
Analysis of the Influence of Flood on the L4 Combination Observation of GPS and GLONASS Satellites

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Relationship between Multipath Error, Flood, and L4
3. Site, Data, and Rainfall Description
4. Experiment Analysis and Results
4.1. Influence of Flood on L4 for GPS Satellites
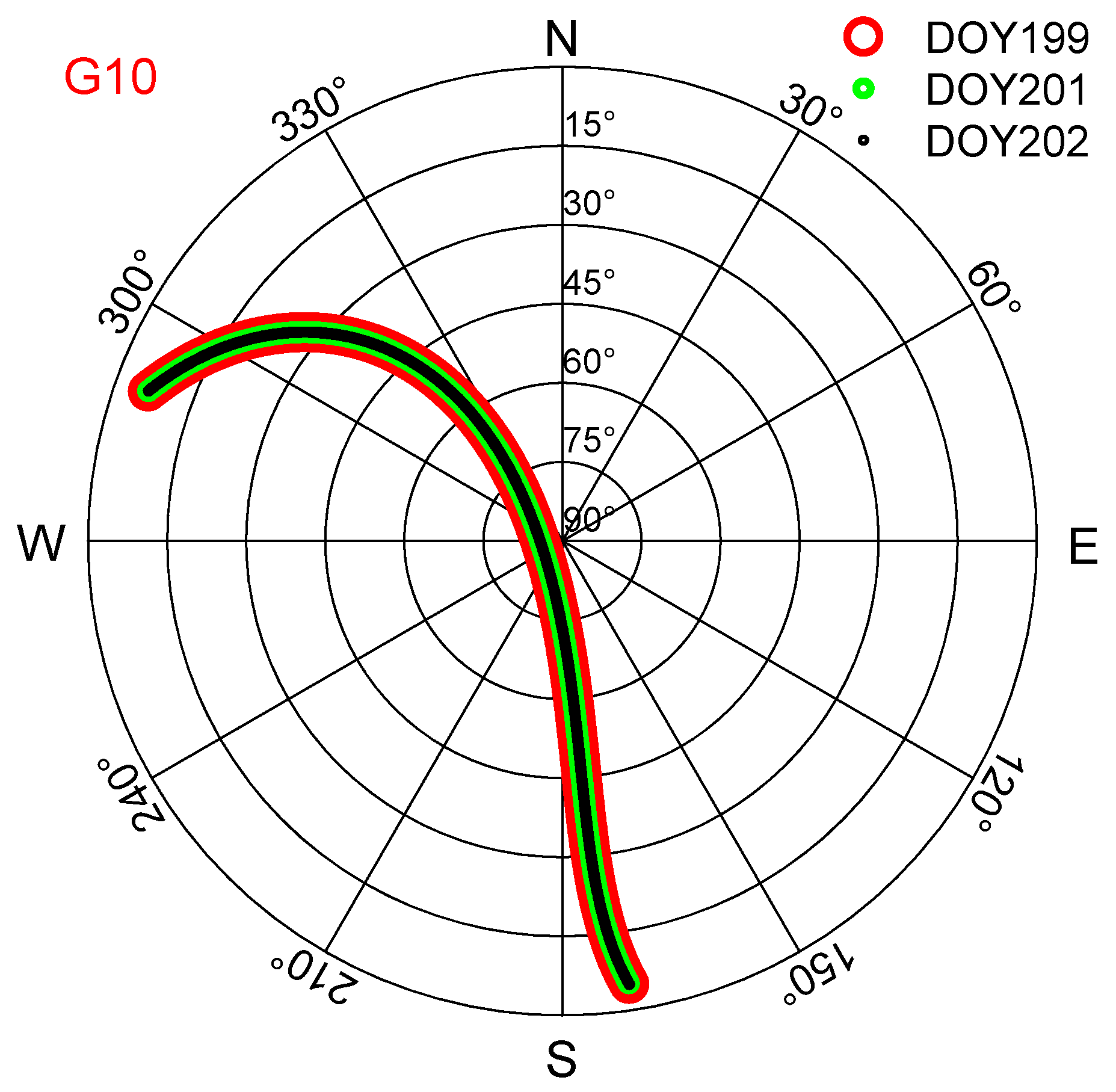
4.1.1. Ground Track Repeat Period of GPS Satellite
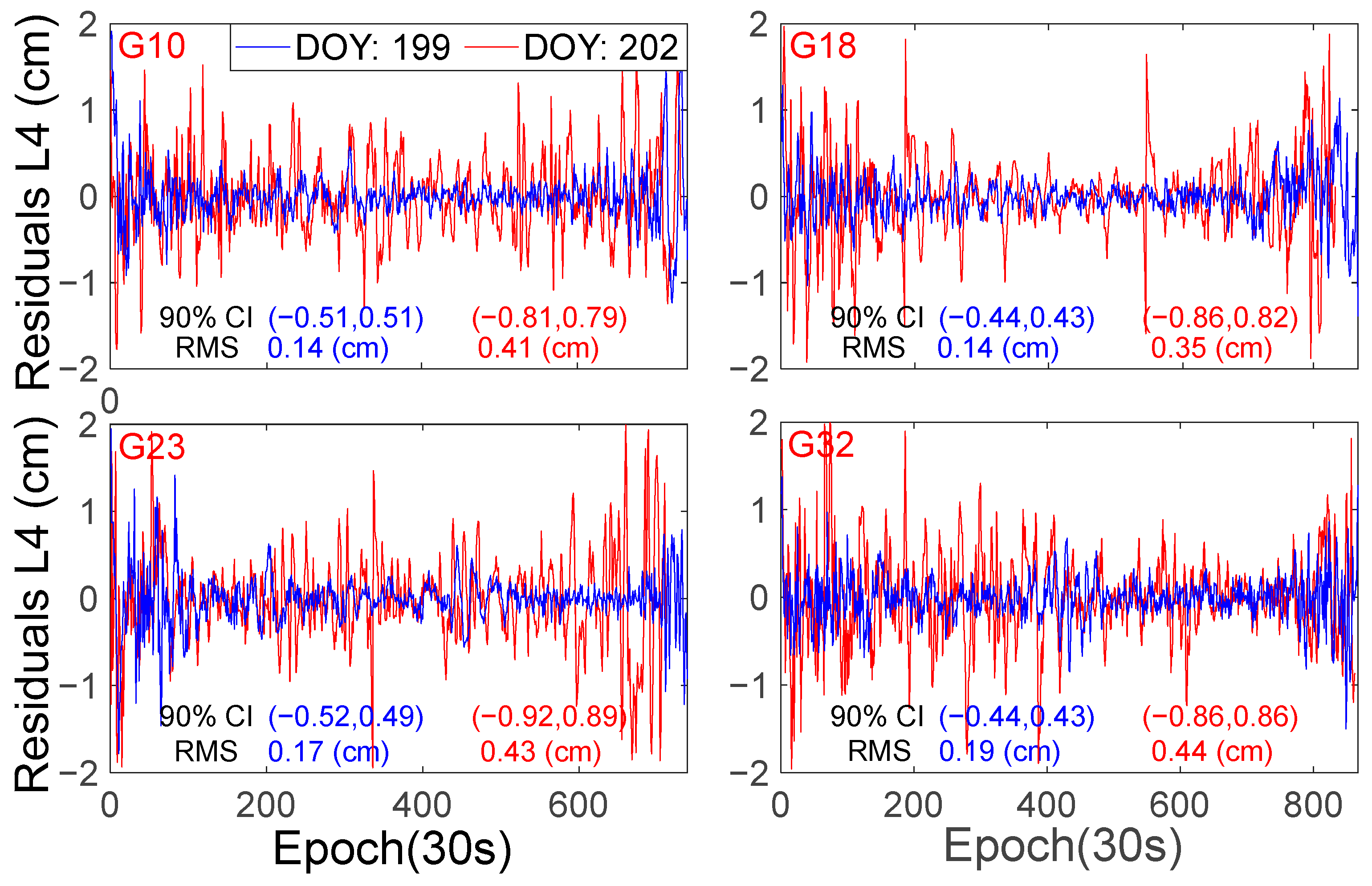
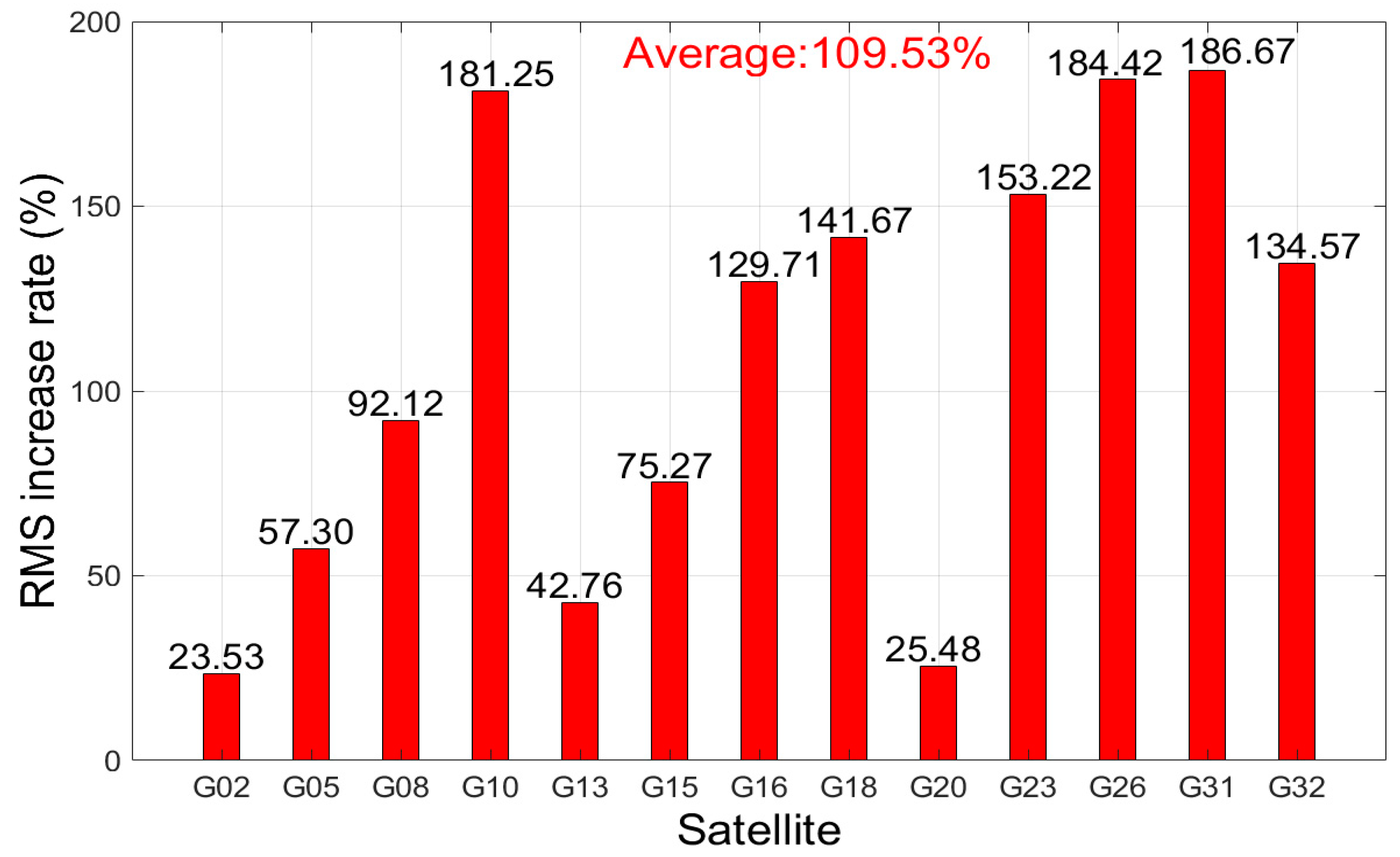
4.1.2. Influence of Flood on GPS L4 Observation
4.1.3. Influence of Rainfall on L4
4.1.4. Influence of Hardware Receiver on L4
4.2. Influence of Flood on L4 for GLONASS Satellites
4.2.1. Ground Track Repeat Period of GLONASS Satellite
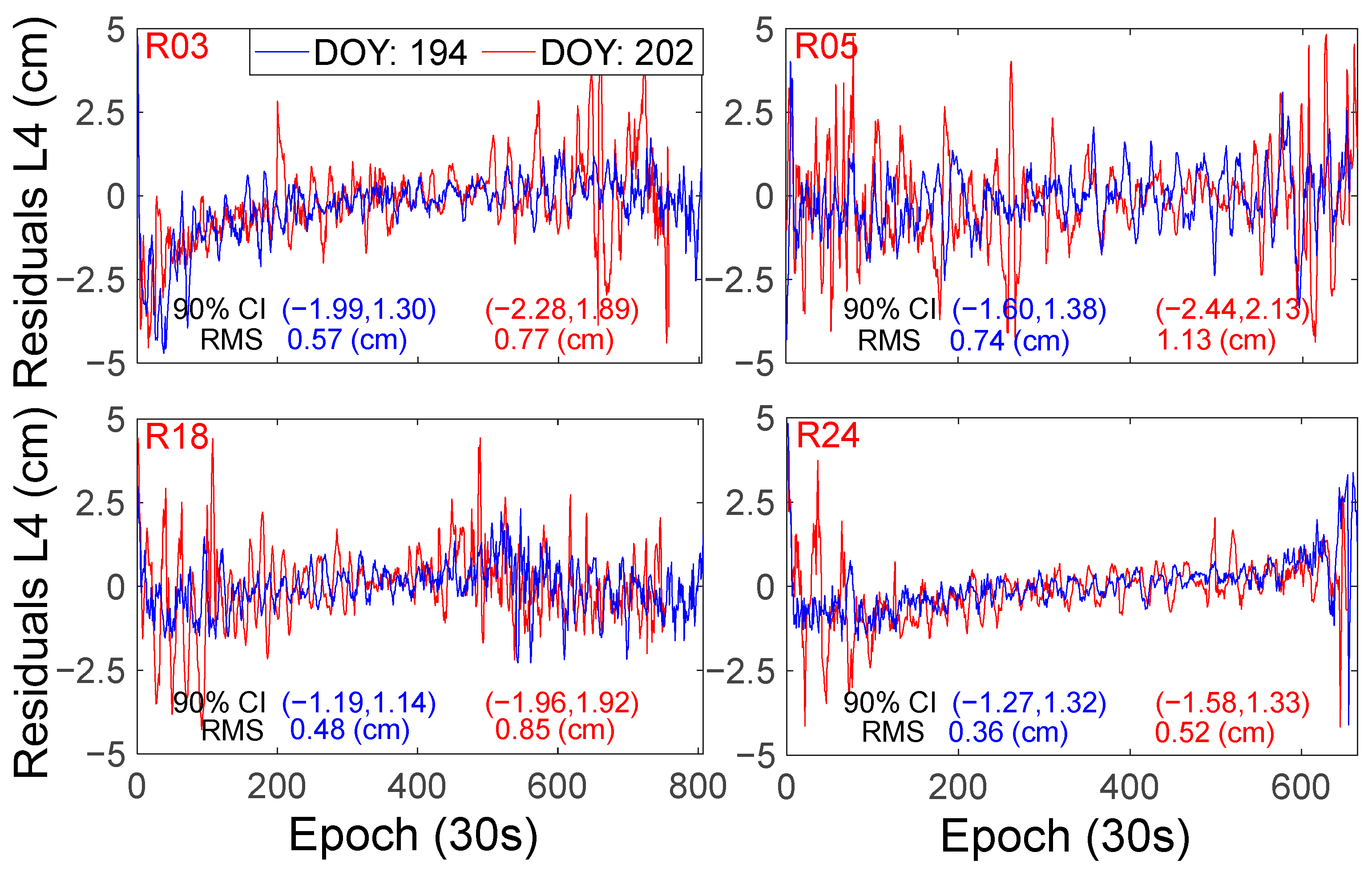
4.2.2. Influence of Flood on GLONASS L4 Combination Observation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Song, D.; Zhang, Q.; Wang, B.; Yin, C.; Xia, J. A Novel Dual-Branch Neural Network Model for Flood Monitoring in South Asia Based on CYGNSS Data. Remote Sens. 2022, 14, 5129. [Google Scholar] [CrossRef]
- Zhang, S.; Ma, Z.; Liu, Q.; Hu, S.; Feng, Y.; Zhao, H.; Guo, Q. POBI interpolation algorithm for CYGNSS near real time flood detection research: A case study of extreme precipitation events in Henan, China in 2021. Adv. Space Res. 2022, 54, 818–829. [Google Scholar] [CrossRef]
