
A New Pelican Optimization Algorithm for the Parameter Identification of Memristive Chaotic System

Abstract
:1. Introduction
- (1)
- We used fractional-order chaotics to initialize the population members of the POA instead of random initialization;
- (2)
- We employed the Pareto distribution to accelerate global convergence and prevent it from being trapped in a local optimum;
- (3)
- The improved POA was tested with benchmark functions;
- (4)
- The FPPOA was employed to determine the parameters of an exemplary chaotic system.
2. Methods
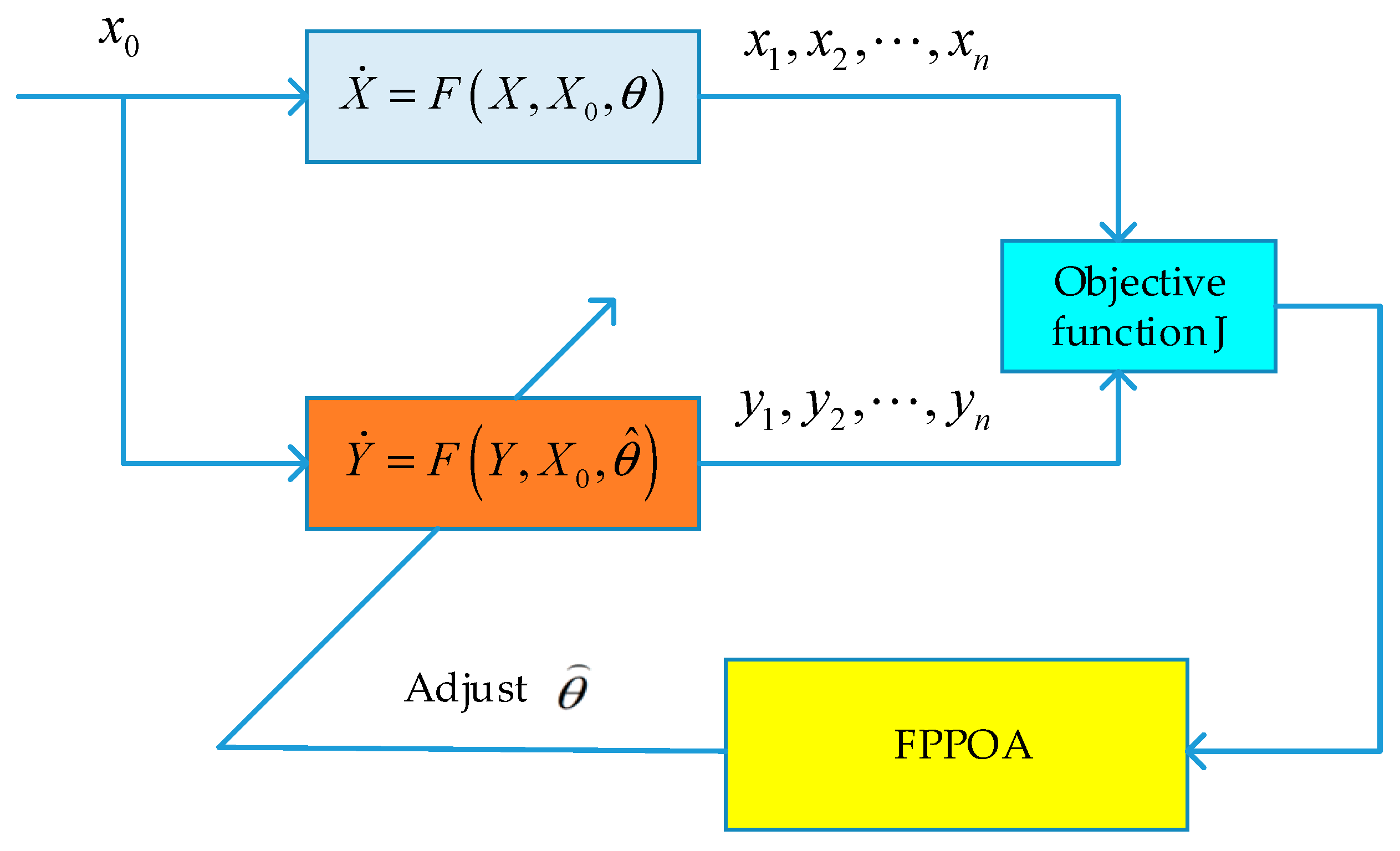
2.1. Theory of Parameter Identification
2.2. Principle of Pelican Optimization Algorithm
2.2.1. Initialization
2.2.2. Moving towards Food Source (Exploration Phase)
2.2.3. Winging on the Water Surface (Exploitation Phase)
2.3. Fractional-Order Chaotic Cauchy Pelican Optimization Algorithm
2.3.1. Population Initialization with a Chaotic Fractional Sequence
2.3.2. Update Position in the Exploitation Phase
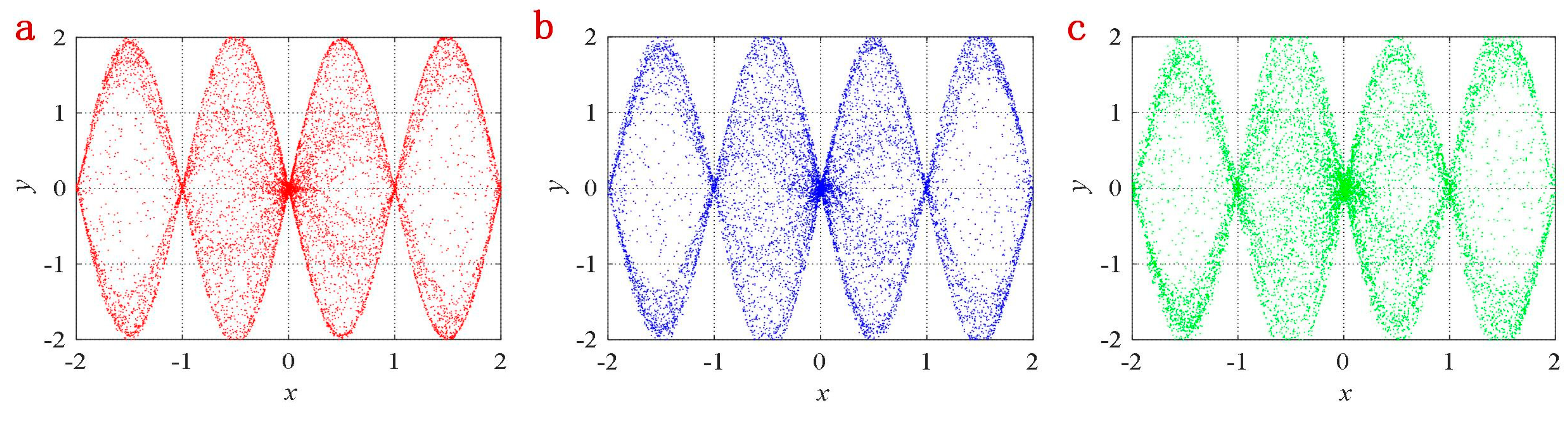
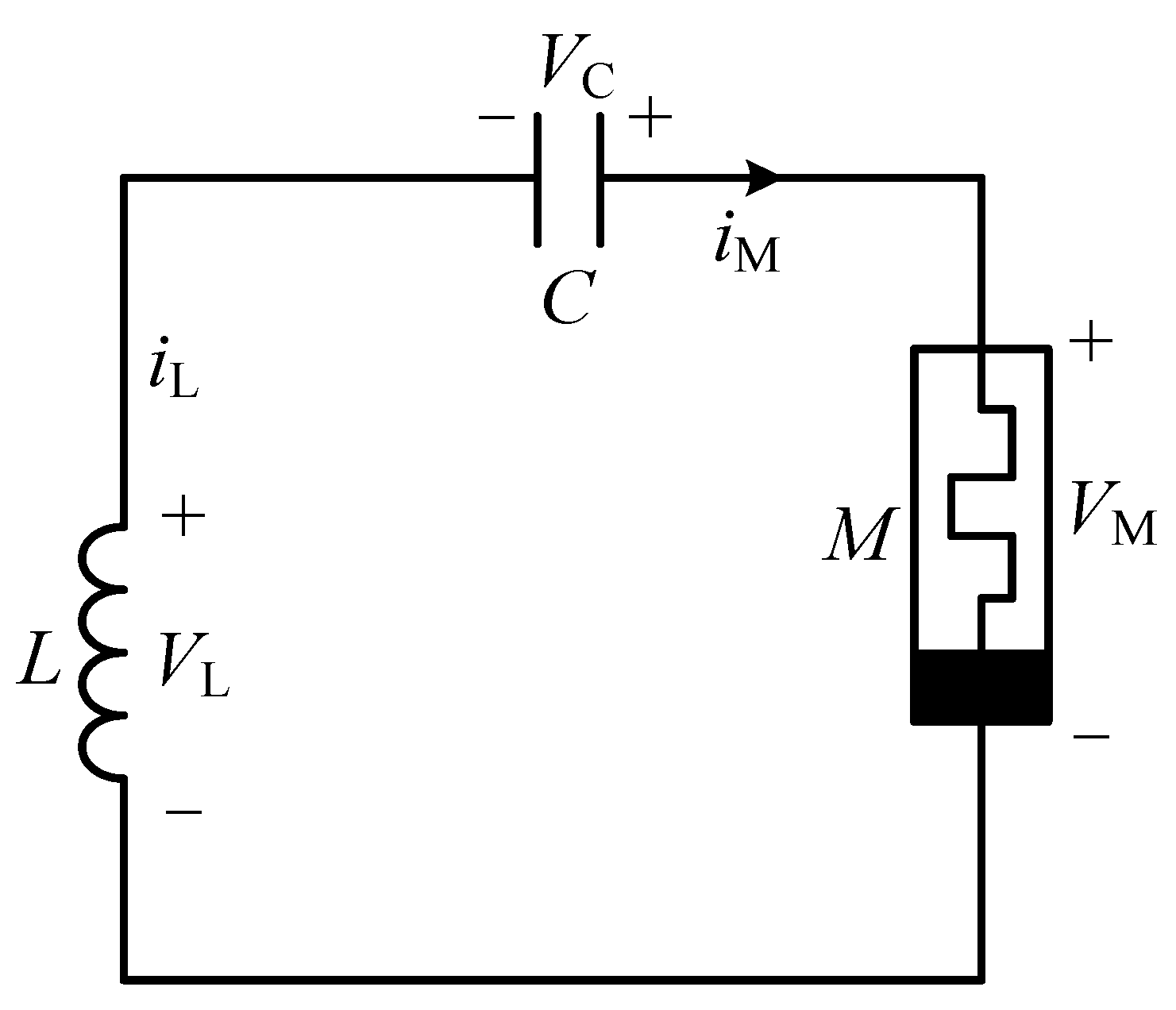
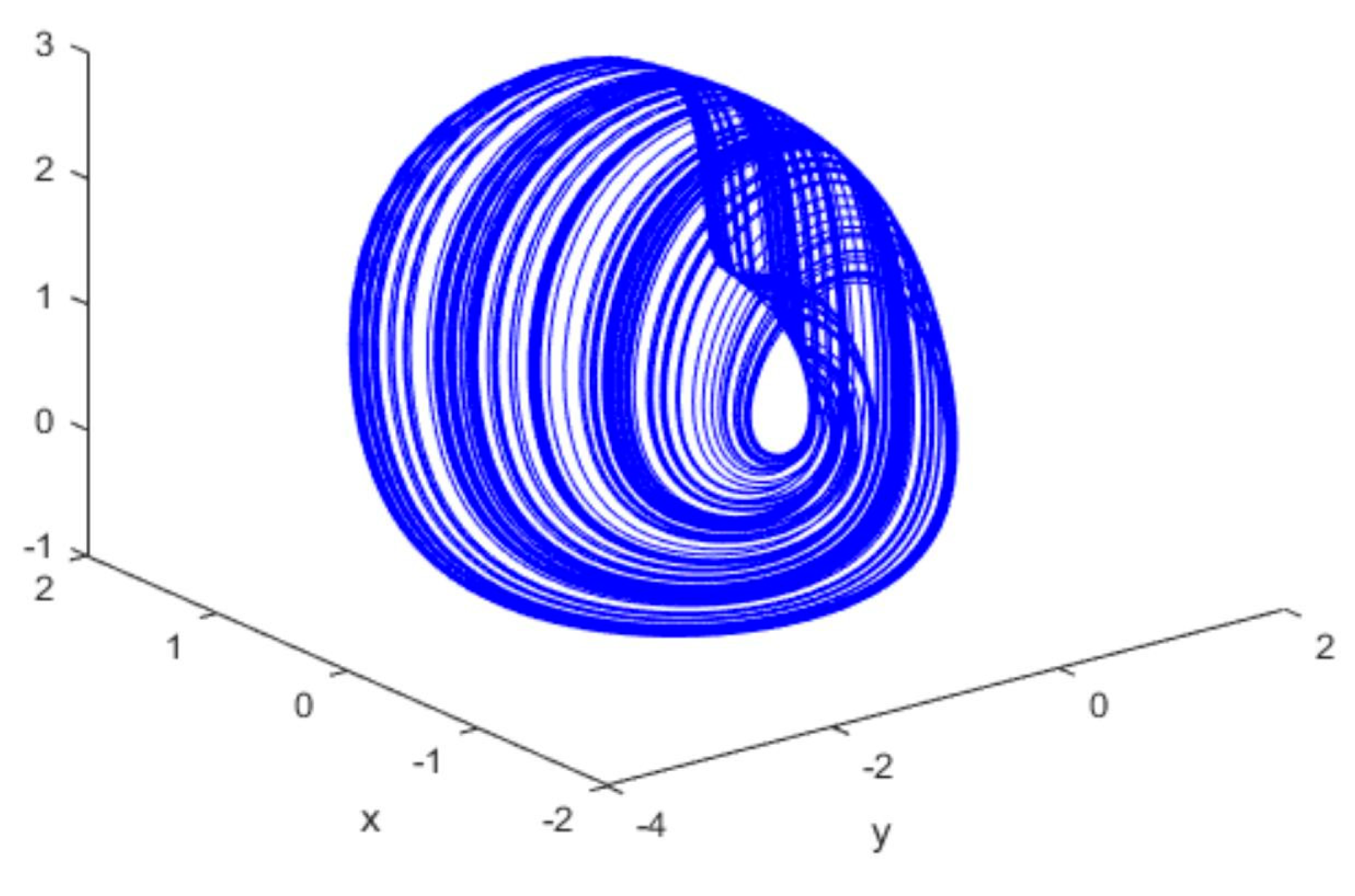
2.4. A Chaotic System with Memristive Properties
2.5. Parameter Identification with FPPOA
| Algorithm 1 Pseudo code of FPPOA in parameter identification |
| Input: the maximum iterations as the Tmax, the population size as N, and the range of parameters. |
| Output: the values of the parameters. |
| 1. Initialize the members using the fractional chaotic sequence; |
| 2. Calculate the objective function value of each individual, and find the Gbest; |
