
Intersection and Flattening of Surfaces in 3D Models through Computer-Extended Descriptive Geometry (CeDG)

Abstract
:1. Introduction
2. Materials and Methods
- Feasibility to reach the parametric 3D hopper’s model and the required flat patterns.
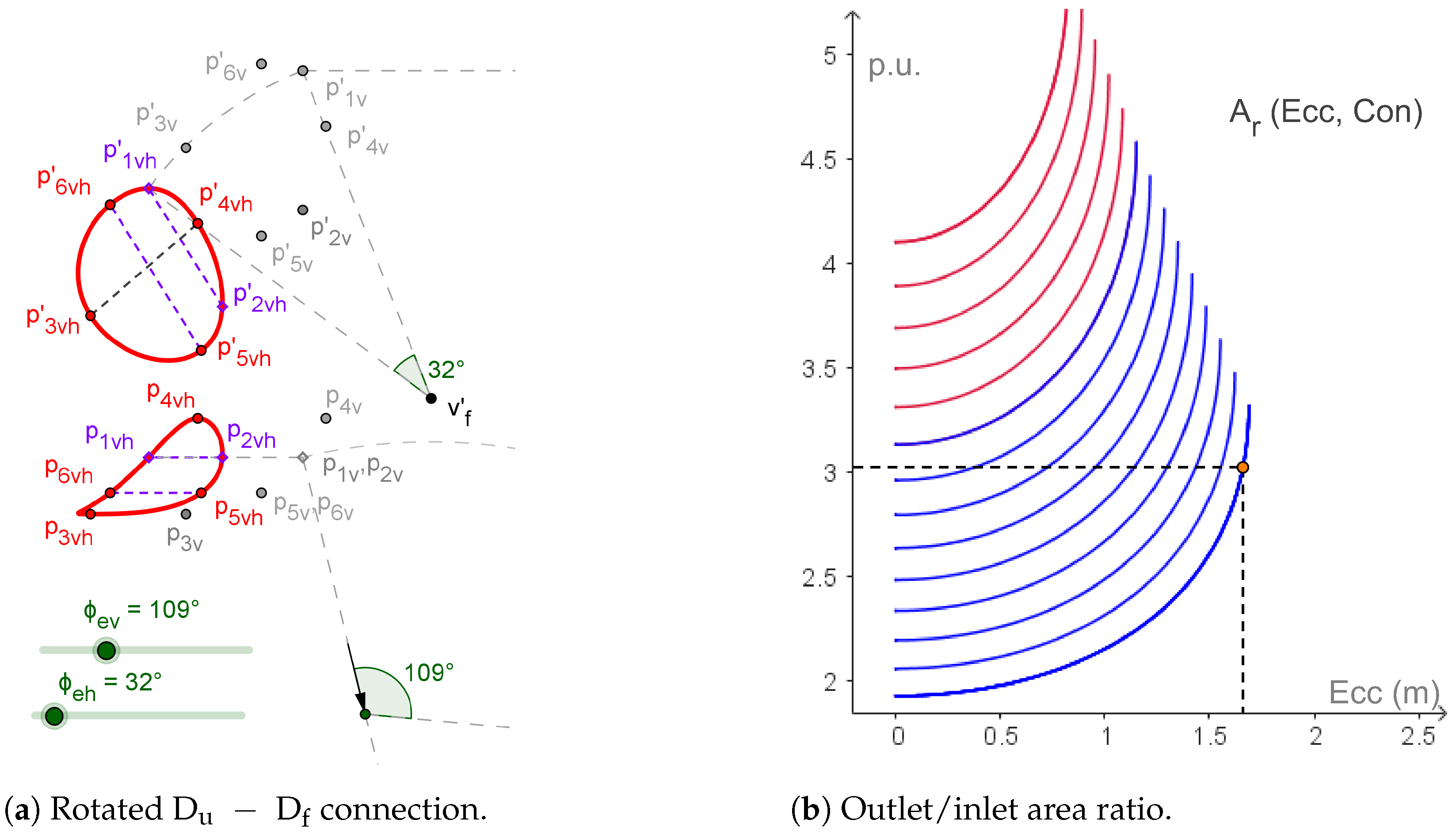
- Application of the 3D model to achieve > 3 with minimum conicity through the eccentricity dimension.
- Accuracy of the and flat patterns.
3. Results
3.1. Surfaces’ Intersection and Flattening through Locus-Based Parametric Functions
