1. Introduction
Since the concept of fuzzy sets (FSs) proposed by Zadeh [
1] is quite powerful in expressing and dealing with imprecise and uncertain information, there are fruitful research results both in theory and application. It is well known that fuzzy modus ponens (FMP) and fuzzy modus tollens (FMT) are the two basic inference models of fuzzy approximate reasoning. The composition rule of inference (CRI) introduced by Zadeh [
2] is a very widespread and important reasoning principle for the basic models FMP and FMT.
Although the CRI of approximate reasoning has been successfully applied in many fields [
3,
4,
5,
6], it should be admitted that CRI method lacks a logical foundation as Wang pointed out in [
7]. Wang proposed the triple I method (TIM) to provide a logical principle of reasonableness for fuzzy inference [
7,
8]. TIM soon attracted the attention of researchers and became an significant method to deal with the issues related to FMP and FMT [
8,
9,
10,
11,
12,
13,
14,
15,
16,
17,
18]. Liu and Wang [
9] studied the properties of TIM concerning sustaining degrees. Pei [
11] proposed a first order logic deduce system based on the unified TIM. Tang generalized TIM to the symmetric implication method in [
13] and advanced a novel symmetric implication method on the strength of two-dimensional sustaining degree [
14]. Zhou gave a new solution formula of TIM based on law of importation and flexible ordering property in [
18].
The concept of interval valued fuzzy sets (IVFSs) presented by Zadeh [
19] is a generalization of fuzzy sets. It generalizes the membership degree from a singleton to an interval in the unit interval, which represent unknown or ill-known information. The concept of intuitionistic fuzzy sets (IFSs) proposed by Atanassov [
20] is another generalization of fuzzy sets. It is given by a pair of fuzzy sets, which provides the membership degree and the non-membership degree, respectively. They represent validity and falsity of the given information. IVFSs and IFSs are isomorphic in math, but their motivations and circumstances are different. They provide more possible semantic interpretations for uncertain information, so the theory of IFSs has been applied in wide fields, such as approximate reasoning, decision making, clustering analysis, data mining, and so on [
21,
22,
23,
24,
25,
26,
27,
28].
IFMP (intuitionistic fuzzy modus ponens) and IFMT ( (intuitionistic fuzzy modus tollens) are the extensions of FMP and FMT in the intuitionistic fuzzy environment, respectively. The essential principles of the CRI method and TIM have been used to solve IFMP and IFMT problems of intuitionistic fuzzy reasoning. The CRI method for intuitionistic fuzzy reasoning was explored in [
29]. Zheng et al. [
30] extended TIM for intuitionistic fuzzy reasoning and explored the reversibility of TIM for IFMP and IFMT. Concerning the issue on the deficiency of reversibility for TIM in IFMT, Liu and Zheng [
31] presented a dual approximate reasoning method of TIM for IFMT. Zheng and Liu [
32] advanced TIM for multiple-rules systems with intuitionistic fuzzy information.
For FMP and IFMP problems, the reasoning models coincide as follows:
The fuzzy propositions are represented by the fuzzy sets. The type of sets is unitary, i.e., they are all FSs and IFSs in FMP and IFMP, respectively. In the process of fuzzy inference, “if-then” rule can be identified as a fuzzy implication operator and an intuitionistic fuzzy implication operator in FMP and IFMP, respectively.
That is to say, model (1) can be considered as a generalized modus ponens (GMP) model. The solution is determined by the information . In fact, the real world is full of all kinds of information, even heterogeneous information. Moreover, the variability of information will lead to confounding of inference rules. How can we represent the mechanism of our reasoning and decision-making in a mixed information environment? It is always a very valuable and challenging topic. Our motivation is to explore fuzzy reasoning in a kind of mixed information environment under the frame of GMP.
From the perspective of information diversity, we suppose that
are alternative in fuzzy sets or intuitionistic fuzzy sets separately rather than simultaneously. Obviously, by listing all possible types of
we can obtain eight possibilities, according to
Table 1 (F denotes fuzzy set, IF denotes intuitionistic fuzzy set).
As can be seen in
Table 1, type 1 of GMP is FMP and type 2 of GMP is IFMP. In these two cases, the former
P and the rear
Q coincide in the type of information, as well as the two formers
P and
. In type 3 and type 4 of GMP, the former
P and the rear
Q coincide, but the two formers
P and
do not. In type 5 and type 6 of GMP, the two formers
P and
coincide, but the former
P and the rear
Q do not. In type 7 and type 8 of GMP, the former
P and the rear
Q do not coincide, neither do the two formers
P and
. The aim of our paper is how to obtain the solutions of the rest six types of GMP by selecting the solving models based on basic models FMP and IFMP.
