
Maize (Zea mays L.) Stem Target Region Extraction and Stem Diameter Measurement Based on an Internal Gradient Algorithm in Field Conditions

 ,
, 
Abstract
:1. Introduction
2. Materials and Methods
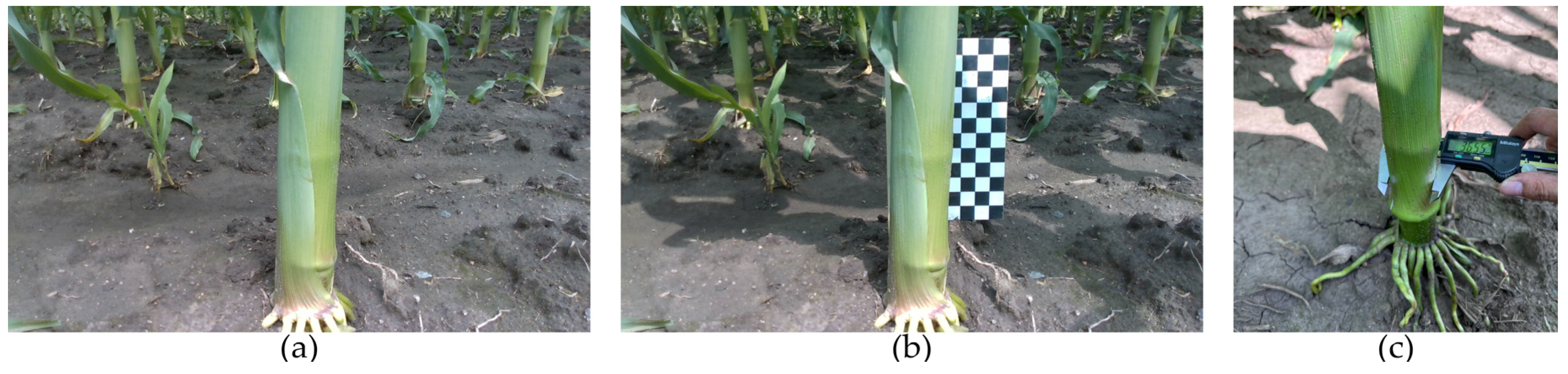
2.1. Image Data Collection
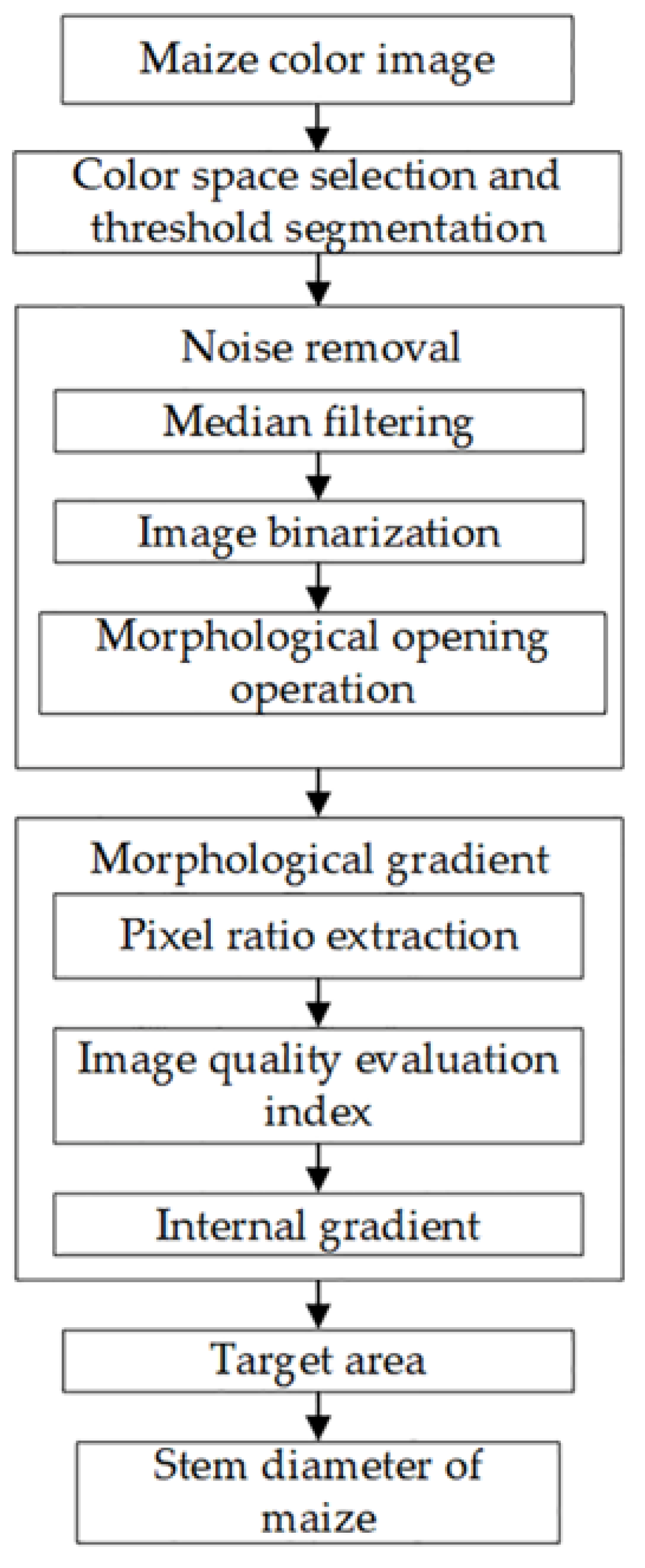
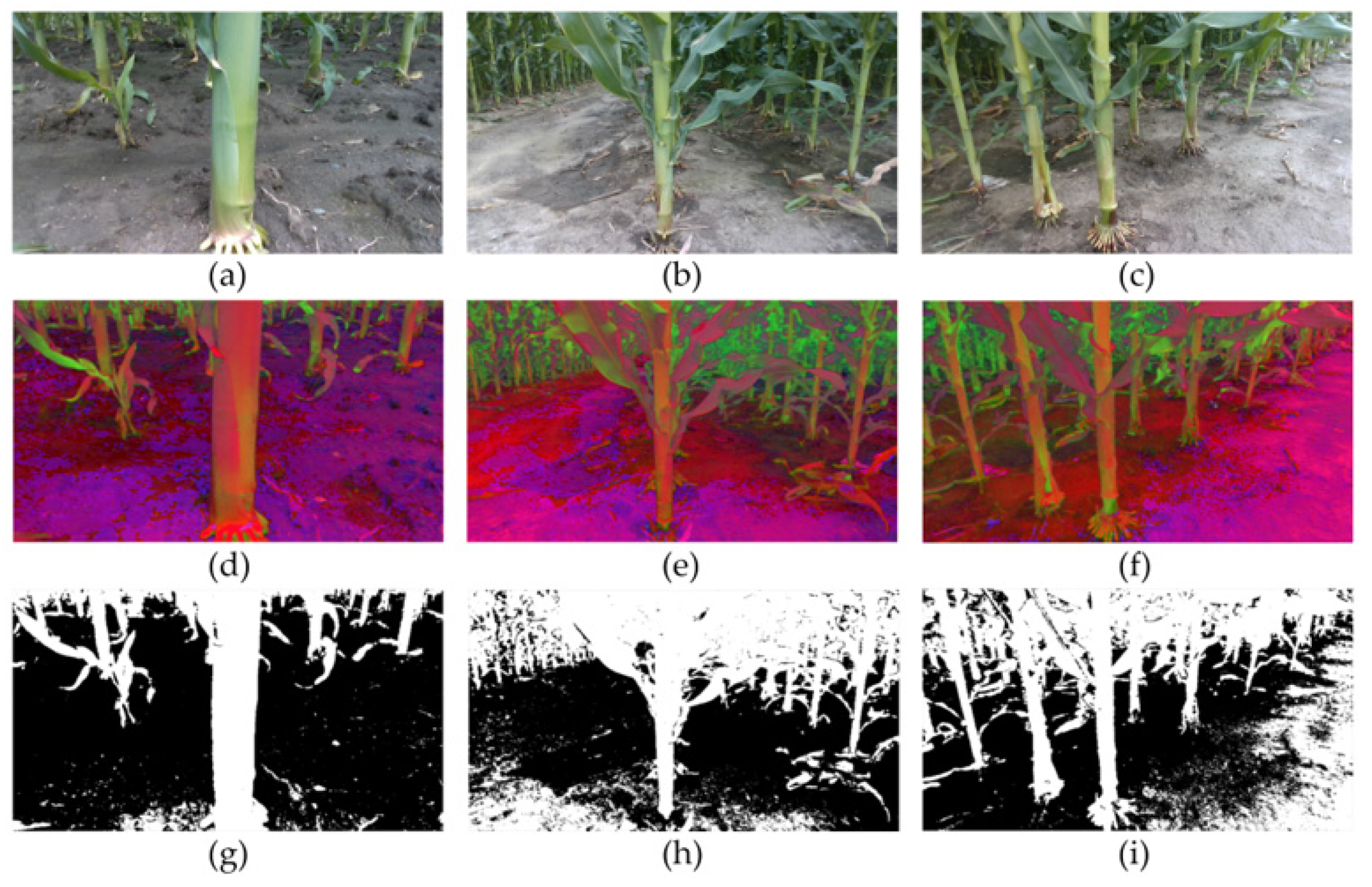
2.2. Image Segmentation and Filtering
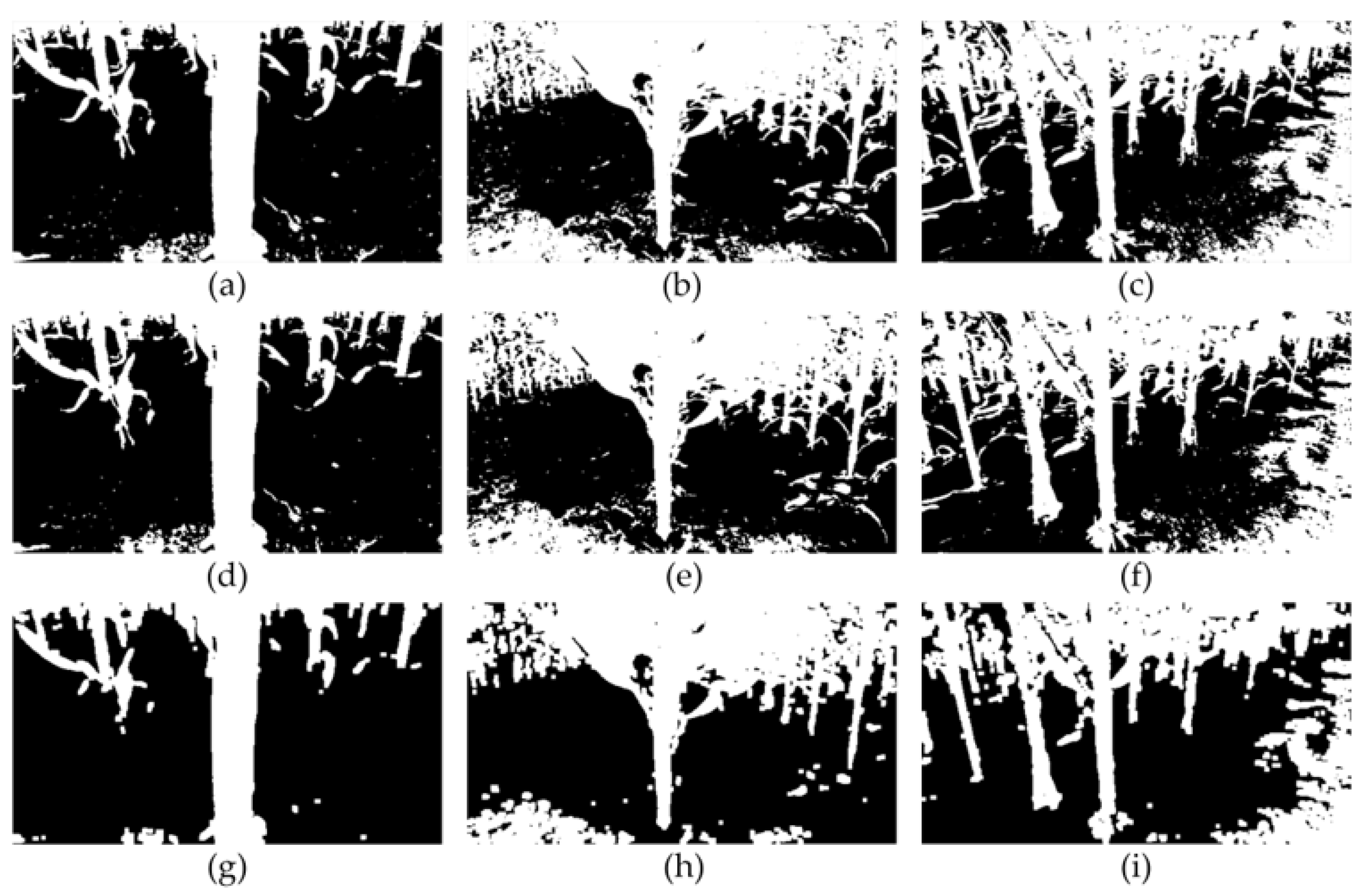
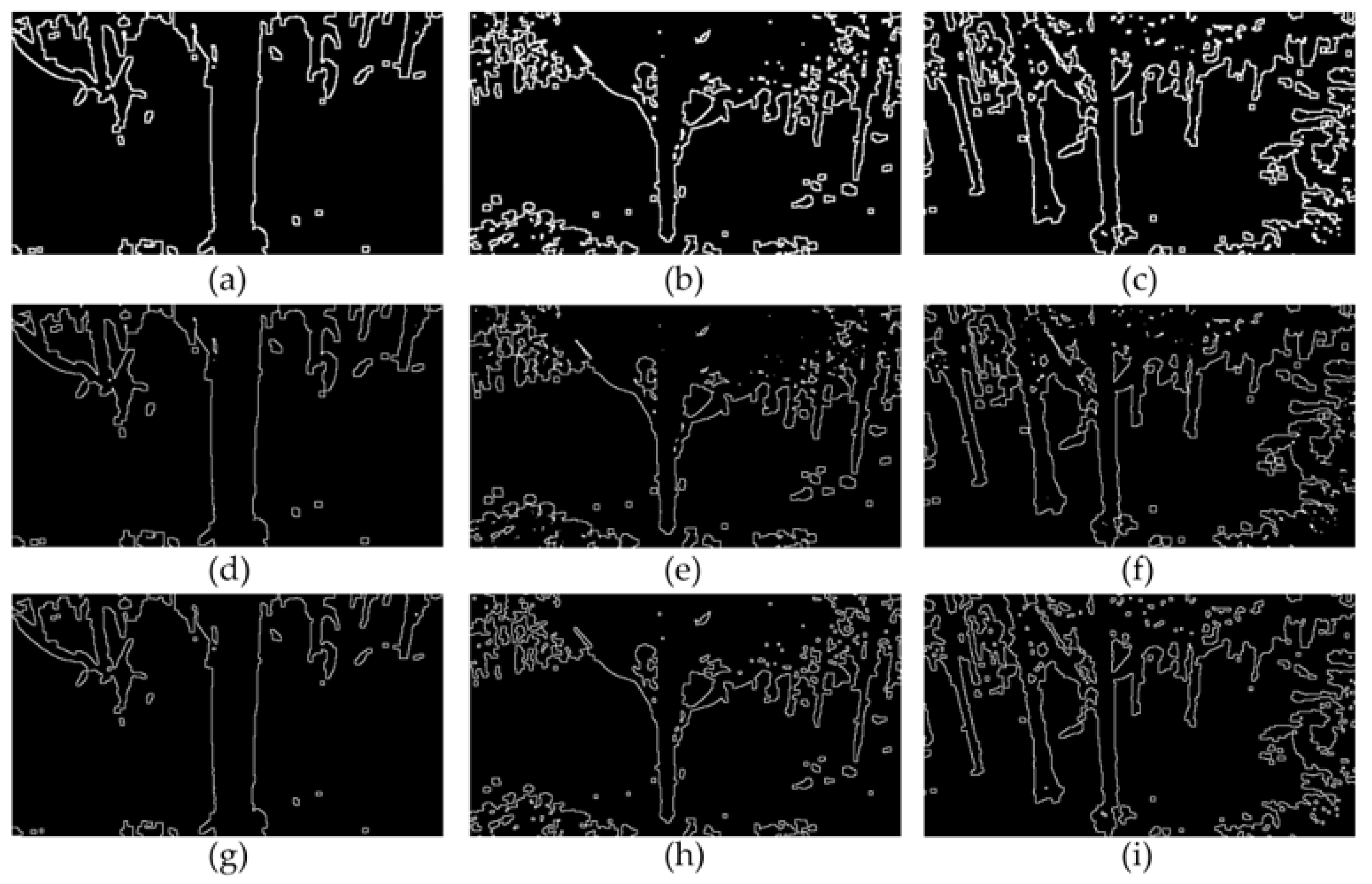
2.3. Morphological Gradient
2.4. Image Data Processing
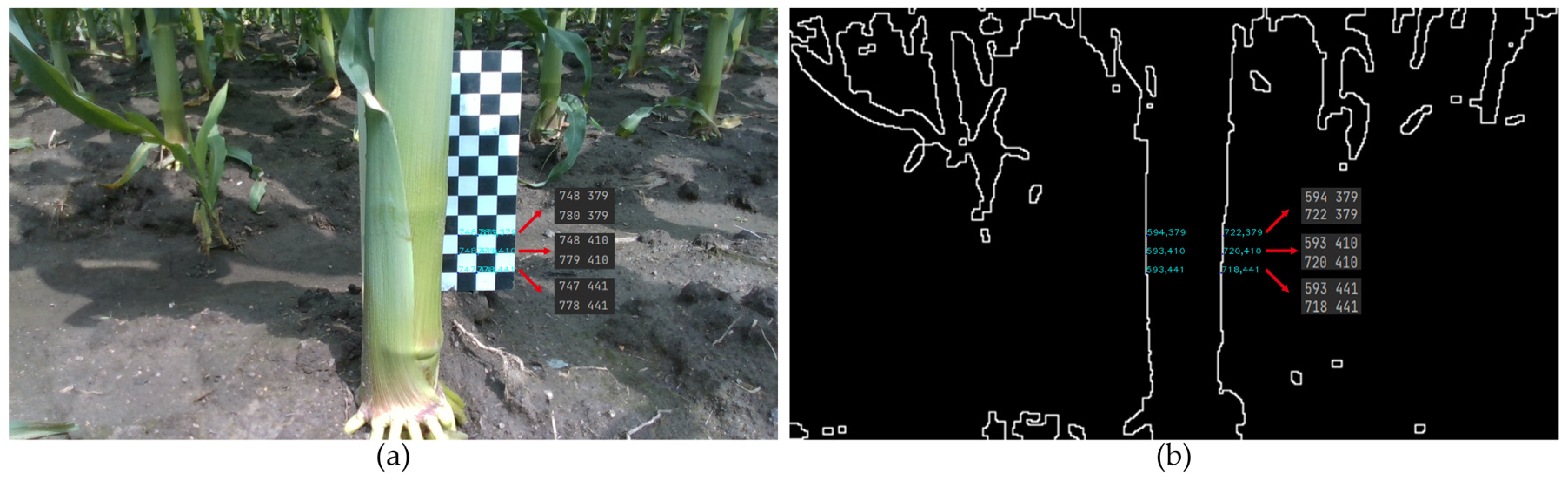
2.5. Coordinate Extraction and Maize Stem Diameter Measurement
2.6. Gradient Image Evaluation Method
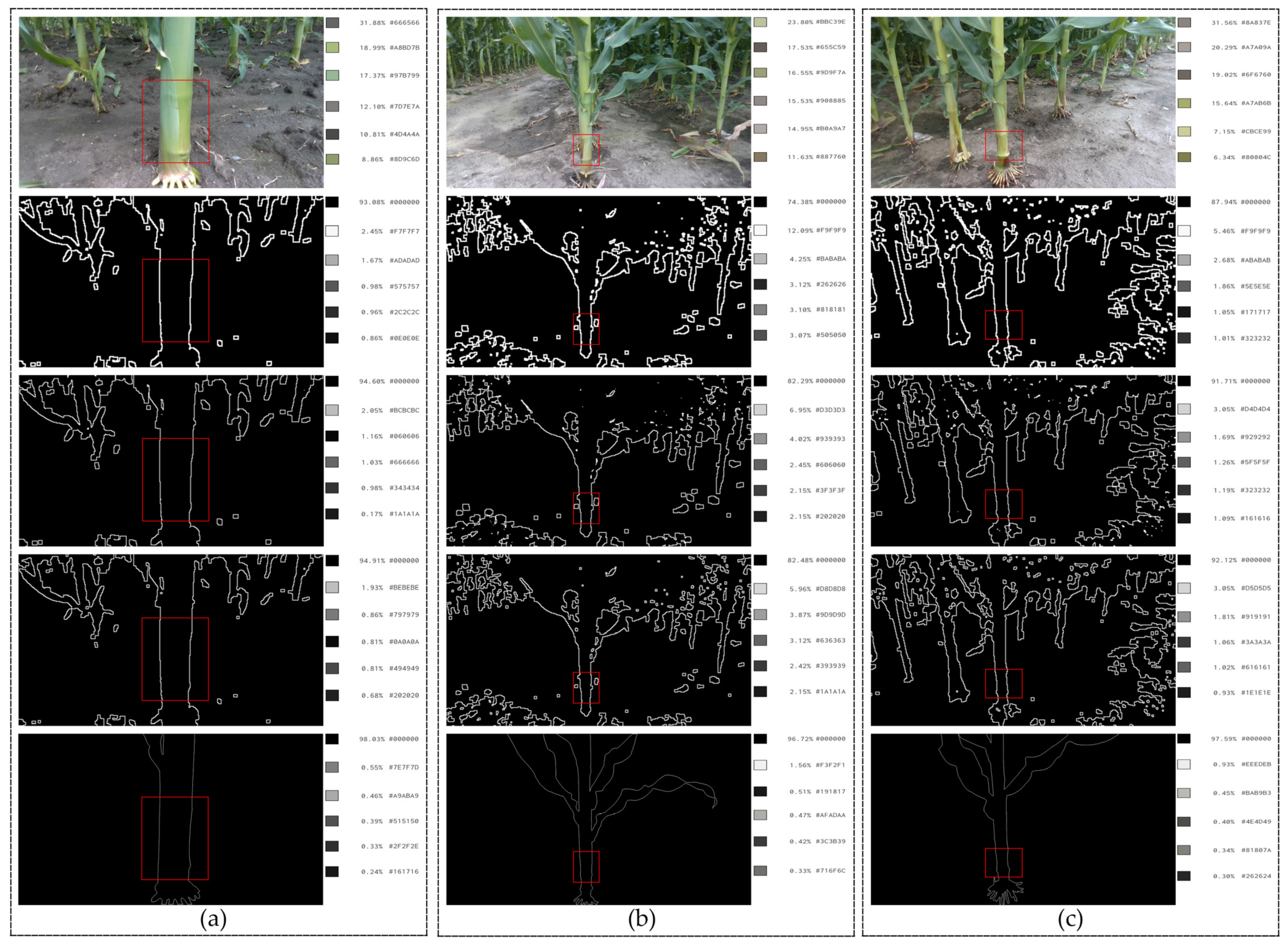
2.6.1. Pixel Proportion Extraction
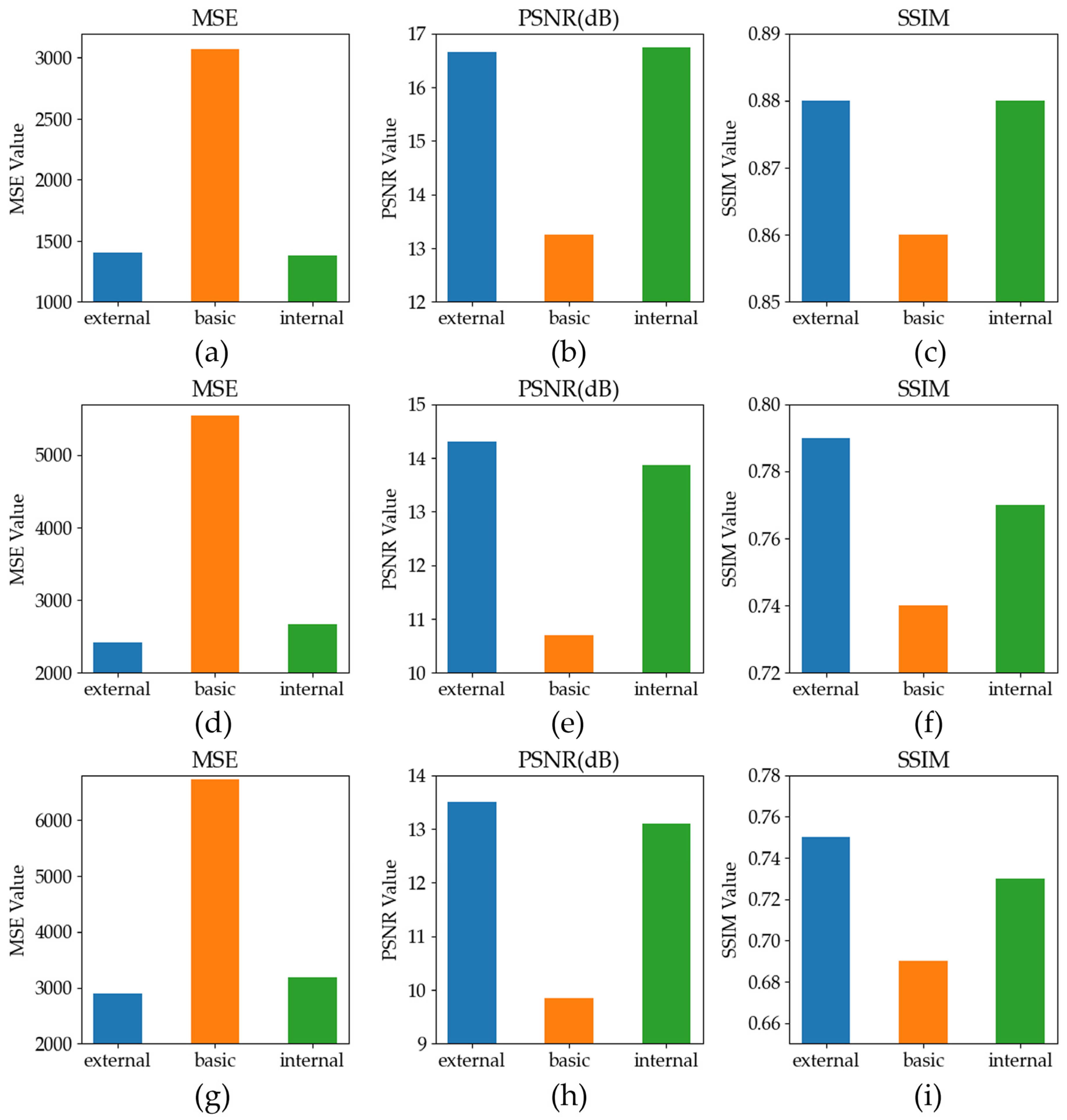
2.6.2. Image Quality Evaluation Metrics
2.7. Evaluation Metrics for Stem Diameter Error
3. Results
3.1. Analysis of Pixel Proportion Extraction Results
3.2. Analysis of Image Quality Evaluation Results
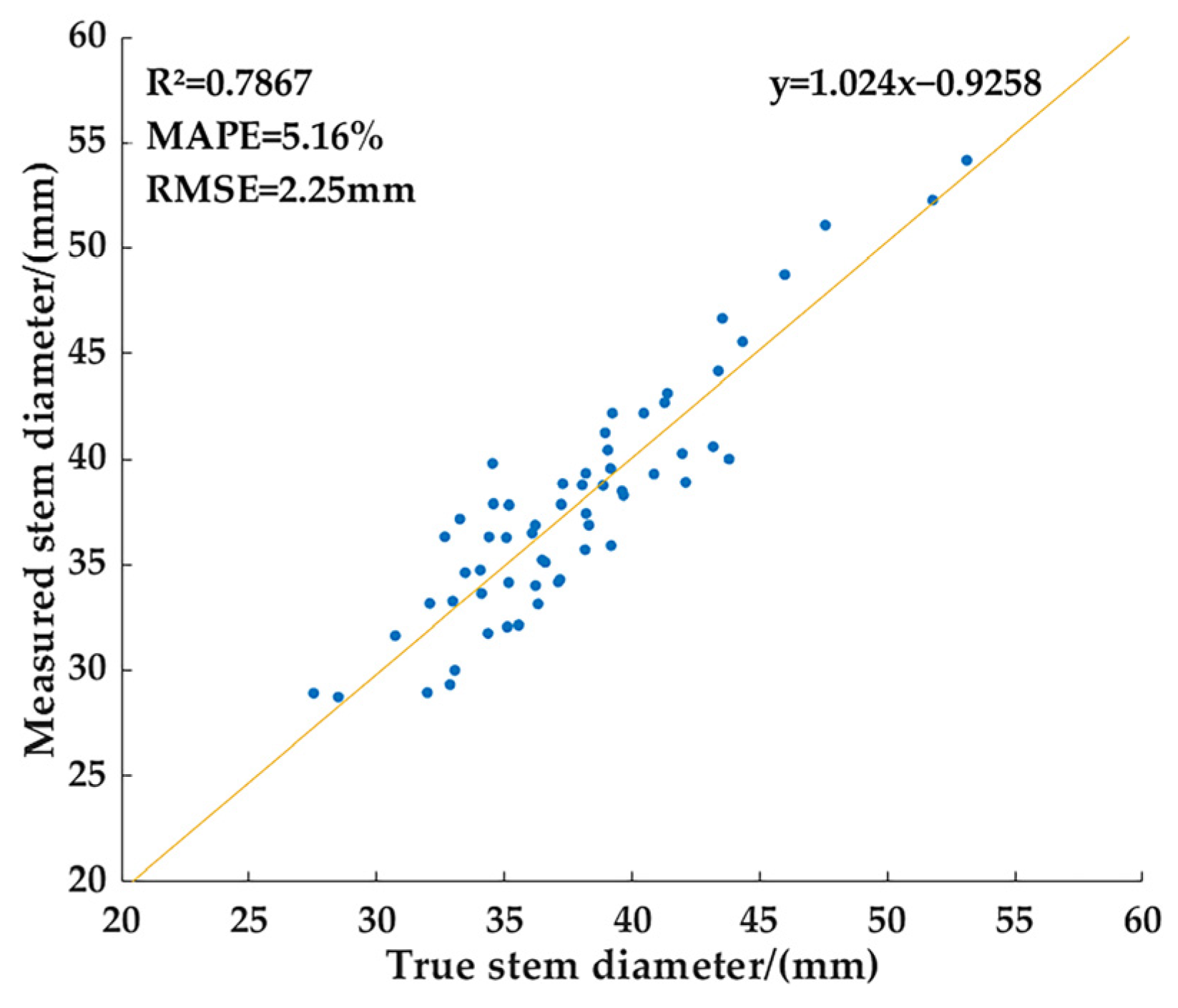
3.3. Error Analysis of Stem Diameter Measurement
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tilman, D.; Balzer, C.; Hill, J.; Befort, B.L. Global food demand and the sustainable intensification of agriculture. Proc. Natl. Acad. Sci. USA 2011, 108, 20260–20264. [Google Scholar] [CrossRef] [PubMed]