| 3. while (t < Tmax); |
| 4. Update the location of the pelican by Equations (5) and (11); |
| 5. Compute the value of the individual’s objective function; |
| 6. Sort the objective function value; |
| 7. Obtain the best solution (Gbest); |
| 8. Update the best solution if it is better than before; |
| 9. t = t + 1; |
| End while |
| 10. Output the values of parameters. |
3. Experiments Results
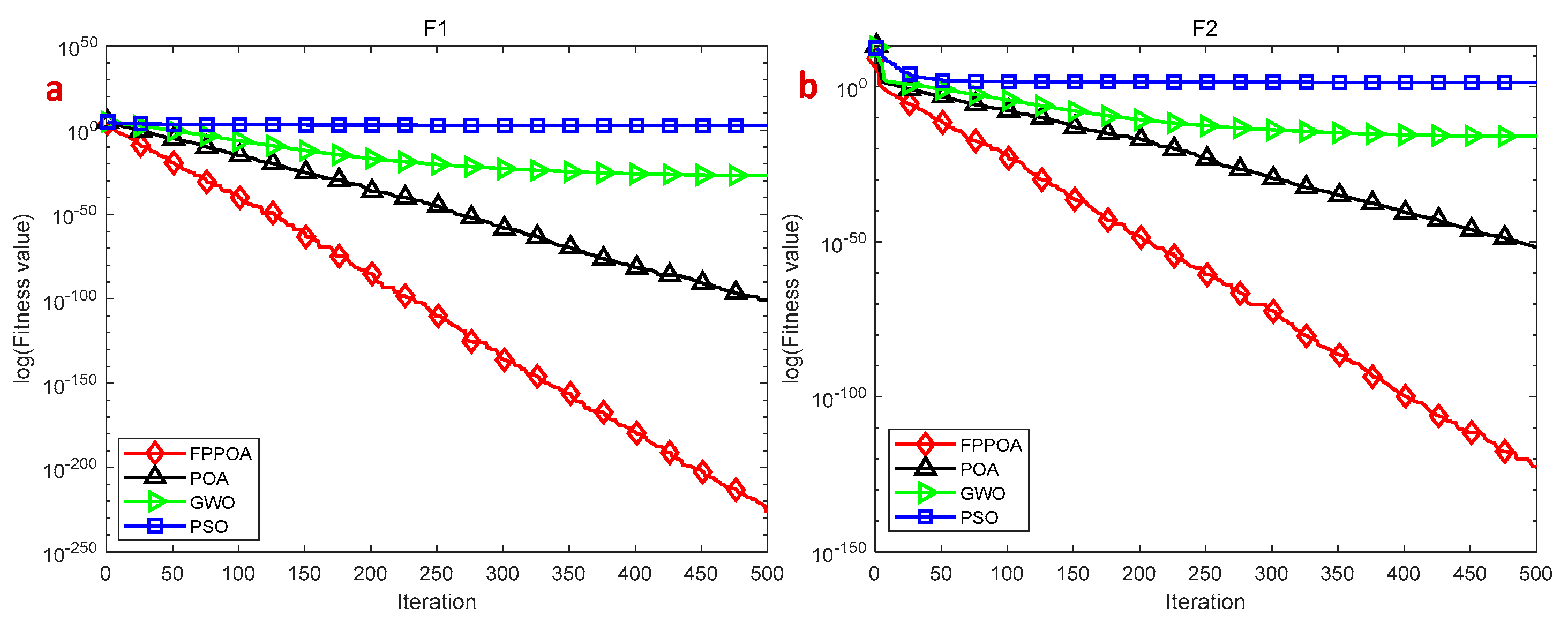
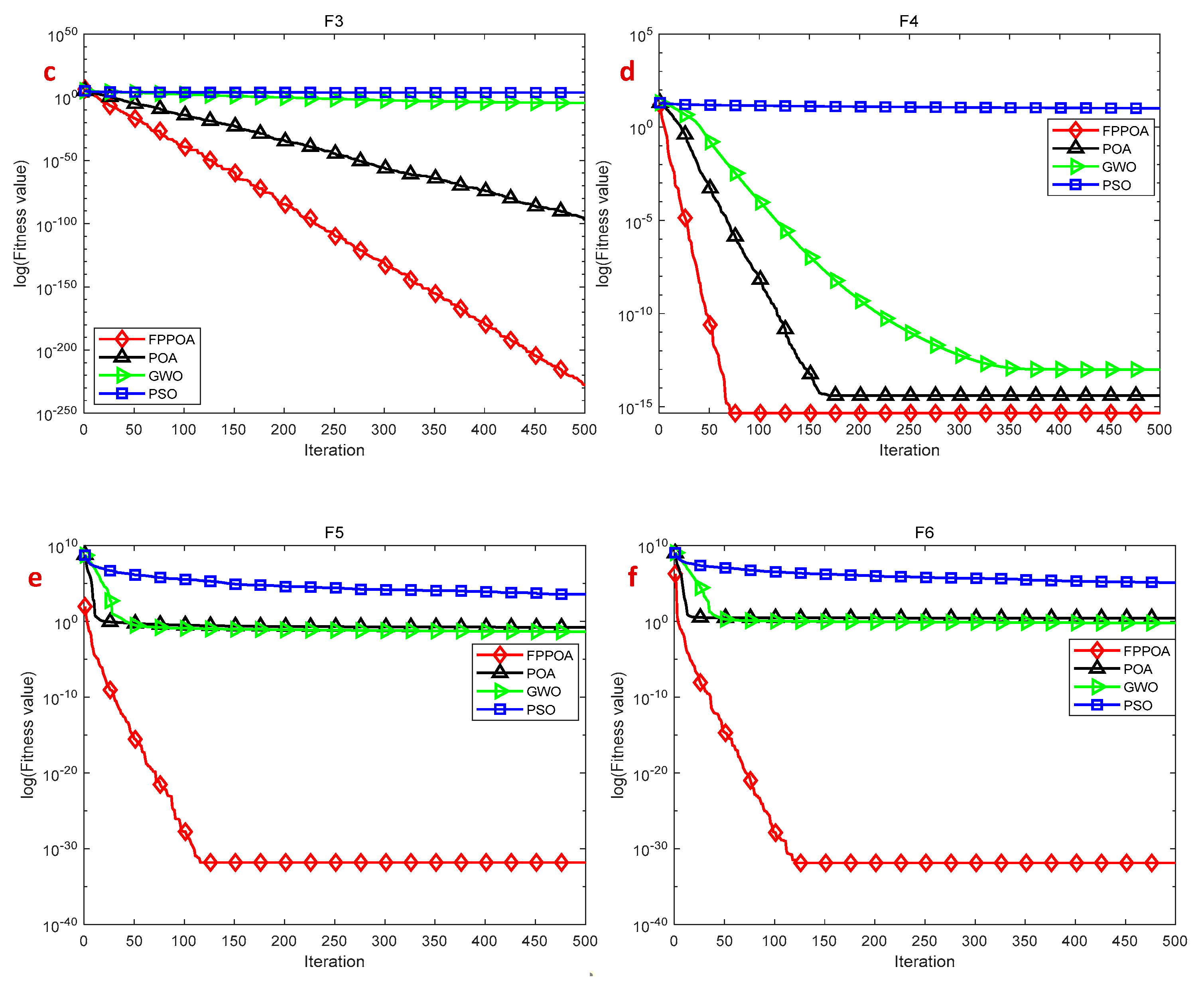
3.1. Benchmark Function Comparison Experiment
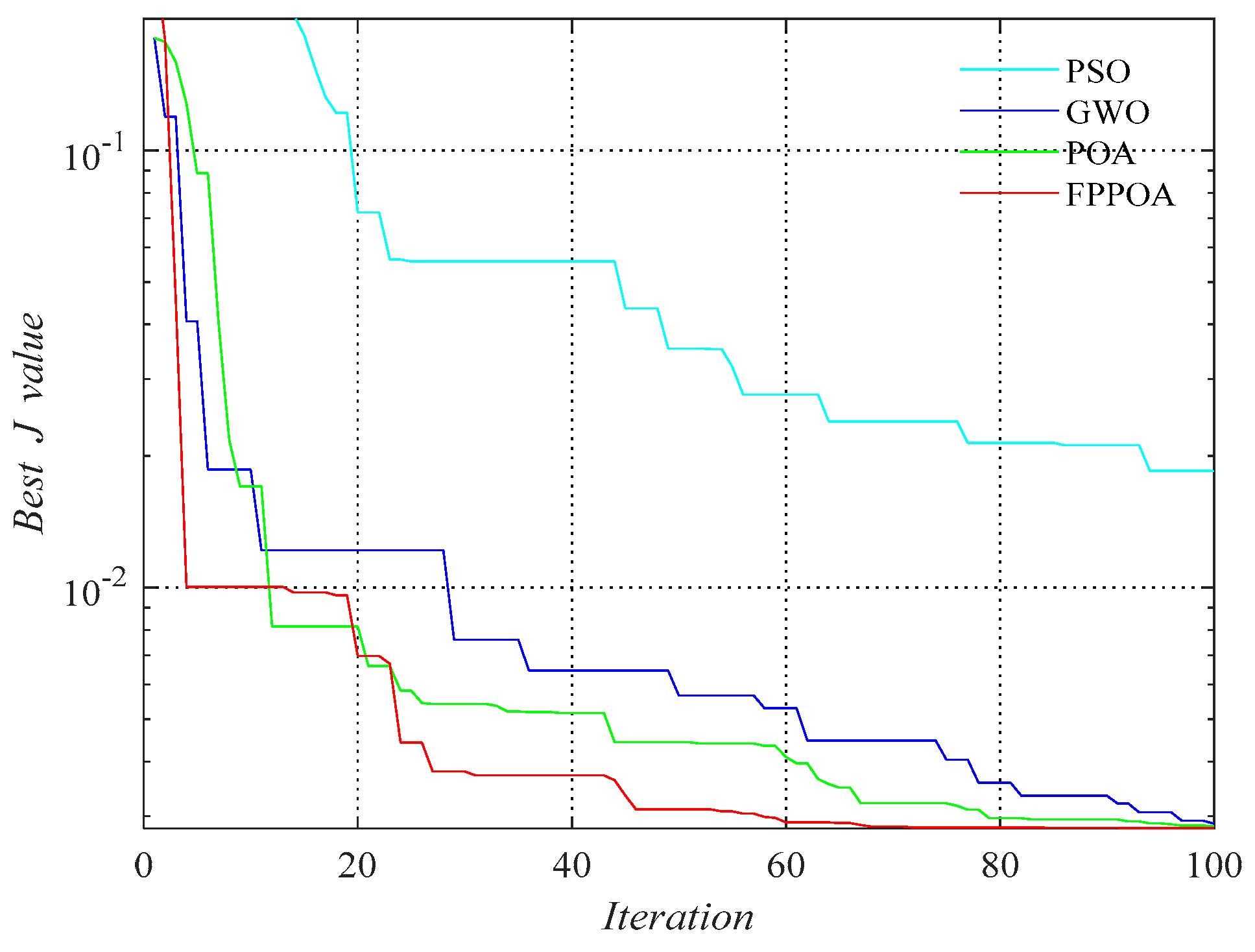
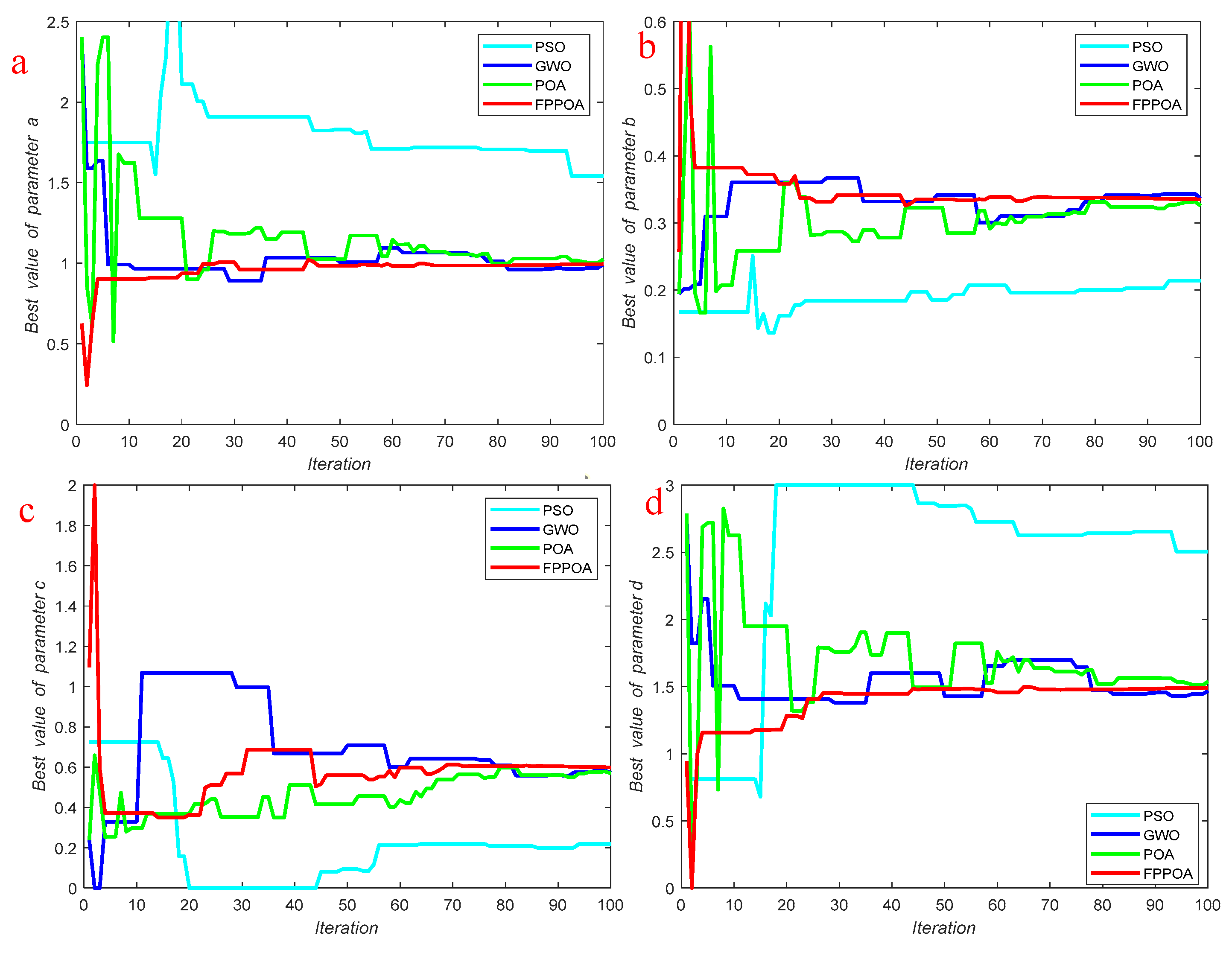
3.2. Simulation Test on Parameter Identification
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mazumder, P.; Kang, S.M.; Waser, R. Memristors: Devices, models, and applications. Proc. IEEE 2012, 100, 1911–1919. [Google Scholar] [CrossRef]
- Strukov, D.B.; Snider, G.S.; Stewart, D.R.; Williams, R.S. The missing memristor found. Nature 2008, 453, 80–83. [Google Scholar] [CrossRef] [PubMed]
- He, S.; Liu, J.; Wang, H.; Sun, K. A discrete memristive neural network and its application for character recognition. Neurocomputing 2023, 523, 1–8. [Google Scholar] [CrossRef]
- Yao, P.; Wu, H.; Gao, B.; Tang, J.; Zhang, Q.; Zhang, W.; Yang, J.J.; Qian, H. Fully hardware-implemented memristor convolutional neural network. Nature 2020, 577, 641–646. [Google Scholar] [CrossRef]
- Zhao, B.; Xiao, M.; Zhou, Y.N. Synaptic learning behavior of a TiO2 nanowire memristor. Nanotechnology 2019, 30, 425202. [Google Scholar] [CrossRef]
