Remotely Piloted Aircraft (RPA) in Agriculture: A Pursuit of Sustainability


Abstract
:1. Introduction
2. Remotely Piloted Aircraft (RPA)
2.1. Classification of RPAs
- (a)
- Autonomous: An autonomous RPA doesn’t need a human pilot to control it from the ground. It is guided by its own integrated sensors and systems.
- (b)
- Monitored: In this case, a human technician is needed. The job of this person is to provide information and control the feedback of the RPA. The drone directs its own flight plan and the technician can decide what action to take. This system is common in precision agriculture and photogrammetry work.
- (c)
- Supervised: It is piloted by an operator, although it can perform some tasks autonomously.
- (d)
- Preprogrammed: It follows a previously designed flight plan and there is no way to modify it to accommodate possible changes.
- (e)
- Remotely controlled (R/C): It is piloted directly by a technician through a console.
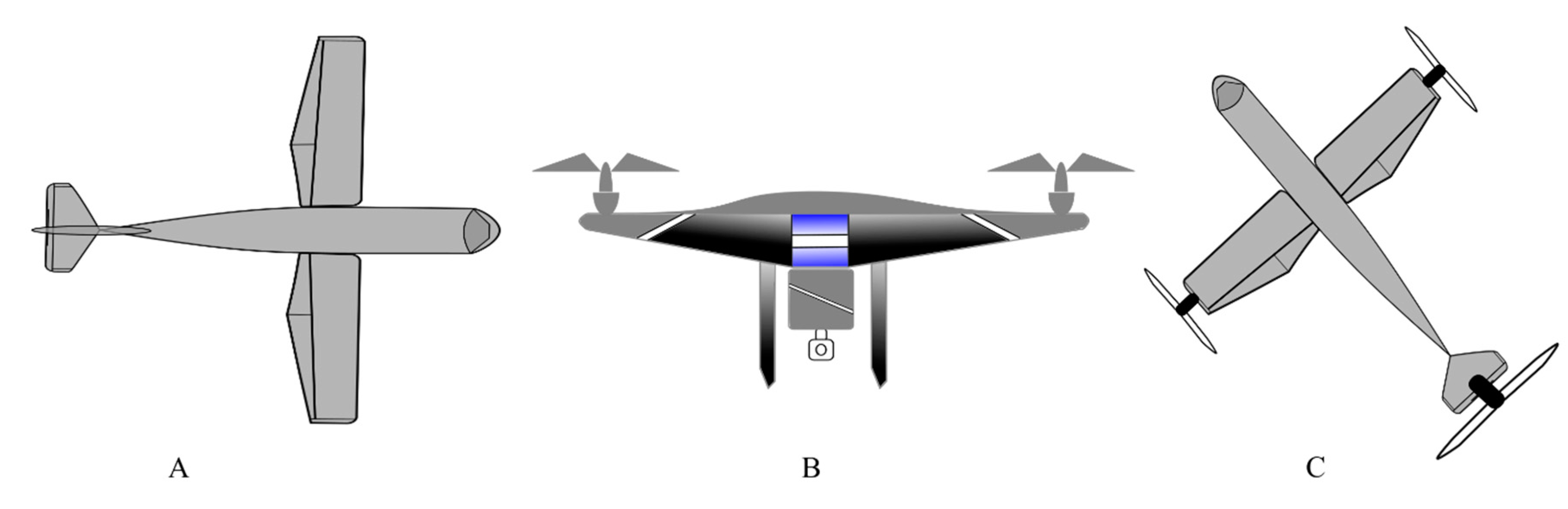
- Fixed wings and flying wings RPAs (having limited maneuverability) that use a jet engine for thrust and wings for lift, Figure 1A.
