

Early Fault Warning Method of Wind Turbine Main Transmission System Based on SCADA and CMS Data
Abstract
:1. Introduction
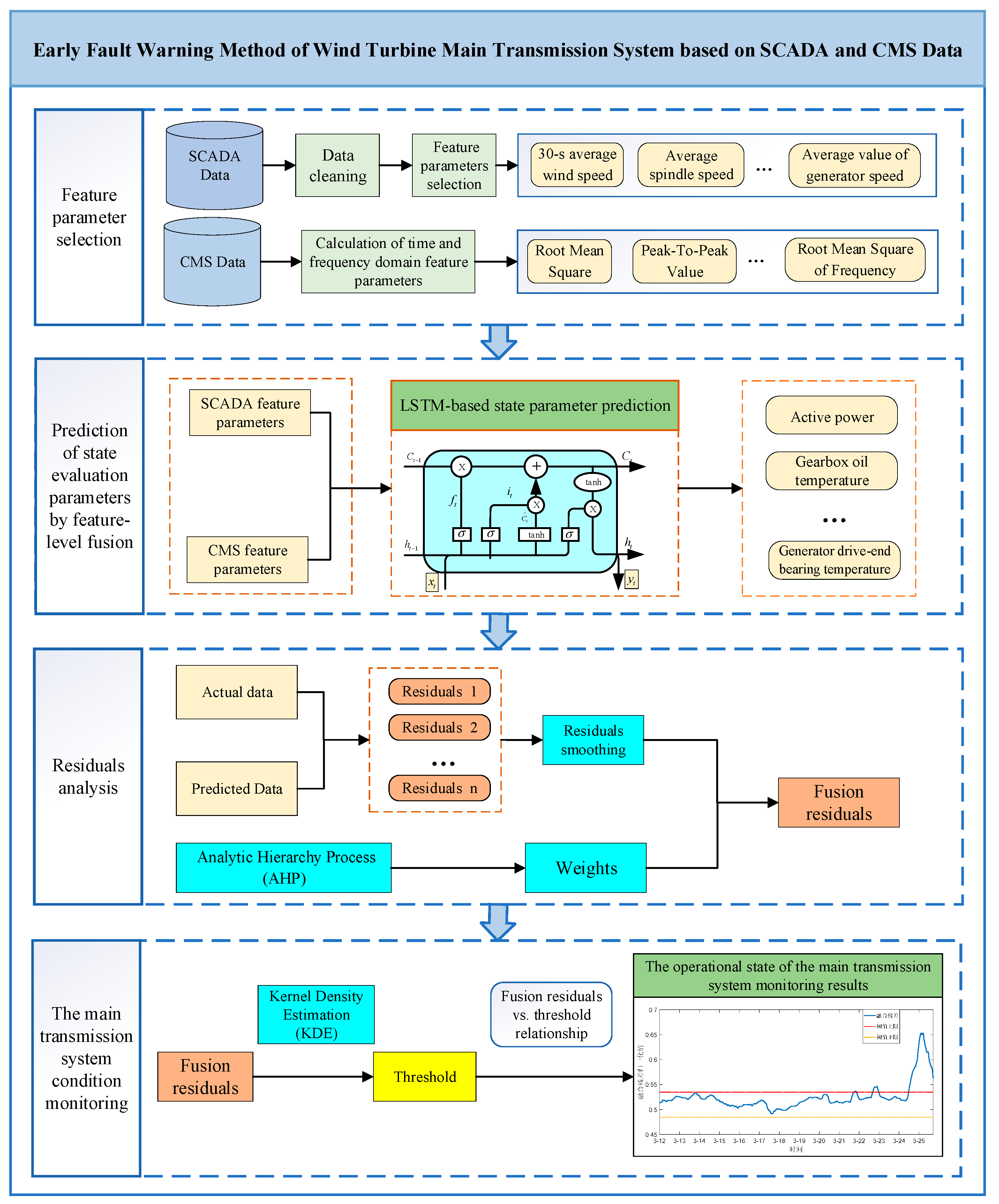
- By fully exploiting the advantages of SCADA and CMS, an early fault warning method for the wind turbine main transmission system is proposed.
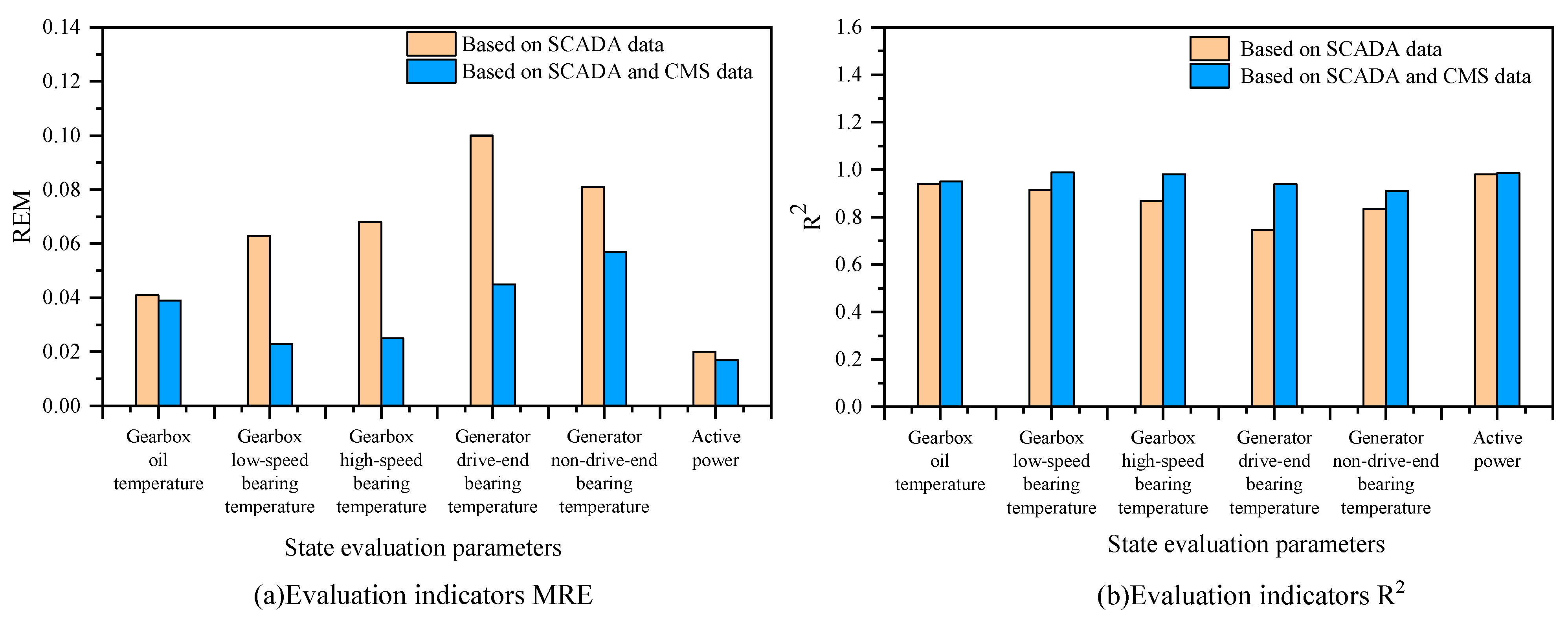
- Based on SCADA and CMS data, the prediction model of main transmission system condition evaluation parameters with feature-level fusion is established, which has better generalization performance and prediction accuracy.
- A multi-residual fusion method was used to evaluate the main transmission system condition, which will solve the difficulty of accurately monitoring and characterizing of the operational state by a single indicator.