- Lakshmi Priya, G.; Rawat, N.; Abhishek, S.; Venkatesh, M. Modeling and simulation of double gate dielectric stack silicon substrate memristor circuits for low power applications. Silicon 2022, 14, 12403–12414. [Google Scholar] [CrossRef]
- Babacan, Y.; Yesil, A.; Tozlu, O.F.; Kacar, F. Investigation of STDP mechanisms for memristor circuits. AEU-Int. J. Electron. Commun. 2022, 151, 154230. [Google Scholar] [CrossRef]
- Itoh, M.; Chua, L.O. Dynamics of memristor circuits. Int. J. Bifurc. Chaos 2014, 24, 1430015. [Google Scholar] [CrossRef]
- Chen, M.; Wang, Z.; Nazarimehr, F.; Jafari, S. A novel memristive chaotic system without any equilibrium point. Integration 2021, 79, 133–142. [Google Scholar] [CrossRef]
- Ostrovskii, V.; Fedoseev, P.; Bobrova, Y.; Butusov, D. Structural and Parametric Identification of Knowm Memristors. Nanomaterials 2021, 12, 63. [Google Scholar] [CrossRef] [PubMed]
- Yan, S.; Ren, Y.; Song, Z.; Shi, W.; Sun, X. A memristive chaotic system with rich dynamical behavior and circuit implementation. Integration 2022, 85, 63–75. [Google Scholar] [CrossRef]
- Li, Y.; Huang, X.; Song, Y.; Lin, J. A new fourth-order memristive chaotic system and its generation. Int. J. Bifurc. Chaos 2015, 25, 1550151. [Google Scholar] [CrossRef]
- Kumar, C.; Raj, T.D.; Premkumar, M.; Raj, T.D. A new stochastic slime mould optimization algorithm for the estimation of solar photovoltaic cell parameters. Optik 2020, 223, 165277. [Google Scholar] [CrossRef]
