1. Introduction
Over the past decade, there has been a collective awareness that NO
2, SO
2, CO, and PM
2.5 (atmospheric particle matter with an aerodynamic diameter of ≤ 2.5 μm), as the major substances causing air pollution, have an important effect on climate and human health [
1,
2,
3,
4,
5,
6,
7,
8,
9]. Therefore, China developed a set of National Ambient Air Quality Standards for mitigating air pollution and improving air quality. These emissions reduction policies have had an effective influence on the air quality, significantly reducing the primary air pollutants. In particular, achievements made with respect to air quality improvements in China’s coastal city, Guangzhou, have been good; the daily air quality was up to the secondary standards in 2020 (
http://sthjj.gz.gov.cn/zwgk/hjgb/, accessed on: 10/5/2022). A suitable pollutant model can provide optimal simulations of the temporal variations of regional pollutant concentrations; meanwhile, it can help target pollution control and sustain improvements to air quality. Therefore, accurate pollutant models play a crucial role in air pollution control. Previous studies had largely focused on the methods and the use of models for pollutant simulations. However, till now, few studies have been conducted to evaluate different model performances in simulating pollutant concentrations. Thus, it is strongly desired to select the most suitable model for air pollutant studies.
Many operational chemical transport models (CTMs) have been developed for the needs of predicting spatial and temporal air pollutants distributions and providing scientific references for air pollution control and management. The Weather Research and Forecasting model with Chemistry (WRF-Chem), as a typical traditional and continuously updated CTM, has been widely used to handle air pollution problems in different ways [
10,
11,
12,
13,
14,
15]. Grell et al. (2005) proposed WRF-Chem, a WRF model fully coupled online with some chemical mechanisms [
16], in which the meteorological and air pollution components use identical time steps, grid resolutions, and transport schemes for all domains. It utilizes state-of-the-art chemical mechanisms and aerosol modules. The WRF-Chem simulations were statistically evaluated based on ground-based observations, firstly, by further comparisons with Mesoscale Model 5-chemistry (MM5-chem) simulations. They reported that the WRF-Chem model performed better in simulating O
3 and O
3 precursor gas concentrations than the MM5-chem model, but was poorer at simulating other gas-phase species concentrations, due to the use of different planetary boundary layer (PBL) physics parameterization mechanisms. These differences between the two models caused larger biases in the WRF-Chem simulations. However, Grell et al. (2005) did not simulate aerosol concentrations, nor did they evaluate the performance in aerosol simulations [
16].
Rocio et al. (2015) assessed the sensitivities of different microphysics schemes used in the WRF-Chem model to simulate aerosol distribution and aerosol–radiation feedback influence [
17]. Except for the Morrison and Lin microphysical schemes, two WRF-Chem simulations using the same parameterizations were compared, covering two seasons in 2010. Their comparison results indicated that there were no distinct improvements across the simulations on a large scale using the two selected different microphysical schemes. However, the simulations had different aerosol spatial distributions and statistical pollutant results. Subsequently, Mohan et al. (2018) compared the WRF-Chem simulation performance of different PBL schemes, including the YSU and ACM2 schemes. With observations from four monitoring sites in Delhi, simultaneous comparisons with the two WRF-Chem simulations were conducted to evaluate the model performance for the meteorological elements and pollutant concentrations [
18]. Mohan et al. (2018) concluded that the pollutant simulation performance partially depended on the meteorological element conditions. In other words, the PM
10 and O
3 simulations were good when the wind speed values were smaller than 8 m/s and temperature values were below 40 °C. Furthermore, the ACM2 scheme was found to be the best PBL scheme in Delhi, which improved the WRF-Chem simulation performance for the meteorological and air pollutant variables.