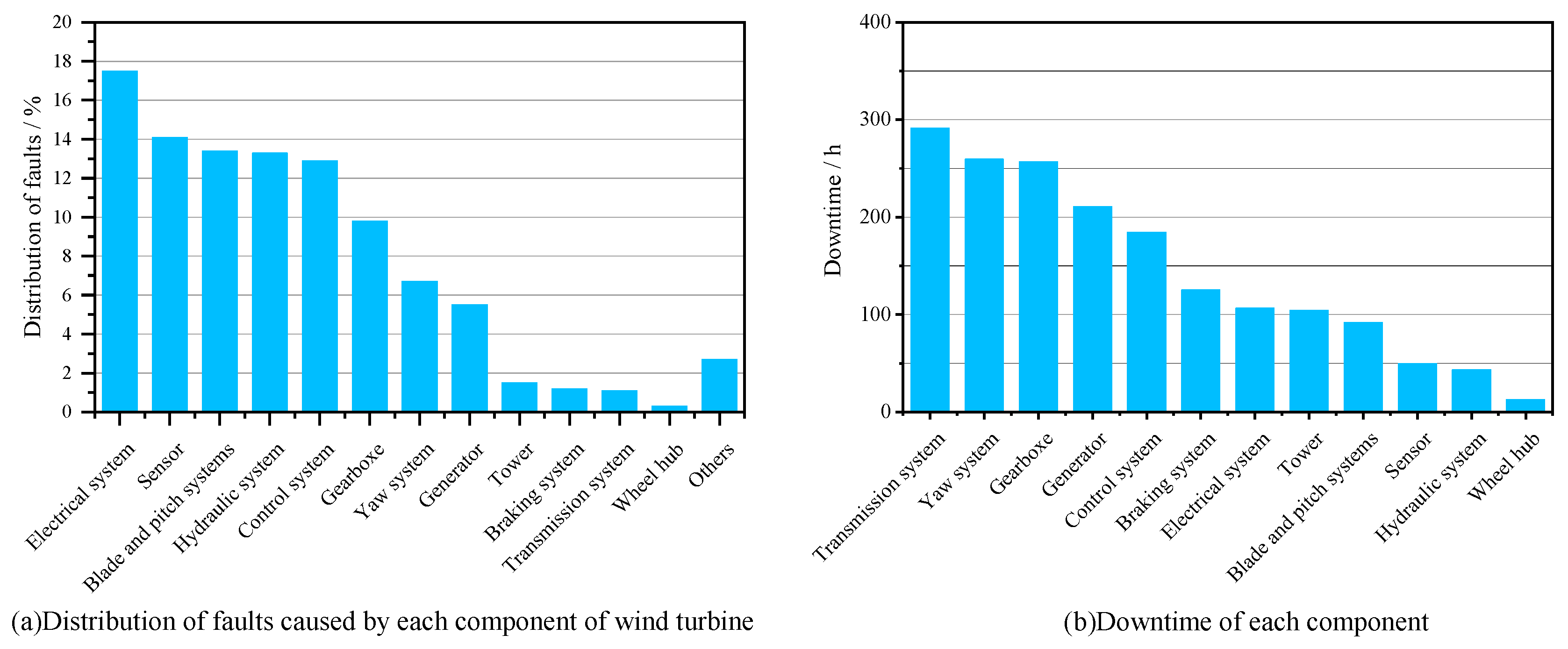
2. Parameters for Early Fault Warning
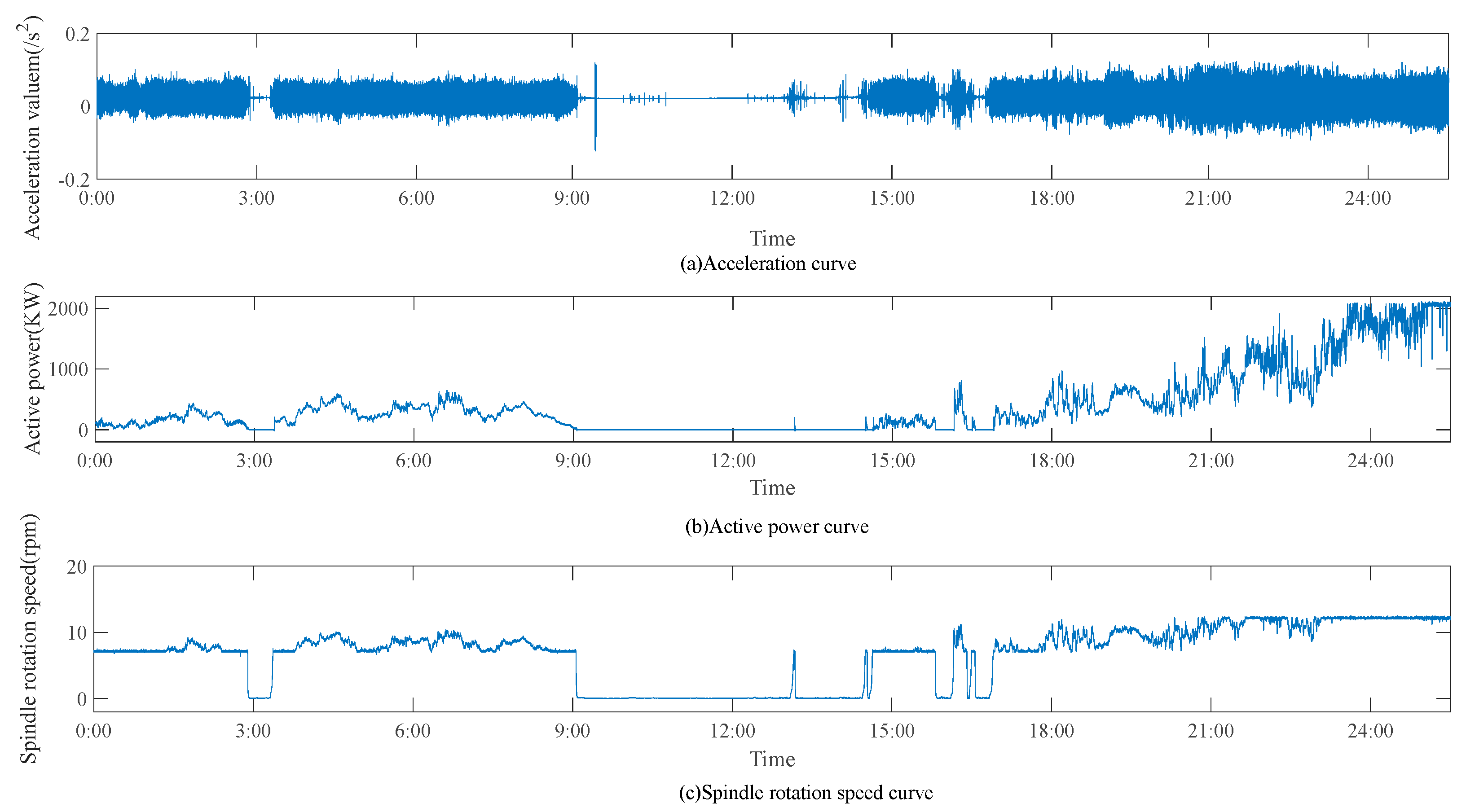
2.1. State Evaluation Parameters
2.2. Feature Parameter Selection
- (1)
- Selection of feature parameters from CMS
- (2)
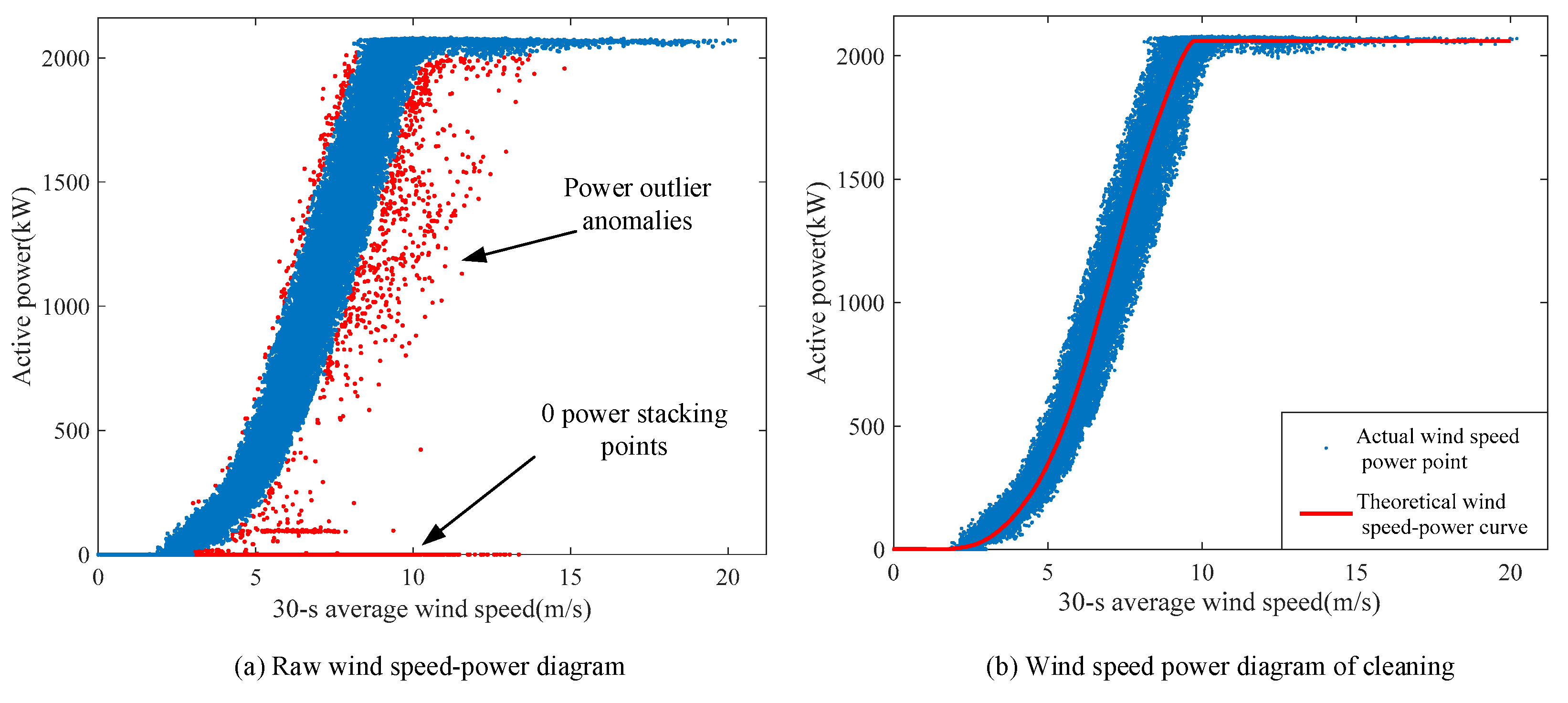
- Selection of feature parameters from SCADA
- Data cleaning
- Selection of SCADA feature parameters
3. Prediction of State Evaluation Parameters
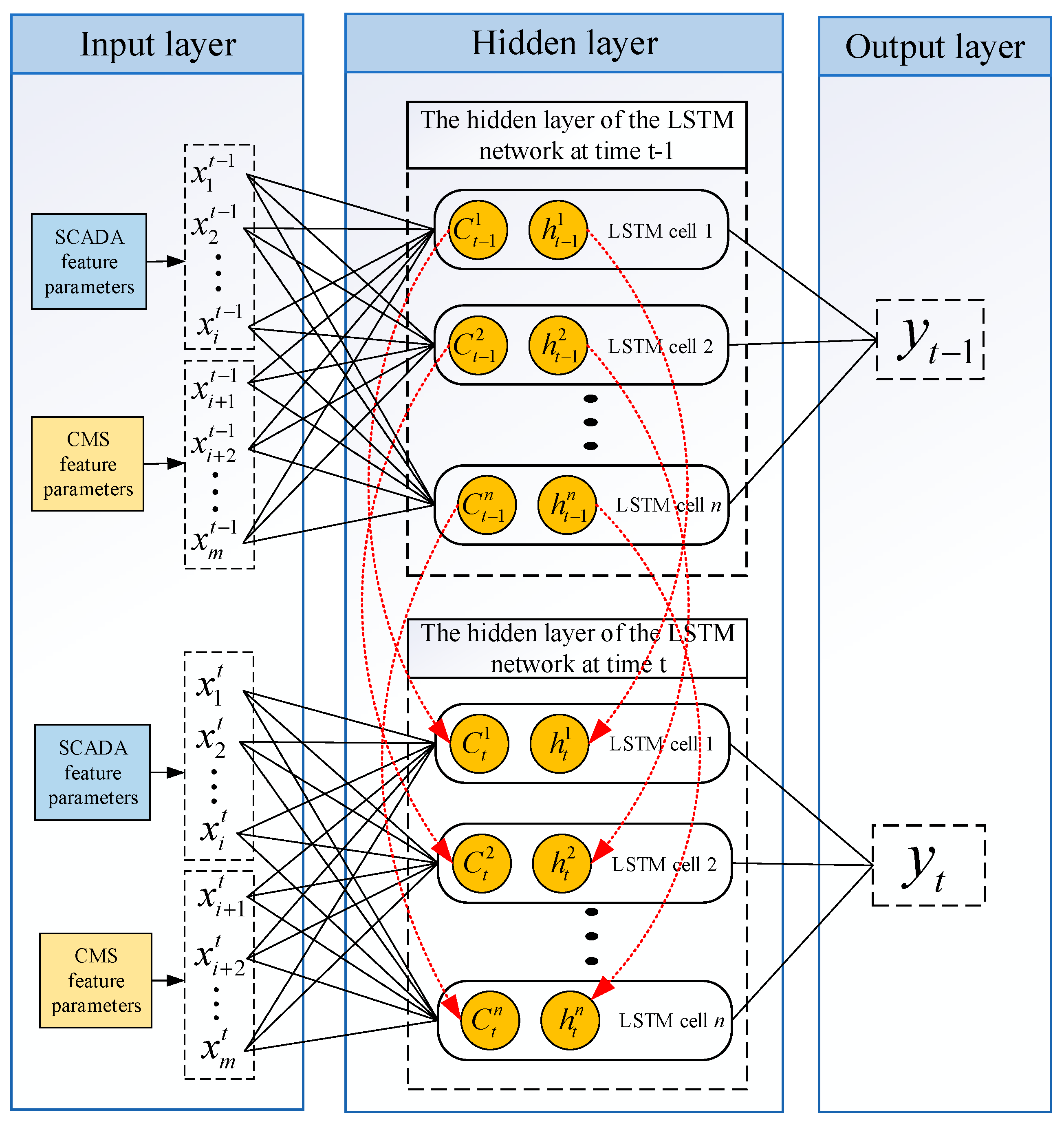
3.1. LSTM-Based Fusion of SCADA and CMS Feature Parameters
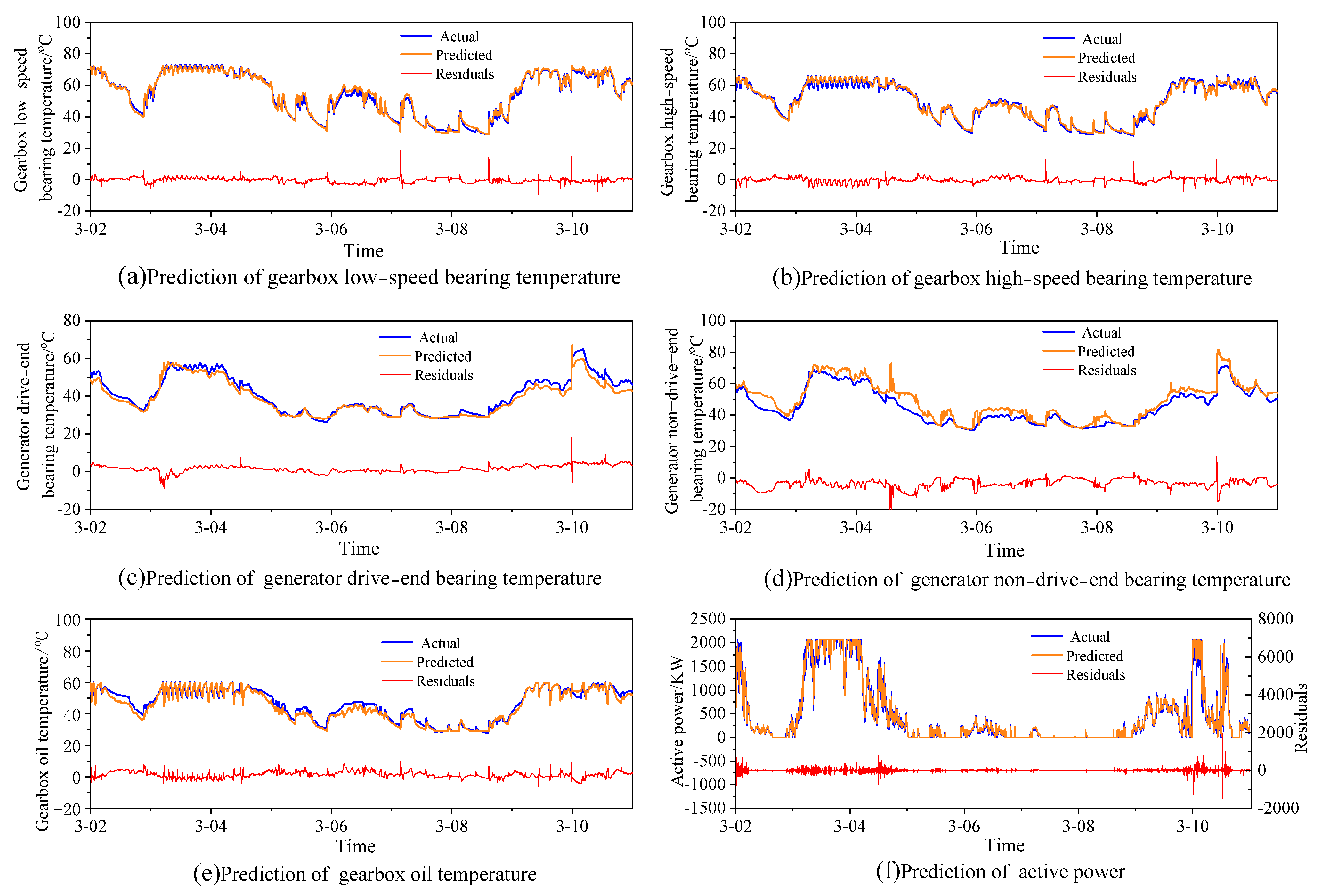
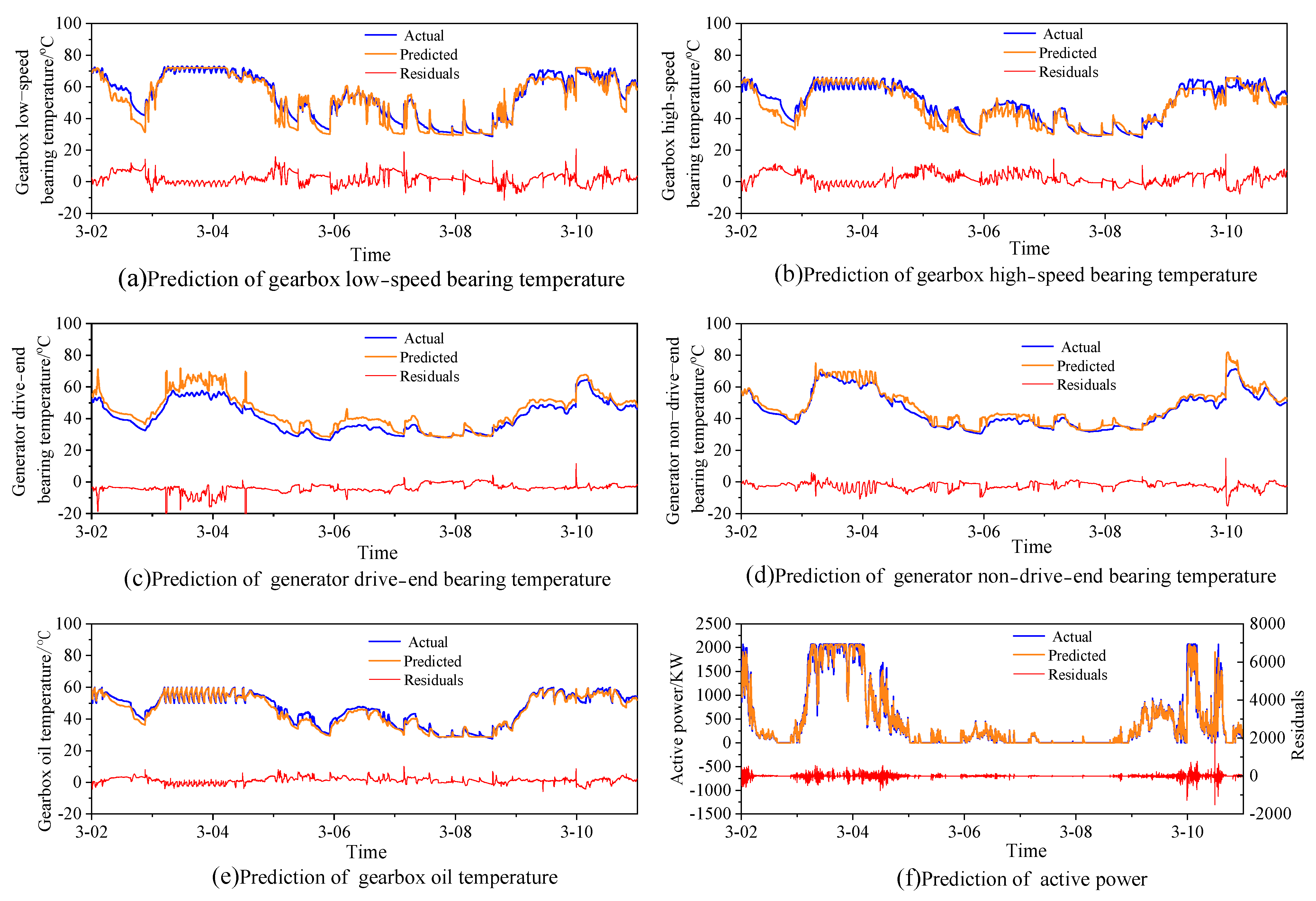
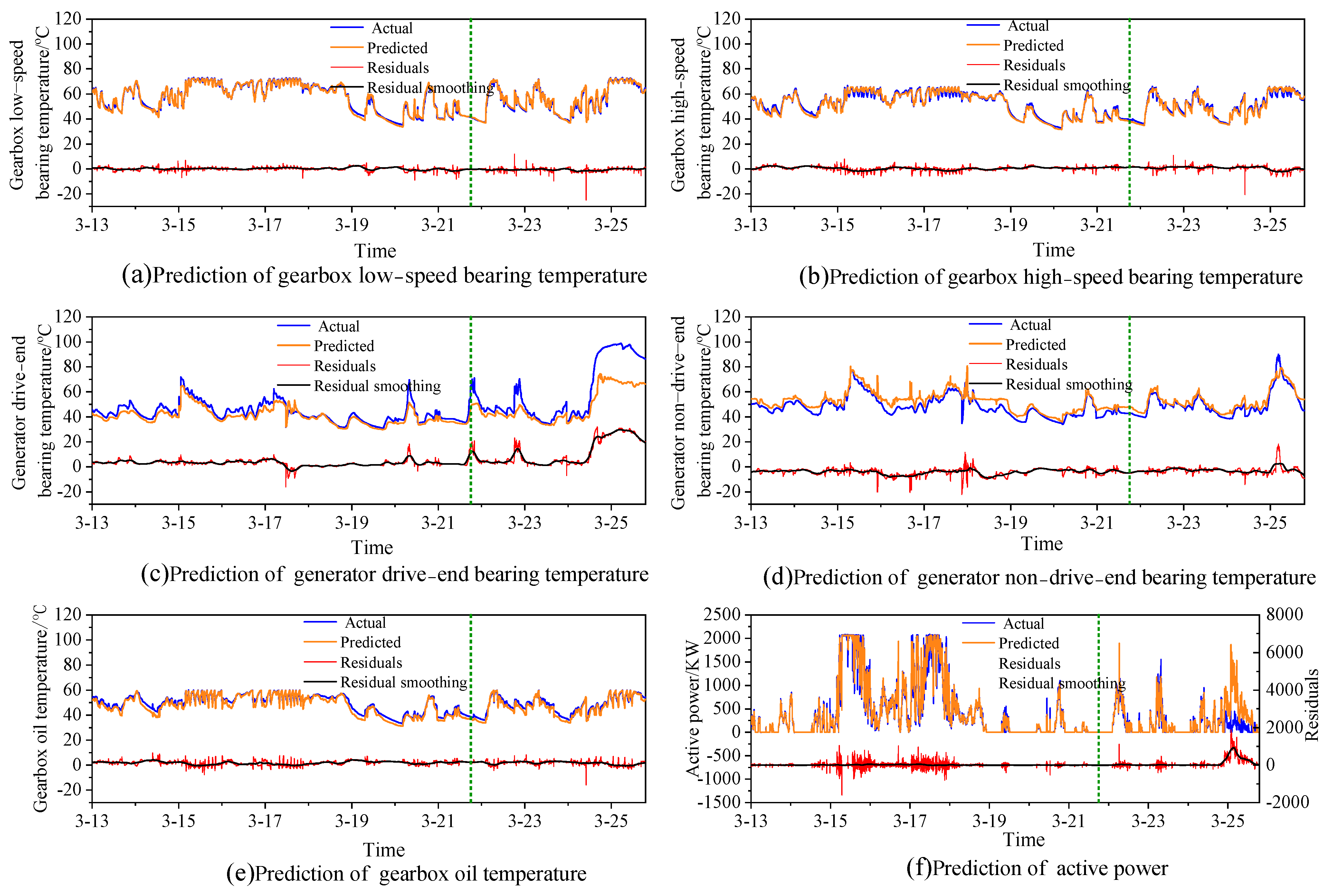
3.2. Prediction of State Evaluation Parameters on Feature-Level Fusion
4. Early Fault Warning Method
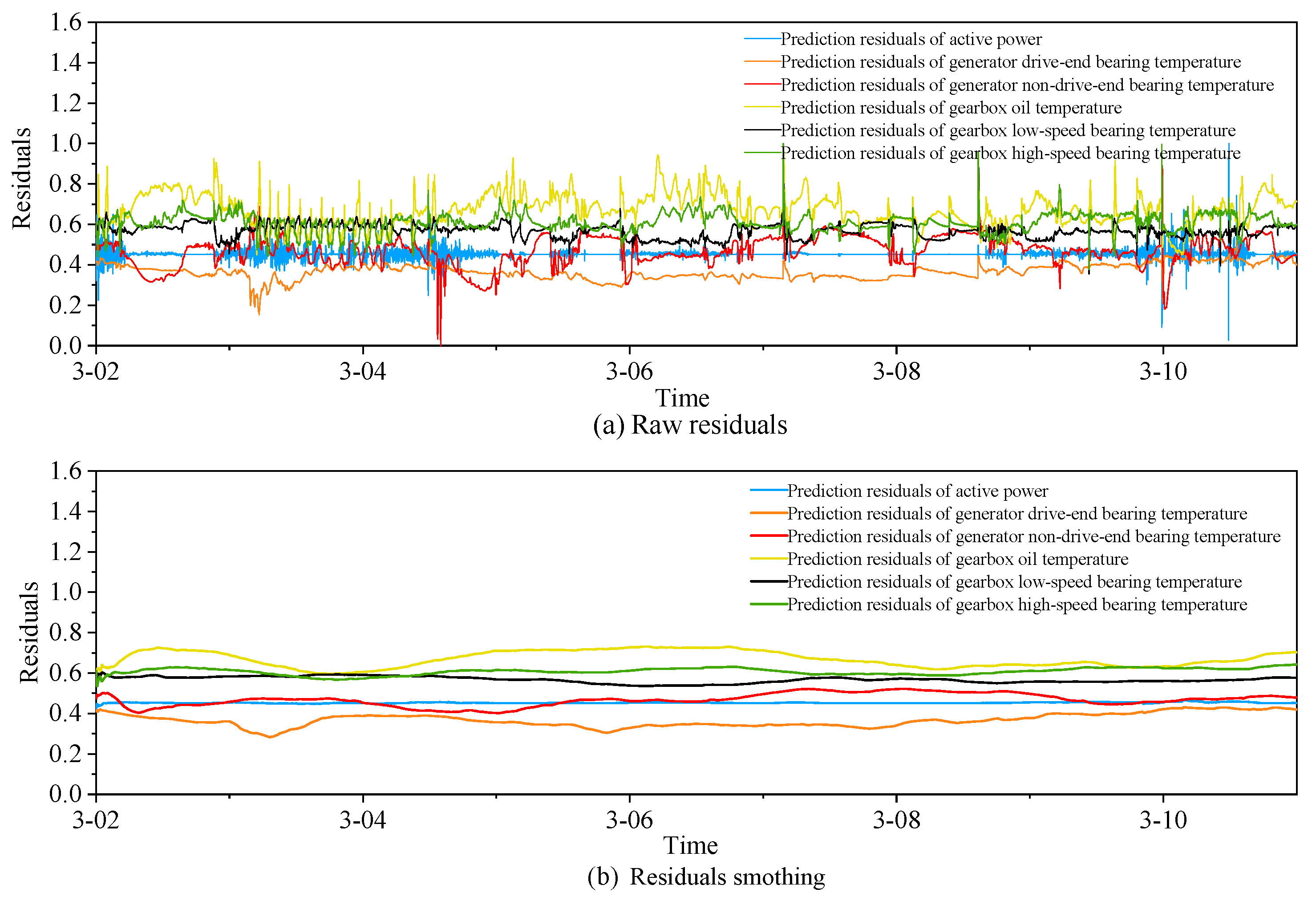
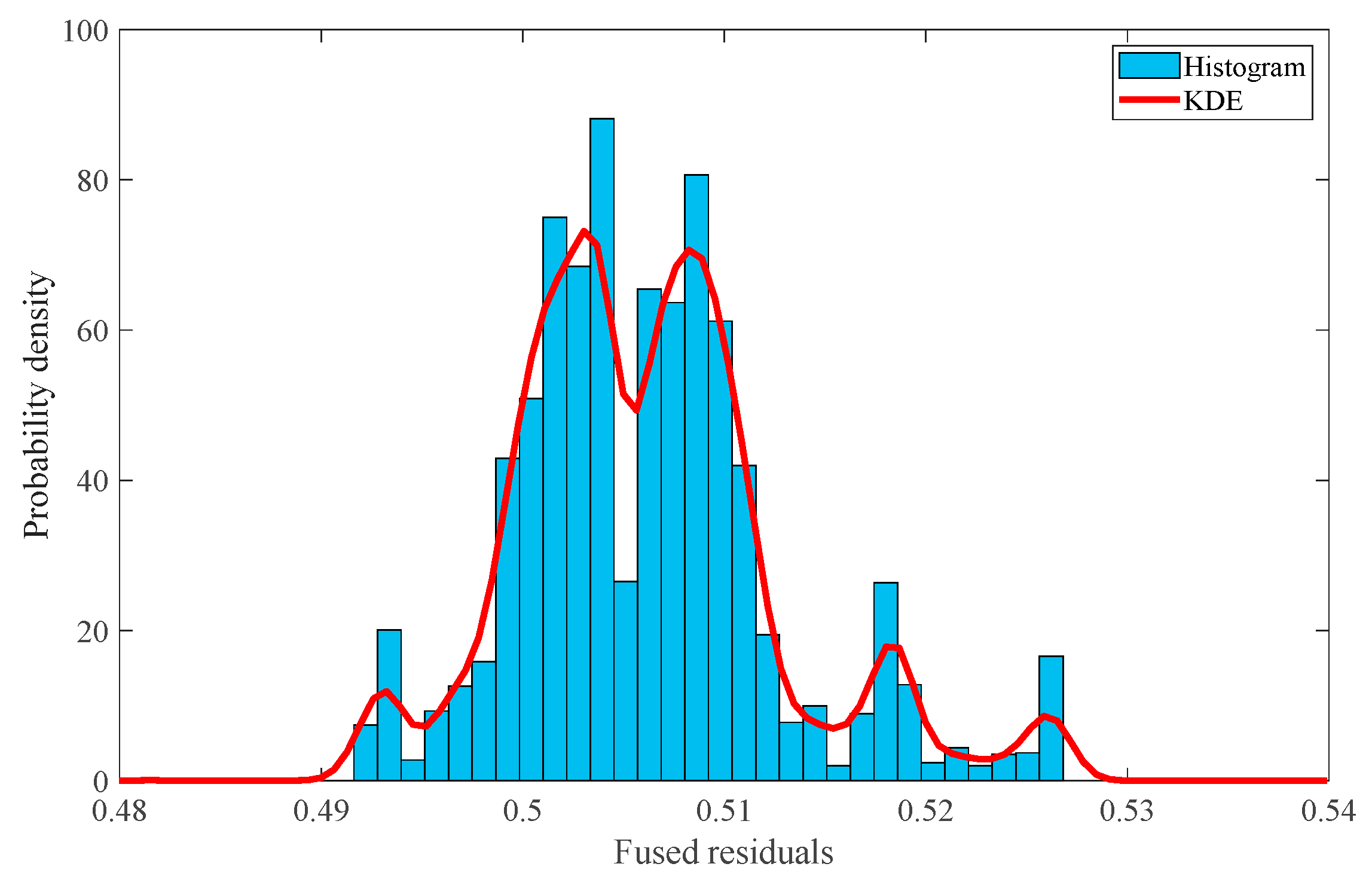
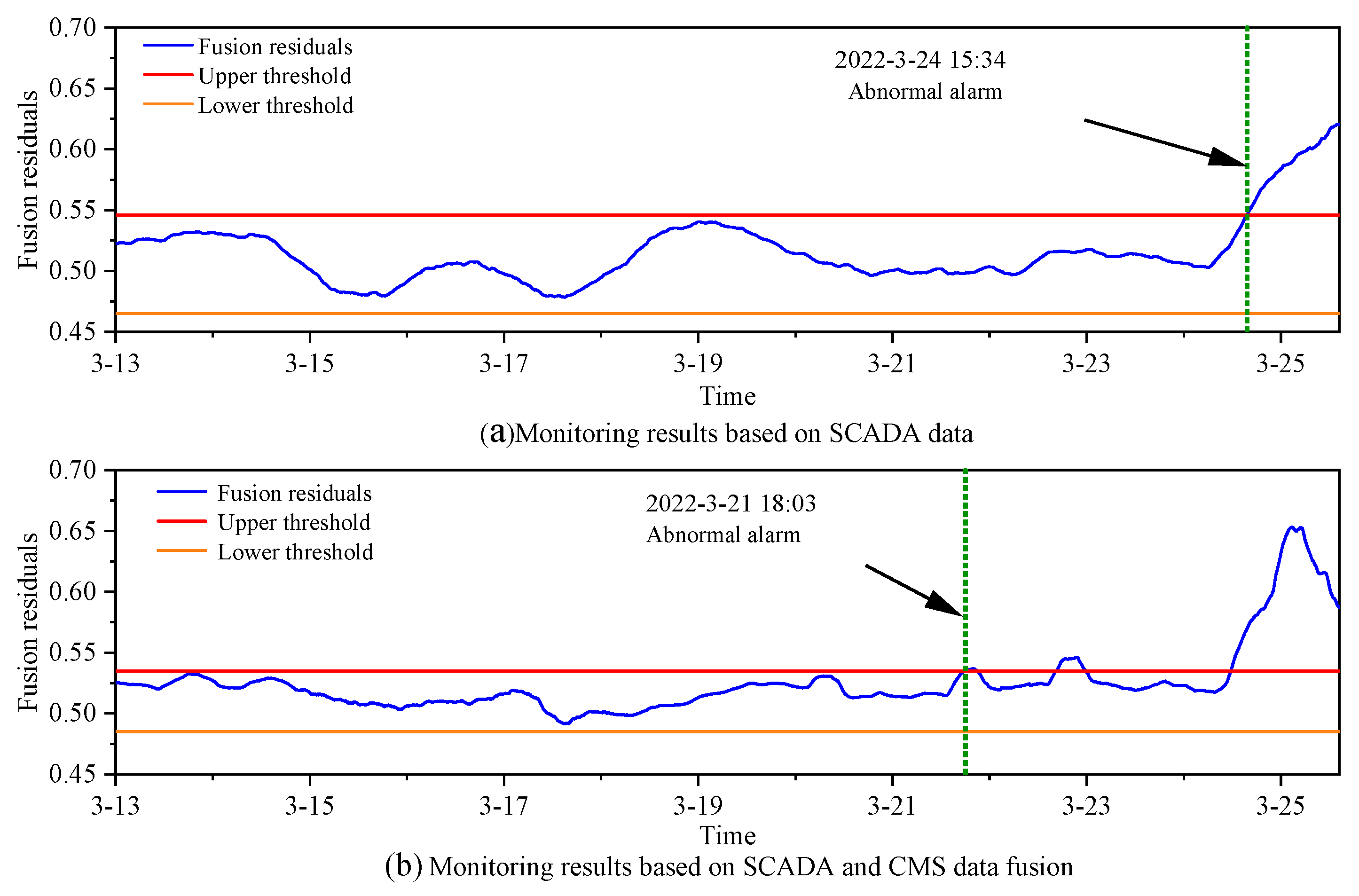
4.1. Multiple Residual Fusion Analysis
4.2. Monitoring Thresholds
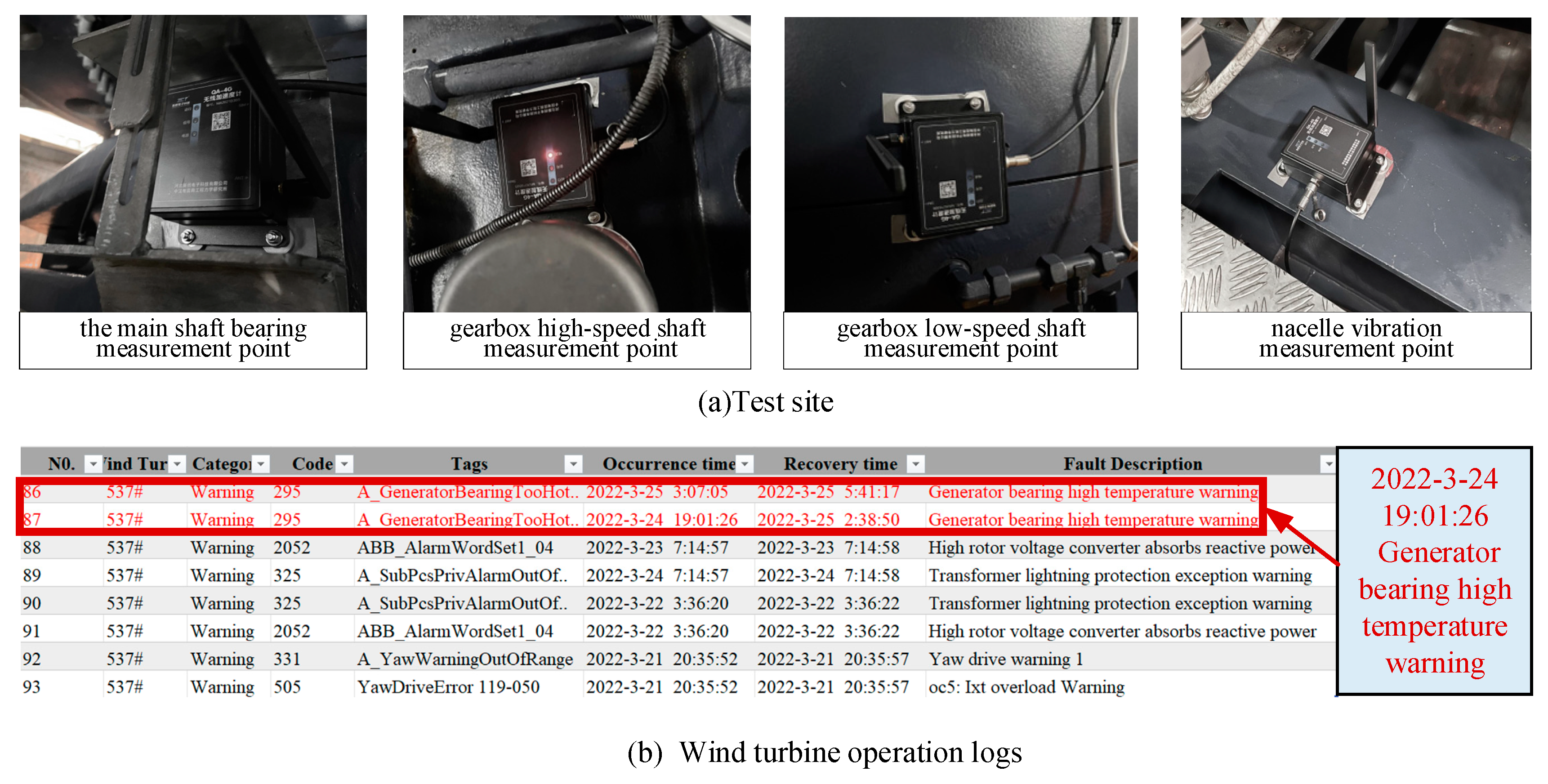
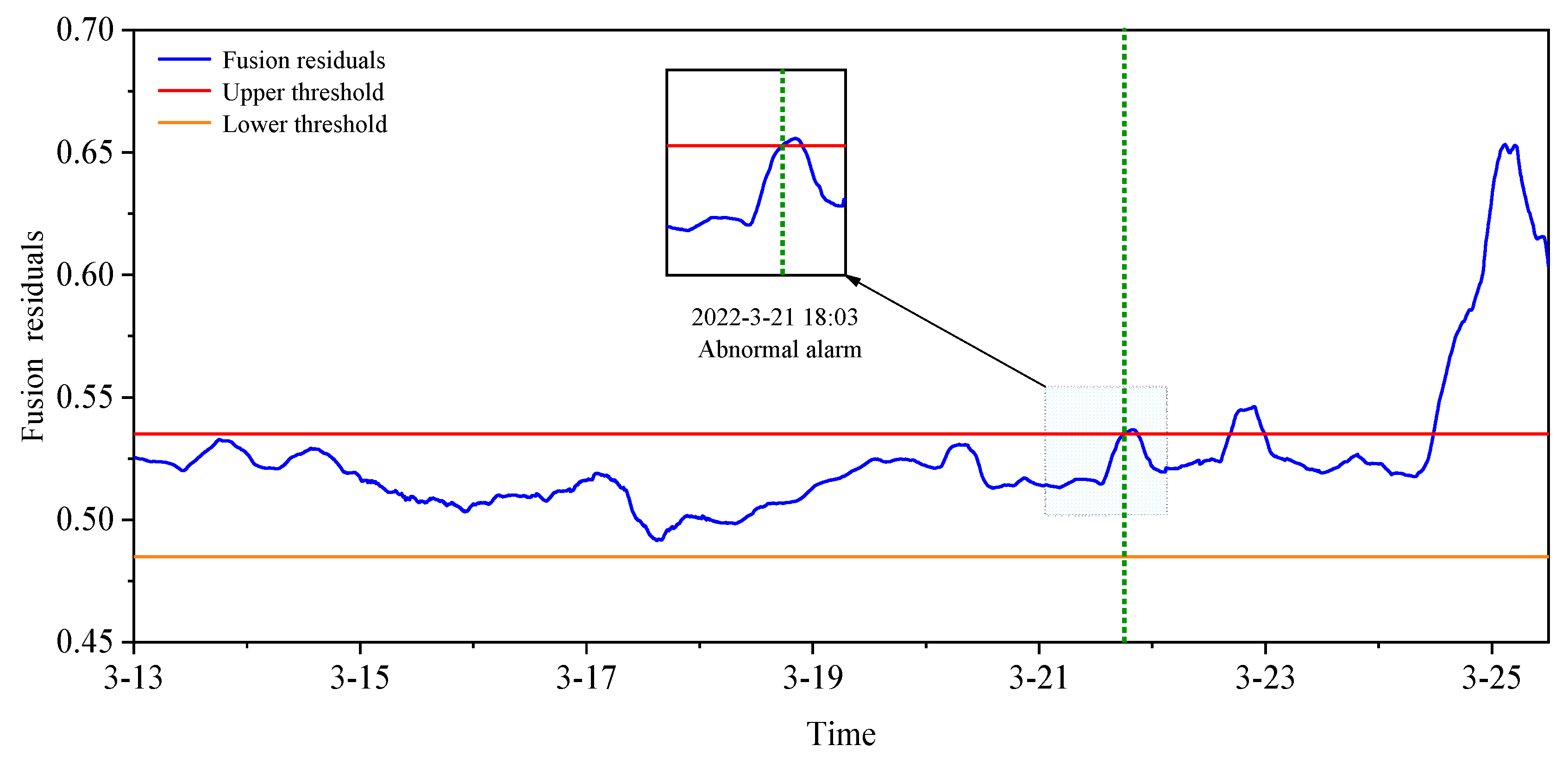
5. Case Verification Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chu, S.; Majumdar, A. Opportunities and challenges for a sustainable energy future. Nature 2012, 488, 294–303. [Google Scholar] [CrossRef] [PubMed]
- Wang, T.; Han, Q.; Chu, F.; Feng, Z. Vibration based condition monitoring and fault diagnosis of wind turbine planetary gearbox: A review. Mech. Syst. Signal Process. 2019, 126, 662–685. [Google Scholar] [CrossRef]
- Sun, H.; Qiu, C.; Lu, L.; Gao, X.; Chen, J.; Yang, H. Wind turbine power modelling and optimization using artificial neural network with wind field experimental data. Appl. Energy 2020, 280, 115880. [Google Scholar] [CrossRef]
- Pérez, J.M.P.; Márquez, F.P.G.; Tobias, A.; Papaelias, M. Wind turbine reliability analysis. Renew. Sustain. Energy Rev. 2013, 23, 463–472. [Google Scholar] [CrossRef]
- Li, Y.; Zhu, C.C.; Tao, Y.C.; Song, C.S.; Tan, J.J. Research States and Development Tendency of Wind Turbine Reliability. Chin. J. Constr. Mach. 2017, 28, 1125–1133. [Google Scholar]
