Observational Practices for Urban Microclimates Using Meteorologically Instrumented Unmanned Aircraft Systems

 ,
,  ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Unmanned Aircraft Systems as Observational Tools
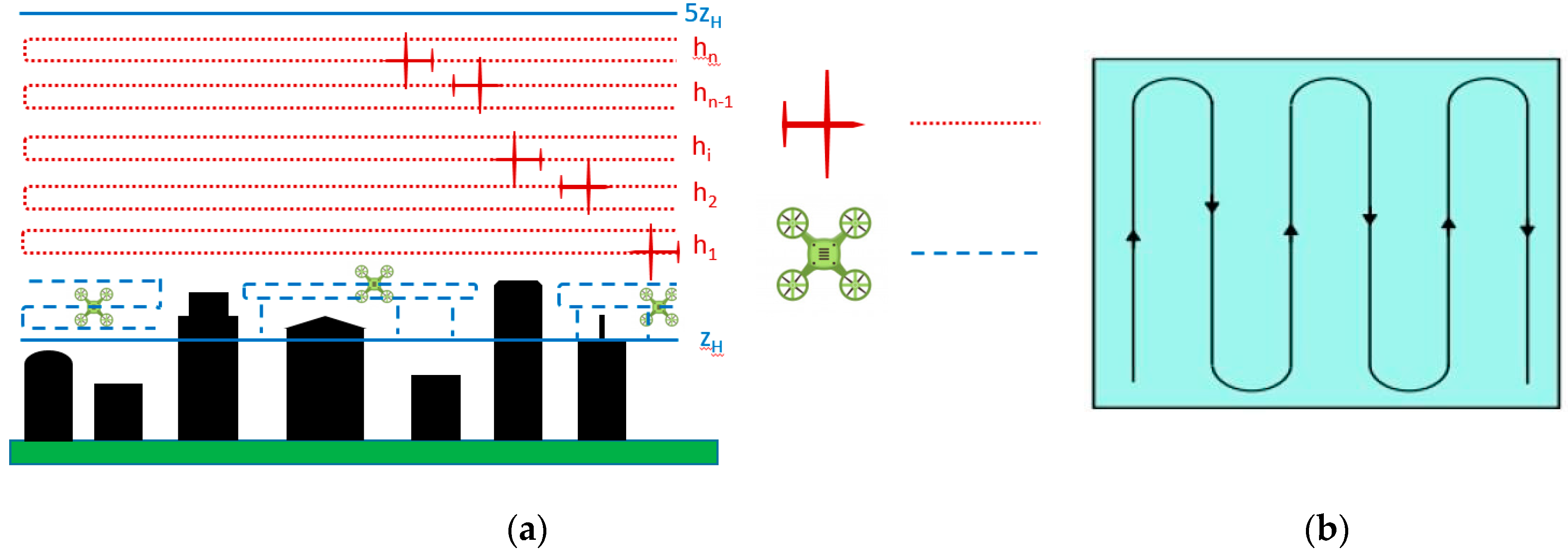
3. Concept of Operations
4. Field Campaign
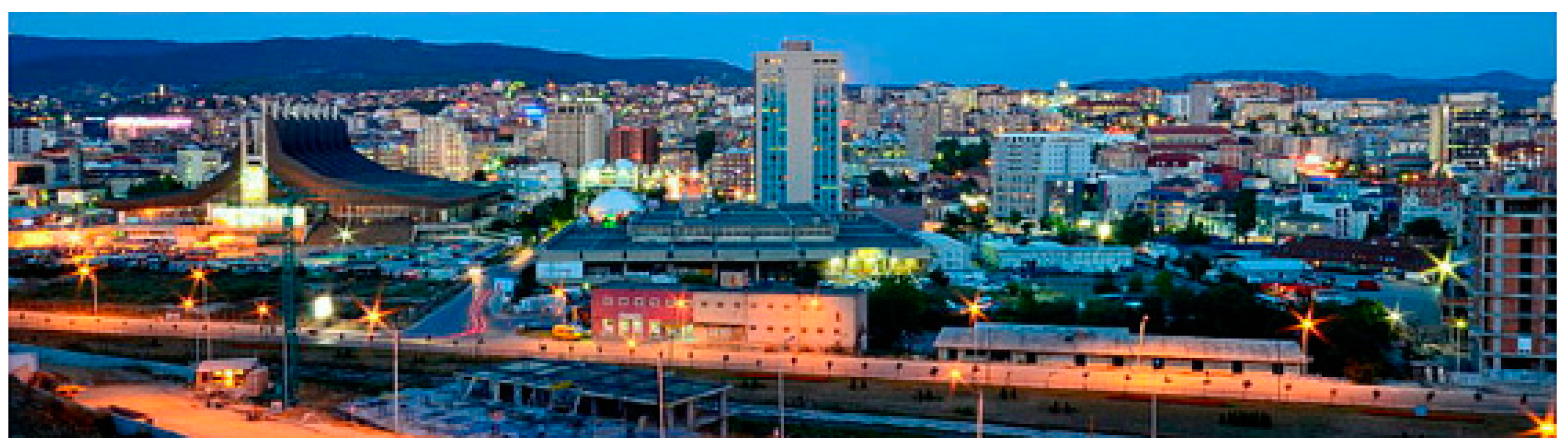
4.1. Experiment Setting
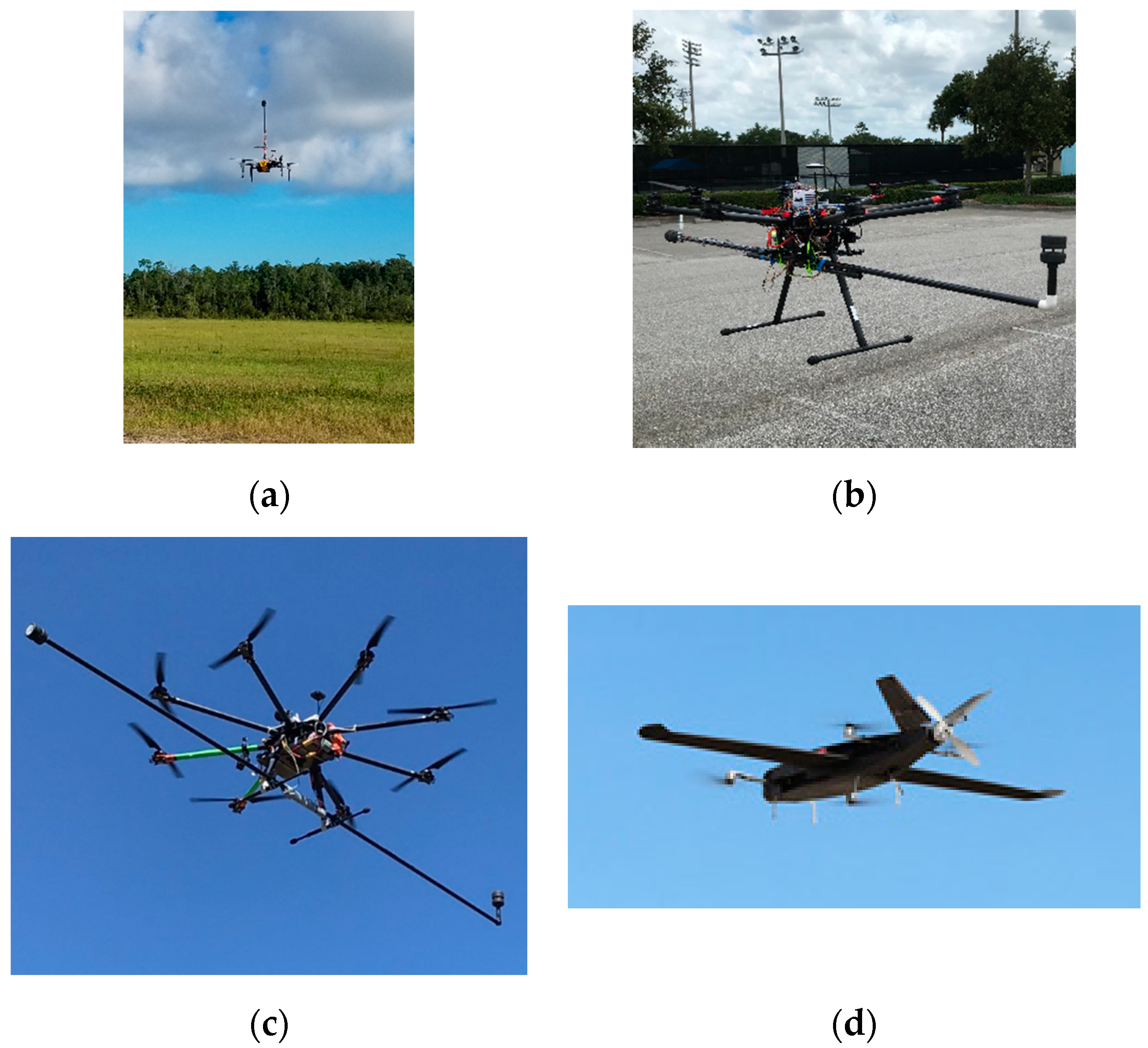
4.2. Observation Platforms
4.3. Campaign Challenges, Lessons Learned and Best Practices
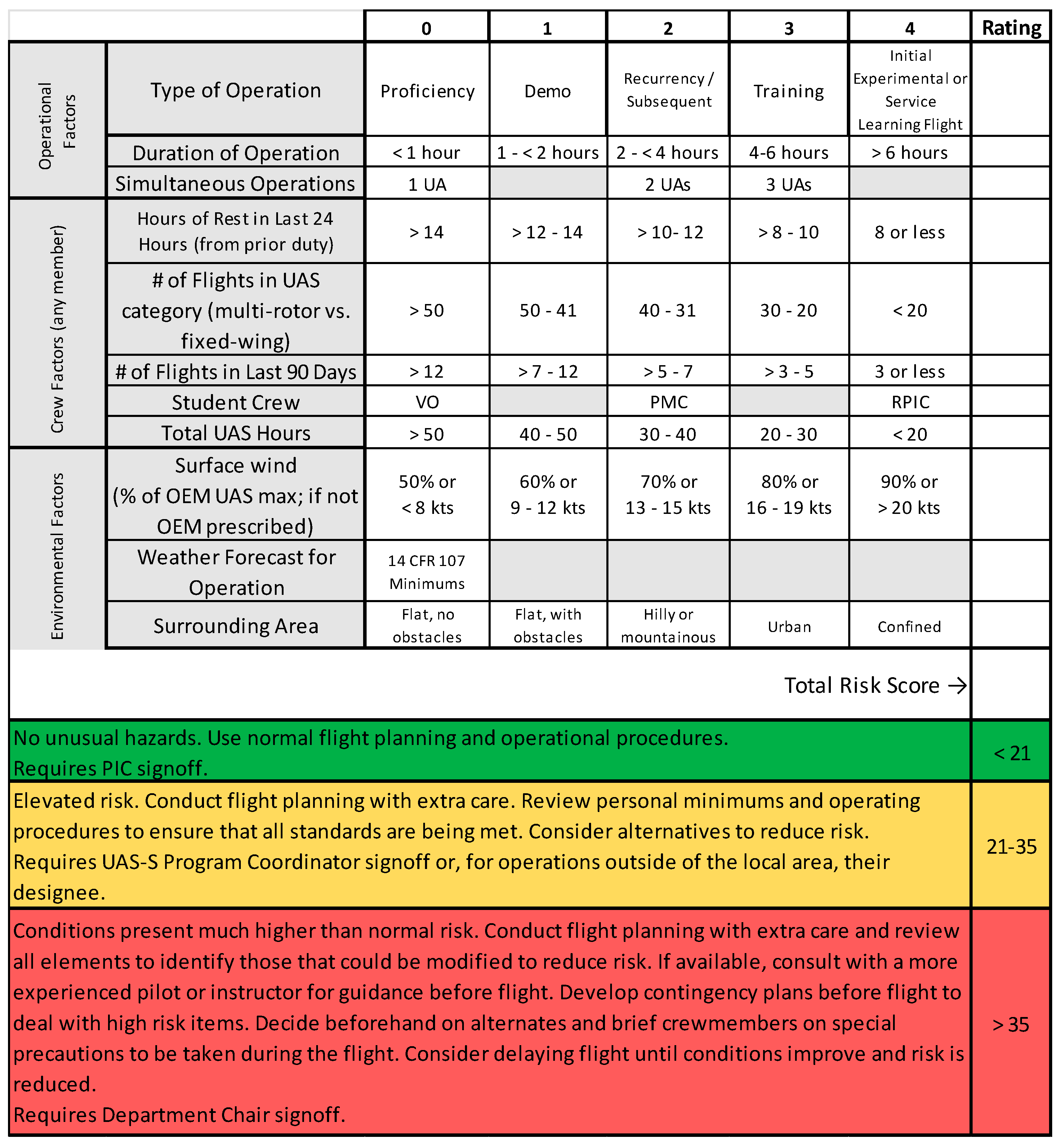
4.3.1. Operational
4.3.2. Technical
4.3.3. Personnel
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Oke, T. The distinction between canopy and boundary-layer urban heat islands. Atmosphere 1976, 14, 268–277. [Google Scholar] [CrossRef] [Green Version]
- Roth, M. Review of atmospheric turbulence over cities. Q. J. R. Meteorol. Soc. 2000, 126, 941–990. [Google Scholar] [CrossRef]
- Oke, T. Boundary Layer Climates, 2nd ed.; Routledge: London, UK, 1987. [Google Scholar]
- Britter, R.; Hanna, S. Flow and dispersion in urban areas. Annu. Rev. Fluid Mech. 2003, 35, 469–496. [Google Scholar] [CrossRef]
- Grimmond, C.S.B. Progress in measuring and observing the urban atmosphere. Theor. Appl. Climatol. 2005, 84, 3–22. [Google Scholar] [CrossRef]
- Martilli, A. Current research and future challenges in urban mesoscale modelling. Int. J. Climatol. 2007, 27, 1909–1918. [Google Scholar] [CrossRef]
- Barlow, J.F.; Coceal, O. A Review of Urban Roughness Sublayer Turbulence. In UK Met Office Technical Report; Reading University: Reading, UK, 2009; p. 68. [Google Scholar]
- Fernando, H. Fluid dynamics of urban atmospheres in complex terrain. Annu. Rev. Fluid Mech. 2010, 42, 365–389. [Google Scholar] [CrossRef]
- Barlow, J.F. Progress in observing and modelling the urban boundary layer. Urban Clim. 2014, 10, 216–240. [Google Scholar] [CrossRef] [Green Version]