Zhou et al. (2017) applied WRF-Chem to predict PM
2.5 concentration over eastern China and showed that it had good correlation with ground measurements and simulation performance [
19]. Sha et al. (2019) successfully reproduced four localized haze episodes in Nanjing during two seasons; however, the model performance was poor at the SO
2 concentration simulations [
20]. To the best of our knowledge, limited studies have utilized high-resolution horizontal grids and emissions inventories to simulate pollutant concentrations. Furthermore, there is a lack of simulations on minimal pollutant concentrations for recent years in Guangzhou. Most previous studies have solely used the WRF-Chem model and evaluated the simulation accuracy and performance against ground observations. Some studies have compared the simulated accuracy of different air quality models [
21,
22,
23,
24]. Zhang et al. (2016) compared WRF-Chem with the Community Multiscale Air Quality (CMAQ) model for meteorological and pollutant simulation performance over East Asia [
25]. They showed that CMAQ yielded better simulations than those of the WRF-Chem model for meteorological elements. However, they did not meticulously consider the specific pollutant simulation differences between these models.
An increasing number of studies have used different neural network (NN) models to simulate pollutant concentrations, with evaluations on the precision and performance of those models [
26,
27,
28,
29,
30]. Ni et al. (2018) used the meteorological and satellite-derived aerosol optical depth (AOD) to simulate the PM
2.5 concentrations. They simulated PM
2.5 variability and diurnal variations in the Beijing–Tianjin–Hebei (BTH) region using the BPNN model, finding that the BPNN simulations showed a similar yearly variation in comparison with ground observations [
31]. The results showed that the PM
2.5 concentrations estimated from the BPNN model have good correlations with the observed PM
2.5 concentrations (R
2 = 0.68). Meanwhile, although they found that the 10-fold cross-validation method overestimates the concentrations, the simulated result closely estimated the observed concentrations (R
2 = 0.54). The BPNN model was nevertheless not compared with other NN models in their study.
Li et al. (2017) proposed a long short-term memory neural network extended model (LSTME) to simulate the pollutant concentrations [
32]. They extracted the features from the historical pollutant concentrations and meteorological elements for predicting the future pollutant concentrations. The prediction results of the LSTME model were verified by the observed concentrations; meanwhile, they found that the LSTME model performed well, with a root mean square error (RMSE) of 41.94% and a mean absolute percentage error (MAPE) of 31.47%. In addition, the LSTME model was compared with several other NN models, as indicated by the spatiotemporal deep learning model, the time delay NN model, the support vector regression model, etc. The study showed that the LSTME model performance was superior to the other NN models’ performances based on criteria such as RMSE, MAPE, and mean absolute error (MAE). However, they did not evaluate the trend of simulating temporal variations and the correlation coefficient with the observed data.
All things considered, these studies focused on the single model simulation performance, or the comparisons between different CTMs or NN models. Recent comprehensive evaluations of the accuracy and performance of air pollutant simulations between CTM and NN models, as well as discussions on their discrepancies over Guangzhou, remain scarce.
The CTMs simply and reasonably expressed the atmospheric movement and the reaction of air pollutants by the parameterization schemes, so they can explain the causes of simulation errors by the physical mechanism and the meteorological conditions, but they needed the initial and boundary conditions, emissions inventories, and substantial computational resources. As one of the CTMs, WRF-Chem has been continually optimizing, and the improved parameterization schemes can simply and reasonably express the atmospheric movement and the reaction of air pollutants. Meanwhile, previous studies showed that the WRF-Chem model has superior performance in simulating the pollutant concentrations and is widely used [
10,
11,
12,
13,
14,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24]. Thus, for the CTM, we chose the WRF-Chem model in this study.
With the growth in big data analytics and artificial intelligence, the use of NN models had received international attention and more and more countries were conducting research in this field. The growth has provided the meteorological and environmental communities with constantly enlarging resources for data acquisition. Nowadays, many data-driven models, especially NN models, had been widely used to handle meteorological and environmental problems in different ways [
26,
27,
28,
29,
30,
31,
32]. Although NN models did not have any physical meaning, and the model performance and simulation results were closely linked to the types of input data and the amount of training data, they predicated pollutant concentrations by training NN models using the historical meteorological elements and pollutant concentrations, so the substantial computational resources and boundary conditions were not necessarily needed. The BPNN model, proposed by Rumelhart et al. [
33], was one of the most widely use artificial neural network (ANN) models. In the BPNN model, the entire arithmetic process consisted of two parts: forward propagation and error back propagation, and one can obtain satisfactory simulation results due to the reasonable arithmetic structures. The LSTM model was an extension of the recurrent neural network (RNN) models, and it can solve the exploding and vanishing gradient problem, which inhibited the simulation precision for previous RNN models. In recent years, many studies showed that the LSTM model had good results in time series simulations under specific conditions [
34,
35,
36,
37]. Meanwhile, the BPNN and LSTM models had superior performance in simulating the pollutant concentrations (
Table 1). In this study, we chose the BPNN and LSTM models to conduct model cross-validations between them both and WRF-Chem.
