Visual-Servoing Based Global Path Planning Using Interval Type-2 Fuzzy Logic Control




Abstract
:1. Introduction
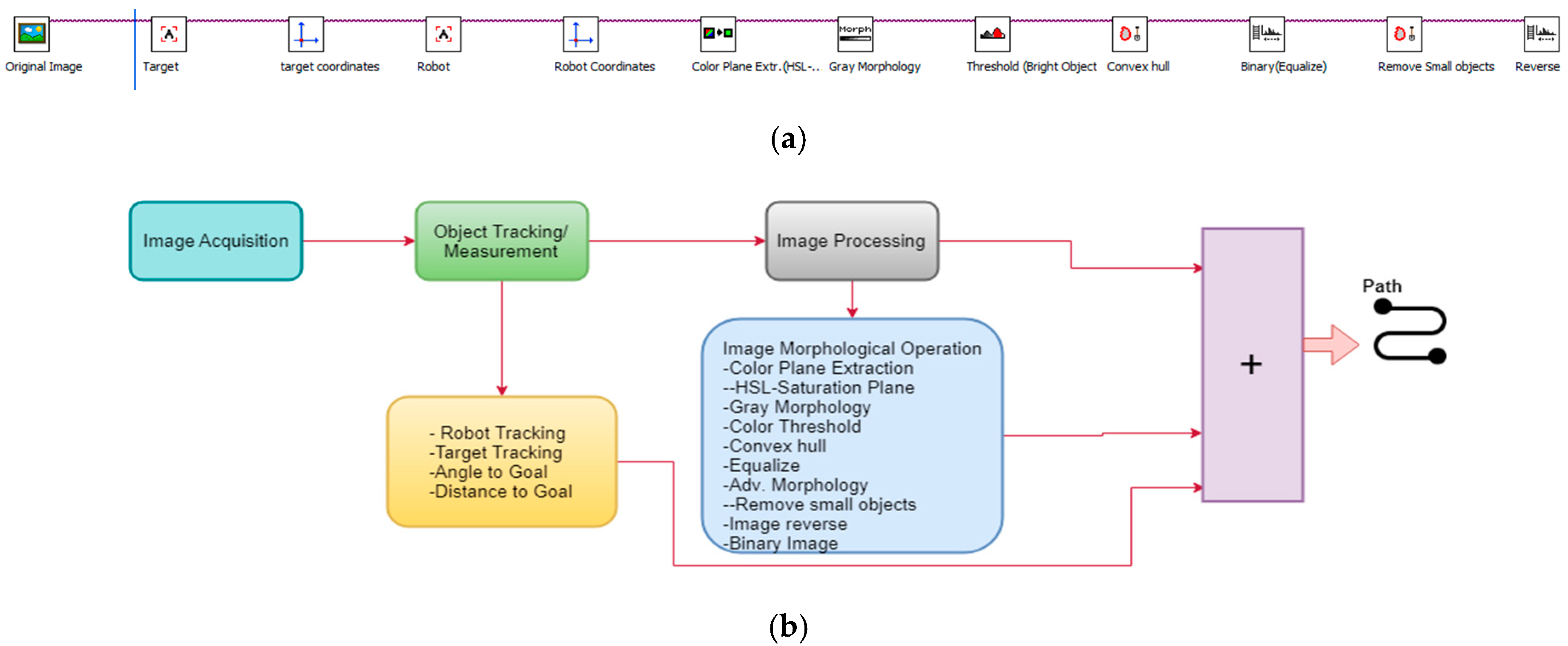
- A robust vision-based obstacle-free path planning algorithm has been developed and implemented to enable safer global navigation.
- A new framework for the evolutionary algorithm is given.
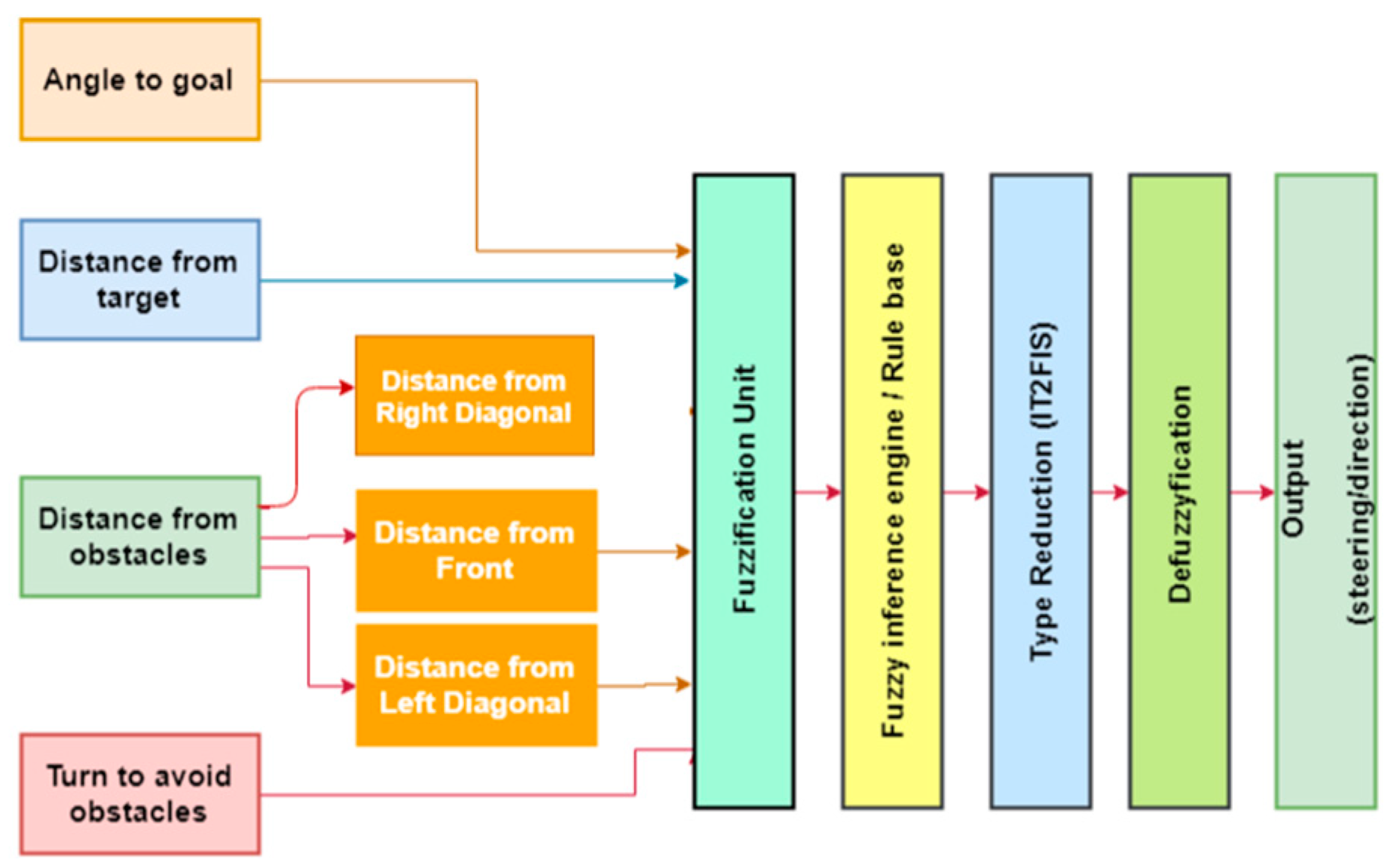
- A fuzzy inference system has been proposed and integrated into the proposed intelligent navigation framework to adjust the wheel velocity.