- Ferguson, D.; McDonald, A.; Carroll, J.; Lee, H. Standardisation of wind turbine SCADA data for gearbox fault detection. J. Eng. 2019, 2019, 5147–5151. [Google Scholar] [CrossRef]
- Corley, B.; Carroll, J.; McDonald, A. Fault detection of wind turbine gearbox using thermal network modelling and SCADA data. J. Phys. Conf. Ser. 2020, 1618, 022042. [Google Scholar] [CrossRef]
- Pandit, R.K.; Infield, D. SCADA based nonparametric models for condition monitoring of a wind turbine. J. Eng. 2019, 2019, 4723–4727. [Google Scholar] [CrossRef]
- Dai, J.; Zeng, H.; Zhang, F.; Chen, H.; Li, M. Study on Obtaining Real Power Curve of Wind Turbines Using SCADA Data. Front. Energy Res. 2022, 10, 3927598. [Google Scholar] [CrossRef]
- Dao, P.B.; Staszewski, W.J.; Barszcz, T.; Uhl, T. Condition monitoring and fault detection in wind turbines based on cointegration analysis of SCADA data. Renew. Energy 2018, 116, 107–122. [Google Scholar] [CrossRef]
- Chen, N.; Yu, R.; Chen, Y.; Xie, H. Hierarchical method for wind turbine prognosis using SCADA data. IET Renew. Power Gener. 2017, 11, 403–410. [Google Scholar] [CrossRef]
- Zhang, F.; Liu, D.S.; Dai, J.C.; Wang, C.; Shen, X.B. An Operating Condition Recognition Method of Wind Turbine Based on SCADA Parameter Relations. J. Mech. Eng. 2019, 55, 1–9. [Google Scholar] [CrossRef]
- Fu, J.; Chu, J.; Guo, P.; Chen, Z. Condition monitoring of wind turbine gearbox bearing based on deep learning model. IEEE Access 2019, 7, 57078–57087. [Google Scholar] [CrossRef]
- Zhao, H.; Liu, H.; Hu, W.; Yan, X. Anomaly detection and fault analysis of wind turbine components based on deep learning network. Renew. Energy 2018, 127, 825–834. [Google Scholar] [CrossRef]
- Bangalore, P.; Letzgus, S.; Karlsson, D.; Patriksson, M. An artificial neural network-based condition monitoring method for wind turbines, with application to the monitoring of the gearbox. Wind. Energy 2017, 20, 1421–1438. [Google Scholar] [CrossRef]