- Manoharan, P.; Subramaniam, U.; Babu, T.S.; Padmanaban, S.; Holm-Nielsen, J.B.; Mitolo, M.; Ravichandran, S. Improved perturb and observation maximum power point tracking technique for solar photovoltaic power generation systems. IEEE Syst. J. 2020, 15, 3024–3035. [Google Scholar] [CrossRef]
- Premkumar, M.; Jangir, P.; Sowmya, R.; Elavarasan, R.M.; Kumar, B.S. Enhanced chaotic JAYA algorithm for parameter estimation of photovoltaic cell/modules. ISA Trans. 2021, 116, 139–166. [Google Scholar] [CrossRef] [PubMed]
- Abualigah, L. Group search optimizer: A nature-inspired meta-heuristic optimization algorithm with its results, variants, and applications. Neural Comput. Appl. 2021, 33, 2949–2972. [Google Scholar] [CrossRef]
- Lazzus, J.A.; Vega-Jorquera, P.; Lopez-Caraballo, C.H.; Palma-Chilla, L.; Salfate, I. Parameter estimation of a generalized lotka–volterra system using a modified pso algorithm. Appl. Soft Comput. 2020, 96, 106606. [Google Scholar] [CrossRef]
- Peng, Y.; Sun, K.; He, S.; Yang, X. Parameter estimation of a complex chaotic system with unknown initial values. Eur. Phys. J. Plus 2018, 133, 1–13. [Google Scholar] [CrossRef]
- Toktas, A.; Erkan, U.; Toktas, F.; Yetgın, Z. Chaotic map optimization for image encryption using triple objective differential evolution algorithm. IEEE Access 2021, 9, 127814–127832. [Google Scholar] [CrossRef]
- Toktas, A.; Erkan, U.; Ustun, D.; Wang, X. Parameter optimization of chaotic system using Pareto-based triple objective artificial bee colony algorithm. Neural Comput. Appl. 2023, 35, 13207–13223. [Google Scholar] [CrossRef]
