1. Introduction
Remote sensing technology is one of the essential means to obtain surface information in Earth observation (EO) missions [
1,
2]. With the development of satellite imaging technology, there are constantly more remote sensing data with diverse and complementary information, and the requirement for data fusion technology is increasing. Advanced multimodal remote sensing data (e.g., hyperspectral, synthetic aperture radar, and LiDAR data) and data fusion technologies are used for complex land use/land cover (LULC) classification, to rapidly and accurately grasp surface natural resources information, which is critical for sustainable development [
3,
4].
Hyperspectral data have approximately continuous spectral information. When combined with geometric characteristics of spectral curves, specific vegetation types and soil substrate components can be identified. However, it is easily affected by cloud cover, so there are often two interference factors, thick clouds and shadows. The commonly used hyperspectral data include PRISMA data, Zhuhai-1 data [
5], GF-5 data [
6], and ZY1-02D data [
7,
8,
9]. According to the scattering mechanism of ground objects, dual-polarization SAR data can provide shape, texture, vegetation density, and soil moisture conditions to distinguish different ground objects without being affected by clouds [
10]. However, the presence of speckle noise in synthetic aperture radar (SAR) data makes the classification accuracy of ground objects lower than in optical data. The commonly used SAR data include Radarsat-2 data from the C-band [
11], Sentinel-1 data from the C-band [
12], ALOS data from the L-band [
13], and GF-3 data from the C-band [
5,
14].
Nowadays, supervised classification using spectral information [
9], spatial information, or backscattering information [
15] from a single dataset is the main research method for LULC classification. However, the information contained in a single dataset is limited, and the capacity to identify complex ground objects is insufficient. For example, SAR data cannot distinguish vegetation with a similar scattering mechanism. Therefore, the combination of spectral information, spatial information, and backscattering information from hyperspectral and SAR data is an effective way to improve classification accuracy. There are still two unsolved problems in the fusing process.
The first issue centers on the insufficient fusion capacity of hyperspectral and SAR data in feature fusion. Research methods for feature fusion and classification of multimodal remote sensing data can be divided into “feature engineering + classifier” and end-to-end neural networks with two branches [
16]. On the one hand, texture features, spectral features, polarization decomposition features, and elevation features are extracted from multimodal remote sensing data. They are directly stacked or selected and optimized by using trivariate mutual information (TMI), correlation analysis, and other methods [
17,
18], and then sent to KNN, RF, SVM, and other classifiers for classification [
14,
18,
19]. On the other hand, feature representation is directly extracted from the original data based on end-to-end neural networks combined with training samples, while feature fusion and classification are adaptive [
15,
20]. Overall, simple feature stack, feature selection, or fusion with equal weight do not achieve effective integration of multimodal features.
The second issue relates to the suitability between multimodal feature fusion methods and specific data sources. Multimodal feature fusion methods can be divided into shallow feature fusion and deep feature fusion, according to the types of hyperspectral feature extraction methods [
21]. Shallow feature fusion includes multiple kernel learning [
22], manifold alignment [
23,
24], and subspace fusion [
25]. The classification accuracy of the subspace fusion method in the Houston dataset is 85.32%. Deep feature fusion represents the multimodal deep learning (MDL) method, which includes early fusion, middle fusion, late fusion, encoder–decoder fusion, and cross fusion [
26]. The classification accuracy was compared in the Houston dataset, which from early fusion to cross fusion was 84.88%, 86.02%, 87.60%, 88.52%, and 89.60%, respectively. Deep feature fusion is superior to shallow feature fusion, and with the improvement of fusion capacity, higher classification accuracy is obtained. For example, the classification accuracy of CCRNet achieved 88.15% through cross-channel fusion [
27]. FusAtNet added spatial-spectral self-attention and cross-attention modules, and the overall accuracy was 89.98% [
28]. S²ENet is added to the spectral information enhancement network (SEEM) and spatial information enhancement network (SAEM) for cross fusion, with an overall accuracy of 94.19% [
29]. Although the above methods have been proven to be effective in multimodal data fusion, these methods only focus on hyperspectral and LiDAR data due to the limitations of public datasets. Both hyperspectral and SAR data have advantages in ground object information detection, which highlights the necessity to design a deep feature fusion method. This method takes the characteristics of hyperspectral and SAR data sources into account, to be suitable for LULC classification or other related fields.
