
Improvement of Wheat Growth Information by Fusing UAV Visible and Thermal Infrared Images

Abstract
:1. Introduction
2. Materials and Methods
2.1. Acquisition of Experimental Data
2.2. Indicators for Describing Remotely Sensed Images
2.3. Regional Variance Matching (RVM)
2.4. Wavelet Transform and IHS Transform
2.5. Our Proposed Method
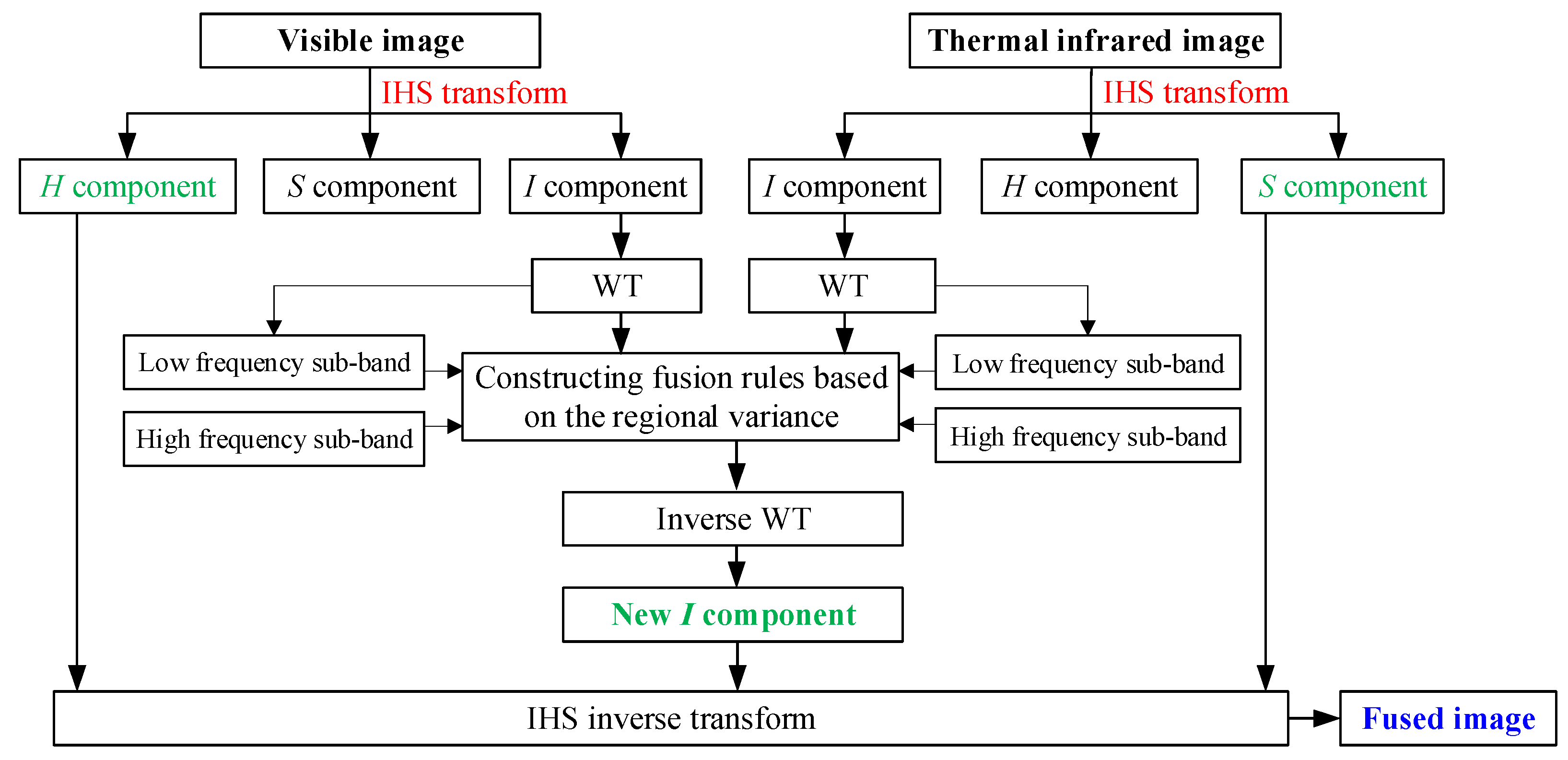
2.5.1. The General Workflow
- (a)
- After registering both the visible and TIR images, they are respectively transformed from RGB space to IHS space.
