
Lightning Identification Method Based on Deep Learning
 ,
,  , and
, and
Abstract
:1. Introduction
2. Methods: Data Sources and Preprocessing
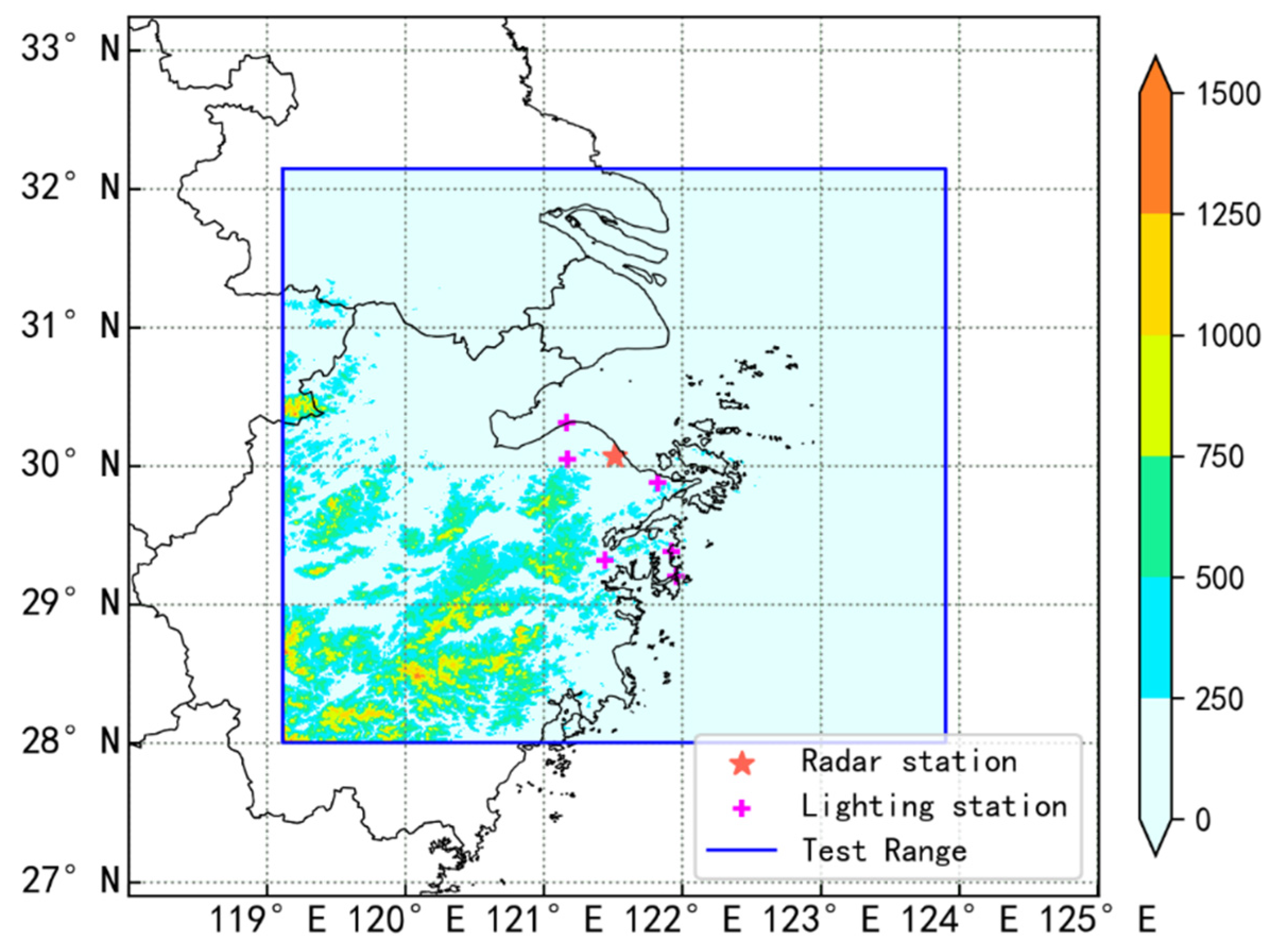
2.1. Data Sources
2.2. Data Preprocessing
3. Deep Learning (DL) Network
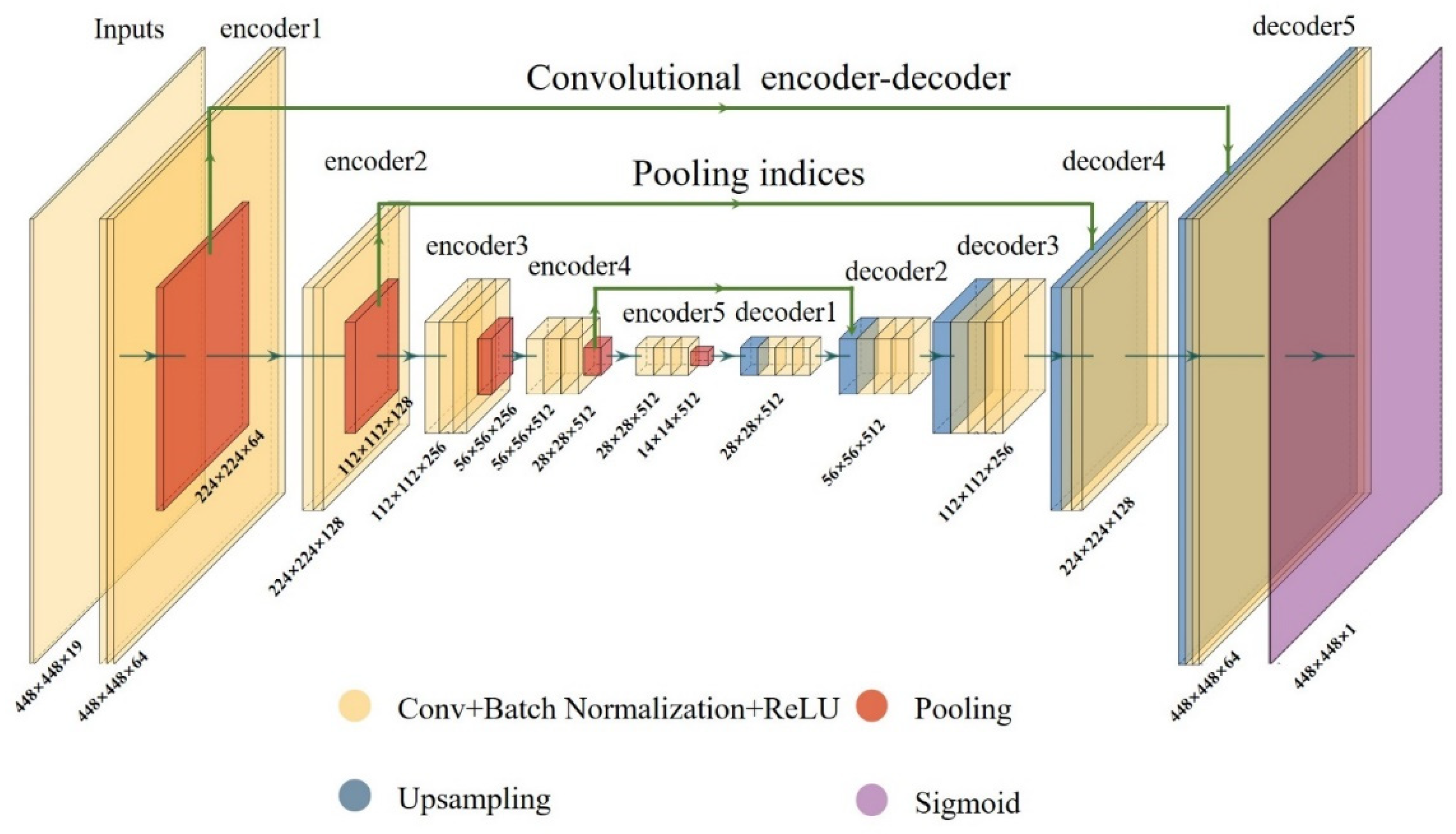
3.1. Network Structure
3.2. Loss Function Improvement
4. Model Training
4.1. Hyperparameter Setting
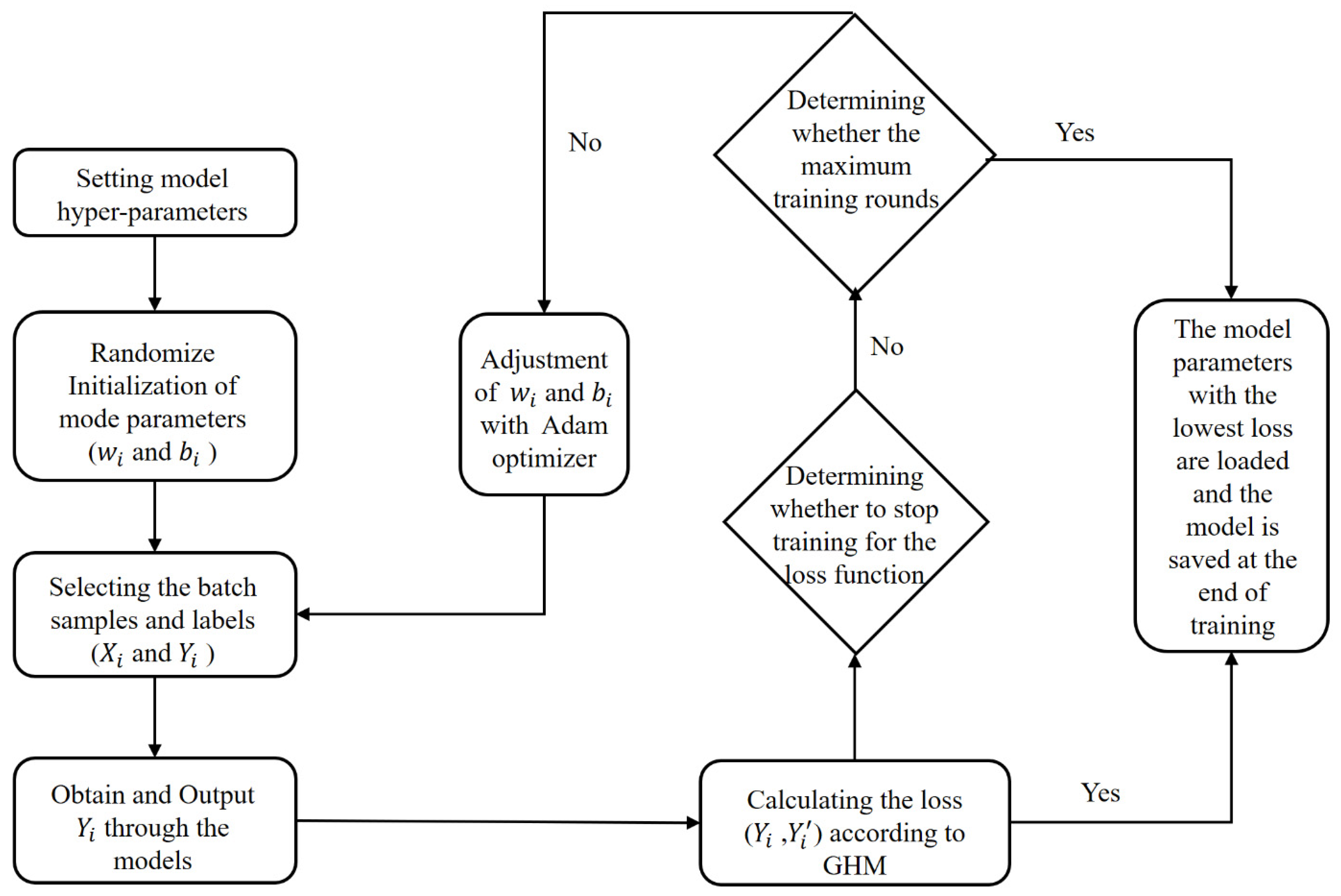
4.2. Model Tuning
5. Experimental Results and Analysis
5.1. Evaluation Metrics
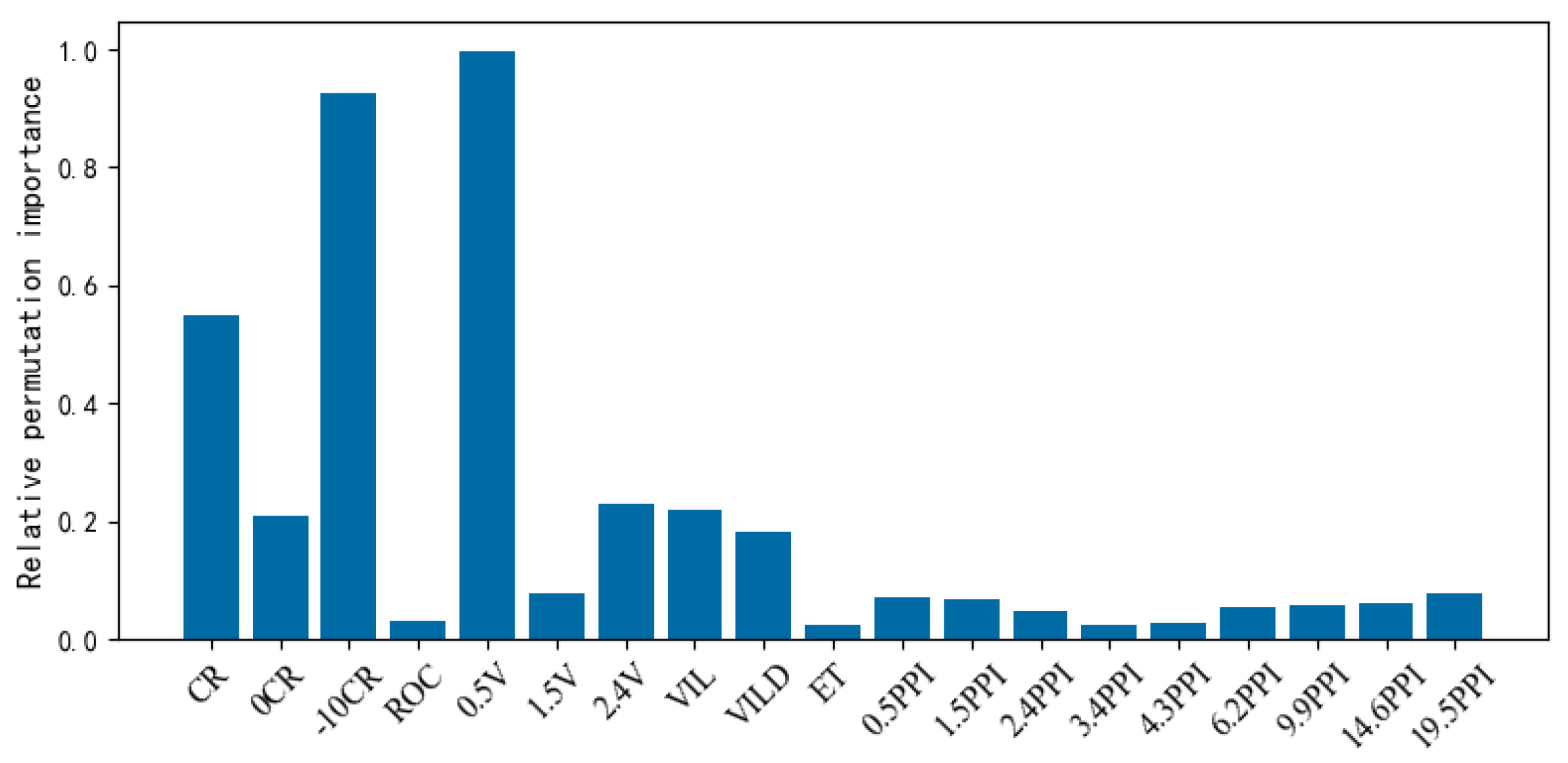
5.2. Importance of the Characteristic Factors
5.3. Comparison between Algorithms
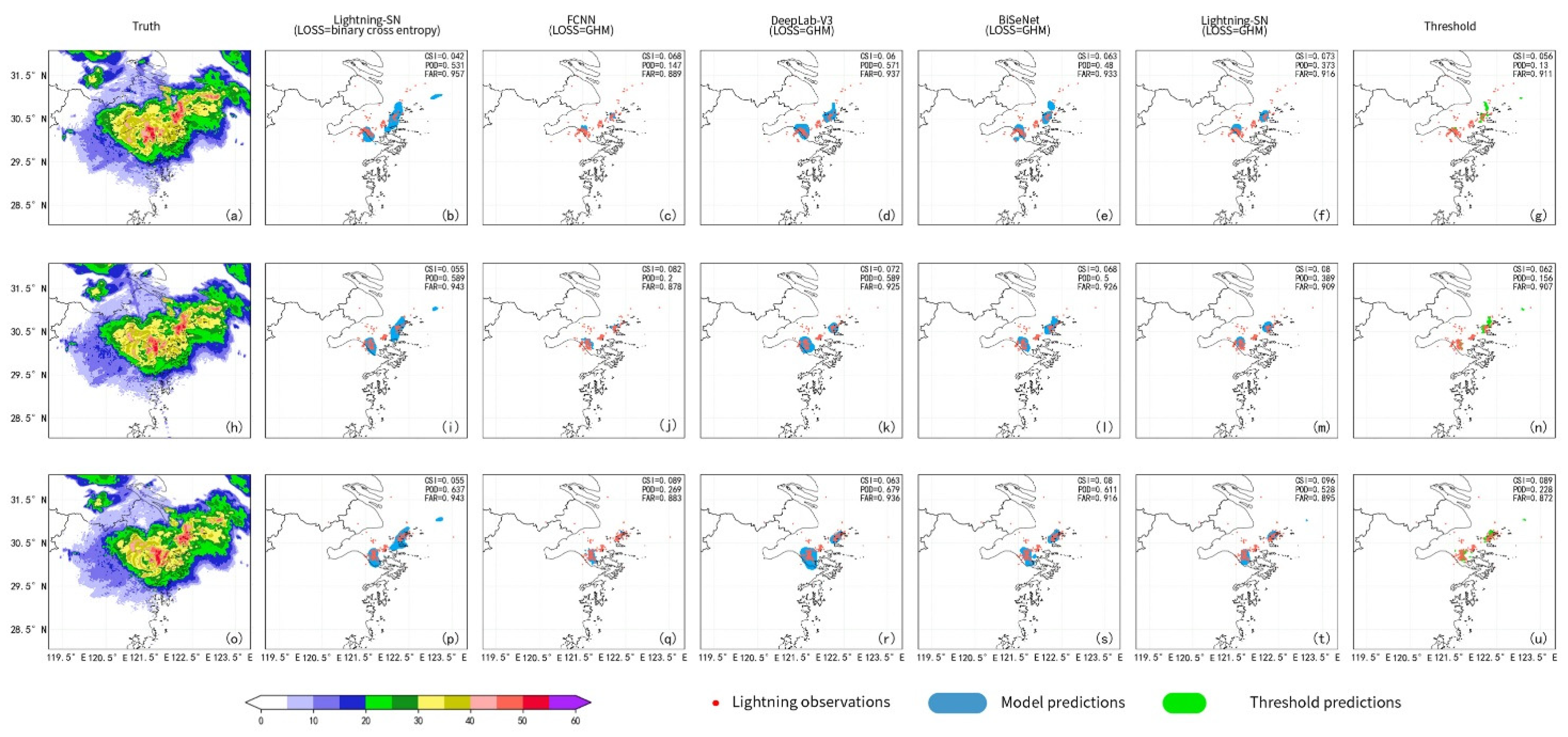
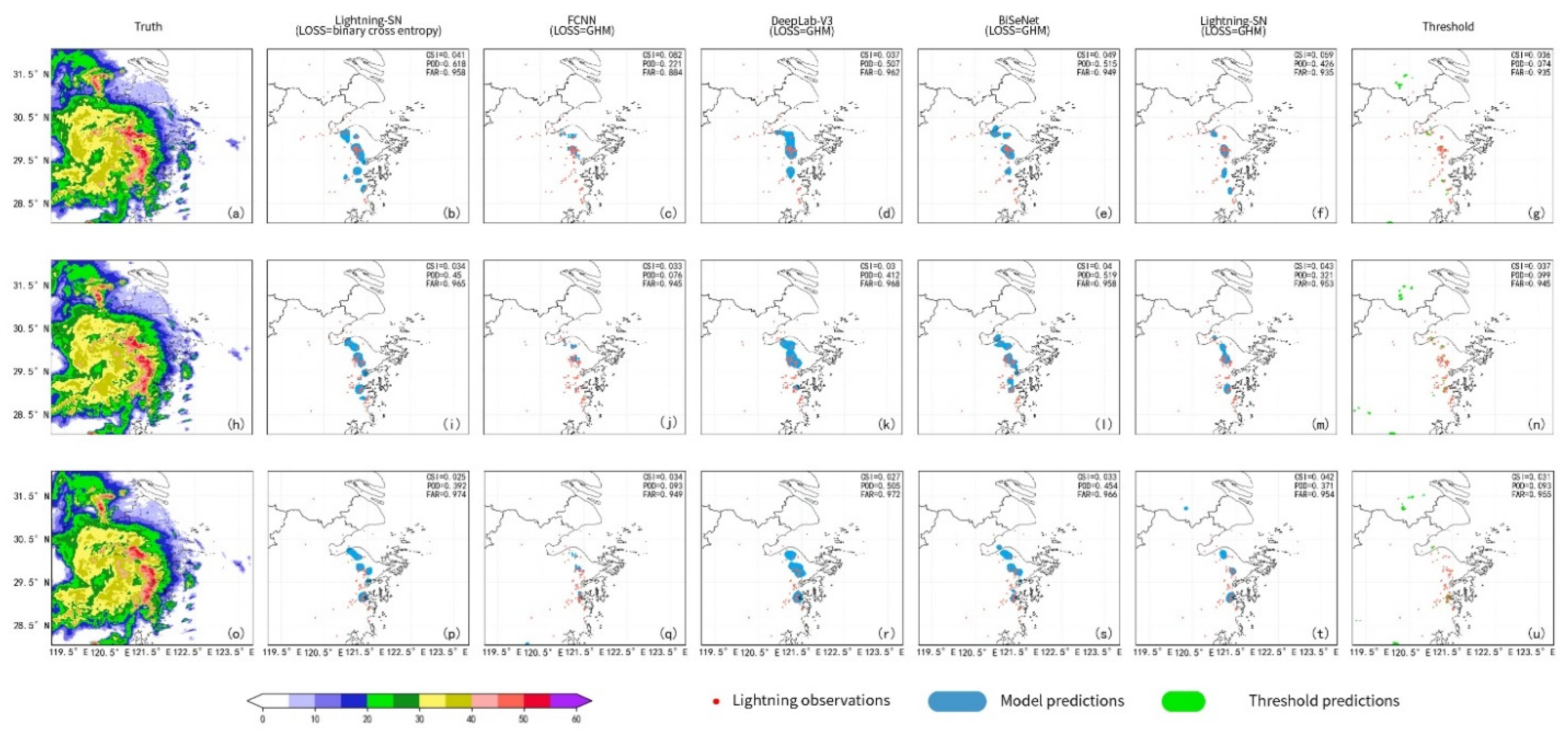
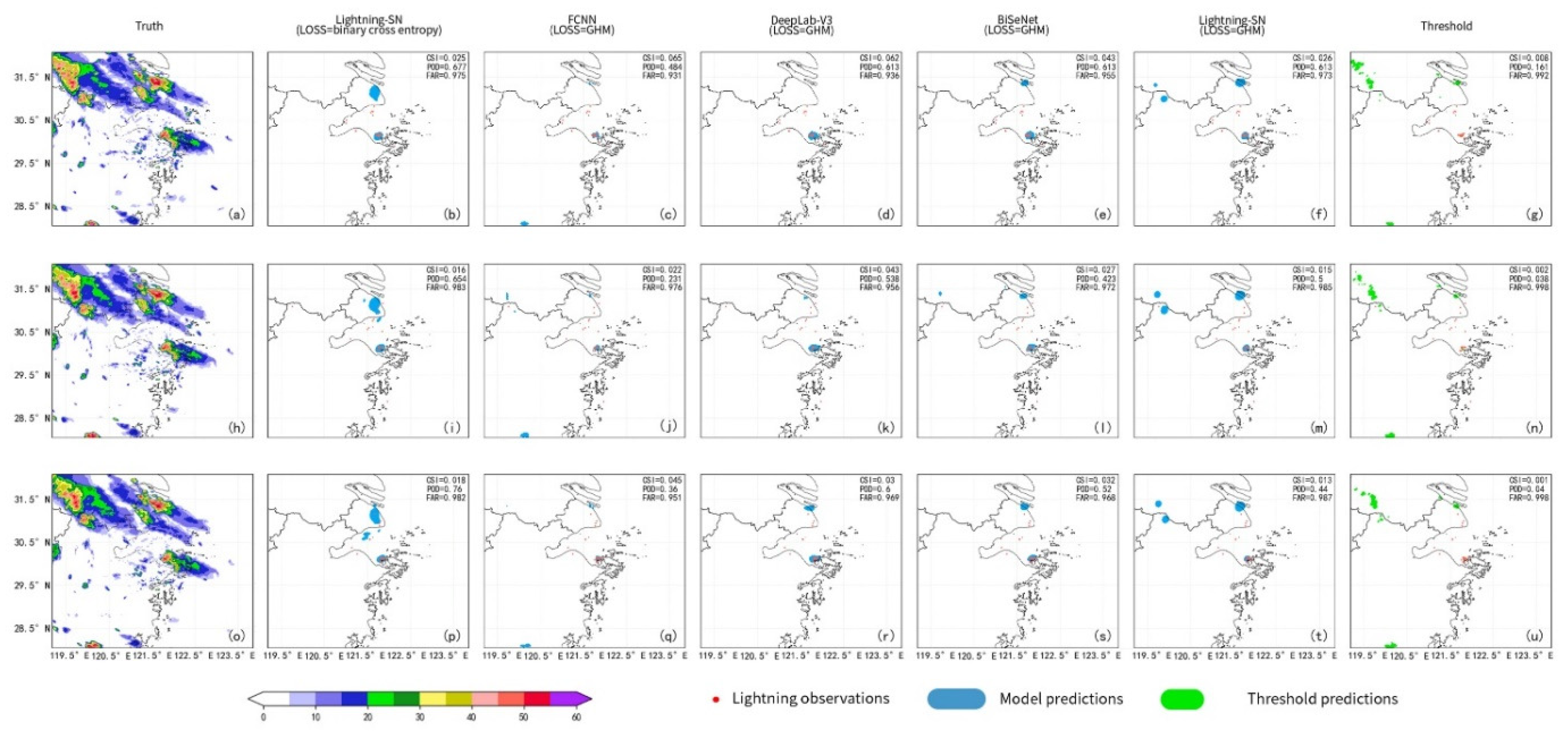
5.4. Case Test Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Glossary
| Pooling | The pooling operation is also called undersampling or downsampling. It is mainly applied to feature downsampling and to compress the data and number of parameters. |
