The standard configurations of FM1 and FM2 may be not optimal. The sensitivity to the specification of the turbulent fluctuations and effective diffusion is examined below.
6.1. FM1
Two key choices were made in the definition of the default FM1 configuration. First, we chose to update the turbulent fluctuations in FM1 at every timestep, with
being equal to the LES timestep,
. The validity of this prescription is not guaranteed as the appropriate turbulence timescale may differ from the numerical timestep. From the (temporal) autocorrelations,
the timescale of the fluctuations,
, may be estimated from the e-folding timescale,
(Values of
are listed in
Table A8). Second, we chose the spatially averaged turbulence coefficients,
and
, for the canopy and overlying region, Equation (
7).
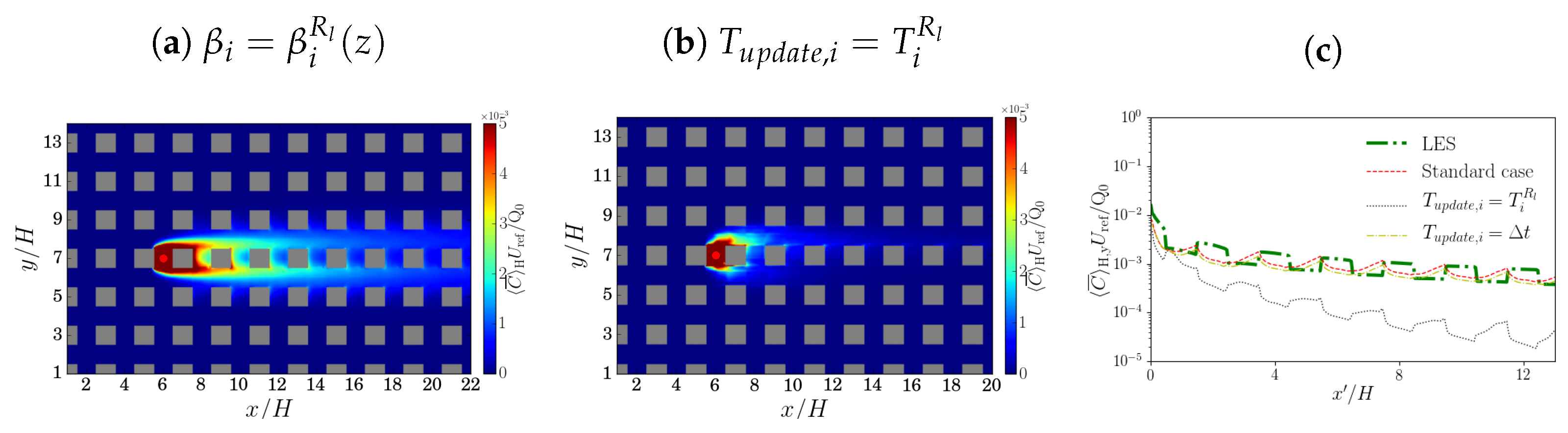
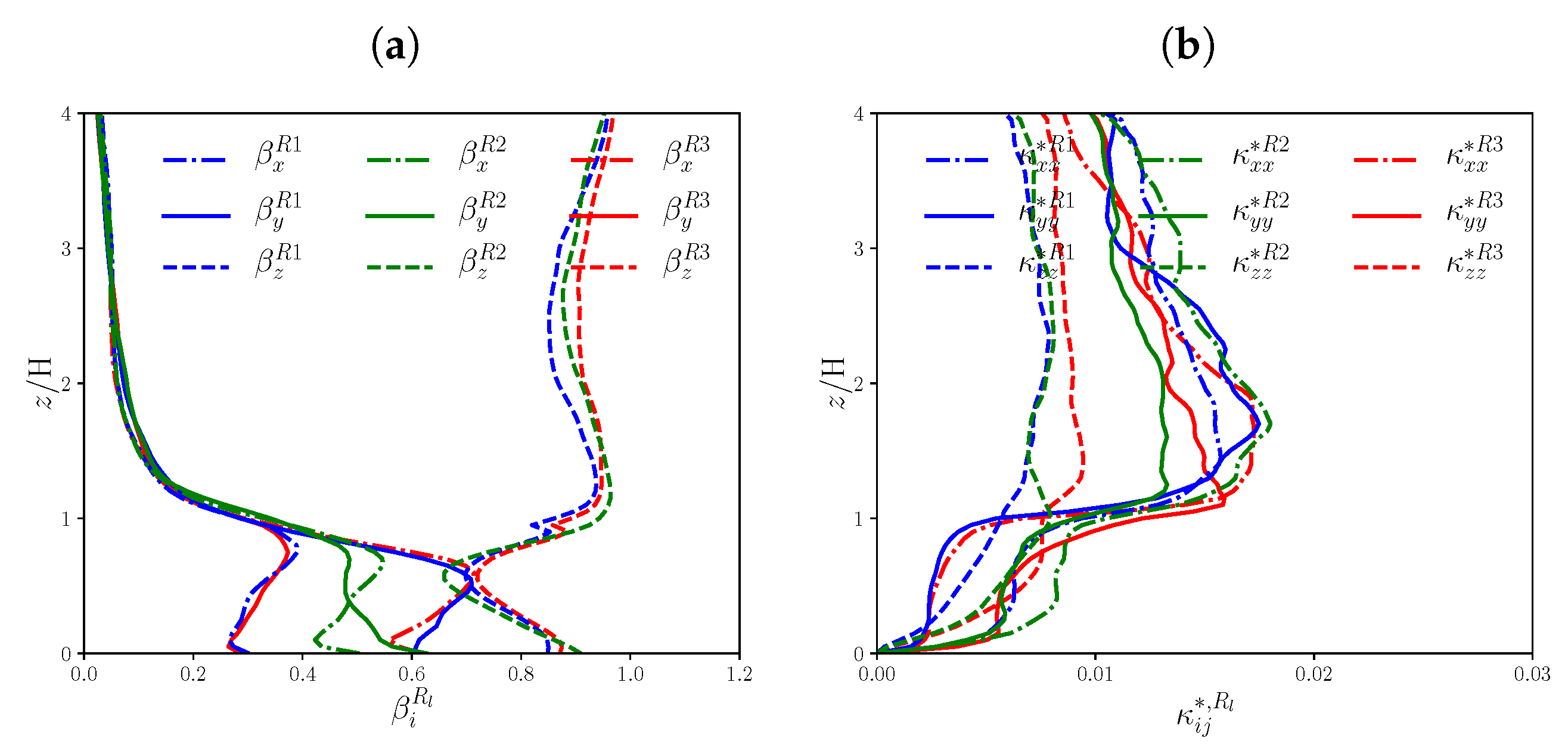
The effects of these two choices are now assessed. First, we consider vertical profiles of the turbulence coefficients,
(
Figure A5a).
