from human driving to fully automated vehicles.
At present, self-driving vehicles are still in the development phase, so large-scale operations in public transportation are not feasible at the moment. Otherwise, the logistics sector suffers under cost pressures and lacks service innovations in order to realize sustainable business models and cope with the requirements of shared economies.
Tele-driving seems to be a promising solution for the transition period from human-controlled transport devices to autonomous self-driving transport robots. The tele-driving technology is mature, and the first real-life tests are already being run in Berlin and Hamburg. The applications of tele-driving are manifold and cover several business models, including last-mile services for car sharing, tele-taxiing and door-to-door commuter services for public transportation systems. Beyond applications for tele-driving in personal transportation, applications for cargo and freight-forwarding are also promising and appear to be economically viable.
However, operating remote operated vehicles is linked to a large number of legal and regulatory questions and impacts data protection and privacy, liability, and traffic laws. The regulatory framework required for remotely operated vehicles currently represents a patchwork and requires a standardized and systematic discussion in order to formulate general rules of operation—especially by defining self-driving vehicles according to the six levels of ISO/SAE international standards in their respective national legal systems. While the definition proposed by Trimble et al. [47] for a U.S. context may be considered a general model for other legislation as well, EU member state legislators should be careful to keep their respective legal reforms in line with the draft EU AI Act.
This paper intends to shed some light on two aspects where major challenges will arise in future (and in part even do so today), being strict liability for accidents caused by remote operation under traffic law and considerable penalties in case of violating GDPR requirements for tele-driving data collection and transmission mechanisms—risks an entrepreneur deciding in favour of making use of tele-driving may have not taken into account so far. Besides legal aspects, the economic viability of new business models is also discussed.
The research gives an empirically validated insight into current developments in the sector of remotely operated vehicles and takes the highly dynamic and innovative character of the whole sector into account, but the picture can only give a snapshot of the evolution of tele-driving. A comprehensive and unambiguous regulatory framework would essentially underpin the creation of competitive advantages for business models operating in the respective legal system based on tele-driving concepts and, in addition, would contribute to realising sustainable and shared economic models.
Author Contributions
Conceptualization, Investigation, Methodology, Validation, Writing—original draft, T.H. and G.P. The authors contributed equally. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
The research data have been collected in the frame of the EU project “Connect2SmallPorts”.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Hoffmann, T.; Prause, G. On the Regulatory Framework for Last-Mile Delivery Robots. Machines 2018, 6, 33. [Google Scholar] [CrossRef] [Green Version]
- Gerasimova, V.; Philipp, R.; Prause, G. Service Design for Trans-National Smart Supply Chains. Springer Lect. Notes Syst. Netw. 2021, 195, 377–388. [Google Scholar] [CrossRef]
- Prokopenko, O.; Järvis, M.; Prause, G.; Kara, I.; Kyrychenko, H.; Kochubei, O.; Prokopenko, M. Economic Features of the Use of Electric Vehicles in Delivery Services in Estonia. Int. J. Energy Econ. Policy 2022, 12, 340–349. [Google Scholar] [CrossRef]
- Sawers, P. Ottopia’s Remote Assistance Platform for Autonomous Cars Combines Humans with AI. Venture Beat 2018. Available online: https://venturebeat.com/2018/12/21/ottopias-remote-assistance-platform-for-autonomous-cars-combines-humans-with-ai/ (accessed on 21 December 2022).
- Vay. A New Approach to Driverless Mobility. 2022. Available online: www.vay.io (accessed on 21 December 2022).
- Fernride. Autonomous, Electric Yard-Trucking. 2022. Available online: www.fernride.com (accessed on 21 December 2022).
- Estonian Broadcasting Cooperation ERR. 25 November 2022. Elmo Plans World’s First Remote-Guided Car Rental Service. Available online: https://news.err.ee/1608800197/elmo-plans-world-s-first-remote-guided-car-rental-service (accessed on 21 December 2022).