- Rezamand, M.; Kordestani, M.; Carriveau, R.; Ting, D.S.-K.; Saif, M. A new hybrid fault detection method for wind turbine blades using recursive PCA and wavelet-based PDF. IEEE Sens. J. 2019, 20, 2023–2033. [Google Scholar] [CrossRef]
- Jin, X.; Xu, Z.; Qiao, W. Condition Monitoring of Wind Turbine Generators Using SCADA Data Analysis. IEEE Trans. Sustain. Energy 2021, 12, 202–210. [Google Scholar] [CrossRef]
- Chen, H.; Liu, H.; Chu, X.; Liu, Q.; Xue, D. Anomaly detection and critical SCADA parameters identification for wind turbines based on LSTM-AE neural network. Renew. Energy 2021, 172, 829–840. [Google Scholar] [CrossRef]
- Leahy, K.; Hu, R.L.; Konstantakopoulos, I.C.; Spanos, C.J.; Agogino, A.M.; O’Sullivan, D.T.J. Diagnosing and PredictingWind Turbine Faults from SCADA Data Using Support Vector Machines. Int. J. Progn. Health Manag. 2018, 9, 6. [Google Scholar] [CrossRef]
- Hu, A.; Lian, J.; Xiang, L. Early Fault Identification of Wind Turbine Based on ACNN and BI-LSTM. Acta Energ. Sol. Sin. 2021, 42, 143–149. [Google Scholar]
- Peng, J.; Kimmig, A.; Niu, Z.; Wang, J.; Liu, X.; Wang, D.; Ovtcharova, J. Wind turbine failure prediction and health assessment based on adaptive maximum mean discrepancy. Int. J. Electr. Power Energy Syst. 2022, 134, 107391. [Google Scholar] [CrossRef]
- Zimrozand, R.; Bartkowiak, A. Investigation on spectral structure of gearbox vibration signals by principal component analysis for condition monitoring purposes. J. Phys. Conf. Ser. 2011, 305, 012075. [Google Scholar] [CrossRef]
- Pan, Y.; Hong, R.; Chen, J.; Singh, J.; Jia, X. Performance degradation assessment of a wind turbine gearbox based on multi-sensor data fusion. Mech. Mach. Theory 2019, 137, 509–526. [Google Scholar] [CrossRef]
- Ogataand, J.; Murakawa, M. Vibration-based anomaly detection using FLAC features for wind turbine condition monitoring. In Proceedings of the 8th European Workshop on Structural Health Monitoring, Bilbao, Spain, 5–8 July 2016; pp. 5–8. [Google Scholar]
