1. Introduction
Adinkras are diagrams that encode supersymmetric (SUSY) transformation laws with complete fidelity in one spacetime dimension and in two spacetime dimensions [
1]. Different colored lines in adinkra diagrams encode the action of distinct one-dimensional supercharges on the field variables of a supermultiplet. The lines connect nodes that encode fields related by the supersymmetry transformation. Adinkras are useful theoretical tools for many reasons. First, adinkras are elegant and concise classification tools that encode a plethora of mathematics similar to Dynkin diagrams and Feynman diagrams. Second, adinkras have proven useful in discovering previously-unknown supersymmetric multiplets [
2]. We seek to further develop adinkras as a search tool to uncover finite realizations of off-shell supersymmetric representations: most notably 4D,
super Yang–Mills theory and 10D and 11D supergravity. Such representations lie outside the no-go theorem of [
3]. A finite representation of the off-shell superconformal hypermultiplet has recently been uncovered [
4]. This is promising evidence pointing toward the possibility of a finite realization of 4D,
super Yang–Mills theory. The utility of adinkras in analyzing extended supersymmetric systems was demonstrated in [
5] where the adinkra parameter
was used to classify which 4D,
off-shell supersymmetric systems can be represented with finite numbers of auxiliary field and which cannot. Third, adinkras relate supersymmetric systems that exist in different dimensions, possibly providing a holographic path to uncover unknown representations. Adinkras can be “shadows” of higher dimensional supersymmetry where an adinkra can be drawn that encodes the entire transformation laws when the system is considered to depend only on one or two of the spacetime dimensions.
Classifying supersymmetric systems in terms of which adinkras they reduce to is known as supersymmetric genomics [
6,
7,
8], whereas building higher dimensional supersymmetry from lower dimensional supersymmetry (dimensional enhancement) is known as supersymmetric holography [
9,
10,
11,
12,
13,
14,
15,
16,
17]. As there are generally more low-dimensional than high-dimensional supersymmetric systems, a classification scheme is necessary to sort out which lower dimensional systems are related to which higher dimensional systems. Defining equivalence classes is essential to the adinkra sorting process.
In this paper, we report the discovery of 96 equivalence classes of four-color, four-boson, and four-fermion adinkras. These equivalence classes can be thought of as classes of inner products within an orthogonal basis for adinkras: two adinkras can be thought of as equivalent if they decompose the same way in this basis, thus having a normalized inner product of one. As shown in [
12,
16], a set of holoraumy (the word “holoraumy” was defined in [
15] as a combination of the Greek word
holos (complete) and the German word
raum (space)) matrices
can be constructed from the transformation laws encoded by the adinkra. These holoraumy matrices exist in a space spanned by six basis elements
and
. The basis elements
and
form mutually-commuting su(2) algebras. An inner product was first defined for this basis in [
12]. This inner product has been called the
gadget in many subsequent works such as [
16,
18,
19]. The gadget between two adinkra representations equals one if the adinkras have identical
’s. Following [
19], we define holoraumy-equivalence classes of adinkras whose inner products equal one. We organize our results in terms of
and
: the signed permutation groups of three and four elements, respectively. The relationships between the different holoraumy-equivalence classes are presented in terms of
color transformations that map one equivalence class to another. The main results of this paper are
the discovery of the mappings to all -equivalence classes,
the generation of all 36,864 four-color, four-boson, and four-fermion adinkras in terms of boson × color transformations of two -inequivalent adinkras, dubbed the quaternion adinkras,
the presentation of a formula that encodes all 36,864 four-color, four-boson, and four-fermion adinkras in terms of their -equivalence classes,
the explanation of the count of all possible gadget values in terms of equivalence classes, and
the connections between the gadget, holoraumy, and dynamics through Kähler-like potentials.
The second and third results will elucidate
why there are 36,864 four-color, four-boson, and four-fermion adinkras, as well as encode all such adinkras in two succinct equations. The matrix representations of the quaternion adinkras we define satisfy the quaternion algebra. Though lesser discussed at present, describing supersymmetry in the language of quaternions has been investigated before [
20].