- (b)
- The I components of the visible and TIR images are decomposed into four layers: wavelet, base, selects and sym4.
- (c)
- The average values of LF components of the two sets of wavelet coefficients for the I components are calculated.
- (d)
- The regional variance of HF coefficients of the visible and TIR images are calculated.
- (e)
- The fusion rules are constructed based on the regional variance to perform the inverse WT and obtain the new I component.
- (f)
- The IHS inverse transform is used to fuse the visible and TIR images through the new I component, H component of visible image and S component of TIR image.
2.5.2. Determination of Fusion Rules for LF and HF Sub-Bands
- (1)
- Fusion Rule for LF Sub-band
- (2)
- Fusion Rule for HF Sub-band
2.6. Indicators to Evaluate the Fusion Effect
2.6.1. Visual Interpretation
2.6.2. Quantitative Indicators
- (1)
- Entropy
- (2)
- Standard deviation
- (3)
- Average gradient
- (4)
- Correlation coefficient
- (5)
- Deviation index
3. Results and Discussion
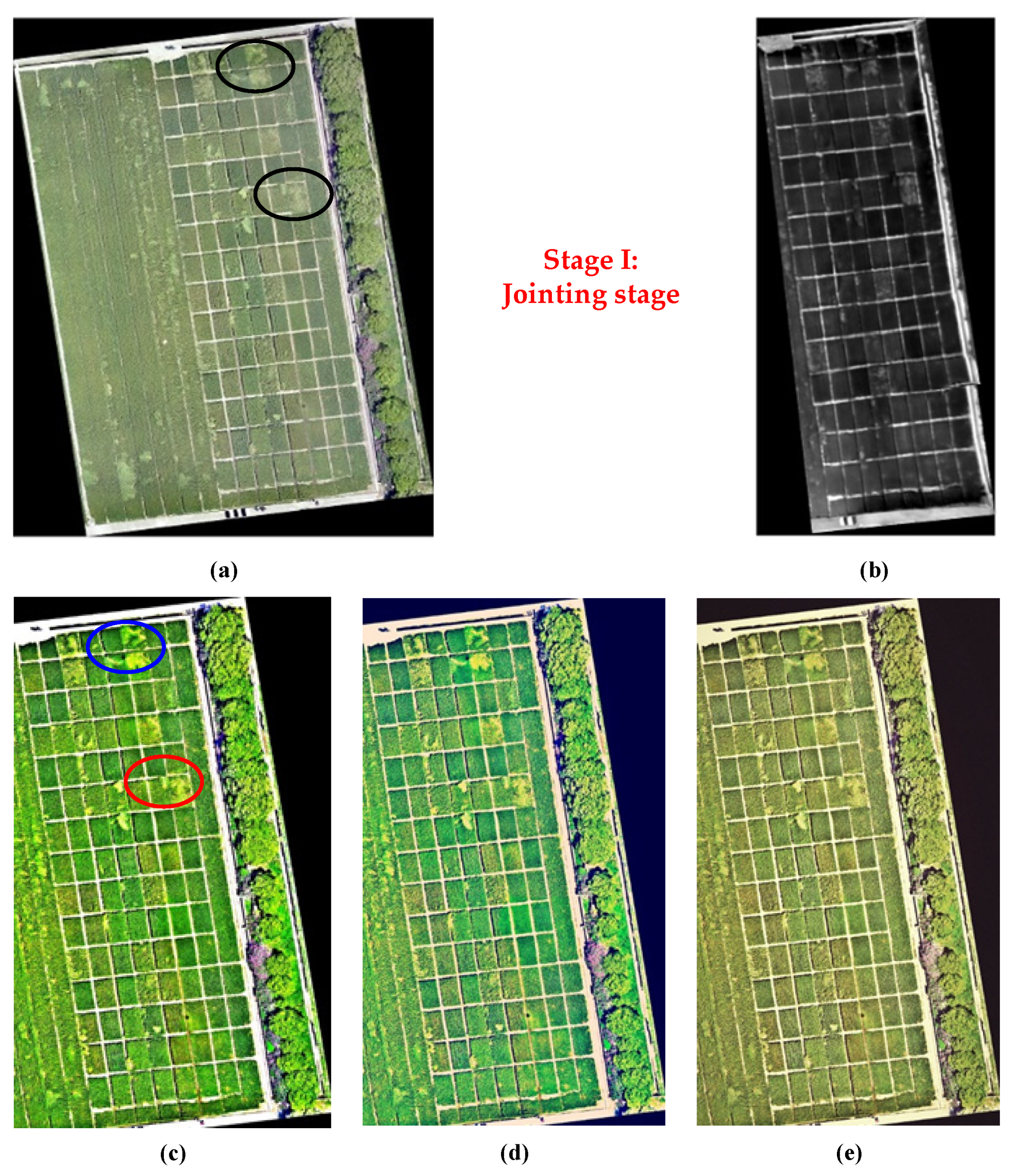
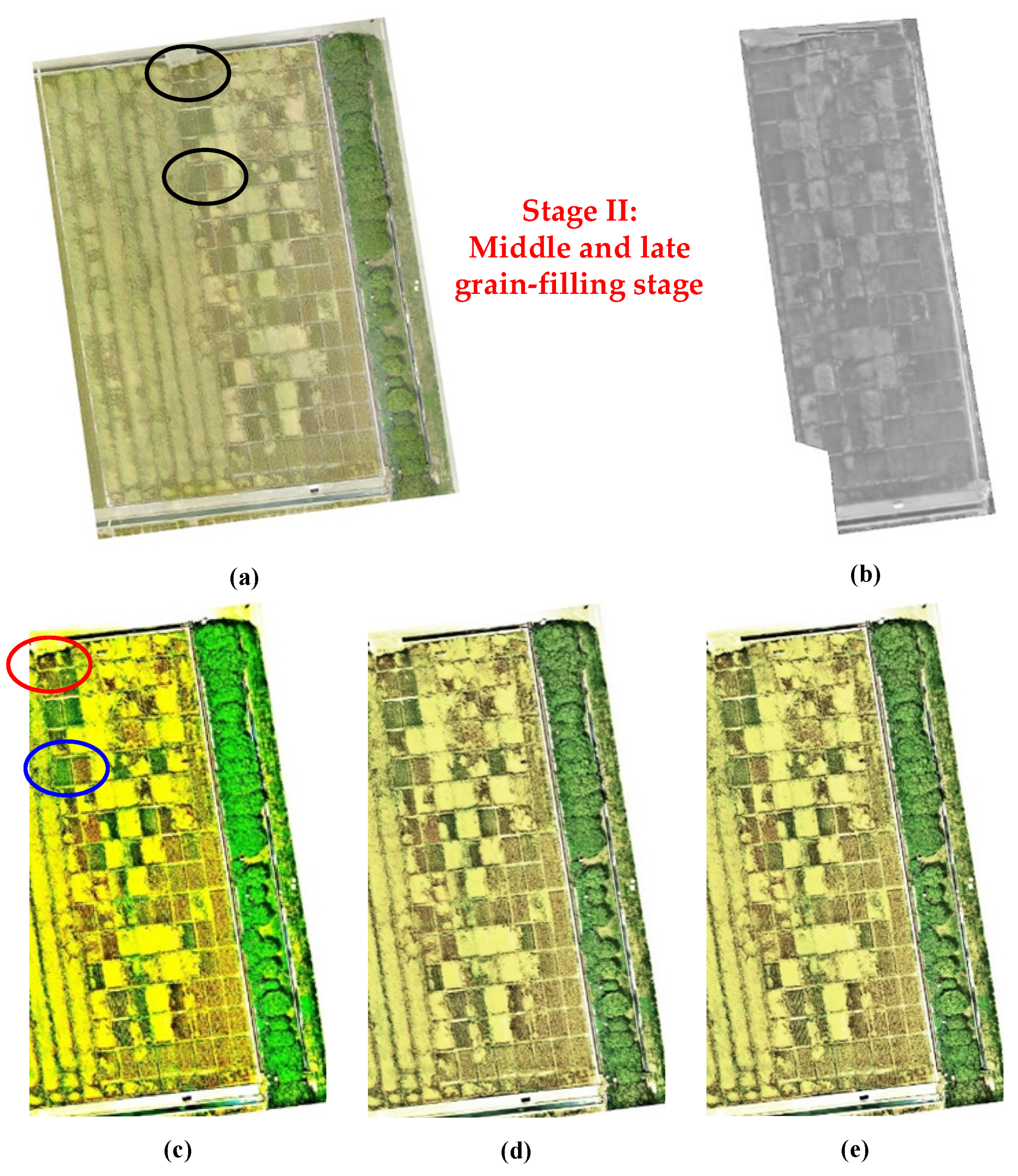
3.1. Visual Assessment
3.2. Quantitative Comparison
3.3. Comaprison of Other Fusion Methods with Ours
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Manolakis, D.; Shaw, G. Detection algorithms for hyperspectral imaging applications. IEEE Signal Proc. Mag. 2002, 19, 29–43. [Google Scholar] [CrossRef]
- Zhou, Y.; Guo, H.; Ma, L.; Zhang, Z.; Skitmore, M. Image-based onsite object recognition for automatic crane lifting tasks. Autom. Constr. 2021, 123, 103527. [Google Scholar] [CrossRef]
- Hong, Z.Q. Algebraic feature extraction of image for recognition. Pattern Recogn. 1991, 24, 211–219. [Google Scholar] [CrossRef]
- Harsanyi, J.C.; Chang, C.I. Hyperspectral image classification and dimensionality reduction: An orthogonal subspace projection approach. IEEE Trans. Geosci. Remote Sens. 1994, 32, 779–785. [Google Scholar] [CrossRef]
- Zhang, H.; Xu, H.; Tian, X.; Jiang, J.; Ma, J. Image fusion meets deep learning: A survey and perspective. Inform. Fusion 2021, 76, 323–336. [Google Scholar] [CrossRef]
- Pohl, C.; Van Genderen, J.L. Review article multisensor image fusion in remote sensing: Concepts, methods and applications. Int. J. Remote Sens. 1998, 19, 823–854. [Google Scholar] [CrossRef]
- Ehlers, M.; Klonus, S.; Johan Åstrand, P.; Rosso, P. Multi-sensor image fusion for pansharpening in remote sensing. Int. J. Image Data Fusion 2010, 1, 25–45. [Google Scholar] [CrossRef]