2. Preliminaries
Here we review the main concepts and results, which are necessary for our subsequent developments.
Definition 1 ([
33])
. A t-norm is a binary operation such that ⊗ is commutative, associative, monotonic and has the identity 1. A t-conorm is a binary operation such that ⊕ is commutative, associative, monotonic, and has the identity 0.A pair is called a dual pair of t-norm ⊗ and t-conorm if . Analogously, .
Definition 2 ([
8,
30,
33])
. Let be two binary operation on [0,1], is called an adjoint pair if the residual principle holds→ is called the residuum of ⊗.Let be a two binary operation on [0,1], is called a co-adjoint pair if the co-residual principle holds,⊖ is called the residuum of ⊕. Proposition 1 ([
8,
33])
. If ⊗ is a left-continuous t-norm then the residuum → of ⊗ is derived fromand → is called a residual implication (R-implication) induced by ⊗. Proposition 2 ([
30,
31])
. If ⊕ is a right-continuous t-conorm, then the co-residuum ⊖ of ⊕ is derived fromand ⊖ is called fuzzy difference operator induced by ⊕. Theorem 1 ([
10])
. Let → be an R-implication induced by a left-continuous t-norm ⊗ in FMP, then the solution of TIM for FMP is given by the following formula Definition 3 ([
20])
. An intuitionistic fuzzy set A is given by two functionswhich satisfy the condition and
, respectively, denote the degree of membership and the degree of non-membership of the element
u to the set
A. An intuitionistic fuzzy set
A on the nonempty universe
U can be denoted as
The set of all fuzzy subsets/intuitionistic fuzzy subsets on U is denoted as /
As a generalization of FSs, IFSs extend the range of character value from [0, 1] to the triangle domain . Let , then IFSs degenerate into FSs if and only if if and only if .
A partial order on can be defined as follows
, if and only if .
Obviously, . Denote and . and are the bottom element and the top element of , respectively. is a complete lattice.
Denote
,
.
are called the necessity operator and the possibility operator in
, respectively [
21]. These two operators convert intuitionistic fuzzy numbers into fuzzy numbers.
If we denote an intuitionistic fuzzy set for short, then . It is easy to find that the IFSs degenerate into FSs, i.e., . Obviously, .
Definition 4 ([
30])
. is called an intuitionistic t-norm induced by t-norm ⊗ if is called an intuitionistic t-conorm induced by t-norm ifwhere ⊕ is the dual t-conorm of the t-norm ⊗. Theorem 2 ([
30])
. Let be an intuitionistic t-norm induced by a left-continuous t-norm ⊗, then there exists a binary operation on satisfying the residual principle, i.e.,and is given by Definition 5 ([
30])
. is called an intuitionistic adjoint pair if satisfy (2.6) and is called an intuitionistic R-implication if is an intuitionistic t-norm induced by a left-continuous ⊗. Theorem 3 ([
30])
. Let , be an intuitionistic t-norm induced by a left-continuous t-norm ⊗, then Theorem 4 ([
30])
. Let be an intuitionistic R-implication in IFMP, then the solution of TIM for IFMP is given by the following formula Corollary 1 ([
30])
. Let be an intuitionistic R-implication in IFMP, then the triple I solution where 3. Solving Type 3 and Type 4 of GMP Based on the Principle of Major Premise Precedence
The basic character of type 3 and type 4 of GMP is that the former P and the rear Q coincide as information type in the major premise. It is a natural ideal that the selected solving model should be either FMP or IFMP according to the condition that are either FSs or IFSs—this is called the principle of major premise precedence.
3.1. Decomposition Triple I Method (DTIM) for Solving Type 3 of GMP
In this subsection, we consider inference methods of type 3 of GMP. The inference model is as follows:
where
.
, as unknown information, is either a fuzzy set or an intuitionistic fuzzy set.
Because
P and
Q are FSs, “if-then” rule can be taken as fuzzy inference. We should solve
by converting the intuitionistic fuzzy set
into fuzzy sets based on fuzzy inference model FMP. We denote
Obviously,
.
.
Therefore, firstly, we decompose the model (12) to two FMP models in which are the formers, respectively. Secondly, we obtain the solutions of FMP problems by TIM. Finally, we aggregate the two solutions to obtain .
Step1: We decompose the model (12) into two FMP models as follows:
where → is an R-implication.