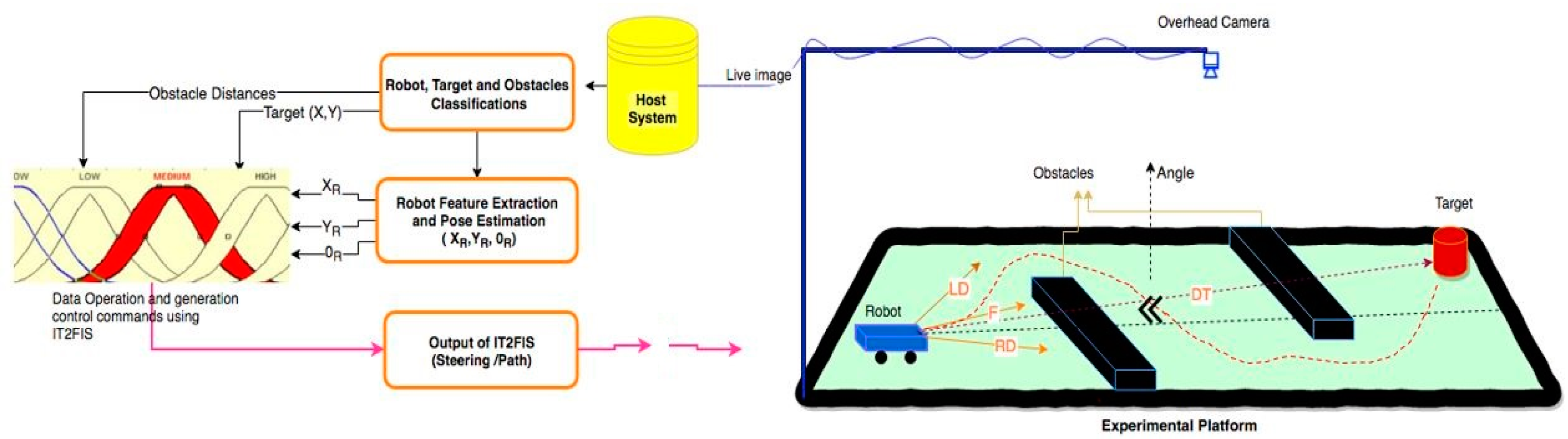
- A novel distance estimation method using overhead camera systems is given which employs scale parameters from the IT2FIS algorithm.
- Finally, we combine the advantages of the traditional path planning algorithm with the proposed technique to improve computational efficiency.
2. Literature Review
3. Concepts of the Proposed Method
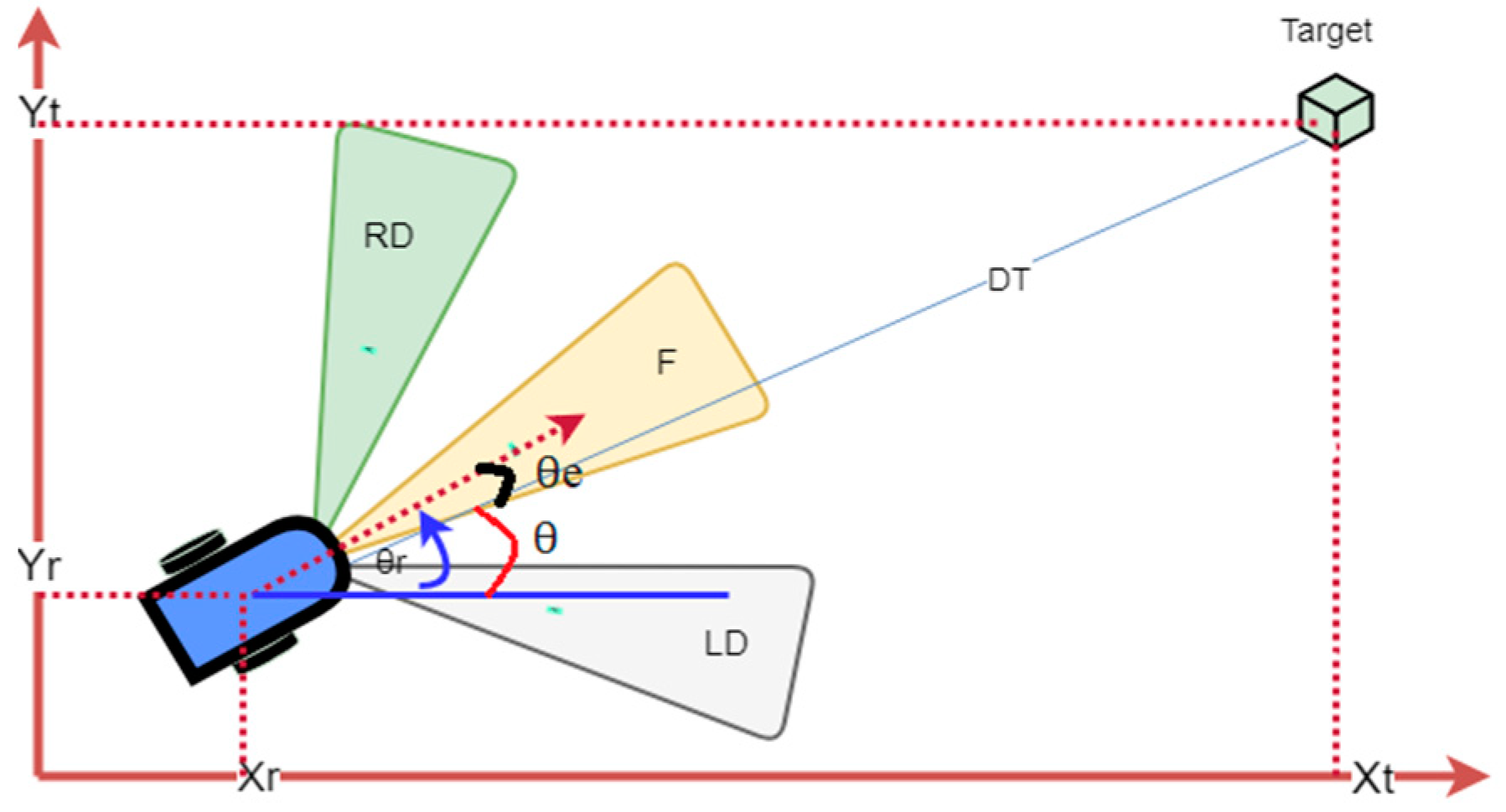
4. Problem Definition
5. Visual Servoing Algorithm
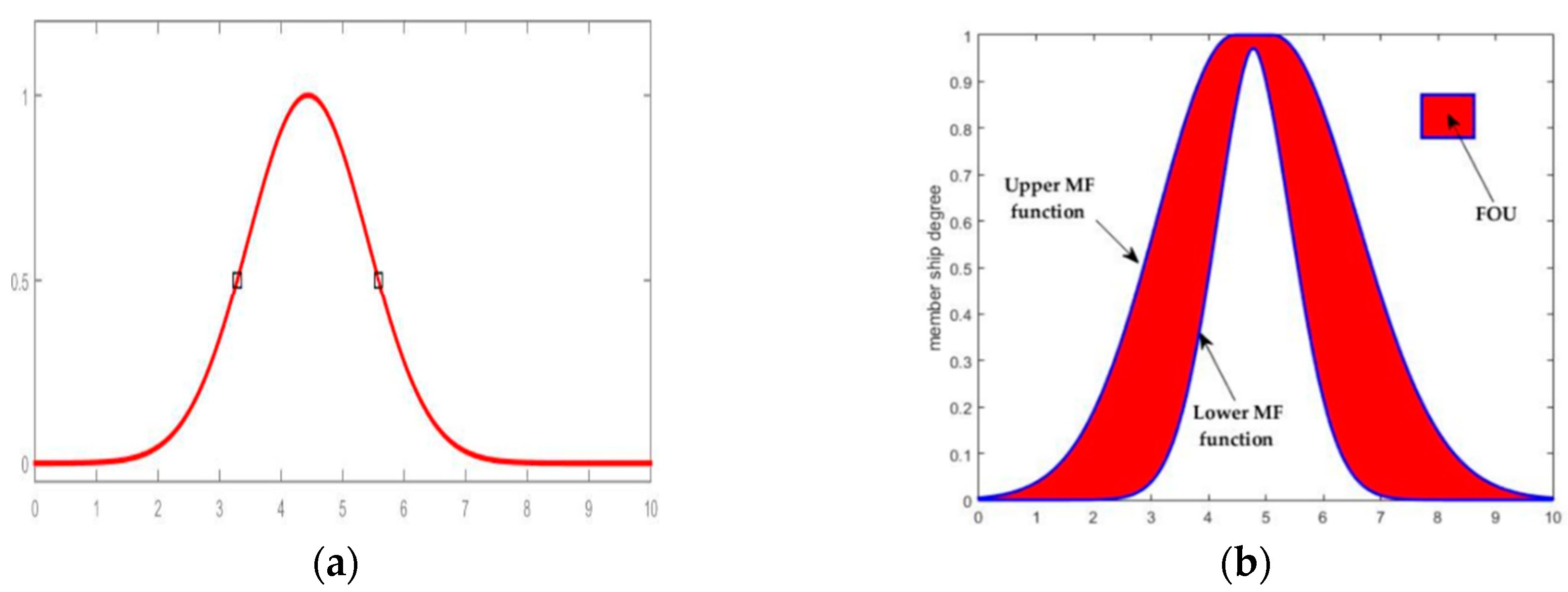
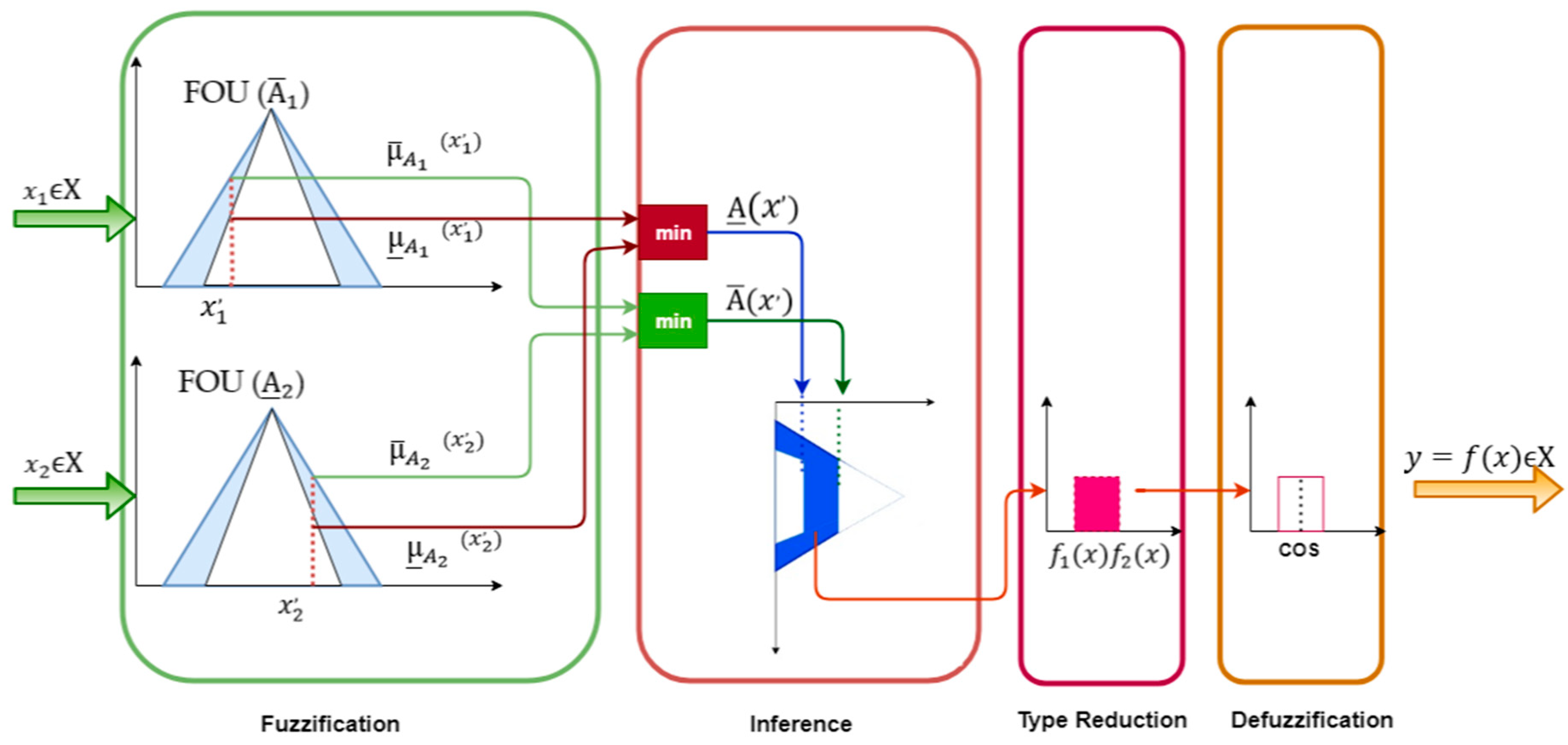
6. Interval Type-2 Fuzzy Logic System
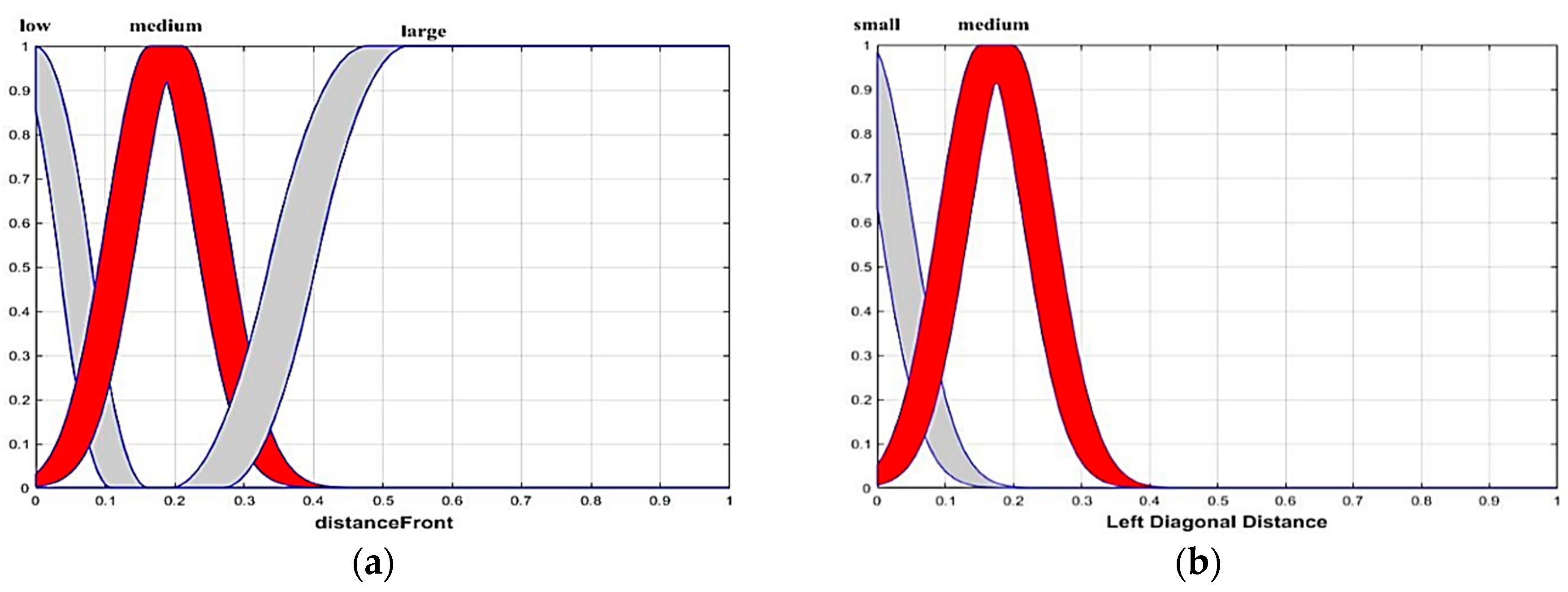
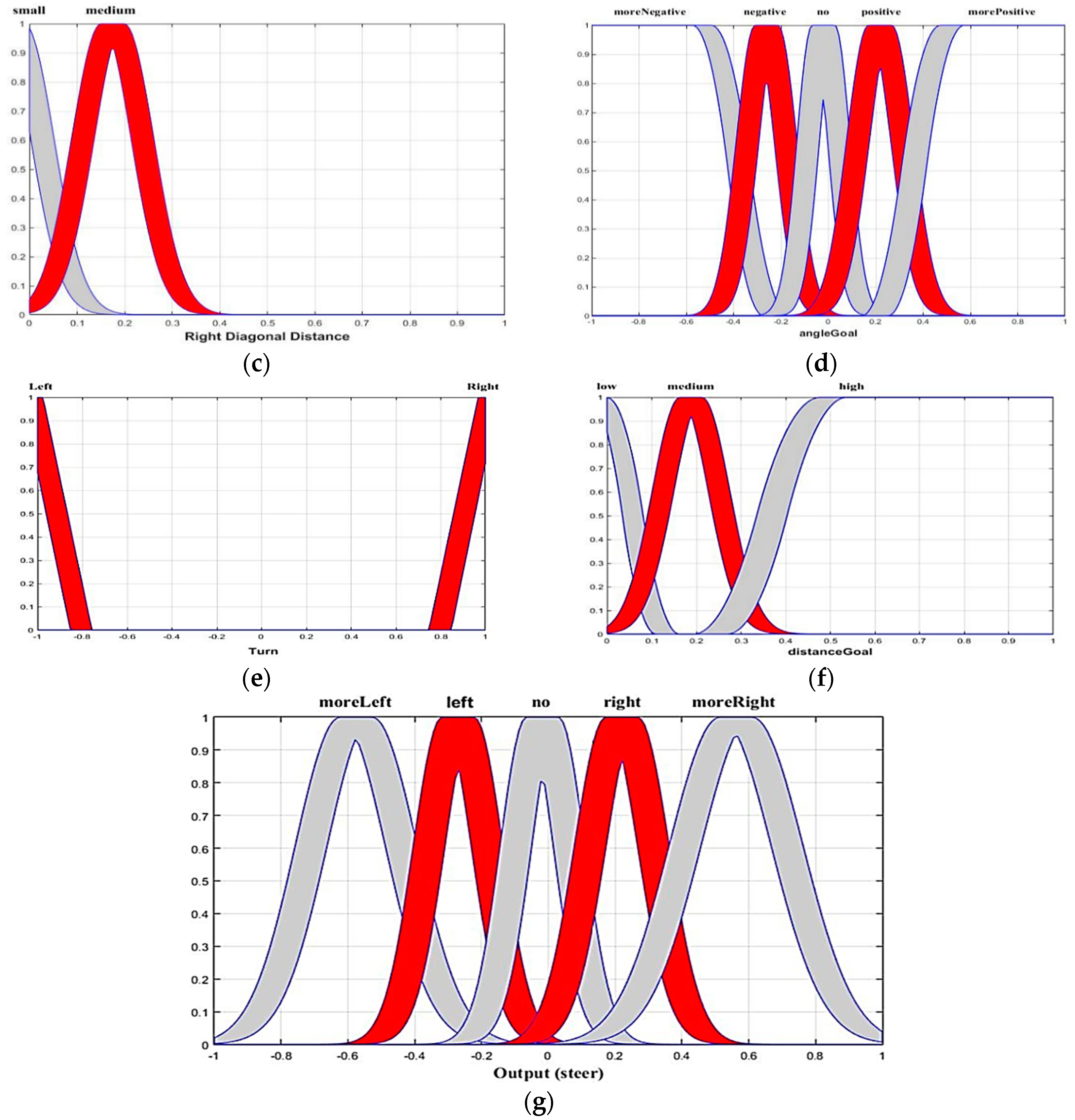
6.1. Fuzzifier
6.2. Fuzzy Inference Engine
6.3. Type Reducer
6.4. Defuzzifier
7. Experimental Result
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Siegwart, R.; Nourbakhsh, I.R.; Scaramuzza, D.; Arkin, R.C. Introduction to Autonomous Mobile Robots; MIT Press: Cambridge, MA, USA, 2011. [Google Scholar]
- Torshizi, A.D.; Hossein, M.; Zarandi, F.; Zakeri, H. On type-reduction of type-2 fuzzy sets: A review. Appl. Soft Comput. 2015, 7, 614–627. [Google Scholar] [CrossRef]
- Sepúlveda, R.; Montiel, O.; Castillo, O.; Melin, P. Embedding a high speed interval type-2 fuzzy controller for a real plant into an FPGA. Appl. Soft Comput. 2011, 12, 988–998. [Google Scholar] [CrossRef]
- Mbede, J.B.; Melingui, A.; Zobo, B.E.; Merzouki, R.; Bouamama, B.O. zSlices based type-2 fuzzy motion control for autonomous robotino mobile robot. In Proceedings of the 2012 IEEE/ASME 8th IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications, Suzhou, China, 8–10 July 2012; pp. 63–68. [Google Scholar]
- Cortes-Rios, J.C.; Gomez-Ramirez, E.; Ortiz-De-La-Vega, H.A.; Castillo, O.; Melin, P. Optimal design of interval type 2 fuzzy controllers based on a simple tuning algorithm. Appl. Soft Comput. 2014, 23, 270–285. [Google Scholar] [CrossRef]
- Maldonado, Y.; Castillo, O.; Melin, P. Particle swarm optimization of interval type-2 fuzzy systems for FPGA applications. Appl. Soft Comput. 2013, 13, 496–508. [Google Scholar] [CrossRef]
- Castillo, O.; Melin, P.; Pedrycz, W. Design of interval type-2 fuzzy models through optimal granularity allocation. Appl. Soft Comput. 2011, 11, 5590–5601. [Google Scholar] [CrossRef]
- Castillo, O.; Melin, P. A review on the design and optimization of interval type-2 fuzzy controllers. Appl. Soft Comput. 2011, 12, 1267–1278. [Google Scholar] [CrossRef]