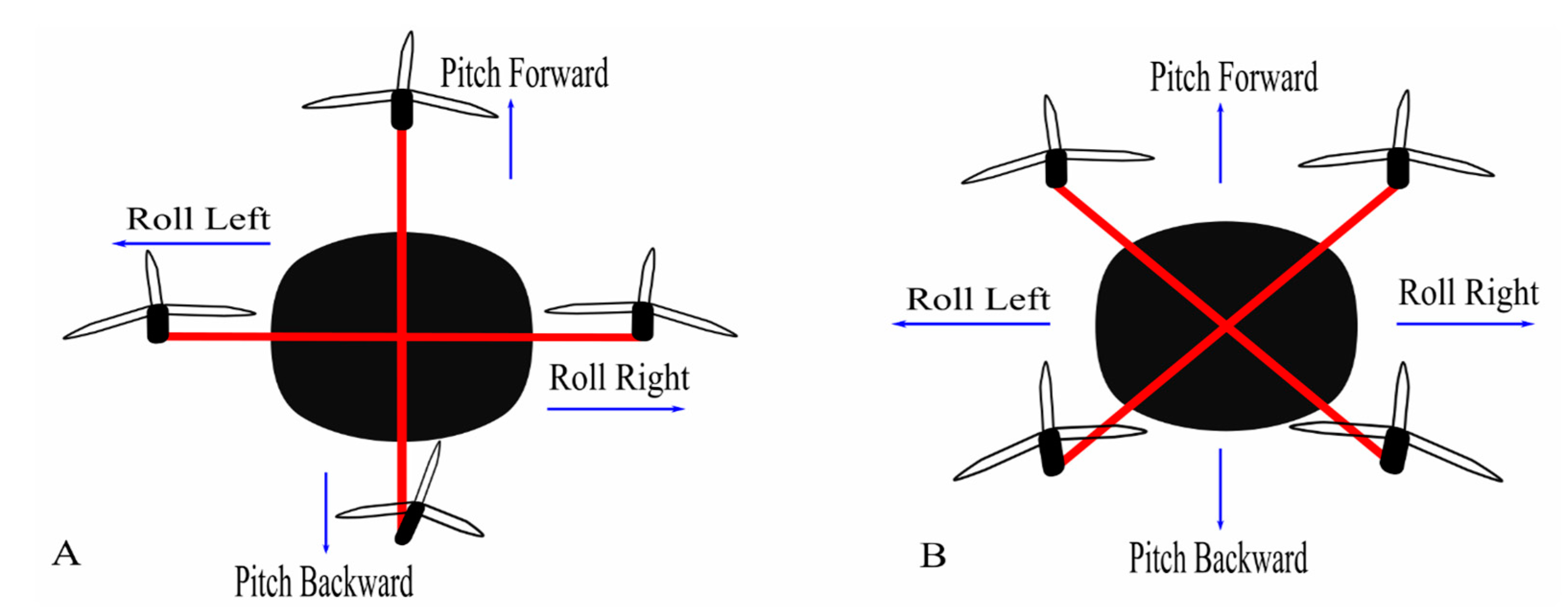
- Vertical take-off and landing (VTOL) RPAs (being very maneuverable) that use a rotor system for thrust and lift.
- Micro RPAs, as their name indicate of very small sizes i.e., in the range of centimeters. They may use either rotors or flapping wings for thrust and lift.
- Airships and parafoils (having lower maneuverability) that use balloons or parachutes for the flight.
- Novel concepts and combinations that could be based on the previous principles to obtain the desired benefits, Figure 1C.