- Song, H.; Wu, H.; Huang, J.; Zhong, H.; He, M.; Su, M.; Yu, G.; Wang, M.; Zhang, J. HA-Unet: A Modified Unet Based on Hybrid Attention for Urban Water Extraction in SAR Images. Electronics 2022, 11, 3787. [Google Scholar] [CrossRef]
- Yang, W.; Gao, F.; Xu, T.; Wang, N.; Tu, J.; Jing, L.; Kong, Y. Daily Flood Monitoring Based on Spaceborne GNSS-R Data: A Case Study on Henan, China. Remote Sens. 2021, 13, 4561. [Google Scholar] [CrossRef]
- Zhou, F.; Cao, X.; Ge, Y.; Li, W. Assessment of the positioning performance and tropospheric delay retrieval with precise point positioning using products from different analysis centers. GPS Solut. 2019, 24, 12. [Google Scholar] [CrossRef]
- Ray, J. Mitigation of GPS Code and Carrier Phase Multipath Effects Using a Multi-Antenna System. Ph.D. Thesis, University of Calgary, Calgary, AB, Canada, 2000. [Google Scholar]
- Zheng, K.; Tan, L.; Liu, K.; Li, P.; Chen, M.; Zeng, X. Multipath mitigation for improving GPS narrow-lane uncalibrated phase delay estimation and speeding up PPP ambiguity resolution. Measurement 2022, 206, 112243. [Google Scholar] [CrossRef]
- Su, M.; Yang, Y.; Qiao, L.; Ma, H.; Feng, W.; Qiu, Z.; Zheng, J. Multipath extraction and mitigation for static relative postitioning based on adaptive layer wavelet packets, bootstrapped searches, and CNR constraints. GPS Solut. 2021, 25, 123. [Google Scholar] [CrossRef]