- Zhang, P.; Yang, R.; Yang, R.; Ren, G.; Yang, X.; Xu, C.; Xu, B.; Zhang, H.; Cai, Y.; Lu, Y. Parameter estimation for fractional-order chaotic systems by improved bird swarm optimization algorithm. Int. J. Mod. Phys. C 2019, 30, 1950086. [Google Scholar] [CrossRef]
- Chen, F.; Ding, Z.; Lu, Z.; Zeng, X. Parameters identification for chaotic systems based on a modified Jaya algorithm. Nonlinear Dyn. 2018, 94, 2307–2326. [Google Scholar] [CrossRef]
- Peng, Y.; Sun, K.; He, S.; Peng, D. Parameter identification of fractional-order discrete chaotic systems. Entropy 2019, 21, 27. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Peng, Y.X.; Sun, K.H.; He, S.B. Dynamics analysis of chaotic maps: From perspective on parameter estimation by meta-heuristic algorithm. Chin. Phys. B 2020, 29, 030502. [Google Scholar] [CrossRef]
- Peng, Y.; He, S.; Sun, K. Parameter identification for discrete memristive chaotic map using adaptive differential evolution algorithm. Nonlinear Dyn. 2022, 107, 1263–1275. [Google Scholar] [CrossRef]
- Trojovský, P.; Dehghani, M. Pelican optimization algorithm: A novel nature-inspired algorithm for engineering applications. Sensors 2022, 22, 855. [Google Scholar] [CrossRef]
- Tuerxun, W.; Xu, C.; Haderbieke, M.; Guo, L.; Cheng, Z. A wind turbine fault classification model using broad learning system optimized by improved pelican optimization algorithm. Machines 2022, 10, 407. [Google Scholar] [CrossRef]
- Xiong, Q.; Zhang, X.; Xu, X.; He, S. A modified chaotic binary particle swarm optimization scheme and its application in face-iris multimodal biometric identification. Electronics 2021, 10, 217. [Google Scholar] [CrossRef]
