
NHF as an Edge Detector of Potential Field Data and Its Application in the Yili Basin

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Normalized Harris Filter
2.1. The Harris Filter
2.2. Amplitude Balance
- (i)
- Pick out the local maxima of R
- (ii)
- Threshold of the local maxima
- (iii)
- Calculate the upper envelope surface of the R
- (iv)
- Normalize R using upper envelope surface
3. Synthetic Data
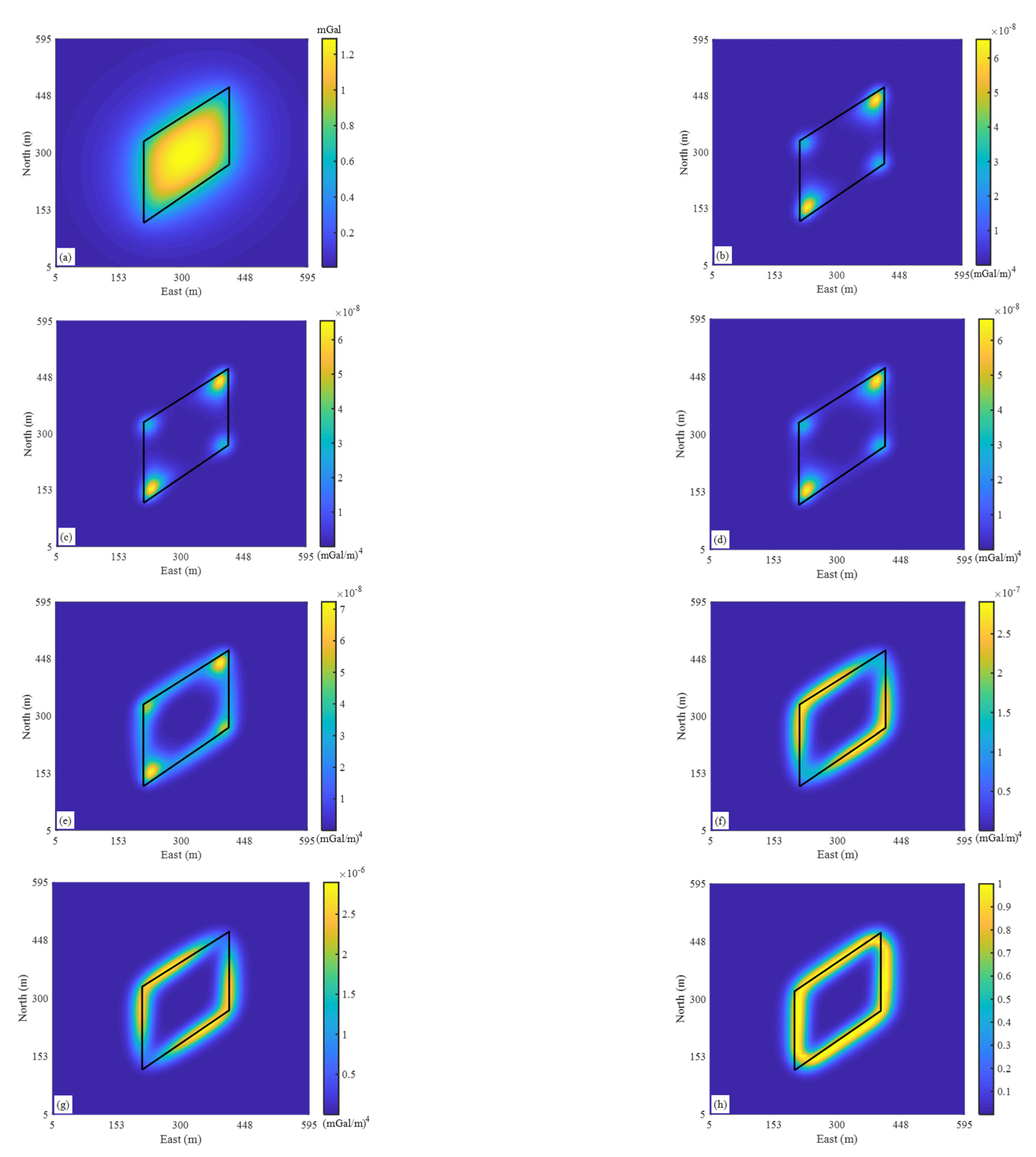
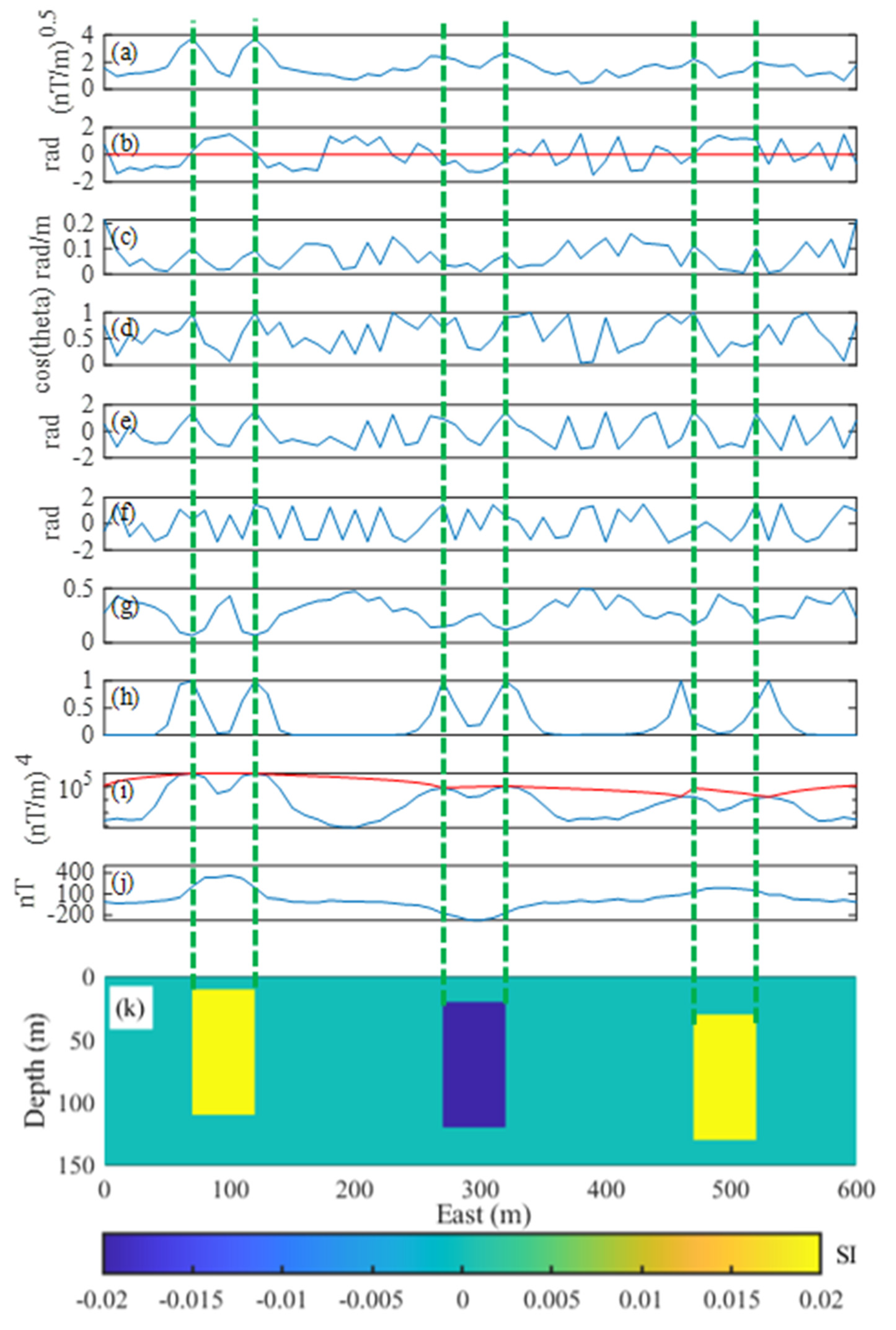
3.1. The Single Parallelepiped
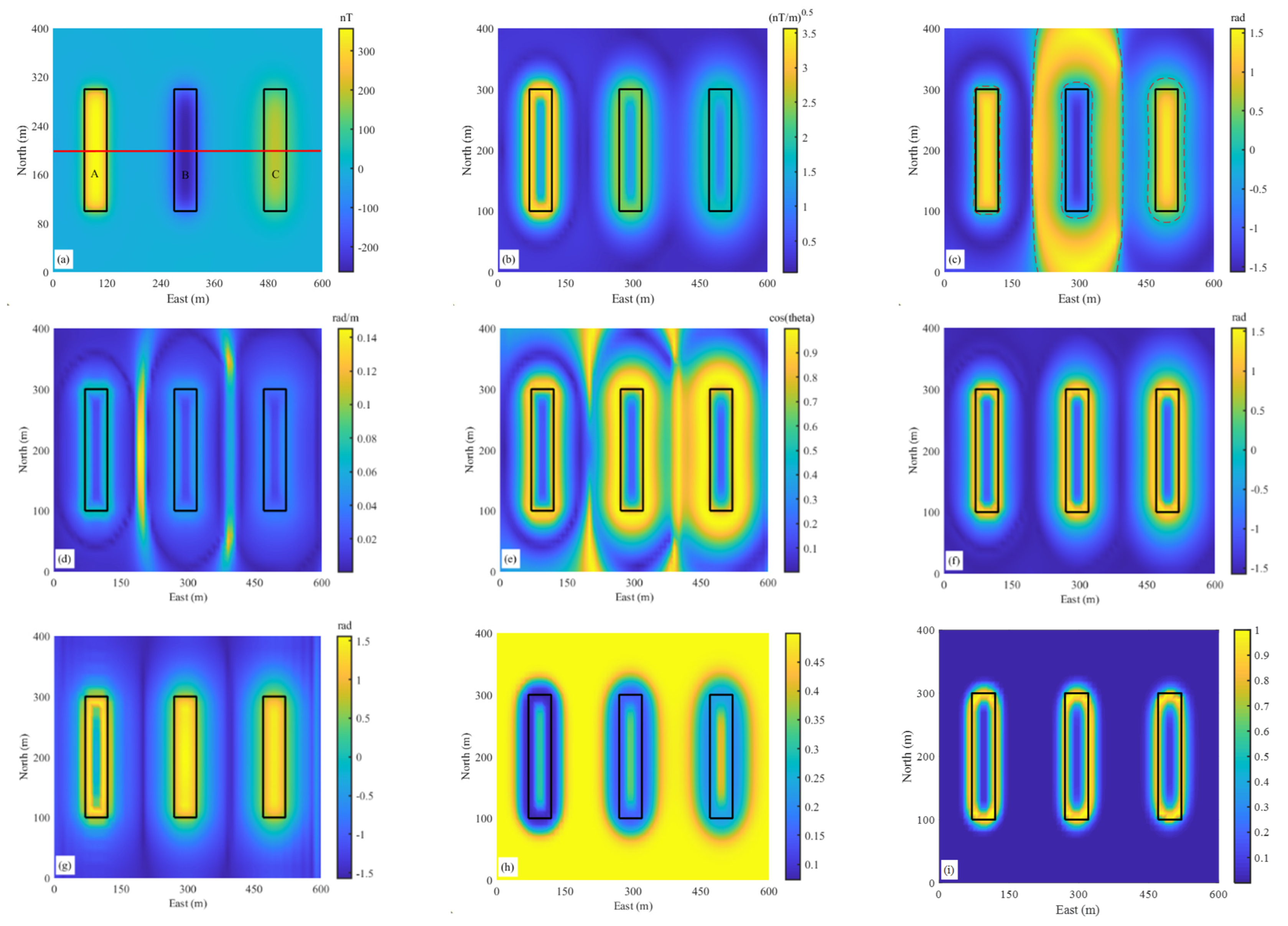
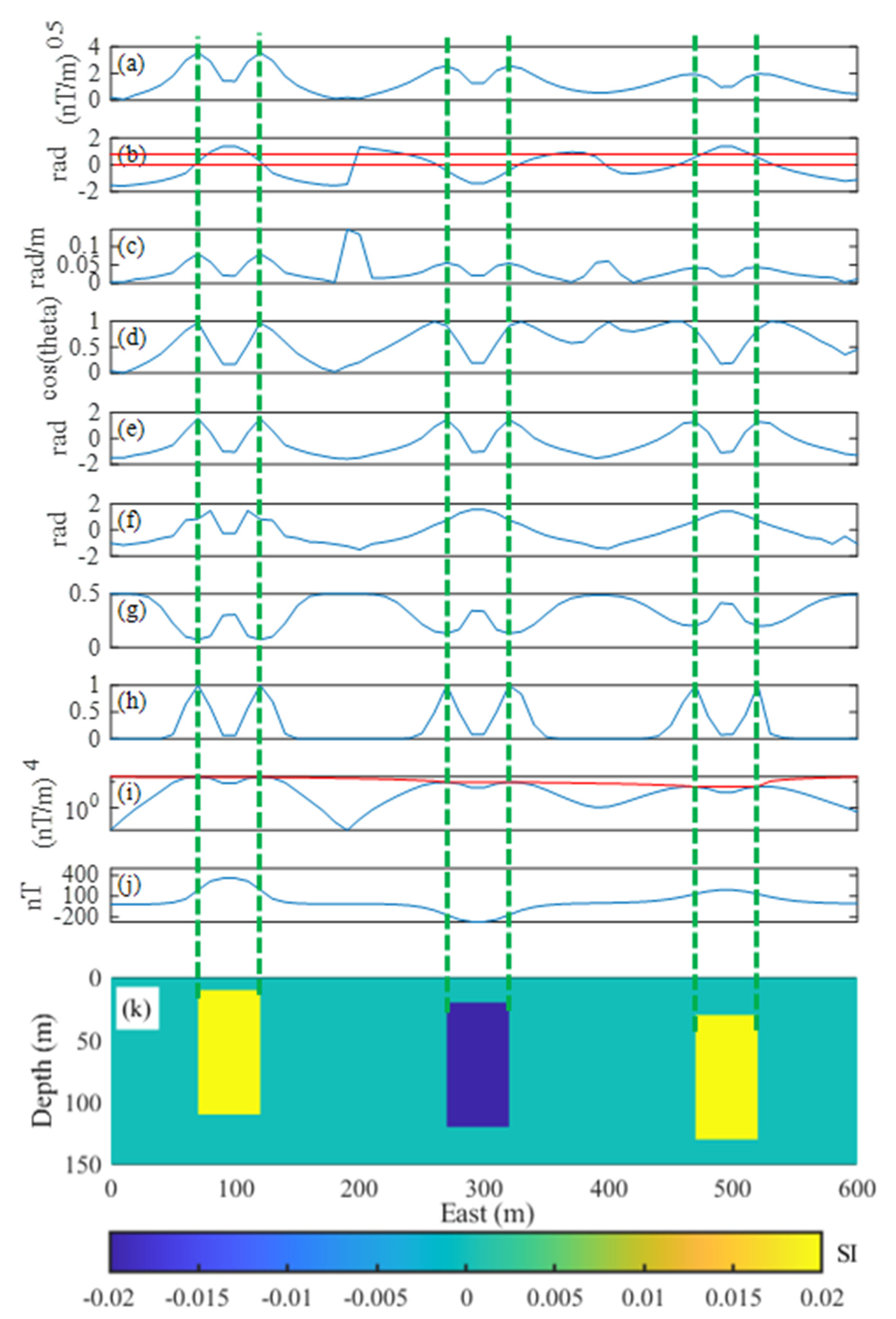
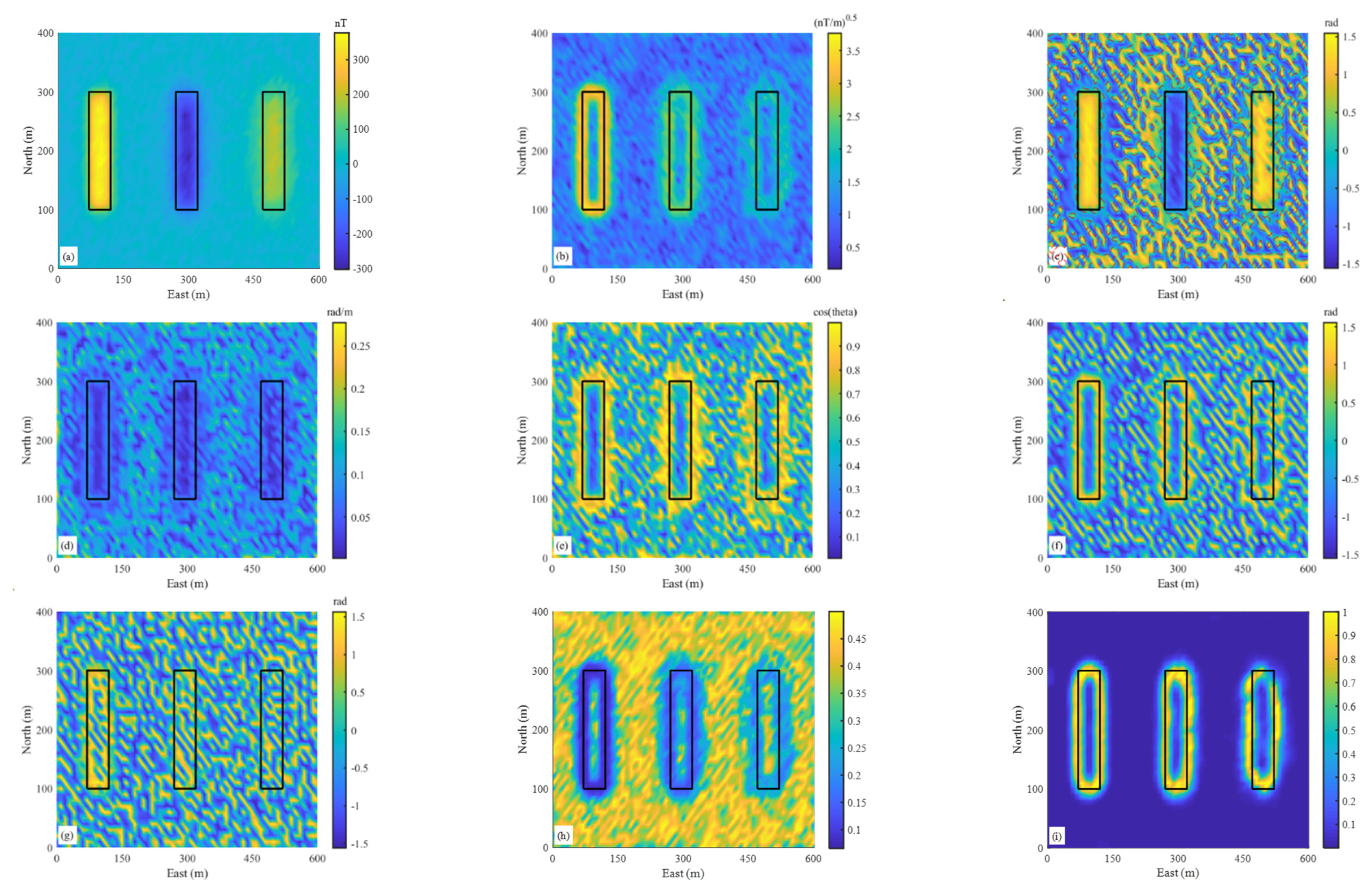
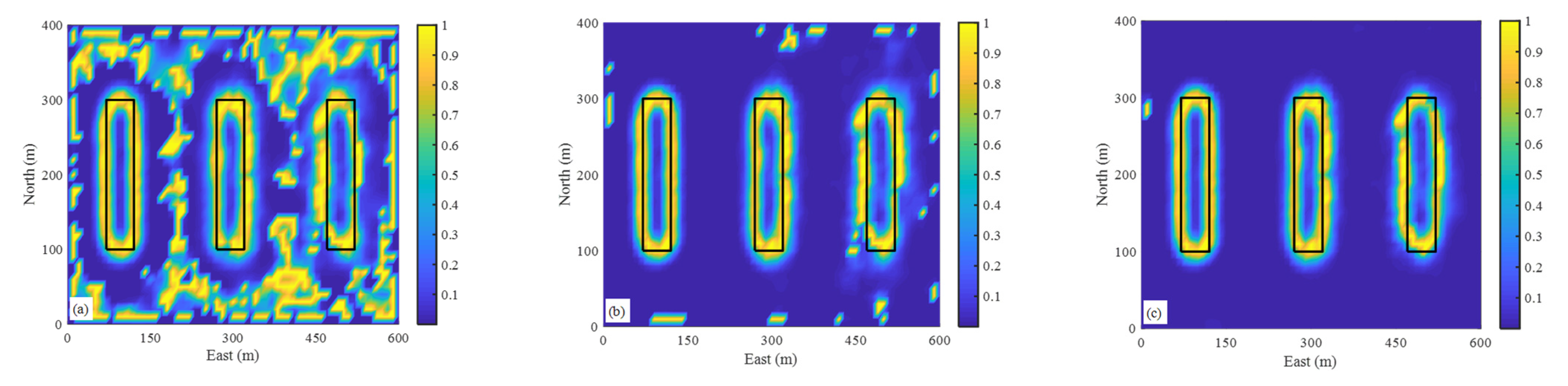
3.2. Three Prisms
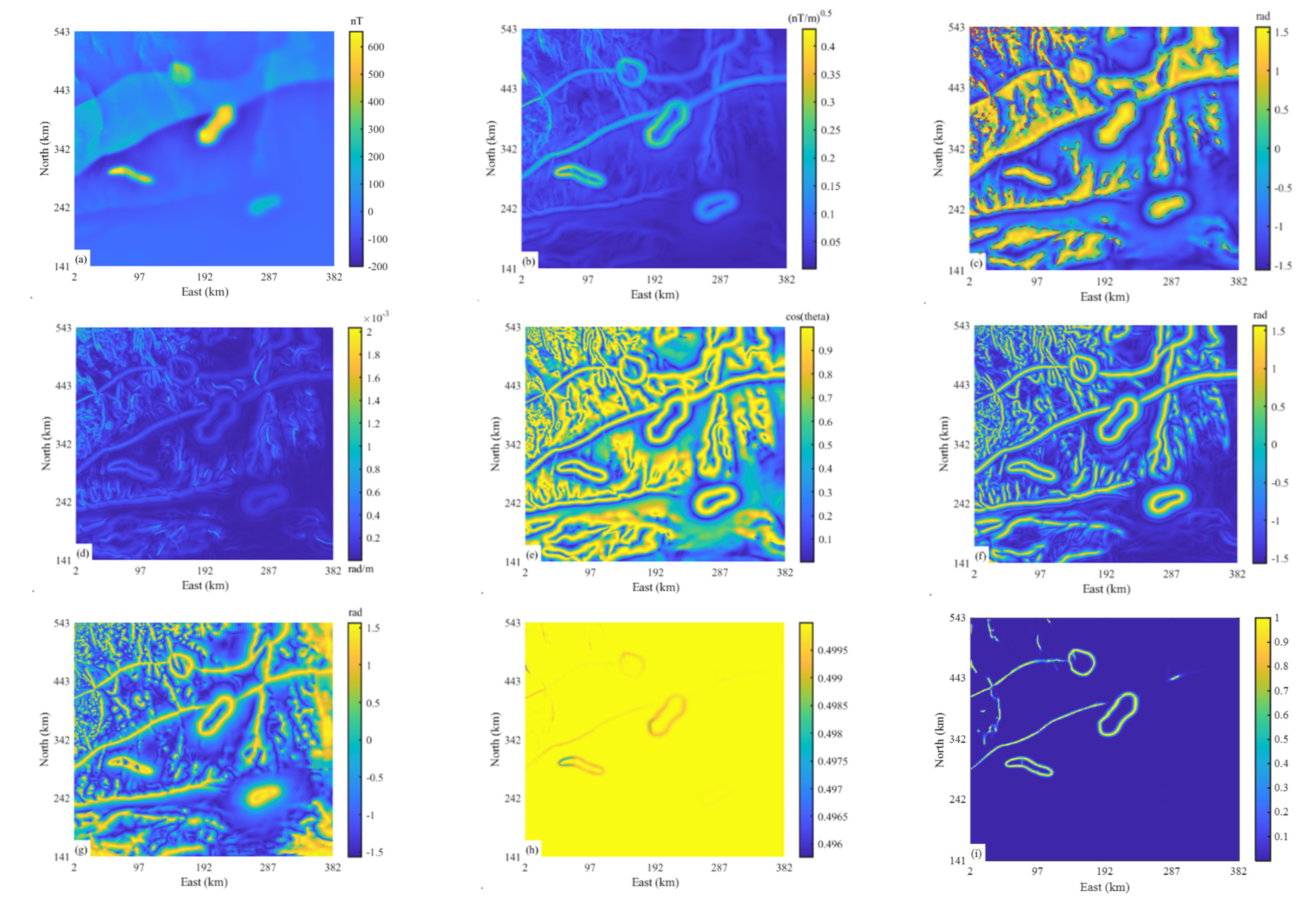
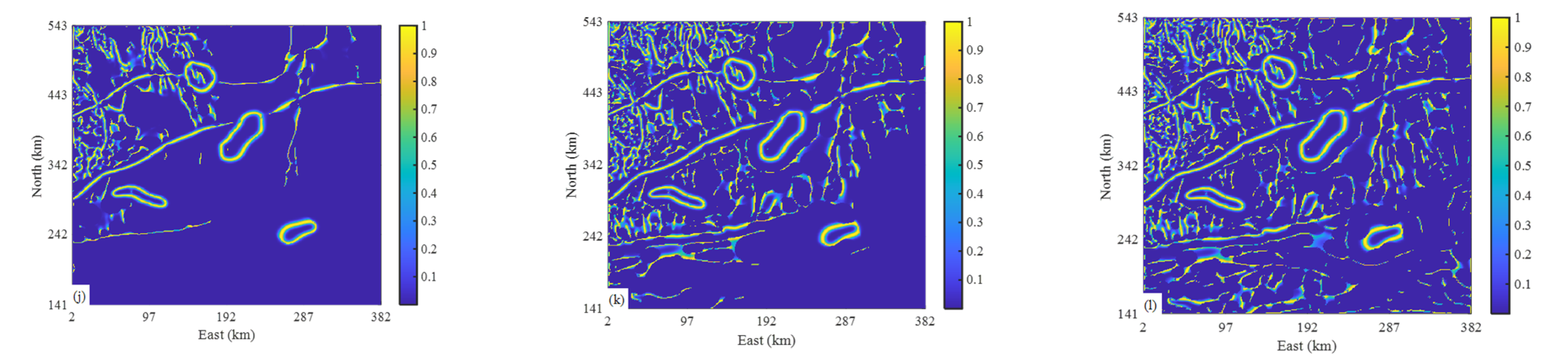
3.3. The Bishop Model
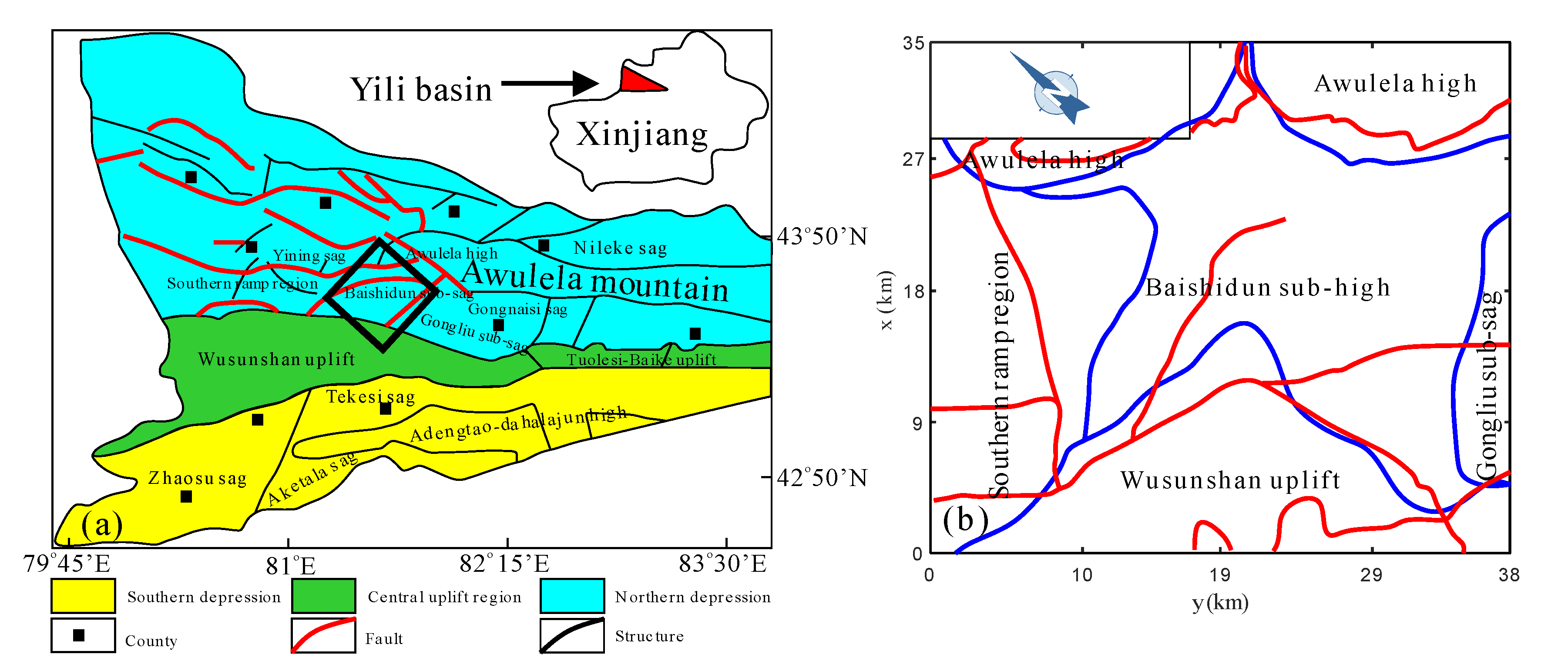
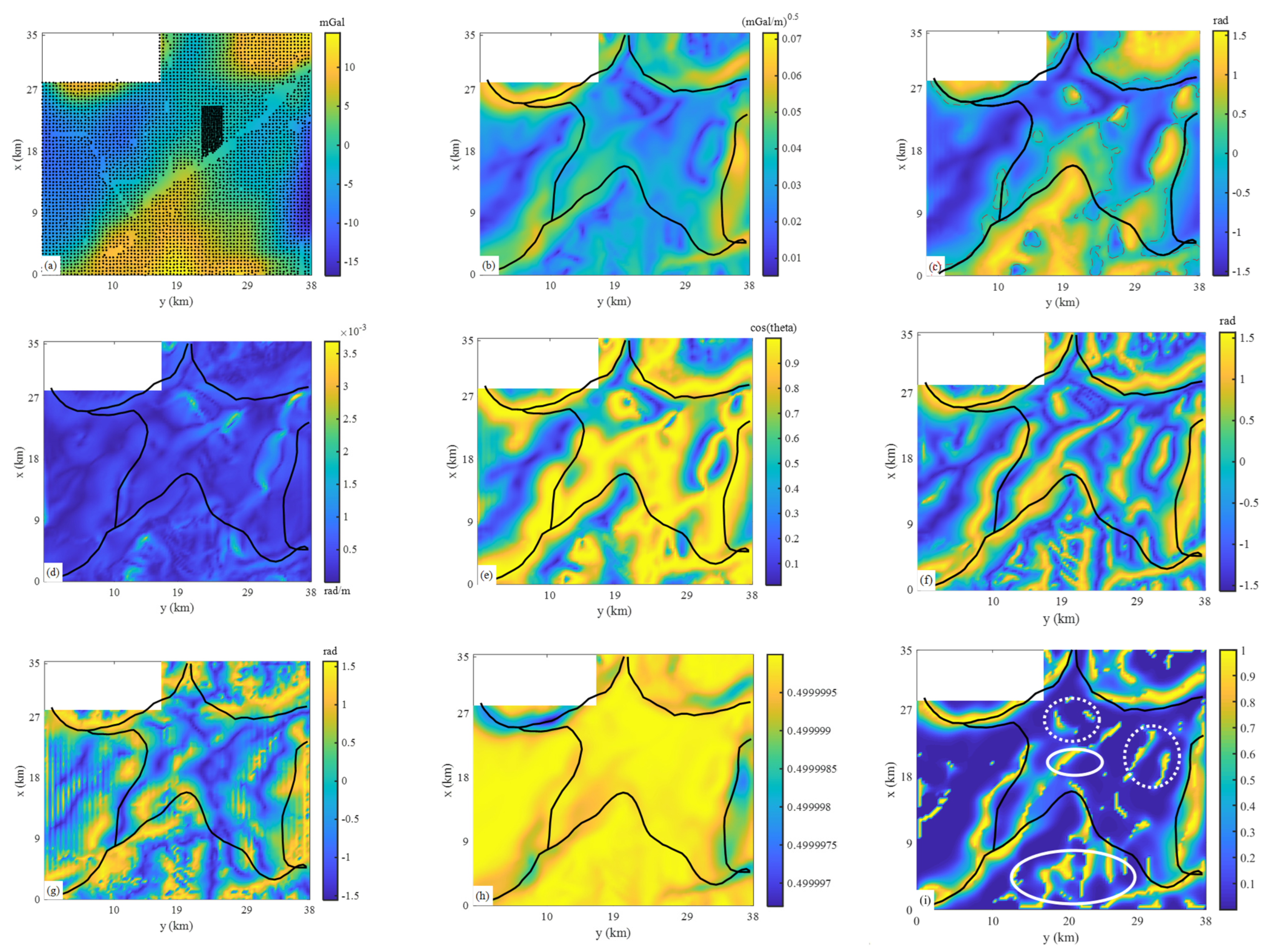
4. Field Gravity Data from Yili Basin