- Ray, D.K.; Ramankutty, N.; Mueller, N.D.; West, P.C.; Foley, J.A. Recent patterns of crop yield growth and stagnation. Nat. Commun. 2012, 3, 1293. [Google Scholar] [CrossRef] [PubMed]
- Ray, D.K.; Mueller, N.D.; West, P.C.; Foley, J.A. Yield trends are insufficient to double global crop production by 2050. PLoS ONE 2013, 8, e66428. [Google Scholar] [CrossRef] [PubMed]
- Cobb, J.N.; DeClerck, G.; Greenberg, A.; Clark, R.; McCouch, S. Next-generation phenotyping: Requirements and strategies for enhancing our understanding of genotype–phenotype relationships and its relevance to crop improvement. Theor. Appl. Genet. 2013, 126, 867–887. [Google Scholar] [CrossRef]
- Li, Y.; Sun, W.; Wang, Z.; Wan, C.; Zhang, J.; Qi, X.; Zhang, J. SDG102, a H3K36-Methyltransferase-Encoding Gene, Plays Pleiotropic Roles in Growth and Development of Maize (Zea mays L.). Int. J. Mol. Sci. 2022, 23, 7458. [Google Scholar] [CrossRef] [PubMed]
- Reynolds, M.; Chapman, S.; Crespo-Herrera, L.; Molero, G.; Mondal, S.; Pequeno, D.N.; Pinto, F.; Pinera-Chavez, F.J.; Poland, J.; Rivera-Amado, C. Breeder friendly phenotyping. Plant Sci. 2020, 295, 110396. [Google Scholar] [CrossRef] [PubMed]
- Montelatto, M.B.; Villamagua-Vergara, G.C.; De Brito, C.M.; Castanho, F.; Sartori, M.M.; de Almeida Silva, M.; Guerra, S.P.S. Bambusa vulgaris leaf area estimation on short-rotation coppice. Sci. For. 2021, 49, e3394. [Google Scholar] [CrossRef]