In this paper, the WRF-Chem model, using updated emissions inventory with finer horizontal resolution, was employed to predict the pollutant concentrations in Guangzhou. In view of the fact that the NN models had superior performances in simulating the pollutant concentrations, we also constructed the frequently used NN models to predict air pollution in Guangzhou. By comparing WRF-Chem to ground observations and the NN models, the most suitable pollutant model was then proposed. To evaluate the performance of the WRF-Chem and NN models, standard model performance metrics were adopted. Preliminary results were presented and analyzed in
Section 3 followed by discussion in
Section 4. The final section contains conclusions on the performances of the WRF-Chem and the NN models in the air pollutant concentrations forecasting.
4. Discussion
For the simulation of meteorological elements, model evaluations indicated that the meteorological elements with simulation nudging were reasonable for Guangzhou (
Figure 6). However, we found that the 10 m wind speed did not obviously improve compared with the other meteorological simulations (
Table 6). This phenomenon is caused by the presence of numerous buildings adjacent to the monitoring site. In addition, the air pollution simulation accuracy was closely related to the meteorological element simulation accuracy. On the one hand, the overestimated WS may have caused biases in the pollutant concentrations; on the other hand, the overestimated T2 and RH may have led to biases in the temperature or relative humidity-dependent reaction factors in the WRF-Chem simulation. Overall, the WRF-Chem model had an excellent performance on the meteorological element simulation in Guangzhou.
For the PM
2.5 concentration simulation, the trend and magnitude produced by the WRF-Chem simulation using the new emissions inventory were consistent with the ground observations. Temporally, there were some underestimations from 25 to 26 September and 4 to 6 October, with an increasing trend observed from 1 to 2 October; however, WRF-Chem efficiently captured the other peaks, which appeared on September 21 to 24 and 27 to 30 and other days. There was therefore a significant correlation between the WRF-Chem simulated PM
2.5 concentration and the observed concentration (R = 0.80). Although there were some underestimation and overestimation between the WRF-Chem simulated and the observed PM
2.5 concentrations, the relative errors were small. Thus, the whole simulated PM
2.5 concentration achieved our proposed objective for the MFB. In the BPNN model, the model generally underestimated PM
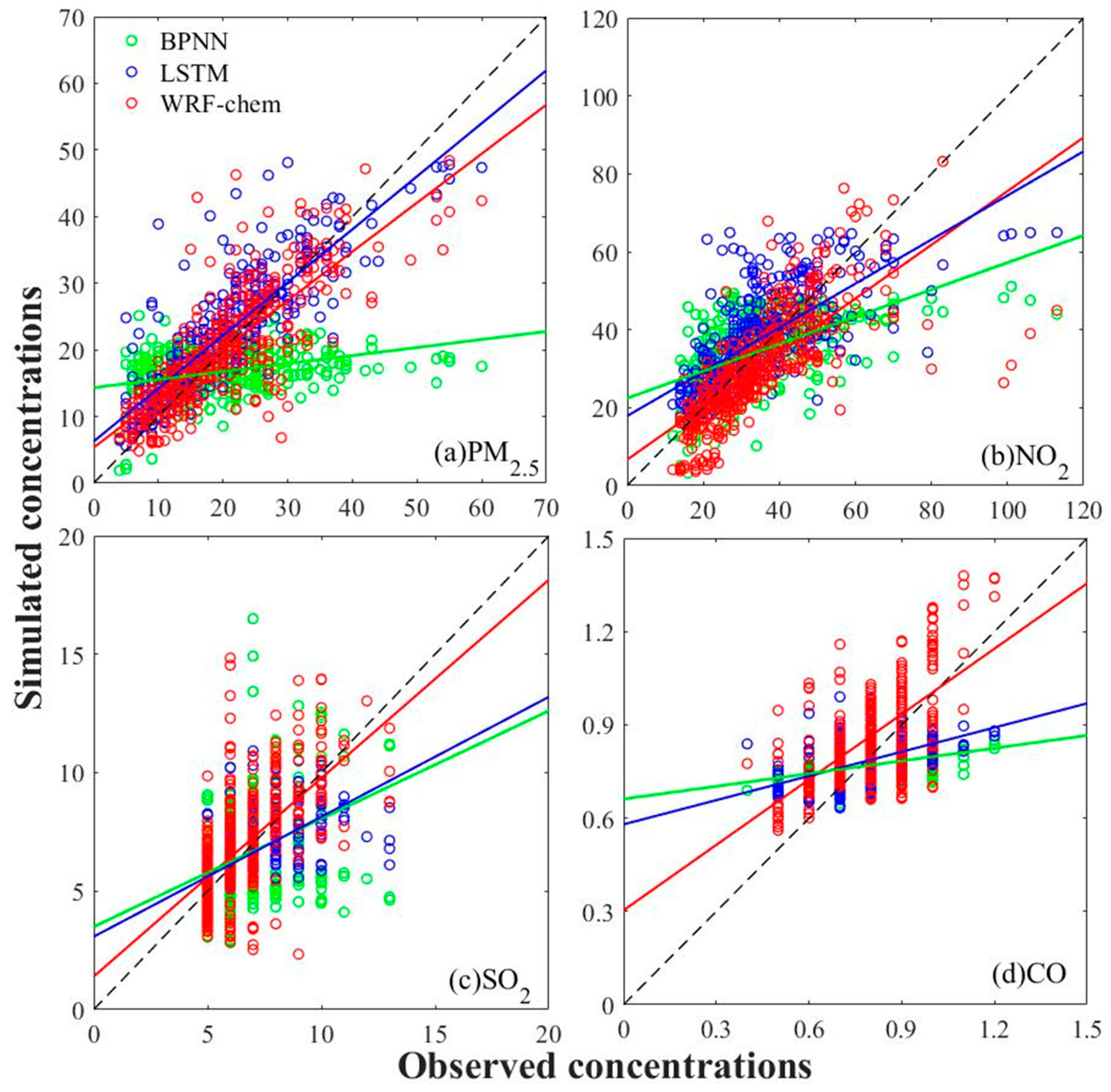
2.5 concentration and inefficiently captured the peaks. Meanwhile, the generally larger errors that led to the BPNN simulation cannot meet our proposed objective for the MFB. In addition, we found that the LSTM simulation has suboptimal MFB results in a few time periods, though the LSTM simulation had the best correlation with the observations; moreover, the LSTM could not capture the peak of the observed concentration, as compared to that of WRF-Chem, as shown in