Step2: We use TIM to solve the models (13) and (14), respectively. According to Theorem 1, we obtain the solutions as follows:
Since , i.e.,, , it follows from the properties of fuzzy operators that, . Now, we obtain the solutions of model (13) and model (14), respectively. How can we obtain the solutions of model (12) from ? The core of the question is which information type of it is. Obviously, it depends on what kind of information type of we want to obtain. So we have two choices, either a fuzzy set or an intuitionistic fuzzy set.
Step3: Presenting the solution of model (12).
Case1: If we suppose that , then it is reasonable that any can be the solution of model (12).
Case2: If we suppose that
, then we can aggregate
to be the following intuitionistic fuzzy set as the solution of model (12).
Example 1. Let
,
,
,
are R-implications induced by Lukasiewicz t-norm . Now we derive the solution of type 3 GMP by DTIM.
,,
Thus,
Similarly,
Therefore, if is a fuzzy set, then . That is, the membership degree of is a value in interval [0.6, 0.7], [0.7, 0.8], and [0.6, 0.8], respectively. If is an intuitionistic fuzzy set, then , i.e., 3.2. Expansion Triple I Method (ETIM) for Solving Type 4 of GMP
The solving method of type 4 GMP is similar to that of type 3. The model of type 4 is as follows:
where
. Denote
.
“If-then” rule could be taken as an intuitionistic fuzzy implication relation because are IFSs. The fuzzy set as a degenerated intuitionistic fuzzy set, can be denoted as . Based on the principle of major premise precedence, we could transform the model (15) into an IFMP model to obtain the solution by TIM of intuitionistic fuzzy reasoning.
Step1: The model (15) is transformed into the following IFMP model:
where
, and
is an intuitionistic R-implication.
Step2: Solving the model (16). Since the model (16) is an IFMP problem, we can obtain the output
by TIM. According to Corollary 1
Step3: Presenting the solution of model (15). As we explain in the previous subsection, the form of depends on the type of solution we want.
Case1: If we suppose that , then .
Case2: If we suppose that , then .
Example 2. Let
,
,
,
are R-implications induced by Lukasiewicz t-norm . Now, we derive the solution of type 4 GMP by ETIM.
It follows fromthat . Thus .
Similarly, .
Therefore, if is an intuitionistic fuzzy set, then
.
If is a fuzzy set, then . That is, the membership degree of is a value in interval [0.6, 0.8], [0.8, 0.9], and [0.6, 0.7], respectively.
4. Two Basic Methods for Solving Type 3 and Type 4 of GMP Again
It is reasonable to adopt different methods to solve the type 3 and type 4 of GMP models based on the principle of major premise precedence. In fact, the decomposition method and expansion method reflect two basic ideas of transformation to deal with mixed information models of GMP. So these two basic methods can be used to solve any model in type 3–8 of the GMP models.
4.1. ETIM for Solving Type 3 of GMP
In this subsection, we will approach the type 3 of GMP again by the expansion method. If we take this method, then we should take the fuzzy sets
P and
Q in model (12) as the degenerated intuitionistic fuzzy sets. The model (12) is transformed into the following IFMP model:
where
. Obviously,
According to Corollary 1, we obtain that
It is easy to obtain the output
of model (17). The solution
of model (12) is consequently derived from
.
If , then .
If , then .
Comparing the solution of ETIM with the solution of DTIM for the type 3 of GMP, we can find the following conclusion.
Theorem 5. ETIM is equivalent to DTIM for model (12).
4.2. DTIM for Solving Type 4 of GMP
The major premise of type 4 of GMP can be represented as an intuitionistic fuzzy proposition “
” where
. How could we transfer model (15) of type 4 into FMP problems when the minor premise is a fuzzy proposition? In fact, Formula (9) explicates the relationship between intuitionistic fuzzy implication and fuzzy operators, so the argument formula of the triple I solution for IFMP is represented by Formula (11). According to Formula (11), a decomposition method for IFMP is proposed in the paper [
34]. Naturally, Formula (11) also tells us the approach of transformation.
The model (15) is transformed into the two following FMP problems:
According to Theorem 1, we obtain
If
, then it is appropriate that
considering the condition that
and
do not constitute a partial order relation in the sense of fuzzy sets. If
, we can obtain
by aggregating
.
5. Relationship between DTIM and ETIM
For the types 3 and 4 of GMP, we show the concrete solution steps and obtain their solution by using DTIM and ETIM, respectively, in
Section 3 and
Section 4. It is similar to obtaining the solutions of type 5–8 of GMP by DTIM and ETIM. According to the results of
Section 3 and
Section 4, we could provide the following tables (
Table 2 and
Table 3) to show their solutions for types 3–4 of GMP, and do so for types 5–8 of GMP (
Table 4,
Table 5,
Table 6 and
Table 7).