- Simone, G.; Farina, A.; Morabito, F.C.; Serpico, S.B.; Bruzzone, L. Image fusion techniques for remote sensing applications. Inform. Fusion 2002, 3, 3–15. [Google Scholar] [CrossRef]
- Ghassemian, H. A review of remote sensing image fusion methods. Inform. Fusion 2016, 32, 75–89. [Google Scholar] [CrossRef]
- Tu, T.M.; Su, S.C.; Shyu, H.C.; Huang, P.S. A new look at IHS-like image fusion methods. Inform. Fusion 2001, 2, 177–186. [Google Scholar] [CrossRef]
- Nunez, J.; Otazu, X.; Fors, O.; Prades, A.; Pala, V.; Arbiol, R. Multiresolution-based image fusion with additive wavelet decomposition. IEEE Trans. Geosci. Remote Sens. 1999, 37, 1204–1211. [Google Scholar] [CrossRef]
- Pajares, G.; De La Cruz, J.M. A wavelet-based image fusion tutorial. Pattern Recogn. 2004, 37, 1855–1872. [Google Scholar] [CrossRef]
- Joshi, N.; Baumann, M.; Ehammer, A.; Fensholt, R.; Grogan, K.; Hostert, P.; Jepsen, M.R.; Kuemmerle, T.; Meyfroidt, P.; Mitchard, E.T.A.; et al. A review of the application of optical and radar remote sensing data fusion to land use mapping and monitoring. Remote Sens. 2016, 8, 70. [Google Scholar] [CrossRef]
- Nichol, J.; Wong, M.S. Satellite remote sensing for detailed landslide inventories using change detection and image fusion. Int. J. Remote Sens. 2005, 26, 1913–1926. [Google Scholar] [CrossRef]
- Dalponte, M.; Bruzzone, L.; Gianelle, D. Fusion of hyperspectral and LIDAR remote sensing data for classification of complex forest areas. IEEE Trans. Geosci. Remote Sens. 2008, 46, 1416–1427. [Google Scholar] [CrossRef]
- Li, S.; Yin, H.; Fang, L. Remote sensing image fusion via sparse representations over learned dictionaries. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4779–4789. [Google Scholar] [CrossRef]
- Guo, Q.; Chen, S.; Leung, H.; Liu, S. Covariance intersection based image fusion technique with application to pansharpening in remote sensing. Inform. Sci. 2010, 180, 3434–3443. [Google Scholar] [CrossRef]
- Luo, B.; Khan, M.M.; Bienvenu, T.; Chanussot, J.; Zhang, L. Decision-based fusion for pansharpening of remote sensing images. IEEE Geosci. Remote Sens. Lett. 2013, 10, 19–23. [Google Scholar]
- Solberg, A.H.S.; Jain, A.K.; Taxt, T. Multisource classification of remotely sensed data: Fusion of Landsat TM and SAR images. IEEE Trans. Geosci. Remote Sens. 1994, 32, 768–778. [Google Scholar] [CrossRef]