Figure 8. To sum up, the WRF-Chem simulation was more reasonable and superior to the BPNN model, but slightly worse than the LSTM in terms of the simulation trend, errors, and correlation coefficient (c.f.,
Figure 8,
Figure 10 and
Figure 11). The results may be caused by several factors. First, there were some deviations between the WRF-Chem meteorological simulations and the observations, such as the overestimated WS, T2, and RH. The air pollution concentrations were closely related to the meteorological elements. For example, the WS had a direct influence on the dilution and diffusion of the aerosol [
60], and the other meteorological elements also affected the pollutant concentrations through the wind. The overestimated wind speed can cause an underestimated PM
2.5 concentration by the WRF-Chem model. Therefore, the meteorological simulation errors of the WRF-Chem model led to simulation pollutant concentration errors. Second, the emissions inventory provided initial conditions and emissions data of the air pollutants for the WRF-Chem model. Meanwhile, Li et al. (2017) verified that there were some differences in the simulations of different emissions inventories, and they emphasized that the low resolution and large uncertainty of the emissions inventory produce large simulation errors [
61]. In this study, the WRF-Chem emissions inventory was modified by the monthly emissions data, which were provided by the Guangzhou Environmental Monitoring Centre, and the frequency of the modification was one month. Unfortunately, we cannot obtain the actual spatial distributions of the daily and hourly emissions data to modify the emissions inventory more accurately, so that partial nondeterminacy exists in the new emissions inventory [
62]. Ultimately, the nondeterminacy caused the simulation errors in the WRF-Chem model. Third, the BPNN algorithms are used as a black-box so that we cannot clearly explain how the BPNN model estimates the pollutant concentrations. Meanwhile, the approximation and generalization abilities of the NN models were closely related to the input data [
63]. There were few types of input data and a small amount of training data for the BPNN model in this study, so the BPNN model simulation was not satisfactory. Finally, unlike the traditional RNNs, the LSTM model is capable of learning the long time series, and it can effectively and automatically extract the temporal correlation within the pollutant concentrations. Meanwhile, the LSTM model was not influenced by the vanishing gradient problem. These features were extremely important for simulating the precise temporal pollutant processes. Therefore, the LSTM model can accurately simulate the pollutant concentrations with the obvious change characteristics of a time series. Moreover, using the auxiliary data (i.e., T2, RH, WS, and WD) can enhance the simulation performances in the LSTM model [
32]. The PM