- Long, W.; Li, Q.; Wan, N.; Feng, D.; Kong, F.; Zhou, Y.; Yuan, J. Root morphological and physiological characteristics in maize seedlings adapted to low iron stress. PLoS ONE 2020, 15, e0239075. [Google Scholar] [CrossRef]
- Minervini, M.; Scharr, H.; Tsaftaris, S.A. Image analysis: The new bottleneck in plant phenotyping. IEEE Signal Process. Mag. 2015, 32, 126–131. [Google Scholar] [CrossRef]
- Houle, D.; Govindaraju, D.R.; Omholt, S. Phenomics: The next challenge. Nat. Rev. Genet. 2010, 11, 855–866. [Google Scholar] [CrossRef]
- Nuss, E.T.; Tanumihardjo, S.A. Maize: A paramount staple crop in the context of global nutrition. Compr. Rev. Food Sci. Food Saf. 2010, 9, 417–436. [Google Scholar] [CrossRef] [PubMed]
- Rouf Shah, T.; Prasad, K.; Kumar, P. Maize—A potential source of human nutrition and health: A review. Cogent Food Agric. 2016, 2, 1166995. [Google Scholar] [CrossRef]
- Siyuan, S.; Tong, L.; Liu, R. Corn phytochemicals and their health benefits. Food Sci. Hum. Wellness 2018, 7, 185–195. [Google Scholar] [CrossRef]
- Liu, H.; Wang, H.; Shao, C.; Han, Y.; He, Y.; Yin, Z. Genetic Architecture of Maize Stalk Diameter and Rind Penetrometer Resistance in a Recombinant Inbred Line Population. Genes 2022, 13, 579. [Google Scholar] [CrossRef] [PubMed]