| Convolution | The convolution operation is used to extract the features of the original data using the parameters of the convolution kernel. Each convolution kernel represents one feature. |
| Semantic segmentation | An image is composed of numerous pixels. The semantic segmentation is the segmentation of pixels according to the different semantic meanings expressed in the image. |
| Encoder–decoder structure | The encoder is an unsupervised neural network model. It learns the implicit features of the input data. The decoder is also a neural network model. It reconstructs the original input data with new features learned by the encoder. The encoder-decoder structure is a general model framework in deep learning. |
| Batch normalization | To achieve the objective of homogeneous data distribution, the distribution of the input values of each neuron in each layer of the neural network is forced back to a standard normal distribution with mean 0 and variance 1 by some normalization means. |
| ReLU | The Rectified Linear Unit is a common activation function used in artificial neural networks. Compared with other activation functions, it can achieve more efficient gradient descent and back propagation. |
| Dilated convolution | The dilated convolution is designed to expand the reception field by injecting holes into the standard convolution map. The size of the reception field symbolizes the network’s learning of global features. |
| ASPP | The atrous spatial pyramid pooling is a module using multiple parallel cavity convolution layers with different sampling frequencies. The purpose is to increase the reception field and enhance the ability of the network to obtain multi-scale contextual information without degrading the sampling accuracy. |
| Context path | BiSegNet is a specially defined module in the network. This module improves the reception field and semantic level with a series of convolutions to obtain a large range of contextual information. |
| SHY95 | SHY95 is a classification method for precipitation clouds |
References
- Xiao, Y.; Xiao, Z.; Xiu, W. The advances in the nowcasting techniques on thunderstorms and severe convection. Acta Meteorol. Sin. 2012, 70, 311–337. [Google Scholar]