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Cordell, L.; Grauch, V. Mapping basement magnetization zones from aeromagnetic data in the San Juan Basin, New Mexico. In The Utility of Regional Gravity and Magnetic Anomaly Maps; Society of Exploration Geophysicists: Tusla, OK, USA, 1985; pp. 181–197. [Google Scholar]
- Miller, H.G.; Singh, V. Potential field tilt—A new concept for location of potential field sources. J. Appl. Geophys. 1994, 32, 213–217. [Google Scholar] [CrossRef]
- Verduzco, B.; Fairhead, J.D.; Green, C.M.; MacKenzie, C. New insights into magnetic derivatives for structural mapping. Lead. Edge 2004, 23, 116–119. [Google Scholar] [CrossRef]
- Wijns, C.; Perez, C.; Kowalczyk, P. Theta map: Edge detection in magnetic data. Geophysics 2005, 70, L39–L43. [Google Scholar] [CrossRef]
- Ferreira, F.J.; de Souza, J.; de B. e S. Bongiolo, A.; de Castro, L.G. Enhancement of the total horizontal gradient of magnetic anomalies using the tilt angle. Geophysics 2013, 78, J33–J41. [Google Scholar] [CrossRef]
- Cooper, G.R. Reducing the dependence of the analytic signal amplitude of aeromagnetic data on the source vector direction. Geophysics 2014, 79, J55–J60. [Google Scholar] [CrossRef]
- Fairhead, J.; Williams, S. Evaluating normalized magnetic derivatives for structural mapping. In SEG Technical Program Expanded Abstracts; Society of Exploration Geophysicists: Tusla, OK, USA, 2006; pp. 845–849. [Google Scholar]
- Li, X. On “Theta map: Edge detection in magnetic data” (C. Wijns, C. Perez, and P. Kowalczyk, 2005, Geophysics 71, L39–L43). Geophysics 2006, 71, X11. [Google Scholar] [CrossRef]
- Li, X. Understanding 3D analytic signal amplitude. Geophysics 2006, 71, L13–L16. [Google Scholar] [CrossRef]
- Li, X.; Pilkington, M. Attributes of the magnetic field, analytic signal, and monogenic signal for gravity and magnetic interpretation. Geophysics 2016, 81, J79–J86. [Google Scholar] [CrossRef]
- Pilkington, M.; Tschirhart, V. Practical considerations in the use of edge detectors for geologic mapping using magnetic data. Geophysics 2017, 82, J1–J8. [Google Scholar] [CrossRef]