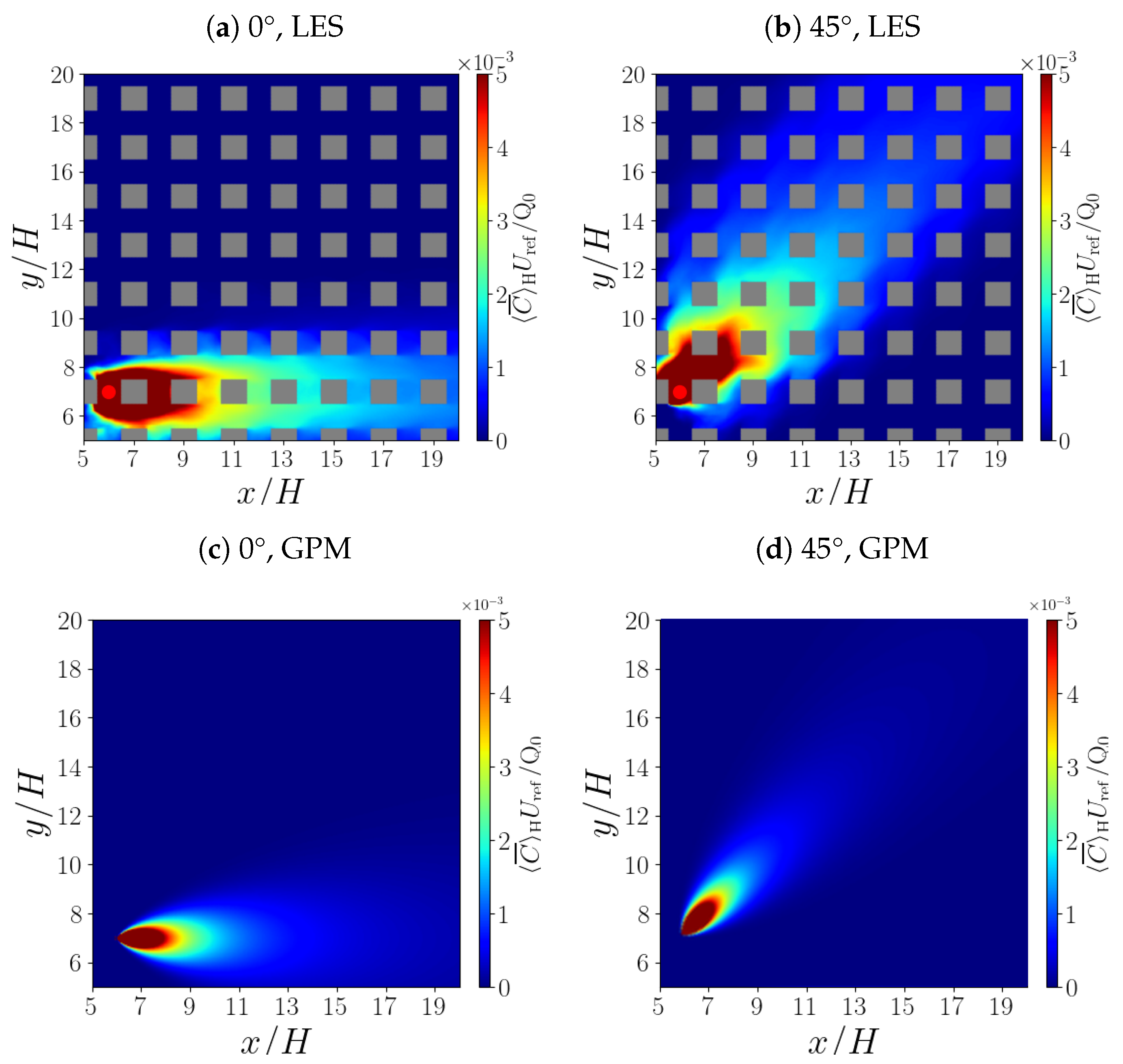
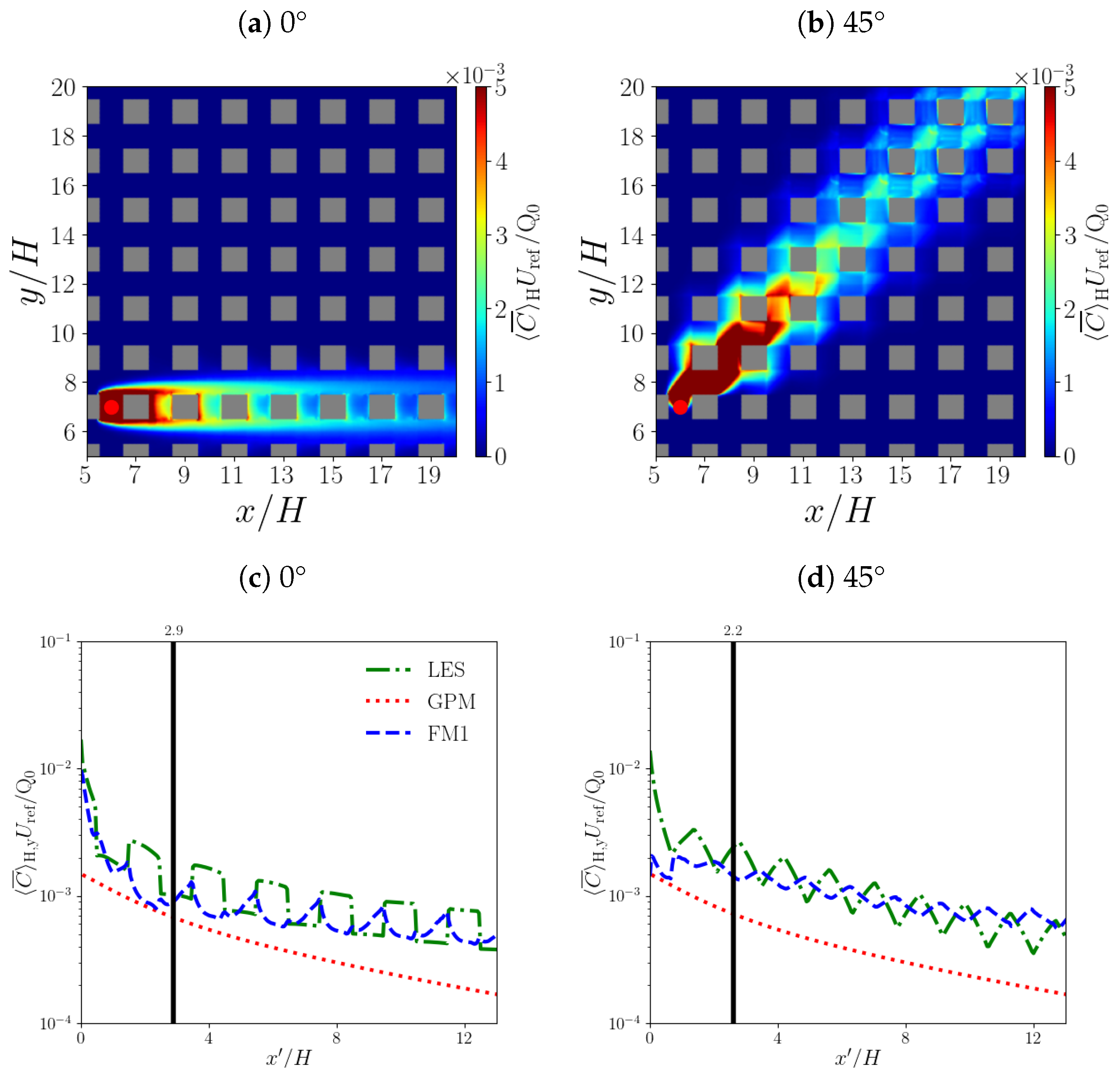
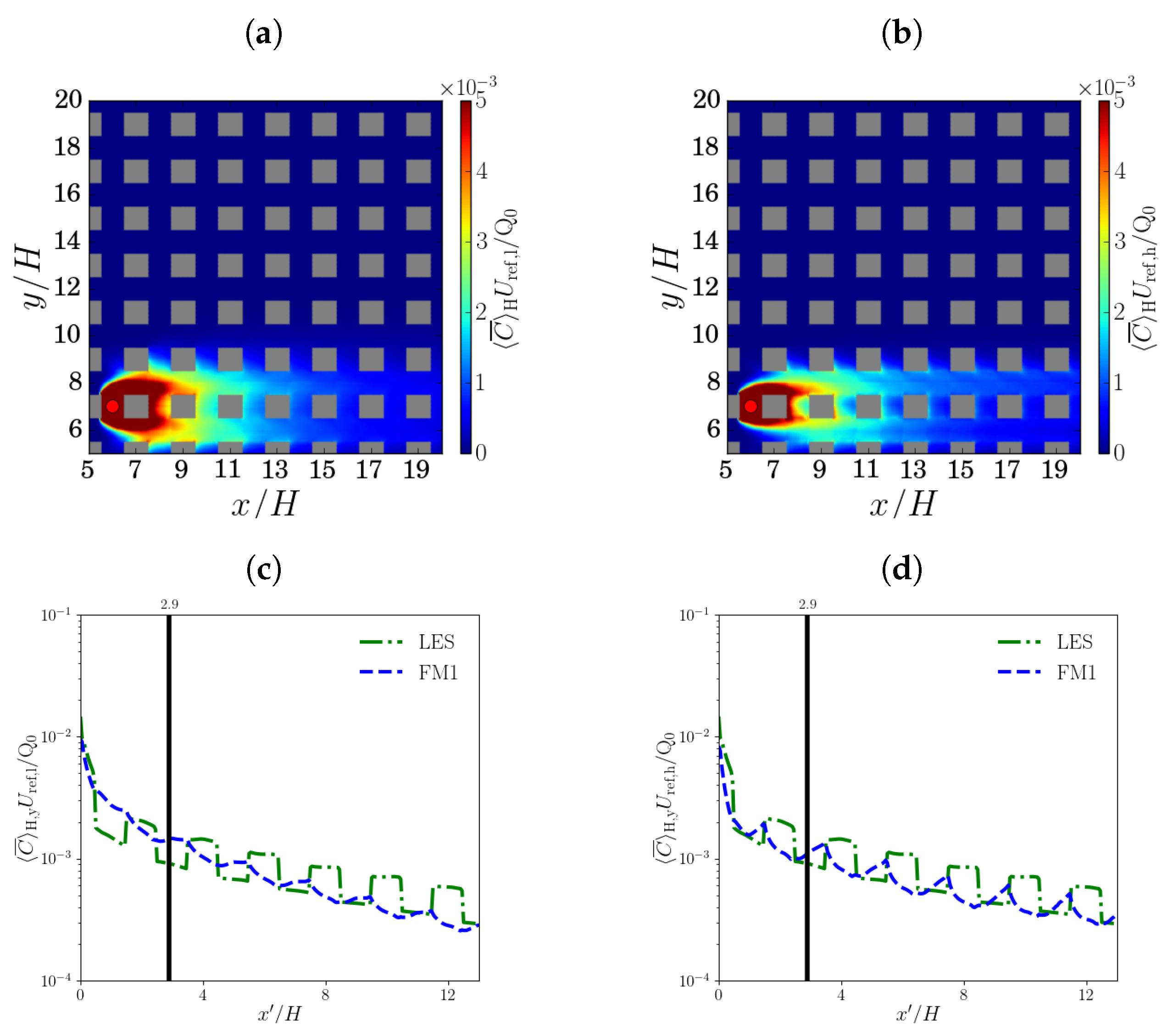
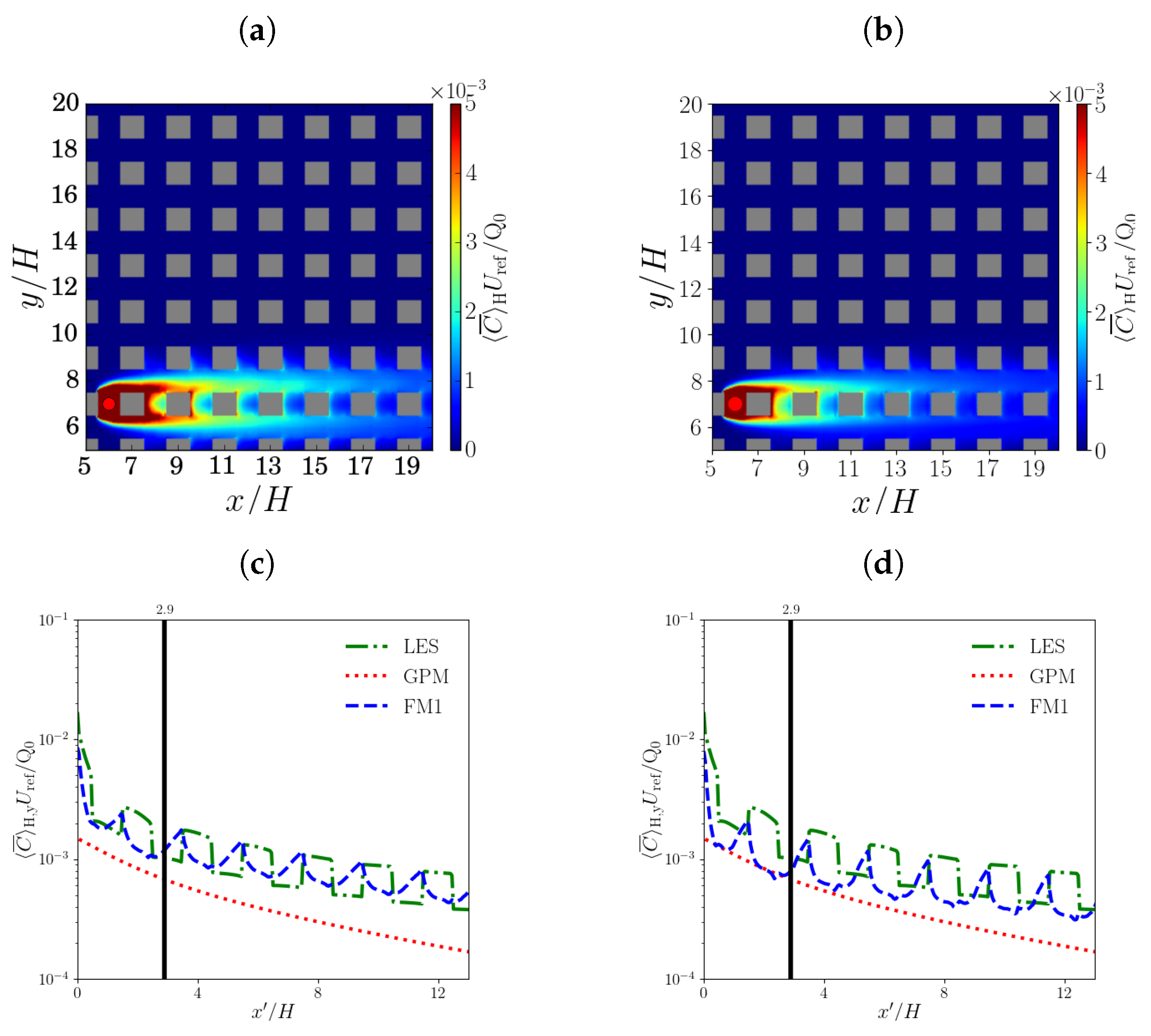
Figure 9a shows that the spatial structure of the mean concentration field at 0° is essentially unchanged from that for the standard configuration with
and
(
Figure 5a). Since the differences between
and
are not very large (e.g., the maximum relative error is ∼50%), FM1 should not be especially sensitive to the inclusion of the vertical dependence of the turbulence coefficients. Indeed, the
is 0.25 using
(
Table 1) and 0.51 with
(
Table 2). It should be noted, however, that performance does not improve when the vertical dependence is specified. The reasons for this are unclear, but the change in the averaging region (from the canopy or overlying atmosphere to individual vertical levels) may play a role. The assumption that the turbulent fluctuations are linearly proportional to the mean velocity components (Equation (