- Olivas, F.; Valdez, F.; Castillo, O.; Gonzalez, C.I.; Martinez, G.; Melin, P. Ant colony optimization with dynamic parameter adaptation based on interval type-2 fuzzy logic systems. Appl. Soft Comput. J. 2017, 53, 74–87. [Google Scholar] [CrossRef]
- Gonzalez, C.I.; Melin, P.; Castro, J.R.; Castillo, O.; Mendoza, O. Optimization of interval type-2 fuzzy systems for image edge detection. Appl. Soft Comput. 2016, 47, 631–643. [Google Scholar] [CrossRef]
- Liao, T.W. A procedure for the generation of interval type-2 membership functions from data. Appl. Soft Comput. J. 2017, 52, 925–936. [Google Scholar] [CrossRef]
- Ider, M. Type-2 fuzzy logic control for a mobile robot tracking a moving target. Med. J. Model. Simul. 2015, 3, 57–65. [Google Scholar]
- Lozano-Pérez, T.; Wesley, M.A. An algorithm for planning collision-free paths among polyhedral obstacles. Commun. ACM 1979, 22, 560–570. [Google Scholar] [CrossRef]
- Xue, Y.; Sun, J.-Q. Solving the Path Planning Problem in Mobile Robotics with the Multi-Objective Evolutionary Algorithm. Appl. Sci. 2018, 8, 1425. [Google Scholar] [CrossRef]
- Pamučar, D.; Ljubojević, S.; Kostadinović, D.; Đorović, B. Cost and risk aggregation in multi-objective route planning for hazardous materials transportation—A neuro-fuzzy and artificial bee colony approach. Expert Syst. Appl. 2016, 65, 1–15. [Google Scholar] [CrossRef]
- Pamucar, D.; Cirovic, G. Vehicle Route Selection with an Adaptive Neuro Fuzzy Inference System in Uncertainty Conditions. Decis. Mak. Appl. Manag. Eng. 2018, 1, 13–37. [Google Scholar] [CrossRef]
- Pamučar, D.; Vasin, L.; Atanasković, P.; Miličić, M. Planning the City Logistics Terminal Location by Applying the Green p -Median Model and Type-2 Neurofuzzy Network. Comput. Intell. Neurosci. 2016, 2016, 1–15. [Google Scholar] [CrossRef]
- Ng, K.C.; Trivedi, M.M. A neuro-fuzzy controller for mobile robot navigation and multirobot convoying. IEEE Trans. Syst. Man Cybern. Part B Cybern. 1998, 28, 829–840. [Google Scholar] [CrossRef] [Green Version]
- Bakdi, A.; Hentout, A.; Boutami, H.; Maoudj, A.; Hachour, O.; Bouzouia, B. Optimal path planning and execution for mobile robots using genetic algorithm and adaptive fuzzy-logic control. Rob. Auton. Syst. 2017, 89, 95–109. [Google Scholar] [CrossRef]