Remark 1. For each type of GMP, the solutions of DTIM and the solutions of ETIM are derived from Formula (4) and Formula (11), respectively. Different types can lead to differences in formula form. In Section 3 and Section 4, we have a specific interpretation to how to obtain the form of these solutions for type 3 and type 4 of GMP. Once we have properly represented the information in the different types of model, the process of obtaining the solutions of the remaining types (types 3–8) GMP is trivial. In the calculation of some formulas, we need to use the results of preliminaries and the properties of fuzzy operators. These details are also trivial. Theorem 6. DTIM is equivalent to ETIM for the mixed types of GMP models if P is a fuzzy set.
Proof. In fact, the mixed types of GMP are type 3–8 of GMP. If
P is a fuzzy set, they are type 3, 5, and 7 of GMP. It is valid for type 3 of GMP from Theorem 5 and types 5 and 7 of GMP from
Table 4 and
Table 5. □
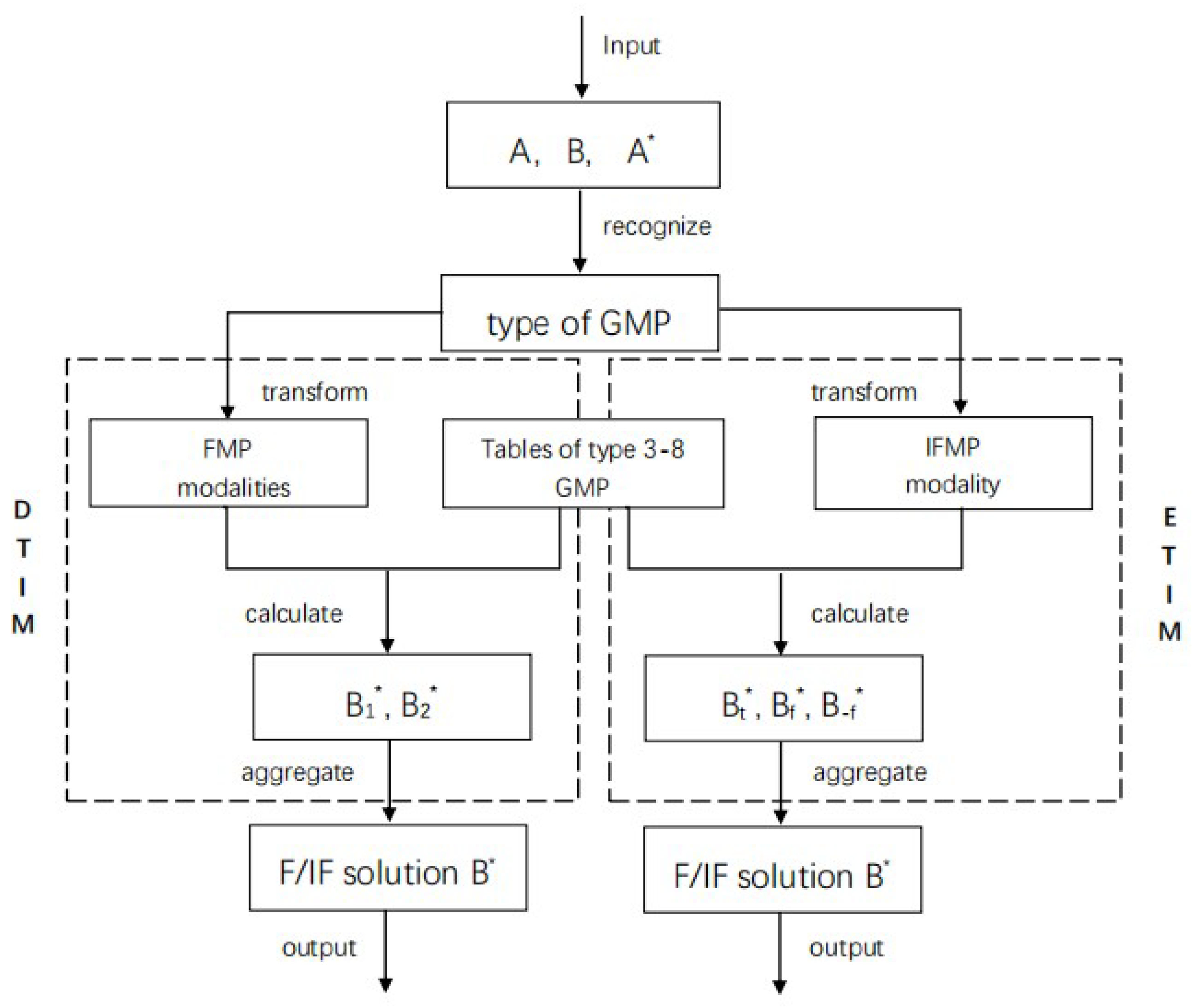
Remark 2. Obviously, DTIM is not equivalent to ETIM when , but the intuitionistic fuzzy solution of DTIM is equivalent to that of ETIM for types 4 and 8 of GMP. From Table 2, Table 3, Table 4, Table 5, Table 6 and Table 7, we can find that the second argument of intuitionistic fuzzy solution by DTIM is equal to that by ETIM for all types of GMP. That is, the second argument of intuitionistic fuzzy solution has invariance property by the two basic methods for all types of GMP. Figure 1 shows the core process of solving the mixture type of GMP problem by DTIM and ETIM.