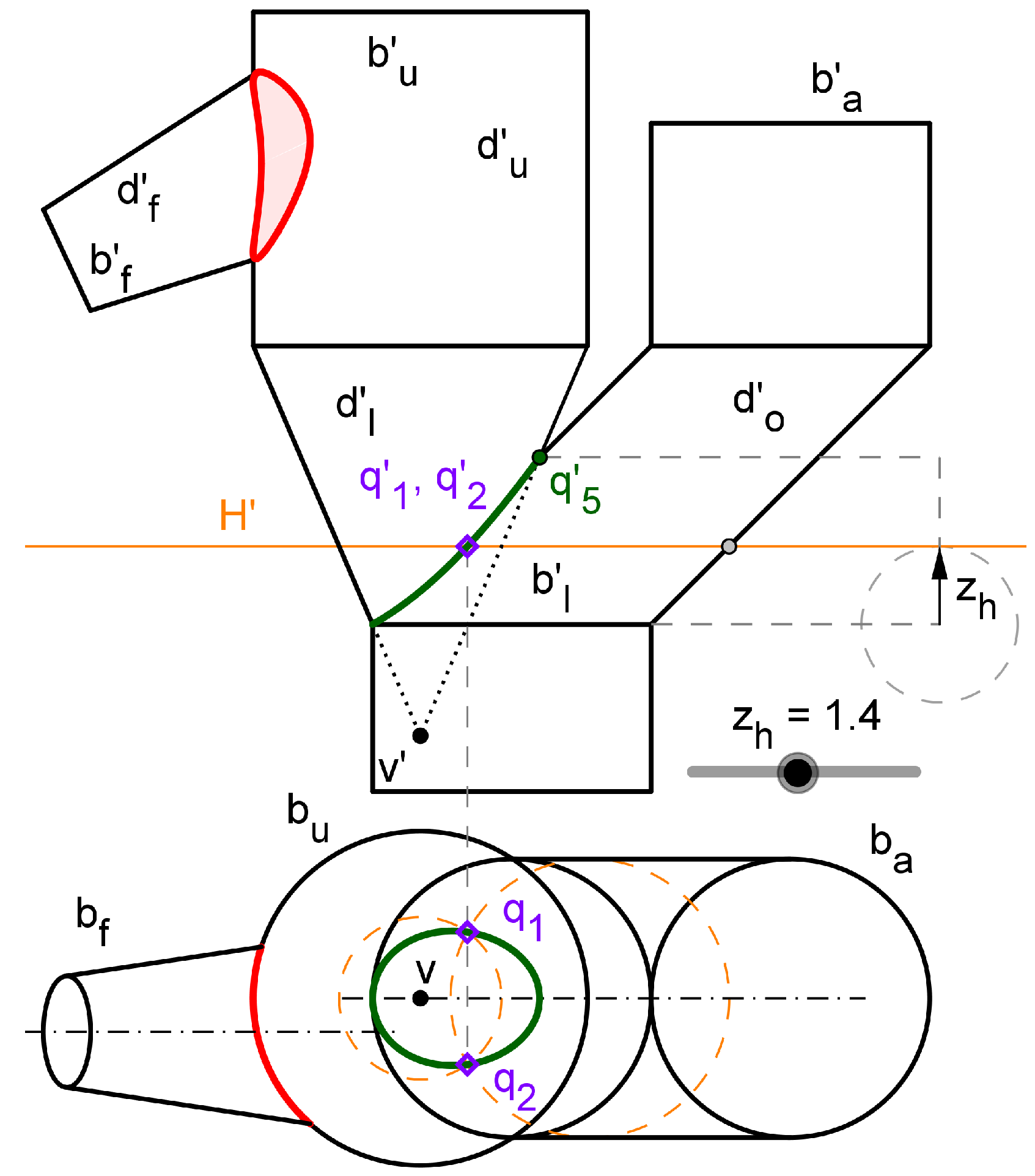
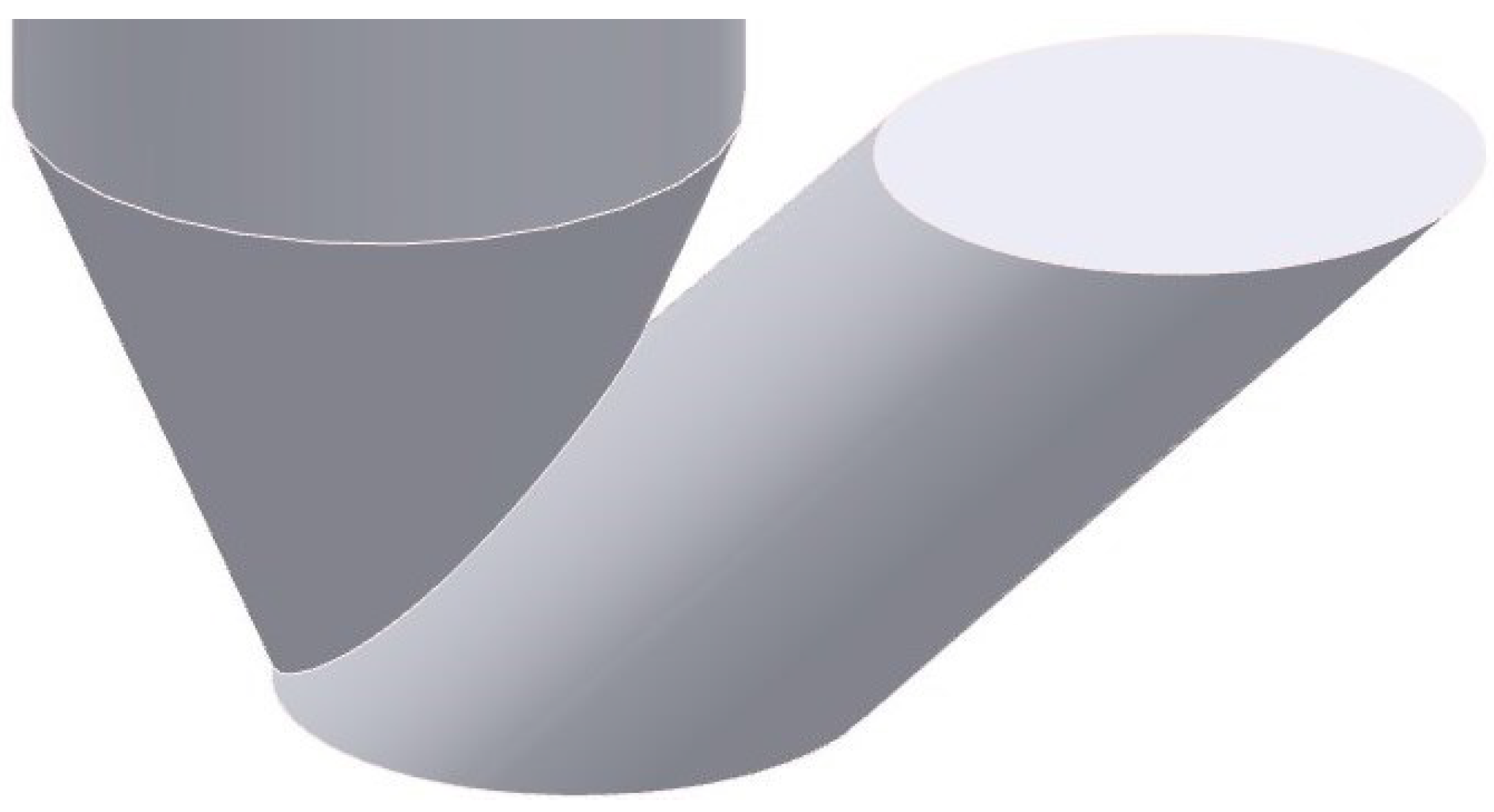
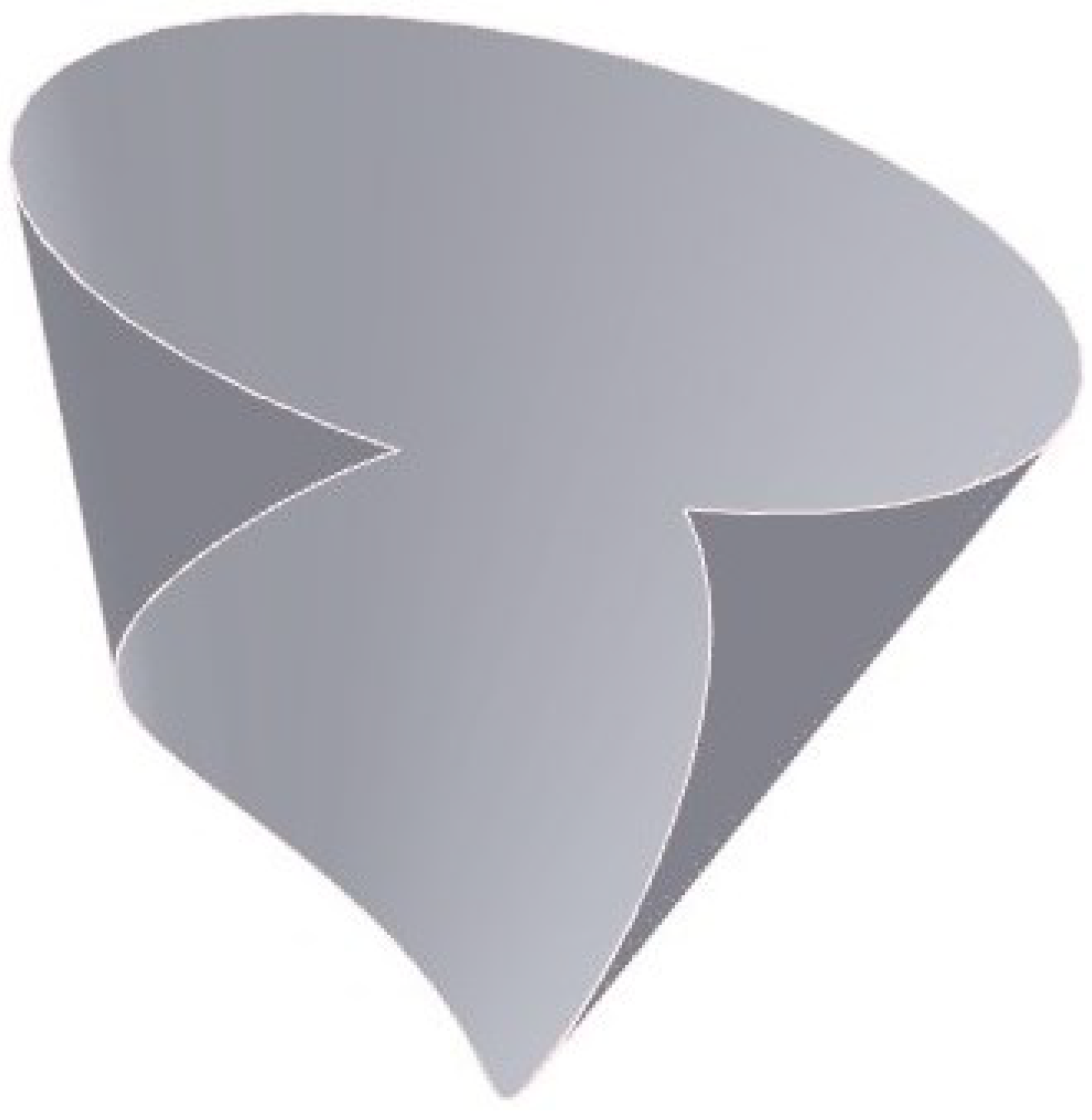
3.1.1. Surface-to-Surface Intersections
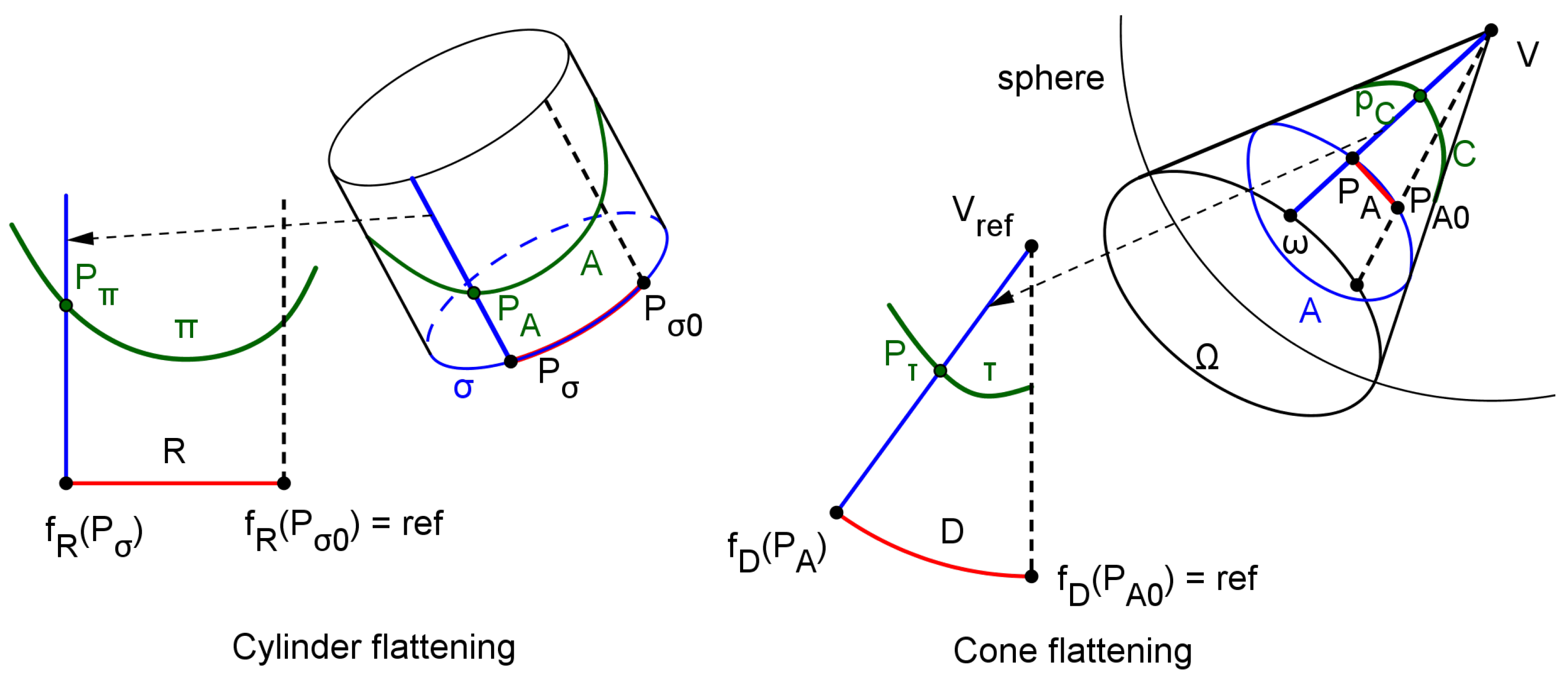
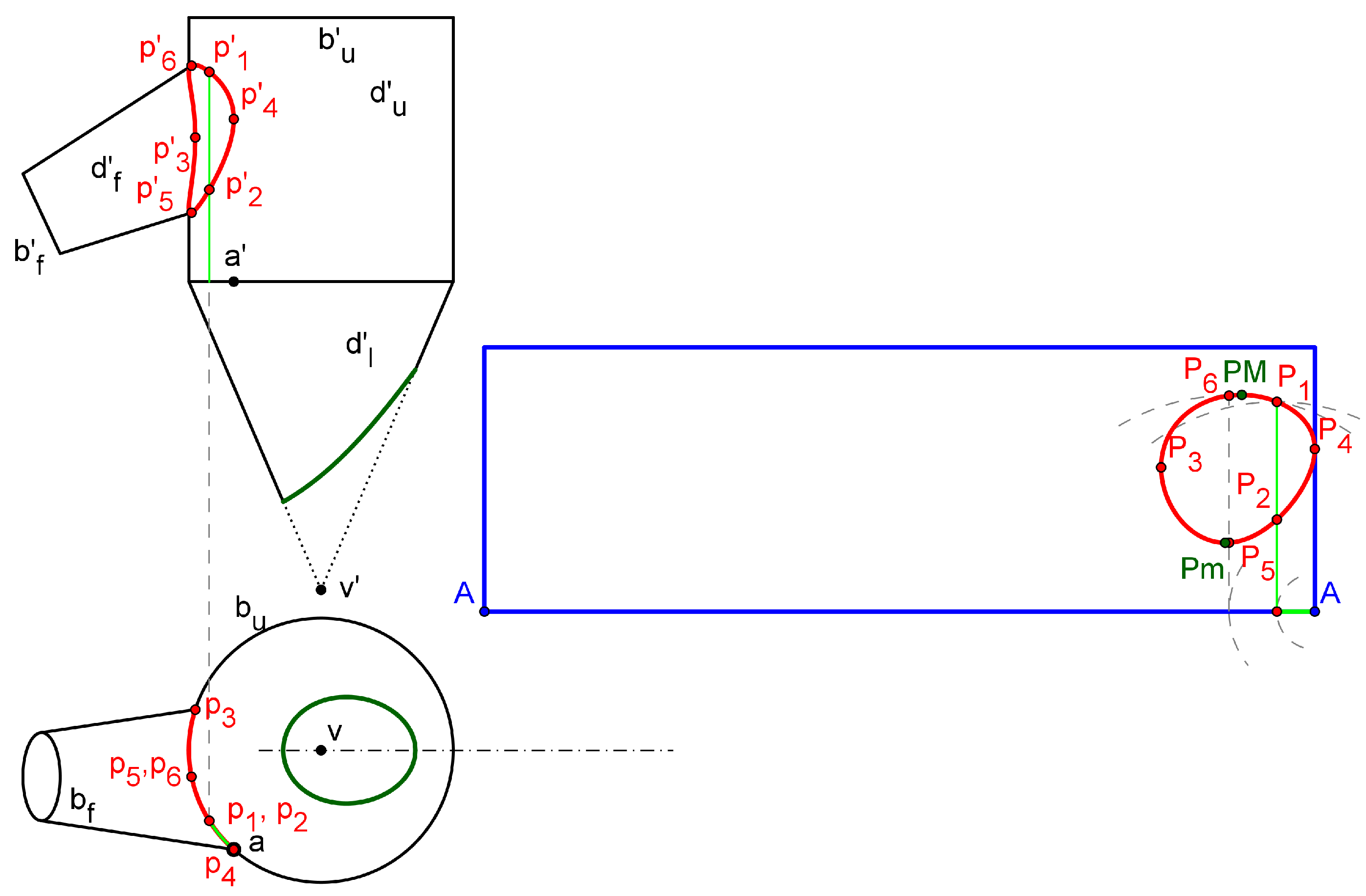
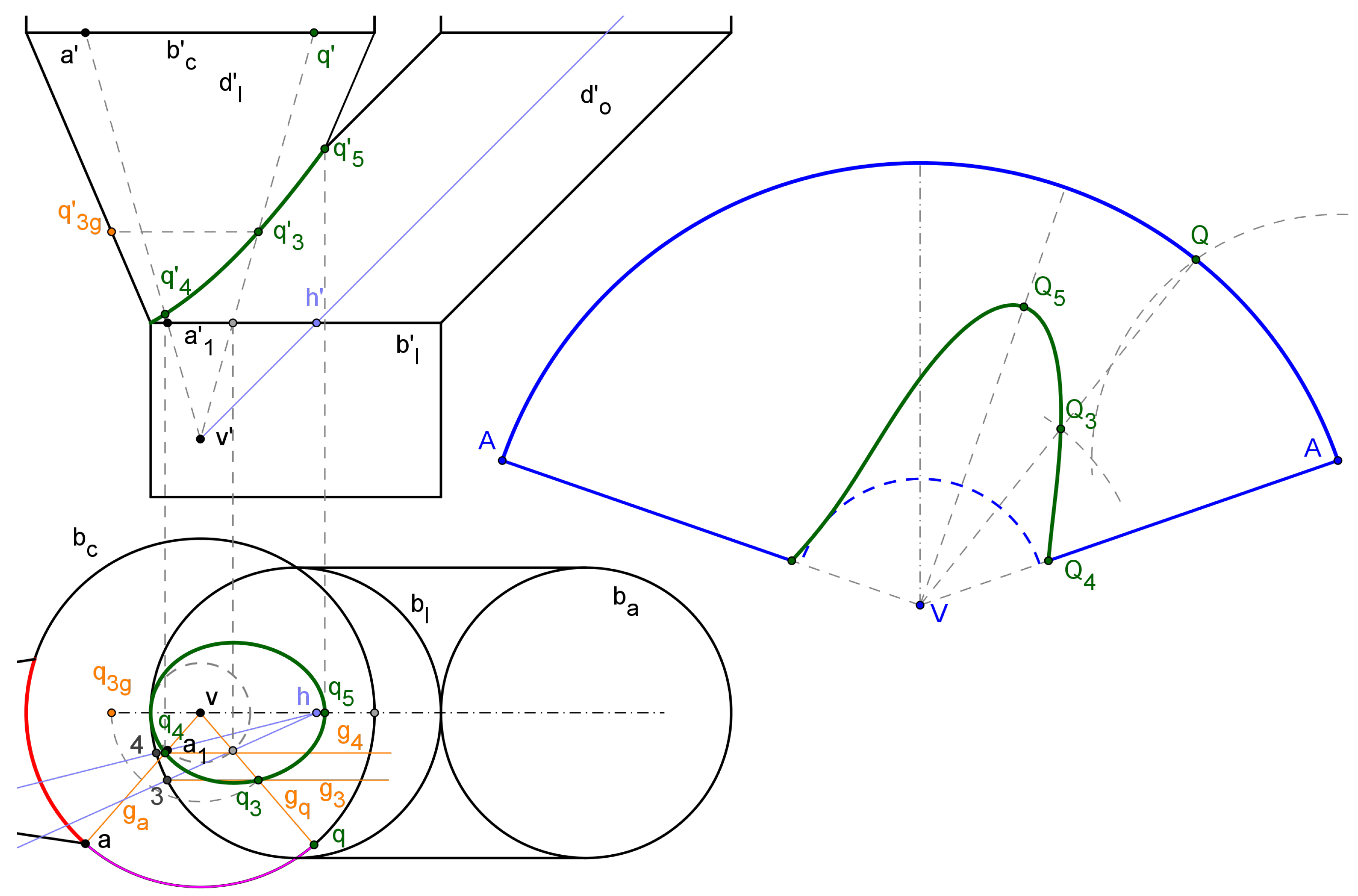
