

Computational Analysis on the Influence of Normal Force in a Homogeneous Isotropic Microstretch Thermoelastic Diffusive Solid



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Basic Equations
3. Formulation of the Problem
4. Boundary Conditions
5. Applications
6. Particular Cases
7. Inversion of the Transformation
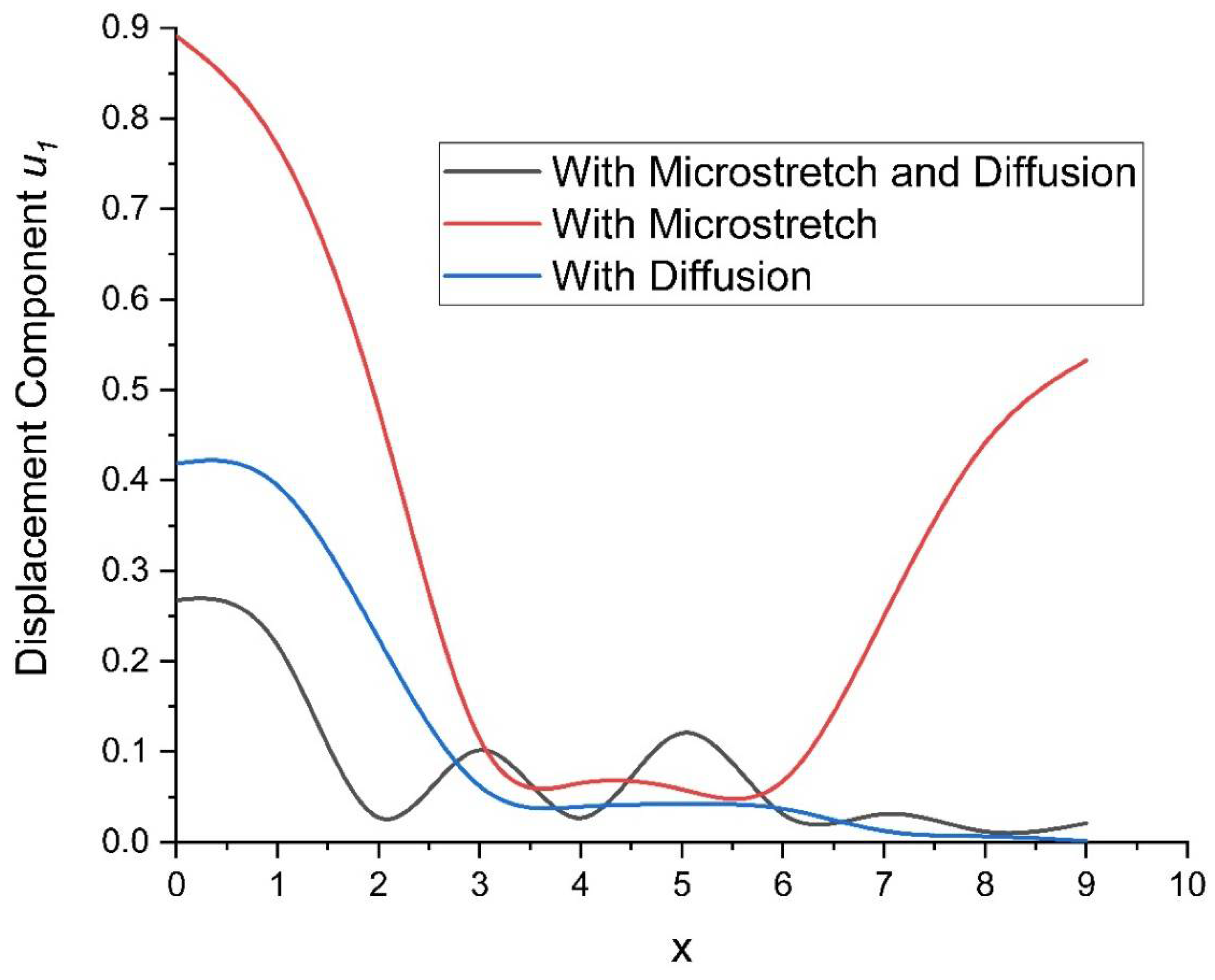
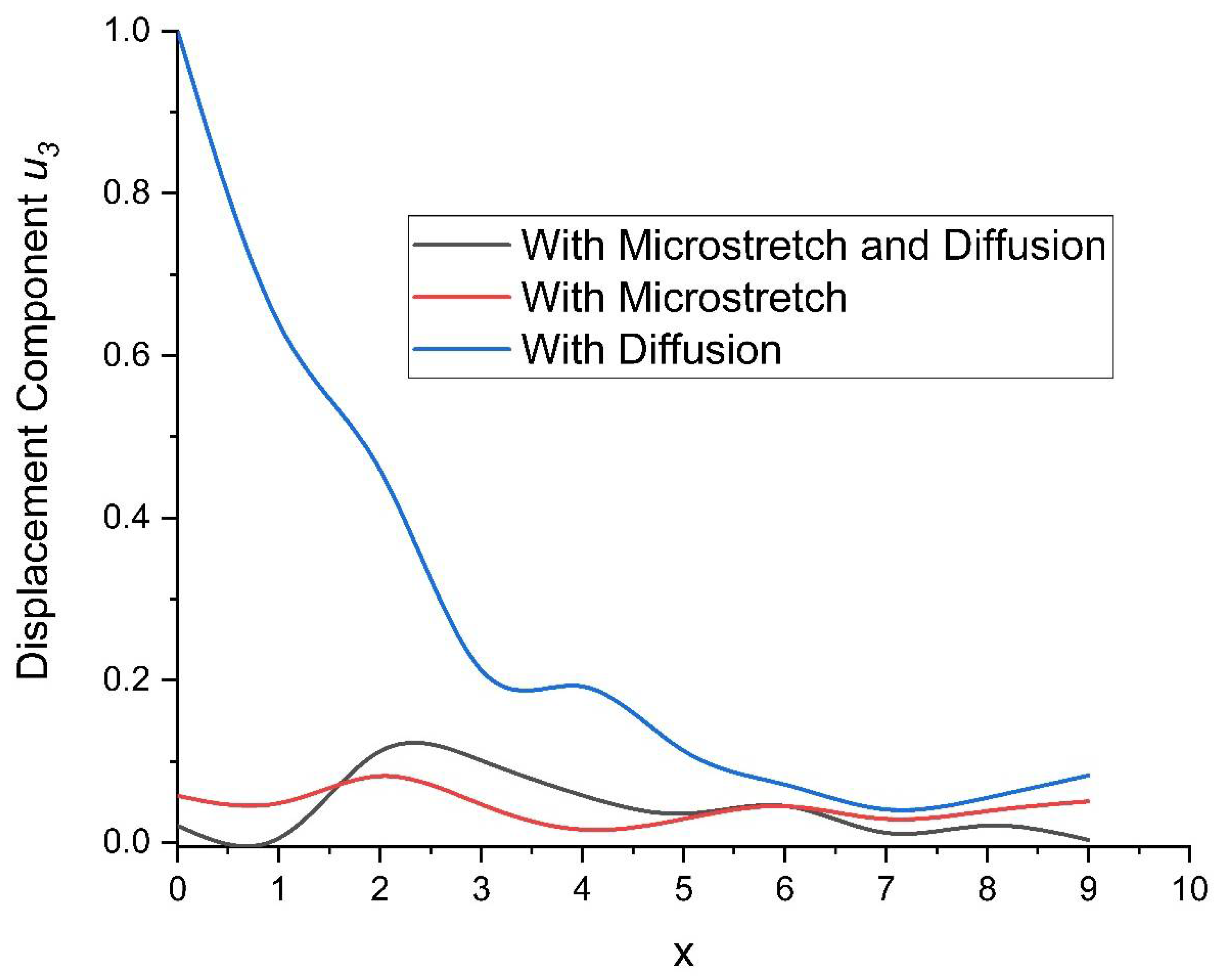
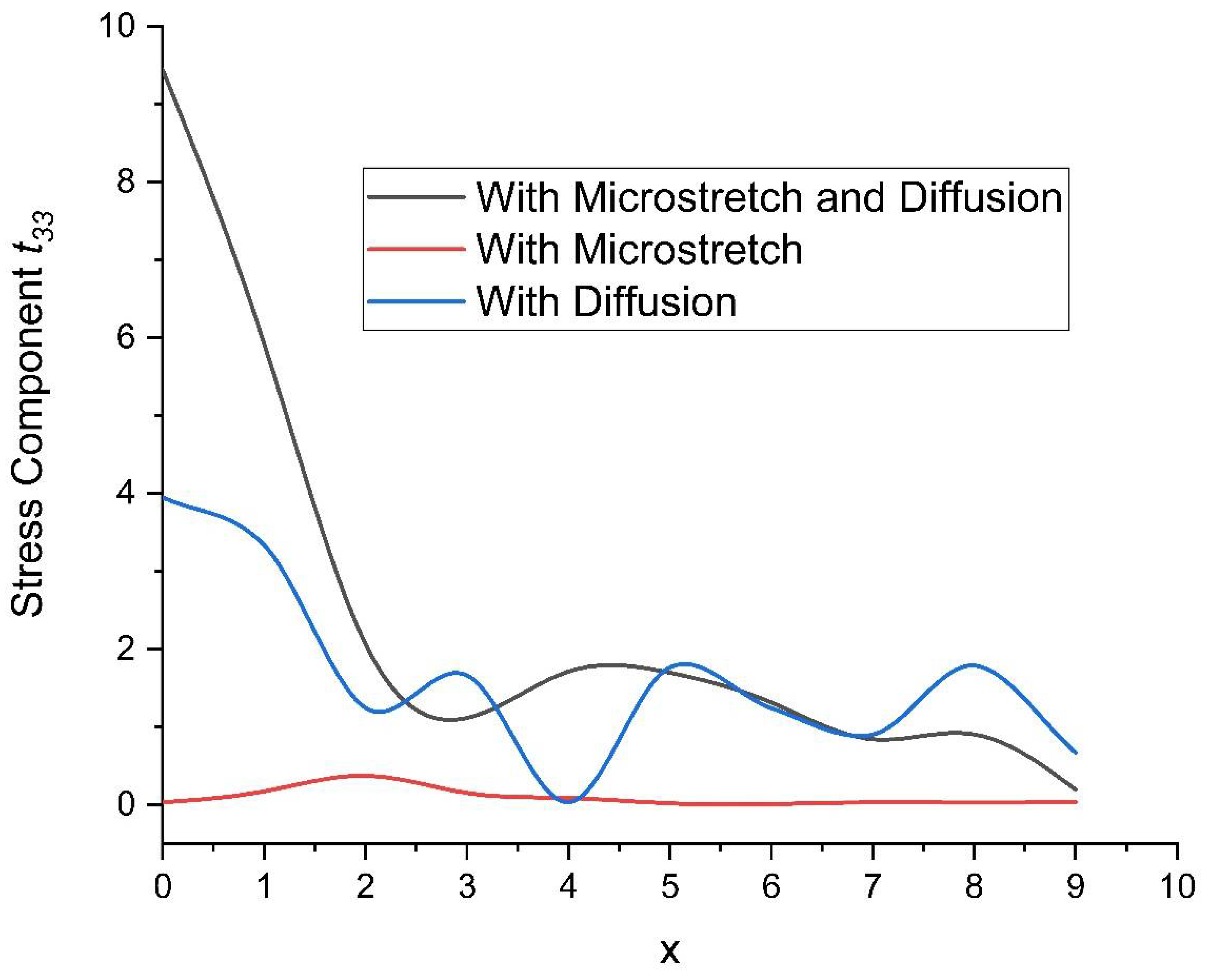
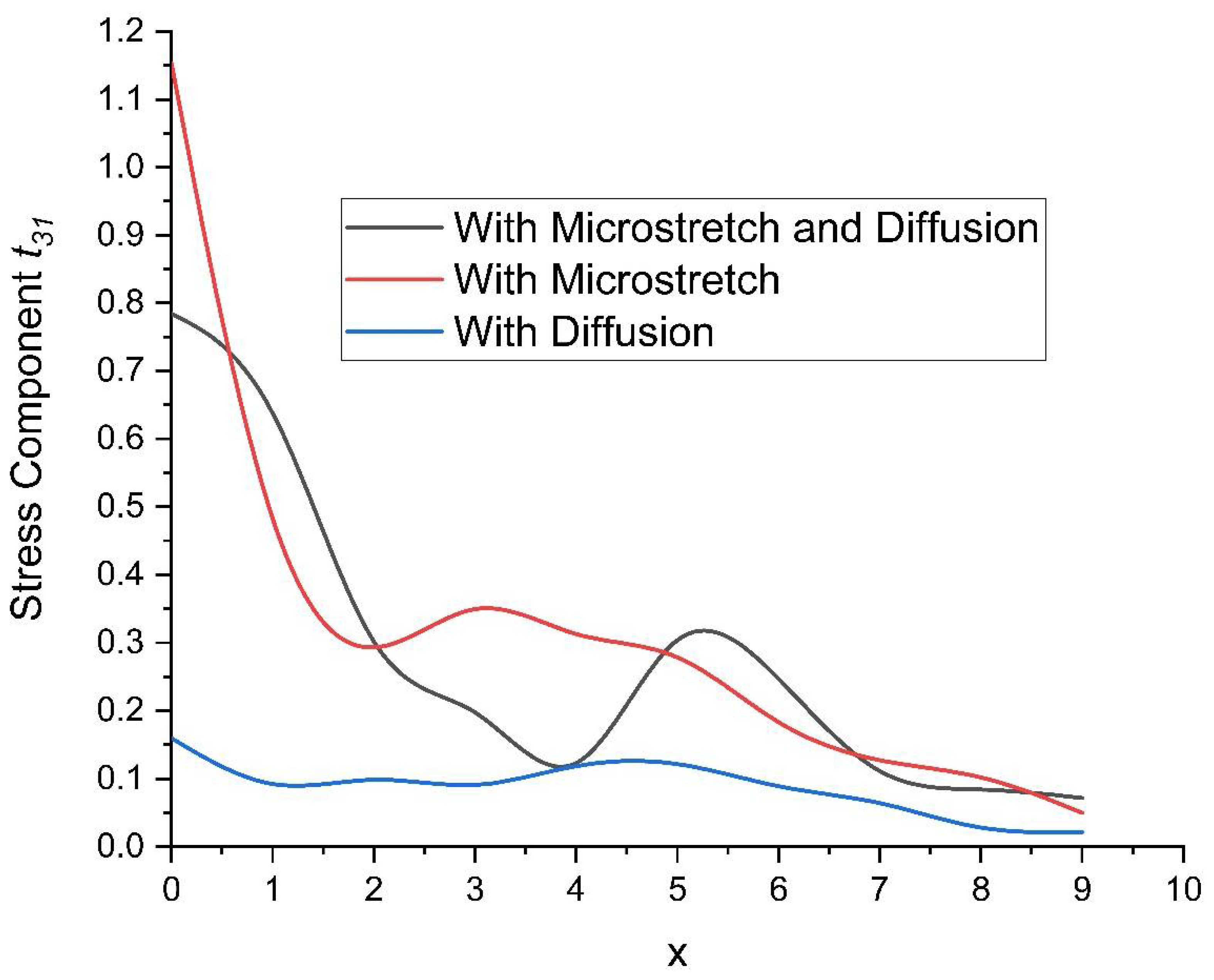
8. Numerical Results and Discussion
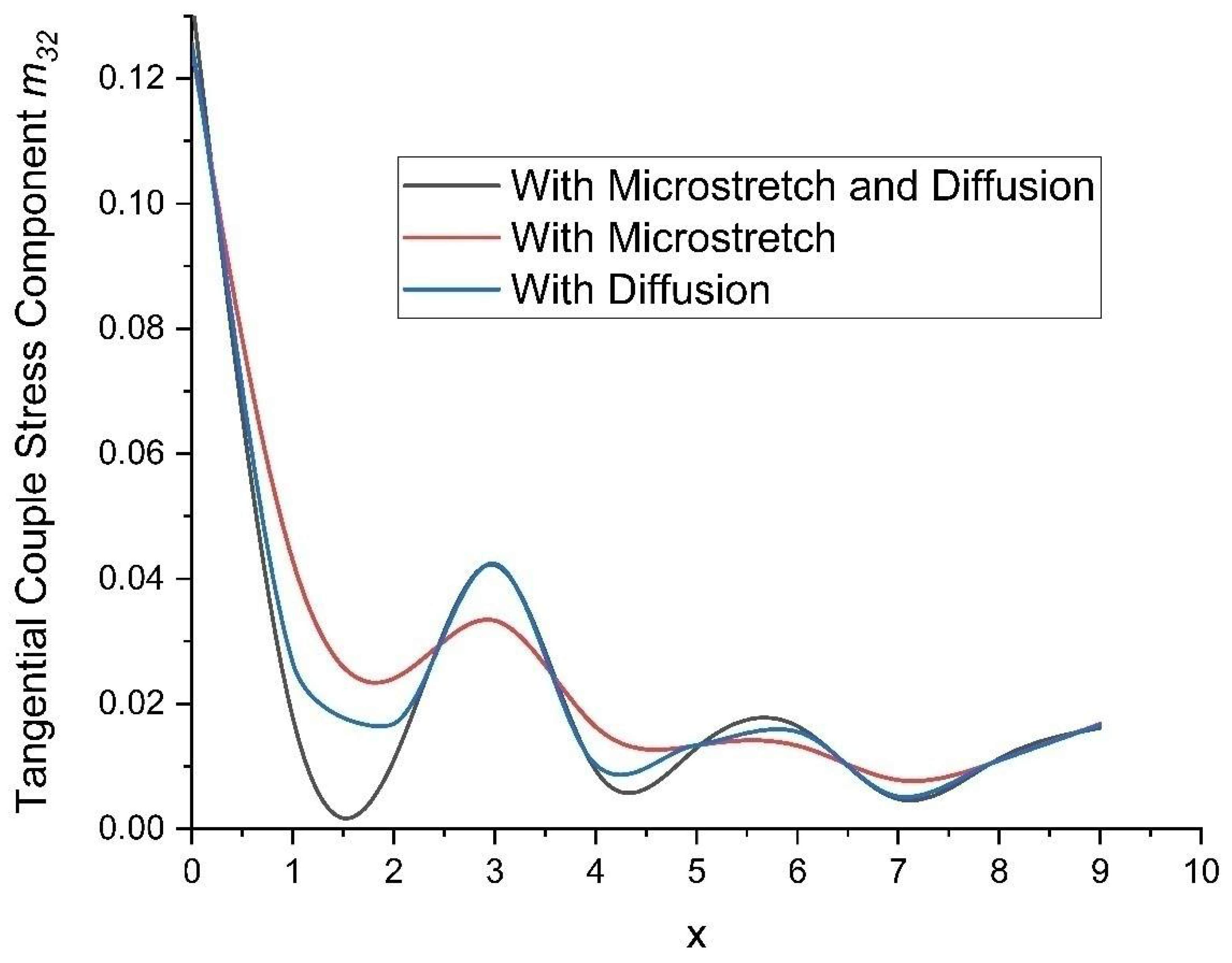
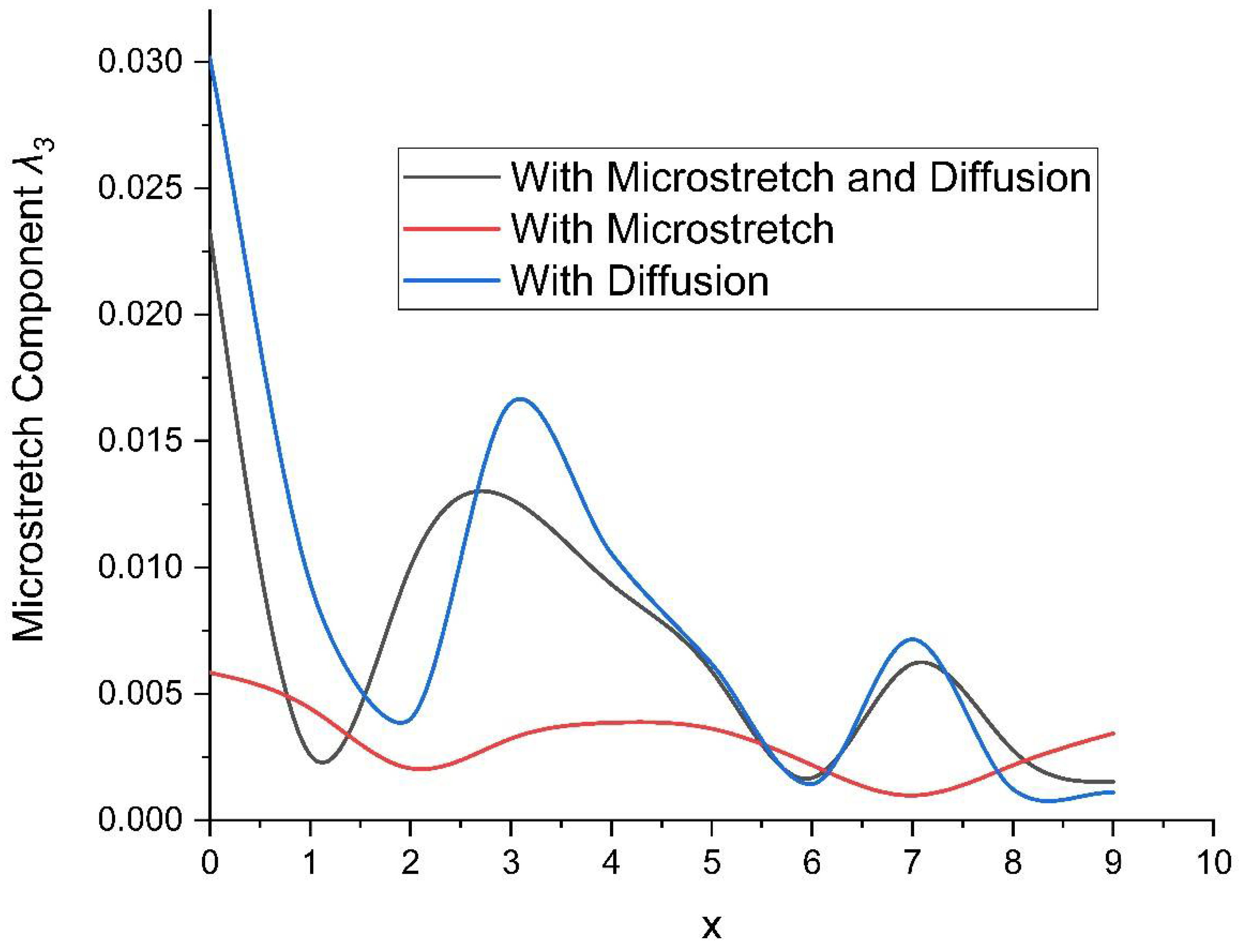
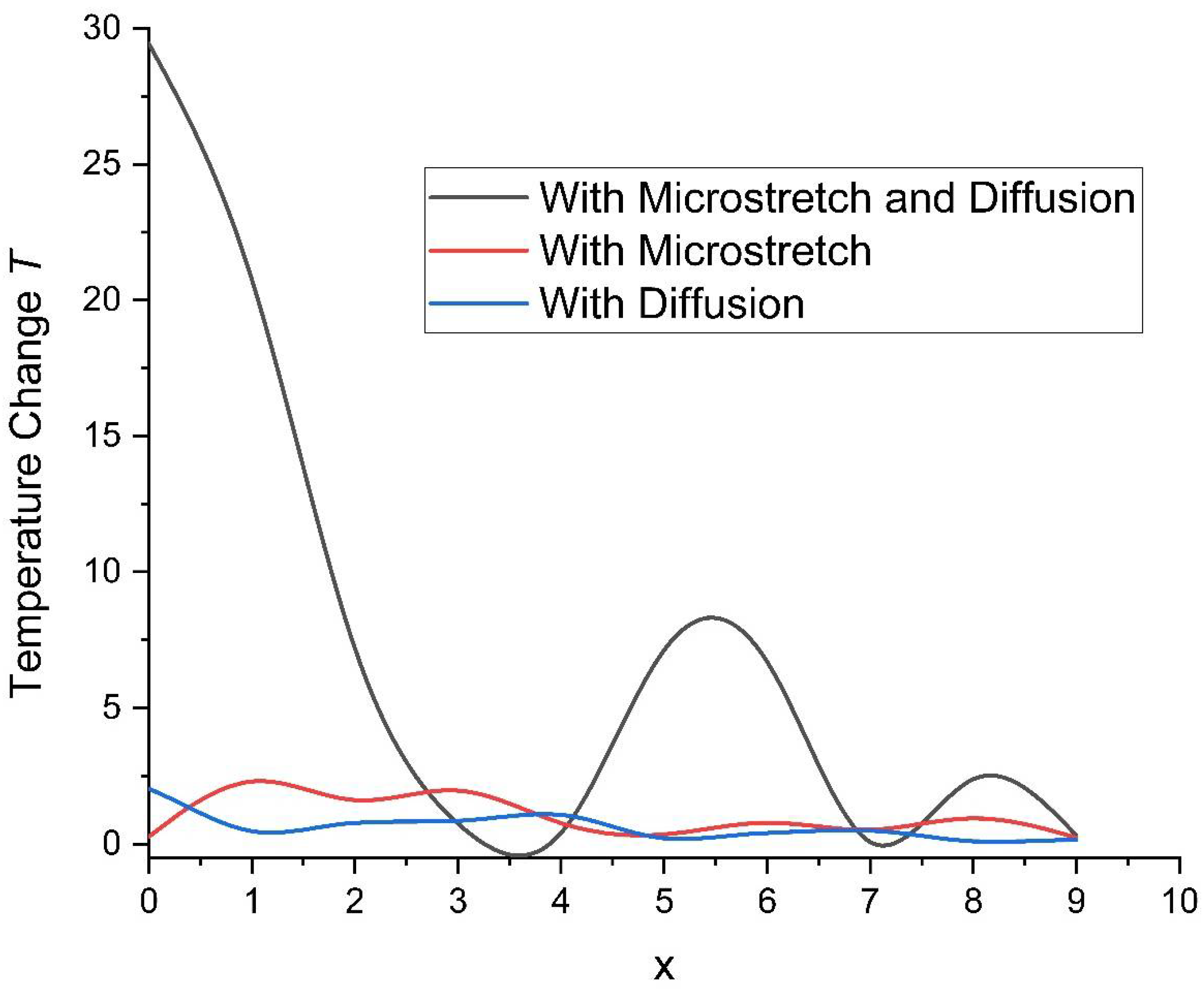