2.2. Basic Architecture of an Agricultural RPA
- Frame
- Brush-less motors
- Electronic Speed Control (ESC) modules
- A control board
- An Inertial Navigation System (INS) and Global Navigation Satellite System (GNSS)
- Payload sensors (i.e., Light Detection and Ranging LiDAR systems, thermal camera, multispectral camera, RGB camera etc.) and altimeter (i.e., ultrasonic sensor, laser altimeter, barometer etc.)
- Transmitter and receiver modules
2.3. Choosing an Appropriate Drone
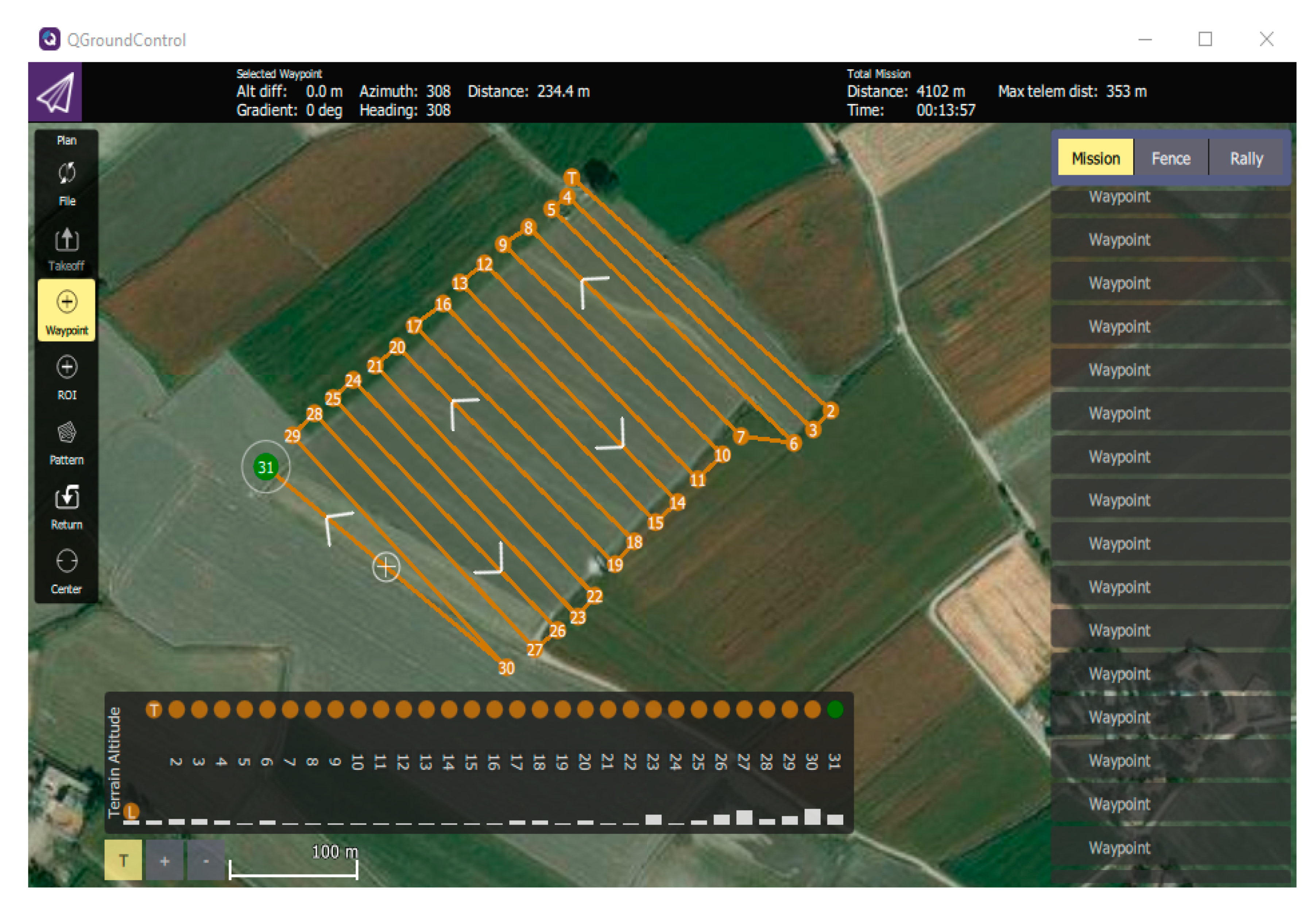
2.4. Flight Planning and Data Collection