6)), which underlies the definition of the
, may break down on smaller vertical scales due to overfitting. Furthermore, the
values are more subject to sampling effects.
Second, the turbulent fluctuations are updated at the e-folding timescale, i.e.,
. From the mean concentration field at 0° (
Figure 9b), downwind dispersion is greatly reduced and the prediction is clearly worse. This is confirmed by the statistical metrics (
Table 2): for example,
increases from 0.25 (
Table 1) to 1.96 when the turbulent fluctuations are updated at a time interval of
rather than
. Evidently choosing
to be as short as possible improves the prediction. This is plausible inasmuch as the SDE, Equation (
8), is equivalent to a diffusion equation only in the limit of white noise, i.e., a vanishing correlation timescale [
22]. Physically, defining the turbulence timescale from the e-folding timescale, like the related integral timescale [
37], amounts to specifying a length scale; however, the SDE, or more generally Brownian motion, has no spatial dependence or spatial scales. The choice
effectively imposes an artificially large length scale, which may be inconsistent with turbulent diffusion at the smallest possible scales.
The lateral profiles (
Figure 9c) confirm the preceding findings. Prescribing the vertical profile of the turbulence coefficients,
yields nearly identical results to the standard configuration,
and
. Updating the turbulent fluctuations less frequently, i.e.,
, causes the profile to decay too rapidly with downwind distance. For brevity, the results for
and
are not shown because they are very similar to those for the preceding case,
and
.
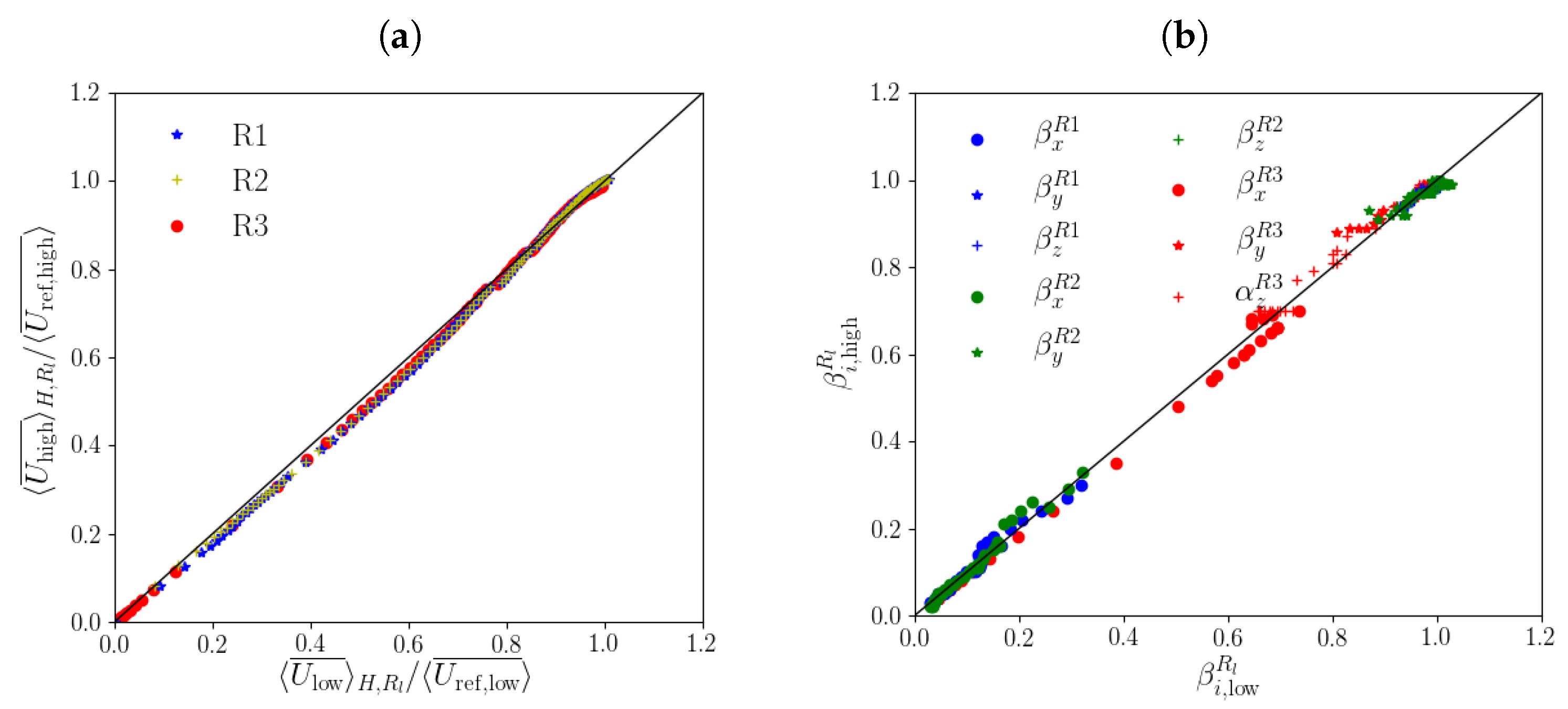