- Palubinskas, G.; Reinartz, P.; Bamler, R. Image acquisition geometry analysis for the fusion of optical and radar remote sensing data. Int. J. Image Data Fusion 2010, 1, 271–282. [Google Scholar] [CrossRef]
- Chen, C.M.; Hepner, G.F.; Forster, R.R. Fusion of hyperspectral and radar data using the IHS transformation to enhance urban surface features. ISPRS J. Photogram. 2003, 58, 19–30. [Google Scholar] [CrossRef]
- Held, A.; Ticehurst, C.; Lymburner, L.; Williams, N. High resolution mapping of tropical mangrove ecosystems using hyperspectral and radar remote sensing. Int. J. Remote Sens. 2003, 24, 2739–2759. [Google Scholar] [CrossRef]
- Besiris, D.; Tsagaris, V.; Fragoulis, N.; Theoharatos, C. An FPGA-based hardware implementation of configurable pixel-level color image fusion. IEEE Trans. Geosci. Remote Sens. 2012, 50, 362. [Google Scholar] [CrossRef]
- Sankey, T.; Donager, J.; McVay, J.; Sankey, J.B. UAV lidar and hyperspectral fusion for forest monitoring in the southwestern USA. Remote Sens. Environ. 2017, 195, 30–43. [Google Scholar] [CrossRef]
- López-Granados, F.; Torres-Sánchez, J.; De Castro, A.I.; Serrano-Pérez, A.; Mesas-Carrascosa, F.J.; Peña, J.M. Object-based early monitoring of a grass weed in a grass crop using high resolution UAV imagery. Agron. Sustain. Dev. 2016, 36, 67. [Google Scholar] [CrossRef]
- Aasen, H.; Burkart, A.; Bolten, A.; Bareth, G. Generating 3D hyperspectral information with lightweight UAV snapshot cameras for vegetation monitoring: From camera calibration to quality assurance. ISPRS J. Photogramm. Remote Sens. 2015, 108, 245–259. [Google Scholar] [CrossRef]
- Berni, J.A.; Zarco-Tejada, P.J.; Suárez, L.; Fereres, E. Thermal and narrowband multispectral remote sensing for vegetation monitoring from an unmanned aerial vehicle. IEEE Trans. Geosci. Remote Sens. 2009, 47, 722–738. [Google Scholar] [CrossRef]
- Näsi, R.; Honkavaara, E.; Lyytikäinen-Saarenmaa, P.; Blomqvist, M.; Litkey, P.; Hakala, T.; Viljanen, N.; Kantola, T.; Tanhuanpää, T.; Holopainen, M. Using UAV-based photogrammetry and hyperspectral imaging for mapping bark beetle damage at tree-level. Remote Sens. 2015, 7, 15467–15493. [Google Scholar] [CrossRef]
- Niu, Y.; Xu, S.; Wu, L.; Hu, W. Airborne infrared and visible image fusion for target perception based on target region segmentation and discrete wavelet transform. Math. Probl. Eng. 2012, 2012, 275138. [Google Scholar] [CrossRef]