- Li, C.; Sanchez, R.-V.; Zurita, G.; Cerrada, M.; Cabrera, D.; Vásquez, R.E. Gearbox fault diagnosis based on deep random forest fusion of acoustic and vibratory signals. Mech. Syst. Signal Process. 2016, 76, 283–293. [Google Scholar] [CrossRef]
- Li, Z.E.; Zhang, X.Y.; Hu, W.; Xie, L.R. State Assessment and Prediction of Wind Turbine High Speed Shaft Bearing Based on Health Index. Acta Energ. Sol. Sin. 2021, 42, 290–297. [Google Scholar]
- Huang, N.T.; Yang, X.H.; Cai, G.W.; Song, X.; Chen, Q.Z.; Zhao, W.G. A Deep Adversarial Diagnosis Method for Wind Turbine Main Bearing Fault with Imbalanced Small Sample Scenarios. Proc. CSEE 2020, 40, 563–574. [Google Scholar]
- Pu, Z.; Li, C.; Zhang, S.; Bai, Y. Fault diagnosis for wind turbine gearboxes by using deep enhanced fusion network. IEEE Trans. Instrum. Meas. 2020, 70, 1–11. [Google Scholar] [CrossRef]
- Gómez, M.; Marklund, P.; Strombergsson, D.; Castejón, C.; García-Prada, J.C. Analysis of vibration signals of drivetrain failures in wind turbines for condition monitoring. Exp. Tech. 2021, 45, 1–12. [Google Scholar] [CrossRef]
- Isham, M.F.; Leong, M.S.; Lim, M.H.; Bin Ahmad, Z.A. Intelligent wind turbine gearbox diagnosis using VMDEA and ELM. Wind. Energy 2019, 22, 813–833. [Google Scholar] [CrossRef]
- Rashid, H.; Khalaji, E.; Rasheed, J.; Batunlu, C. Fault Prediction of Wind Turbine Gearbox Based on SCADA Data and Machine Learning. In Proceedings of the 2020 10th International Conference on Advanced Computer Information Technologies (ACIT), Deggendorf, Germany, 13–15 May 2020; pp. 391–395. [Google Scholar]
- Zhao, H.S.; Liu, Y.S.; Zhang, X.T.; Guo, W. Research on early Fault Prediction of Wind Turbine Gearbox. Adv. Mater. Res. 2013, 608, 522–528. [Google Scholar] [CrossRef]
- Qiao, S.; Zhou, J.X.; Zhang, X.F.; Wang, C.L.; Shen, Y. Dynamic Temperature Response and Experimental Study of Two-Stage Gear Transmission System In Wind Turbine. Acta Energ. Sol. Sin. 2022, 43, 116–124. [Google Scholar]