- Cai, C.; Gao, Y.; Pan, L.; Dai, W. An analysis on combined GPS/COMPASS data quality and its effect on single point positioning accuracy under different observing conditions. Adv. Space Res. 2014, 54, 818–829. [Google Scholar] [CrossRef]
- Michael, S. Multipath. In Springer Handbook of Global Navigation Satellite Systems; Teunissen, P., Montenbruck, O., Eds.; Springer: New York, NY, USA, 2017; pp. 444–466. [Google Scholar]
- Su, M.; Chang, X.; Zheng, F.; Shang, J.; Qiao, L.; Teng, X.; Sun, M. Theory and Experiment Analysis on the Influence of Floods on a GNSS Pseudo-Range Multipath and CNR Signal Based on Two Cases Study in China. Remote Sens. 2022, 14, 5874. [Google Scholar] [CrossRef]
- Su, M.; Zheng, J.; Yang, Y.; Wu, Q. A new multipath mitigation method based on adaptive thresholding wavelet denoising and double reference shift strategy. GPS Solut. 2018, 22, 40. [Google Scholar] [CrossRef]
- Su, M.; Yang, Y.; Qiao, L.; Teng, X.; Song, H. Enhanced multipath mitigation method based on multi-resolution CNR model and adaptive statistical test strategy for real-time kinematic PPP. Adv. Space Res. 2020, 67, 868–882. [Google Scholar] [CrossRef]