- Gesetz zur Änderung des Straßenverkehrsgesetzes und des Pflichtversicherungsgesetzes-Gesetz zum autonomen Fahren. Available online: https://www.bgbl.de/xaver/bgbl/start.xav?startbk=Bundesanzeiger_BGBl&start=//*[@attr_id=%27bgbl121s3108.pdf%27]#__bgbl__%2F%2F*%5B%40attr_id%3D%27bgbl121s3108.pdf%27%5D__1671443424802 (accessed on 21 December 2022).
- Verordnung zur Regelung des Betriebs von Kraftahrzeugen mit Automatisierter und Autonomer Fahrfunktion und zur Änderung straßenverkehrsrechtlicher Vorschriften. Available online: https://www.bgbl.de/xaver/bgbl/start.xav?startbk=Bundesanzeiger_BGBl&start=%2F%2F%2A%5B%40attr_id=%27bgbl122s0986.pdf%27%5D#__bgbl__%2F%2F*%5B%40attr_id%3D%27bgbl122s0986.pdf%27%5D__1671444094651 (accessed on 21 December 2022).
- How Germany Hopes to Get the Edge in Driverless Technology. New York Times, 14 July 2021. Available online: https://www.nytimes.com/2021/07/14/business/germany-autonomous-driving-new-law.html(accessed on 21 December 2022).
- Tallinn University of Technology, “Smart City Concept Map. Available online: https://iseauto.taltech.ee/tark-linn/ (accessed on 21 December 2022).
- Menzel, S. Volkswagen schließt Europcar-Übernahme ab: Carsharing soll Endlich Profitabel Werden. Handelsblatt, 5 July 2022. Available online: https://www.handelsblatt.com/unternehmen/flottenmanagement/mobilitaetsdienstleistung-volkswagen-schliesst-europcar-uebernahme-ab-carsharing-soll-endlich-profitabel-werden/28482010.html(accessed on 21 December 2022).
- Brors, P.; Holzki, L. Start-up Vay: 84 Millionen Euro für Ferngesteuerte Autos im Straßenverkehr. Handelsblatt, 14 December 2021. Available online: https://www.handelsblatt.com/technik/it-internet/autonomes-fahren-start-up-vay-84-millionen-euro-fuer-ferngesteuerte-autos-im-strassenverkehr/27886726.html(accessed on 21 December 2022).
- Krämer, D.; Reuter, F. Voll elektrischer Sharing-Dienst als Erweiterung des ÖPNV in der äußeren Stadt. Hamburg City Authority Transformation of Traffic and Mobility /Behörde für Verkehr und Mobilitätswende, 10 October 2021. Available online: https://www.hamburg.de/bvm/projekte-its/15496292/vay/(accessed on 21 December 2022).
- Song, L.; Cherrett, T.; McLeod, F.; Guan, W. Addressing the Last Mile Problem: Transport Impacts of Collection and Delivery Points. Trans. Res. Rec. 2009, 2097, 9–18. [Google Scholar] [CrossRef] [Green Version]
- ERTICO’s Respective Focus Area Homepage. 2023. Available online: https://ertico.com/focus-areas/connected-automated-driving/ (accessed on 10 February 2023).