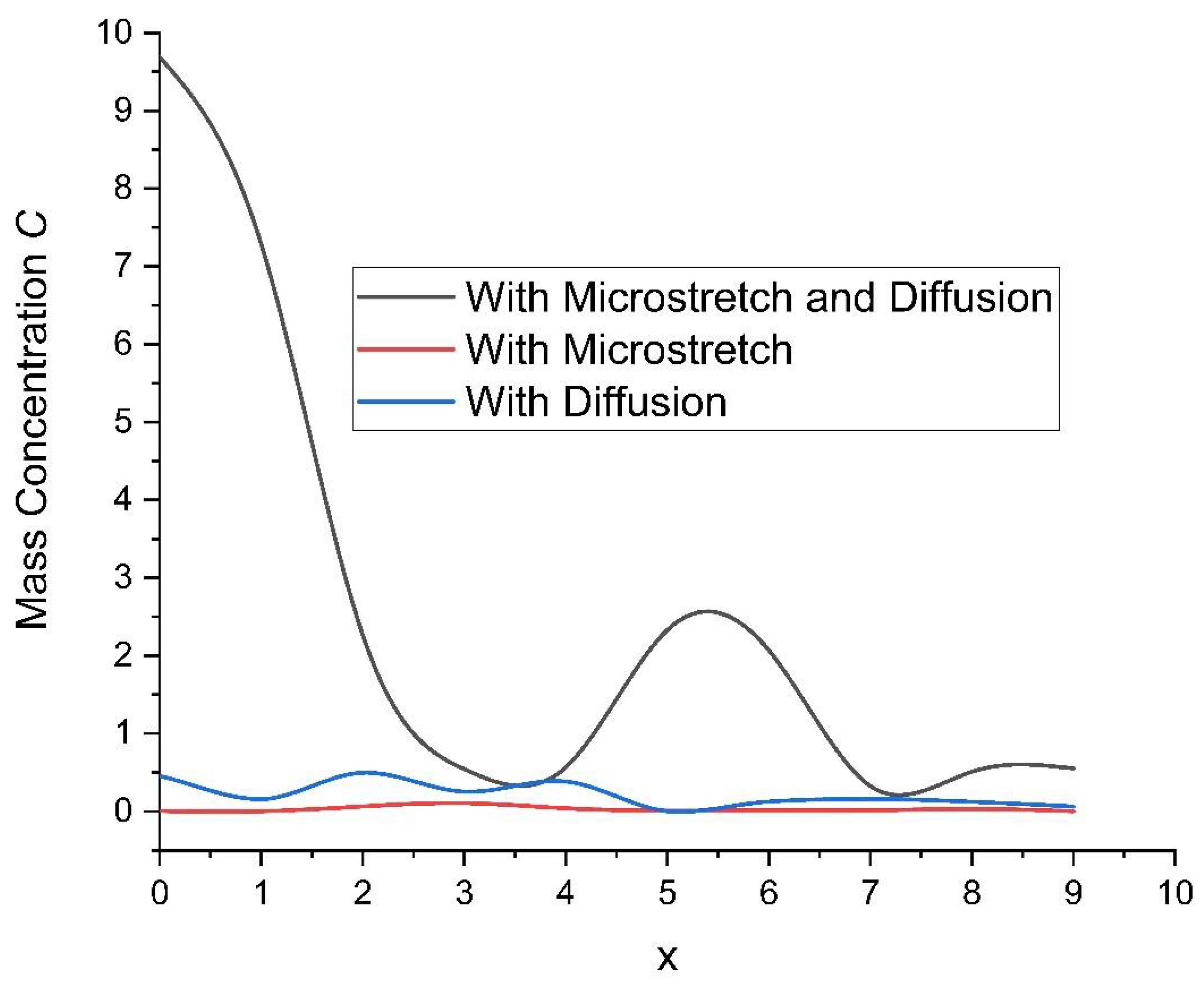
- The black line represents the variations with microstretch and diffusion.
- The red line represents the variations with microstretch neglecting diffusion.
- The blue line represents the variations with diffusion neglecting microstretch.
9. Conclusions
- To estimate the nature of the components of displacement, stresses, temperature change, and microstretch as well as couple stress in the physical domain, an efficient approximate numerical inverse Laplace and Fourier transform technique and Romberg’s integration technique were adopted.
- A comprehensive graphical representation has been provided for a range of variables, detailing the precise effects of mass diffusion and microstretch on thermoelastic deformation through meticulous analysis.
- In the thermo-microstretch theory, the combined effect of microstretch and diffusion is the dominating factor over a single parameter, i.e., microstretch or diffusion.
- It was observed that stress components increase in the microstretch elastic solid with the combined effect of microstretch and diffusion.
- Theoretical analysis and computational findings have substantiated that the impact of mass diffusion and microstretch can amplify the perturbations in the thermoelastic domain.
