Refinements to Data Acquired by 2-Dimensional Video Disdrometers


Abstract
:1. Introduction
2. Materials and Methods
2.1. The 2-Dimensional Video Disdrometer
2.2. The Data Anomaly
- Rather than grouping into 10 pixel domains, the new algorithm looks at each pixel along both camera fields of view.
- Rather than assigning a droplet position to be at its detected center, the new algorithm looks at every pixel covered by every recorded hydrometeor in the “batch”.
- The old algorithm used the ith through the (i + 1000)th particle detection to determine whether the ith particle was anomalous; the new algorithm uses the (i − 500th) through (i + 500th) particle detection, helping to localize anomalies more accurately in time.
- The old algorithm had no way of handling the last 1000 drops in a dataset; the new algorithm modifies the algorithm slightly for the first 500 and last 500 drops of a sample; although anomaly detection is arguably not ideal for these drops, it is possible to flag drops throughout an entire day’s accumulation so long as it lasts at least 1000 drops.
- Anomalies resulting in underdetection due to an obstacle on the optics during the hourly renormalization of video levels typically have long duration and involve a more subtle detection than the spurious drop-creating anomalies. Because of this, a larger window of 10,000 drops are used for detection and confirmation of the under-detection phenomena. A similar adjustment to centering the window on the drop in question (instead of just looking at the following 10,000 drops) is also applied to the underdetection algorithm.
2.3. Calculation of the Effective Area
2.3.1. Computation of the Effective Area by the Included Software
- 1
- All pixels within the field of view are treated as having the same area.
- 2