- Jia, L.; Zhi, W.; Yan, R.; Guang, L.; Ya, H. Analysis of thunderstorm days based on lightning location system and manual observation. Meteorol. Sci. Technol. 2012, 40, 132–136. [Google Scholar]
- Li, J.; Shen, S.; Liao, R.; Li, B. Analysis of the lightning current amplitude change characteristics in Chongqing area. High Volt. Eng. 2010, 36, 2918–2923. [Google Scholar]
- Li, J.; Guo, X.; Xiao, W. Relationship of Cloud-Ground lightning activities with radar echo and precipitation in storms of Beijing. J. Nanjing Inst. Meteorol. 2006, 29, 228–234. [Google Scholar]
- Shi, X. Comparative analysis on detection efficiency of two ADTD lightning location systems. Meteorol. Hydrol. Mar. Instrum. 2016, 33, 6–12. [Google Scholar]
- Zhao, W.; Lu, T.; Zhang, Y.; Li, Y.; Zhou, X. Method for lightning warning based on multisource observations. Meteorol. Sci. Technol. 2020, 48, 438–442. [Google Scholar]
- Zhou, Z.; Min, J.; Peng, X. Extended-VAP method for retrieving wind field from single-doppler radar. (I): Methods and contrast experiment. Plateau Meteorol. 2006, 25, 516–524. [Google Scholar]