- Rotach, M.W. Turbulence close to a rough urban surface.1. Reynolds stress. Bound. Layer Meteorol. 1993, 65, 1–28. [Google Scholar] [CrossRef]
- Roth, M. Turbulent transfer relationships over an urban surface.2. Integral statistics. Q. J. R. Meteorol. Soc. 1993, 119, 1105–1120. [Google Scholar] [CrossRef]
- Roth, M.; Oke, T.R. Turbulent transfer relationships over an urban surface.1. spectral characteristics. Q. J. R. Meteorol. Soc. 1993, 119, 1071–1104. [Google Scholar]
- Grimmond, C.S.B.; Oke, T.R. Turbulent heat fluxes in urban areas: Observations and a local-scale urban meteorological parameterization scheme (LUMPS). J. Appl. Meteorol. 2002, 41, 792–810. [Google Scholar] [CrossRef] [Green Version]
- Kanda, M.; Moriwaki, R.; Kasamatsu, F. Large-eddy simulation of turbulent organized structures within and above explicitly resolved cube arrays. Bound. Layer Meteorol. 2004, 112, 343–368. [Google Scholar] [CrossRef]
- Feigenwinter, C.; Vogt, R. Detection and analysis of coherent structures in urban turbulence. Theor. Appl. Climatol. 2005, 81, 219–230. [Google Scholar] [CrossRef] [Green Version]
- Moriwaki, R.; Kanda, M. Flux-gradient profiles for momentum and heat over an urban surface. Theor. Appl. Climatol. 2006, 84, 127–135. [Google Scholar] [CrossRef]
- Christen, A.; van Gorsel, E.; Vogt, R. Coherent structures in urban roughness sublayer turbulence. Int. J. Climatol. 2007, 27, 1955–1968. [Google Scholar] [CrossRef]
- Horiguchi, M.; Hayashi, T.; Hashiguchi, H.; Ito, Y.; Ueda, H. Observations of coherent turbulence structures in the near-neutral atmospheric boundary layer. Bound. Layer Meteorol. 2010, 136, 25–44. [Google Scholar] [CrossRef] [Green Version]