3.1.2. Surface Flattening
3.2. Hopper’s CeDG Modeling
3.3. Hopper’s CAD Modeling
4. Comparative Analysis and Discussion
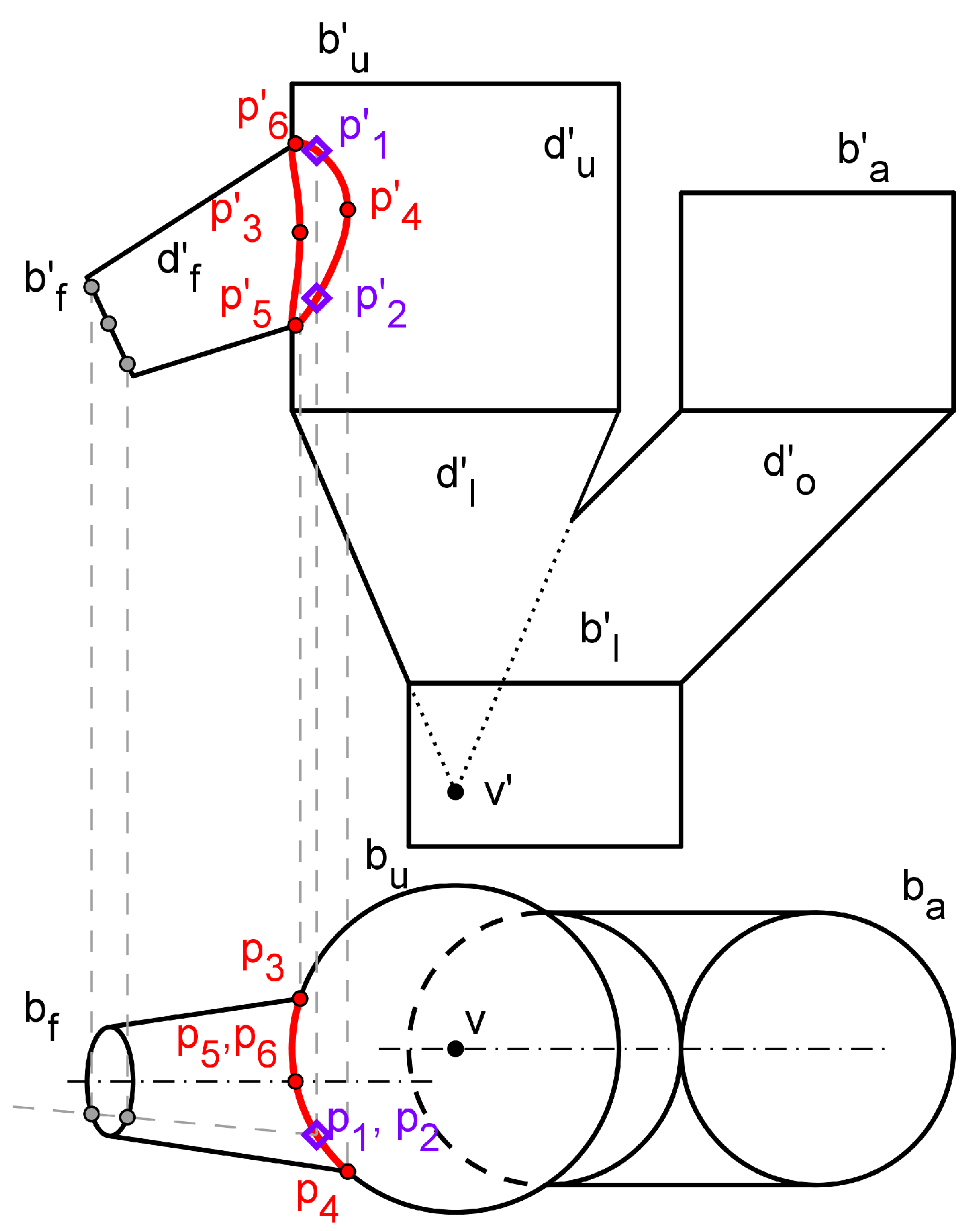
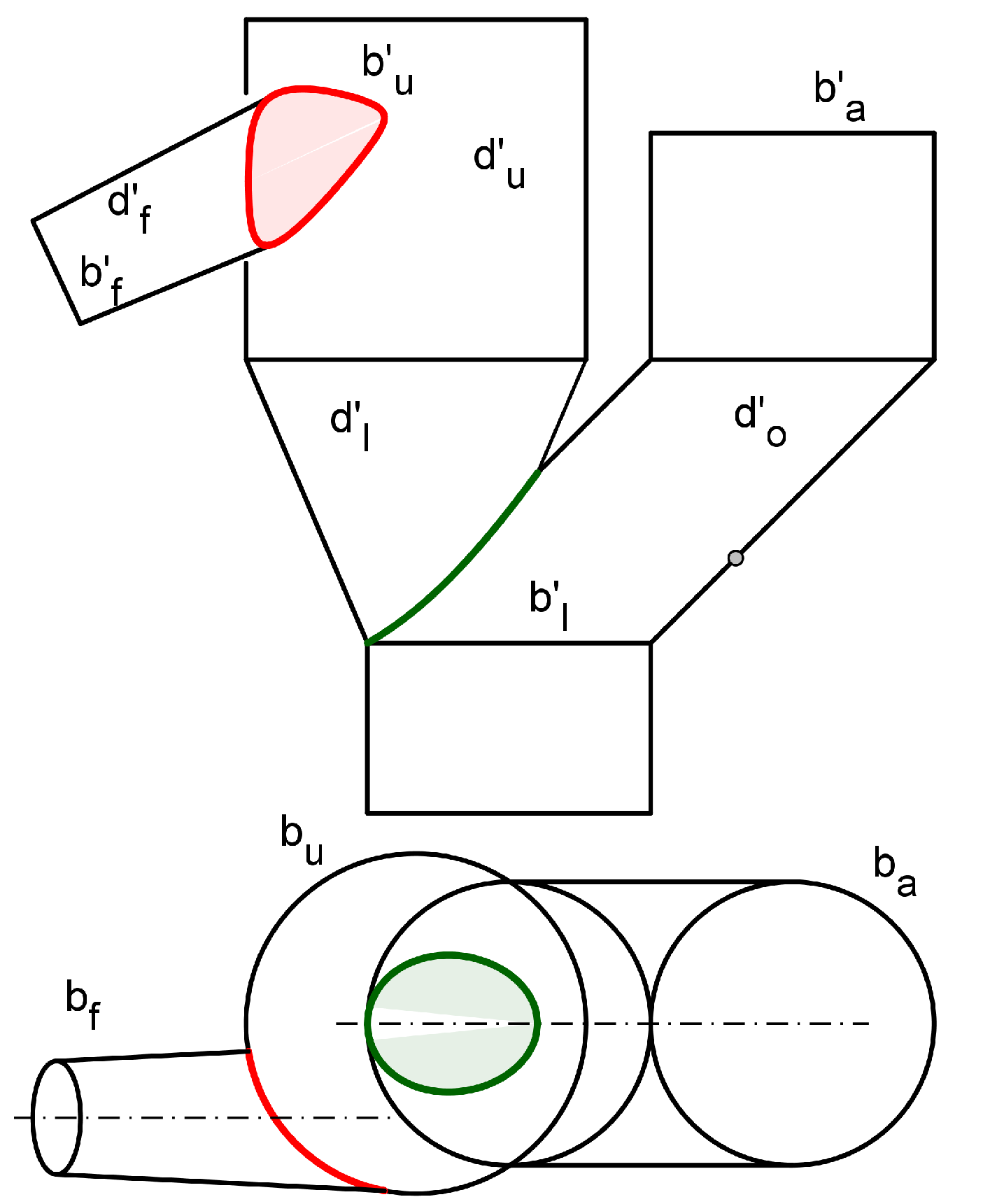
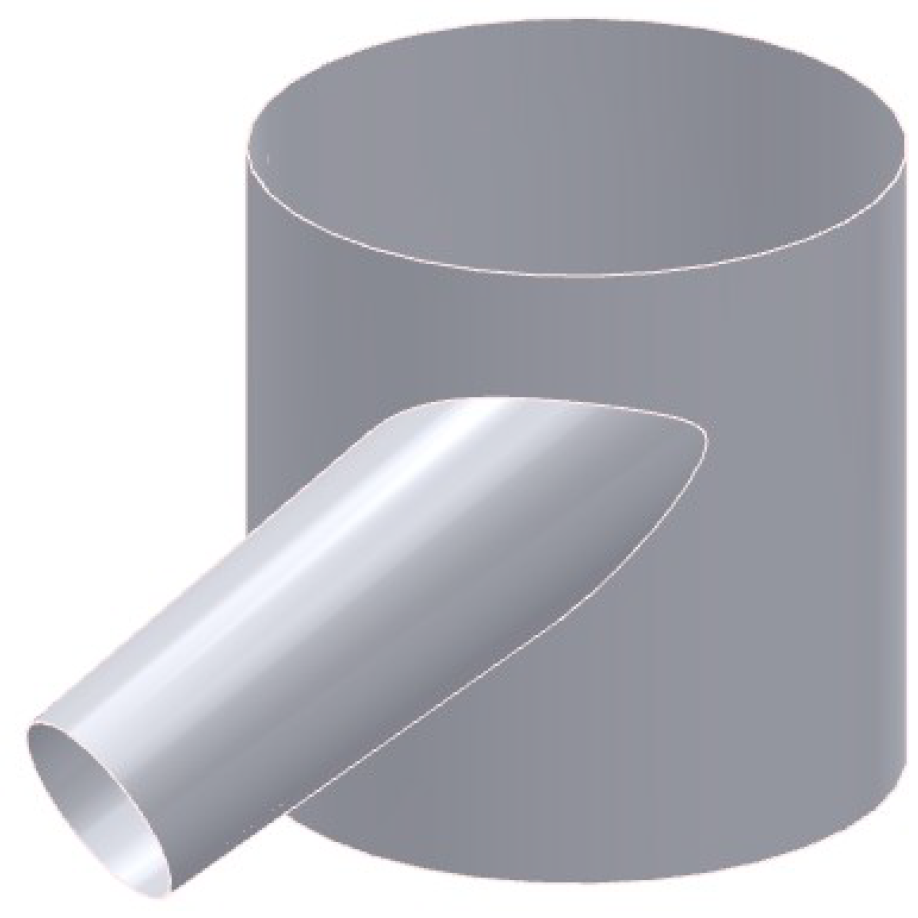