- Xiong, Q.; Zhang, X.; He, S.; Shen, J. A fractional-order chaotic sparrow search algorithm for enhancement of long distance iris image. Mathematics 2021, 9, 2790. [Google Scholar] [CrossRef]
- He, S.; Sun, K.; Wu, X. Fractional symbolic network entropy analysis for the fractional-order chaotic systems. Phys. Scr. 2020, 95, 035220. [Google Scholar] [CrossRef]
- Haj Ahmad, H.; Almetwally, E.M. Generating Optimal Discrete Analogue of the Generalized Pareto Distribution under Bayesian Inference with Applications. Symmetry 2022, 14, 1457. [Google Scholar] [CrossRef]
- Alibakhshikenari, M.; Virdee, B.S.; See, C.H.; Abd-Alhameed, R.A.; Falcone, F.; Limiti, E. Super-wide impedance bandwidth planar antenna for microwave and millimeter-wave applications. Sensors 2019, 19, 2306. [Google Scholar] [CrossRef] [Green Version]
- Alibakhshi-Kenari, M.; Andújar, A.; Anguera, J. New compact printed leaky-wave antenna with beam steering. Microw. Opt. Technol. Lett. 2016, 58, 215–217. [Google Scholar] [CrossRef]
- Alibakhshikenari, M.; Virdee, B.S.; Shukla, P.; See, C.H.; Abd-Alhameed, R.A.; Falcone, F.; Limiti, E. Improved adaptive impedance matching for RF front-end systems of wireless transceivers. Sci. Rep. 2020, 10, 14065. [Google Scholar] [CrossRef]
- Awan, W.A.; Naqvi, S.I.; Ali, W.A.E.; Hussain, N.; Iqbal, A.; Tran, H.H.; Alibakhshikenari, M.; Limiti, E. Design and realization of a frequency reconfigurable antenna with wide, dual, and single-band operations for compact sized wireless applications. Electronics 2021, 10, 1321. [Google Scholar] [CrossRef]