- Wood, C.R.; Lacser, A.; Barlow, J.F.; Padhra, A.; Belcher, S.E.; Nemitz, E.; Helfter, C.; Famulari, D.; Grimmond, C.S.B. Turbulent flow at 190 m height above London during 2006–2008: A climatology and the applicability of similarity theory. Bound. Layer Meteorol. 2010, 137, 77–96. [Google Scholar] [CrossRef] [Green Version]
- Baars, H.; Ansmann, A.; Engelmann, R.; Althausen, D. Continuous monitoring of the boundary-layer top with lidar. Atmos. Chem. Phys. 2008, 8, 7281–7296. [Google Scholar] [CrossRef] [Green Version]
- van der Kamp, D.; McKendry, I. Diurnal and seasonal trends in convective mixed-layer heights estimated from two years of continuous ceilometer observations in Vancouver, BC. Bound. Layer Meteorol. 2010, 137, 459–475. [Google Scholar] [CrossRef]
- Haman, C.L.; Lefer, B.; Morris, G.A.; Haman, C.L.; Lefer, B.; Morris, G.A. Seasonal variability in the diurnal evolution of the boundary layer in a near-coastal urban environment. J. Atmos. Ocean. Technol. 2012, 29, 697–710. [Google Scholar] [CrossRef]
- Tang, G.; Zhang, J.; Zhu, X.; Song, T.; Münkel, C.; Hu, B.; Schäfer, K.; Liu, Z.; Zhang, J.; Wang, L.; et al. Mixing layer height and its implications for air pollution over Beijing, China. Atmos. Chem. Phys. 2016, 16, 2459–2475. [Google Scholar] [CrossRef] [Green Version]
- Peng, J.; Grimmond, C.S.B.; Fu, X.; Chang, Y.; Zhang, G.; Guo, J.; Tang, C.; Gao, J.; Xu, X.; Tan, J. Ceilometer based analysis of Shanghai’s boundary layer height (under rain and fog free conditions). J. Atmos. Ocean. Technol. 2017, 34, 749–764. [Google Scholar] [CrossRef]
- Chrysoulakis, N.; Grimmond, S.; Feigenwinter, C.; Lindberg, F.; Gastellu-Etchegorry, J.-P.; Marconcini, M.; Mitraka, Z.; Stagakis, S.; Crawford, B.; Olofson, F.; et al. Urban energy exchanges monitoring from space. Sci. Rep. 2018, 8, 11498. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kotthaus, S.; Grimmond, C.S.B. Atmospheric boundary layer characteristics from Ceilometer measurements part 2: Application to London’s urban boundary layer. Q. J. R. Meteorol. Soc. 2018, 144, 1511–1524. [Google Scholar] [CrossRef] [Green Version]