To solve the problems in the above research methods, the encoder–decoder framework [
30] is selected from the perspective of adapting to data sources. The fully connected neural network is more suitable for feature extraction or feature fusion of hyperspectral data due to its transformation in channel dimension, and more channel information can be retained [
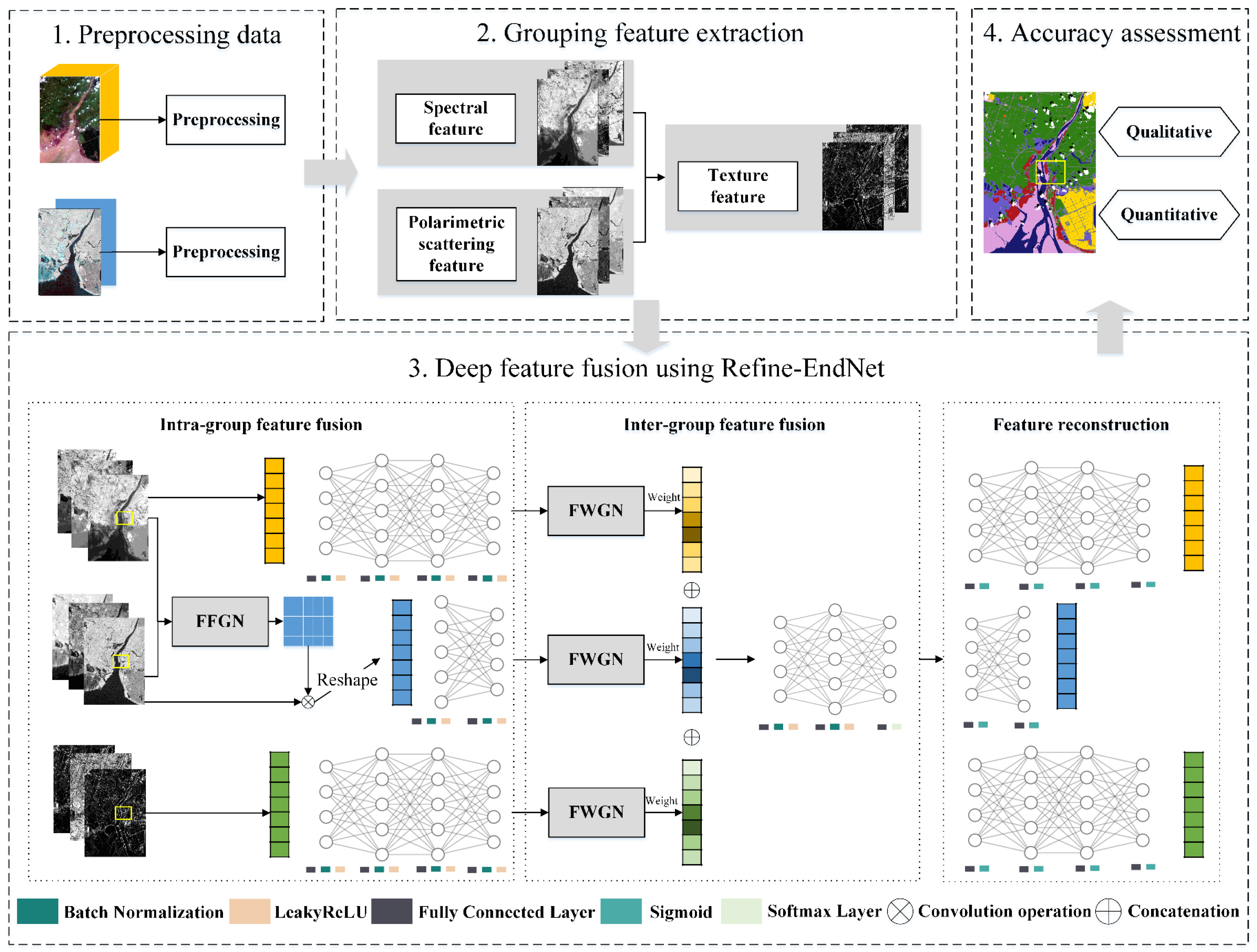
31]. However, the characteristics of SAR data and the fusion capacity of EndNet need to be further studied. The main objectives of this study were to:
Propose a new encoder–decoder framework suitable for hyperspectral and SAR data;
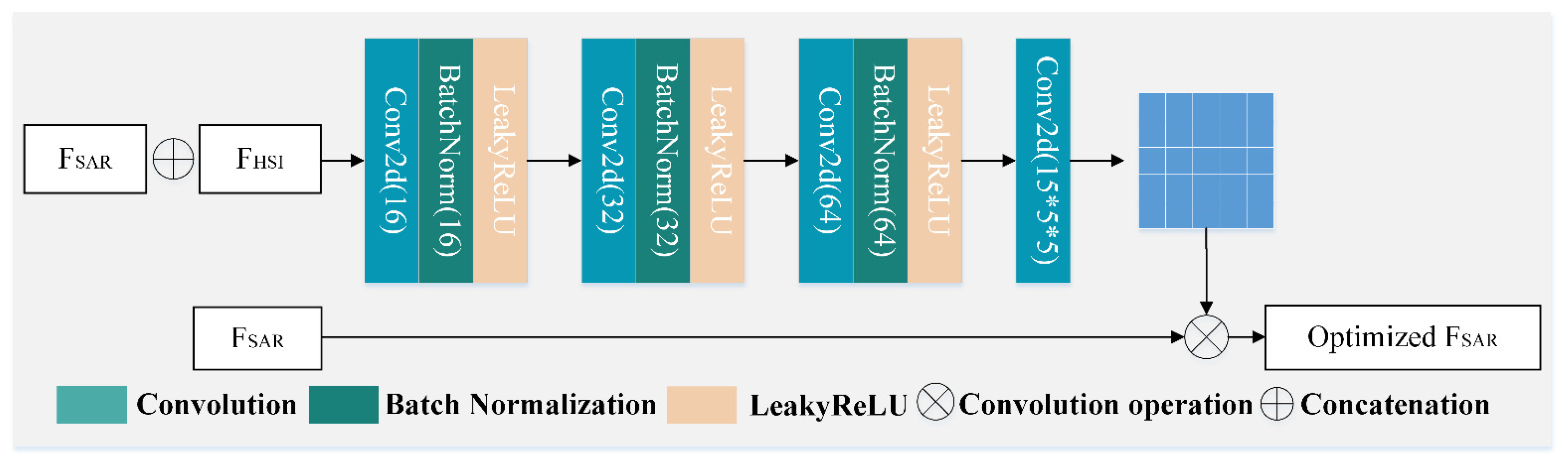
Suppress the presence of speckle noise in SAR data and the heterogeneity between hyperspectral and SAR data on classification results by the fusion filter generation network (FFGN) based on a dynamic filtering network;
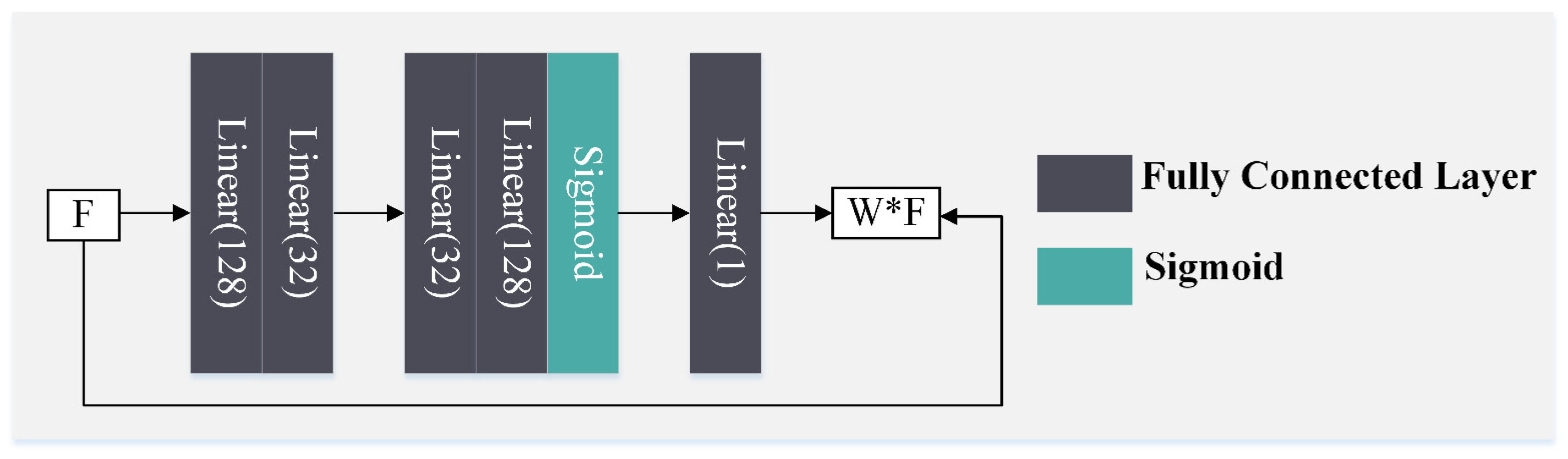
Generate the fusion weight of group features to optimize the inter-group fusion process and improve the ability of fusion by the fusion weight generation network (FWGN) based on an attention mechanism.