- Mou, J.; Xia, B.; Guo, W.; Li, T.; Wang, H. Circuit implementation and application of memristor. J. Dalian Polytech. Univ. 2015, 34, 214–216. [Google Scholar]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Benchmark Functions | Dim | Range | Fmin |
|---|---|---|---|---|
| Unimodal benchmark functions | 30 | [−100, 100] | 0 | |
| 30 | [−10, 10] | 0 | ||
| 30 | [−100, 100] | 0 | ||
| Multimodal benchmark functions | 30 | [−32, 32] | 0 | |
| 30 | [−50, 50] | 0 | ||
| 30 | [−50, 50] | 0 |
| F | SI | Best | Average | Std. | Computation Time (s) |
|---|---|---|---|---|---|
| F1 | PSO | 7.213 | 1.885 × 102 | 87.91 | 1.5 |
| GWO | 1.8448 × 10−29 | 1.362 × 10−27 | 2.4093 × 10−27 | 3.6 | |
| POA | 1.5245 × 10−118 | 1.7523 × 10−101 | 9.5379 × 10−101 | 3.51 | |
| FPPOA | 6.4028 × 10−245 | 1.4332 × 10−226 | 0 | 4.52 | |
| F2 | PSO | 8.160150 | 3.057447 × 10 | 20.0995 | 1.23973 |
| GWO | 2.7059 × 10−17 | 9.9414 × 10−17 | 9.3072 × 10−17 | 3.6 | |
| POA | 2.6592 × 10−59 | 1.6988 × 10−52 | 4.7363 × 10−52 | 3.6 | |
| FPPOA | 1.0471 × 10−138 | 3.3491 × 10−123 | 1.8154 × 10−122 | 4.67 | |
| F3 | PSO | 2.908686 × 103 | 8.612808 × 103 | 5414.9 | 6.26 |
| GWO | 7.451× 10−10 | 4.3214 × 10−5 | 0.0001 | 6.6 | |
| POA | 4.7259 × 10−115 | 3.9312 × 10−97 | 2.1532 × 10−96 | 9.6 | |
| FPPOA | 2.1391 × 10−246 | 2.5878 × 10−228 | 0 | 10.49 | |
| F4 | PSO | 9.002 | 10.423 | 0.897 | 2.01 |
| GWO | 6.7946 × 10−14 | 9.8973 × 10−14 | 1.5666 × 10−14 | 9.82 | |
| POA | 4.4409 × 10−16 | 3.8784 × 10−15 | 6.4863 × 10−16 | 4.06 | |
| FPPOA | 4.4409 × 10−16 | 4.4409 × 10−16 | 0 | 4.89 | |