- Dou, J.; Grimmond, S.; Cheng, Z.; Miao, S.; Feng, D.; Liao, M. Summertime surface energy balance fluxes at two Beijing sites. Int. J. Climatol. 2019, 39, 2793–2810. [Google Scholar] [CrossRef] [Green Version]
- Castro, I.; Cheng, H.; Reynolds, R. Turbulence over urban-type roughness: Deductions from wind-tunnel measurements. Bound. Layer Meteorol. 2006, 118, 109–131. [Google Scholar] [CrossRef]
- Cheng, H.; Castro, I.P. Near wall flow over urban-like roughness. Bound. Layer Meteorol. 2002, 104, 229–259. [Google Scholar] [CrossRef]
- Castro, I.P.; Xie, Z.-T.; Fuka, V.; Robins, A.G.; Carpentieri, M.; Hayden, P.; Hertwig, D.; Coceal, O. Measurements and Computations of Flow in an Urban Street System. Bound. Layer Meteorol. 2017, 162, 207–230. [Google Scholar] [CrossRef]
- Carpentieri, M.; Robins, A.G. Influence of urban morphology on air flow over building arrays. J. Wind Eng. Ind. Aerodyn. 2015, 145, 61–74. [Google Scholar] [CrossRef] [Green Version]
- Ricci, A.; Kalkman, I.; Blocken, B.; Burlando, M.; Freda, A.; Repetto, M.P. Local-scale forcing effects on wind flows in an urban environment: Impact of geometrical simplifications. J. Wind Eng. Ind. Aerodyn. 2017, 170, 238–255. [Google Scholar] [CrossRef]
- Hertwig, D.; Gough, H.L.; Grimmond, S.; Barlow, J.F.; Kent, C.W.; Lin, W.E.; Robins, A.G.; Hayden, P. Wake Characteristics of Tall Buildings in a Realistic Urban Canopy. Bound. Layer Meteorol. 2019, 172, 239–270. [Google Scholar] [CrossRef] [Green Version]
- Schrijvers, P.J.C.; Jonker, H.J.J.; Kenjeres, S.; de Roode, S.R. Breakdown of the night time urban heat island energy budget. Build. Environ. 2015, 83, 50–64. [Google Scholar] [CrossRef]