Improve the efficiency and accuracy of the algorithm by extracting feature information (spectral feature, texture feature, and polarization scattering feature) of ground objects from hyperspectral and SAR data and carrying out intra-group fusion.
The rest of this paper is organized as follows. In
Section 2, the details and motivations of our proposed method are introduced. In
Section 3, we show the experiments.
Section 4 and
Section 5 present the experimental results and discussion both qualitatively and quantitatively. Finally,
Section 6 makes the summary with some important conclusions.
3. Experiment Design
3.1. Study Area
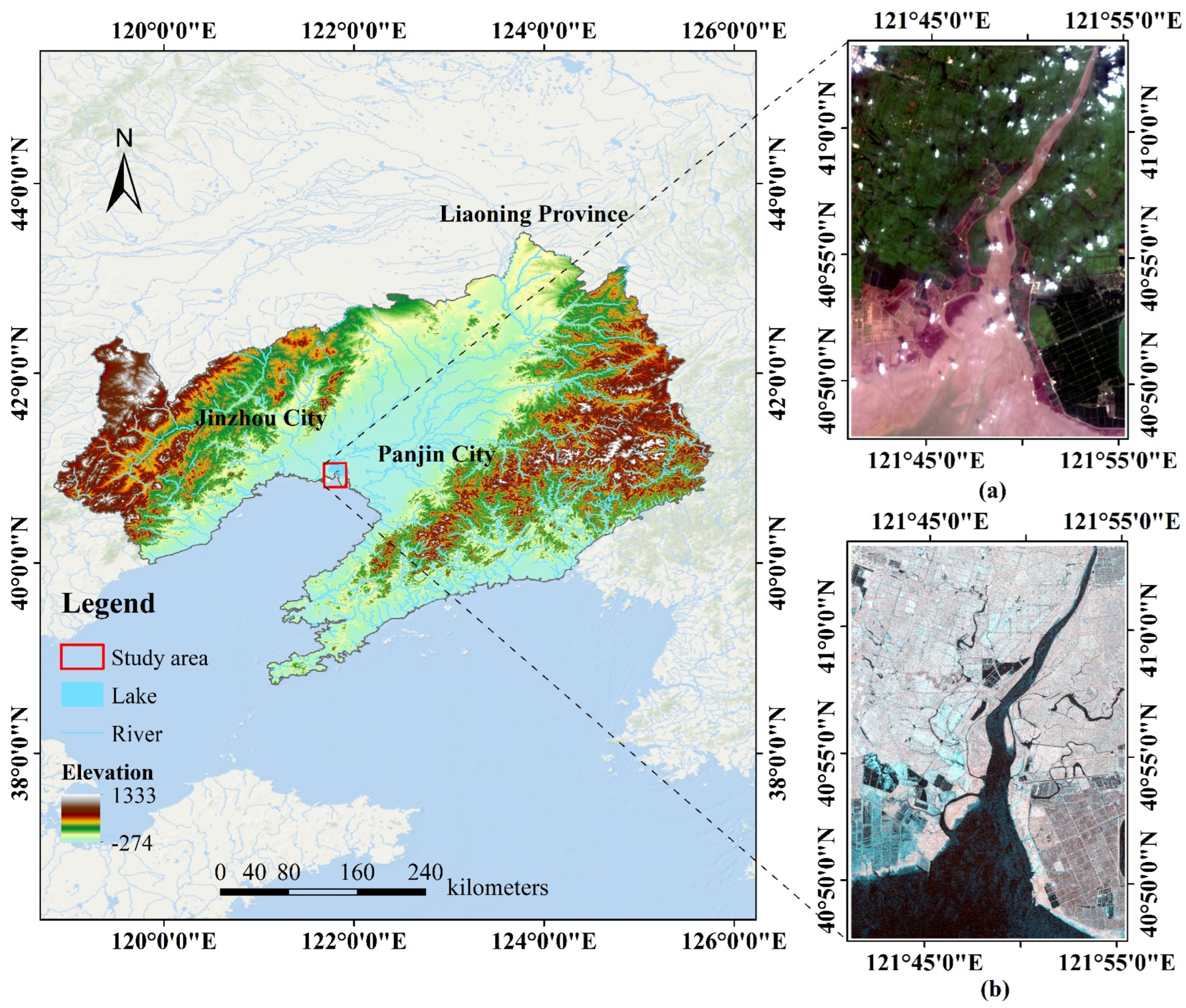
This study was carried in the Liao River Estuary National Nature Reserve in Panjin City, southern Liaoning Province, China, where the Liao River flows into the Bohai Sea (the red rectangle in
Figure 4). The Liao River Estuary National Nature Reserve consists of the world’s largest reed marsh, a large area of suaeda community, and a shallow sea. The estuarine ecosystem provides a habitat for a variety of rare waterfowl, and the wetland landscape also provides good tourism resources for the local area.