2.5 concentrations were greatly increased and the change was evident during this observation period, so the LSTM model captured the temporal variations well. In total, WRF-Chem simulated PM
2.5 concentration, more reasonably reflected hourly variability, and actually captured peaks of the observations.
For the NO
2 concentration simulation, the WRF-Chem model underestimated the NO
2 concentrations from 5 to 7 October, and this finally caused some simulated concentrations that cannot achieve our proposed objective for the MFB. During this period, the emissions inventory was less accurate for NO
2 concentration simulation; moreover, the WRF-Chem simulated high wind speeds may account for the NO
2 concentration underestimation. However, in general, the WRF-Chem model simulated the trend and magnitude well. In terms of the NO
2 concentration simulations, the WRF-Chem model significantly outperformed the LSTM and BPNN models, and had a large advantage with an accurate simulation. For the SO
2 and CO concentration simulations, we filter the observed data, i.e., if more than 25% of the observed values were below the detection limit, we cannot account for these data in our study. We found that both types of air pollutants met the data demand. By comparing the different models’ simulated results, the WRF-Chem model was superior to the LSTM and BPNN models in the simulated trend, error, performance, etc. In addition, the BPNN model cannot yet capture the SO
2 and CO concentration temporal variations, although the whole simulated results achieved our proposed objective for the MFB. Meanwhile, the CCs for SO
2 (R = 0.60) and CO (R = 0.50) were slightly inferior to those of other air pollutants by the LSTM. Several factors accounted for these phenomena. First, the WRF-Chem meteorological simulation errors and partial nondeterminacy of the emissions inventory were not ignorable, as stated earlier. Second, previous studies showed that the microphysics and CBMZ gas-phase chemistry mechanisms in the WRF-Chem model need to be further improved for better simulations [
20,
64]. For the microphysics mechanism, there were lower cloud fractions and liquid water path in the WRF-Chem model, which could result in the weak in-cloud sulfate and the lower sulfate mass. For the chemical mechanism, the CBMZ gas-phase chemistry mechanism had produced an incorrect conversion rate for SO
2 to sulfate; meanwhile, the mechanism did not consider the parameters on the heterogeneous reaction rate. These limitations ultimately led to the simulation bias for SO
2 in WRF-Chem. Third, the precision of the observation instrument for the SO
2 and CO concentrations was significantly smaller than those of the models’ simulations; therefore, the observations could not reflect subtle changes in the trend, which existed in the model simulation. Finally, the SO
2 and CO concentration time series had no obvious regularities. As mentioned above, the LSTM cannot effectively simulate variables without temporal regularity; hence, the LSTM led to inaccurate simulations. In summary, WRF-Chem was superior to the LSTM and BPNN models for simulating SO
2 and CO concentrations.