- Caton, F.; Britter, R.E.; Dalziel, S. Dispersion mechanisms in a street canyon. Atmos. Environ. 2003, 37, 693–702. [Google Scholar] [CrossRef]
- Salizzoni, P.; Soulhac, L.; Mejean, P. Street canyon ventilation and atmospheric turbulence. Atmos. Environ. 2009, 43, 5056–5067. [Google Scholar] [CrossRef]
- Li, X.X.; Britter, R.; Norford, L.K. Effect of stable stratification on dispersion within urban street canyons: A large-eddy simulation. Atmos. Environ. 2016, 144, 47–59. [Google Scholar] [CrossRef] [Green Version]
- Uehara, K.; Murakami, S.; Oikawa, S.; Wakamatsu, S. Wind tunnel experiments on howthermal stratification affects flow in and above urban street canyons. Atmos. Environ. 2000, 34, 1553–1562. [Google Scholar] [CrossRef]
- Kanda, I.; Yamao, Y. Passive scalar diffusion in and above urban-like roughness under weakly stable and unstable thermal stratification conditions. J. Wind Eng. Ind. Aerodyn. 2016, 148, 18–33. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Y.; Zhang, S.; Li, Y.; Lu, H.; Shi, K.; Niu, Z. Social weather: A review of crowdsourcing-assisted meteorological knowledge services through social cyberspace. Geosci. Data J. 2019. [Google Scholar] [CrossRef] [Green Version]
- Muller, C.L.; Chapman, L.; Johnston, S.; Kidd, C.; Illingworth, S.; Foody, G.; Leigh, R.R. Crowdsourcing for climate and atmospheric sciences: Current status and future potential. Int. J. Climatol. 2015, 35, 3185–3203. [Google Scholar] [CrossRef] [Green Version]
- United Nations World Urbanization Prospects. 2018. Available online: https://population.un.org/wup/Publications/Files/WUP2018-Highlights.pdf (accessed on 7 October 2019).
- United States Census Bureau Geography Program. 2019. Available online: https://www.census.gov/programs-surveys/geography.html (accessed on 7 October 2019).