- The edges of the sample area are not accounted for perfectly and, although an exact correction is not possible for pixelated data, an improvement can be made.
- 3
- Reductions in effective measurement area during the previously described anomaly are not provided.
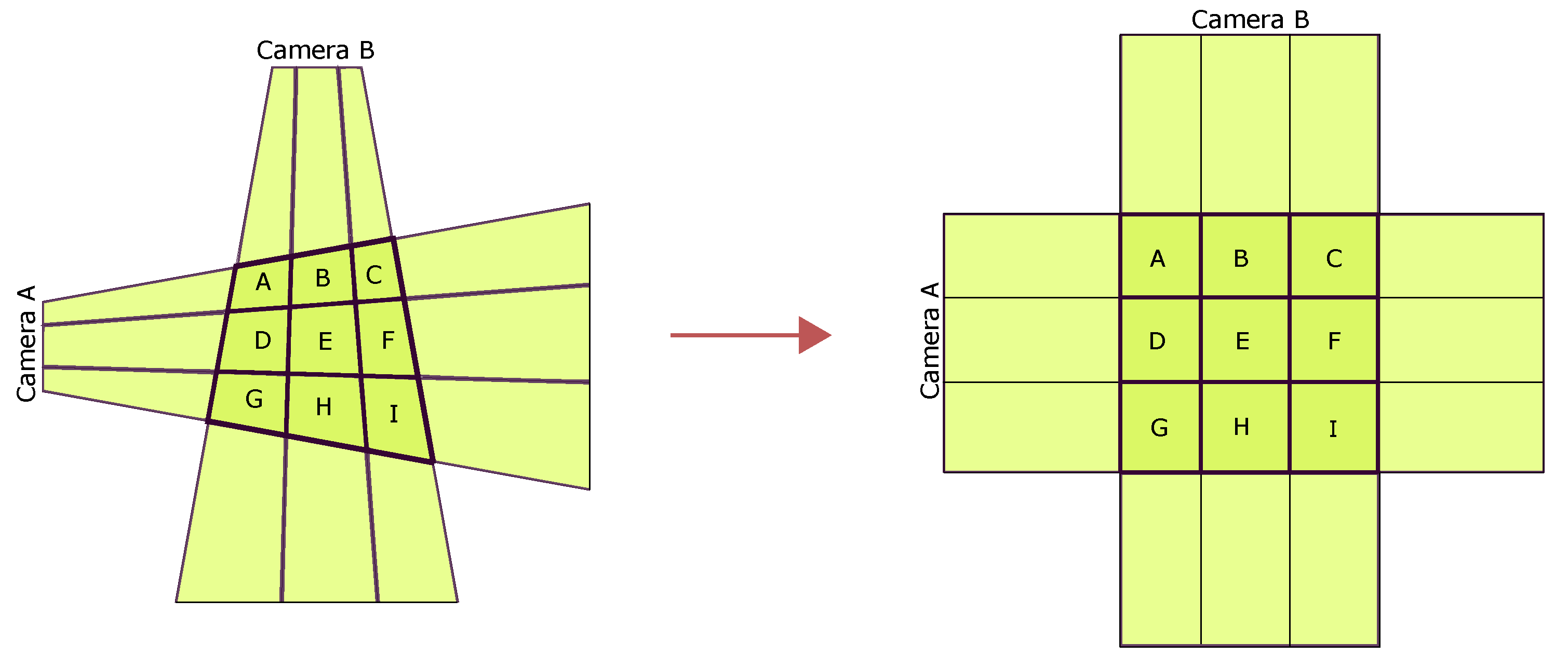
2.3.2. Areas of 2DVD Pixels
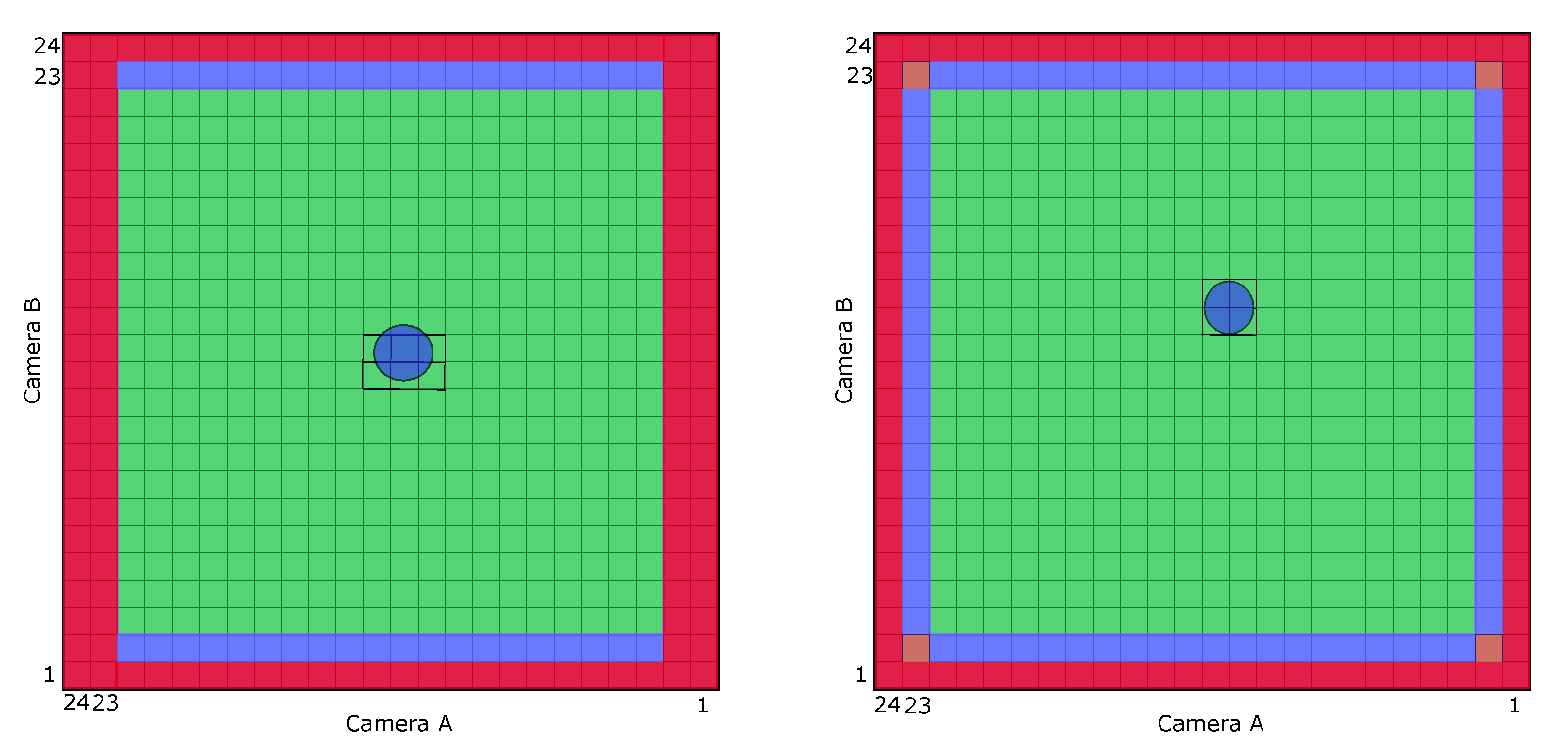
2.3.3. Accounting for the Boundary
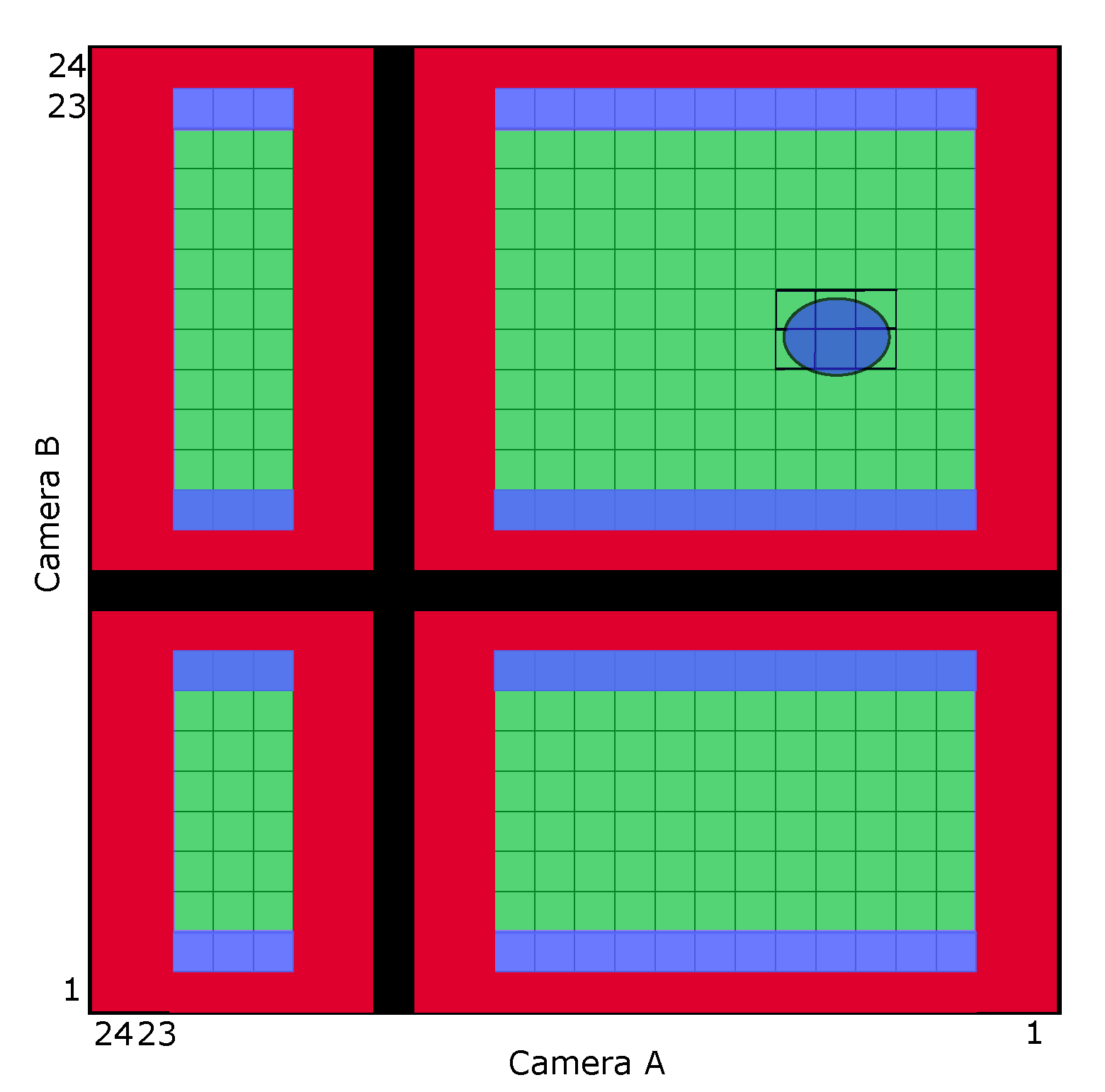
2.3.4. Removal of Insensitive Part of the Field of View during the Anomaly
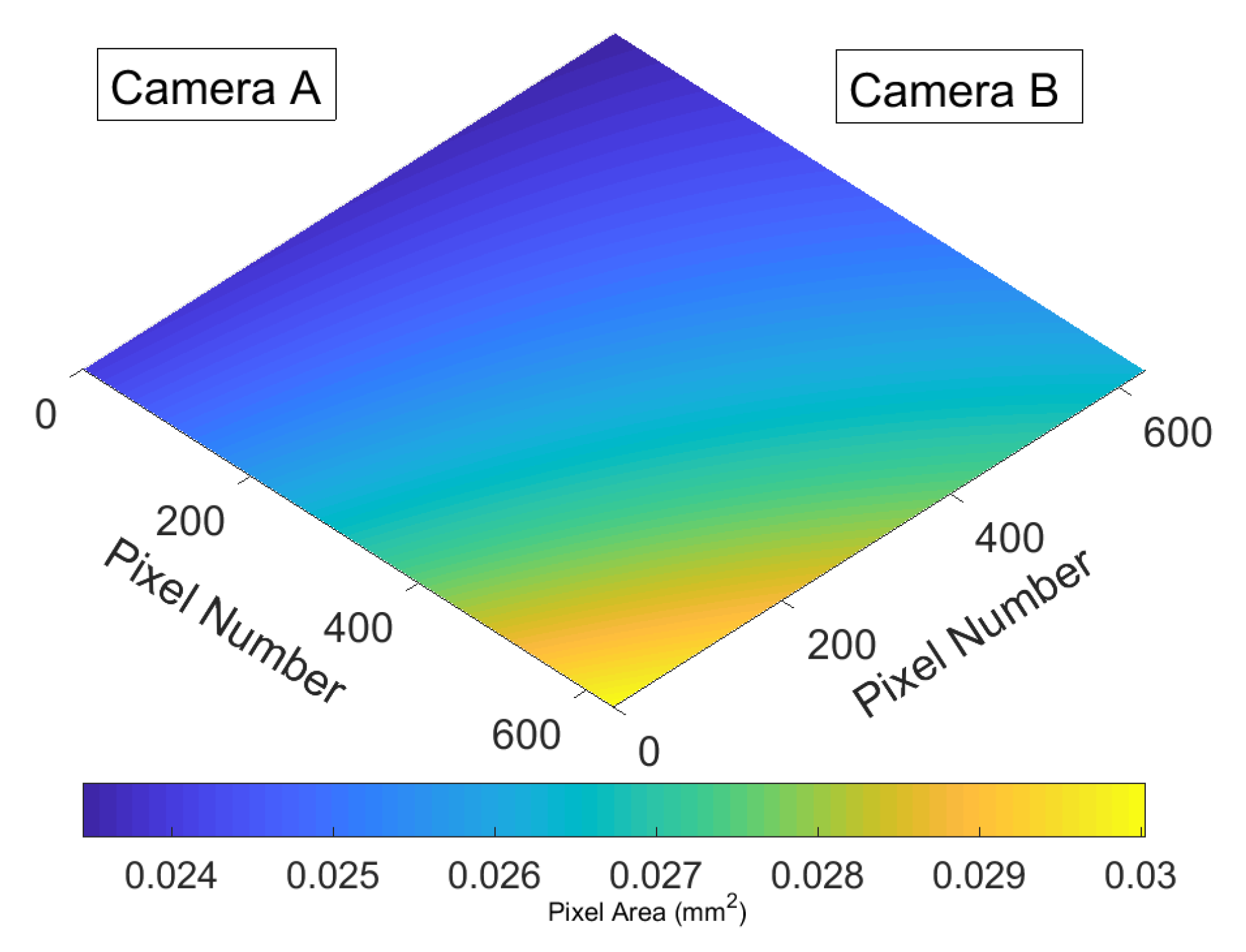
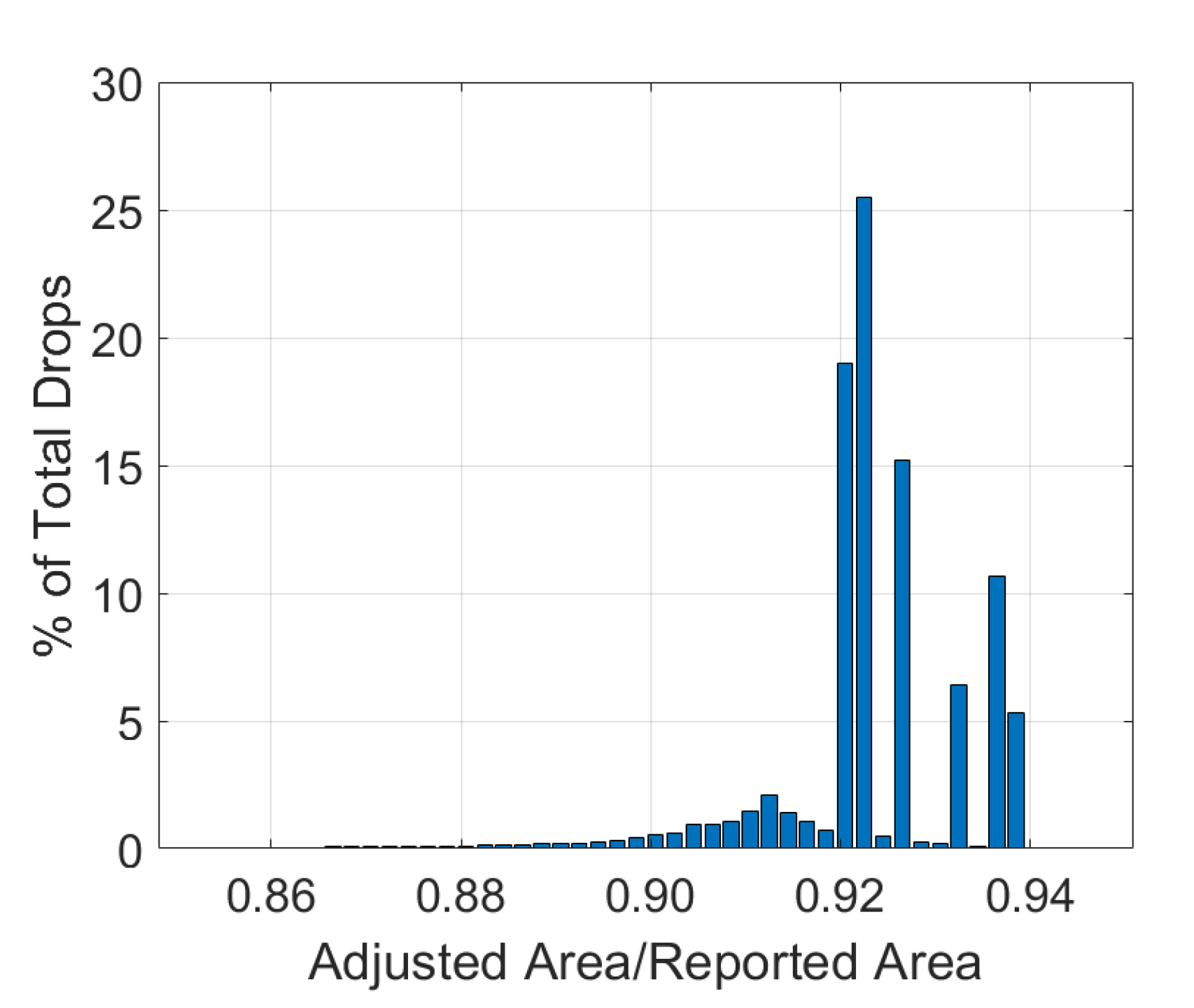
2.3.5. Mean Pixel Size
2.3.6. The New Effective Area Algorithm
3. Results
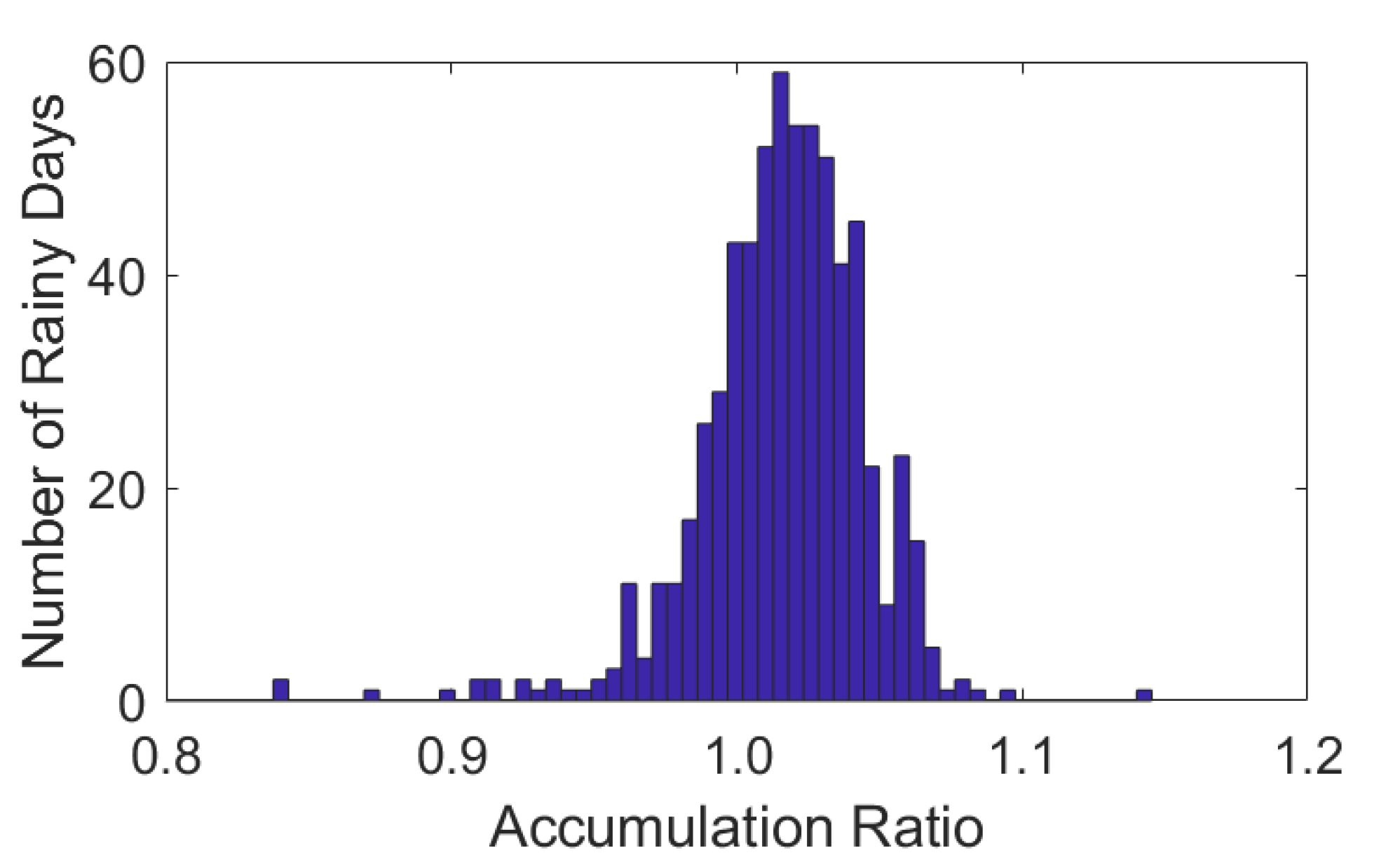
3.1. Ensemble Results
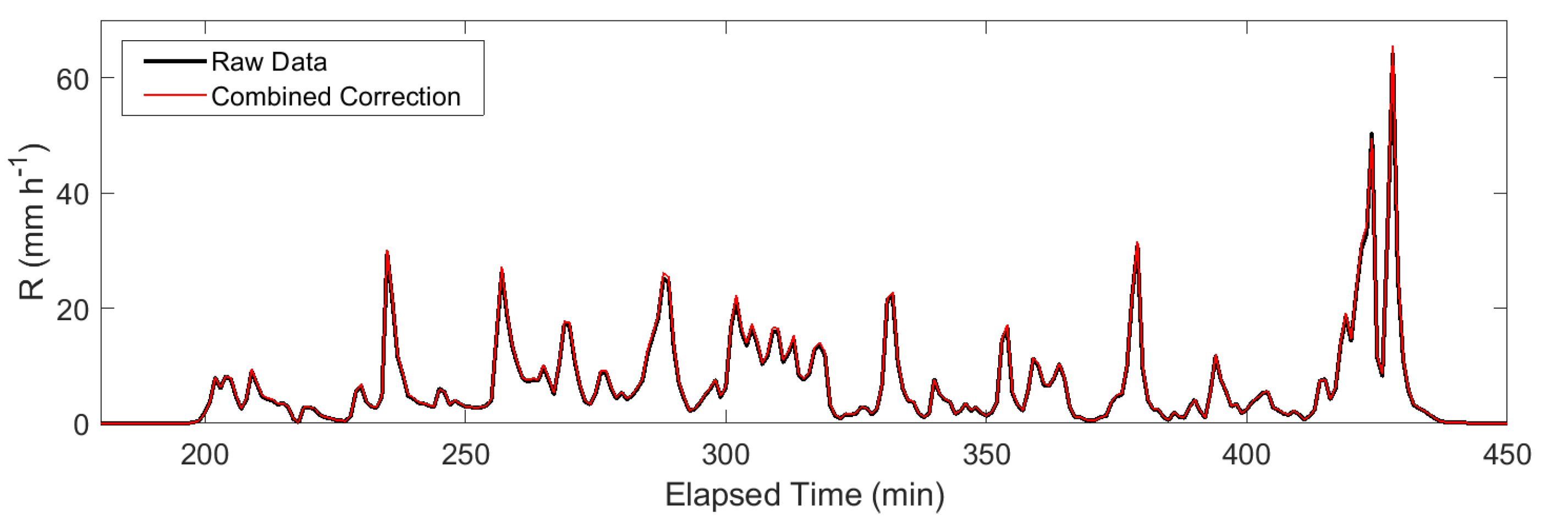
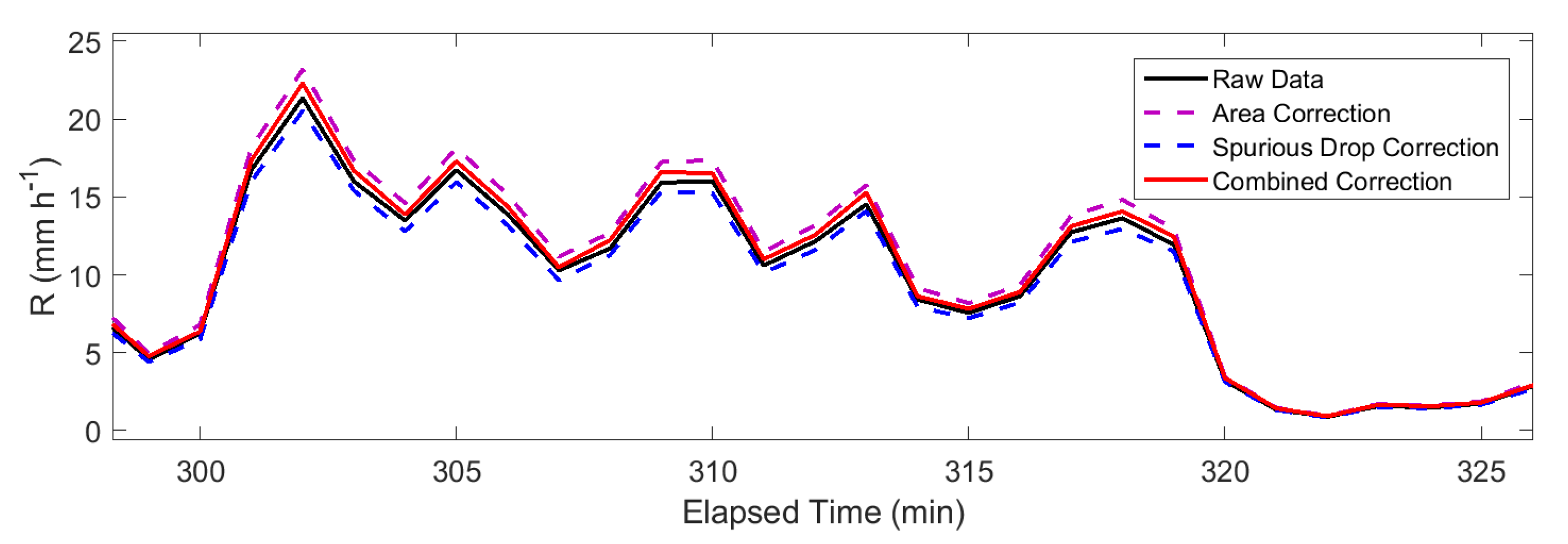
3.2. Event Analysis
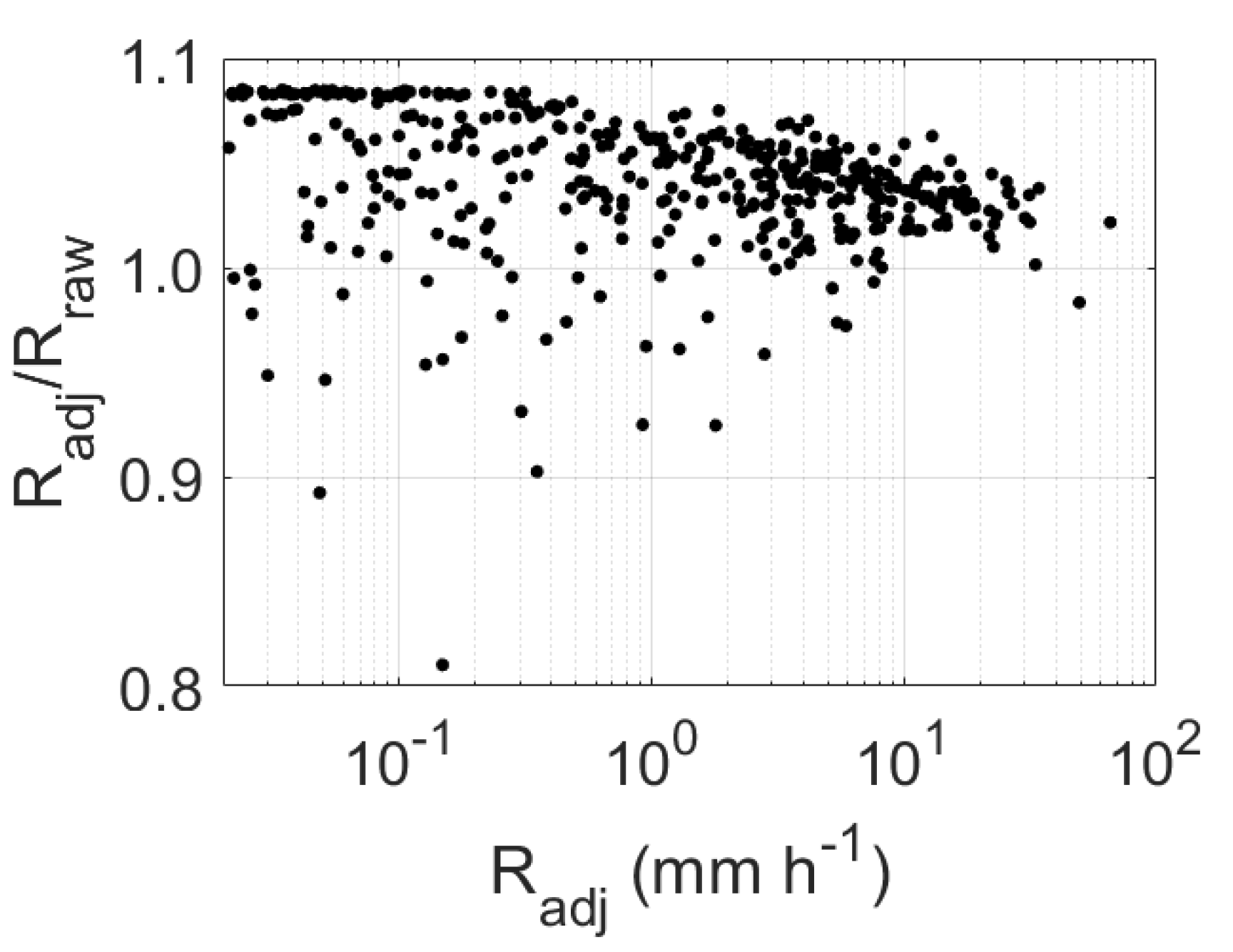
3.3. Individual Drops
4. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Details Regarding the Improved Algorithm to Detect and Flag Measured Drops Impacted by the Anomaly
- flag1. This is set to “1” if the drop in question occurred during a time interval where there was an over-abundance of drops along at least 1 pixel in the field of view. If no such overabundance existed during the detection of this drop, a “0” is assigned.
- flag2. This is set to “1” if the drop in question occurred during a time interval where there was a lack of drops along at least 1 pixel in the field of view (presumably due to an optical obstacle present during the hourly video-level re-calibration). If no such deficiency existed during the detection of this drop, a “0” is assigned.
- extrapart. This is set to “1” if flag1 = 1 AND the particle in question was detected in a region of the field of view that intersects with the region affected by the anomaly. If both of these criteria are not met, extrapart is set to 0.
