
Assessment of a Chain Mower Performance for Weed Control under Tree Rows in an Alley Cropping Farming System
 , , , ,
, , , ,  ,
,
Abstract
:1. Introduction
2. Materials and Methods
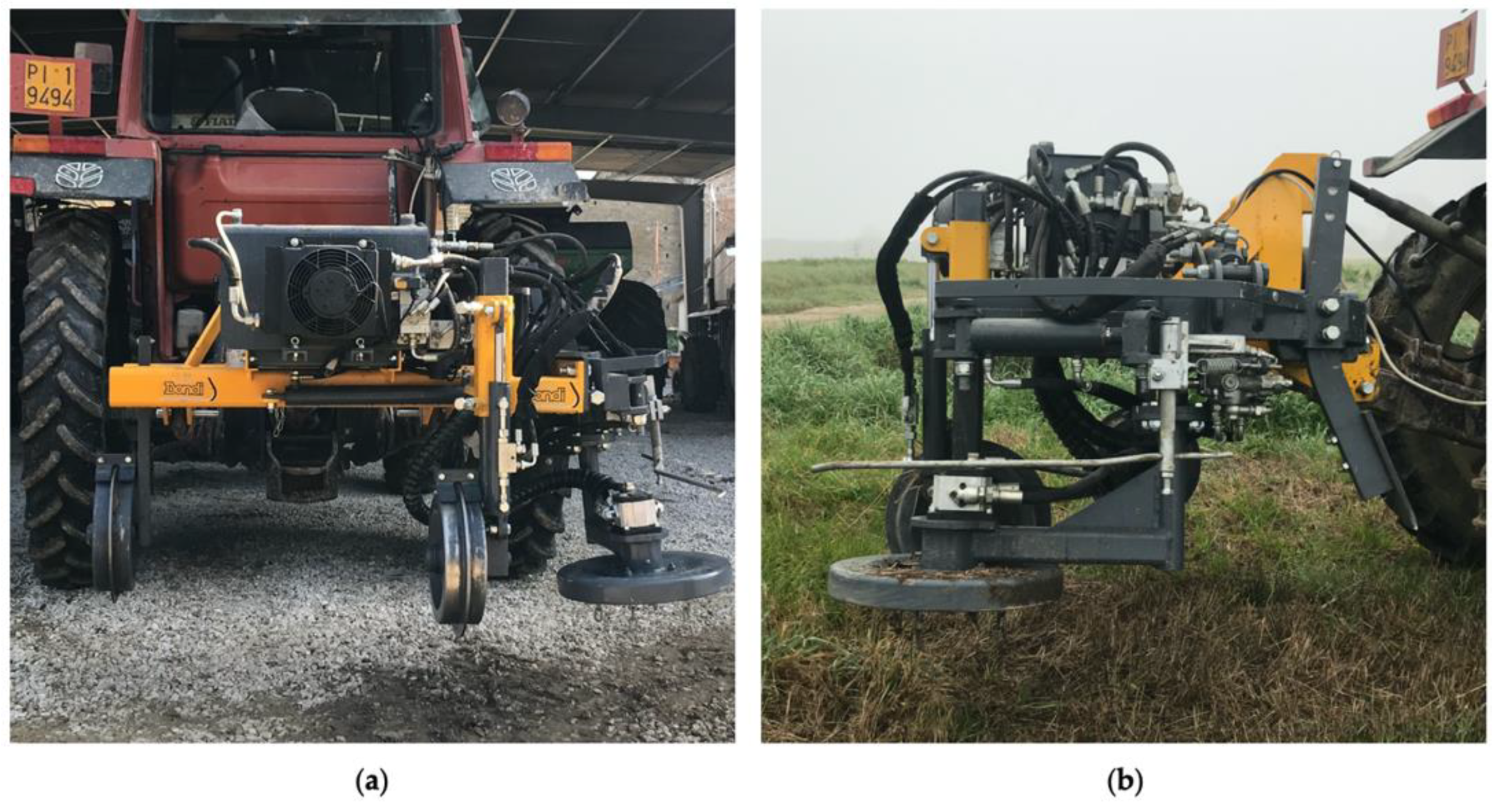
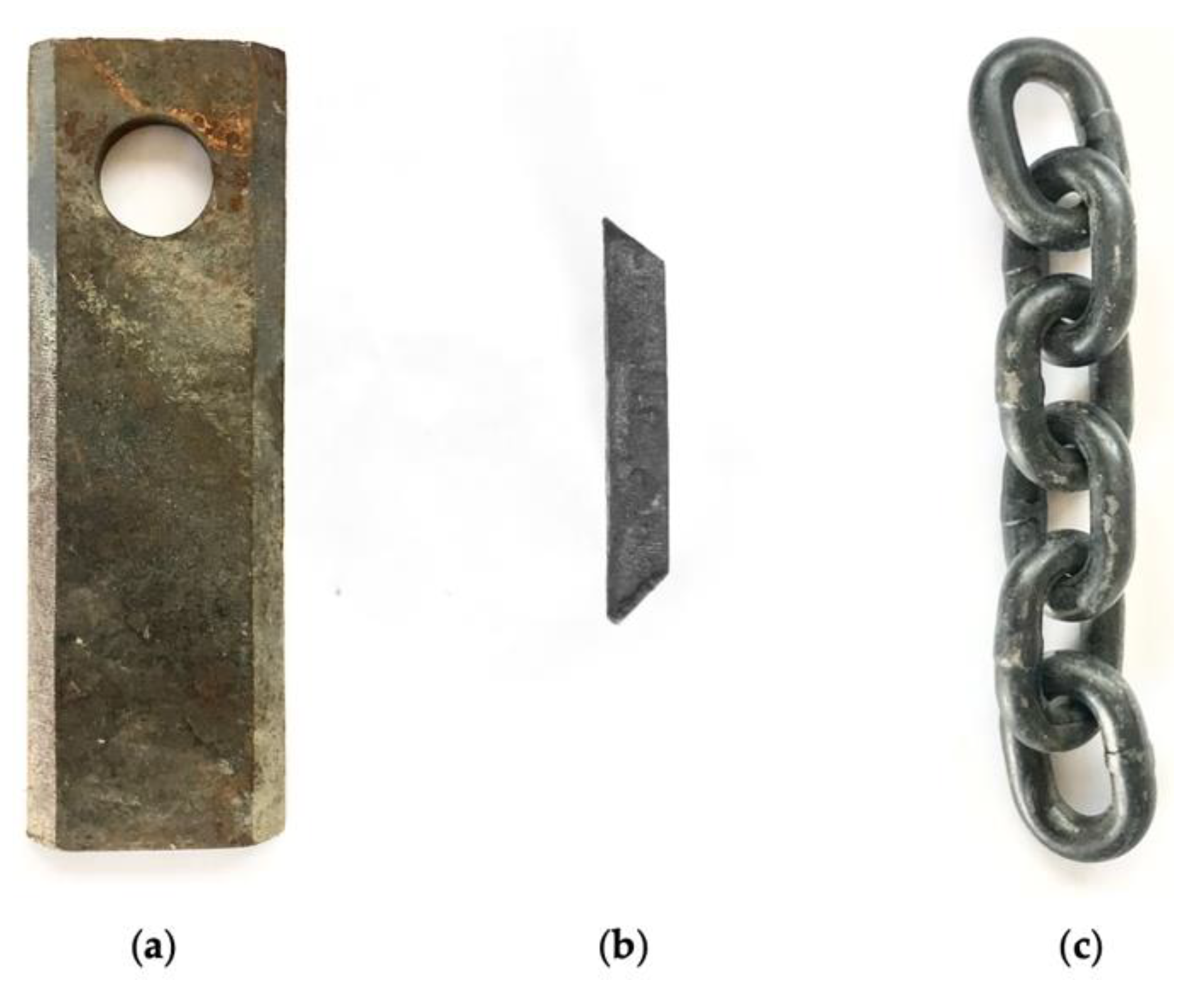
2.1. The Mowing Machine
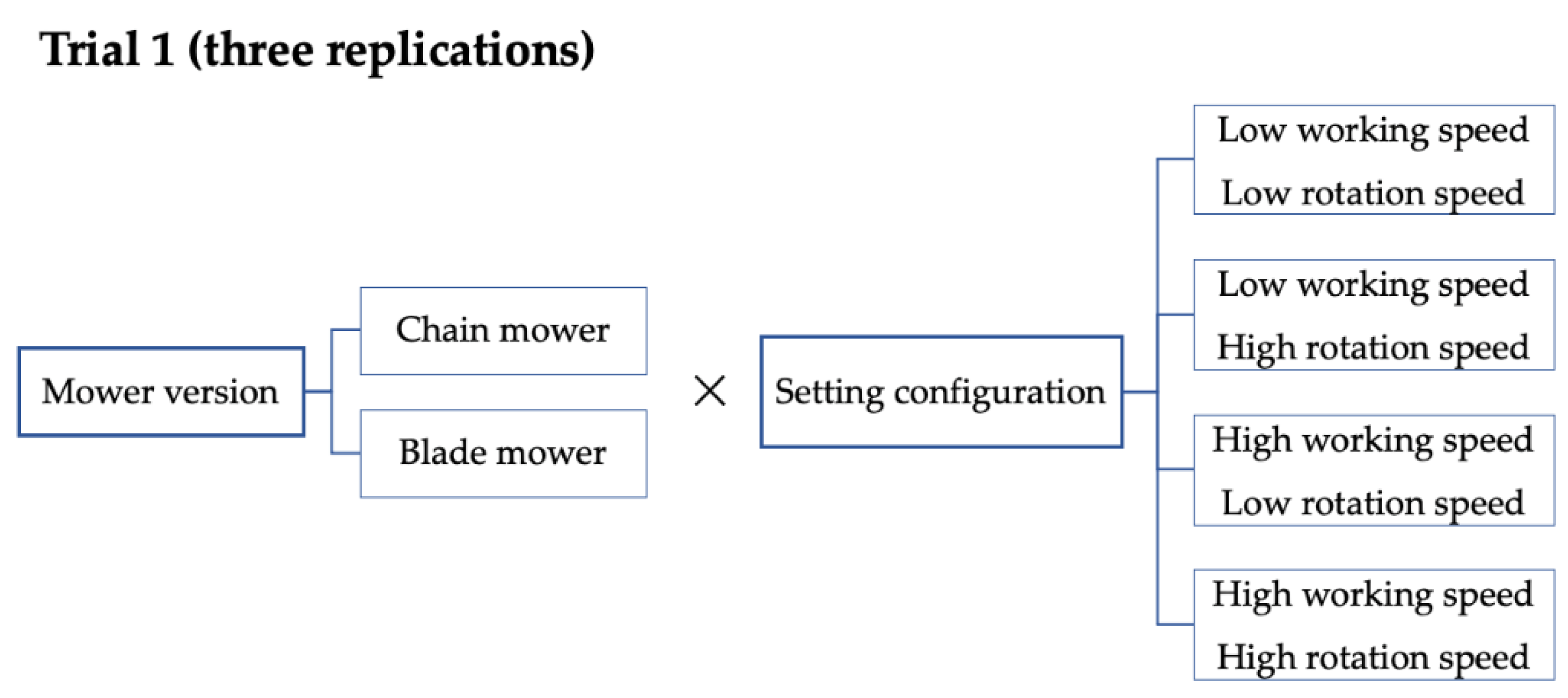
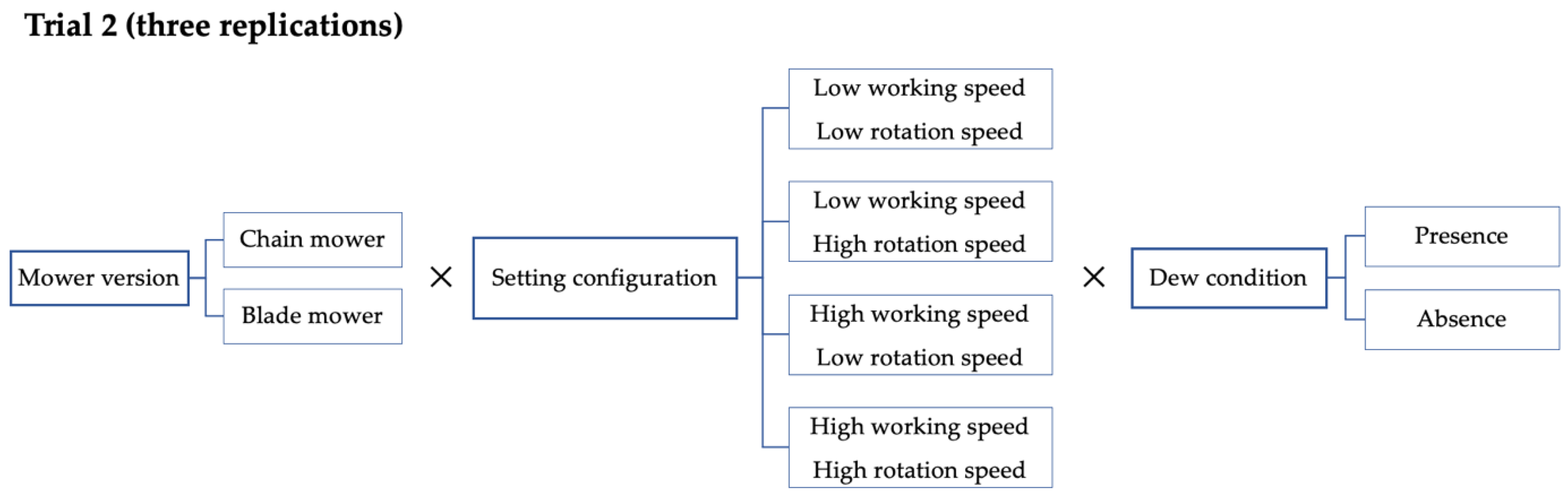