The fifth result is the major achievement of this work. For the first time, a universal non-linear σ-model is defined over the entirety of the 36,864 adinkras that provide the basis for all linear representations of 1D, N = 4 supersymmetry.
The vast majority of our previous efforts in the study of adinkras has concentrated on the issue of building a rigorous representation theory. However, there have been two exceptions. In the work of [
21], it was shown how to couple one-dimensional SUSY models with arbitrary extensions of the numbers of worldline supersymmetries to external magnetic fields. The existence of a “super Zeeman effect” was noted. The other exception [
22] explored the question of the compatibility of the traditional superfield approach of one-dimensional supersymmetrical theories with the approach of using adinkras in these same theories. Compatibility was shown, and this opens the path for explaining how the adinkra approach leads to a uniform and universal formalism for describing the “model space” of 1D,
N = 4 supersymmetric
-models.
The topic of one-dimensional
N = 4
-models, which began in 1991 [
23,
24,
25], developed into a substantial literature [
26,
27,
28,
29,
30,
31,
32,
33,
34,
35,
36,
37,
38,
39,
40,
41,
42,
43,
44,
45,
46,
47,
48,
49,
50,
51], some even prior to the work in [
22]. Parts of this work have been empowered by some of the insights (e.g., “root superfields” provide one example) gained from adinkras. The efficacy of these models can be seen by the range of concepts to which they connect such as:
- (a)
Hopf maps,
- (b)
superconformal mechanics,
- (c)
supersymmetric Calogero models,
- (d)
supersymmetric CP(n) mechanics,
- (e)
superconformal mechanics and black holes,
- (f)
supersymmetric WDVVequations and roots, and
- (g)
Hyper-Kähler and Clifford–Kähler geometries with torsion.
The reader should keep in mind that the recitation and citations of this paragraph constitute only a very small slice of the literature. If one looks at the cited work of this paragraph, it can be noted there was an effort to establish a universal formalism, via the use of harmonic superspace techniques [
36,
37,
38], to describe all such models. Such a universal formalism is what we mean by the use of the term “model space.” We next review the issue of the control of the model space in the more familiar context of 4D,
= 1, 2D,
= 2, and 2D,
= (2, 0)
-models. These are domains in which these issues are well understood and settled. We use this discussion as the basis for the construction of a universal formalism for describing the universal
Coxeter group non-linear
-model.
This paper is organized as follows. In
Section 2, we briefly review adinkras and how they can describe higher dimensional systems, as well as show how
-equivalence classes have already been used to distinguish some of these systems. We illustrate the process of SUSY holography, demonstrating the missing steps and commenting on possible solutions. In
Section 3, we introduce the quaternion adinkras, and in
Section 4, we report the 96
-equivalence classes that are generated from the quaternion adinkras and span all 36,864 four-color, four-boson, and four-fermion adinkras. We use these equivalence classes to explain the counts of the four different gadget values calculated in [
19] and present the formula that encodes all 36,864 four-color, four-boson, and four-fermion adinkras. In
Section 5 and
Section 6, we demonstrate connections between holoraumy and dynamics. Specifically, in
Section 5, we demonstrate how the holoraumy for each of four different 2D SUSY sigma models is different from the others, thus having gadgets differ from unity. In
Section 6, we demonstrate how the holoraumy matrices appear in a set of 1D SUSY actions generated by a Kähler-like potential and demonstrate how a particular choice of Kähler-like potential yields the common action for all 36,864 1D SUSY models investigated throughout the rest of the paper. The connections shown in
Section 5 and
Section 6 will be particularly important as we continue our quest to develop SUSY holography.
3. Quaternion Adinkras
We denote the group of signed permutations of three elements as
. Any element of
can be expressed as a sign flip element
times a permutation element
. The indices take the values
and
.
A line over a number indicates a sign flip for that element. The explicit matrix forms for these elements are given in
Appendix B. Hitherto, we shall refer to permutation elements as flops and sign flips as simply flips.
A general element of
is given by:
The Vierergruppe
, also known as the Klein four-group, is a subgroup of the permutation group of four elements
:
where
. A general element of
, the group of signed permutations of four elements, can be expressed as plus or minus one times an
element times an element of the Vierergruppe.