- Kala, R.; Shukla, A.; Tiwari, R. Fusion of probabilistic A* algorithm and fuzzy inference system for robotic path planning. Artif. Intell. Rev. 2010, 33, 307–327. [Google Scholar] [CrossRef]
- Duchoň, F.; Babinec, A.; Kajan, M.; Beňo, P.; Florek, M.; Fico, T.; Jurišica, L. Path planning with modified A star algorithm for a mobile robot. Procedia Eng. 2014, 96, 59–69. [Google Scholar] [CrossRef]
- Stentz, A. Optimal and Efficient Path Planning for Partially Known Environments. In Intelligent Unmanned Ground Vehicles; Springer: Boston, MA, USA, 1997; pp. 203–220. [Google Scholar] [Green Version]
- Al-Taharwa, I.; Sheta, A.; Al-Weshah, M. A mobile robot path planning using genetic algorithm in static environment. J. Comput. Sci. 2008, 4, 341–344. [Google Scholar] [CrossRef]
- Hu, Y.; Yang, S.X. A knowledge based genetic algorithm for path planning of a mobile robot. In Proceedings of the IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004. [Google Scholar]
- Yüksel, T.; Sezgin, A. An Implementation of Path Planning Algorithms for Mobile Robots on A Grid Based Map. In Proceedings of the 4th International Conference on Electrical and Electronics Engineering (ELECO 2005), Bursa, Turkey, 7–11 December 2005. [Google Scholar]
- Lee, C.Y. An Algorithm for Path Connections and Its Applications. IRE Trans. Electron. Comput. 1961, 3, 346–365. [Google Scholar] [CrossRef]
- Anderson, J.B.; Mohan, S. Sequential Coding Algorithms: A Survey and Cost Analysis. IEEE Trans. Commun. 1984, 32, 169–176. [Google Scholar] [CrossRef]
- Rimon, E.; Koditschek, D.E. Exact Robot Navigation using Artificial Potential Functions. IEEE Trans. Robot. Autom. 1992, 8, 501–508. [Google Scholar] [CrossRef]
- Montiel, O.; Orozco-Rosas, U.; Sepúlveda, R. Path planning for mobile robots using Bacterial Potential Field for avoiding static and dynamic obstacles. Expert Syst. Appl. 2015, 42, 5177–5191. [Google Scholar] [CrossRef]
- Dönmez, E.; Kocamaz, A.F.; Dirik, M. Bi-RRT path extraction and curve fitting smooth with visual based configuration space mapping. In Proceedings of the 2017 International Artificial Intelligence and Data Processing Symposium (IDAP), Malatya, Turkey, 16–17 September 2017; pp. 1–5. [Google Scholar]
- LaValle, S.M.; Kuffner, J.J. Randomized kinodynamic planning. Int. J. Rob. Res. 2001, 20, 378–400. [Google Scholar] [CrossRef]