2.2. Experiment Layout
2.3. Data Collection
2.4. Statistical Analysis
3. Results
3.1. First Trial: Performances of the Two Mower Versions in the Open Field
3.1.1. ANOVA Analysis Results
3.1.2. Differences between the Two Mower Versions’ Performance
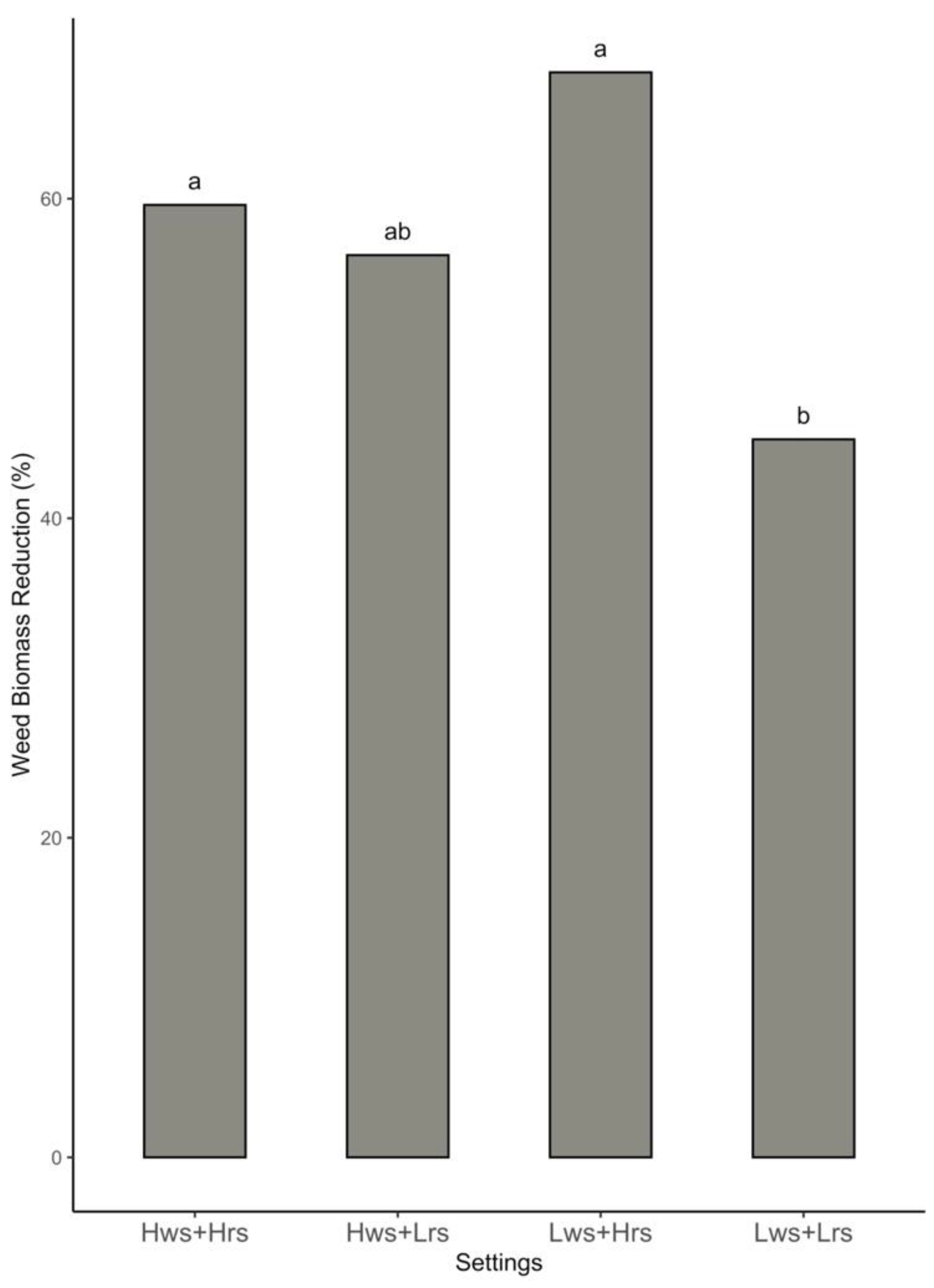
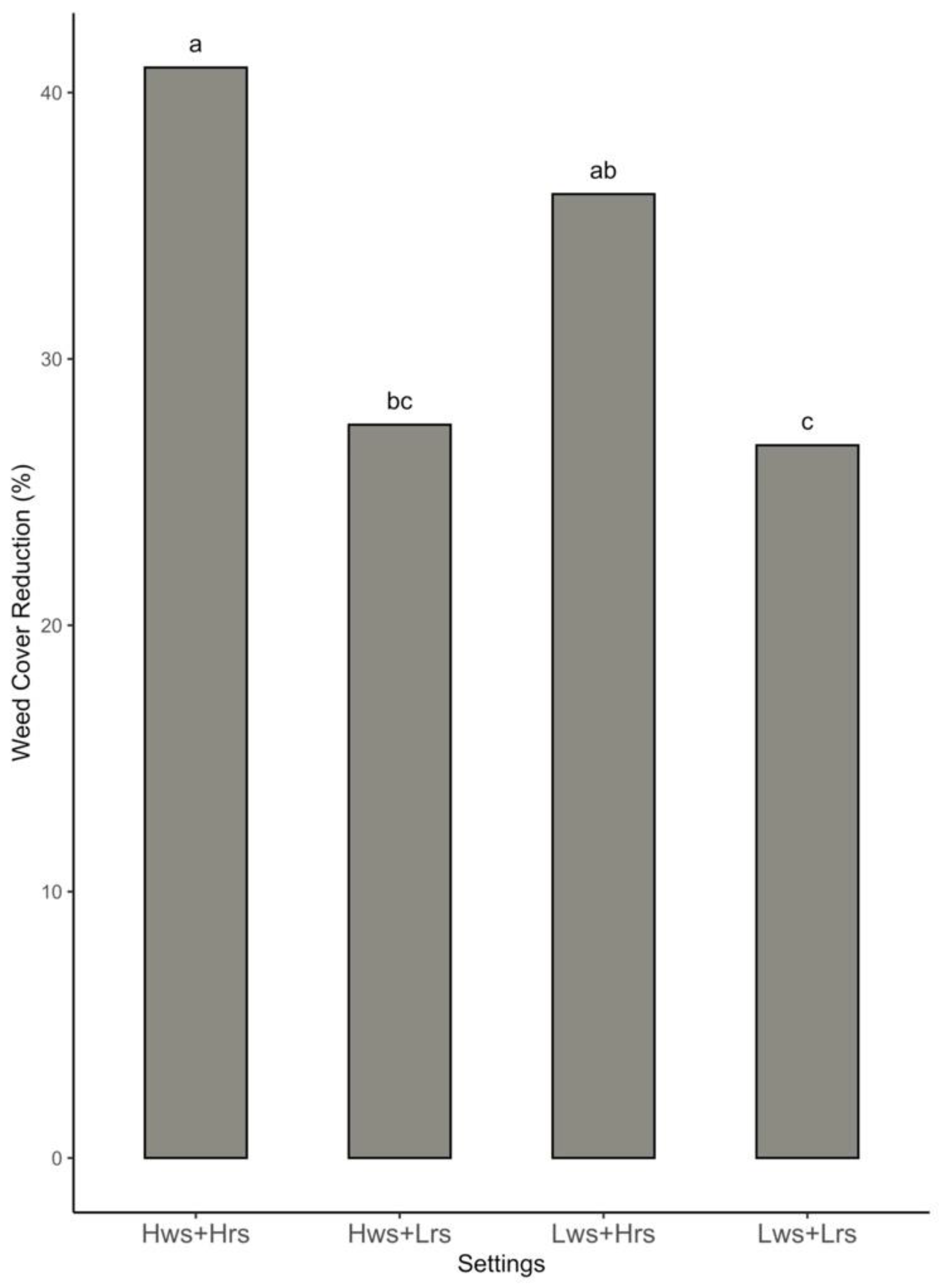