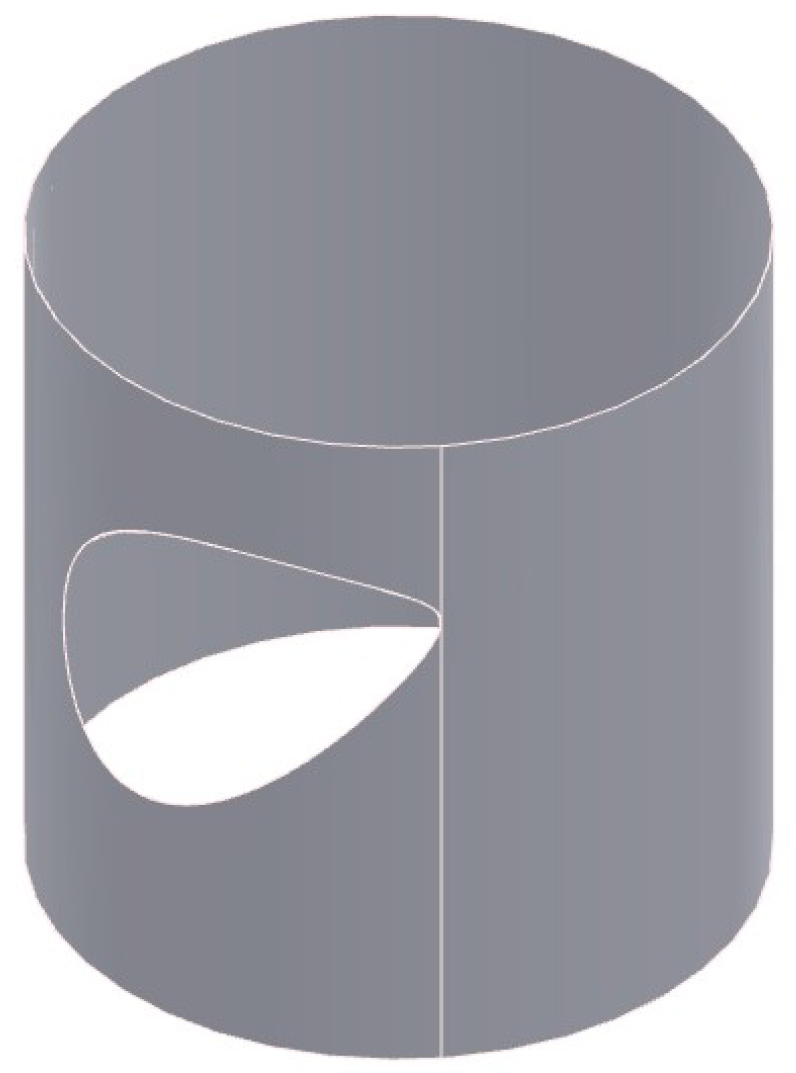
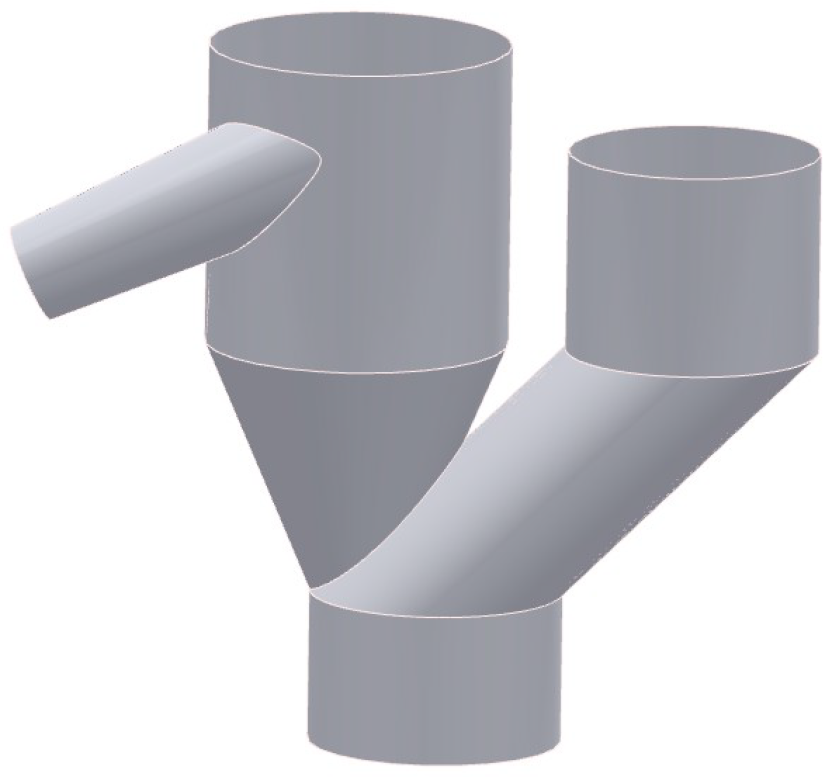
- Feasibility to reach the required models. The 3D model of the hopper that includes the ducts connections was properly obtained both in CeDG and CAD, as shown in Figure 13 and Figure 19. Nonetheless, Solid Edge 2023 was not able to compute the flat pattern of the lower duct (truncated cone) because this duct encounters the oblique cylindrical duct with an intersection of the bite type. We used different strategies, as described in the Section 3, without success.