All things considered, the WRF-Chem model can accurately predict all the air pollutant concentrations and reasonably capture their diurnal variability after mitigating air pollution. Meanwhile, it was the most suitable pollutant model in Guangzhou, because the WRF-Chem model had a superior model performance and better simulated results than the NN models. Furthermore, WRF-Chem can provide source apportionment, transboundary transport, and backward trajectories for different pollutants in future studies, which is not possible with the LSTM and BPNN models.
5. Conclusions
Selecting an appropriate model to precisely predict pollutant concentrations remains a challenge in pollution control and environmental management. This study focused on the performance of the WRF-Chem model in simulating the PM2.5, NO2, SO2, and CO concentrations in Guangzhou. We also performed comparisons to evaluate the differences between the WRF-Chem and NN models with respect to the observed concentrations. The main findings of this study are summarized as follows:
- (1)
Compared with the monitoring station observations, WRF-Chem can reasonably simulate the magnitude and temporal variations in the air pollutant concentrations, capture the peaks of the observed concentrations, and conform to the evaluation criterion for model performance.
- (2)
For the PM2.5 concentration simulations, WRF-Chem was superior to the BPNN model in all respects such as simulation bias, correlation coefficient, and model performance. Although the WRF-Chem correlation coefficient and model performance were slightly worse than those of the LSTM, WRF-Chem more effectively simulated the extremum than the LSTM. For the other pollutant concentrations, the WRF-Chem model correlation coefficients and model performances were better than those of the LSTM and BPNN. According to the negligible simulation error, excellent simulation performance, and high correlation, the WRF-Chem simulation was superior and the most reasonable for all pollutants.
- (3)
As model input data, the observed pollutant concentrations were directly related to the NN model simulated results. In other words, the types and amounts of input data had a crucial influence on the simulation accuracies and performances of the NN models, especially for the BPNN model. If there are enough types and amounts of input data, the BPNN model can use the gradient search technique to minimize the MSE between the output data and testing data. In this case, the BPNN model can accurately simulate the pollutant concentrations. The LSTM model simulated the pollutant concentrations by effectively and automatically extracting the temporal correlations within the previous concentrations (the input data), so they also influenced the LSTM model performance. The LSTM model can capture the pollutant concentrations and have considerable model performance, on condition that the pollutant concentration time series had obvious regularities. However, insufficient types and amounts of input data, and the limited accuracies of the SO2 and CO measuring apparatuses, ultimately resulted in relatively poor NN models’ performance.
- (4)
The meteorological input data, which served as the initial and boundary meteorological conditions for the WRF-Chem model, were indispensable. Meanwhile, the meteorological input data helped us obtain precise meteorological element simulations, and ultimately enhance the simulation accuracy of the pollutant concentration. As emission input data, the emissions inventories directly provide the emissions data (i.e., the emission rate and the emission allocation) to the WRF-Chem model, so the modified emissions inventories can contribute largely and positively to accurate pollutant concentration simulations in the study.
In summary, this suggests several important points: (1) the emissions inventory revision time interval should be more accurate; (2) the NO2, SO2, and CO emissions were imprecise in the new emissions inventory; (3) the parameterization schemes and gas-phase chemistry mechanism need further improvement for better simulating the SO2 and CO concentrations; (4) the BPNN model needs more types of input data to improve the pollutant concentration simulation accuracy; and (5) the SO2 and CO observed concentration time series had no obvious regularities, so the LSTM model cannot capture the concentration temporal variation.
Generally, the WRF-Chem model had a significant positive influence on the simulated pollutant concentrations in Guangzhou. We suggest using the WRF-Chem model to simulate the PM2.5 and NO2 concentrations owing to its precise and reasonable simulations, as well as the presence of several improvements in the simulations compared with the BPNN and LSTM models. Additionally, the WRF-Chem simulated SO2 and CO concentrations were broadly similar to the observations, but there were some differences which require more accurate daily or hourly emissions data. Therefore, building hourly emissions inventories requires a higher spatial resolution, up-to-date provincial emissions data, and extra monitoring data. The application of accurate daily or hourly emissions can provide improvements in the WRF-Chem simulation compared with NN models.

 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}