3.1.3. Setting Configuration Effect on Mowing Performance
3.2. Second Trial: Performance of the Two Mower Versions in the Alley Cropping Farming System
3.2.1. ANOVA Analysis Results
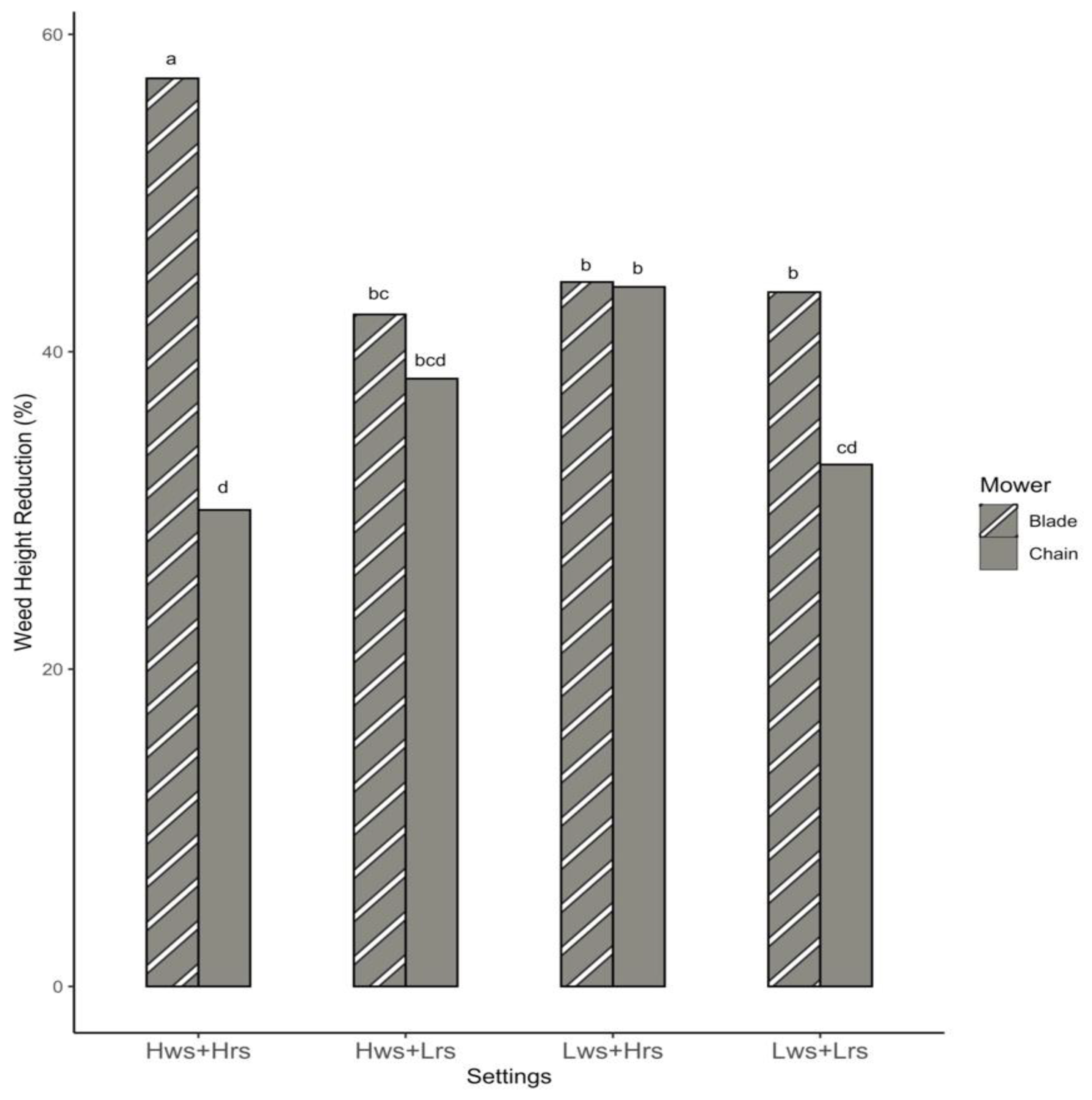
3.2.2. Differences between the Two Mower Versions’ Performance
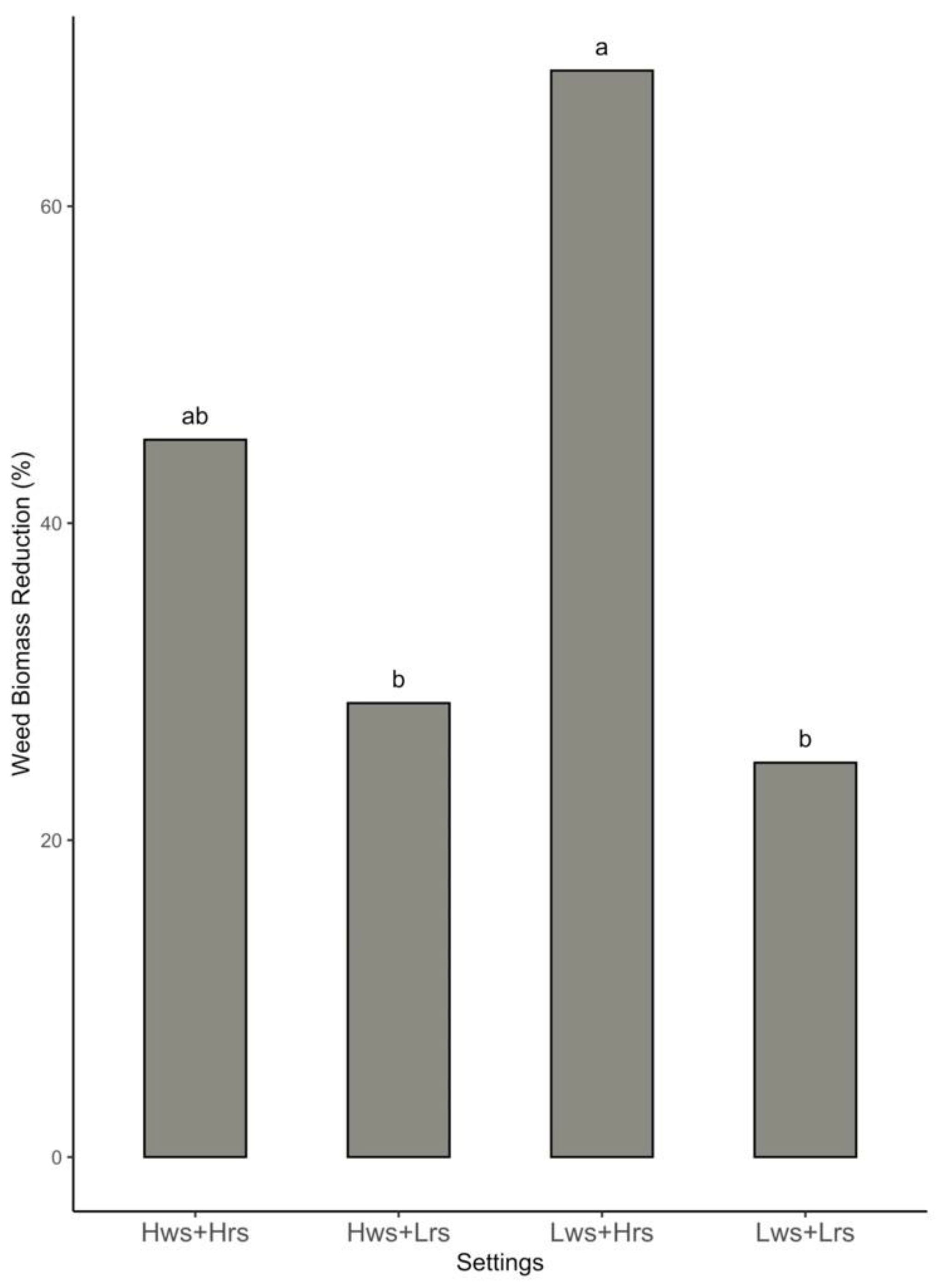
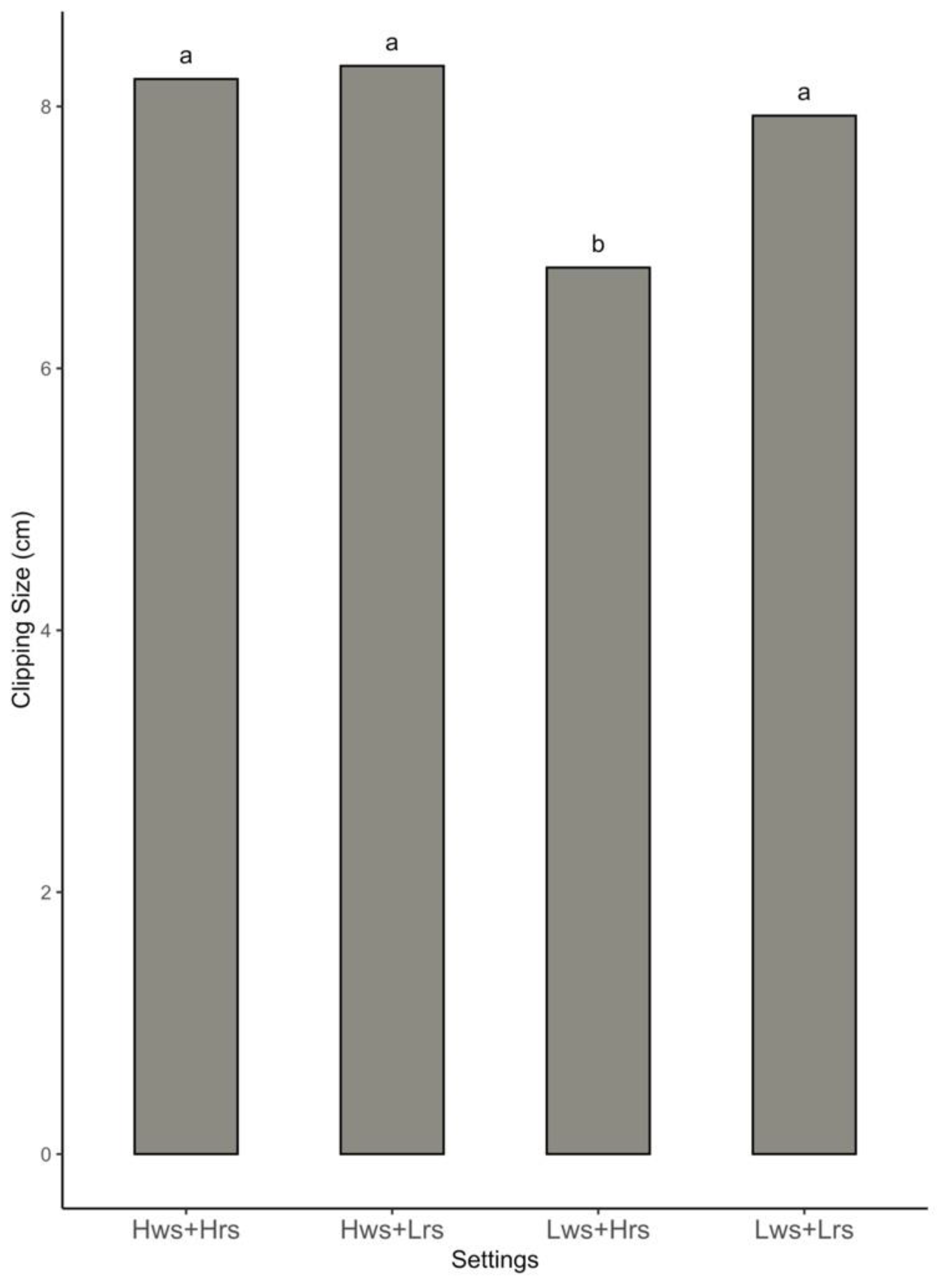