- Peng, L.; Wan, Q.-L.; Wang, Q.; Yi, Y. The study of the relation between lightning flash and CINRAD Doppler radar’s echo in the central Area of Guangdong. J. Trop. Meteorol. 2007, 23, 171–176. [Google Scholar]
- Shi, Y.; Zhang, Y.; Zheng, D.; Meng, Q.; Yao, W.; Liu, H. The relationship between lightning activity and radar echo characteristics of thunderstorm in Beijing area. Meteorol. Mon. 2012, 38, 66–71. [Google Scholar]
- Xiao, Y.; Xiu, Y.; Ting, X. Principles and Applications of Doppler Weather Radar; China Meteorological Press: Beijing, China, 2006. [Google Scholar]
- Li, F.; Huang, X.; Wang, Z.; Feng, X.; Jiao, X. A preliminary study on lightning identification criteria based on radar data in Nanjing. Sci. Meteorol. Sin. 2010, 30, 202–207. [Google Scholar]
- Vincent, B.R.; Carey, L.D.; Schneider, D.; Keeter, K.; Gonski, R. Using WSR-88d reflectivity for the prediction of cloud to ground lightning: A central North Carolina study. Natl. Weather Dig. 2003, 27, 35–44. [Google Scholar]
- Yang, Y.; Helen, P. Investigating the potential of using radar echo reflectivity to nowcast Cloud-to-Ground lightning initiation over southern Ontario. Weather. Forecast. 2010, 25, 1235–1248. [Google Scholar] [CrossRef]
- Huang, X.; Ma, Y.; Hu, S. Extrapolation and effect analysis of weather radar echo sequence based on deep learning. Acta Meteorol. Sin. 2021, 79, 817–827. [Google Scholar]
- Wu, L.; Feng, G.; Yang, Z.; Huang, L.; Cheng, B. Application study of radar data in lightning warning. J. Chendu Univ. Info. Technol. 2010, 25, 524–530. [Google Scholar]
- Arel, I.; Rose, D.; Karnowski, T.P. Deep machine learning—A new frontier in artificial intelligence research [Research Frontier]. IEEE Comput. Intell. Mag. 2010, 5, 13–18. [Google Scholar] [CrossRef]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 39, 640–651. [Google Scholar]
- Zhang, X.; Yao, Q.; Zhao, J.; Jin, Z.; Feng, Y. Image semantic segmentation based on a fully convolutional neural network. Comput. Eng. Appl. 2022, 1–16. Available online: http://kns.cnki.net/kcms/detail/11.2127.TP.20211220.0930.002.html (accessed on 15 December 2022).