Figure 4 illustrates the geographic location of the study area. According to the standard of “Current land use classification” and the ground resolution of the ZY1-02D satellite hyperspectral data, the ground object category of the study area was determined. The sample statistics of the research area were verified by ZY1-02D satellite multispectral data and Google Earth high-resolution images (
Table 1).
3.2. Hyperspectral and SAR Data and Preprocessing
The ZY1-02D satellite was launched on 12 September 2019, and fully inherits the advanced Gaofen−5 hyperspectral sensor technology to serve the monitoring of natural resources. It mainly carries two types of payloads, a visible, a near-infrared camera and an advanced hyperspectral imager sensor (AHSI) [
7]. It covers 166 spectral bands ranging from 400 nm to 2500 nm. The spectral resolution of the visible and near-infrared band (VNIR) is 10 nm, the spectral resolution of the short-wave infrared band (SWIR) is 20 nm, and the spatial resolution is 30 m. The SAR data are an interferometric wide (IW) swath mode collected by Sentinel-1A with a spatial resolution of 5 × 20 m, which includes two polarization modes, namely vertical transmission vertical reception (VV) and vertical transmission horizontal reception (VH). Details of sensor parameters for hyperspectral and SAR data are shown in
Table 2. Auxiliary data are land use/land cover survey results and 30 m resolution digital elevation model (DEM) data in the study area.
The preprocessing of hyperspectral data includes anomalous band removal, radiometric calibration, atmospheric correction, and orthographic correction. Firstly, the spectral overlapping bands (VN: 72–76, five bands in total) between visible and short-wave infrared are eliminated. Secondly, the bands (SW: 22–27, 48–59, 82–83, 20 bands in total) affected by the water vapor absorption interval of 1357–1442 nm, 1795–1980 nm, and 2366–2384 nm are eliminated. Lastly, the bands (SW: 88–90, three bands in total) with low signal-to-noise ratio were eliminated. Radiometric calibration, atmospheric correction using FLAASH (Fast Line-of-sight Atmospheric Analysis of Spectral Hypercubes atmospheric correction), and orthotropic correction were performed for the remaining 138 bands.
The preprocessing of SAR data includes multi-looked processing, filtering, geocoding, and radiometric calibration. Firstly, the single-look complex data were multi-looked with a range number of one looks in the azimuth and five in the range, resulting in a ground-range resolution of 18.47 13.89 m. The speckle noise was removed using the Frost filter with 5 5 windows. The VV and VH images were geocoded to World Geodetic System 1984 datum and Universal Transverse Mercator Zone 50 North coordinate system via Range–Doppler terrain correction using DEM data, then radiometric calibration was carried out. Finally, they were resampled to a 30 m spatial resolution and georeferenced with hyperspectral data with an error of fewer than 0.5 pixels. The preprocessed hyperspectral and SAR datasets with a size of 965 635 were obtained.
3.3. Grouping Feature Extraction
Feature extraction (spectral, texture, polarization, and scattering features) is carried out on the original hyperspectral and SAR data to: (1) reduce redundant information or enrich the feature information; (2) improve the ability of subsequent model learning and generalization; (3) highlight the representative information of the original data and obtain the feature representation with obvious physical significance and strong interpretation.
3.3.1. Spectral Feature
Spectral features can be divided into dimensionality reduction and spectral index features [
17]. The first part includes the first three principal component features obtained by the principal component transformation of all spectral bands of the hyperspectral data, the first five band features obtained by the minimum noise transformation of all spectral bands, and the commonly used ρ12, ρ21, ρ33, ρ55, ρ102, ρ125 of a total of seven multispectral bands. It aims to remove redundant information while preserving the main information of the spectral band as much as possible. The second part (shown as
Table 3) includes the Normalized Difference Vegetation Index (NDVI) [
34], the Normalized Difference Water Index (NDWI) [
35], the Anthocyanin Reflectance Index2 (ARI2) [
36], the Photochemical Reflectance Index (PRI) [
37], the Transformed Chlorophyll Absorption in Reflectance Index (TCARI), and the Optimized Soil-Adjusted Vegetation Index (OSAVI) [
38]. It aims to reflect information on canopy structure, pigmentation, leaf nitrogen content, and environmental humidity.