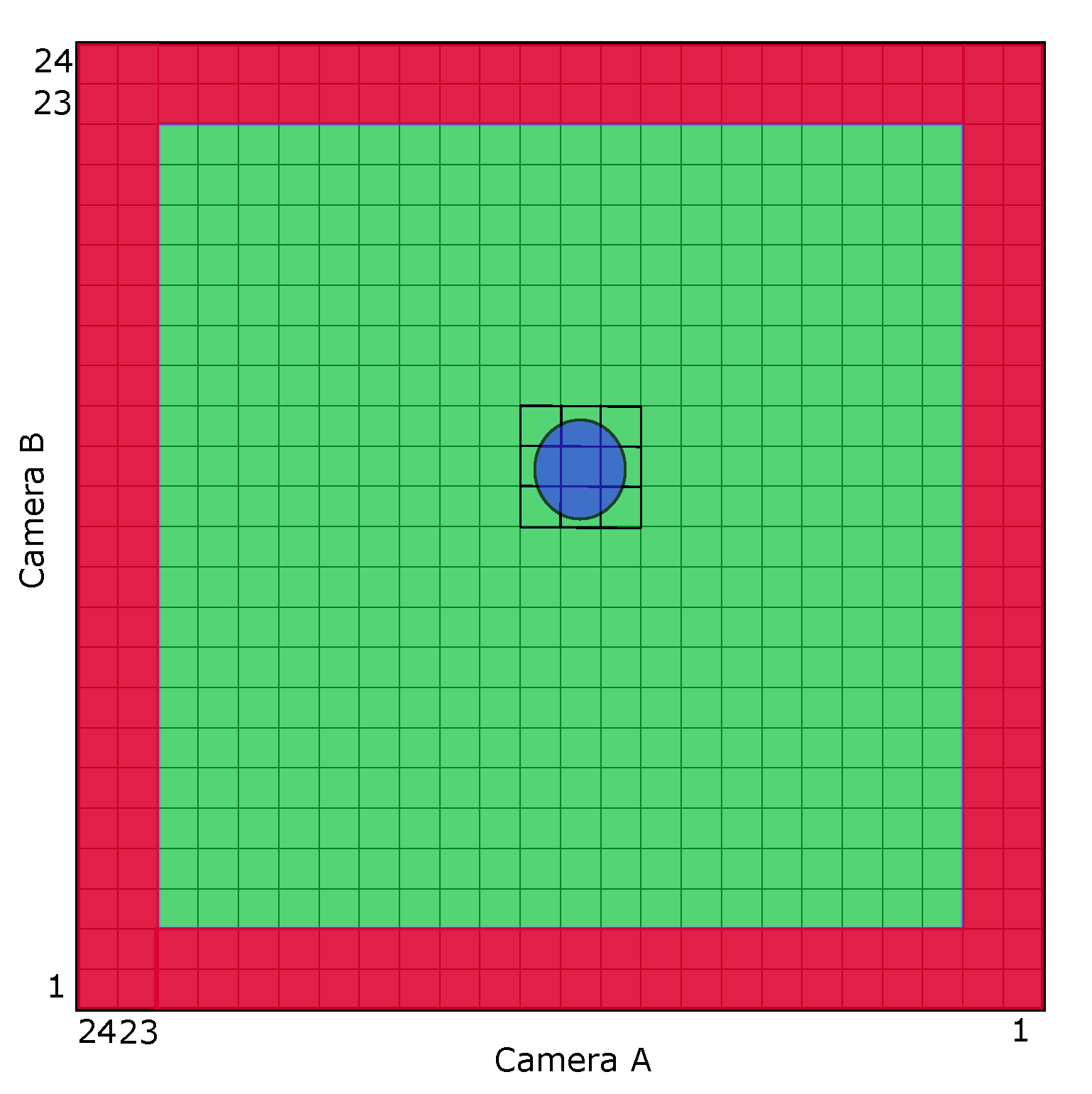
- alistlow. This carries no information if flag2 = 0, but if flag2 = 1 it identifies the pixel numbers in camera A (if any) where drop observations appear to be anomalously missing; this helps to identify areas like the black regions in Figure 6.
- alisthi. This carries no information if flag1 = 0, but if flag1 = 1 it identifies the pixel numbers in camera A (if any) where drop observations appear to be anomalously elevated; this also helps to identify areas like the black regions in Figure 6.
- blistlow and blisthi–natural extensions of alistlow and alisthi for camera B.
Appendix B. Calculation of the Area of Each Pixel
- 1
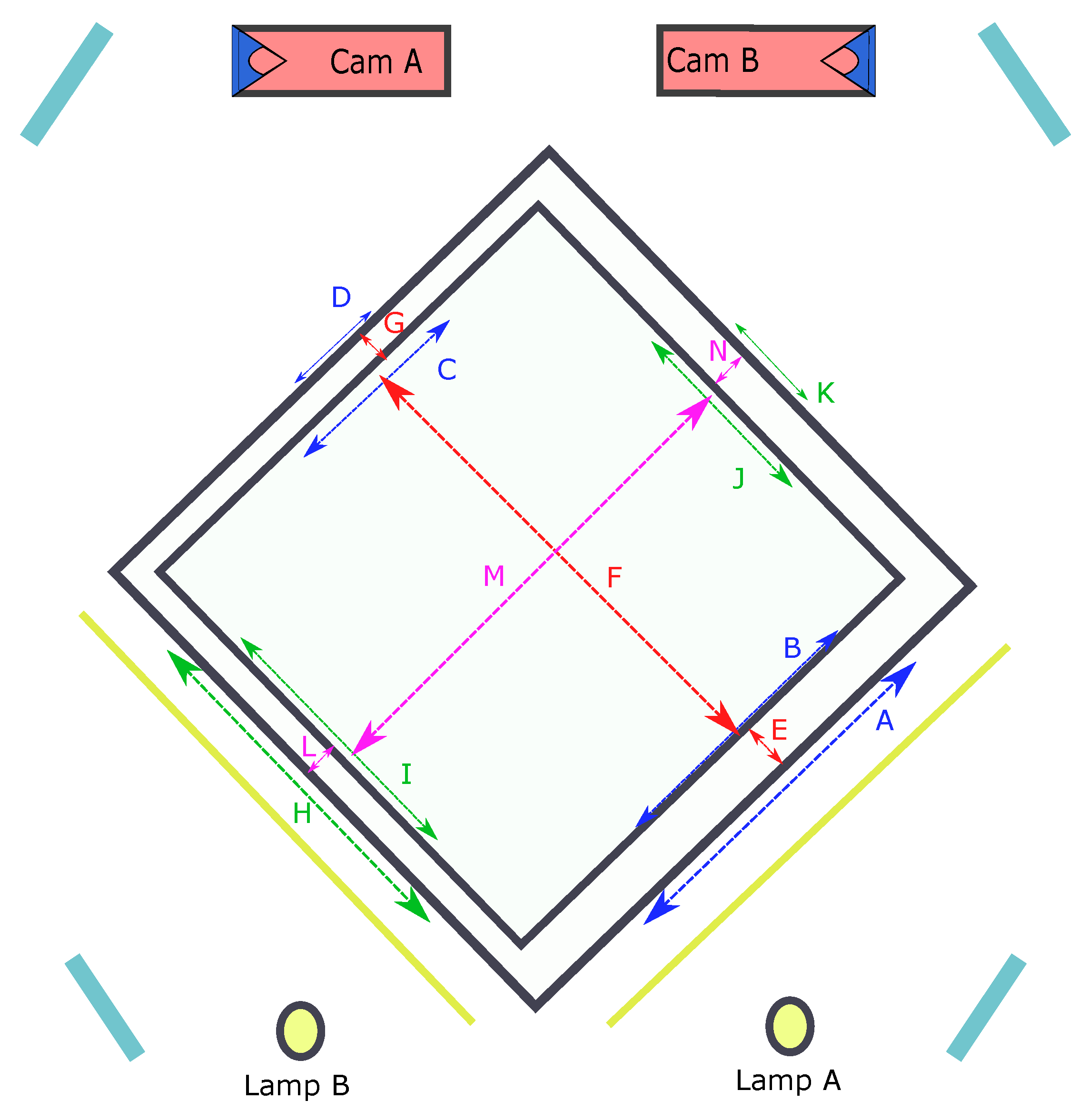
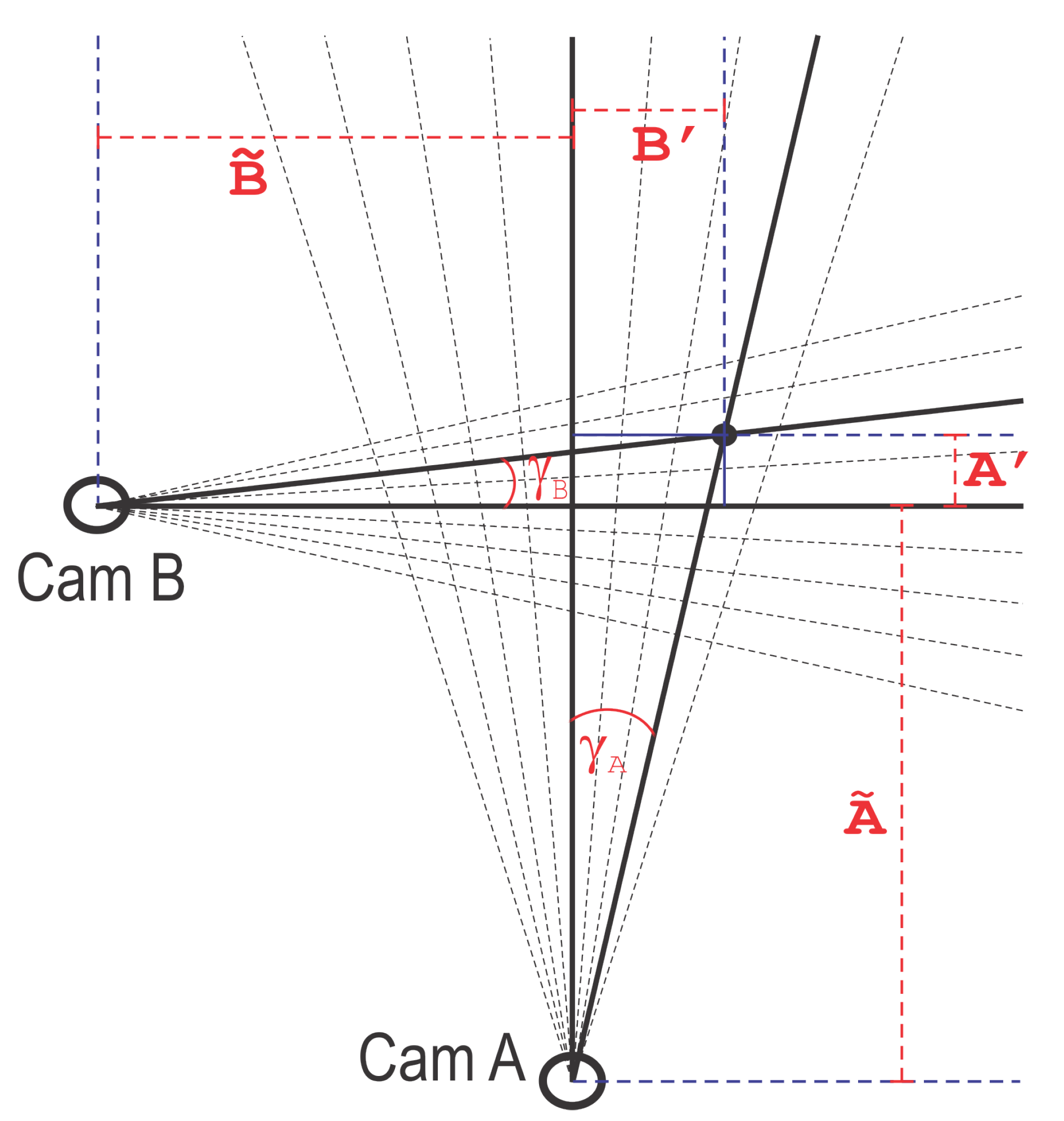
- First, we define a coordinate system where the center of the field of view is set as the origin (see Figure A1). Then, using the data from Table 1, a fit is made relating the width of the field of view to the distance from the lines marked D and K on Figure 2. The light sheet linearly narrows from A to D (and H to K). Extending these lines to the focal point allows us to define the distance between the camera focal point and the center of the field of view; we label these distances as and , respectively.Using basic trigonometry, the triangles that are formed by connecting these focal points to the width measurements (e.g., A, B, C, and D) give four triangles each with very similar angles near the vertex at . We then divide that angle equally among the 632 pixels in the camera’s field of view. This angle (that we call and for cameras A and B, respectively) corresponds to the angle at the focal point associated with a single pixel width as it propagates back towards the illumination source.