- Chandak, A.; Gosavi, K.; Giri, S.; Agrawal, S.; Kulkarni, P. Path Planning for Mobile Robot Navigation using Image Processing. Int. J. Sci. Eng. Res. 2013, 4, 1490–1496. [Google Scholar]
- Ziaei, Z.; Oftadeh, R.; Mattila, J. Vision-based path coordination for multiple mobile robots with four steering wheels using an overhead camera. In Proceedings of the IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Busan, South Korea, 7–11 July 2015; pp. 261–268. [Google Scholar]
- Elsheikh, E.A.; El-Bardini, M.A.; Fkirin, M.A. Dynamic path planning and decentralized FLC path following implementation for WMR based on visual servoing. In Proceedings of the 3rd MEC International Conference on Big Data and Smart City (ICBDSC), Muscat, Oman, 15–16 March 2016; pp. 148–154. [Google Scholar]
- Ziaei, Z.; Oftadeh, R.; Mattila, J. Global path planning with obstacle avoidance for omnidirectional mobile robot using overhead camera. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Tianjin, China, 3–6 August 2014; pp. 697–704. [Google Scholar]
- Chen, C.H.L.; Lee, M.F.R. Global path planning in mobile robot using omnidirectional camera. In Proceedings of the International Conference on Consumer Electronics, Communications and Networks (CECNet), Xianning, China, 16–18 April 2011; pp. 4986–4989. [Google Scholar]
- Dönmez, E.; Kocamaz, A.F.; Dirik, M. A Vision-Based Real-Time Mobile Robot Controller Design Based on Gaussian Function for Indoor Environment. Arab. J. Sci. Eng. 2017, 43, 7127–7142. [Google Scholar] [CrossRef]
- Astudillo, L.; Melin, P.; Castillo, O. Optimization of type-2 and type-1 fuzzy tracking controllers for an autonomous mobile robot under perturbed torques by means of a chemical optimization paradigm. In Studies in Fuzziness and Soft Computing; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Nurmaini, S.; Zaiton, S.; Norhayati, D. An embedded interval type-2 neuro-fuzzy controller for mobile robot navigation. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics, San Antonio, TX, USA, 11–14 October 2009. [Google Scholar]
- Elsheikh, E.A.; Fkirin, M.A. Practical path planning and path following for a non- holonomic mobile robot based on visual servoing. In Proceedings of the IEEE Information Technology, Networking, Electronic and Automation Control Conference, Chongqing, China, 20–22 May 2016. [Google Scholar]