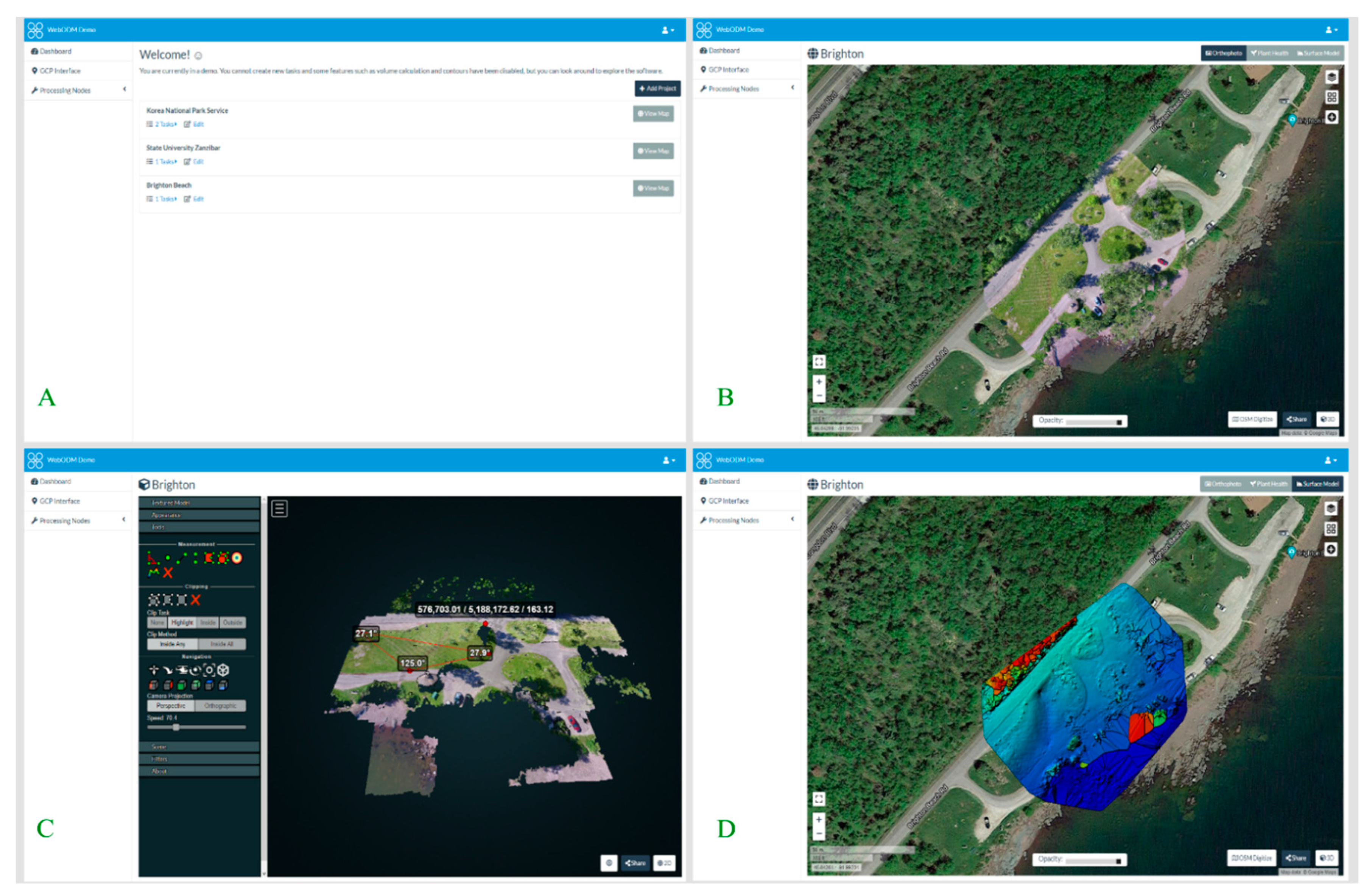
2.5. Image Processing and Software
3. Implementation of Drone Technology in Agriculture
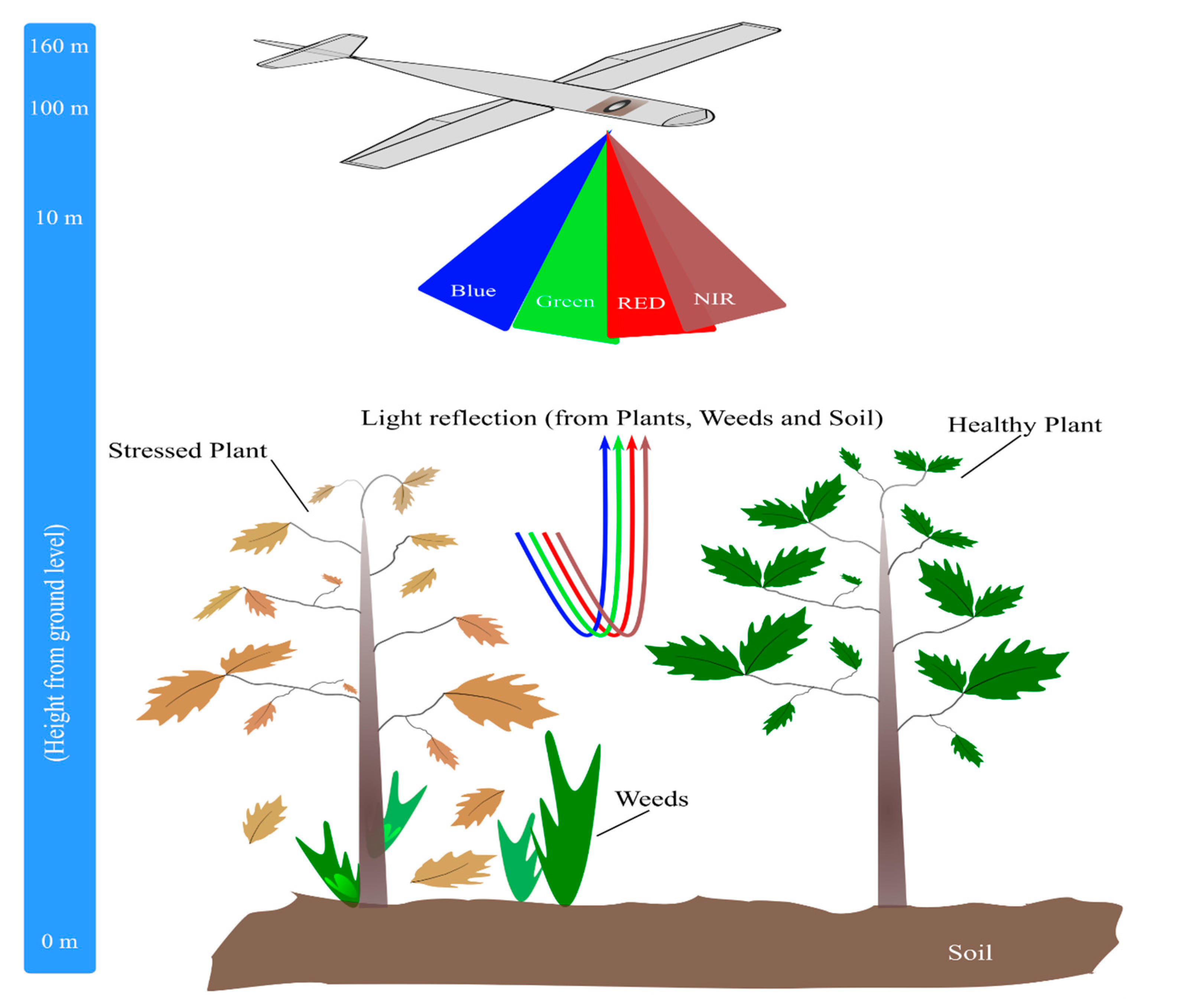
- (a)
- Thermal Infra-Red band
- (b)
- Red, Green, and Blue (RGB) bands
- (c)
- Near Infra-Red (NIR) band
- (d)
- Red Edge band (RE)
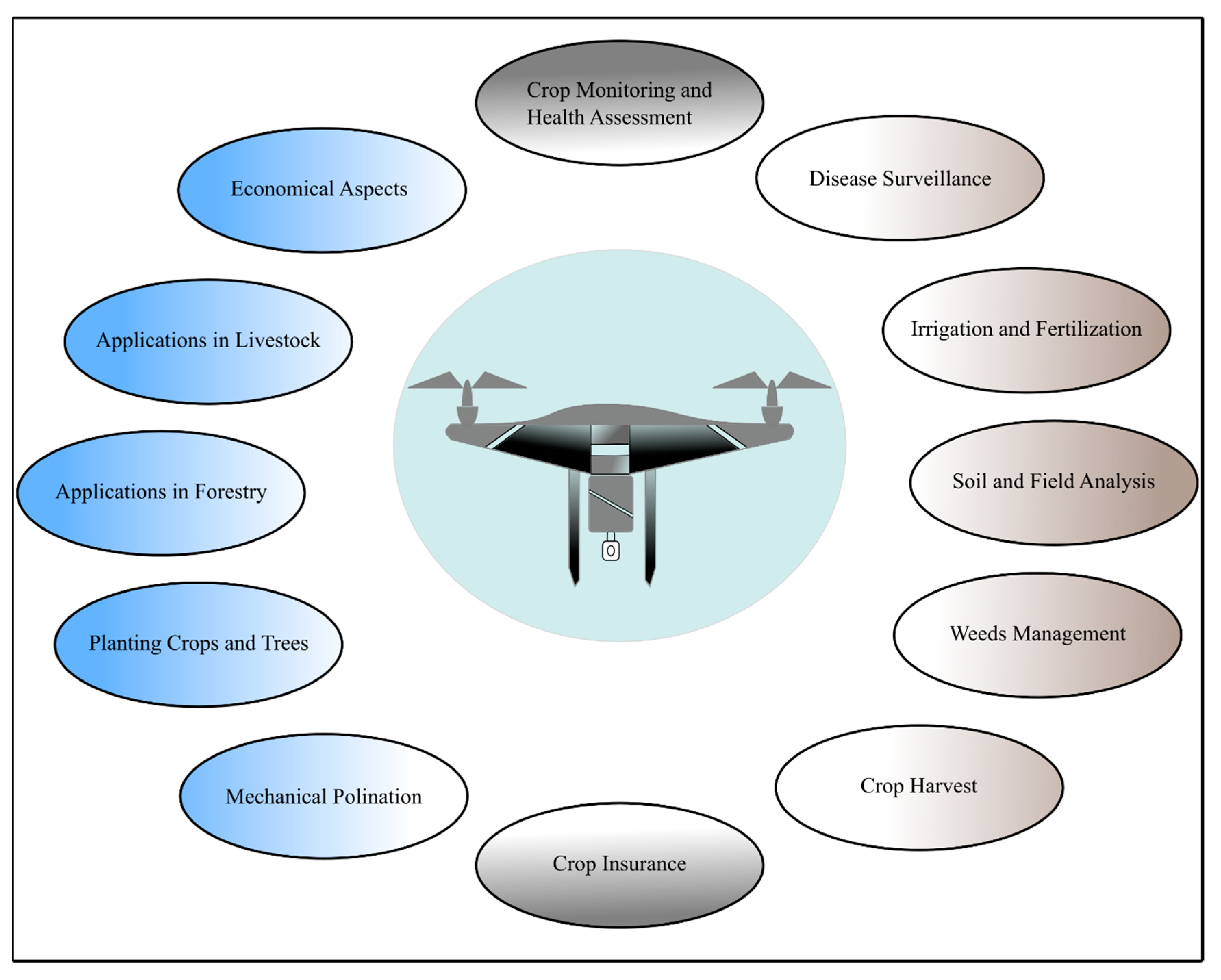
4. Applications of Drones in Farming
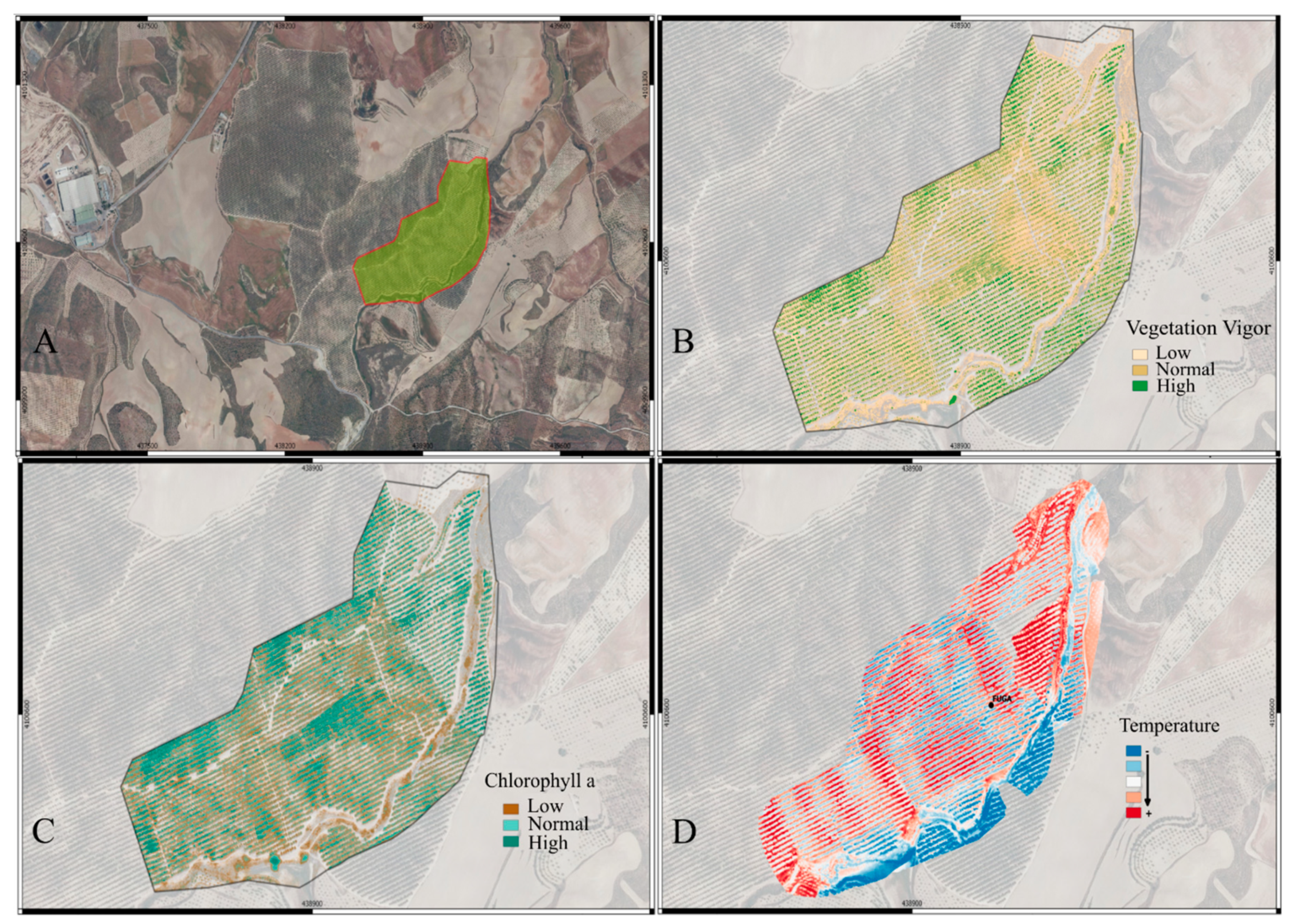
4.1. Crop Monitoring and Health Assessment
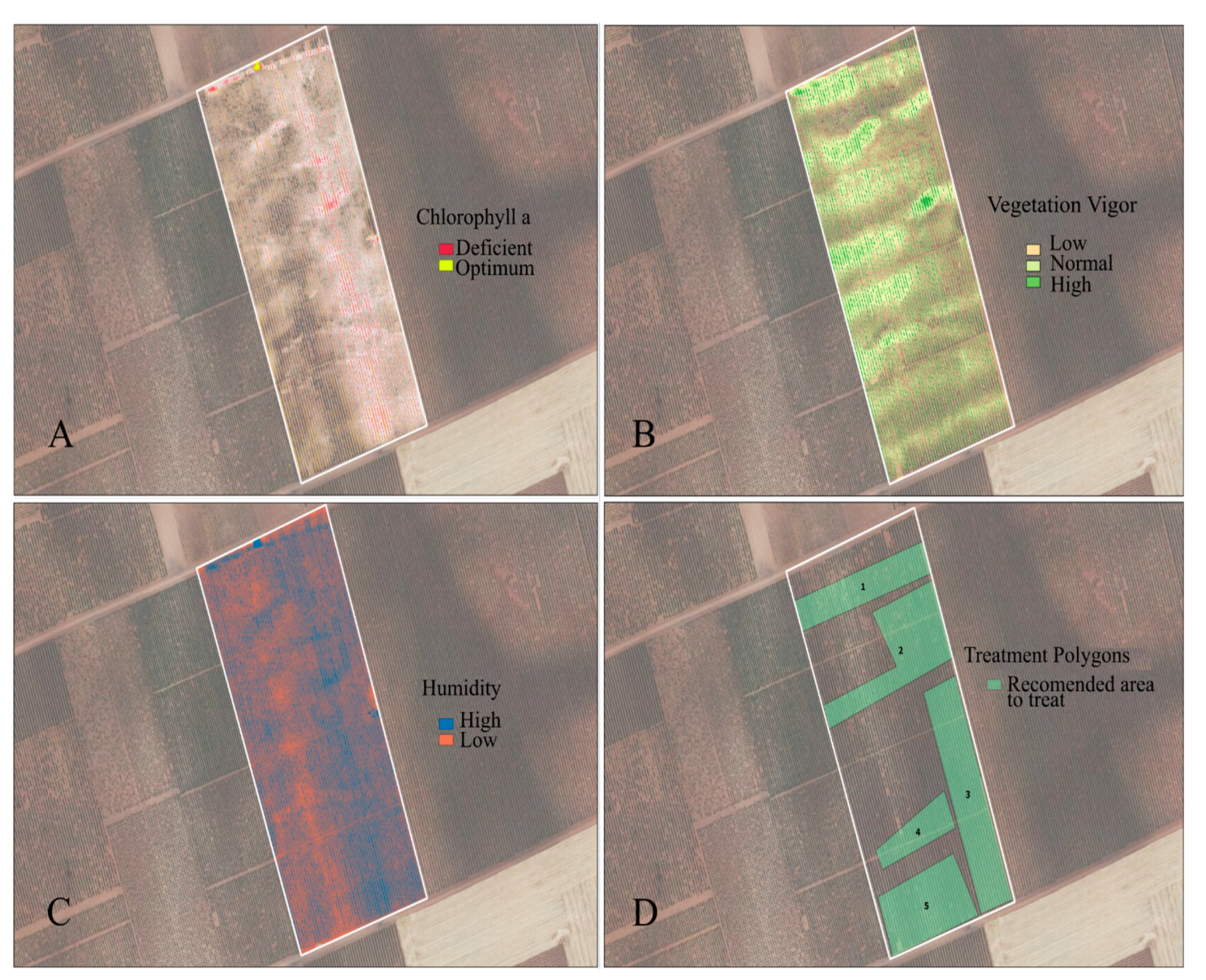
4.1.1. Variable-Rate Fertility