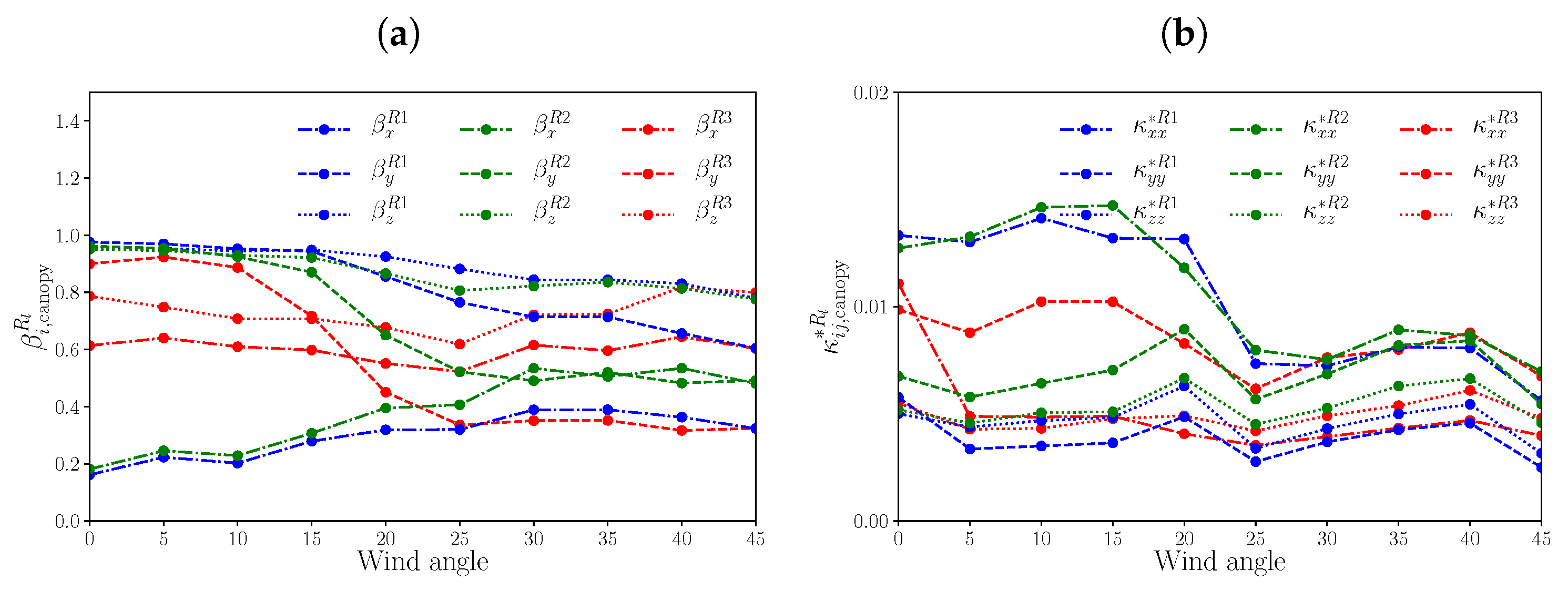
Aside from the vertical structure and correlation timescale, assumptions were also made about the horizontal structure and applicability to other wind directions. The dependence of
on the wind direction is illustrated in
Figure 10a. Values are not independent of the angle. To assess the validity of the choice of 45° for the standard configuration, the turbulence coefficients for 0° (
Table A9) are applied to an FM1 calculation for 0°. The scalar field (
Figure A6a) shows enhanced cross-stream dispersion compared with the standard configuration; the lateral profile (
Figure A6c) shows enhanced contrast between the windward and leeward walls. A slight degradation of the performance is seen in the statistical performance measures (
Table 2), e.g., the NMSE increases from 0.25 to 0.37. Using the turbulence coefficients for the same wind direction does not necessarily help.