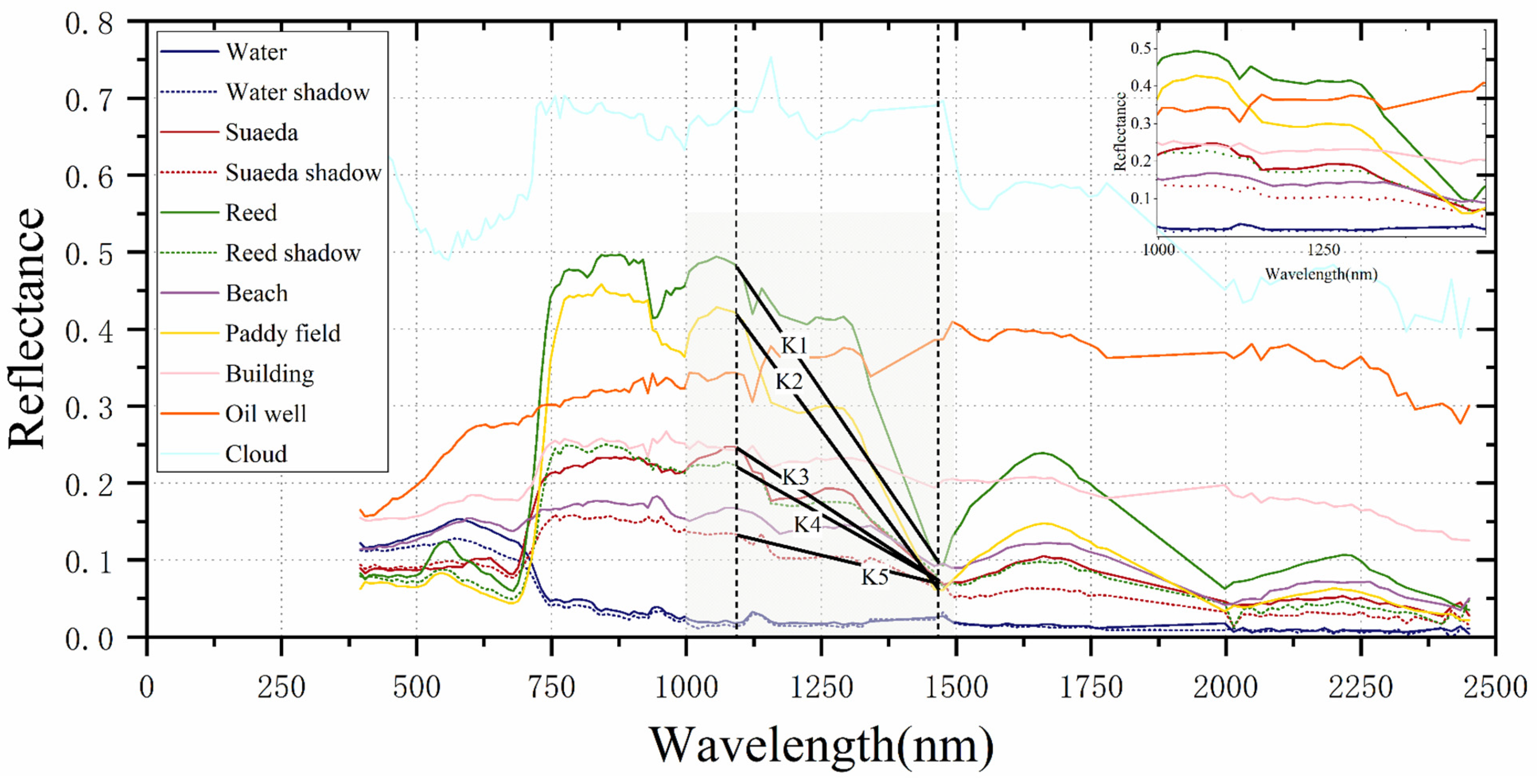
According to the rich geometric characteristics of the hyperspectral reflectance curve, the differences between vegetation under the shadows and vegetation in the bright area are further explored based on the NDVI, to improve the separability between the shadows and the salt marsh vegetation.
Figure 5 illustrates the spectral characteristic curves of main land cover types in the study area, where the reflectance of vegetation under the shadows is much lower than the vegetation in the bright area at the near-infrared band. As shown in
Figure 5, the reflectance of reed under the shadow is similar to suaeda in the bright area. Specially, the difference is greatest at 1089.23 nm and 1475.86 nm is the strong absorption position of all vegetation spectral curves. Therefore, the slope
in these two spectral intervals can suppress vegetation information under shadows and highlight vegetation information in the bright area. Moreover, NDVI can effectively distinguish water from vegetation. In addition, slope
can also effectively suppress non-vegetation objects such as buildings and clouds, while the red vegetation has the maximum reflectance in the red band. The hyperspectral shadow vegetation index (HSVI) Equation (7) is proposed to achieve reed > paddy field > suaeda > vegetation under the shadow.
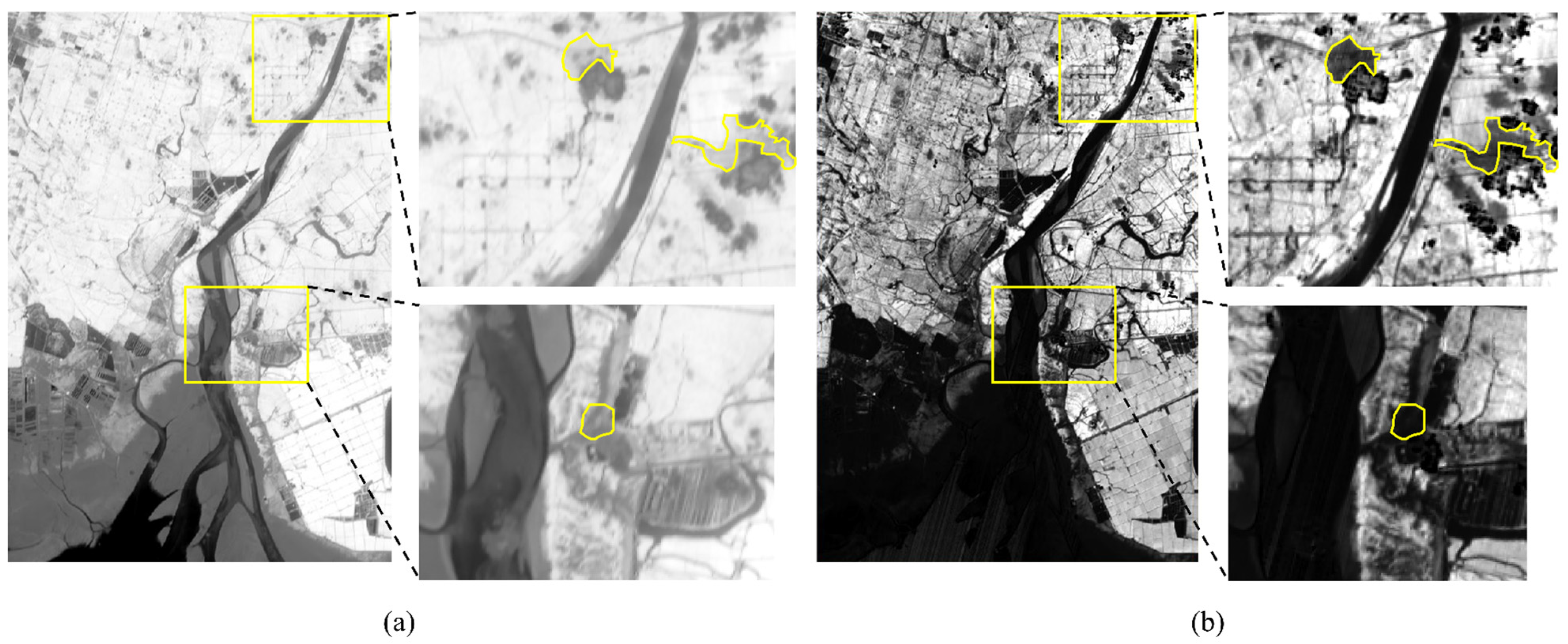
Figure 6 shows the comparison between NDVI and the proposed index, which can effectively distinguish the three types of vegetation from the shadows.