- Xue, J.; Xie, R.; Zhang, W.; Wang, K.; Hou, P.; Ming, B.; Gou, L.; Li, S. Research progress on reduced lodging of high-yield and-density maize. J. Integr. Agric. 2017, 16, 2717–2725. [Google Scholar] [CrossRef]
- Kelly, J.; Crain, J.L.; Raun, W. By-plant prediction of corn (Zea mays L.) grain yield using height and stalk diameter. Commun. Soil Sci. Plant Anal. 2015, 46, 564–575. [Google Scholar] [CrossRef]
- Ma, X.; Zhu, K.; Guan, H.; Feng, J.; Yu, S.; Liu, G. Calculation method for phenotypic traits based on the 3D reconstruction of maize canopies. Sensors 2019, 19, 1201. [Google Scholar] [CrossRef]
- Chaivivatrakul, S.; Tang, L.; Dailey, M.N.; Nakarmi, A.D. Automatic morphological trait characterization for corn plants via 3D holographic reconstruction. Comput. Electron. Agric. 2014, 109, 109–123. [Google Scholar] [CrossRef]
- Fan, Z.; Sun, N.; Qiu, Q.; Li, T.; Feng, Q.; Zhao, C. In situ measuring stem diameters of maize crops with a high-throughput phenotyping robot. Remote Sens. 2022, 14, 1030. [Google Scholar] [CrossRef]
- Vit, A.; Shani, G. Comparing rgb-d sensors for close range outdoor agricultural phenotyping. Sensors 2018, 18, 4413. [Google Scholar] [CrossRef]
- Ismail, S.M.; Ozawa, K. Improvement of crop yield, soil moisture distribution and water use efficiency in sandy soils by clay application. Appl. Clay Sci. 2007, 37, 81–89. [Google Scholar] [CrossRef]