Left cosets of the Vierergruppe via
generate all elements of
as follows [
13,
52]:
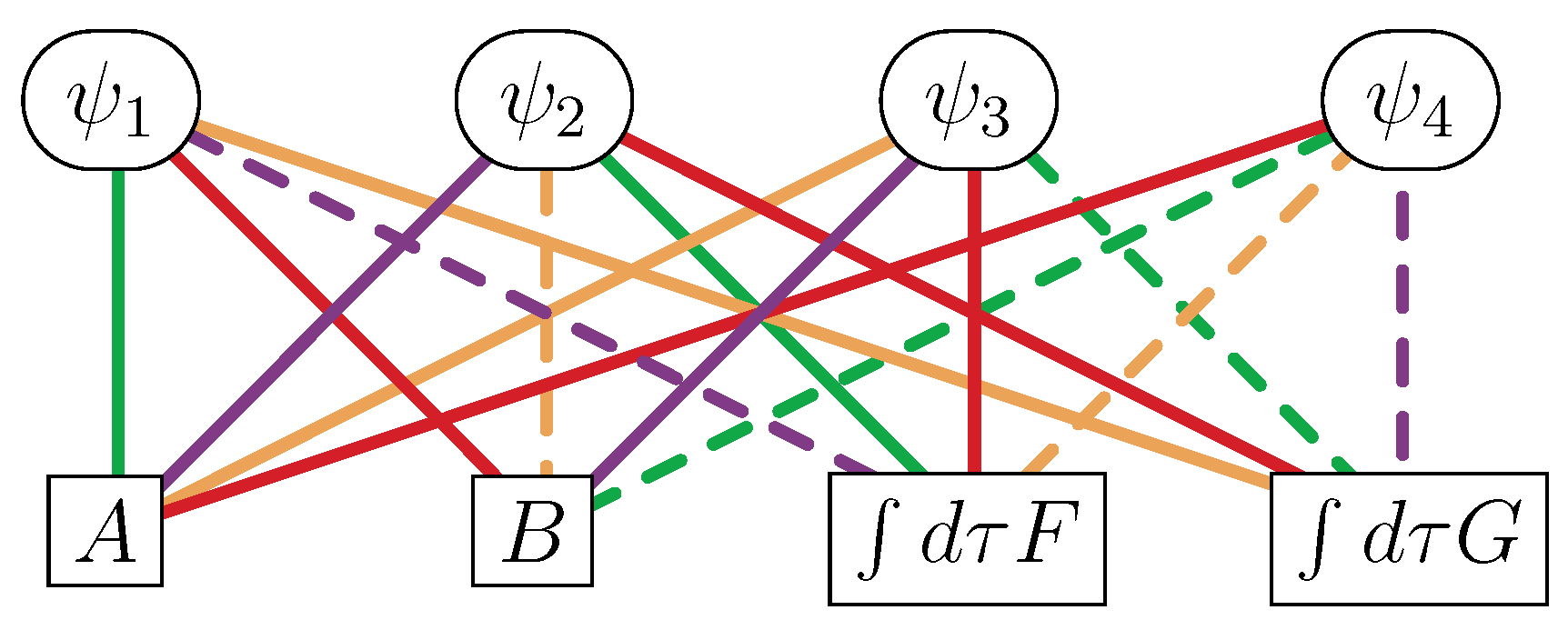
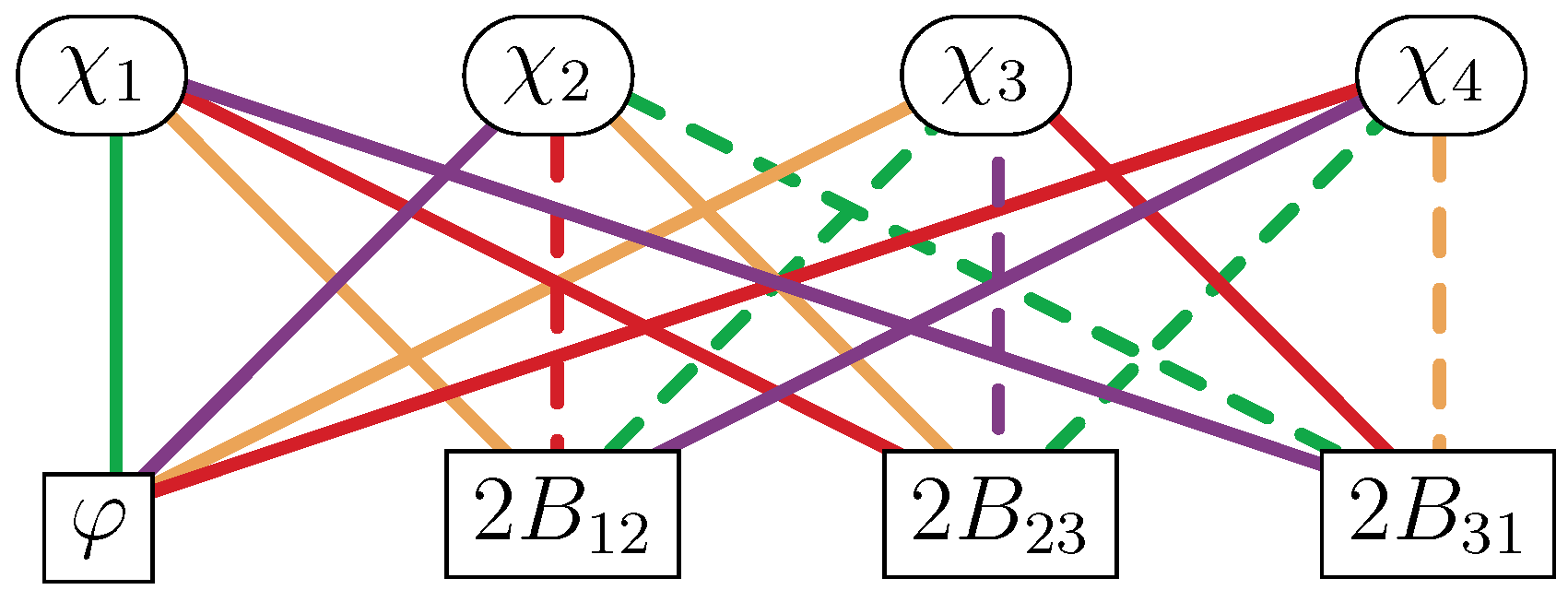
Consider the adinkras in
Figure 5, dubbed the quaternion adinkras
Q and
:
These have the matrix representations:
Notice that
is the same as the
trans adinkra in
Figure 1.
We can express any adinkra matrices as elements of
. For the quaternion adinkras, we have:
with
. The matrices
and
are given in
Appendix A, and
is the
identity matrix. Forgetting the bosonic and fermionic nature of the rows and columns of
and
, they satisfy the quaternion multiplication rules (Technically, two
-matrices can not be multiplied together. Here, it is meant that
; no
sum and for
.):
They are also mutually commuting:
The quaternion adinkras
Q and
belong to separate
ℓ and
-equivalence classes:
These values of
ℓ and
can be succinctly written as
matrices:
The gadget between the quaternion adinkras is therefore zero: . Both quaternion adinkras belong to the -equivalence class .
5. Moving Toward 1D, = 4 Minimal Valises AND
Sigma-Models
The previous sections have been devoted to constructing a streamlined mathematical approach to sorting among the 36,864 adinkras that possess four colors, four closed nodes, and four open nodes. This is a problem in representation theory. At this point of our discussion, we will build on the previous sections’ foundation to engage the application of this foundation to the construction of 1D, N = 4 non-linear sigma-models over the Coxeter group.
5.1. Review of the Discovery of Twisted Reps in Sigma-Models
For 4D,
= 1
-models [
53], there are two ingredients, chiral superfields
and a Kähler potential
, which come together to define a dynamical system via the supersymmetrical action formula:
This defines the most general possible 4D,
= 1
-model. For each choice of
and choice of the range of the superscript
I on
, there is a model that is well defined. It is also the case that no other 4D,
= 1
-models exist. Therefore, there is a type of completeness description implicit in the fact that there is only one 4D,
N = 1 minimal superfield representation, which implies that a specification of
K completely describes the space of 4D,
N = 1
-models. This situation is what we refer to as “control of the model space.”