- Liu, S.; Yi, L.; Zhang, S.; Shi, X.; Xue, Y. A study of daytime sea fog retrieval over the Yellow Sea based on fully convolutional networks. Trans. Oceanol. Limnol. 2019, 6, 13–22. [Google Scholar]
- Zhan, Y.J.; Wang, J.; Shi, J.P.; Cheng, G.; Yao, L.; Sun, W. Distinguishing cloud and snow in satellite images via deep convolutional network. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1785–1789. [Google Scholar] [CrossRef]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. SegNet: A deep convolutional encoder-decoder architecture for scene segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 2481–2495. [Google Scholar] [CrossRef]
- Li, J.; Zhao, P.; Fang, W.; Song, S. Cloud detection of multi-angle remote sensing image based on deep learning. J. Atmos. Environ. Opt. 2020, 15, 13. [Google Scholar]
- Zhou, K.; Zheng, Y.; Dong, W.; Wang, T. A deep learning network for cloud-to-ground lightning nowcasting with multisource data. J. Atmos. Ocean. Technol. 2020, 37, 927–942. [Google Scholar] [CrossRef] [Green Version]
- Friedman, J.H. On bias, variance, 0/1—Loss, and the curse-of-dimensionality. Data Min. Knowl. Discov. 1997, 1, 55–77. [Google Scholar] [CrossRef]
- Berisha, V.; Krantsevich, C.; Hahn, S.; Dasarathy, G.; Turaga, P.; Liss, J. Digital medicine and the curse of dimensionality. NPJ Digit. Med. 2021, 4, 153. [Google Scholar] [CrossRef]
- Li, K.; Wei, M.; Yao, Y. Analysis and mechanism study on the correlation between lightning and radar data in severe weather. J. Trop. Meteorol. 2006, 22, 265–272. [Google Scholar]
- Jing, S. The cloud-to-ground lightning related to the reflectivity parameters: Case study. Atmos. Sci. 2002, 1, 21–33. [Google Scholar]
- Chang, Y.; Chen, D.; Guo, Z. Research on the relationship of doppler radar and the lightning warning. Meteorol. Environ. Sci. 2010, 33, 36–39. [Google Scholar]
- Liu, W.; Gou, S.; Fu, Z. Application of radar data in lightning warning over the Northeast of Tibetan Plateau. Meteorol. Mon. 2015, 41, 1253–1259. [Google Scholar]
- Steiner, M.; Houze, R.A., Jr.; Yuter, S.E. Climatological characterization of three-dimensional storm structure from operational radar and rain gauge data. J. Appl. Meteorol. 1995, 34, 1978–2007. [Google Scholar] [CrossRef]
- Biggerstaff, M.J.; Listemaa, S.A. An improved scheme for convective/stratiform echo classification using radar reflectivity. J. App. Meteorol. 2000, 39, 2129–2150. [Google Scholar] [CrossRef]
- Cheng, H.; Wang, Y.; Liu, J.; Liu, B. Lightning location data controlling based on normal distribution fitting and testing. J. Meteorol. Sci. 2015, 35, 195–198. [Google Scholar]
- Whitehead, J.T.; Chisholm, W.A.; Anderson, J.G.; Clayton, R.; Elahi, H.; Eriksson, A.J.; Grzybowski, S.; Hileman, A.R.; Janischewskyj, W.; Longo, V.J.; et al. IEEE working report: Estimating lightning performance of transmission lines 2 updates to analytical models. IEEE Trans. Power Deliv. 1993, 8, 1254–1267. [Google Scholar]
- Xiecheng, W.; Yao, T.; Ming, X.; Yanqing, L.; Fengjiao, L.; Defeng, X. Research on error analysis and screening method of lightning drop point based on location method. J. Catastrophol. 2021, 36, 41–46. [Google Scholar]
- Wang, X.; Qing, J.; Yu, R. T/CMSA0012—2019 Technical Requirements for Lightning Monitoring and Early Warning in Explosion and Fire Hazard Sites; China Meteorological Service Association: Beijing, China, 2019. [Google Scholar]
- Li, B.; Liu, Y.; Wang, X. Gradient harmonized single-stage detector. In Proceedings of the AAAI Conference on Artificial Intelligence, Honolulu, HI, USA, 27 January–1 February 2019. [Google Scholar]
- McClelland, J.L.; Rumelhart, D.E. Parallel Distributed Processing: Explorations in the Microstructure of Cognition: Foundations; MIT Press: Cambridge, MA, USA, 1986. [Google Scholar]