- Hill, M.L.; Konrad, T.G.; Meyer, J.H.; Rowland, J.R. A small, radio-controlled aircraft as a platform for meteorological sensors. Johns Hopkins APL Tech. Dig. 1970, 10, 11–19. [Google Scholar]
- Bonin, T.; Chilson, P.; Zielke, B.; Fedorovich, E. Observations of the early evening boundary-layer transition using a small unmanned aerial system. Bound. Layer Meteorol. 2013, 146, 119–132. [Google Scholar] [CrossRef]
- Wainwright, C.; Bonin, T.; Chilson, P.; Gibbs, J.; Fedorovich, E.; Palmer, R. Methods for evaluating the temperature structure-function parameter using unmanned aerial systems and large-eddy simulation. Bound. Layer Meteorol. 2015, 155, 189–208. [Google Scholar] [CrossRef]
- Cassano, J.J. Observations of atmospheric boundary layer temperature profiles with a small unmanned aerial vehicle. Antarct. Sci. 2014, 26, 205–213. [Google Scholar] [CrossRef] [Green Version]
- Knuth, S.L.; Cassano, J.J.; Maslanik, J.A.; Herrmann, P.D.; Kernebone, P.A.; Crocker, R.I.; Logan, N.J. Unmanned aircraft system measurements of the atmospheric boundary layer over terra nova bay, antarctica. Earth Syst. Sci. Data 2013, 5, 57–69. [Google Scholar] [CrossRef] [Green Version]
- Mayer, S.; Jonassen, M.; Sandvik, A.; Reuder, J. Profiling the arctic stable boundary layer in advent valley, svalbard: Measurements and simulations. Bound. Layer Meteorol. 2012, 143, 507–526. [Google Scholar] [CrossRef] [Green Version]
- Reuder, J.; Brisset, P.; Jonassen, M.; Müller, M.; Mayer, S. SUMO: A small unmanned meteorological observer for atmospheric boundary layer research. In Proceedings of the IOP Conference Series: Earth & Environmental Science, Roskilde, Denmark, 23–25 June 2008; Volume 1. [Google Scholar]
- Cook, D.E.; Strong, P.A.; Garrett, S.A.; Marshall, R.E. A small unmanned aerial system (UAS) for coastal atmospheric research: Preliminary results from New Zealand. J. R. Soc. N. Z. 2013, 43, 108–115. [Google Scholar] [CrossRef] [Green Version]
- Jonassen, M.O.; Ólafsson, H.; Águstsson, O.; Rognvaldsson, O.; Reuder, J. Improving high resolution numerical weather simulations by assimilating data from an unmanned aerial system. Mon. Weather Rev. 2012, 140, 3734–3756. [Google Scholar] [CrossRef] [Green Version]
- Jonassen, M.; Tisler, P.; Altstädter, B.; Scholtz, A.; Vihma, T.; Lampert, A.; König-Langlo, G.; Lüpkes, C. Application of remotely piloted aircraft systems in observing the atmospheric boundary layer over antarctic sea ice in winter. Polar Res. 2015, 34, 25651. [Google Scholar] [CrossRef] [Green Version]
- Reineman, B.; Lenain, L.; Melville, W. The use of ship-launched fixed-wing UAVs for measuring the marine atmospheric boundary layer and ocean surface processes. J. Atmos. Ocean. Technol. 2016, 33. [Google Scholar] [CrossRef]
- Adkins, K.; Sescu, A.; Swinford, C.; Rentzke, N. Nocturnal Observations of Thermodynamic and Kinematic Properties in a Wind Turbine Array Boundary Layer Using an Instrumented Unmanned Aerial System. In Proceedings of the Fall Meeting AGU, San Francisco, CA, USA, 9–13 December 2019. [Google Scholar]
- Wang, S.; Garcia, M.; Bauer-Gottwein, P.; Jakobsen, J.; Zarco-Tejada, P.J.; Bandini, F.; Ibrom, A. High spatial resolution monitoring land surface energy, water and CO2 fluxes from an unmanned aerial system. Remote Sens. Environ. 2019, 229, 14–31. [Google Scholar] [CrossRef]
- Koch, S.E.; Fengler, M.; Chilson, P.B.; Elmore, K.L.; Argrow, B.; Andra, D.L.; Lindley, T. On the use of unmanned aircraft for sampling mesoscale phenomena in the preconvective boundary layer. J. Atmos. Ocean. Technol. 2018, 35, 2265–2288. [Google Scholar] [CrossRef]
- Cione, J.J.; Bryan, G.H.; Dobosy, R.; Zhang, J.A.; de Boer, G.; Aksoy, A.; Wadler, J.B.; Kalina, E.A.; Dahl, B.A.; Ryan, K.; et al. Eye of the Storm: Observing Hurricanes with a Small Unmanned Aircraft System. Bull. Am. Meteorol. Soc. 2020, 101, E186–E205. [Google Scholar] [CrossRef]
- Adkins, K.A.; Sescu, A. Observations of relative humidity in the near-wake of a wind turbine using an instrumented unmanned aerial system. Int. J. Green Energy 2017, 14, 845–860. [Google Scholar] [CrossRef]
- Adkins, K.A.; Sescu, A. Analysis of near-surface relative humidity in a wind turbine array boundary layer using an instrumented unmanned aerial system and large-eddy simulation. Wind Energy 2018, 21, 1155–1168. [Google Scholar] [CrossRef]