It is simple to reduce the action above to one where only two of the four spacetime manifold coordinates are retained. One is led to write:
but control of the model space is lost. There is nothing wrong with the action above. However, what changes is there exists another scalar supermultiplet in 2D,
= 2 superspace that does not exist in 4D,
= 1 superspace.
As was first shown in the works of [
54,
55], a distinct 2D,
= 2 supersymmetric scalar multiplet, the so-called “twisted chiral supermultiplet” (denoted by
and where the range of the index
I may be different from that of the
index) exists in the lower dimension. Thus, modifying the action to the form:
with the inclusion of the twisted chiral supermultiplet restores control of the model space for minimal off-shell representations. It can be seen that a Kähler-like potential
K still controls the geometry. In the case of the four-dimensional
= 1
-model, this geometry describes a Riemannian Kähler manifold. In the case of the complete two-dimensional
= 2
-model, this geometry is a non-Riemannian bi-Hermitian manifold with torsion.
The distinction between two-dimensional
= 2
-models constructed solely from chiral supermultiplets or solely from twisted chiral supermultiplets in comparison to two-dimensional
= 2
-models constructed from both chiral supermultiplets and twisted chiral supermultiplets arise from the representation theory fact that the two types of supermultiplets are “usefully inequivalent” [
56].
When two-dimensional
= 2 supermultiplets are reduced to one-dimensional
supermultiplets, the distinction between the chiral supermultiplet (
) and twisted chiral supermultiplet (
) can be seen in their gadget values [
19]:
As first discovered in [
54,
55] and later related to adinkras in [
15,
16,
19], the 2D
twisted chiral multiplet is the dimensionally-reduced 4D,
vector multiplet. We see in comparing Equation (
83) to Equation (
39) that the gadget keeps track of this relationship between the twisted chiral and vector supermultiplets.
The two-dimensional
-model actions can also be reduced to one-dimensional
-model actions,
and the works of [
36,
37,
38] in principle capture all of these (as we only consider valise supermultiplets, the chiral and twisted chiral superfields in (
84) correspond to starting with their 4D progenitors where both auxiliary fields have been replaced by three-forms). However, here, it is useful to recall the experience of the reduction from 4D,
= 1
-models to 2D,
= 2
-models. The loss of control of the model space came about because the actions and supermultiplets that appear in them are “blind” to the appearance of ‘new’ supermultiplets that can result from the reduction process.
In order to demonstrate the loss once more, it is useful to show the reduction from 2D, = 2 supersymmetry to first consider the intermediate step where we consider 2D, = (4,0) supersymmetry. This will allow the explicit demonstration of the emergence of new supermultiplets in the intermediate step. Thus, any further reduction to 1D, = (4,0) supersymmetry must inherit these supermultiplets from 2D, = (4,0) supersymmetry.
5.2. 2D, = (4,0) Supersymmetry Considerations
We introduce the bosonic coordinates for the worldsheet
and
assembled into light cone coordinates
and
such that:
For (4,0) superspace, four Grassmann coordinates correspond to the + component of spinor helicity with regard to the worldsheet Lorentz group. Therefore, we have:
As the Grassmann coordinates are complex, the “isospin” indices, denoted by
i,
j, … etc.) may be regarded as describing an internal su(2) symmetry.
Finally, we introduce the superspace “covariant derivatives”:
together with the light cone derivatives
and
to describe the tangent space to the supermanifold. These definitions ensure the equations:
5.3. Reviewing the Known 2D, = (4, 0) Minimal Scalar Valise Supermultiplets
Many years ago [
57,
58], it was demonstrated that there is a minimum of four distinct (4, 0) valise supermultiplets each containing four bosons and four fermions. Thus, one can introduce a “representation label”
, which takes on four values denoted by SM-I, SM-II, SM-III, and SM-IV. The field content of each is shown in
Table 6. All fields with two such indices are traceless. The bosons are
, and
, and of these, only
and
are real (or Hermitian).