3.3.2. Polarimetric Scattering Feature
The polarization scattering feature is used to represent the original SAR data, including matrix elements, polarization decomposition, and backscattering features (
Table 4). They are designed to reflect the different geometric and dielectric properties of ground objects [
39,
40,
41,
42]. The
-
-
decomposition method proposed by Cloude and Pottier is used to extract the eigenvalues and eigenvectors of dual-polarization (DP) SAR data by covariance matrix [
] Equation (8).
,
,
, and eigenvalue parameters are calculated [
43,
44].
where the matrix elements include
and
, namely diagonal elements in the covariance matrix; the polarization decomposition feature includes Entropy (
), Anisotropy (
), Alpha (
), eigenvector (
), Shannon Entropy (
), Pseudo Probability (
) and Lambda (
). The backscattering feature includes VV, VH, and the intensity information of cross-polarization ratio and cross-polarization difference.
3.3.3. Texture Feature
Although fully connected neural networks do not lose spatial information, local information reflected by texture features contributes significantly to classification accuracy [
45]. Grey-Level Co-occurrence Matrix (GLCM) is a common method to extract texture features [
5,
18,
36].
Table 5 illustrates different variables that reflect the texture information in GLCM. Based on the principal component transformation of hyperspectral data, the first three principal components are selected to extract the texture features (mean, variance, heterogeneity, contrast, dissimilarity, and correlation). For SAR data, identical texture features are extracted based on backscattering features, matrix elements, and Shannon Entropy.
3.4. Experimental Setup
Experimental environment: the experiment was carried out on an Intel CPU with 2.30 GHz and 86 GB RAM. A NVIDIA GeForce RTX 3090 GPU with 24 GB of memory under CUDA version 11.3 was also employed. The deep learning framework is Pytorch1.11.0 in this study.
Experimental parameters: the proposed network was trained using the objective function mentioned earlier and an Adam optimizer [
46] and a batch size of 64. The initialized learning rate was set to 0.001. The size of each FC layer was selected in the range of {16, 32, 64, 128, 256}, which is the same as EndNet. Moreover, the momentum is parameterized by 0.1. In intra-group feature fusion and feature reconstruction, the two branches that spectral feature and texture feature were input have four FC layers with the size of 16, 32, 64, and 128. More specifically, one of the branches that polarization and scattering feature was input comprised two FC layers with the size of 64 and 128. Settings above were aimed to keep the feature dimensions of the three branch networks the same. The influences of hyperparameters such as epoch, patch size, and Convolution kernel size of Refine-EndNet on classification accuracy were discussed in detail in the following sections.
Evaluation indexes: the classification performance of Refine-EndNet and other MDL methods were quantitatively evaluated by overall accuracy (OA), average accuracy (AA), and Kappa coefficient. Their visual effects of them were qualitatively evaluated.
3.5. Comparison of Experimental Parameters
3.5.1. Epoch of Refine-EndNet
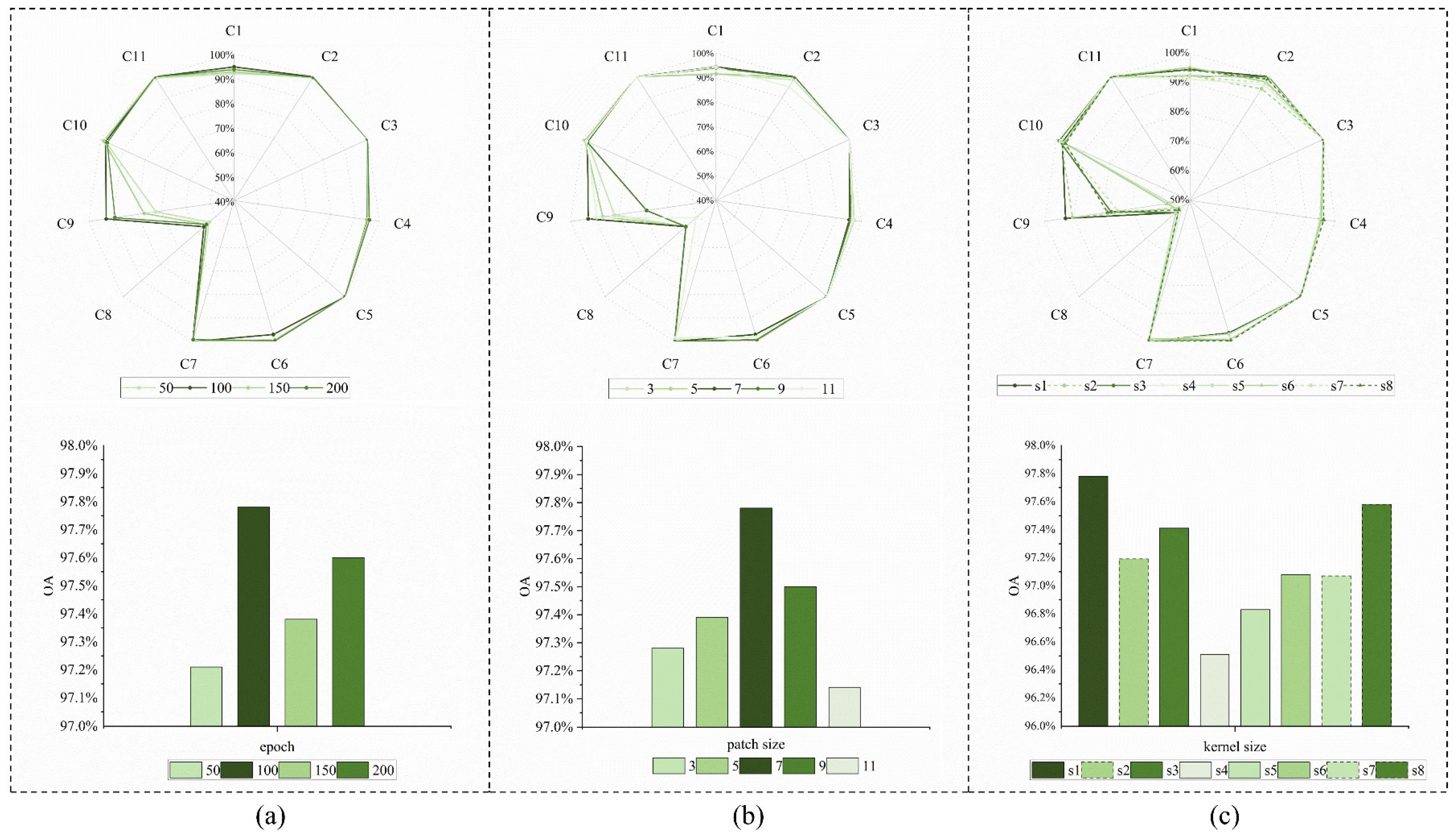
For Refine-EndNet,
Figure 7a demonstrates the influence of the epoch on the classification accuracy, which compares the overall classification accuracy of 50, 100, 150, and 200 epochs. Overall, they are all between 97% and 98%, and the result of 100 epochs at 97.78% is the best.