4.1.2. Disease Surveillance
4.1.3. Airborne Pathogens Surveillance
4.1.4. Bird Pest Surveillance
4.2. Irrigation and Fertilization
4.3. Soil and Field Analysis
4.4. Weeds Management
4.5. Crop Harvest
4.6. Crop Insurance
4.7. Mechanical Pollination
4.8. Crops and Trees Plantation
4.9. Applications in Forestry
4.10. Applications in Livestock
5. Economical Aspects
Integrated RPA Technology
6. Conclusions and Future Prospects
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Avşar, D.; Avşar, G. Yeni Tarım Düzeninin Tarımsal Üretim Üzerindeki Etkileri ve Türkiye’deki Uygulamalar. Akad. Platf. 2014, 379–385. [Google Scholar]
- Ozdogan, B.; Gacar, A.; Aktas, H. Digital agriculture practices in the context of agriculture 4.0. J. Econ. Financ. Account. 2017, 4, 186–193. [Google Scholar] [CrossRef]
- Unal, I.; Topakci, M. A review on using drones for precision farming applications. In Proceedings of the 12th International Congress on Agricultural Mechanization and Energy, Nevsehir, Turkey, 3–6 September 2014; pp. 276–283. [Google Scholar]
- Urbahs, A.; Jonaite, I. Features of the use of unmanned aerial vehicles for agriculture applications. Aviation 2013, 17, 170–175. [Google Scholar] [CrossRef]
- Avery, T.E.; Berlin, G.L. Fundamentals of Remote Sensing and Airphoto Interpretation; Macmillan: Stuttgart, Germany, 1992. [Google Scholar]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef] [Green Version]
- Toth, C.; Jóźków, G. Remote sensing platforms and sensors: A survey. ISPRS J. Photogramm. Remote Sens. 2016, 115, 22–36. [Google Scholar] [CrossRef]
- Aerocamaras Company. Available online: https://aerocamaras.es/ (accessed on 29 October 2020).