- Han, L.; Han, A. An improved edge detection algorithm based on morphological operators and gradient. J. Comput. Theor. Nanosci. 2015, 12, 1121–1125. [Google Scholar] [CrossRef]
- Wu, Y.; Li, Q. The Algorithm of Watershed Color Image Segmentation Based on Morphological Gradient. Sensors 2022, 22, 8202. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Liu, P.; Zhang, X.; Zheng, Q.; Chen, M.; Ge, F.; Li, Z.; Sun, W.; Guan, Z.; Liang, T. Multi-locus genome-wide association study reveals the genetic architecture of stalk lodging resistance-related traits in maize. Front. Plant Sci. 2018, 9, 611. [Google Scholar] [CrossRef] [PubMed]
- Hui, F.; Xie, Z.; Li, H.; Guo, Y.; Li, B.; Liu, Y.; Ma, Y. Image-based root phenotyping for field-grown crops: An example under maize/soybean intercropping. J. Integr. Agric. 2022, 21, 1606–1619. [Google Scholar] [CrossRef]
- Yang, W.; Wang, S.; Zhao, X.; Zhang, J.; Feng, J. Greenness identification based on HSV decision tree. Inf. Process. Agric. 2015, 2, 149–160. [Google Scholar] [CrossRef]
- Hamuda, E.; Mc Ginley, B.; Glavin, M.; Jones, E. Automatic crop detection under field conditions using the HSV colour space and morphological operations. Comput. Electron. Agric. 2017, 133, 97–107. [Google Scholar] [CrossRef]
- Chaves-González, J.M.; Vega-Rodríguez, M.A.; Gómez-Pulido, J.A.; Sánchez-Pérez, J.M. Detecting skin in face recognition systems: A colour spaces study. Digit. Signal Process. 2010, 20, 806–823. [Google Scholar] [CrossRef]