- Axelrad, P.; Comp, C.; Macdoran, P. SNR based multipath error correction for GPS differential phase. IEEE Trans. Aerosp. Electron. Syst. 1996, 32, 650–660. [Google Scholar] [CrossRef]
- Strode, R.; Groves, P. GNSS multipath detection using three-frequency signal-to-noise measurements. GPS Solut. 2016, 20, 399–412. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, B.; Gao, Y.; Shen, Y. Real-time carrier phase multipath detection based on dual-frequency C/N0 data. GPS Solut. 2019, 23, 7. [Google Scholar] [CrossRef]
- Su, M.; Zheng, F.; Shang, J.; Qiao, L.; Qiu, Z.; Zhang, H.; Zheng, J. Influence of flood on GPS carrier-to-noise ratio and water content variation analysis: A case study in Zhengzhou, China. GPS Solut. 2023, 27, 21. [Google Scholar] [CrossRef]
- Tong, Z.; Su, M.; Zheng, F.; Shang, J.; Wu, J.; Shen, X.; Chang, X. Accurate Retrieval of the Whole Flood Process from Occurrence to Recession Based on GPS Original CNR, Fitted CNR, and Seamless CNR Series. Remote Sens. 2023, 15, 2316. [Google Scholar] [CrossRef]
- Ozeki, M.; Heki, K. GPS snow depth meter with geometry-free linear combinations of carrier phases. J. Geod. 2012, 86, 209–219. [Google Scholar] [CrossRef]
- Heki, K.; Ping, J. Directivity and apparent velocity of the coseismic ionospheric disturbances observed with a dense GPS array. Earth Planet. Sci. Lett. 2005, 236, 845–855. [Google Scholar] [CrossRef]