- 2
- From the information and coordinate system implied previously (with the origin at the center of the field of view), the coordinates and of each of the four corners of a given pixel are determined from the following expressions (derived again from a geometrical analysis of the layout):where and are determined to be the multiples of and necessary to point to the appropriate corners of the pixel in question. For example, and would be used to calculate the co-ordinates of a pixel corner that is m pixels removed from the middle of the field of view of camera A and n pixels removed from the middle of the field of view of camera B (m and n are integers in the range between −316 and +316, depending on the pixel in question).
- 3
- The coordinates of the four corners of each pixel are used to calculate the area of the resulting irregular quadrilateral. Each quadrilateral can be split into 2 scalene triangles. Let the four sides of the quadrilateral be labeled , , , and and the diagonal corresponding to the line connecting the furthest combined distance from the cameras to the closest combined distance from the cameras be labeled z. From these five distances, the total quadrilateral area can be computed via Herron’s formula aswhere and are defined as:

Appendix C. Further Considerations Related to Sensing Area

References
- Uijlenhoet, R.; Stricker, J. A consistent rainfall parameterization based on the exponential raindrop size distribution. J. Hydrol. 1999, 218. [Google Scholar] [CrossRef]
- Gage, K.; Williams, C.; Clark, W.; Johnston, P.; Carter, D. Profiler contributions to tropical rainfall measuring mission (TRMM) ground validation field campaigns. J. Atmos. Ocean. Technol. 2002, 19, 843–863. [Google Scholar] [CrossRef]
- Datta, S.; Jones, W.; Roy, B.; Tokay, A. Spatial variability of surface rainfall as observed from TRMM field campaign data. J. Appl. Meteorol. 2003, 42, 598–610. [Google Scholar] [CrossRef] [Green Version]
- Miriovsky, B.; Bradley, A.; Eichinger, W.; Krajewski, W.; Kruger, A.; Nelson, B.; Creutin, J.D.; Lapetite, J.M.; Lee, G.; Zawadzki, I.; et al. An experimental study of small-scale variability of radar reflectivity using disdrometer observations. J. Appl. Meteorol. 2004, 43, 106–118. [Google Scholar] [CrossRef]
- Krajewski, W.; Kruger, A.; Caracciolo, C.; Golé, P.; Barthes, L.; Creutin, J.D.; Delahaye, J.Y.; Nikolopoulos, E.; Ogden, F.; Vinson, J.P. DEVEX-disdrometer evaluation experiment: Basic results and implications for hydrologic studies. Adv. Water Resour. 2006, 29, 807–814. [Google Scholar] [CrossRef]
- Jensen, M.; Petersen, W.; Bansemer, A.; Bharadwaj, N.; Carey, L.; Cecil, D.; Collis, S.; DelGenio, A.; Dolan, B.; Gerlach, J.; et al. The midlatitude continental convective clouds experiment (MC3E). Bull. Am. Meteorol. Soc. 2016, 97, 1667–1686. [Google Scholar] [CrossRef]
- Roberto, N.; Adirosi, E.; Baldini, L.; Casella, D.; Dietrich, S.; Gatlin, P.; Panegrossi, G.; Petracca, M.; Sanò, P.; Tokay, A. Multi-sensor analysis of convective activity in central Italy during the HyMeX SOP 1.1. Atmos. Meas. Tech. 2016, 9, 535–552. [Google Scholar] [CrossRef] [Green Version]
- Kathiravelu, G.; Lucke, T.; Nichols, P. Rain Drop Measurement Technologies: A Review. Water 2016, 8, 29. [Google Scholar] [CrossRef] [Green Version]
- Kruger, A.; Krajewski, W. Two-Dimensional Video Disdrometer: A Description. J. Atmos. Ocean. Technol. 2002, 19, 602–617. [Google Scholar] [CrossRef]
- Schönhuber, M.; Lammer, G.; Randeu, W. The 2D video disdrometer. In Precipitation: Advances in Measurement, Estimation and Prediction; Michaelides, S., Ed.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 3–31. [Google Scholar]
- Gage, K.; Williams, C.; Johnston, P.; Ecklund, W.; Cifelli, R.; Tokay, A.; Carter, D. Doppler radar profilers as calibration tools for scanning radars. J. Appl. Meteorol. 2000, 39, 2209–2222. [Google Scholar] [CrossRef]
- Williams, C.; Kruger, A.; Gage, K.; Tokay, A.; Cifelli, R.; Krajewski, W.; Kummerow, C. Comparison of simultaneous rain drop size distributions estimated from two surface disdrometers and a UHF profiler. Geophys. Res. Lett. 2000, 27, 1763–1766. [Google Scholar] [CrossRef] [Green Version]
- Tokay, A.; Kruger, A.; Krajewski, W. Comparison of drop size distribution measurements by impact and optical disdrometers. Adv. Geosci. 2001, 30, 3–9. [Google Scholar] [CrossRef]
- Bringi, V.; Chandrasekar, V.; Hubbert, J.; Gorgucci, E.; Randeu, W.; Schönhuber, M. Raindrop size distribution in different climatic regions from disdrometer and dual-polarized radar analysis. J. Atmos. Sci. 2003, 60, 354–365. [Google Scholar] [CrossRef]
- Thurai, M.; Bringi, V. Drop axis ratios from a 2D video disdrometer. J. Atmos. Ocean. Technol. 2005, 22, 966–978. [Google Scholar] [CrossRef]
- Cao, Q.; Zhang, G.; Brandes, E.; Schuur, T.; Ryzhkov, A.; Ikeda, K. Analysis of video disdrometer and polarimetric radar data to characterize rain microphysics in Oklahoma. J. Appl. Meteorol. Climatol. 2008, 47, 2238–2255. [Google Scholar] [CrossRef] [Green Version]
- Cao, Q.; Zhang, G. Errors in estimating raindrop size distribution parameters employing disdrometer and simulated raindrop spectra. J. Appl. Meteorol. Climatol. 2009, 48, 406–425. [Google Scholar] [CrossRef]
- Yoshikawa, E.; Kida, S.; Yoshida, S.; Morimoto, T.; Ushio, T.; Kawasaki, Z. Vertical structure of raindrop size distribution in lower atmospheric boundary layer. Geophys. Res. Lett. 2010, 37, L20802. [Google Scholar] [CrossRef]
- Thurai, M.; Petersen, W.; Tokay, A.; Shultz, C.; Gatlin, P. Drop size distribution comparisons between Parsivel and 2-D video disdrometers. Adv. Geosci. 2011, 30, 3–9. [Google Scholar] [CrossRef] [Green Version]
- Marzuki; Randeu, W.; Kozu, T.; Simonmai, T.; Hashiguchi, H.; Schönhuber, M. Raindrop axis ratios, fall velocities and size distribution over Sumatra from 2D-Video Disdrometer measurement. Atmos. Res. 2013, 119, 23–37. [Google Scholar] [CrossRef]
- Tokay, A.; Petersen, W.; Gatlin, P.; Wingo, M. Comparison of raindrop size distribution measurements by collocated disdrometers. J. Atmos. Ocean. Technol. 2013, 30, 1672–1690. [Google Scholar] [CrossRef]
- Adirosi, E.; Gorgucci, E.; Baldini, L.; Tokay, A. Evaluation of Gamma raindrop size distribution assumption through comparison of rain rates of measured and radar-equivalent Gamma DSD. J. Appl. Meteorol. Climatol. 2014, 53, 1618–1635. [Google Scholar] [CrossRef]
- Ferretti, G.; Pichelli, E.; Gentile, S.; Maiello, I.; Cimini, D.; Davolio, S.; Miglietta, M.; Panegrossi, G.; Baldini, L.; Pasi, F.; et al. Overview of the first HyMeX special observation period over Italy: Observations and model results. Hydrol. Earth Syst. Sci. 2014, 18, 1953–1977. [Google Scholar] [CrossRef] [Green Version]