- Hamuda, E.; Glavin, M.; Jones, E. A survey of image processing techniques for plant extraction and segmentation in the field. Comput. Electron. Agric. 2016, 125, 184–199. [Google Scholar] [CrossRef]
- Meyer, G.E.; Neto, J.C. Verification of color vegetation indices for automated crop imaging applications. Comput. Electron. Agric. 2008, 63, 282–293. [Google Scholar] [CrossRef]
- Sun, Y.; Mu, Y.; Feng, Q.; Hu, T.; Gong, H.; Li, S.; Zhou, J. Deer body adaptive threshold segmentation algorithm based on color space. Comput. Mater. Contin. 2020, 64, 1317–1328. [Google Scholar] [CrossRef]
- Jin, S.; Su, Y.; Wu, F.; Pang, S.; Gao, S.; Hu, T.; Liu, J.; Guo, Q. Stem–leaf segmentation and phenotypic trait extraction of individual maize using terrestrial LiDAR data. IEEE Trans. Geosci. Remote Sens. 2018, 57, 1336–1346. [Google Scholar] [CrossRef]
- Zhou, J.; Wu, Y.; Chen, J.; Cui, M.; Gao, Y.; Meng, K.; Wu, M.; Guo, X.; Wen, W. Maize Stem Contour Extraction and Diameter Measurement Based on Adaptive Threshold Segmentation in Field Conditions. Agriculture 2023, 13, 678. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | True Stem Diameter/ mm | Measured Stem Diameter/ mm | Absolute Error/mm | Number | True Stem Diameter/ mm | Measured Stem Diameter/ mm | Absolute Error/mm |