| F5 | PSO | 1.1014 | 4.680 | 2.562 | 8.92 |
| GWO | 0.0133 | 0.044 | 0.023 | 9.38 | |
| POA | 0.085 | 0.165 | 0.051 | 14.65 | |
| FPPOA | 1.5705 × 10−32 | 1.5705 × 10−32 | 5.5674 × 10−48 | 15.49 | |
| F6 | PSO | 4.334 | 15.261 | 9.078 | 9.03 |
| GWO | 0.101 | 0.583 | 0.299 | 9.15 | |
| POA | 1.955 | 2.763 | 0.332 | 14.15 | |
| FPPOA | 1.349784 × 10−32 | 1.349784 × 10−32 | 5.5674 × 10−48 | 15.34 |
| SI | a | Error Rate% | b | Error Rate% | c | Error Rate% | d | Error Rate% | Best J Value | |
|---|---|---|---|---|---|---|---|---|---|---|
| PSO | 1.5408 | 54 | 0.2138 | 35.86 | 0.2196 | 63.4 | 2.5068 | 67.12 | 1.848 × 10−2 | |
| GWO | 0.9905 | 0.95 | 0.3367 | 1.01 | 0.5723 | 4.61 | 1.4680 | 2.13 | 2.883 × 10−3 | |
| POA | 1.0238 | 2.38 | 0.3258 | 0.25 | 0.5689 | 5.18 | 1.5372 | 2.48 | 2.847 × 10−2 | |
| FPPOA | 0.9952 | 0.48 | 0.3351 | 0.54 | 0.5989 | 0.18 | 1.4909 | 0.61 | 2.814 × 10−2 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiong, Q.; She, J.; Xiong, J. A New Pelican Optimization Algorithm for the Parameter Identification of Memristive Chaotic System. Symmetry 2023, 15, 1279. https://doi.org/10.3390/sym15061279
Xiong Q, She J, Xiong J. A New Pelican Optimization Algorithm for the Parameter Identification of Memristive Chaotic System. Symmetry. 2023; 15(6):1279. https://doi.org/10.3390/sym15061279
Chicago/Turabian StyleXiong, Qi, Jincheng She, and Jinkun Xiong. 2023. "A New Pelican Optimization Algorithm for the Parameter Identification of Memristive Chaotic System" Symmetry 15, no. 6: 1279. https://doi.org/10.3390/sym15061279