- Flagg, D.D.; Doyle, J.D.; Holt, T.R.; Tyndall, D.P.; Amerault, C.M.; Geiszler, D.; Eleuterio, D.P. On the impact of unmanned aerial system observations on numerical weather prediction in the coastal zone. Mon. Weather Rev. 2018, 146, 599–622. [Google Scholar] [CrossRef]
- Mayer, S.; Sandvik, A.; Jonassen, M.; Reuder, J. Atmospheric profiling with the UAS sumo: A new perspective for the evaluation of fine-scale atmospheric models. Meteorol. Atmos. Phys. 2012, 116, 15–26. [Google Scholar] [CrossRef]
- Brosy, C.; Krampf, K.; Zeeman, M.; Wolf, B.; Junkermann, W.; Schäfer, K.; Emeis, S.; Kunstmann, H. Simultaneous multicopter-based air sampling and sensing of meteorological variables. Atmos. Meas. Tech. 2017, 10, 2773–2784. [Google Scholar] [CrossRef] [Green Version]
- Schuyler, T.; Guzman, M. Unmanned aerial systems for monitoring trace tropospheric gases. Atmosphere 2017, 8, 206. [Google Scholar] [CrossRef] [Green Version]
- Balsley, B.; Lawrence, D.; Woodman, R.; Fritts, D. Fine-scale characteristics of temperature, wind, and turbulence in the lower atmosphere (0–1300 m) over the South Peruvian Coast. Bound. Layer Meteorol. 2013, 147, 165–178. [Google Scholar] [CrossRef] [Green Version]
- Neumann, P.P.; Bartholmai, M. Real-time wind estimation on a micro unmanned aerial vehicle using its inertial measurement unit. Sens. Actuators A Phys. 2015, 235, 300–310. [Google Scholar] [CrossRef]
- Prudden, S.; Fisher, A.; Marino, M.; Mohamed, A.; Watkins, S.; Wild, G. Measuring wind with small unmanned aircraft systems. J. Wind Eng. Ind. Aerodyn. 2018, 176, 197–210. [Google Scholar] [CrossRef]
- Witte, B. Development of an Unmanned Aerial Vehicle for Atmospheric Turbulence Measurement. Theses Diss. Mech. Eng. 2016, 82. [Google Scholar] [CrossRef]
- Witte, B.; Singler, R.; Bailey, S. Development of an unmanned aerial vehicle for the measurement of turbulence in the atmospheric boundary layer. Atmosphere 2017, 8, 195. [Google Scholar] [CrossRef] [Green Version]
- Yeung, A.; Bramesfeld, G.; Chung, J. Measuring low-altitude wind gusts using the unmanned aerial vehicle GustAV. J. Unmanned Veh. Syst. 2018, 6, 235–248. [Google Scholar] [CrossRef] [Green Version]
- Jacob, R. Using UAV’s to Measure the Urban Boundary Layer. In Proceedings of the AGU Fall Meeting, San Francisco, CA, USA, 14–18 December 2015. [Google Scholar]
- Guimarães, P.; Ye, J.; Batista, C.; Barbosa, R.; Ribeiro, I.; Medeiros, A.; Souza, R.; Martin, S.T. Vertical profiles of ozone concentration collected by an unmanned aerial vehicle and the mixing of the nighttime boundary layer over an amazonian urban area. Atmosphere 2019, 10, 599. [Google Scholar] [CrossRef] [Green Version]
- Pikridas, M.; Bezantakos, S.; Močnik, G.; Keleshis, C.; Brechtel, F.; Stavroulas, I.; Sciare, J. On-flight intercomparison of three miniature aerosol absorption sensors using unmanned aerial systems (UASs). Atmos. Meas. Tech. 2019, 12, 6425–6447. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q. Real-time atmospheric monitoring of urban air pollution using unmanned aerial vehicles. WIT Trans. Ecol. Environ. 2019, 236, 79. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Chang, C.; Chen, W.; Tsai, Y.; Chang, S. Determination of the vertical profile of aerosol chemical species in the microscale urban environment. Environ. Pollut. 2018, 243 Pt B, 1360–1367. [Google Scholar] [CrossRef]
- Loxton, B.; Abdulrahim, M.; Watkins, S. An investigation of fixed & rotary wing MAV flight in replicated atmospheric turbulence. In Proceedings of the 46th AIAA Aerospace Sciences Meeting and Exhibit, Reno, Nevada, 7–10 January 2008. [Google Scholar] [CrossRef]
- Watkins, A.; Thompson, M.; Shortis, M.; Segal, R.; Abdulrahim, M.; Sheridan, J. An overview of experiments on the dynamic sensitivity of MAVs to turbulence. Aeronaut. J. 2010, 114, 485–492. [Google Scholar] [CrossRef]
- Dias, N.; Gonçalves, J.; Freire, L.; Hasegawa, T.; Malheiros, A. Obtaining Potential Virtual Temperature Profiles, Entrainment Fluxes, and Spectra from Mini Unmanned Aerial Vehicle Data. Bound. Layer Meteorol. 2012, 145, 93–111. [Google Scholar] [CrossRef]
- Palomaki, R.T.; Rose, N.T.; van den Bossche, M.; Sherman, T.J.; De Wekker Stephan, F.J. Wind estimation in the lower atmosphere using multirotor aircraft. J. Atmos. Ocean. Technol. 2017, 34, 1183–1191. [Google Scholar] [CrossRef]
- Wolf, C.A.; Hardis, R.P.; Woodrum, S.D.; Galan, R.S.; Wichelt, H.S.; Metzger, M.C.; de Wekker Stephan, F.J. Wind data collection techniques on a multi-rotor platform. In Proceedings of the 2017 Systems and Information Engineering Design Symposium (SIEDS), Charlottesville, VA, USA, 28 April 2017; IEEE: New York, NY, USA, 2017. [Google Scholar] [CrossRef]