- The outcome of this problem holds significant value in the realm of two-dimensional dynamic responses, particularly with diverse sources of thermo-diffusion. This phenomenon has numerous applications in both geophysical and industrial domains. The exploration of thermoelasticity is instrumental in enhancing the efficacy of oil extraction processes.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Kronecker delta | Specific heat at constant strain | ||
| Reference temperature | Medium density | ||
| Elastic parameters | Thermal conductivity | ||
| Microrotation vector | Concentration of the diffusion material | ||
| Strain tensors | a | Coefficients of measure of thermo-diffusion effect | |
| Scalar microstretch function | b | Coefficients of mass-diffusion effect | |
| Thermal elastic coupling tensor | Micro-inertia | ||
| Thermoelastic diffusion constant | Couple stress tensors | ||
| Specific heat | Micro-inertia of micro elements | ||
| Linear thermal expansion coefficient | Coefficients of linear thermal expansion | ||
| The coefficients of linear diffusion expansion | Components of stress | ||
| Two-temperature parameter | Temperature change | ||
| Diffusion relaxation times | Displacement components | ||
| Time | Microstress tensor | ||
| Force | Dirac delta function | ||
| Mass transfer coefficient | Dilatation | ||
| Components of strain | Lateral deflection of the beam | ||
| The characteristic frequency of the medium | source distribution function along the x-axis | ||
| Heat transfer coefficient | Microstress tensor |
References
- Eringen, A.C.; Suhubi, E.S. Nonlinear Theory of Simple Micro-Elastic Solids—I. Int. J. Eng. Sci. 1964, 2, 189–203. [Google Scholar] [CrossRef]
- Suhubl, E.S.; Eringen, A.C. Nonlinear Theory of Micro-Elastic Solids—II. Int. J. Eng. Sci. 1964, 2, 389–404. [Google Scholar] [CrossRef]
- Eringen, A.C. A Unified Theory of Thermomechanical Materials. Int. J. Eng. Sci. 1966, 4, 179–202. [Google Scholar] [CrossRef]
- Eringen, A.C. Linear Theory of Micropolar Elasticity. J. Math. Mech. 1966, 15, 909–923. [Google Scholar]
- Eringen, A.C. Theory of Thermo-Microstretch Elastic Solids. Int. J. Eng. Sci. 1990, 28, 1291–1301. [Google Scholar] [CrossRef]
- Nowacki, W. Dynamic Problems of Diffusion in Solids. Eng. Fract. Mech. 1976, 8, 261–266. [Google Scholar] [CrossRef]
- Chandrasekharaiah, D.S. Heat-Flux Dependent Micropolar Thermoelasticity. Int. J. Eng. Sci. 1986, 24, 1389–1395. [Google Scholar] [CrossRef]
- Eringen, A.C. Microcontinuum Field Theories; Springer: New York, NY, USA, 1999; ISBN 978-1-4612-6815-4. [Google Scholar]
- Singh, B.; Kumar, R. Wave Propagation in a Generalized Thermo-Microstretch Elastic Solid. Int. J. Eng. Sci. 1998, 36, 891–912. [Google Scholar] [CrossRef]
- Kumar, R.; Partap, G. Analysis of Free Vibrations for Rayleigh—Lamb Waves in a Microstretch Thermoelastic Plate with Two Relaxation Times. J. Eng. Phys. Thermophys. 2009, 82, 35–46. [Google Scholar] [CrossRef]
- Kumar, R.; Kansal, T. Fundamental Solution in the Theory of Thermomicrostretch Elastic Diffusive Solids. ISRN Appl. Math. 2011, 2011, 764632. [Google Scholar] [CrossRef]
- Boschi, E.; Ieşan, D. A Generalized Theory of Linear Micropolar Thermoelasticity. Meccanica 1973, 8, 154–157. [Google Scholar] [CrossRef]
- Mindlin, R.D. Equations of High Frequency Vibrations of Thermopiezoelectric Crystal Plates. Int. J. Solids Struct. 1974, 10, 625–637. [Google Scholar] [CrossRef]
- Ciarletta, M. A Theory of Micropolar Thermoelasticity without Energy Dissipation. J. Therm. Stress. 1999, 22, 581–594. [Google Scholar] [CrossRef]
- Aouadi, M. The Coupled Theory of Micropolar Thermoelastic Diffusion. Acta Mech. 2009, 208, 181–203. [Google Scholar] [CrossRef]
- Aouadi, M. Theory of Generalized Micropolar Thermoelastic Diffusion Under Lord–Shulman Model. J. Therm. Stress. 2009, 32, 923–942. [Google Scholar] [CrossRef]
- Aouadi, M. Aspects of Uniqueness in Micropolar Piezoelectric Bodies. Math. Mech. Solids 2008, 13, 499–512. [Google Scholar] [CrossRef]
- El-Karamany, A.S.; Ezzat, M.A. Uniqueness and Reciprocal Theorems in Linear Micropolar Electro-Magnetic Thermoelasticity with Two Relaxation Times. Mech. Time-Depend. Mater. 2009, 13, 93–115. [Google Scholar] [CrossRef]
- Marin, M.; Baleanu, D. On mixed problem in thermos-elasticity of type III for Cosserat media. J. Taibah Univ. Sci. 2022, 16, 1264–1274. [Google Scholar] [CrossRef]
- Groza, G.; Khan, S.A.; Pop, N. Approximate solutions of boundary value problems for ODEs using Newton interpolating series. Carpathian J. Math. 2009, 25, 73–81. [Google Scholar]