Regarding the su(2) symmetry, the supercovariant derivatives, the bosonic fields, and the fermionic fields are distributed among different irreducible representations, as shown in
Table 7.
It is noteworthy that the first two of these supermultiplets (i.e., SM-I and SM-II) can be interpreted as arising from a dimensional reduction process applied to the well-known 4D, = 1 “chiral supermultiplet” and “vector supermultiplet”, respectively. With respect to the other two supermultiplets, there are no discussions known to us that indicate they can arise solely as the results of such dimensional reductions. The SM-III and SM-IV supermultiplets, however, are related respectively to the SM-I and SM-II supermultiplets by a Klein transformation, where bosonic fields and fermionic fields are exchanged one for the other.
These fields may be interpreted in two ways. In the first interpretation, all these are component fields that are functions solely of light cone coordinates and . In the second interpretation, these are each regarded as the lowest component of a corresponding superfield in the expansion over the basis of the superspace Grassmann coordinates.
The “D-algebra” or “SUSY transformation law” for each supermultiplet is given in Equations (89)–(92), which follow.
The fermionic holoraumy for each of these multiplets is given in
Appendix C.
5.4. Uniformization via Real Formulations
In order to calculate the values of the first gadget, in the context of these
supermultiplets described previously, it is necessary to convert all their descriptions into a real basis where the comparison process can be made in the simplest possible manner. In particular, the first step is to obtain the “L-matrices” and “R-matrices” associated with each of the four representations: SM-I, SM-II, SM-III, and SM-IV. As was emphasized in the Appendix of the work in [
59], “L-matrices” and “R-matrices” can be identified in dimensions greater than one. In this particular example, the “L-matrices” and “R-matrices” were shown for superspaces with three bosonic coordinates.
To begin, we note that for the operator
, we can write:
where the four “supercovariant derivatives” are defined with respect to the four real (Majorana) spinor coordinates for the
superspace
,
,
, and
. It is important to note that the labels
,
,
, and
are fixed values, not indices that take on different values.
Taking the complex conjugate of the results in (
93), we find:
which imply also the validity of the complex conjugate version of (
88). Together, (
93) and (
94) imply:
which in turn allows the definition of a real (4, 0) superspace covariant derivative through the equation:
where subscript index I takes on the four fixed values
, …
. This definition implies that the equation:
is satisfied.
Let us also highlight that in (96), there is a notational device introduced. The quartet Majorana supercovariant derivative operator is denoted by , whereas the complex SU(2)-doublet supercovariant derivative operator is denoted by the pair , . Thus, Equation (96) solidifies the definition of the Majorana supercovariant derivative operator. The next step is also do this for all fields.
For the bosonic and fermionic fields in each supermultiplet, we define:
Therefore, when all of the bosons and fermions in Equations (89)–(92) are expressed in terms of real quartets of functions as in (98)–(101) and the Majorana supercovariant derivative in (96) is used, they universally possess SUSY transformation laws in the form:
In the expression (102),
denotes the i
th boson associated with the
-th (4, 0) supermultiplet and
denotes the
-th fermion associated with the
-th supermultiplet, and the explicit forms of the matrices
and
depend on the value of
. For all representations, they satisfy:
Thus, by choosing to work in a real basis, the disparate forms of the field content and transformation laws seen in (89)–(92) have been subjected to a “uniformization.”
5.5. 2D, = (4, 0) Adinkra-Related Matrices and Gadget Values
With the results of the last subsection in hand, we can build on these and are in a position to calculate the fermionic holoraumy matrices defined by:
where:
associated with each supermultiplet SM-I, SM-II, SM-III, and SM-IV. It can be seen that if one deletes the helicity label (i.e., the + signs) from these and makes the replacement
→
, then (
97)–(111) take the exact form as the equations given for adinkras and 1D,
N = 4 supersymmetry [
15,
16]. We can decompose the
in terms of
and
as in Equation (
35). In doing so, we find:
The matrix quantity
defines the fermionic holoraumy tensor for each supermultiplet, and once the matrices
and
are used to calculate it, we have a universal form of the holoraumy tensor for each supermultiplet. Denoting two of the
supermultiplets by
and
, along their holoraumy matrices
and
, the “gadget value” between the two representations is defined by the equation:
It is perhaps of note to observe that the discussion here is the first time that we have extended the concept of holoraumy into the realm of heterotic supersymmetry. The gadget values between the four supermultiplets can be represented by a 4 × 4 matrix, and listing the order of the representation labels as (SM-I), (SM-II), (SM-III), and (SM-IV) for both rows and columns, we find:
The gadget values shown in the equation above explicitly show an important lesson about the reduction process. It can be seen that the value of + 1/3 appears. Recall that for the 2D, = 2 supermultiplets, this value never occurs. However, in the case of 2D, = (4, 0) supermultiplets, this gadget value readily appears.