- Larsen, M.; Kostinski, A.; Jameson, A. Further evidence for super-terminal raindrops. Geophys. Res. Lett. 2014, 41, 6914–6918. [Google Scholar] [CrossRef] [Green Version]
- Gatlin, P.; Thurai, M.; Bringi, V.; Petersen, W.; Wolff, D.; Tokay, A.; Carey, L.; Wingo, M. Searching for large raindrops: A global summary of two-dimensional video disdrometer observations. J. Appl. Meteorol. Climatol. 2015, 54, 1069–1088. [Google Scholar] [CrossRef]
- Gires, A.; Tchiguirinskaia, I.; Schertzer, D.; Berne, A. 2DVD Data Revisited: Multifractal insights into cuts of the spatiotemporal rainfall process. J. Hydrometeorol. 2015, 16, 548–562. [Google Scholar] [CrossRef] [Green Version]
- Raupach, T.; Berne, A. Correction of raindrop size distributions measured by Parsivel disdrometers, using a two-dimensional video disdrometer as a reference. Atmos. Meas. Tech. 2015, 8. [Google Scholar] [CrossRef] [Green Version]
- Adirosi, E.; Volpi, E.; Lombardo, F.; Baldini, L. Raindrop size distribution: Fitting performance of common theoretical models. Adv. Water Resour. 2016, 96, 290–305. [Google Scholar] [CrossRef]
- Adirosi, E.; Baldini, L.; Roberto, N.; Gatlin, P.; Tokay, A. Improvement of vertical profiles of raindrop size distribution from micro rain radar using 2D video disdrometer measurements. Atmos. Res. 2016, 169, 404–415. [Google Scholar] [CrossRef]
- Jameson, A.; Larsen, M.; Kostinski, A. An example of persistent microstructure in a long rain event. J. Hydrometeorol. 2016, 17, 1661–1673. [Google Scholar] [CrossRef]
- Jameson, A.; Larsen, M. Estimates of the statistical two-dimensional spatial structure in rain over a small network of disdromters. Meteorol. Atmos. Phys. 2016, 128, 401–413. [Google Scholar] [CrossRef] [Green Version]
- Jameson, A.; Larsen, M. The variability of rainfall rate as a function of area. J. Geophys. Res. Atmos. 2016, 121. [Google Scholar] [CrossRef] [Green Version]
- Larsen, M.; O’Dell, K. Sampling variability effects in drop-resolving disdrometer observations. J. Geophys. Res. Atmos. 2016, 121. [Google Scholar] [CrossRef]
- Thurai, M.; Gatlin, P.; Bringi, V. Separating stratiform and convective rain types based on the drop size distribution characteristics using 2D video disdrometer data. Atmos. Res. 2016, 169, 416–423. [Google Scholar] [CrossRef]
- Park, S.G.; Kim, H.L.; Ham, Y.W.; Jung, S.H. Comparative evaluation of the OTT PARSIVEL2 using a collocated two-dimensional video disdrometer. J. Atmos. Ocean. Technol. 2017, 34, 2059–2082. [Google Scholar] [CrossRef]
- Tokay, A.; D’Adderio, L.; Porcù, F.; Wolff, D.; Petersen, W. A field study of footprint-scale variability of raindrop size distribution. J. Hydrometeorol. 2017, 18, 3165–3179. [Google Scholar] [CrossRef]
- Wen, G.; Xiao, H.; Yang, H.; Bi, Y.; Xu, W. Characteristics of summer and winter precipitation over northern China. Atmos. Res. 2017, 197, 390–406. [Google Scholar] [CrossRef]
- Wen, L.; Zhao, K.; Zhang, G.; Liu, S.; Chen, G. Impacts of instrument limitations on estimated raindrop size distribution, radar parameters, and model microphysis during Mei-Yu season in east China. J. Atmos. Ocean. Technol. 2017, 34, 1021–1037. [Google Scholar] [CrossRef]
- Adirosi, E.; Roberto, N.; Montopoli, M.; Gorgucci, E.; Baldini, L. Influence of disdrometer type on weather radar algorithms from measured DSD: Application to Italian Climatology. Atmosphere 2018, 9, 360. [Google Scholar] [CrossRef] [Green Version]
- Bringi, V.; Thurai, M.; Baumgardner, D. Raindrop fall velocities from an optical array probe and 2-D video disdrometer. Atmos. Meas. Tech. 2018, 11, 1377–1384. [Google Scholar] [CrossRef] [Green Version]
- D’Adderio, L.; Porcù, F.; Tokay, A. Evolution of drop size distribution in natural rain. Atmos. Res. 2018, 200, 70–76. [Google Scholar] [CrossRef]
- Larsen, M.; Schönhuber, M. Identification and characterization of an anomaly in 2-dimensional video disdrometer data. Atmosphere 2018, 9, 315. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Wan, Q.; Wang, H.; Xiao, H.; Zhang, Y.; Zheng, T.; Feng, L. Raindrop size distribution parameters retrieved from Guangzhou S-band polarimetric radar observations. J. Meteorol. Res. 2018, 32, 571–583. [Google Scholar] [CrossRef]
- Manić, S.; Thurai, M.; Bringi, V.; Notarosš, B. Scattering calculations for asymmetric raindrops during a line convection event: Comaprison with Radar measurements. J. Atmos. Ocean. Technol. 2018, 35, 1169–1180. [Google Scholar] [CrossRef]
- Thurai, M.; Bringi, V. Application of the generalized gamma model to represent the full rain drop size distribution spectra. J. Appl. Meteorol. Climatol. 2018, 57, 1197–1210. [Google Scholar] [CrossRef]
- Wen, L.; Zhao, K.; Chen, G.; Wang, M.; Zhou, B.; Huang, H.; Hu, D.; Lee, W.C.; Hu, H. Drop size distribution characteristics of seven typhoons in China. J. Geophys. Res. Atmos. 2018, 123, 6529–6548. [Google Scholar] [CrossRef]
- Liu, X.; He, B.; Zhao, S.; Hu, S.; Liu, L. Comparative measurement of rainfall with a precipitation micro-physical characteristics sensor, a 2D video disdrometer, an OTT PARSIVEL disdrometer, and a rain gauge. Atmos. Res. 2019, 229, 100–114. [Google Scholar] [CrossRef]
- Mahale, V.; Guifu, Z.; Ming, X.; Jidong, G.; Reeves, H. Variational retrieval of rain microphysics and related parameters from polarimetric radar data with a parameterized operator. J. Atmos. Ocean. Technol. 2019, 36, 2483–2500. [Google Scholar] [CrossRef]
- Raupach, T.; Thurai, M.; Bringi, V.; Berne, A. Reconstructing the drizzle mode of the raindrop size distribution using double-moment normalization. J. Appl. Meteorol. Climatol. 2019, 58, 145–164. [Google Scholar] [CrossRef]
- Thurai, M.; Bringi, V.; Gatlin, P.; Petersen, W.; Wingo, M. Measurements and modeling of the full rain drop size distribution. Atmosphere 2019, 10, 39. [Google Scholar] [CrossRef] [Green Version]
- Conrick, R.; Zagrodnik, J.; Mass, C. Dual-polarization radar retrievals of coastal pacific northwest raindrop size distribution parameters using random forest regression. J. Atmos. Ocean. Technol. 2020, 37, 229–242. [Google Scholar] [CrossRef]
- Das, S.; Simon, S.; Kolte, Y.; Krishna, U.; Deshpande, S.; Hazra, A. Investigation of raindrops fall velocity during different monsoon seasons over the Western Ghats, India. Earth Space Sci. 2020, 7. [Google Scholar] [CrossRef] [Green Version]
- Luo, L.; Xiao, H.; Yang, H.; Chen, H.; Guo, J.; Sun, Y.; Feng, L. Raindrop size distribution and microphysical characteristics of a great rainstorm in 2016 in Beijing, China. Atmos. Res. 2020, 239, 104895. [Google Scholar] [CrossRef]