- Calderón, R.; Navas-Cortés, J.A.; Lucena, C.; Zarco-Tejada, P.J. High-resolution airborne hyperspectral and thermal imagery for early detection of Verticillium wilt of olive using fluorescence, temperature and narrow-band spectral indices. Remote Sens. Environ. 2013, 139, 231–245. [Google Scholar] [CrossRef]
- Jin, Z.; Chen, G.; Hou, J.; Jiang, Q.; Zhou, D.; Yao, X. Multimodal sensor medical image fusion based on nonsubsampled shearlet transform and S-PCNNs in HSV space. Signal Process. 2018, 153, 379–395. [Google Scholar] [CrossRef]
- Barlow, J.S. Methods of analysis of nonstationary EEGs with emphasis on segmentations techniques: A comparative review. J. Clin. Neurophysiol. 1985, 2, 267–304. [Google Scholar] [CrossRef]
- Karathanassi, V.; Kolokousis, P.; Ioannidou, S. A comparison study on fusion methods using evaluation indicators. Int. J. Remote Sens. 2007, 28, 2309–2341. [Google Scholar] [CrossRef]
- Zhang, Y.; Hong, G. An IHS and wavelet integrated approach to improve pan-sharpening visual quality of natural colour IKONOS and QuickBird images. Inform. Fusion 2005, 6, 225–234. [Google Scholar] [CrossRef]
- Daubechies, I. The wavelet transform, time-frequency localization and signal analysis. IEEE Trans. Inform. Theory 1990, 36, 961–1005. [Google Scholar] [CrossRef]
- Wang, Z.; Ziou, D.; Armenakis, C.; Li, D.; Li, Q. A comparative analysis of image fusion methods. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1391–1402. [Google Scholar] [CrossRef]
- Yang, H.; Du, Q.; Ma, B. Decision fusion on supervised and unsupervised classifiers for hyperspectral imagery. IEEE Geosci. Remote Sens. 2010, 7, 875–879. [Google Scholar] [CrossRef]
- Yuan, Q.; Zhang, L.; Shen, H. Hyperspectral image denoising with a spatial–spectral view fusion strategy. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2314–2325. [Google Scholar] [CrossRef]
- El-Kawy, O.A.; Rød, J.K.; Ismail, H.A.; Suliman, A.S. Land use and land cover change detection in the western Nile delta of Egypt using remote sensing data. Appl. Geogr. 2011, 31, 483–494. [Google Scholar] [CrossRef]
- Shi, A.; Xu, L.; Xu, F.; Huang, C. Multispectral and panchromatic image fusion based on improved bilateral. J. Appl. Remote Sens. 2011, 5, 053542. [Google Scholar] [CrossRef]
- Liu, X.; Zhou, Y.; Wang, J. Image fusion based on shearlet transform and regional features. AEU-Int. J. Electron. Commun. 2014, 68, 471–477. [Google Scholar] [CrossRef]