As both the 2D, = 2 supermultiplets and the 2D, = (4, 0) supermultiplets can be reduced to 1D, N = 4 supermultiplets, this is an explicit demonstration that the model space of any and all possible 1D, N = 4 non-linear -models must be larger than that found by dimensional reduction!
5.6. Reducing to 1D, N = 4 Superspace
The process of going from 2D,
= (4, 0) superspace to 1D,
N = 4 superspace simply amounts to demanding that all fields depend solely on the temporal dimension of the higher dimension. Additionally, all the helicity indices are simply dropped from spinors, partial derivatives, etc., as there is no helicity in 1D. However, in 1D, we are still able to maintain the distinction between bosons and fermions since the equations:
must be valid in order to have well-defined component actions.
The main goal of this section was to provide a convincing argument that knowing the standard supermultiplets associated with the reduction to two-dimensions of the chiral and vector supermultiplet totally misses the appearance of two new supermultiplets that can be constructed on the basis of the use of the Klein transformation. All of these supermultiplets are compactly described by quartets of bosons and fermions that are expressed uniformly in the equation of (102).
However, from our study of adinkras with four colors, we know that these four supermultiplets are only four among a total of 36,864 such supermultiplets. This raises questions.
How does one distinguish among the 36,864 such supermultiplets?
How does one describe a sigma-model built, not only on the basis of the four supermultiplets (SM-I), (SM-II), (SM-III), and (SM-IV), but one constructed from any or all of these supermultiplets found by the study of adinkras?
The first of the questions is the one of classification, and the previous sections deal with this issue and provide methods for classifying these 1D, N = 4 valise supermultiplets. This was a primary motivation for the arguments developed.
The second question is equivalent to the question of providing a universal formulation of all possible such sigma-models. A solution to this will be presented in a subsequent section. This is very much a question of physics as descriptions of dynamical systems follow from such actions.
6. The Universal 1D, N = 4 Minimal Valise Sigma-Model
The enumeration of the 36,864 adinkras implies that this constitutes a starting point where every possible linear minimal valise representation of 1D, N = 4 supersymmetry has been made explicitly “visible.” Thus, if there is a way to concatenate the standard 1D, N = 4 superspace formalism together with the -enumerated adinkra-based formalism, we are guaranteed to have complete control of the model space 1D, supersymmetric -models.
The work in [
22] ensures the concatenation is possible. The key observations are:
- (a)
The links in the adinkra use the symbol as their representation, and in a traditional superfield, these can be interpreted at the superspace super- covariant derivative.
- (b)
Every bosonic and fermionic node of an adinkra may be regarded as the lowest component of a corresponding superfield.
These observations imply that one need only re-interpret the symbols used for adinkra-based supermultiplets to obtain traditional superfield equations.
In particular, this implies that a
-model action formula involving superfields obtained from
adinkras via the prescription above must take the form:
where
is a choice of the scalar superfields associated with any representation
among the 36,864
-based valise adinkras, and the notation | as usual means first perform all the indicated differentiations followed by taking the limit as all superspace Grassmann coordinates are set to zero. Now, on these superfields, we have the following equations.
and after performing all the differentiations shown in the action formula, this yields the form of the final action. This can be simplified if we express it in terms of four coefficients denoted by:
- (a)
, a metric for the bosonic kinetic energy terms,
- (b)
, a metric for the fermionic kinetic energy terms,
- (c)
, a coupling of bosons and quadratic in fermions, and
- (d)
, a coupling of bosons and quartic in fermions.