|---|---|---|---|---|---|---|---|
| 1 | 36.09 | 36.50 | 0.41 | 31 | 34.40 | 36.32 | 1.92 |
| 2 | 34.11 | 33.63 | 0.48 | 32 | 33.06 | 30.00 | 3.06 |
| 3 | 31.98 | 28.94 | 3.04 | 33 | 39.23 | 42.19 | 2.96 |
| 4 | 27.53 | 28.91 | 1.38 | 34 | 34.06 | 34.74 | 0.68 |
| 5 | 37.29 | 38.83 | 1.54 | 35 | 34.36 | 31.76 | 2.60 |
| 6 | 38.20 | 37.43 | 0.77 | 36 | 43.80 | 40.00 | 3.80 |
| 7 | 34.54 | 39.79 | 5.25 | 37 | 38.16 | 35.71 | 2.45 |
| 8 | 35.08 | 36.29 | 1.21 | 38 | 32.87 | 29.32 | 3.55 |
| 9 | 32.08 | 33.16 | 1.08 | 39 | 35.12 | 32.05 | 3.07 |
| 10 | 30.73 | 31.65 | 0.92 | 40 | 39.61 | 38.48 | 1.13 |
| 11 | 38.05 | 38.77 | 0.72 | 41 | 40.86 | 39.29 | 1.57 |
| 12 | 36.22 | 34.00 | 2.22 | 42 | 39.05 | 40.43 | 1.38 |
| 13 | 37.11 | 34.18 | 2.93 | 43 | 42.10 | 38.89 | 3.21 |
| 14 | 32.67 | 36.33 | 3.66 | 44 | 36.48 | 35.22 | 1.26 |
| 15 | 44.33 | 45.56 | 1.23 | 45 | 32.98 | 33.26 | 0.28 |
| 16 | 35.17 | 34.15 | 1.02 | 46 | 38.31 | 36.88 | 1.43 |
| 17 | 36.60 | 35.11 | 1.49 | 47 | 36.32 | 33.13 | 3.19 |
| 18 | 28.50 | 28.73 | 0.23 | 48 | 36.21 | 36.88 | 0.67 |
| 19 | 41.97 | 40.26 | 1.71 | 49 | 39.16 | 39.55 | 0.39 |
| 20 | 45.98 | 48.75 | 2.77 | 50 | 39.67 | 38.28 | 1.39 |
| 21 | 38.19 | 39.32 | 1.13 | 51 | 37.23 | 37.86 | 0.63 |
| 22 | 47.57 | 51.08 | 3.51 | 52 | 37.18 | 34.29 | 2.89 |
| 23 | 41.28 | 42.69 | 1.41 | 53 | 38.95 | 41.25 | 2.30 |