- Kingma, D.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Geng, Y.A.; Li, Q.; Lin, T.; Jiang, L.; Liangtao, X.; Zheng, D.; Yao, W.; Lyu, W.; Zhang, Y. LightNet: A dual spatiotemporal encoder network model for lightning prediction. In Proceedings of the 25th ACM SIGKDD International Conference, Anchorage, AK, USA, 4–8 August 2019; ACM: New York, NY, USA, 2019. [Google Scholar]
- Lin, T.; Li, Q.; Geng, Y.; Jiang, L.; Xu, L.; Zheng, D.; Yao, W.; Lyu, W.; Zhang, Y. Attention–based dual–source spatiotemporal. neural network for lightning forecast. IEEE Access 2019, 7, 158296–158307. [Google Scholar] [CrossRef]
- Brodehl, S.; Müller, R.; Schömer, E.; Spichtinger, P.; Wand, M. End–to–End prediction of lightning. events from geostationary satellite images. Remote Sens. 2022, 14, 3760. [Google Scholar] [CrossRef]
- Geng, Y.; Li, Q.; Lin, T.; Yao, W.; Xu, L.; Zheng, D.; Zhou, X.; Zheng, L.; Lyu, W.; Zhang, Y. A deep learning framework for lightning forecasting. With multi-source spatiotemporal data. Q. J. R. Meterorol. Soc. 2021, 147, 4048–4062. [Google Scholar] [CrossRef]
- Lu, M.; Zhang, Y.; Ma, Z.; Yu, M.; Chen, M.; Zheng, J.; Wang, M. Lightning strike location identification based on. 3D weather radar data. Front. Environ. Sci. 2021, 9, 714067. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Data | Physical Meaning | No. | Data | Physical Meaning |
|---|---|---|---|---|---|
| 1 | CR | Composite reflectivity | 11 | 0.5 PPI | Echo information at E 0.5° |
| 2 | 0 CR | Composite reflectivity of 0 °C altitude | 12 | 1.5 PPI | Echo information at E 1.5° |
| 3 | −10 CR | Composite reflectivity −10 °C altitude | 13 | 2.4 PPI | Echo information at E 2.4° |
| 4 | ROC | Stratus clouds, warm clouds, and convective clouds | 14 | 3.4 PPI | Echo information at E 3.4° |
| 5 | 0.5 V | Radial velocity at a 0.5° elevation angle | 15 | 4.3 PPI | Echo information at E 4.3° |
| 6 | 1.5 V | Radial velocity at a 1.5° elevation angle | 16 | 6.2 PPI | Echo information at E 6.2° |
| 7 | 2.4 V | Radial velocity at a 2.4° elevation angle | 17 | 9.9 PPI | Echo information at E 9.9° |
| 8 | VIL | Vertically integrated liquid | 18 | 14.6 PPI | Echo information at E 14.6° |
| 9 | VILD | Vertically integrated liquid density | 19 | 19.5 PPI | Echo information at E 19.5° |
| 10 | ET | Echo-top height |
| Hyperparameter | Setting |
|---|---|
| Training sample size | 448 × 448 × 19 |
| Batch size | 8 |
| Iteration times | 30 |
| Learning rate | 10−3 |
| Optimizer | Adam optimizer |
| Loss function | GHM (bin = 10) |
| Padding | The resolution of the input and output feature maps remain constant, with no padding. |
| Identification | |||
|---|---|---|---|
| Presence | Absence | ||
| Observation | Presence | TP | FN |
| Absence | FP | TN | |
| Algorithm | LOSS | CSI | POD | FAR | F1-Score |
|---|---|---|---|---|---|
| FCNN | GHM | 0.0251 | 0.07705 | 0.96411 | 0.04897 |
| DeepLab–V3 | GHM | 0.02687 | 0.0822 | 0.96162 | 0.05233 |
| BiSeNet | GHM | 0.02772 | 0.08588 | 0.96068 | 0.05394 |
| Threshold | / | 0.01688 | 0.0191 | 0.9809 | 0.0332 |
| Lightning-SN | Binary cross-entropy | 0.02239 | 0.03555 | 0.94294 | 0.04381 |
| Lightning-SN | GHM | 0.04145 | 0.09165 | 0.92965 | 0.0796 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qian, Z.; Wang, D.; Shi, X.; Yao, J.; Hu, L.; Yang, H.; Ni, Y. Lightning Identification Method Based on Deep Learning. Atmosphere 2022, 13, 2112. https://doi.org/10.3390/atmos13122112
Qian Z, Wang D, Shi X, Yao J, Hu L, Yang H, Ni Y. Lightning Identification Method Based on Deep Learning. Atmosphere. 2022; 13(12):2112. https://doi.org/10.3390/atmos13122112
Chicago/Turabian StyleQian, Zheng, Dongdong Wang, Xiangbo Shi, Jinliang Yao, Lijun Hu, Hao Yang, and Yongsen Ni. 2022. "Lightning Identification Method Based on Deep Learning" Atmosphere 13, no. 12: 2112. https://doi.org/10.3390/atmos13122112