- Roblek, V.; Meško, M.; Podbregar, I. Impact of Car Sharing on Urban Sustainability. Sustainability 2021, 13, 905. [Google Scholar] [CrossRef]
- Goodall, N. Non-technological challenges for the remote operation of automated vehicles. Transp. Res. Part A Policy Pract. 2020, 142, 14–26. [Google Scholar] [CrossRef]
- Vargo, S.L.; Lusch, R. Evolving to a New Dominant Logic for Marketing. J. Mark. 2004, 68, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Lanz, R.; Maurer, A. Services and Global Value Chains: Servicification of Manufacturing and Services Networks. Journal of International Commerce. Econ. Policy 2015, 6, 1550014. [Google Scholar] [CrossRef]
- Bellos, I.; Ferguson, M.; Toktay, B. The Car Sharing Economy: Interaction of Business Model Choice and Product Line Design. Manuf. Serv. Oper. Manag. 2017, 19, 165–335. [Google Scholar] [CrossRef]
- Altrichter, H.; Feldman, A.; Posch, P.; Somekh, B. Teachers Investigate Their Work. In An Introduction to Action Research Across the Professions, 2nd ed.; Routledge: Oxfordshire, UK, 2008. [Google Scholar]
- SAE J3016 Levels of Driving. Available online: https://www.sae.org/news/2019/01/sae-updates-j3016-automated-driving-graphic (accessed on 21 December 2022).
- German Patent and Trade Mark Office, Press Release 13 July 2022. Available online: https://www.dpma.de/dpma/veroeffentlichungen/hintergrund/autonomesfahren-technikteil1/index.html (accessed on 21 December 2022).
- Convention. Available online: https://treaties.un.org/pages/ViewDetailsIII.aspx?src=TREATY&mtdsg_no=XI-B-19&chapter=11 (accessed on 21 December 2022).
- UK Road Traffic Amendment. Proposal for Amendment of the Convention Accessible Online for Instance on the U.K. Government. Available online: https://assets.publishing.service.gov.uk/government/uploads/system/uploads/attachment_data/file/1023593/MS_5.2021_Proposal_Amendment_1968_Convention_Road_Traffic.pdf (accessed on 21 December 2022).
- Regulation. Available online: https://unece.org/transport/documents/2021/03/standards/un-regulation-no-155-cyber-security-and-cyber-security (accessed on 21 December 2022).
- Regulation. Available online: https://unece.org/transport/documents/2021/03/standards/un-regulation-no-156-software-update-and-software-update (accessed on 21 December 2022).
- Regulation. Available online: https://unece.org/transport/documents/2021/03/standards/un-regulation-no-157-automated-lane-keeping-systems-alks (accessed on 21 December 2022).
- Ayad, P.; Schuster, S. The Road to Autonomous Vehicles in Europe. Financier worldwide, March 2022. Available online: https://www.financierworldwide.com/the-road-to-autonomous-vehicles-in-europe#.Yk2KHudBy70(accessed on 21 December 2022).
- European Commission, Draft Implementing Rules for Regulation (EU) 2019/2144. Available online: https://circabc.europa.eu/sd/a/4664e8a3-0634-4430-8035-9fc07d99b2bf/Com%20Impl%20act%20AD%20V4.1.pdf?fbclid=IwAR2A3igB10GotAl4dOfaHYvkyH4gA_oVCUWIFUr4qb9biVBtL4wz3T6-me8 (accessed on 21 December 2022).
- German Federal Ministry for Digital and Transport, Neue Fahrzeugsicherheitssysteme. Press Release of 9 February 2022. Available online: https://www.bmvi.de/SharedDocs/DE/Artikel/StV/Strassenverkehr/neue-fahrzeugsicherheitssysteme.html (accessed on 21 December 2022).
- Act amending the Road Traffic Act and the Compulsory Insurance Act-Autonomous Driving Act (19/27439), for Details see Press Release of the German Bundestag. Available online: https://www.bundestag.de/dokumente/textarchiv/2021/kw20-de-autonomes-fahren-840196 (accessed on 21 December 2022).
- German Federal Parliament (Bundestag). Eighth Act Amending the Road Traffic Act; Bundesgesetzblatt: Berlin, Germany, 2017; Part I, No 38. [Google Scholar]
- Hope, G. Japan is One Step Closer to Launching Driverless Vehicles. IoT World Today, 10 March 2022. Available online: https://www.iotworldtoday.com/2022/03/10/japan-is-one-step-closer-to-launching-driverless-vehicles/(accessed on 21 December 2022).