- Once the 3D models were computed, we tried to use them for the analysis of the influence of the geometrical parameters in the outlet/inlet area ratio of the fluid duct, , and finally for the optimization of the hopper, to achieve in a fast expansion. The CeDG model allowed a visual inspection of the fluid duct—upper duct connection through spatial rotation, as well as the plotting and quantitative computation of the relationship between and any geometrical parameter of the 3D system. We used this feature to plot (Ecc, Con) and select the design values Ecc = 1.66 m and Con = 0.09 (Figure 12b). In opposition, we did not find a direct manner to extract the function in Solid Edge 2023.
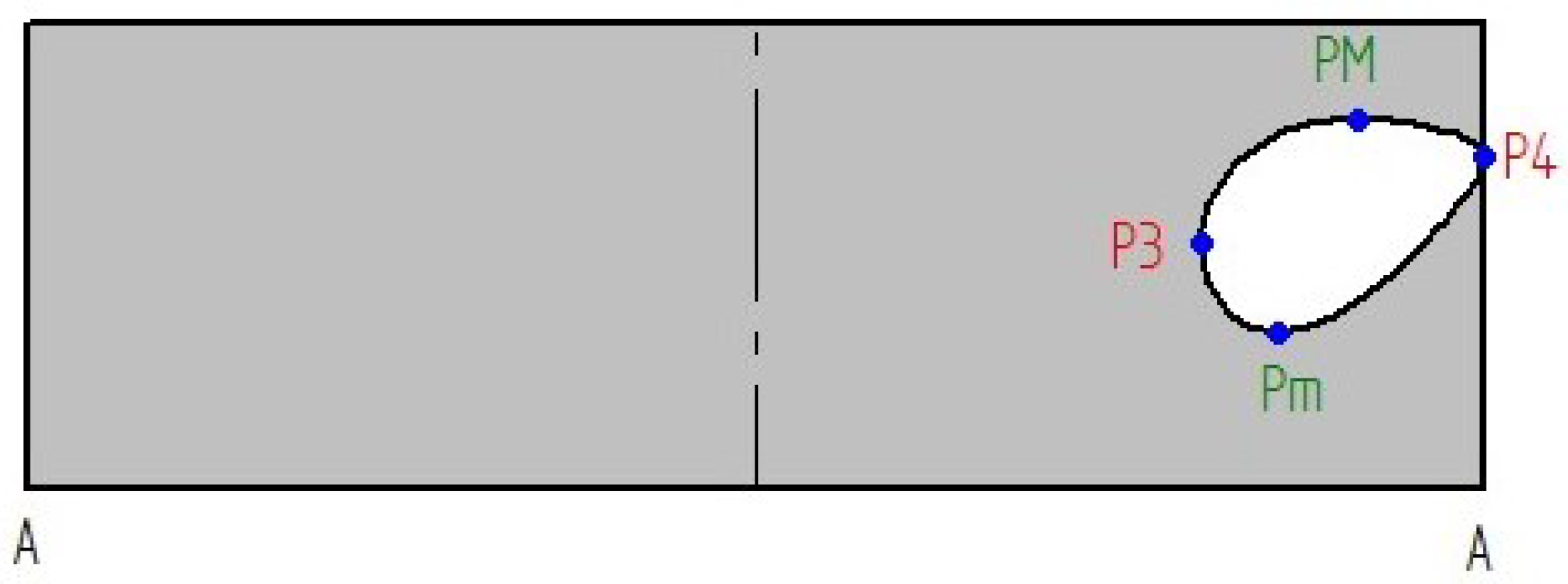
- With respect to accuracy, a comparison between Table 2 and Table 3 shows that the position of − (boundary points) in the flat pattern had relative deviations less than 0.01%. In the case of and , z relative deviations were lower than 0.02%, whereas y relative deviations were lower than 3.9%. The relative deviations between values were lower than 0.6%, with the exception of the value for dimensions’ group, which was 8.7%. Values greater than 5% occurred in those cases where a manual selection of some 3D object was needed. We conclude that the accuracy was high in both models.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Data surfaces for | |
| Curve in 3D space | |
| Distance between A and B points | |
| A (a’ − a) | Spatial (3D) object (vertical projection—horizontal projection) |
| horizontal distance between P and right A points in flat pattern (Figure 10) | |
| vertical distance between P and right A points in flat pattern (Figure 10) | |
| CeDG | Computer extended Descriptive Geometry |
References
- Weisberg, D.E. Computer-Aided Design Strong Roots at MIT. In The Engineering Design Revolution: The People, Companies and Computer Systems That Changed Forever the Practice of Engineering; 2008; Book Section 3; p. 650. Available online: http://cadhistory.net/ (accessed on 2 February 2023).
- Manni, C.; Pelosi, F.; Sampoli, M.L. Generalized B-splines as a tool in isogeometric analysis. Comput. Methods Appl. Mech. Eng. 2011, 200, 867–881. [Google Scholar] [CrossRef]
- Zhang, Y.; Bazilevs, Y.; Goswami, S.; Bajaj, C.L.; Hughes, T.J.R. Patient-specific vascular NURBS modeling for isogeometric analysis of blood flow. Comput. Methods Appl. Mech. Eng. 2007, 196, 2943–2959. [Google Scholar] [CrossRef] [PubMed]
- Xiaohong, J.; Kai, L.; Jinsan, C. Computing the Intersection of Two Rational Surfaces Using Matrix Representations. Comput.-Aided Des. 2022, 150, 103303. [Google Scholar]
- Manocha, D.; Canny, J. A new approach for surface intersection. In Proceedings of the first ACM symposium on Solid Modeling Foundations and CAD/CAM Applications—SMA ’91, Austin, TX, USA, 5–7 June 1991. [Google Scholar] [CrossRef]
- Patrikalakis, N.M. Surface-to-surface intersections. IEEE Comput. Graph. Appl. 1993, 13, 89–95. [Google Scholar] [CrossRef]
- Li, X.; Jiang, H.; Chen, S.; Wang, X. An efficient surface–surface intersection algorithm based on geometry characteristics. Comput. Graph. 2004, 28, 527–537. [Google Scholar] [CrossRef]
- Dejdumrong, N. The Determination of Surface Intersection Using Subdivision and Polyhedron Intersection methods. In Proceedings of the 2nd International Conference on Computer and Automation Engineering (ICCAE), Singapore, 26–28 February 2010. [Google Scholar]
- Busé, L.; Luu Ba, T. The surface/surface intersection problem by means of matrix based representations. Comput. Aided Geom. Des. 2012, 29, 579–598. [Google Scholar] [CrossRef]
- Park, Y.; Son, S.H.; Kim, M.S.; Elber, G. Surface–Surface-Intersection Computation Using a Bounding Volume Hierarchy with Osculating Toroidal Patches in the Leaf Nodes. Comput.-Aided Des. 2020, 127. [Google Scholar] [CrossRef]
- Prado-Velasco, M.; Ortíz Marín, R.; García, L.; Rio-Cidoncha, M.G.D. Graphical Modelling with Computer Extended Descriptive Geometry (CeDG): Description and Comparison with CAD. Comput.-Aided Des. Appl. 2021, 18, 272–284. [Google Scholar] [CrossRef]
- Kortenkamp, U. Foundations of Dynamic Geometry. Ph.D. Thesis, Swiss Federal Institute of Technology, Zurich, Switzerland, 1999. [Google Scholar]
- Croft, F.M. The Need (?) for Descriptive Geometry in a World of 3D Modeling. Eng. Des. Graph. J. 1998, 62, 4–8. [Google Scholar]
- Ortiz-Marín, R.; Del Río-Cidoncha, G.; Martínez-Palacios, J. Where is Descriptive Geometry Heading? In Lecture Notes in Mechanical Engineering; Cavas-Martínez, F., Sanz-Adan, F., Morer Camo, P., Lostado Lorza, R., Santamaría Peña, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2020; pp. 365–373. [Google Scholar] [CrossRef]
- Wottreng, K.A. Computer Methods in Descriptive and Differential Geometry Monge’s Legacy. Ph.D. Thesis, University of Illinois at Chicago, Chicago, IL, USA, 1999. [Google Scholar]
- Hohenwarter, J.; Hohenwarter, M. Geogebra Classic Manual. 2019. Available online: https://wiki.geogebra.org/en/Manual (accessed on 10 February 2023).