The sensitivity to the spatial variation of the
is assessed by considering the same turbulence coefficients for all repeating units
. Compared with
, there are lower concentrations at the leeward walls (
Figure A6b) and the concentration decays more rapidly in the downwind direction (
Figure A6d). Neglecting the spatial variation of the turbulence coefficients has a negative impact: the
increases from 0.25 to
(
Table 2). Nevertheless, the sensitivity to the spatial variation of the turbulence coefficients is much smaller than that to a spatially varying mean flow.
6.2. FM2
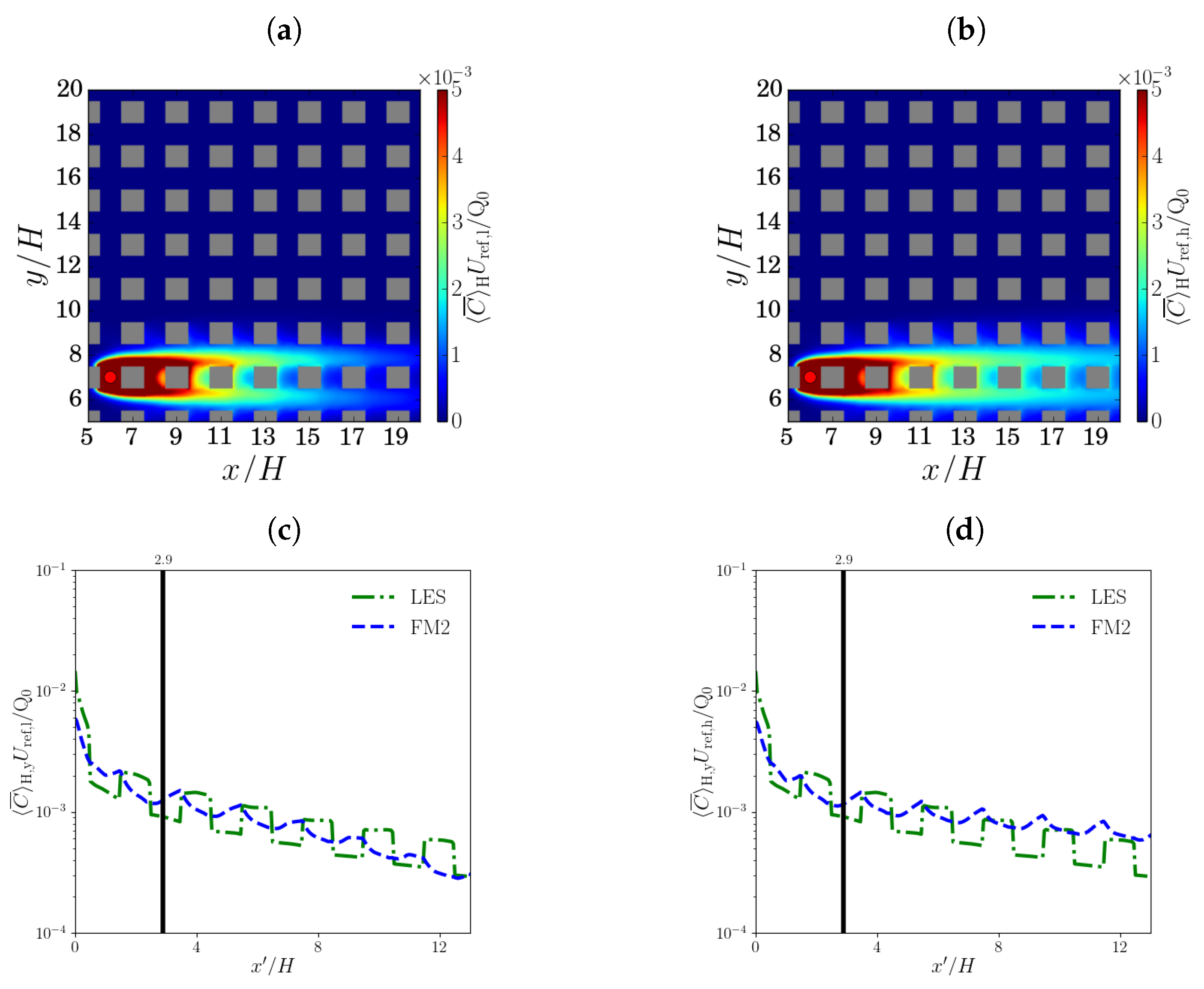
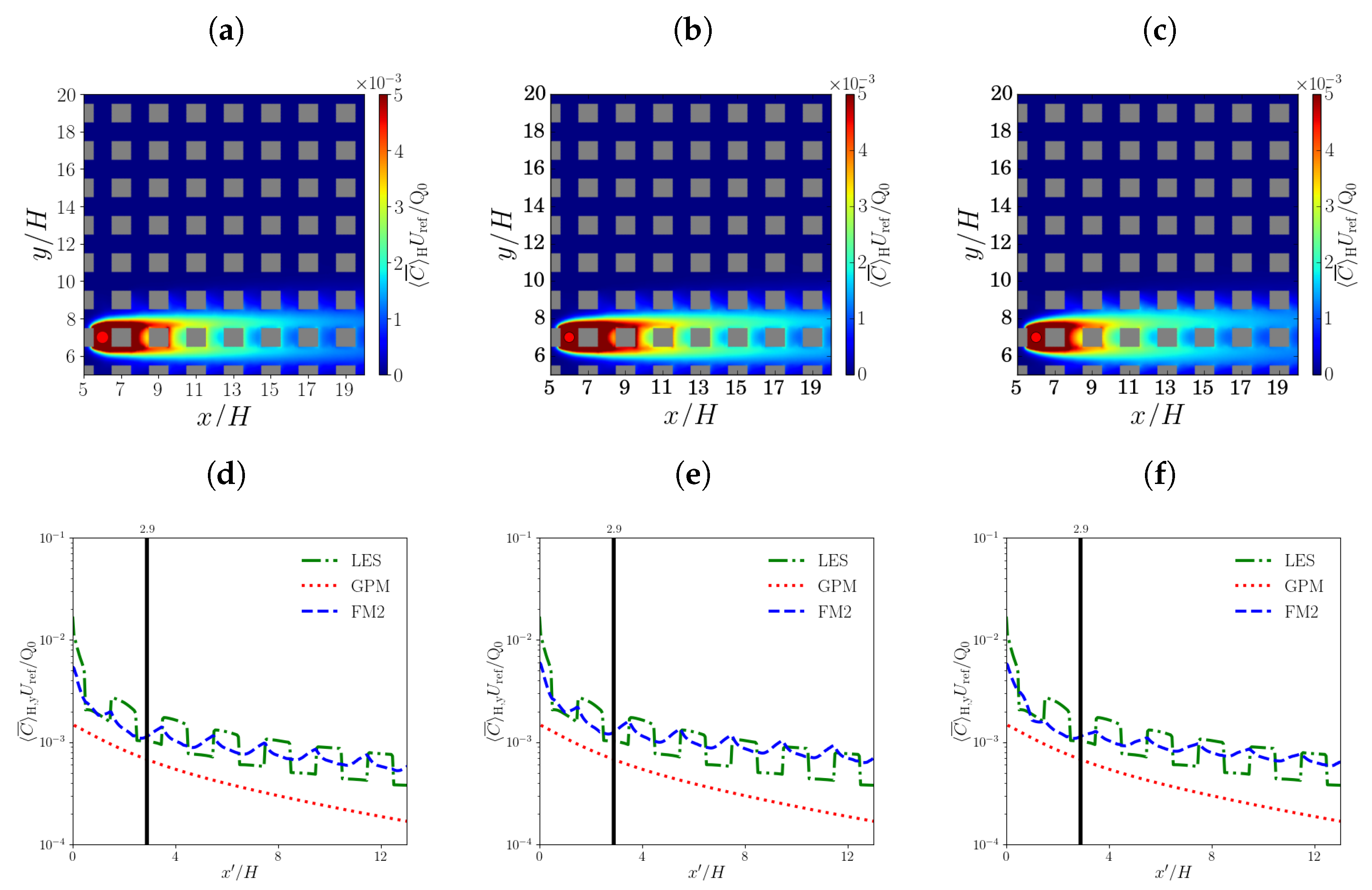
The default FM2 configuration also relies on spatial averages over the canopy and the overlying region to determine the effective diffusivities at 45°. Different specifications of the effective diffusivities are now applied to simulations for 0°.