- Ben-David, R. New legislation Paves Path for Trial of Driverless Autonomous Taxis in Israel. Times of Israel, 9 March 2022. Available online: https://www.timesofisrael.com/new-legislation-paves-path-for-trial-of-driverless-autonomous-taxis-in-israel/(accessed on 21 December 2022).
- Shepardson, S. U.S. Eliminates Human Controls Requirement for Fully Automated Vehicles. Reuters, 11 March 2022. Available online: https://www.reuters.com/business/autos-transportation/us-eliminates-human-controls-requirement-fully-automated-vehicles-2022-03-11(accessed on 21 December 2022).
- Doll, S. The Top Five Best-Equipped Countries to Support Autonomous Vehicles—Who’s Leading the Self-Driving Revolution? Eletrek, 4 March 2022. Available online: https://electrek.co/2022/03/04/the-top-five-best-equipped-countries-to-support-autonomous-vehicles-whos-leading-the-self-driving-revolution/(accessed on 21 December 2022).
- Jendrischik, M. Wie Vay mit Teledriving den Weg für Autonomes Fahren Frei Macht. Cleanthinking.de, 14 December 2021. Available online: https://www.cleanthinking.de/vay-teledriving-autonomes-fahren-hamburg-finanzierung/(accessed on 21 December 2022).
- Pluta, W. Carsharing ohne Parkplatzsuche. Golem.de, 2 September 2022. Available online: https://www.golem.de/news/telefahren-mit-vay-carsharing-ohne-parkplatzsuche-2209-167973.html(accessed on 21 December 2022).
- Dix, A.; Helmert, J.; Wagner, T.; Pannasch, S. Autonom und unfallfrei—Betrachtungen zur Rolle der Technischen Aufsicht im Kontext des autonomen Fahrens. J. Psychol. Des Alltagshandelns/Psychol. Everyday Act. 2021, 14, 1–14. [Google Scholar]
- Roshan, B. Automatisiertes und autonomes Fahren im Überblick. Neue Jurist. Wochenschr.-Spez. 2021, 137–138. Available online: https://bmdv.bund.de/DE/Themen/Digitales/Automatisiertes-und-vernetztes-Fahren/Automatisiertes-und-vernetztes-Fahren/automatisiertes-und-vernetztes-fahren.html (accessed on 18 February 2023).
- Ministry of Economic Affairs and Communications. Eesti Lubab Osad Isejuhtivad Autod Tänasest Tänavatele. Press release of 2 March 2017. Available online: https://www.mkm.ee/uudised/eesti-lubab-osad-isejuhtivad-autod-tanasest-tanavatele (accessed on 21 December 2022).
- Hoffmann, T. Isesõidukid—Kes Juhib, Kes Vastutab? Arenguseire Keskus, Published 20 June 2022. Available online: https://arenguseire.ee/pikksilm/isesoidukid-kes-juhib-kes-vastutab/ (accessed on 21 December 2022).
- Liive, R. Maanteeamet on Teedele Lubanud Kaks Isejuhtivat Sõidukit. Car Genius, 22 January 2020. Available online: https://auto.geenius.ee/rubriik/uudis/maanteeamet-on-teedele-lubanud-kaks-isejuhtivat-soidukit/(accessed on 21 December 2022).
- Smith, B.W. Automated Vehicles Are Probably Legal in the United States. Tex. A&M Law Rev. 2014, 1, 411–521. [Google Scholar]
- Trimble, T.E.; Loftus-Otway, L.; Gallun, S.; Morrissey, S.; Havinoviski, G.; Serian, B.; Johnson, G.; National Cooperative Highway Research Program; Transportation Research Board; National Academies of Sciences, Engineering, and Medicine. Implications of Connected and Automated Driving Systems, Vol. 2: State Legal and Regulatory Audit; Transportation Research Board: Washington, DC, USA, 2018. [Google Scholar] [CrossRef]
- California Department of Motor Vehicles. Order to Adopt, Title 13, Division 1, Chapter 1, Article 3.7 Testing of Autonomous Vehicles. Available online: https://www.dmv.ca.gov/portal/uploads/2020/06/Adopted-Regulatory-Text-2019.pdf (accessed on 21 December 2022).