- Cooper, G. Feature detection using sun shading. Comput. Geosci. 2003, 29, 941–948. [Google Scholar] [CrossRef]
- Aqrawi, A.A.; Boe, T.H. Improved fault segmentation using a dip guided and modified 3D Sobel filter. In SEG Technical Program Expanded Abstracts; Society of Exploration Geophysicists: Tusla, OK, USA, 2011; pp. 999–1003. [Google Scholar]
- Sertcelik, I.; Kafadar, O.; Kurtulus, C. Use of the two dimensional gabor filter to interpret magnetic data over the Marmara Sea, Turkey. Pure Appl. Geophys. 2013, 170, 887–894. [Google Scholar] [CrossRef]
- Xiang, S.; Zhang, H. Efficient edge–guided full–waveform inversion by Canny edge detection and bilateral filtering algorithms. Geophys. Suppl. Mon. Not. R. Astron. Soc. 2016, 207, 1049–1061. [Google Scholar] [CrossRef]
- Canny, J. A Computational Approach to Edge Detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 8, 679–698. [Google Scholar] [CrossRef] [PubMed]
- Yalamanchili, S.R.; Hassan, H. Lineament Detection over Shale Gas Play of Horn River Basin Using Monogenic Phase Congruency of Magnetic Data. In Proceedings of the 78th EAGE Conference and Exhibition 2016, Vienna, Austria, 30 May–2 June 2016; pp. 1–5. [Google Scholar]
- Harris, C.G.; Stephens, M. A combined corner and edge detector. In Proceedings of the Alvey Vision Conference 1988, Manchester, UK, 31 August–2 September 1988; pp. 147–152. [Google Scholar]
- Schmid, C.; Mohr, R.; Bauckhage, C. Evaluation of interest point detectors. Int. J. Comput. Vis. 2000, 37, 151–172. [Google Scholar] [CrossRef] [Green Version]
- Cheng, O.; Guangzhi, W.; Quan, Z.; Wei, K.; Hui, D. Evaluating harris method in camera calibration. In Proceedings of the 2005 IEEE Engineering in Medicine and Biology 27th Annual Conference, Shanghai, China, 17–18 January 2005; pp. 6383–6386. [Google Scholar]