3.2.3. Setting Configuration Effect on Mowing Performance
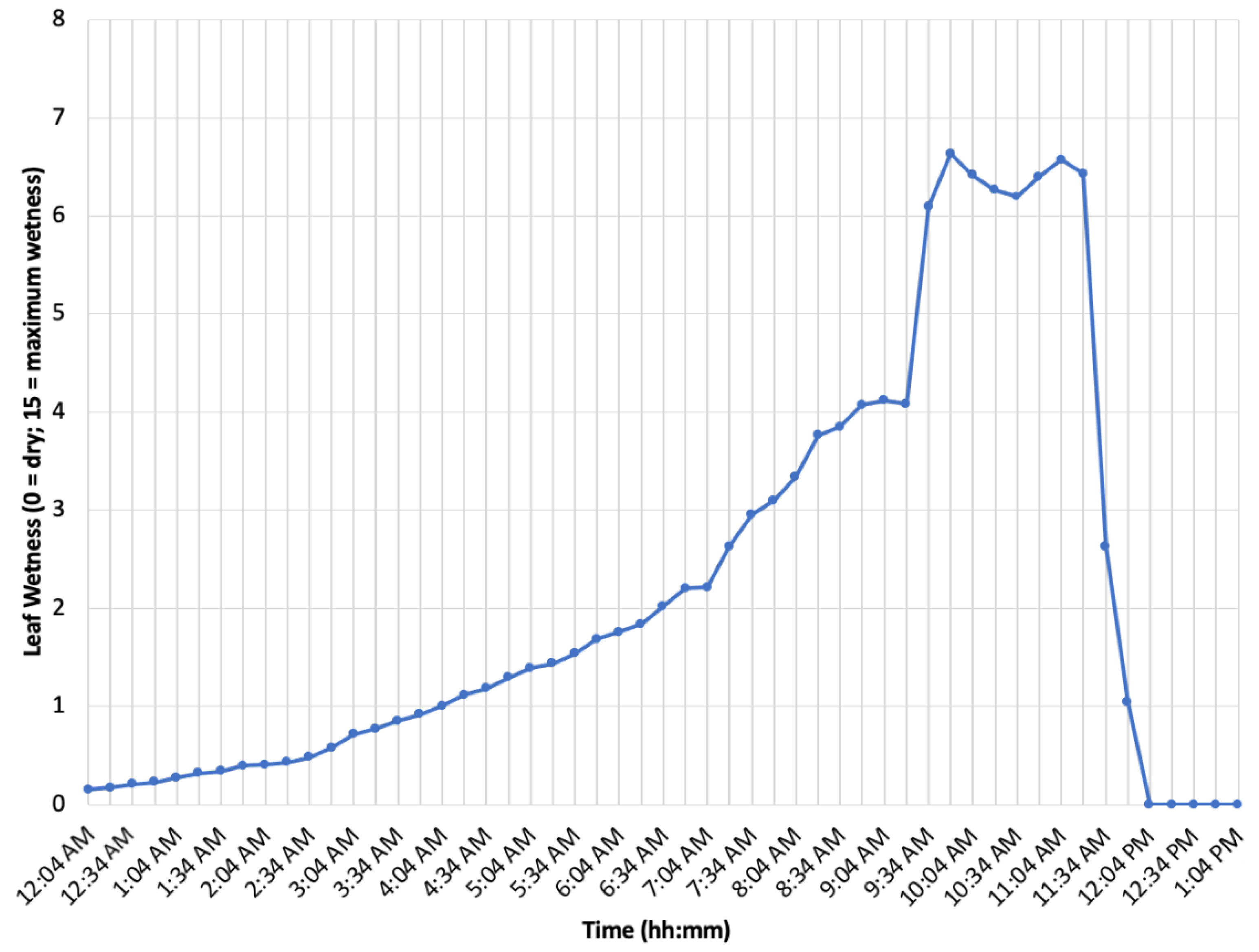
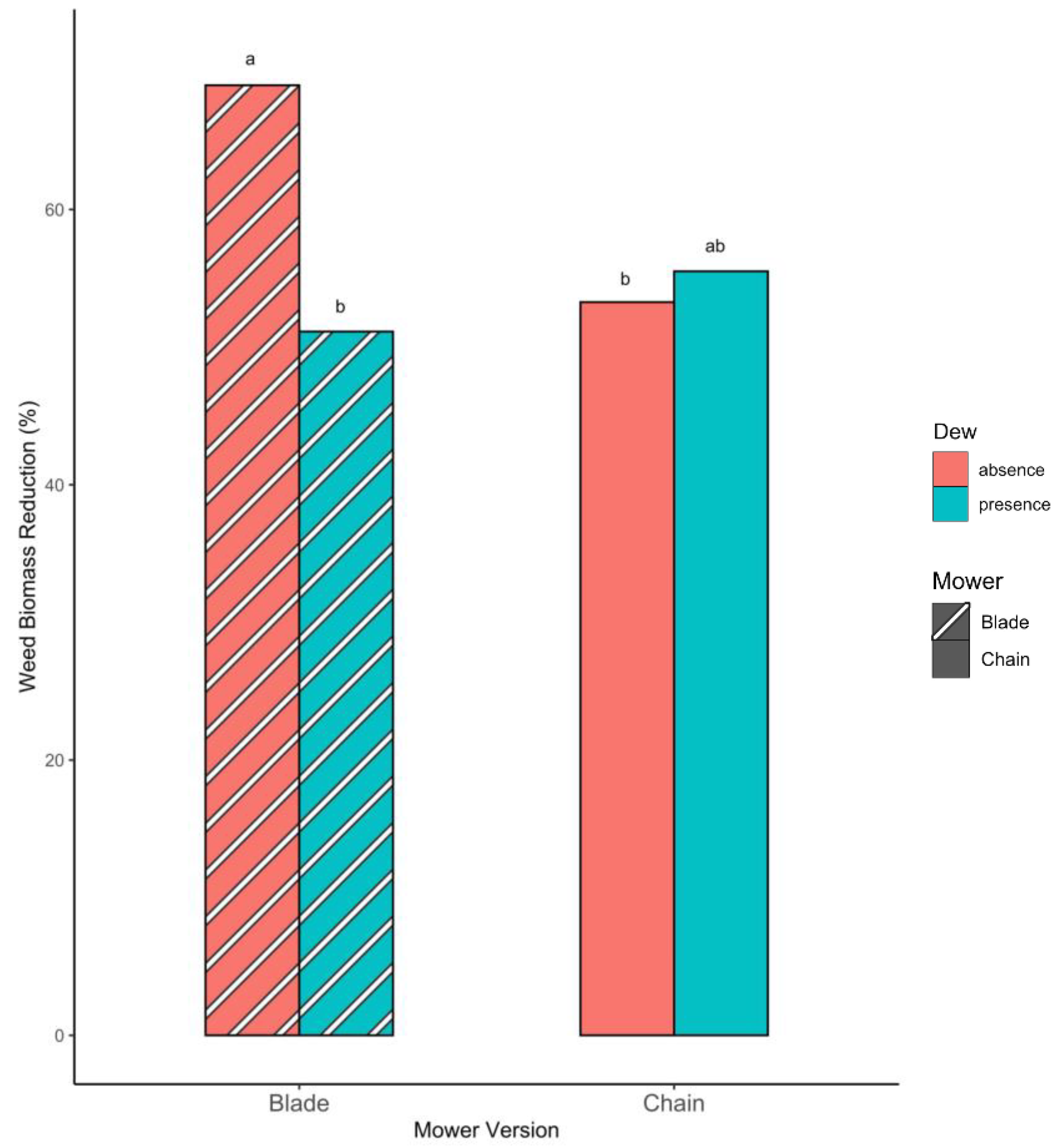
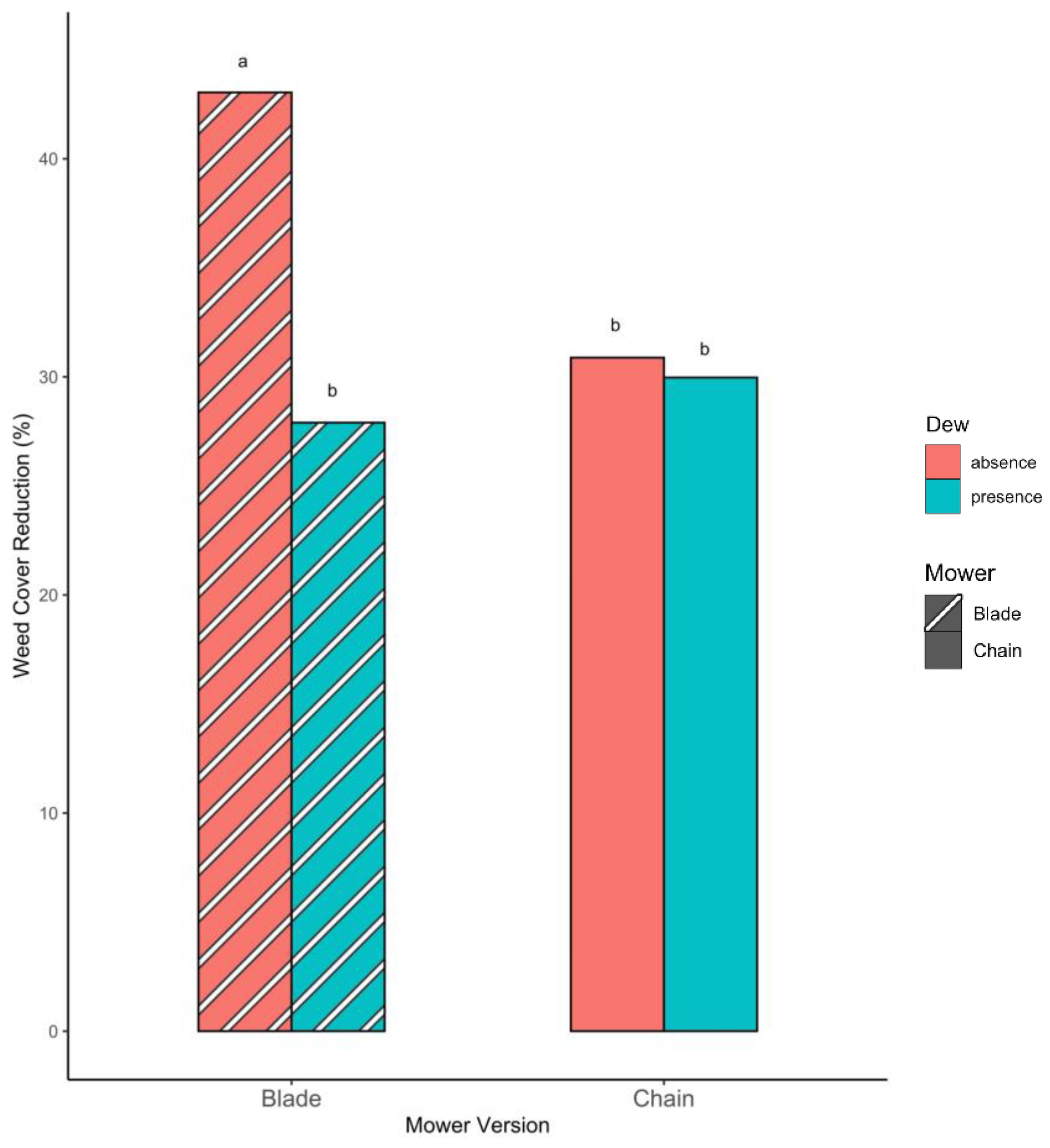
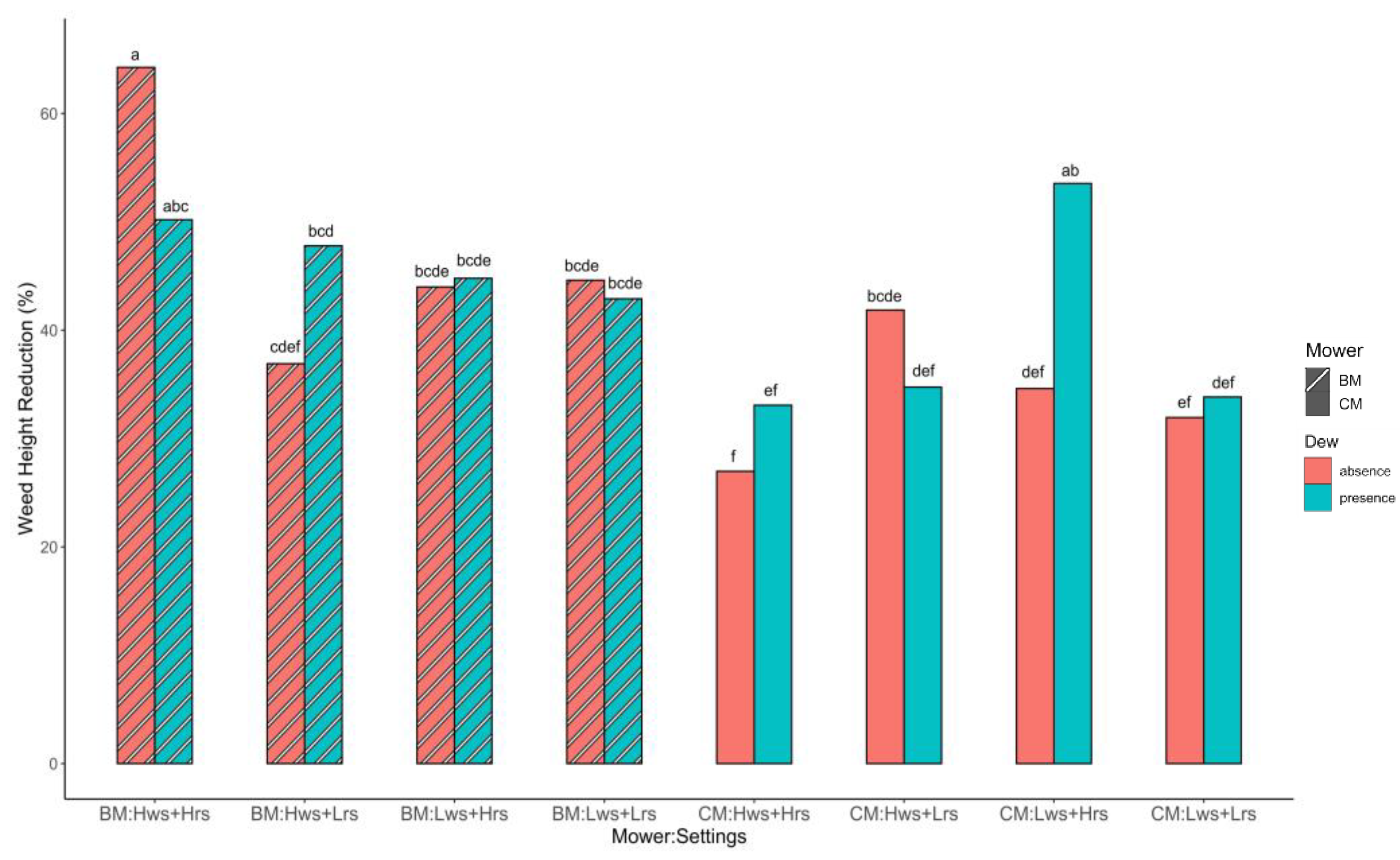
3.2.4. Effect of Dew Conditions on Mowing Performances
3.3. Field Capacity with Different Working Speed Settings
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Velten, S.; Leventon, J.; Jager, N.; Newig, J. What Is Sustainable Agriculture? A Systematic Review. Sustainability 2015, 7, 7833–7865. [Google Scholar] [CrossRef] [Green Version]
- Sarri, D.; Lombardo, S.; Pagliai, A.; Perna, C.; Lisci, R.; De Pascale, V.; Rimediotti, M.; Cencini, G.; Vieri, M. Smart Farming Introduction in Wine Farms: A Systematic Review and a New Proposal. Sustainability 2020, 12, 7191. [Google Scholar] [CrossRef]
- Vieri, M.; Lisci, R.; Rimediotti, M.; Sarri, D. The RHEA-Project Robot for Tree Crops Pesticide Application. J. Agric. Eng. 2013, 44, 359–362. [Google Scholar] [CrossRef]
- USDA Agroforestry. Available online: https://www.usda.gov/topics/forestry/agroforestry (accessed on 26 April 2022).