- Uniform Law Commission. Uniform Automated Operation of Vehicles Act. In Proceedings of the National Conference of Commissioners on Uniform State Laws, Chicago, IL, USA, 2019. [Google Scholar]
- Regulation (EU) 2016/679 of the European Parliament and of the Council-EU General Data Protection Regulation. Available online: https://gdpr-info.eu (accessed on 21 December 2022).
- Directive 95/46/EC on the Protection of Individuals with Regard to the Processing of Personal Data (Data Protection Directive). Available online: http://www.wipo.int/wipolex/en/details.jsp?id=13580 (accessed on 21 December 2022).
- Greger, R. Haftungsfragen beim automatisierten Fahren. Neue Z. Für Verk. 2018, 31, 1–5. [Google Scholar]
- Regulation (EC) No 864/2007 of the European Parliament and of the Council of 11 July 2007 on the Law Applicable to Non-contractual Obligations. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/PDF/?uri=CELEX:32007R0864&from=en (accessed on 21 December 2022).
- Pild, M.; Turk, K.; Analüüs SAE tase 4 ja 5 Sõidukite Kasutusele Võtmiseks. Study accessible online at Trinity Law Firm’s homepage. Available online: https://triniti.ee/wp-content/uploads/sites/2/2017/10/L%C3%95PPRAPORT_Anal%C3%BC%C3%BCs-SAE-tase-4-ja-5-s%C3%B5idukite-kasutusele-v%C3%B5tmiseks_Riigikantselei_okt-2017.pdf (accessed on 21 December 2022).
- Draft legislation on Artificial Intelligence 2021/0106(COD). Available online: https://eur-lex.europa.eu/legal-content/ET/TXT/HTML/?uri=CELEX:52021PC0206&from=EN (accessed on 21 December 2022).
- Werkmeister, C.; Weitz, C.A. Freie Fahrt für Autonome Fahrzeuge? Legal Tribute Online, 30 June 2022. Available online: https://www.lto.de/recht/kanzleien-unternehmen/k/mobilitaet-rechtsfragen-stvg-bmdv-ki-datenschutz-afgbv-autonomes-fahren/(accessed on 21 December 2022).
- McNicol, J.; Modus, N. Report on Standardizing Remote Operation of Vehicles. BSI CAV Standards Programme (Sponsored by the UK Government’s Centre for Connected and Autonomous Vehicles (CCAV) in Conjunction with the Department for Transport and Innovate UK). July 2022. Available online: https://www.bsigroup.com/en-GB/CAV/cav-resources/standardizing-remote-operation-of-vehicles/ (accessed on 21 December 2022).
Figure 1.
Survey results about implementation of autonomous vehicles in Baltic Ports; source: authors calculation. Reasons for no activities: (1) Immature technology, (2) Fear of cybercrime, (3) Risk of economic espionage.
Figure 1.
Survey results about implementation of autonomous vehicles in Baltic Ports; source: authors calculation. Reasons for no activities: (1) Immature technology, (2) Fear of cybercrime, (3) Risk of economic espionage.

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Hoffmann, T.; Prause, G. On the Legal and Economic Implications of Tele-Driving. Machines 2023, 11, 331. https://doi.org/10.3390/machines11030331
AMA Style
Hoffmann T, Prause G. On the Legal and Economic Implications of Tele-Driving. Machines. 2023; 11(3):331. https://doi.org/10.3390/machines11030331
Chicago/Turabian StyleHoffmann, Thomas, and Gunnar Prause. 2023. "On the Legal and Economic Implications of Tele-Driving" Machines 11, no. 3: 331. https://doi.org/10.3390/machines11030331
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.