- Nievinski, F.; Larson, K. An open source GPS multipath simulator in Matlab/Octave. GPS Solut. 2014, 18, 473–481. [Google Scholar] [CrossRef]
- Li, B.; Wang, M.; Wang, Y.; Guo, H. Model assessment of GNSS-based regional TEC modeling: Polynomial, trigonometric series, spherical harmonic and multi-surface function. Acta Geod. Geophys. 2019, 54, 333–357. [Google Scholar] [CrossRef]
- Yu, K.; Ban, W.; Zhang, X.; Yu, X. Snow Depth Estimation Based on Multipath Phase Combination of GPS Triple-Frequency Signals. IEEE Trans. Geosci. Electron. 2015, 53, 5100–5109. [Google Scholar] [CrossRef]
- Qian, X.; Jin, S. Estimation of Snow Depth From GLONASS SNR and Phase-Based Multipath Reflectometry. IEEE J.-STARS. 2016, 9, 4817–4823. [Google Scholar] [CrossRef]
- Zhou, W.; Bian, S.; Liu, Y.; Huang, L.; Liu, L.; Chen, C.; Li, H.; Zhai, G. Coastal High-Temporal Sea-Surface Altimetry Using the Posterior Error Estimations of Ionosphere-Free PPP and Information Fusion for Multi-GNSS Retrievals. Remote Sens. 2022, 14, 5599. [Google Scholar] [CrossRef]
- Bilich, A.; Larson, K. Mapping the GPS multipath environment using the signal-to-noise ratio (SNR). Radio Sci. 2007, 42, 1–16. [Google Scholar] [CrossRef]