- Dirik, M.; Kocamaz, A.F.; Dönmez, E. Visual servoing based path planning for wheeled mobile robot in obstacle environments. In Proceedings of the International Artificial Intelligence and Data Processing Symposium (IDAP), Malatya, Turkey, 16–17 September 2017. [Google Scholar]
- Omrane, H.; Masmoudi, M.S.; Masmoudi, M. Fuzzy Logic Based Control for Autonomous Mobile. Comput. Intell. Neurosci. 2016, 2016, 1–10. [Google Scholar] [CrossRef]
- Pandey, K.K.; Mohanty, P.K.; Parhi, D.R. Real time navigation strategies for webots using fuzzy controller. In Proceedings of the IEEE 8th International Conference on Intelligent Systems and Control (ISCO), Coimbatore, India, 10–11 January 2014; pp. 10–16. [Google Scholar]
- Dirik, M.; Castillo, O.; Kocamaz, A.F. Gaze-Guided Control of an Autonomous Mobile Robot Using Type-2 Fuzzy Logic. Appl. Syst. Innov. 2019, 2, 14. [Google Scholar] [CrossRef]
- Garcia, M.A.P.; Montiel, O.; Castillo, O.; Sepúlveda, R.; Melin, P. Path planning for autonomous mobile robot navigation with ant colony optimization and fuzzy cost function evaluation. Appl. Soft Comput. 2009, 9, 1102–1110. [Google Scholar] [CrossRef]
- Lu, X.G.; Liu, M.; Liu, J.X. Design and Optimization of Interval Type-2 Fuzzy Logic Controller for Delta Parallel Robot Trajectory Control. Int. J. Fuzzy Syst. 2017, 19, 190–206. [Google Scholar] [CrossRef]
- Baklouti, N.; John, R.; Alimi, A. Interval Type-2 Fuzzy Logic Control of Mobile Robots. J. Intell. Learn. Syst. Appl. 2012, 4, 291–302. [Google Scholar] [CrossRef]
- Liang, Q.; Mendel, J. Interval Type-2 Fuzzy Logic Systems: Theory and Design. IEEE Trans. Fuzzy Syst. 2000, 8, 535–550. [Google Scholar] [CrossRef]
- Gaxiola, F.; Melin, P.; Valdez, F.; Castro, J.R.; Castillo, O. PSO with Dynamic Adaptation of Parameters for Optimization in Neural Networks with Interval Type-2 Fuzzy Numbers Weights. Axioms 2019, 8, 14. [Google Scholar] [CrossRef]
- Pamučar, D.; Atanasković, P.; Miličić, M. Modeling of fuzzy logic system for investment management in the railway infrastructure. Tehnicki Vjesnik/Technical Gazette 2015, 22. [Google Scholar] [CrossRef] [Green Version]
- Pamucar, D.; Bozanic, D.; Komazec, N. Risk Assessment of Natural Disasters Using Fuzzy Logic System of Type 2. Manag. J. Theory Pract. Manag. 2016, 21, 23–33. [Google Scholar]
- Guzmán, J.C.; Miramontes, I.; Melin, P.; Prado-Arechiga, G. Optimal Genetic Design of Type-1 and Interval Type-2 Fuzzy Systems for Blood Pressure Level Classification. Axioms 2019, 8, 8. [Google Scholar] [CrossRef]