- Modrea, A.; Vlase, S.; Calin, M.R.; Peterlicean, A. The influence of dimensional and structural shifts of the elastic constant values in cylinder fiber composites, J. Optoelectron. Adv. Mater. 2013, 15, 278–283. [Google Scholar]
- Abo-Dahab, S.M.; Abouelregal, A.E.; Marin, M. Generalized Thermoelastic Functionally Graded on a Thin Slim Strip Non-Gaussian Laser Beam. Symmetry 2020, 12, 1094. [Google Scholar] [CrossRef]
- Vlase, S.; Teodorescu-Drăghicescu, H.; Calin, M.R.; Scutaru, M.L. Advanced Polylite composite laminate material behavior to tensile stress on weft direction. J. Optoelectron. Adv. Mater. 2012, 14, 658–663. [Google Scholar]
- Abbas, I.; Hobiny, A.; Marin, M. Photo-thermal interactions in a semi-conductor material with cylindrical cavities and variable thermal conductivity. J. Taibah Univ. Sci. 2020, 14, 1369–1376. [Google Scholar] [CrossRef]
- Malik, S.; Gupta, D.; Kumar, K.; Sharma, R.K.; Jain, P. Reflection and Transmission of Plane Waves in Nonlocal Generalized Thermoelastic Solid with Diffusion. Mech. Solids 2023, 58, 161–188. [Google Scholar] [CrossRef]
- Trivedi, N.; Das, S.; Craciun, E.-M. The Mathematical Study of an Edge Crack in Two Different Specified Models under Time-Harmonic Wave Disturbance. Mech. Compos. Mater. 2022, 58, 1–14. [Google Scholar] [CrossRef]
- Marin, M. On the minimum principle for dipolar materials with stretch. Nonlinear Anal. Real World Appl. 2009, 10, 1572–1578. [Google Scholar] [CrossRef]
- Gupta, S.; Das, S.; Dutta, R.; Verma, A.K. Higher-Order Fractional and Memory Response in Nonlocal Double Poro-Magneto-Thermoelastic Medium with Temperature-Dependent Properties Excited by Laser Pulse. J. Ocean Eng. Sci. 2022. [Google Scholar] [CrossRef]
- Zhu, Z.Y.; Liu, Y.L.; Gou, G.Q.; Gao, W.; Chen, J. Effect of Heat Input on Interfacial Characterization of the Butter Joint of Hot-Rolling CP-Ti/Q235 Bimetallic Sheets by Laser + CMT. Sci. Rep. 2021, 11, 10020. [Google Scholar] [CrossRef]
- Pop, N. A Finite Element Solution for a Three-dimensional Quasistatic frictional Contact Problem. Rev. Roum. Des Sci. Tech. Ser. Mec. Appliq. 1997, 42, 209–218. [Google Scholar]
- Chen, W.; Hou, H.; Zhang, Y.; Liu, W.; Zhao, Y. Thermal and Solute Diffusion in α-Mg Dendrite Growth of Mg-5wt.%Zn Alloy. J. Mater. Res. Technol. 2023, 24, 8401–8413. [Google Scholar] [CrossRef]
- Kaur, I.; Singh, K. Rayleigh Wave Propagation in Transversely Isotropic Magneto-Thermoelastic Diffusive Medium with Memory-Dependent Derivatives. Iran. J. Sci. Technol. Trans. Mech. Eng. 2023, 47, 2089–2100. [Google Scholar] [CrossRef]
- Kaur, I.; Singh, K. Functionally Graded Nonlocal Thermoelastic Nanobeam with Memory-Dependent Derivatives. SN Appl. Sci. 2022, 4, 329. [Google Scholar] [CrossRef]
- Jafari, M.; Chaleshtari, M.H.B.; Abdolalian, H.; Craciun, E.-M.; Feo, L. Determination of Forces and Moments Per Unit Length in Symmetric Exponential FG Plates with a Quasi-Triangular Hole. Symmetry 2020, 12, 834. [Google Scholar] [CrossRef]
- Othman, M.I.; Fekry, M.; Marin, M. Plane waves in generalized magneto-thermo-viscoelastic medium with voids under the effect of initial stress and laser pulse heating. Struct. Eng. Mech. 2020, 73, 621–629. [Google Scholar]
- Marin, M. Some estimates on vibrations in thermoelasticity of dipolar bodies. J. Vib. Control 2020, 16, 33–47. [Google Scholar] [CrossRef]
- Kuang, W.; Wang, H.; Li, X.; Zhang, J.; Zhou, Q.; Zhao, Y. Application of the Thermodynamic Extremal Principle to Diffusion-Controlled Phase Transformations in Fe-C-X Alloys: Modeling and Applications. Acta Mater. 2018, 159, 16–30. [Google Scholar] [CrossRef]
- Honig, G.; Hirdes, U. A Method for the Numerical Inversion of Laplace Transforms. J. Comput. Appl. Math. 1984, 10, 113–132. [Google Scholar] [CrossRef]
- Press, W.H.; Teukolsky, S.A.; Vetterling, W.T.; Flannery, B.P. Numerical Recipes in Fortran; Cambridge University Press: Cambridge, UK, 1980. [Google Scholar]
- Eringen, A.C. Plane Waves in Nonlocal Micropolar Elasticity. Int. J. Eng. Sci. 1984, 22, 1113–1121. [Google Scholar] [CrossRef]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Singh, K.; Kaur, I.; Marin, M. Computational Analysis on the Influence of Normal Force in a Homogeneous Isotropic Microstretch Thermoelastic Diffusive Solid. Symmetry 2023, 15, 2095. https://doi.org/10.3390/sym15122095
Singh K, Kaur I, Marin M. Computational Analysis on the Influence of Normal Force in a Homogeneous Isotropic Microstretch Thermoelastic Diffusive Solid. Symmetry. 2023; 15(12):2095. https://doi.org/10.3390/sym15122095
Chicago/Turabian StyleSingh, Kulvinder, Iqbal Kaur, and Marin Marin. 2023. "Computational Analysis on the Influence of Normal Force in a Homogeneous Isotropic Microstretch Thermoelastic Diffusive Solid" Symmetry 15, no. 12: 2095. https://doi.org/10.3390/sym15122095