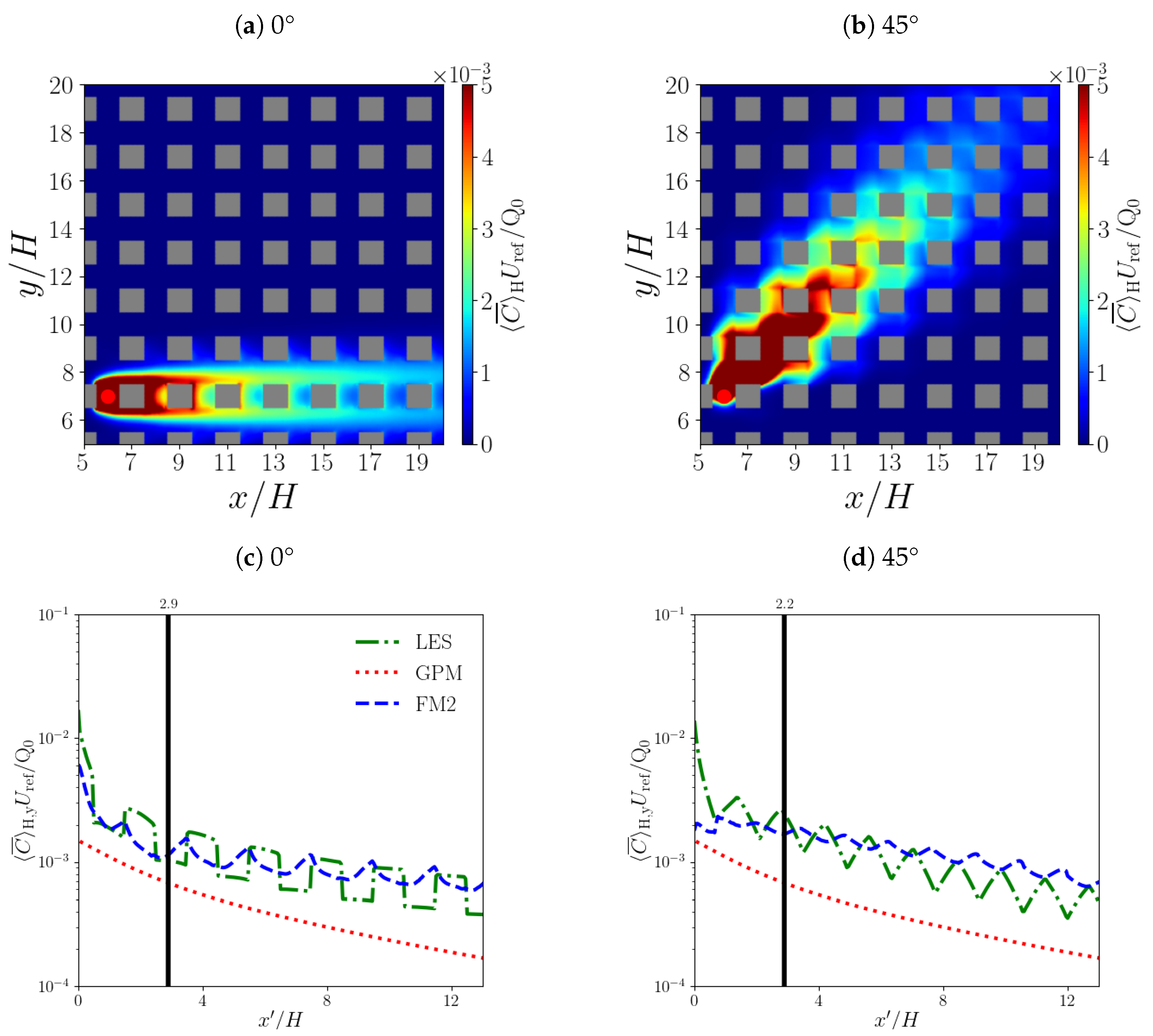
First, prescribing the vertical profiles,
(
Figure A5b), has a small effect on the scalar field (
Figure A7a) and lateral profile (
Figure A7d). The statistical metrics indicate a small degradation when the vertical profiles are used (e.g., NMSE increasing from 0.40 to 0.46;
Table 2), as with FM1. Second, the effective diffusivities are defined using another wind direction. The assumption that
is independent of the angle is not accurate (
Figure 10b). Hence,
and
(
Table A9) are tested in place of the effective diffusivities at 45°. The scalar field (
Figure A7b) and lateral profile (
Figure A7e) show higher downwind concentrations and the errors decrease slightly (
Table 2). Third, horizontally averaged diffusivities,
, are used for all repeating units inside the canopy. Neglecting the spatial dependence lowers the concentrations along the leeward walls in the near-field region (
Figure A7c) and weakens concentration gradients (
Figure A7f). However, the statistical performance measures do not show much change (e.g., the
decreases from 0.40 to 0.39).
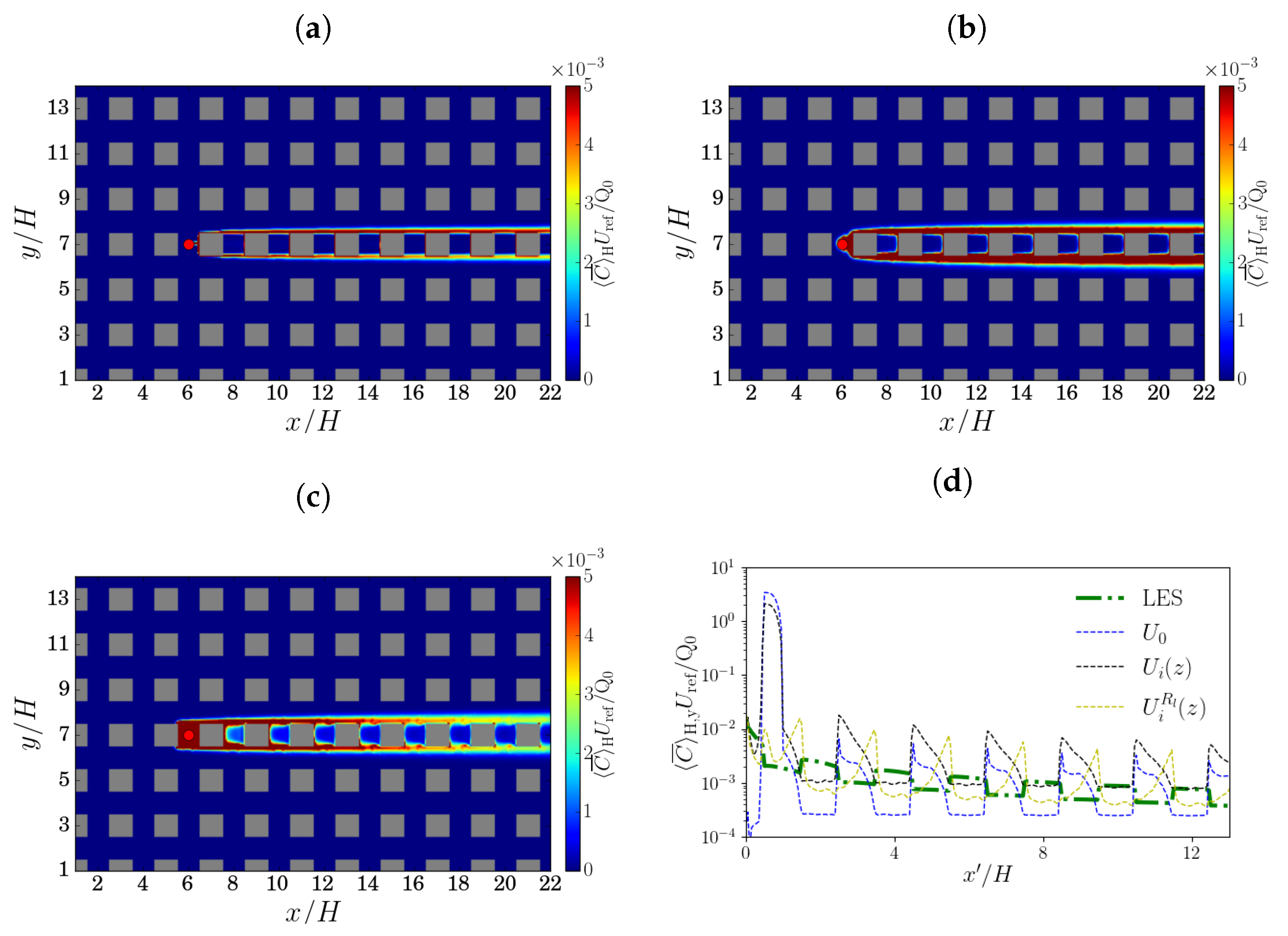
The sensitivity to in FM2 is weaker than the sensitivity to in FM1. Not only does FM1 show great sensitivity to the correlation time, neglecting the dependence on the repeating units degrades performance. A possible explanation is that only affects diffusion, while affects advection and induces turbulent diffusion, which could lead to less robust behaviour.