3.5.2. Patch Size of Refine-EndNet
Figure 7a,b illustrates the impact of the different patch sizes on classification accuracy. With the gradual increase in patch size, the classification accuracy increases first and then decreases, and the overall accuracy is between 97% and 98%. The FFGN is used for pre-fusion hyperspectral and SAR data, for different categories of ground objects, and the classification accuracy is highest with the patch size of 7 × 7.
3.5.3. Convolution Kernel Size of Refine-EndNet
Figure 7c illustrates the influence of strategies with various convolution kernel sizes on the classification accuracy for Refine-EndNet. There are a total of eight strategies identified, numbered S1 to S8. S1 represented the size of the convolution kernel as 1 × 1, S2 represented 3 × 3, S3 represented 5 × 5, S4 represented 7 × 7, S5 represented 3 × 3 and 1 × 1, S6 represented 1 × 1 and 3 × 3, S7 represented 5 × 5 and 1 × 1, and S8 represented 1 × 1 and 5 × 5. The overall classification accuracy of S1 and S8 is the highest. For the oil well, S1 has a higher classification accuracy than S8.
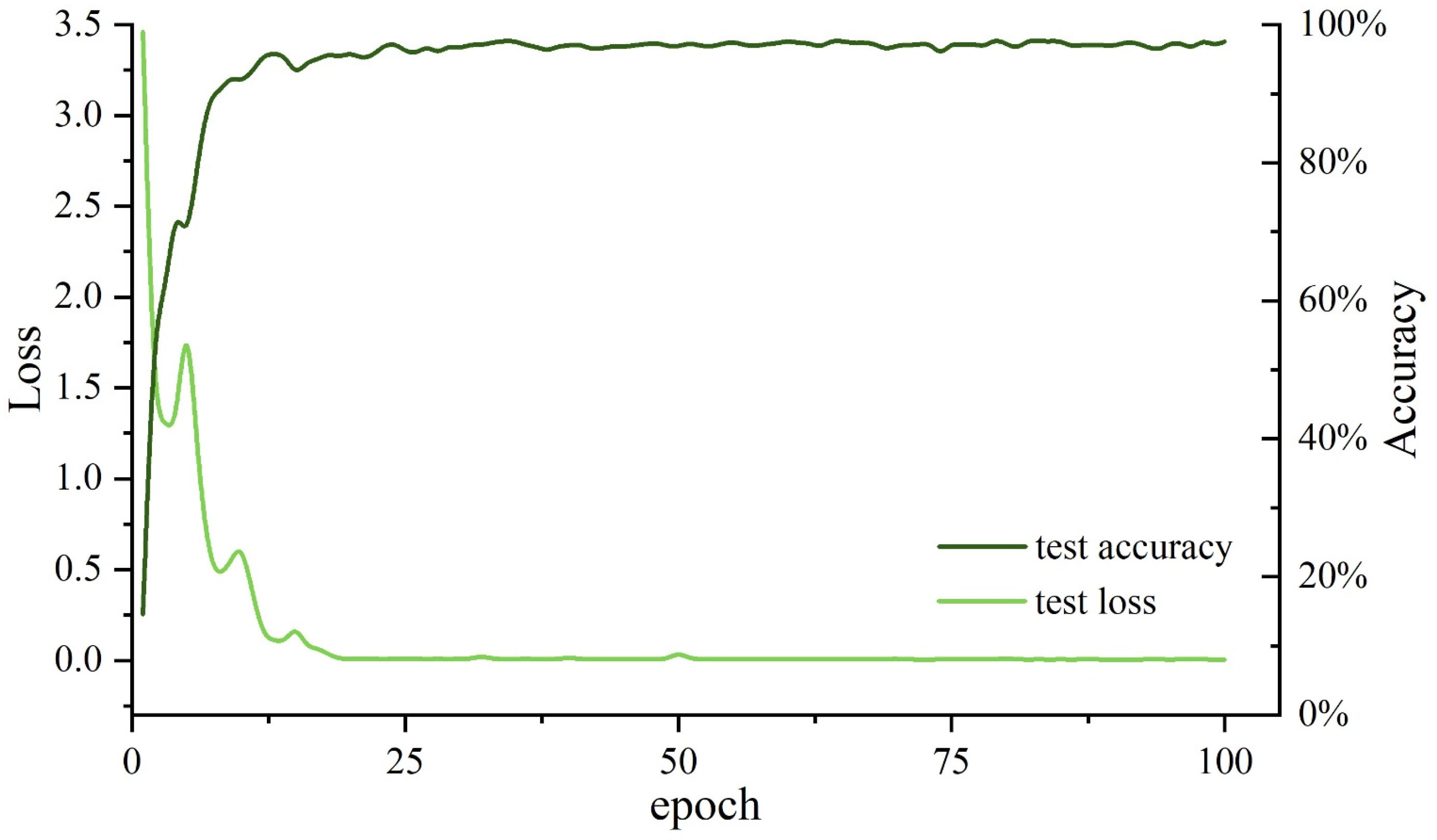
Overall, we select the epochs of 100, a patch size of 7 × 7, and a convolution kernel size of 1 × 1 as hyperparameters to train our proposed deep feature fusion model. The training curves consist of test loss and test accuracy are shown in
Figure 8.