- Rodriguez, L.; Cobano, J.A.; Ollero, A. Wind characterization and mapping using fixed-wing small unmanned aerial systems. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016. [Google Scholar]
- Xiang, X.; Wang, Z.; Mo, Z.; Chen, G.; Pham, K.; Blasch, E. Wind field estimation through autonomous quadcopter avionics. In Proceedings of the 2016 IEEE/AIAA 35th Digital Avionics Systems Conference (DASC), Sacramento, CA, USA, 25–29 September 2016; pp. 1–6. [Google Scholar] [CrossRef]
- van Hove, L.W.A.; Steeneveld, G.J.; Jacobs, C.M.J.; Heusinkveld, B.G.; Elbers, J.A.; Holtslag, A.A.M. Exploring the Urban Heat Island Intensity of Dutch Cities. Plant J. 2011, 2170, 34. [Google Scholar]
- Mayer, H.; Matzarakis, A.; Iziomon, M.G. Spatio-temporal variability of moisture conditions within the urban canopy layer. Theor. Appl. Climatol. 2003, 76, 165–179. [Google Scholar] [CrossRef]
- Oke, T.; Mills, G.; Christen, A.; Voogt, J. Urban Climates; Cambridge University Press: Cambridge, UK, 2017. [Google Scholar] [CrossRef] [Green Version]
- Stewart, I.D.; Oke, T. Local Climate Zones for Urban Temperature Studies. Bull. Am. Meteorol. Soc. 2012, 93, 1879–1900. [Google Scholar] [CrossRef]
- The Republic of Kosovo, Pristina. 2019. Available online: https://kk.rks-gov.net/prishtine (accessed on 7 October 2019).
- SkyscraperCity. 2019. Available online: https://www.skyscrapercity.com (accessed on 7 October 2019).
- Macchiarella, N.D.; Adkins, K.A.; Wallace, R. Using Small Unmanned Aircraft Systems for Remote Sensing and Data Collection: Aerospace Education and Service Learning. In Proceedings of the 2020 AIAA SciTech Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar] [CrossRef]
- Adkins, K.; Swinford, C.; Wambolt, P.; Bease, G. Development of a sensor suite for atmospheric boundary layer measurement with a small multirotor unmanned aerial system. Int. J. Aviat. Aeronaut. Aerosp. 2020, 7, 4. [Google Scholar] [CrossRef]
- Adkins, K.; Swinford, C.; Wambolt, P. Development of a Meteorological Sensor Suite for Atmospheric Boundary Layer Measurement Using a Small Multirotor Unmanned Aerial System. In Proceedings of the International Society for Atmospheric Research Using Remotely-Piloted Aircraft World Congress, Lugo, Spain, 15–19 July 2019. [Google Scholar]
- Adkins, K.; Olds, J.; Ellis, C. Development, testing and use of an instrumented unmanned aerial system to investigate changes to the near-surface meteorology within a wind farm. In Proceedings of the Association for Unmanned Vehicle Systems International Xponential 2017 AUVSI, Dallas, TX, USA, 8–11 May 2017. [Google Scholar]
- Caputo, A.; Oreo, A.; Alterizio, V.; Adkins, K. Development of a Meteorologically Instrumented Small Transition Unmanned Aerial System for Urban Boundary Layer Investigations. In Embry-Riddle Aeronautical University Discovery Day; Embry-Riddle Aeronautical University: Daytona Beach, FL, USA, 2020. [Google Scholar]
- Oreo, A.; Swinford, C.; Adkins, K. Development of a Telemetry System for a Meteorologically Instrumented Small Unmanned Aerial System. In Embry-Riddle Aeronautical University Discovery Day; Embry-Riddle Aeronautical University: Daytona Beach, FL, USA, 2019. [Google Scholar]
- Swinford, C.; Oreo, A.; Adkins, K. Development of a Three-Dimensional Wind Measurement Sensor Hosted on a Small Unmanned Aerial System. In Embry-Riddle Aeronautical University Discovery Day; Embry-Riddle Aeronautical University: Daytona Beach, FL, USA, 2020. [Google Scholar]




© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Adkins, K.; Wambolt, P.; Sescu, A.; Swinford, C.; Macchiarella, N.D. Observational Practices for Urban Microclimates Using Meteorologically Instrumented Unmanned Aircraft Systems. Atmosphere 2020, 11, 1008. https://doi.org/10.3390/atmos11091008
Adkins K, Wambolt P, Sescu A, Swinford C, Macchiarella ND. Observational Practices for Urban Microclimates Using Meteorologically Instrumented Unmanned Aircraft Systems. Atmosphere. 2020; 11(9):1008. https://doi.org/10.3390/atmos11091008
Chicago/Turabian StyleAdkins, Kevin, Peter Wambolt, Adrian Sescu, Christopher Swinford, and Nickolas D. Macchiarella. 2020. "Observational Practices for Urban Microclimates Using Meteorologically Instrumented Unmanned Aircraft Systems" Atmosphere 11, no. 9: 1008. https://doi.org/10.3390/atmos11091008