- Yao, G.; Cui, J.; Deng, K.; Zhang, L. Robust Harris corner matching based on the quasi–homography transform and self–adaptive window for wide–baseline stereo images. IEEE Trans. Geosci. Remote Sens. 2017, 56, 559–574. [Google Scholar] [CrossRef]
- Chou, T.-K.; Chouteau, M.; Dubé, J.-S. Intelligent meshing technique for 2D resistivity inverse problems. Geophysics 2016, 81, IM45–IM56. [Google Scholar] [CrossRef]
- Blakely, R.J.; Simpson, R.W. Approximating edges of source bodies from magnetic or gravity anomalies. Geophysics 1986, 51, 1494–1498. [Google Scholar] [CrossRef]
- Pawlowski, R.S. On: “Approximating edges of source bodies from magnetic or gravity anomalies” by RJ Blakely and RW Simpson (Geophysics 51, 1494–1498, July 1986). Geophysics 1989, 54, 1214. [Google Scholar] [CrossRef]
- Sibson, R. A brief description of natural neighbour interpolation. In Interpreting Multivariate Data; John, Wiley & Sons: Hoboken, NJ, USA, 1981. [Google Scholar]
- Oruç, B. Edge detection and depth estimation using a tilt angle map from gravity gradient data of the Kozaklı–Central Anatolia Region, Turkey. Pure Appl. Geophys. 2011, 168, 1769–1780. [Google Scholar] [CrossRef]
- Williams, S.E.; Fairhead, J.D.; Flanagan, G. Comparison of grid Euler deconvolution with and without 2D constraints using a realistic 3D magnetic basement model. Geophysics 2005, 70, L13–L21. [Google Scholar] [CrossRef]
- Salem, A.; Williams, S.; Fairhead, D.; Smith, R.; Ravat, D. Interpretation of magnetic data using tilt–angle derivatives. Geophysics 2008, 73, L1–L10. [Google Scholar] [CrossRef]
- Zhou, W.; Nan, Z.; Li, J. Self–constrained Euler deconvolution using potential field data of different altitudes. Pure Appl. Geophys. 2016, 173, 2073–2085. [Google Scholar] [CrossRef]
- Suo, K. Study on the Tectonic Characteristics of Central Yili Basin Based on Comprehensive Interpretation of Gravity and Magnetic Data. Ph.D. Thesis, China University of Geosciences, Beijing, China, 2016. (In Chinese). [Google Scholar]
- Xiong, L. Comprehensive Analysis of Yili Petroliferous Basin. Ph.D. Thesis, Northwest University, Xi’an, China, 2003. (In Chinese). [Google Scholar]
- Chen, T.; Yang, D. Joint inversion of time-domain and frequency-domain electromagnetic data contaminated by coherent noises using an agree-to-disagree strategy. In SEG Technical Program Expanded Abstracts; Society of Exploration Geophysicists: Tusla, OK, USA, 2020; pp. 565–569. [Google Scholar]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, T.; Zhang, G. NHF as an Edge Detector of Potential Field Data and Its Application in the Yili Basin. Minerals 2022, 12, 149. https://doi.org/10.3390/min12020149
Chen T, Zhang G. NHF as an Edge Detector of Potential Field Data and Its Application in the Yili Basin. Minerals. 2022; 12(2):149. https://doi.org/10.3390/min12020149
Chicago/Turabian StyleChen, Tao, and Guibin Zhang. 2022. "NHF as an Edge Detector of Potential Field Data and Its Application in the Yili Basin" Minerals 12, no. 2: 149. https://doi.org/10.3390/min12020149