- Dai, J.; Hu, Y.; Liu, D.; Wei, J. Modelling and analysis of direct-driven permanent magnet synchronous generator wind turbine based on wind-rotor neural network model. Proc. Inst. Mech. Eng. Part A J. Power Energy 2012, 226, 62–72. [Google Scholar] [CrossRef]
- Dai, J.; Yang, W.; Cao, J.; Liu, D.; Long, X. Ageing assessment of a wind turbine over time by interpreting wind farm SCADA data. Renew. Energy 2018, 116, 199–208. [Google Scholar] [CrossRef] [Green Version]
- Lei, Y.G.; He, Z.J.; Zi, Y.Y. Fault Diagnosis Based on Novel Hybrid Intelligent Model. J. Mech. Eng. 2008, 44, 112–117. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Delgado, I.; Fahim, M. Wind turbine data analysis and LSTM-based prediction in SCADA system. Energies 2020, 14, 125. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhu, C.; Tan, J.; Wang, Y.; Tao, J. Operational state assessment of wind turbine gearbox based on long short-term memory networks and fuzzy synthesis. Renew. Energy 2022, 181, 1167–1176. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| State Evaluation Parameters | Active Power | Gearbox High-Speed Bearing Temperature | Gearbox Low-Speed Bearing Temperature | Gearbox Oil Temperature | Generator Drive-End Bearing Temperature | Generator Non-Drive-End Bearing Temperature | |
|---|---|---|---|---|---|---|---|
| SCADA Feature Parameters | |||||||
| Root Mean Square | 0.831 | 0.657 | 0.680 | 0.548 | 0.686 | 0.536 | |
| Peak-To-Peak Value | 0.842 | 0.706 | 0.750 | 0.643 | 0.748 | 0.634 | |
| Form Factor | 0.867 | 0.716 | 0.761 | 0.688 | 0.732 | 0.689 | |
| Pulse Factor | 0.646 | 0.640 | 0.633 | 0.628 | 0.628 | 0.627 | |
| Margin Factor | 0.595 | 0.586 | 0.582 | 0.566 | 0.572 | 0.562 | |
| Cliffness Factor | 0.471 | 0.357 | 0.361 | 0.309 | 0.365 | 0.352 | |
| Kurtosis Factor | 0.480 | 0.289 | 0.347 | 0.221 | 0.329 | 0.284 | |
| Signal Energy | 0.830 | 0.657 | 0.680 | 0.548 | 0.686 | 0.536 | |
| Skewness | 0.281 | 0.310 | 0.290 | 0.260 | 0.330 | 0.270 | |
| Gravity of Frequency | 0.762 | 0.518 | 0.548 | 0.645 | 0.582 | 0.585 | |