- Varshney, P.K. Multisensor data fusion. Electron. Commun. Eng. 1997, 9, 245–253. [Google Scholar] [CrossRef]
- Chai, Y.; Li, H.F.; Guo, M.Y. Multifocus image fusion scheme based on features of multiscale products and PCNN in lifting stationary wavelet domain. Opt. Commun. 2011, 284, 1146–1158. [Google Scholar] [CrossRef]
- Du, C.; Gao, S. Multi-focus image fusion algorithm based on pulse coupled neural networks and modified decision map. Optik 2018, 157, 1003–1015. [Google Scholar] [CrossRef]
- Tang, S.; Shen, C.; Zhang, G. Adaptive regularized scheme for remote sensing image fusion. Front. Earth Sci. 2016, 10, 236–244. [Google Scholar] [CrossRef]
- Shannon, C.E. A note on the concept of entropy. Bell Syst. Tech. J. 1948, 27, 379–423. [Google Scholar] [CrossRef]
- De Albuquerque, M.P.; Esquef, I.A.; Mello, A.G. Image thresholding using Tsallis entropy. Pattern Recogn. Lett. 2004, 25, 1059–1065. [Google Scholar] [CrossRef]
- Hang, R.; Liu, Q.; Song, H.; Sun, Y. Marix-Based Discriminant subspace ensemble for hyperspectral image spatial–spectral feature fusion. IEEE Geosci. Remote Sens. 2016, 54, 783–794. [Google Scholar] [CrossRef]
- Udupa, J.K.; Samarasekera, S. Fuzzy connectedness and object definition: Theory, algorithms, and applications in image segmentation. Graph. Models Image Process. 1996, 58, 246–261. [Google Scholar] [CrossRef]
- Taylor, R. Interpretation of the correlation coefficient: A basic review. J. Diagn. Med. Sonogr. 1990, 6, 35–39. [Google Scholar] [CrossRef]
- Dou, W.; Chen, Y.; Li, X.; Sui, D.Z. A general framework for component substitution image fusion: An implementation using the fast image fusion method. Comput. Geosci. 2007, 33, 219–228. [Google Scholar] [CrossRef]
- Pavlovic, V.I.; Sharma, R.; Huang, T.S. Visual interpretation of hand gestures for human-computer interaction: A review. IEEE Trans. Pattern Anal. Mach. Intell. 1997, 19, 677–695. [Google Scholar] [CrossRef]
- Hamylton, S.M.; Morris, R.H.; Carvalho, R.C.; Roder, N.; Barlow, P.; Mills, K.; Wang, L. Evaluating techniques for mapping island vegetation from unmanned aerial vehicle (UAV) images: Pixel classification, visual interpretation and machine learning approaches. Int. J. Appl. Earth Obs. Geoinf. 2020, 89, 102085. [Google Scholar] [CrossRef]
- Zhang, Y. Understanding image fusion. Photogramm. Eng. Remote Sens. 2004, 70, 657–661. [Google Scholar]