- Thurai, M.; Steger, S.; Teschl, F.; Schönhuber, M. Analysis of raindrop shapes and scattering calculations: The outer rain bands of tropical depression Nate. Atmosphere 2020, 11, 114. [Google Scholar] [CrossRef] [Green Version]
- Tokay, A.; D’Adderio, L.; Marks, D.; Pippitt, J.; Wolff, D.; Patersen, W. Comparison of raindrop size distribution between NASA’s S-Band Polarimetric Radar and Two-Dimensional Video Disdrometers. J. Appl. Meteorol. Climatol. 2020, 59, 517–533. [Google Scholar] [CrossRef]
- Tokay, A.; D’Adderio, L.; Wolff, D.; Petersen, W. Development and evaluation of the raindrop size distribution parameters for the NASA Global Precipitation Measurement Mission ground validation program. J. Atmos. Ocean. Technol. 2020, 37, 115–128. [Google Scholar] [CrossRef]
- Zhou, L.; Dong, X.; Fu, Z.; Wang, B.; Leng, L.; Xi, B.; Cui, C. Vertical distributions of raindrops and Z-R relationships using microrain radar and 2-D-Video Distrometer Measurements During the Integrative Monsoon Frontal Rainfall Experiment (IMFRE). J. Geophys. Res. Atmos. 2020, 125, e2019JD031108. [Google Scholar] [CrossRef] [Green Version]
- Löffler-Mang, M.; Joss, J. An optical disdrometer for measuring size and velocity of hydrometeors. J. Atmos. Ocean. Technol. 2000, 17, 130–139. [Google Scholar] [CrossRef]
- Battaglie, A.; Rustemeier, E.; Tokay, A.; Blahak, U.; Simmer, C. PARSIVEL snow observations: A cricital assessment. J. Atmos. Ocean. Technol. 2010, 27, 333–344. [Google Scholar] [CrossRef]
- Nespor, V.; Krajewski, W.; Kruger, A. Wind-induced error of raindrop size distribution measurement using a two-dimensional video disdrometer. J. Atmos. Ocean. Technol. 2000, 17, 1483–1492. [Google Scholar] [CrossRef]
- Schönhuber, M.; Lammer, G.; Randeu, W. One decade of imaging precipitation measurement by 2D-video-distrometer. Adv. Geosci. 2007, 10, 85–90. [Google Scholar] [CrossRef] [Green Version]
- Angulo-Martinez, M.; Begueria, S.; Latorre, B.; Fernández-Raga, M. Comparison of precipitation measurements by OTT Parsivel2 and Thies LPM optical disdrometers. Hydrol. Earth Syst. Sci. 2018, 22, 2811–2837. [Google Scholar] [CrossRef] [Green Version]
- Frasson, R.; da Cunha, L.; Krajewski, W. Assessment of the Thies optical disdrometer performance. Atmos. Res. 2011, 101, 237–255. [Google Scholar] [CrossRef]
- Liu, X.; Gao, T.; Liu, L. A comparison of rainfall measurements from multiple instruments. Atmos. Meas. Tech. 2013, 6, 1585–1595. [Google Scholar] [CrossRef] [Green Version]
- Das, S.; Konwar, M.; Chakravarty, K.; Deshpande, S. Raindrop size distribution of different cloud types over the Western Ghats using simultaneous measurements from Micro-Rain Radar and disdrometer. Atmos. Res. 2017, 186, 72–82. [Google Scholar] [CrossRef]
- Wen, L.; Zhao, K.; Zhang, G.; Xue, M.; Zhou, B.; Liu, S.; Chen, X. Statistical characteristics of raindrop size distributions observed in East China during the Asian summer monsoon season usign 2-D video disdrometer and Micro Rain Radar data. J. Geophys. Res. Atmos. 2016, 121, 2265–2282. [Google Scholar] [CrossRef] [Green Version]
- Chang, W.; Lee, G.; Jou, B.D.; Lee, W.C.; Lin, P.L.; You, C.K. Uncertainty in measured raindrop size distributions from four types of collocated instruments. Remote Sens. 2020, 12, 1167. [Google Scholar] [CrossRef] [Green Version]
- Jameson, A.; Larsen, M.; Kostinski, A. Disdrometer network observations of finescale spatial-temporal clustering in rain. J. Atmos. Sci. 2015, 72, 1648–1666. [Google Scholar] [CrossRef] [Green Version]
- Kostinski, A.; Jameson, A. Fluctuation properties of precipitation. Part I: On deviations of single-size drop counts from the Poisson distribution. J. Atmos. Sci. 1997, 54, 2174–2186. [Google Scholar] [CrossRef]
- Jameson, A.; Kostinski, A. Fluctuation properties of precipitation. Part IV: Finescale clustering of drops in variable rain. J. Atmos. Sci. 1999, 56, 82–91. [Google Scholar] [CrossRef]
- Uijlenhoet, R. Parameterization of Rainfall Microstructure for Radar Meteorology and Hydrology. Ph.D. Thesis, Wageningen University, Wageningen, The Netherlands, 1999. [Google Scholar]
- Marzuki; Randeu, W.; Schönhuber, M.; Bringi, V.; Kozu, T.; Shimomai, T. Raindrop size distribution parameters of disdrometer data with different bin sizes. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3075–3080. [Google Scholar] [CrossRef]
- Marzuki; Randeu, W.; Kozu, T.; Shimomai, T.; Schönhuber, M.; Hashiguchi, H. Estimation of raindrop size distribution parameters by maximum likelihood and L-moment methods: Effect of discretization. Atmos. Res. 2012, 112, 1–11. [Google Scholar] [CrossRef]
- Liu, X.; Gao, T.; Hu, Y.; Shi, X. Measuring hydrometeors using a preciptation microphysical characteristics sensor: Sampling effect of different bin sizes on drop size distribution parameters. Adv. Meteorol. 2018, 2018, 9727345. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measurement | 2DVD SN074 | 2DVD SN098 | Measurement | 2DVD SN074 | 2DVD SN098 |
|---|---|---|---|---|---|
| A | 134.3 mm | 132.8 mm | H | 134.0 mm | 131.7 mm |
| B | 126.1 mm | 125.2 mm | I | 126.6 mm | 124.1 mm |
| C | 78.1 mm | 78.6 mm | J | 79.2 mm | 77.9 mm |
| D | 70.2 mm | 70.9 mm | K | 71.4 mm | 70.8 mm |
| E | 40.1 mm | 39.6 mm | L | 39.7 mm | 39.9 mm |
| F | 291.3 mm | 291.0 mm | M | 291.3 mm | 289.0 mm |
| G | 40.4 mm | 40.3 mm | N | 40.0 mm | 40.4 mm |
| Spurious Drops | Area | Diameter | Total Accum. | ||
|---|---|---|---|---|---|
| Removed | Fixed | Binning | Depth (mm) | (mm) | (mm) |
| None | 7046.9 | 0.581 | 0.888 | ||
| N | N | Low-Bin | 5735.0 | 0.480 | 0.829 |
| Mid-Bin | 7177.2 | 0.580 | 0.894 | ||
| None | 7900.4 | 0.581 | 0.888 | ||
| N | Y | Low-Bin | 6449.4 | 0.480 | 0.829 |
| Mid-Bin | 8042.5 | 0.580 | 0.894 | ||
| None | 6560.4 | 0.579 | 0.880 | ||
| Y | N | Low-Bin | 5322.5 | 0.479 | 0.820 |
| Mid-Bin | 6684.3 | 0.579 | 0.886 | ||
| None | 7124.3 | 0.579 | 0.880 | ||
| Y | Y | Low-Bin | 5780.9 | 0.479 | 0.820 |
| Mid-Bin | 7258.7 | 0.579 | 0.886 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Larsen, M.L.; Blouin, C.K. Refinements to Data Acquired by 2-Dimensional Video Disdrometers. Atmosphere 2020, 11, 855. https://doi.org/10.3390/atmos11080855
Larsen ML, Blouin CK. Refinements to Data Acquired by 2-Dimensional Video Disdrometers. Atmosphere. 2020; 11(8):855. https://doi.org/10.3390/atmos11080855
Chicago/Turabian StyleLarsen, Michael L., and Christopher K. Blouin. 2020. "Refinements to Data Acquired by 2-Dimensional Video Disdrometers" Atmosphere 11, no. 8: 855. https://doi.org/10.3390/atmos11080855