| Average amplitude | 0.910 | 0.736 | 0.807 | 0.611 | 0.761 | 0.640 | |
| Standard Deviation of Frequency | 0.800 | 0.631 | 0.668 | 0.520 | 0.661 | 0.574 | |
| Root Mean Square of Frequency | 0.720 | 0.673 | 0.639 | 0.536 | 0.657 | 0.562 | |
| Feature Name | Formula | Feature Name | Formula |
|---|---|---|---|
| Root Mean Square | Signal Energy | ||
| Peak-To-Peak Value | Gravity of Frequency | ||
| Form Factor | Average amplitude | ||
| Pulse Factor | Standard Deviation of Frequency | ||
| Margin Factor | Root Mean Square of Frequency |
| State Evaluation Parameters | Active Power | Gearbox High-Speed Bearing Temperature | Gearbox Low-Speed Bearing Temperature | Gearbox Oil Temperature | Generator Drive-End Bearing Temperature | Generator Non-Drive-End Bearing Temperature | |
|---|---|---|---|---|---|---|---|
| SCADA Feature Parameters | |||||||
| Average spindle rotation speed | 0.959 | 0.81 | 0.763 | 0.608 | 0.548 | 0.579 | |
| 30-s average wind speed | 0.928 | 0.716 | 0.76 | 0.61 | 0.587 | 0.65 | |
| Average value of torque feedback | 0.882 | 0.727 | 0.772 | 0.604 | 0.539 | 0.569 | |
| Average value of V-phase winding temperature of generators | 0.788 | 0.749 | 0.762 | 0.653 | 0.642 | 0.638 | |
| Average value of W-phase winding temperature of generators | 0.781 | 0.742 | 0.76 | 0.651 | 0.643 | 0.632 | |
| Average value of U-phase winding temperature of generators | 0.758 | 0.716 | 0.732 | 0.623 | 0.644 | 0.621 | |
| Average value of generator speed | 0.939 | 0.842 | 0.768 | 0.62 | 0.559 | 0.602 | |
| Average value of generator slip-ring temperature | 0.61 | 0.797 | 0.788 | 0.768 | 0.918 | 0.866 | |
| Average ambient temperature outside the cabin | 0.435 | 0.549 | 0.552 | 0.584 | 0.452 | 0.489 | |
| Average value of gearbox inlet temperature | 0.606 | 0.84 | 0.84 | 0.88 | 0.632 | 0.731 | |
| Average gearbox oil pressure | 0.874 | 0.591 | 0.601 | 0.688 | 0.43 | 0.47 | |
| ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | |
| Symbols | Parameter Name | Unit | Symbols | Parameter Name | Unit |