- Martinez, R.; Castillo, O.; Aguilar, L.T. Optimization of interval type-2 fuzzy logic controllers for a perturbed autonomous wheeled mobile robot using genetic algorithms. Inf. Sci. 2009, 179, 2158–2174. [Google Scholar] [CrossRef]
- Castillo, O.; Amador-Angulo, L.; Castro, J.R.; Garcia-Valdez, M. A comparative study of type-1 fuzzy logic systems, interval type-2 fuzzy logic systems and generalized type-2 fuzzy logic systems in control problems. Inf. Sci. 2016, 354, 257–274. [Google Scholar] [CrossRef]
- Bernal, E.; Castillo, O.; Soria, J.; Valdez, F. Optimization of Fuzzy Controller Using Galactic Swarm Optimization with Type-2 Fuzzy Dynamic Parameter Adjustment. Axioms 2019, 8, 26. [Google Scholar] [CrossRef]
- Mendel, J.M. Advances in type-2 fuzzy sets and systems. Inf. Sci. 2007, 177, 84–110. [Google Scholar] [CrossRef]
- Mendel, J.M.; John, R.I.B. Type-2 fuzzy sets made simple. IEEE Trans. Fuzzy Syst. 2002, 10, 117–127. [Google Scholar] [CrossRef] [Green Version]
- Castillo, O.; Melin, P. Type-2 fuzzy logic systems. In Briefs in Applied Sciences and Technology; Springer: Berlin, Germany, 2012. [Google Scholar]
- Castillo, O.; Melin, P.; Kacprzyk, J.; Pedrycz, W. Type-2 Fuzzy Logic: Theory and Applications. In Proceedings of the EEE International Conference on Granular Computing (GRC 2007), Fremont, CA, USA, 2–4 November 2007; p. 145. [Google Scholar]
- Zadeh, L.A. A fuzzy -algorithmic approach to the definition of complex or imprecise concepts. Int. J. Man-Mach. Stud. 1976, 8, 249–291. [Google Scholar] [CrossRef]
- Zadeh, L.A. The concept of a linguistic variable and its application to approximate reasoning-III. Inf. Sci. 1975, 9, 43–80. [Google Scholar] [CrossRef]
- Castillo, O.; Melin, P. Hybrid intelligent systems for time series prediction using neural networks, fuzzy logic, and fractal theory. IEEE Trans. Neural Netw. 2002, 13, 1395–1408. [Google Scholar] [CrossRef]
- Karnik, N.N.; Mendel, J.M. Centroid of a type-2 fuzzy set. Inf. Sci. 2001, 132, 195–220. [Google Scholar] [CrossRef]
- Mendel, J.M.; John, R.I.; Liu, F. Interval Type-2 Fuzzy Logic Systems Made Simple. IEEE Trans. Fuzzy Syst. 2006, 14, 808–821. [Google Scholar] [CrossRef] [Green Version]
- Karnik, N.N.; Mendel, J.M.; Liang, Q. Type-2 Fuzzy Logic Systems. IEEE Trans. FUZZY Syst. 1999, 7, 16. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Inputs | Output | ||||||