- FAO Agroforestry. Available online: https://www.fao.org/forestry/agroforestry/80338/en/#:~:text=Definition,spatial%20arrangement%20or%20temporal%20sequence (accessed on 26 April 2022).
- Hallema, D.W.; Rousseau, A.N.; Gumiere, S.J.; Périard, Y.; Hiemstra, P.H.; Bouttier, L.; Fossey, M.; Paquette, A.; Cogliastro, A.; Olivier, A. Framework for Studying the Hydrological Impact of Climate Change in an Alley Cropping System. J. Hydrol. 2014, 517, 547–556. [Google Scholar] [CrossRef]
- Biswas, B.; Chakraborty, D.; Timsina, J.; Bhowmick, U.R.; Dhara, P.K.; Ghosh (Lkn), D.K.; Sarkar, A.; Mondal, M.; Adhikary, S.; Kanthal, S.; et al. Agroforestry Offers Multiple Ecosystem Services in Degraded Lateritic Soils. J. Clean. Prod. 2022, 365, 132768. [Google Scholar] [CrossRef]
- Wezel, A.; Casagrande, M.; Celette, F.; Vian, J.-F.; Ferrer, A.; Peigné, J. Agroecological Practices for Sustainable Agriculture. A Review. Agron. Sustain. Dev. 2014, 34, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Schroeder, W.R. Planting and Establishment of Shelterbelts in Humid Severe-Winter Regions. Agric. Ecosyst. Environ. 1988, 22/23, 441–463. [Google Scholar] [CrossRef]
- Gulden, R.H.; Shirtliffe, S.J. Weed Seed Banks: Biology and Management. Prairie Soils Crops J. 2009, 2, 46–52. [Google Scholar]
- Lauer, D.K.; Glover, G.R. Stand Level Pine Response to Occupancy of Woody Shrub and Herbaceous Vegetation. Can. J. For. Res. 1999, 29, 979–984. [Google Scholar] [CrossRef]
- Schroeder, W.R.; Naeem, H. Effect of Weed Control Methods on Growth of Five Temperate Agroforestry Tree Species in Saskatchewan. For. Chron. 2017, 93, 271–281. [Google Scholar] [CrossRef] [Green Version]
- Boinot, S.; Fried, G.; Storkey, J.; Metcalfe, H.; Barkaoui, K.; Lauri, P.É.; Mézière, D. Alley Cropping Agroforestry Systems: Reservoirs for Weeds or Refugia for Plant Diversity? Agric. Ecosyst. Environ. 2019, 284, 106584. [Google Scholar] [CrossRef]
- Mézière, D.; Boinot, S.; de Waal, L.; Cadet, E.; Fried, G. Arable Weeds in Alley Cropping Agroforestry Systems—Results of a First Year Survey. In Proceedings of the 3rd European Agroforestry Conference, Montpellier SuperAgro, France, 23–25 May 2016. [Google Scholar]
- Burgess, P.; Incoll, L.D.; Hart, B.; Beaton, A.; Piper, R.W.; Seymour, I.; Reynolds, F.H.; Wright, C.; Pilbeam, D.J.; Graves, A.R. The Impact of Silvoarable Agroforestry with Poplar on Farm Profitability and Biological Diversity. Final Report to DEFRA; Cranfield University, University of Leeds, Royal Agricultural College: London, UK, 2003. [Google Scholar]
- Vityi, A.; Schettrer Péter, A.; Kiss-Sziget, N.; Marosvölgyi, B. I Benefici Della Pacciamatura con Biomassa Erbacea; AGFORWARD Agroforestry for Europe; European Union: Brussels, Belgium, 2017. [Google Scholar]
- Jones, A.; Fortier, J.; Gagnon, D.; Truax, B. Trading Tree Growth for Soil Degradation: Effects at 10 Years of Black Plastic Mulch on Fine Roots, Earthworms, Organic Matter and Nitrate in a Multi-Species Riparian Buffer. Trees For. People 2020, 2, 100032. [Google Scholar] [CrossRef]
- Ghouse, P. Mulching: Materials, Advantages and Crop Production. In Protected Cultivation and Smart Agriculture, 1st ed.; Maitra, S., Gaikwad, D.J., Shankar, T., Eds.; New Delhi Publishers: New Delhi, India, 2020; pp. 55–66. ISBN 978-81-948993-2-7. [Google Scholar]
- Hammermeister, A.M. Organic Weed Management in Perennial Fruits. Sci. Hortic. 2016, 208, 28–42. [Google Scholar] [CrossRef]
- Curran, W.S.; Lingenfelter, D.D.; Garling, L. An Introduction to Weed Management for Conservation Tillage Systems. Pennstate Coop. Ext. Coll. Agric. Sci. 2009, 2, 1–8. [Google Scholar]
- Sheley, R. Mowing to Manage Noxious Weeds. Montguide Mont. State Univ. Ext. 2017, 0517SA, 1–2. [Google Scholar]
- Chen, D.; Wang, Y.; Zhang, X.; Wei, X.; Duan, X.; Muhammad, S. Understory Mowing Controls Soil Drying in a Rainfed Jujube Agroforestry System in the Loess Plateau. Agric. Water Manag. 2021, 246, 106703. [Google Scholar] [CrossRef]
- Pergher, G.; Gubiani, R.; Mainardis, M. Field Testing of a Biomass-Fueled Flamer for In-Row Weed Control in the Vineyard. Agriculture 2019, 9, 210. [Google Scholar] [CrossRef] [Green Version]
- Vityi, A.; Marosvölgyi, B.; Kiss, A.; Schetterer, P. System Report: Alley Cropping in Hungary; AGFORWARD Agroforestry for Europe; European Union: Brussels, Belgium, 2015. [Google Scholar]
- Radbourne, A.; Reinsch, S.; Norris, D.; Critchley, W.; Studer, R.M. Alley Cropping—Agroforestry [France]. Available online: https://qcat.wocat.net/en/wocat/technologies/view/technologies_5645/ (accessed on 4 May 2022).
- Nobili BE Mulcher. Available online: https://www.nobili.com/be/sb0f2deee (accessed on 7 May 2022).
- Deleks Sideshift Flail Mower, Offset Side Mulcher for Tractors LEO-140. Available online: https://www.deleks.it/en/p/106/sideshift-flail-mower-offset-side-mulcher-for-tractors-deleks (accessed on 7 May 2022).
- McRandal, D.M.; McNulty, P.B. Impact Cutting Behaviour of Forage Crops I. Mathematical Models and Laboratory Tests. J. Agric. Eng. Res. 1978, 23, 313–328. [Google Scholar] [CrossRef]
- Yiljep, Y.D.; Mohammed, U.S. Effect of Knife Velocity on Cutting Energy and Efficiency during Impact Cutting of Sorghum Stalk. Agric. Eng. Int. CIGR E J. 2005, 7, 1–10. [Google Scholar]
- Lei, X.; Qi, Y.; Zeng, J.; Yuan, Q.; Chang, Y.; Lyu, X. Development of Unilateral Obstacle-Avoiding Mower for Y-Trellis Pear Orchard. Int. J. Agric. Biol. Eng. 2022, 15, 71–78. [Google Scholar] [CrossRef]
- Stanisavljević, R.; Vuković, A.; Petrović, D.V.; Radojević, R.L.; Barać, S.; Mileusnić, Z.; Tadić, V. Efficiency of Alfalfa Hay Mowing Machines under the Dryland Conditions. Teh. Vjesn. Tech. Gaz. 2021, 28, 1503–1510. [Google Scholar] [CrossRef]
- Bertucci, M.; Boyd, J.; Patton, A. Mowing Your Lawn. Div. Agric. Res. Ext. Univ. Ark. Syst. 2018, FSA6023, 1–6. [Google Scholar]
- Fransgard Chain Mower FKR Series. Available online: https://www.fransgard.dk/en-gb/gt210/fkr-150 (accessed on 9 May 2022).