|---|---|---|---|---|---|
| Average spindle rotation speed | Gearbox low-speed bearing temperature | ||||
| Average value of generator speed | Average value of gearbox inlet temperature | ||||
| 30-s average wind speed | Average value of generator slip-ring temperature | ||||
| Active power | Average value of U-phase winding temperature of generators | ||||
| Generator drive-end bearing temperature | Average value of V-phase winding temperature of generators | ||||
| Generator non-drive-end bearing temperature | Average value of W-phase winding temperature of generators | ||||
| Gearbox oil temperature | Average value of torque feedback | ||||
| Gearbox high-speed bearing temperature | Average gearbox oil pressure |
| Hyperparameters | Values |
|---|---|
| Hidden layers | 3 |
| Time step | 20 |
| Iteration cycle | 500 |
| Batch size | 64 |
| Loss function | MSE |
| Optimizer | Adam |
| Learning rate | 0.005 |
| Dropout setting value | 0.25 |
| State evaluation Parameters | Weights |
|---|---|
| Active power | 0.290 |
| Generator drive-end bearing temperature | 0.149 |
| Generator non-drive-end bearing temperature | 0.134 |
| Gearbox oil temperature | 0.077 |
| Gearbox low-speed bearing temperature | 0.177 |
| Gearbox high-speed bearing temperature | 0.173 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, H.; Chen, J.; Dai, J.; Tao, H.; Wang, X. Early Fault Warning Method of Wind Turbine Main Transmission System Based on SCADA and CMS Data. Machines 2022, 10, 1018. https://doi.org/10.3390/machines10111018
Chen H, Chen J, Dai J, Tao H, Wang X. Early Fault Warning Method of Wind Turbine Main Transmission System Based on SCADA and CMS Data. Machines. 2022; 10(11):1018. https://doi.org/10.3390/machines10111018
Chicago/Turabian StyleChen, Huanguo, Jie Chen, Juchuan Dai, Hanyu Tao, and Xutao Wang. 2022. "Early Fault Warning Method of Wind Turbine Main Transmission System Based on SCADA and CMS Data" Machines 10, no. 11: 1018. https://doi.org/10.3390/machines10111018