6. Reversibility of DTIM and ETIM
As we all know, the reversibility of inference methods is an important issue in fuzzy reasoning. The TIM of FMP and IFMP is reversible. It is interesting to explore whether DTIM and ETIM satisfy the reversibility, i.e., implies .
Definition 6. In FMP/IFMP, a method is called C-reversible if implies whenever condition (C) is satisfied.
In particular, if the condition (C) is: P is normal, i.e., such that then the prefix C- can be omitted. TIM possesses virtue of reversibility compared with CRI.
Theorem 7 ([
8,
30])
. TIM of FMP/IFMP is reversible, i.e., whenever is normal. Corollary 2. If there exists such that , then In any mixed type of GMP, we provide the two alternatives for , a fuzzy set or an intuitionistic fuzzy set. When we mention the reversibility of a method to solve a mixed type of GMP, it means that an alternative satisfies if . Of course, we realize that the assumption is not always satisfied. When , the assumption can be satisfied, but in the reverse, when , the assumption can not be guaranteed. Types 3–8 of GMP are concerned except type 4 and type 8.
Theorem 8. For types 3, 5, and 7 of GMP, DTIM and ETIM are reversible, i.e., whenever is normal.
Proof. In types 3, 5, and 7 of GMP,
P is a fuzzy set. According to Theorem 6, DTIM is equivalent to ETIM for these types of GMP. So we only need prove that DTIM is reversible. By DTIM, type 3 of GMP is transformed into two FMP problems and the two solutions of FMP problems are given, respectively, as follows,
If
, i.e.,
, then
.
P is normal, i.e.,
such that
, so
Therefore, if
is a fuzzy set, then
. Meanwhile, if
is an intuitionistic fuzzy set, then
. The proof for type 3 of GMP is completed. It is similar for types 5 and 7 of GMP. □
Theorem 9. For type 6 of GMP, DTIM and ETIM are reversible, i.e., whenever is normal.
Proof. In type 6 of GMP,
P and
are intuitionistic fuzzy sets and
Q is a fuzzy set. Put
. By DTIM, we obtain
Since
is normal, we obtain
Therefore, if
is a fuzzy set, then
. Thus, DTIM is reversible.
By ETIM,
Obviously, when
, i.e.,
and
P is normal,
P is normal. It is said that there exists
such that
, i.e.,
. It follows from
that
So
. Therefore, if
is a fuzzy set, then
. Thus, ETIM is also reversible. □
7. Conclusions
FMP and IFMP are the two representations of GMP in the fuzzy environment and intuitionistic fuzzy environment, respectively. They are basic and important problems in fuzzy reasoning. For a mix of fuzzy/intuitionistic fuzzy information, we discussed six mixed types of GMP in this paper. Based on TIM, we took two basic transformation patterns—decomposition and expansion—to solve each mixed type of GMP problem. By DTIM and ETIM, we transformed a mixed type of GMP problem into FMP problems and IFMP problems, respectively, gave the corresponding triple I solutions of FMP problems and IFMP problems, and composited these solutions to obtain the solution of the GMP problem. We obtained the solutions of DTIM and ETIM for six mixed types of GMP and presented the equivalence between DTIM and ETIM. Moreover, we investigated the reversibility of DTIM and ETIM and found that DTIM and ETIM were reversible except for types 4 and 8 of GMP. Our research proposes methods for fuzzy reasoning with specific types of mixed information. We are looking forward to this work supporting and aiding the wider application of fuzzy reasoning.
In the future, we will focus on the following issues: (1) It is interesting and valuable to generalize our methods or explore a novel method for the mixture of more general and complex fuzzy information. (2) The triple I method based on the flexible ordering property was proposed in [
18]. The performance of DTIM and ETIM with the flexible ordering property deserves further study.




{kind=link}