- Kraff, N.J.; Wurm, M.; Taubenböck, H. Uncertainties of human perception in visual image interpretation in complex urban environments. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 4229–4241. [Google Scholar] [CrossRef]
- Moshou, D.; Pantazi, X.E.; Kateris, D.; Gravalos, I. Water stress detection based on optical multisensor fusion with a least squares support vector machine classifier. Biosyst. Eng. 2014, 117, 15–22. [Google Scholar] [CrossRef]
- Li, S.; Yang, B.; Hu, J. Performance comparison of different multi-resolution transforms for image fusion. Infor. Inform. Fusion 2011, 12, 74–84. [Google Scholar] [CrossRef]
- Zhang, Q.; Guo, B.L. Multifocus image fusion using the nonsubsampled contourlet transform. Signal Process. 2009, 89, 1334–1346. [Google Scholar] [CrossRef]
- Li, H.; Manjunath, B.S.; Mitra, S.K. Multisensor image fusion using the wavelet transform. Graph. Models Image Process. 1995, 57, 235–245. [Google Scholar] [CrossRef]
- Klonus, S.; Ehlers, M. Image fusion using the Ehlers spectral characteristics preservation algorithm. GISci. Remote Sens. 2007, 44, 93–116. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image | E | SD | G | r | Dindex (%) |
|---|---|---|---|---|---|
| Stage I: Jointing stage | |||||
| Figure 3a | 7.74 | 60.14 | 9.64 | - | - |
| Figure 3b | 7.76 | 57.92 | 4.59 | - | - |
| Figure 3c | 7.82 | 63.93 | 10.06 | 0.926 | 23.7 |
| Figure 3d | 7.54 | 58.08 | 9.32 | 0.867 | 42.9 |
| Figure 3e | 7.77 | 57.92 | 9.34 | 0.878 | 55.6 |
| Stage II: Middle and late grain-filling stage | |||||
| Figure 4a | 7.85 | 61.31 | 11.45 | - | - |
| Figure 4b | 7.73 | 61.00 | 2.89 | - | - |
| Figure 4c | 7.86 | 66.74 | 11.38 | 0.921 | 25.9 |
| Figure 4d | 7.67 | 61.01 | 10.73 | 0.872 | 44.8 |
| Figure 4e | 7.67 | 51.51 | 10.93 | 0.897 | 55.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, J.; Zhou, C.; Zhao, J. Improvement of Wheat Growth Information by Fusing UAV Visible and Thermal Infrared Images. Agronomy 2022, 12, 2087. https://doi.org/10.3390/agronomy12092087
Yu J, Zhou C, Zhao J. Improvement of Wheat Growth Information by Fusing UAV Visible and Thermal Infrared Images. Agronomy. 2022; 12(9):2087. https://doi.org/10.3390/agronomy12092087
Chicago/Turabian StyleYu, Jun, Chengquan Zhou, and Jinling Zhao. 2022. "Improvement of Wheat Growth Information by Fusing UAV Visible and Thermal Infrared Images" Agronomy 12, no. 9: 2087. https://doi.org/10.3390/agronomy12092087