- Wang, N.; Xu, T.; Gao, F.; Xu, G. Sea Level Estimation Based on GNSS Dual-Frequency Carrier Phase Linear Combinations and SNR. Remote Sens. 2018, 10, 470. [Google Scholar] [CrossRef]
- Su, M.; Feng, W.; Qiao, L.; Qiu, Z.; Zhang, H.; Zheng, J.; Yang, Y. An improved time-domain multipath mitigation method based on the constraint of satellite elevation for low-cost single frequency receiver. Adv. Space Res. 2022, 69, 3597–3608. [Google Scholar] [CrossRef]
- Yang, Y.; Jiang, J.; Su, M. Comparison of Satellite Repeat Shift Time for GPS, BDS, and Galileo Navigation Systems by Three Methods. Algorithms 2019, 12, 233. [Google Scholar] [CrossRef]













Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, J.; Su, M.; Gong, J.; Pan, L.; Long, J.; Zheng, F. Analysis of the Influence of Flood on the L4 Combination Observation of GPS and GLONASS Satellites. Atmosphere 2023, 14, 934. https://doi.org/10.3390/atmos14060934
Wu J, Su M, Gong J, Pan L, Long J, Zheng F. Analysis of the Influence of Flood on the L4 Combination Observation of GPS and GLONASS Satellites. Atmosphere. 2023; 14(6):934. https://doi.org/10.3390/atmos14060934
Chicago/Turabian StyleWu, Juntao, Mingkun Su, Jun Gong, Lingsa Pan, Jiale Long, and Fu Zheng. 2023. "Analysis of the Influence of Flood on the L4 Combination Observation of GPS and GLONASS Satellites" Atmosphere 14, no. 6: 934. https://doi.org/10.3390/atmos14060934