| 24 | 51.78 | 52.27 | 0.49 | 54 | 35.56 | 32.14 | 3.42 |
| 25 | 39.18 | 35.91 | 3.27 | 55 | 38.87 | 38.75 | 0.12 |
| 26 | 53.11 | 54.17 | 1.06 | 56 | 43.38 | 44.17 | 0.79 |
| 27 | 41.39 | 43.13 | 1.74 | 57 | 34.57 | 37.89 | 3.32 |
| 28 | 43.18 | 40.59 | 2.59 | 58 | 33.26 | 37.17 | 3.91 |
| 29 | 40.46 | 42.19 | 1.73 | 59 | 35.18 | 37.83 | 2.65 |
| 30 | 43.54 | 46.67 | 3.13 | 60 | 33.47 | 34.62 | 1.15 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, J.; Cui, M.; Wu, Y.; Gao, Y.; Tang, Y.; Chen, Z.; Hou, L.; Tian, H. Maize (Zea mays L.) Stem Target Region Extraction and Stem Diameter Measurement Based on an Internal Gradient Algorithm in Field Conditions. Agronomy 2023, 13, 1185. https://doi.org/10.3390/agronomy13051185
Zhou J, Cui M, Wu Y, Gao Y, Tang Y, Chen Z, Hou L, Tian H. Maize (Zea mays L.) Stem Target Region Extraction and Stem Diameter Measurement Based on an Internal Gradient Algorithm in Field Conditions. Agronomy. 2023; 13(5):1185. https://doi.org/10.3390/agronomy13051185
Chicago/Turabian StyleZhou, Jing, Mingren Cui, Yushan Wu, Yudi Gao, Yijia Tang, Zhiyi Chen, Lixin Hou, and Haijuan Tian. 2023. "Maize (Zea mays L.) Stem Target Region Extraction and Stem Diameter Measurement Based on an Internal Gradient Algorithm in Field Conditions" Agronomy 13, no. 5: 1185. https://doi.org/10.3390/agronomy13051185