|---|---|---|---|---|---|---|---|
| LD | F | RD | AG | Turn | DT | Direction | |
| 1 | low | left | moreLeft | ||||
| 2 | medium | left | left | ||||
| 3 | large | left | left | ||||
| 4 | low | right | moreRight | ||||
| 5 | medium | right | right | ||||
| 6 | large | right | right | ||||
| 7 | small | moreRight | |||||
| 8 | medium | right | |||||
| 9 | small | moreLeft | |||||
| 10 | medium | left | |||||
| 11 | negative | low | moreLeft | ||||
| 12 | moreNegative | low | moreLeft | ||||
| 13 | no | low | no | ||||
| 14 | positive | low | moreRight | ||||
| 15 | morePositive | low | moreRight | ||||
| 16 | negative | medium | left | ||||
| 17 | no | medium | no | ||||
| 18 | positive | medium | right | ||||
| 19 | morePositive | medium | moreRight | ||||
| 20 | moreNegative | high | left | ||||
| 21 | negative | high | left | ||||
| 22 | no | high | no | ||||
| 23 | positive | high | right | ||||
| 24 | morePositive | high | right | ||||
| 25 | moreNegative | medium | moreLeft | ||||
| Path Planning Algoriths. | Initial Position | Target Position | Path Length | Proces. Time (s) |
|---|---|---|---|---|
| Type-2 FIS (IT2FIS) | [Xr,Yr] = [470, 900] | [Tx,Ty] = [550, 120] | 1245 | 1.8070 |
| Type-1 FIS | [Xr,Yr] = [470, 900] | [Tx,Ty] = [550, 120] | 1415 | 1.5781 |
| APF | [Xr,Yr] = [470, 900] | [Tx,Ty] = [550, 120] | 1437 | 1.6201 |
| RRT | [Xr,Yr] = [470, 900] | [Tx,Ty] = [550, 120] | 1387 | 1.3700 |
| GA | [Xr,Yr] = [470, 900] | [Tx,Ty] = [550, 120] | 1676 | 1.5399 |
| PRM | [Xr,Yr] = [470, 900] | [Tx,Ty] = [550, 120] | 1246 | 2.3793 |
| BRRT | [Xr,Yr] = [470, 900] | [Tx,Ty] = [550, 120] | 1448 | 2.6620 |
| A Star | [Xr,Yr] = [470, 900] | [Tx,Ty] = [550, 120] | 1212 | 1.832 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dirik, M.; Castillo, O.; Kocamaz, A.F. Visual-Servoing Based Global Path Planning Using Interval Type-2 Fuzzy Logic Control. Axioms 2019, 8, 58. https://doi.org/10.3390/axioms8020058
Dirik M, Castillo O, Kocamaz AF. Visual-Servoing Based Global Path Planning Using Interval Type-2 Fuzzy Logic Control. Axioms. 2019; 8(2):58. https://doi.org/10.3390/axioms8020058
Chicago/Turabian StyleDirik, Mahmut, Oscar Castillo, and Adnan Fatih Kocamaz. 2019. "Visual-Servoing Based Global Path Planning Using Interval Type-2 Fuzzy Logic Control" Axioms 8, no. 2: 58. https://doi.org/10.3390/axioms8020058