- Prado-Velasco, M.; Ortiz-Marín, R. Comparison of Computer Extended Descriptive Geometry (CeDG) with CAD in the Modeling of Sheet Metal Patterns. Symmetry 2021, 13, 685. [Google Scholar] [CrossRef]
- Leighton Wellman, B. Geometría Descriptiva [Technical Descriptive Geometry]; Editorial Reverté, S.A.: Barcelona, Spain, 1987; p. 615. [Google Scholar]
- Kartasheva, E.; Adzhiev, V.; Comninos, P.; Fryazinov, O.; Pasko, A. An Implicit Complexes Framework for Heterogeneous Objects Modelling. In Heterogeneous Objects Modelling and Applications: Collection of Papers on Foundations and Practice; Pasko, A., Adzhiev, V., Comninos, P., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 1–41. [Google Scholar] [CrossRef]
- Prado-Velasco, M.; García-Ruesgas, L. Asociación entre vistas ortográficas y objetos 3D en CeDG: Prueba de concepto (Association between ortographic views and 3D objects in CeDG: Proof of concept). In Innovaciones Educativas en el Ámbito Edificatorio; Editorial Dykinson: Madrid, Spain, 2022; pp. 57–69. ISBN 978-84-1122-751-3. [Google Scholar]
- Gao, X.S.; Hoffmann, C.M.; Yang, W.Q. Solving spatial basic geometric constraint configurations with locus intersection. Comput.-Aided Des. 2004, 36, 111–122. [Google Scholar] [CrossRef]
- Oprea, G.; Ruse, G. A descriptive approach of intersecting geometrical loci—The cylinder case. U.P.B. Sci. Bull. Ser. D 2006, 68, 81–88. [Google Scholar]
- Rojas-Sola, J.I.; Hernández-Díaz, D.; Villar-Ribera, R.; Hernández-Abad, V.; Hernández-Abad, F. Computer-Aided Sketching: Incorporating the Locus to Improve the Three-Dimensional Geometric Design. Symmetry 2020, 12, 1181. [Google Scholar] [CrossRef]
- Hernández-Díaz, D.; Hernández-Abad, F.; Hernández-Abad, V.; Villar-Ribera, R.; Julián, F.; Rojas-Sola, J.I. Computer-Aided Design: Development of a Software Tool for Solving Loci Problems. Symmetry 2022, 15, 10. [Google Scholar] [CrossRef]
- Kovács, Z.; Pech, P. Experiments on Automatic Inclusion of Some Non-degeneracy Conditions Among the Hypotheses in Locus Equation Computations. In Intelligent Computer Mathematics: Proceedings of the 12th International Conference, CICM 2019, Prague, Czech Republic, 8–12 July 2019; Lecture Notes in Computer Science; Springer International Publishing: Berlin/Heidelberg, Germany, 2019; Volume 11617, pp. 140–154. ISBN 978-3-030-23249-8. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dim. Group | Con † | Ecc | df ‡ | do ‡ | |
|---|---|---|---|---|---|
| 0.27 | 0.6 | 2 | 65 | 45 | |
| 0.09 | 1.66 | 2 | 65 | 45 | |
| 0.5 | 1.11 | 0.5 | 50 | 52 | |
| 0.5 | 0 | 0.5 | 50 | 52 | |
| 0.09 | 2.43 | 0.5 | 50 | 52 |
| Dim. Group | ‡ | † | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 3.487 | 3.275 | 3.691 | 1.979 | 1.563 | 1.633 | 4.921 | 5.440 | 51.728 | 3.259 | |
| 3.657 | 3.147 | 4.269 | 2.656 | 2.016 | 1.637 | 4.777 | 5.440 | 39.679 | 3.024 | |
| 3.478 | 2.276 | 4.010 | 2.554 | 0.972 | 0.977 | 4.268 | 7.464 | 44.246 | 56.361 | |
| 2.287 | 2.476 | 2.476 | 1.124 | 0.881 | 1.098 | 3.668 | 7.464 | 62.302 | 31.696 | |
| 2.110 | 2.642 | 4.177 | 1.901 | 2.320 | 0.963 | 4.227 | 7.464 | 38.599 | 15.825 |
| Dim. Group | ‡ | † | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 3.487 | 3.275 | 3.691 | 2.022 | 1.563 | 1.675 | 4.921 | - | - | 3.543 | |
| 3.658 | 3.147 | 4.270 | 2.666 | 2.015 | 1.632 | 4.777 | - | - | 3.003 | |
| 3.478 | 2.276 | 4.009 | 2.551 | 0.971 | 0.981 | 4.268 | - | - | 56.618 | |
| 2.287 | 2.476 | 2.476 | 1.143 | 0.881 | 1.143 | 3.669 | - | - | 31.694 | |
| 2.111 | 2.642 | 4.177 | 1.831 | 2.312 | 0.761 | 4.228 | - | - | 15.930 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Prado-Velasco, M.; García-Ruesgas, L. Intersection and Flattening of Surfaces in 3D Models through Computer-Extended Descriptive Geometry (CeDG). Symmetry 2023, 15, 984. https://doi.org/10.3390/sym15050984
Prado-Velasco M, García-Ruesgas L. Intersection and Flattening of Surfaces in 3D Models through Computer-Extended Descriptive Geometry (CeDG). Symmetry. 2023; 15(5):984. https://doi.org/10.3390/sym15050984
Chicago/Turabian StylePrado-Velasco, Manuel, and Laura García-Ruesgas. 2023. "Intersection and Flattening of Surfaces in 3D Models through Computer-Extended Descriptive Geometry (CeDG)" Symmetry 15, no. 5: 984. https://doi.org/10.3390/sym15050984