- Wessex International Forestry Rotary Cutter SM-66. Available online: https://www.wessexintl.com/machines/compact-tractor-attachments/rotary-slasher/sm-66/ (accessed on 9 May 2022).
- Ventura Forestry Machines DLB 410—DADU—Side Belt Mower. Available online: https://www.venturamaq.com/en/mowers-of-blades-and-chains/dlb-410-dadu-side-belt-mower/ (accessed on 9 May 2022).
- Kellfri Chain Mulcher Three-Point Linkage. Available online: https://www.kellfri.com/agriculture/grassland-machinery/chain-mulchers/chain-mulcher-three-point-linkage (accessed on 9 May 2022).
- Patrignani, A.; Ochsner, T.E. Canopeo: A Powerful New Tool for Measuring Fractional Green Canopy Cover. Agron. J. 2015, 107, 2312–2320. [Google Scholar] [CrossRef] [Green Version]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2021. [Google Scholar]
- de Mendiburu, F. Agricolae: Statistical Procedures for Agricultural Research; R Package Version 1.3-5; 2021; Available online: https://cran.r-project.org/web//packages/agricolae/agricolae.pdf (accessed on 14 September 2022).
- Limberger, F.W. Grass Trimmer. U.S. Patent 2,676,448, Filed 11 September 1950, and Issued 27 April 1954. Available online: https://www.freepatentsonline.com/2676448.pdf (accessed on 14 September 2022).
- Guerra, B.; Steenwerth, K. Influence of Floor Management Technique on Grapevine Growth, Disease Pressure, and Juice and Wine Composition: A Review. Am. J. Enol. Vitic. 2012, 63, 149–164. [Google Scholar] [CrossRef]
- Beard, J.B. Turfgrass: Science and Culture, 1st ed.; Prentice Hall. Inc.: Engelwood Cliffs, NJ, USA, 1973. [Google Scholar]
- Steinegger, D.H.; Shearman, R.C.; Riordan, T.P.; Kinbacher, E.J. Mower Blade Sharpness Effects on Turf. Agron. J. 1983, 75, 479–480. [Google Scholar]
- Tolosana, E.; Bados, R.; Laina, R.; Bacescu, N.M.; de la Fuente, T. Forest Biomass Collection from Systematic Mulching on Post-Fire Pine Regeneration with BioBaler WB55: Productivity, Cost and Comparison with a Conventional Treatment. Forests 2021, 12, 979. [Google Scholar] [CrossRef]
- Jahr, A.; Bongartz, R.; Sim, H.; Pillmann, A. A Novel Test Method to Determine the Wear Resistance of Agricultural Cutting Tools with an Analyzing Method Based on an Ellipse-Fit Algorithm. In Proceedings of the European Symposium on Friction, Wear, and Wear Protection, Karlsruhe, Germany, 6–8 May 2014. [Google Scholar]
- Kakahy, A.N.N.; Ahmad, D.; Akhir, M.D.; Sulaiman, S.; Ishak, A. Effects of Rotary Mower Blade Cutting Angles on the Pulverization of Sweet Potato Vine. In Proceedings of the 2nd International Conference on Agricultural and Food Engineering, CAFEi2014, Kuala Lumpur, Malaysia, 1–3 December 2014. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Chain * | Blade * | |
|---|---|---|---|
| Mass | g | 94.3 | 397.6 |
| Length | mm | 118 | 151 |
| Width | mm | 21 | 51 |
| Thickness ** | mm | 6 | 8 |
| Settings | Working Speed (ws) | Rotation Speed (rs) | ||
|---|---|---|---|---|
| Lws + Lrs | km·h−1 | 1.6 | rpm | 1830 |
| Lws + Hrs | km·h−1 | 1.6 | rpm | 2500 |
| Hws + Lrs | km·h−1 | 2.4 | rpm | 1830 |
| Hws + Hrs | km·h−1 | 2.4 | rpm | 2500 |
| Factors | WBR (%) | WCR (%) | WHR (%) | CS (cm) | WBRg (%) | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| F-Value | p-Value | F-Value | p-Value | F-Value | p-Value | F-Value | p-Value | F-Value | p-Value | |
| Mower Version | 0.043 | 0.839 | 20.280 | *** | 0.068 | 0.795 | 12.555 | *** | 0.605 | 0.450 |
| Setting Configuration | 6.585 | ** | 0.888 | 0.453 | 2.446 | 0.073 | 2.763 | * | 0.355 | 0.787 |
| Mower Version ´ Setting Configuration | 0.454 | 0.718 | 0.293 | 0.830 | 2.140 | 0.105 | 1.681 | 0.174 | 0.468 | 0.709 |
| Nr. Observations | Values (SE) | ||
|---|---|---|---|
| Weed Biomass | 24 | g d.m.·m−2 | 133.88 (7.78) |
| Weed Cover | 72 | % | 45.7 (1.3) |
| Weed Height | 72 | cm | 13.86 (0.28) |
| Factors | WBR (%) | WCR (%) | WHR (%) | |||
|---|---|---|---|---|---|---|
| F-Value | p-Value | F-Value | p-Value | F-Value | p-Value | |
| Mower Version | 1.461 | 0.236 | 2.159 | 0.144 | 16.832 | *** |
| Setting Configuration | 4.077 | * | 4.566 | ** | 1.169 | 0.324 |
| Dew | 2.760 | 0.107 | 7.042 | ** | 0.580 | 0.448 |
| Mower Version ´ Setting Configuration | 0.523 | 0.670 | 0.514 | 0.673 | 5.297 | ** |
| Mower Version ´ Dew | 4.564 | * | 5.258 | * | 1.337 | 0.250 |
| Setting Configuration ´ Dew | 2.027 | 0.131 | 1.543 | 0.207 | 1.264 | 0.290 |
| Mower Version ´ Setting Configuration ´ Dew | 0.305 | 0.822 | 2.054 | 0.110 | 2.897 | * |
| Nr. Observations | Values (SE) | ||
|---|---|---|---|
| Weed Biomass | 48 | g d.m.·m−2 | 205.49 (12.79) |
| Weed Cover | 144 | % | 50.8 (1.4) |
| Weed Height | 144 | cm | 15.54 (0.31) |
| Low Working Speed (Lws) | High Working Speed (Hws) | ||
|---|---|---|---|
| Performance | |||
| Working speed | km·h−1 | 1.60 | 2.40 |
| Working width | m | 9.00 | 9.00 |
| Theoretical field capacity | ha·h−1 | 1.44 | 2.16 |
| Theoretical field time * | h·ha−1 | 0.69 | 0.46 |
| Total turning time * | h·ha−1 | 0.02 | 0.02 |
| Field time ** | h·ha−1 | 0.71 | 0.48 |
| Field capacity ** | ha·h−1 | 1.40 | 2.07 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gagliardi, L.; Fontanelli, M.; Frasconi, C.; Sportelli, M.; Antichi, D.; Tramacere, L.G.; Rallo, G.; Peruzzi, A.; Raffaelli, M. Assessment of a Chain Mower Performance for Weed Control under Tree Rows in an Alley Cropping Farming System. Agronomy 2022, 12, 2785. https://doi.org/10.3390/agronomy12112785
Gagliardi L, Fontanelli M, Frasconi C, Sportelli M, Antichi D, Tramacere LG, Rallo G, Peruzzi A, Raffaelli M. Assessment of a Chain Mower Performance for Weed Control under Tree Rows in an Alley Cropping Farming System. Agronomy. 2022; 12(11):2785. https://doi.org/10.3390/agronomy12112785
Chicago/Turabian StyleGagliardi, Lorenzo, Marco Fontanelli, Christian Frasconi, Mino Sportelli, Daniele Antichi, Lorenzo Gabriele Tramacere, Giovanni Rallo, Andrea Peruzzi, and Michele Raffaelli. 2022. "Assessment of a Chain Mower Performance for Weed Control under Tree Rows in an Alley Cropping Farming System" Agronomy 12, no. 11: 2785. https://doi.org/10.3390/agronomy12112785