These allow the action to be expressed as:
The definitions of these coefficients follow from comparing Equation (
121) to Equation (
122).
All repeated indices in these equations (including the representation indices) are to be summed over all possible values that occur in Kähler-like potential. In these expression, we have used the notations
to denote the derivatives of the Kähler-like potential.
To show this yields the usual component level free action for the 36,864 valise adinkras described in the previous sections, Equation (
1), one should take any superfields and choose
K to be the quadratic function:
(where
can be any of the shown adinkras) of the bosonic nodal fields for each of the adinkras. For this choice of the Kähler-like potential, the geometry of the
-model is flat. If additional terms higher order in the fields, including even powers of fermion superfields, are included, then the geometry associated with the Kähler-like potential becomes non-trivial.
The coefficient functions denoted as and define the metrics respectively on the spaces of component bosons and fermions of the supermultiplets. In a similar manner comparing to familiar such terms of supersymmetric -models, the obvious interpretation of this term is that it defines an affine connection on the space of fermions. Finally, making a similar comparison leads to the conclusion that should describe the curvature tensor of the -models. For the choice where is restricted to solely quadratic terms, and vanish.
The most important points to take away from this discussion is the forms of the action and the related equations of motion depend on two distinct types of data. One of these is the form of the Kähler-like potential K. The other is the representation of the valises that are chosen to appear in the -model. In the action formula, these representation data are contained in the V-matrices and L-matrices.
7. Conclusions
Adinkras are useful and interesting tools with which to study supersymmetry. Perhaps the most useful aspect is the ability to encode information about higher dimensional supersymmetry. To refine holographic procedures, a clear description of equivalent adinkras is necessary. This paper used the gadget to provide a descriptions of 96 such equivalence classes: the -equivalence classes of four-color, four-boson, and four-fermion adinkras. These are equivalence classes of 48 color transformations (signed three-permutations) of two -inequivalent quaternion adinkras. Each equivalence class was shown to contain 384 adinkras; hence, the 96 equivalence classes contain all 36,864 four-color, four-boson, and four-node adinkras.
These equivalence classes serve to elucidate some of the mysteries of the gadget seen in [
19]. For instance, we showed that the plus one-third gadget only arises between equivalence classes of different color-parity. We also found correlations between the frequencies of the gadget values and the color-parities of the equivalence classes. The gadget value of zero occurs most frequently because it is the only gadget value that occurs between adinkras of different isomer- and isomer-tilde-equivalence classes. Within each isomer- and isomer-tilde-equivalence class, color-parity seems to control why the minus-one third gadget appears more frequently than the plus one-third gadget: both appear equally between adinkras of different color-parity, but only the minus one-third gadget appears between adinkras of the same color-parity. The gadget value of one is the least frequent, as it can only occur between adinkras of the same
-equivalence class.
Another important result of this paper is Equation (
75), which compactly encodes
all 36,864 four-color, four-boson, and four-fermion valise adinkras. Furthermore, the utility of the gadget in distinguishing multiplets related by dimensional reduction was demonstrated. Specifically, the twisted chiral multiplet and the vector multiplet were used as an example. Dimensional reductions of actions were discussed in terms of Kähler-like potentials; technology we plan to use to advance SUSY holography. Future work will focus on utilizing equivalence classes to develop holographic techniques that we plan to extend to adinkras with more supercharges such as 4D,
super Yang–Mills theory and 10D and 11D supergravity.
The discussion under (
117) is a demonstration of the presence of SUSY holography once more. This provides a beautiful physics reason for why the gadget value of +1/3 is so distinctive from the other gadget values of −1/3, 0, 1. The latter occur in the one-dimensional shadows of supermultiplets all the way up to 4D,
= 1 theories, but the former only occurs in the one-dimensional shadows of supermultiplets up to 2D,
= (2, 0). The ability of adinkras and their holoraumy to keep track of this level of subtlety should be convincing to any skeptic who doubts the efficacy of this approach to the study of supersymmetric representation theory.
“Equality is not in regarding different things similarly, equality is in regarding different things differently.”
—Tom Robbins









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}