6. Conclusions
The accuracy of ground object classification is guaranteed by the complete fusion of complementary information from multimodal remote sensing data. In this study, a deep feature fusion method that follows an encoder–decoder framework is proposed for adapting hyperspectral and SAR data. It has two main components that aim to fully fuse spectral, texture, polarization, and scattering information and suppress the heterogeneity between hyperspectral and SAR data.
- (1)
Intra-group feature fusion: Grouping features are optimized and fused by multi-branched fully connected neural networks, particularly for spectral information of hyperspectral data. Furthermore, the FFGN is utilized for pre-fusion to directly align the features of multimodal remote sensing data. It can effectively suppress the speckle noise of SAR data and the heterogeneity between hyperspectral and SAR data. However, the information of clouds and shadows are also brought into SAR data.
- (2)
Inter-group feature fusion: The FWGN added independent weights in the spatial dimension to assess the importance and contribution of information from encoder layers for classification results and enhanced fusion capacity.
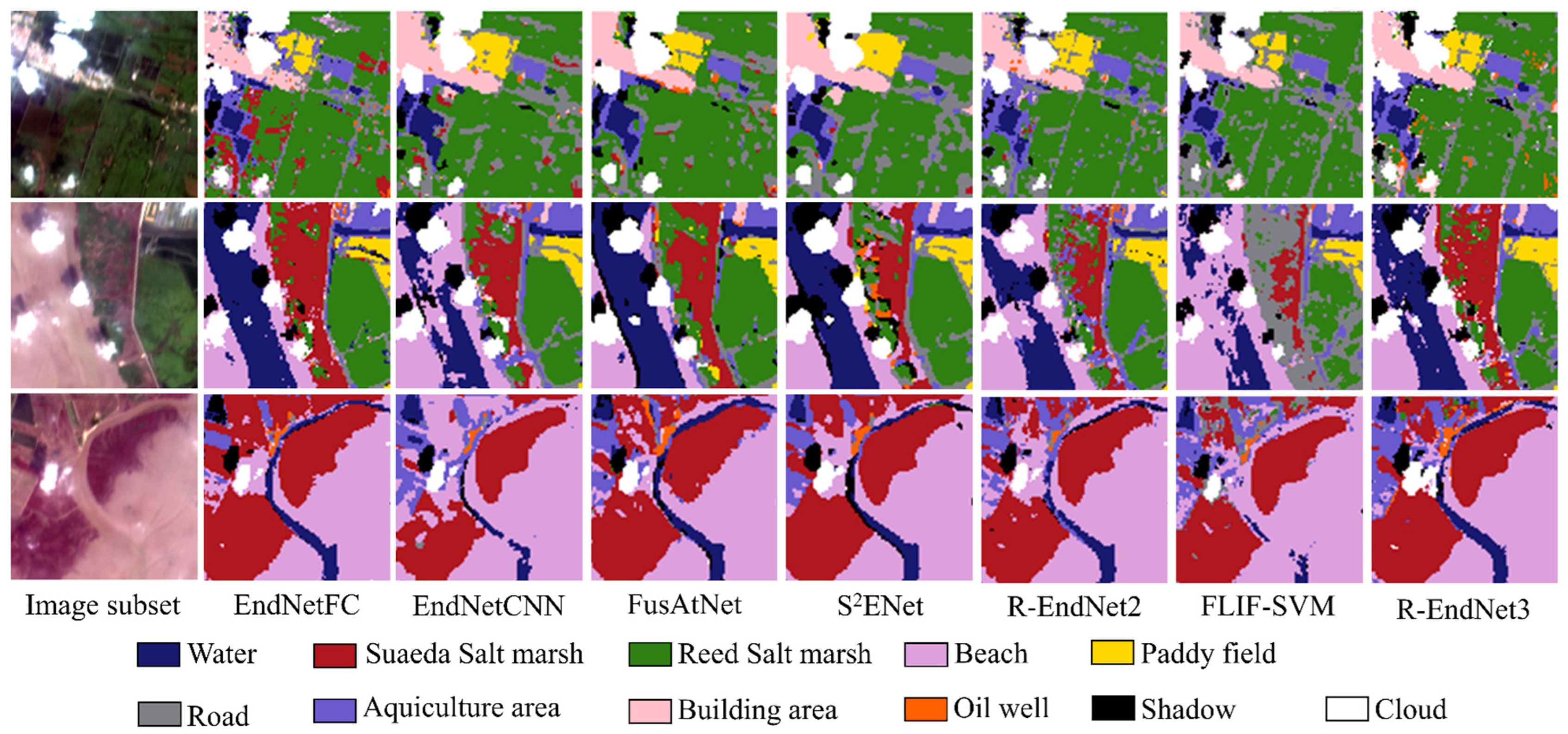
Our proposed method achieved a competitive classification accuracy of approximately 97.78%, providing an improvement of approximately 2.64% and 1.27% relative to EndNets and S2ENet, respectively. Although EndNet, FusAtNet, and S2ENet illustrated relatively equal strengths for fusing multimodal remote sensing data, Refine-EndNet is more advantageous for fusing hyperspectral and SAR data, particularly for hyperspectral data that are affected by clouds and shadows. Overall, our proposed method can realize the high-precision classification of ground objects and contribute to the deepening application of hyperspectral and SAR data.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}