The standard configuration of FM2 is limited to diagonal components of the effective diffusivity tensor,
. Referring to the “microscopic” definition of the diffusivity, Equation (
11), diagonal components,
, refer to motions arising from aligned fluctuations in the same direction. For a homogeneous medium and isotropic fluctuations, the off-diagonal components vanish,
, as with the molecular viscosity of a Newtonian fluid, but this is not necessarily true for an inhomogeneous medium or one with boundaries. Hence it is possible that a better parameterisation could be obtained if the effective diffusivity included off-diagonal contributions.
Off-diagonal components can be calculated in the same way as the diagonal components (i.e., using Equations (
10) and (
11) with
). Values for 0° and 45° are listed in
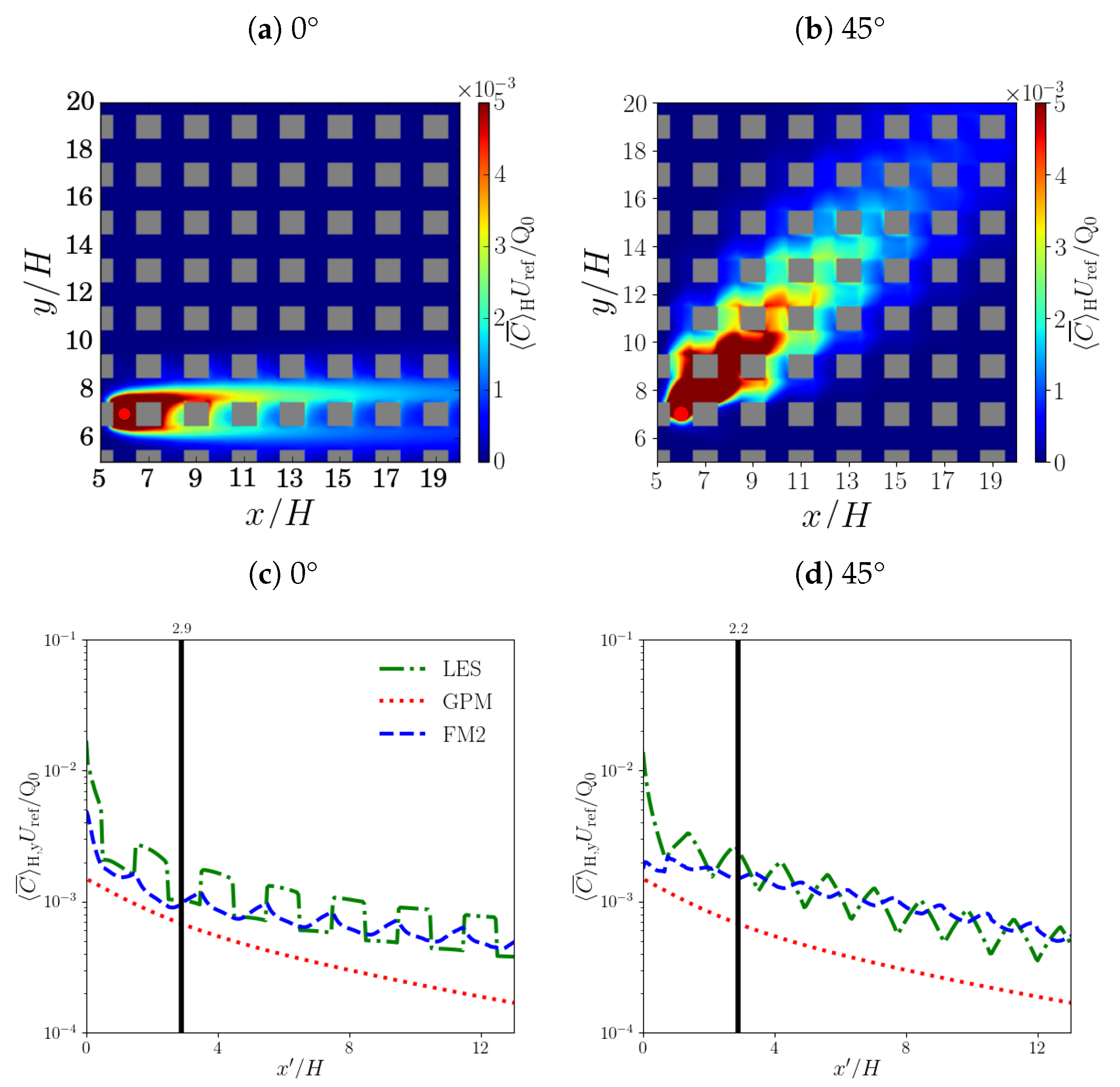
Table A10. The sensitivity to the inclusion of off-diagonal components is illustrated in
Figure 11: at 0°, the scalar field is asymmetric along the centreline, while at 45°, there are minimal differences with respect to the standard configuration. The asymmetric appearance for 0° may be related to the
and
components, which are always positive for repeating units inside the canopy: these components introduce correlations between
x and
y fluctuations in the scalar field, i.e., anisotropy. The inclusion of the off-diagonal components clearly degrades performance at 0°; the effects are much smaller at 45°. This is confirmed by the statistical metrics (e.g., the NMSE inside the canopy increases from 0.40 to 0.74 in the former case and from 0.60 to 0.68 in the latter case;
Table A5).
The negative impact of the off-diagonal components is perhaps surprising inasmuch as a parameterisation that takes fuller account of the turbulence statistics and does not require isotropy should perform better. A likely explanation is that the off-diagonal elements are assumed to be spatially uniform over a repeating unit. However, the non-zero off-diagonal components should be closely related to the local building geometry, which induces an inhomogeneous response. At 0°,
differs in sign from one lateral boundary of a canyon unit to another (e.g., [
38]); hence,
and
should be defined accordingly. Another contributing factor is sampling: at 45°, the values for the canyon and channel units are not identical, and the differences are comparable to or greater than those for the off-diagonal elements at 0°.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

