- Hunt, E.R., Jr.; Daughtry, C.S. What good are unmanned aircraft systems for agricultural remote sensing and precision agriculture? Int. J. Remote Sens. 2018, 39, 5345–5376. [Google Scholar] [CrossRef] [Green Version]
- Oliver, M.; Bishop, T.; Marchant, B. An Overview of Precision Agriculture; Routledge: London, UK, 2013. [Google Scholar]
- Banger, K.; Yuan, M.; Wang, J.; Nafziger, E.D.; Pittelkow, C.M. A vision for incorporating environmental effects into nitrogen management decision support tools for US maize production. Front. Plant Sci. 2017, 8, 1270. [Google Scholar] [CrossRef] [Green Version]
- Rigby, H.; Clarke, B.O.; Pritchard, D.L.; Meehan, B.; Beshah, F.; Smith, S.R.; Porter, N.A. A critical review of nitrogen mineralization in biosolids-amended soil, the associated fertilizer value for crop production and potential for emissions to the environment. Sci. Total Environ. 2016, 541, 1310–1338. [Google Scholar] [CrossRef]
- Wang, J.; Shi, T.; Yu, D.; Teng, D.; Ge, X.; Zhang, Z.; Yang, X.; Wang, H.; Wu, G. Ensemble machine-learning-based framework for estimating total nitrogen concentration in water using drone-borne hyperspectral imagery of emergent plants: A case study in an arid oasis, NW China. Environ. Pollut. 2020, 266, 115412. [Google Scholar] [CrossRef]
- Moazeni, M.; Heidari, Z.; Golipour, S.; Ghaisari, L.; Sillanpää, M.; Ebrahimi, A. Dietary intake and health risk assessment of nitrate, nitrite, and nitrosamines: A Bayesian analysis and Monte Carlo simulation. Environ. Sci. Pollut. Res. 2020, 1–13. [Google Scholar]
- Daponte, P.; De Vito, L.; Glielmo, L.; Iannelli, L.; Liuzza, D.; Picariello, F.; Silano, G. A review on the use of drones for precision agriculture. In Proceedings of the IOP Conference Series: Earth and Environmental Science, Graz, Austria, 11–14 September 2019; p. 012022. [Google Scholar]
- Schimmelpfennig, D. Farm Profits and Adoption of Precision Agriculture; United States Department of Agriculture (USDA): Washington, DC, USA, 2016.
- Santos, L.M.D.; Barbosa, B.D.S.; Andrade, A.D. Use of remotely piloted aircraft in precision agriculture: A review. DYNA 2019, 86, 284–291. [Google Scholar]
- Gallardo-Saavedra, S.; Hernández-Callejo, L.; Duque-Perez, O. Technological review of the instrumentation used in aerial thermographic inspection of photovoltaic plants. Renew. Sustain. Energy Rev. 2018, 93, 566–579. [Google Scholar] [CrossRef]
- Vroegindeweij, B.A.; van Wijk, S.W.; van Henten, E. Autonomous unmanned aerial vehicles for agricultural applications. In Proceedings of the AgEng 2014, Zurich, Switzerland, 6 July 2014. [Google Scholar]
- Muchiri, N.; Kimathi, S. A review of applications and potential applications of UAV. In Proceedings of the Sustainable Research and Innovation Conference, London, UK, 24–26 April 2013; pp. 280–283. [Google Scholar]
- Pino, E. Los drones una herramienta para una agricultura eficiente: Un futuro de alta tecnología. Idesia (Arica) 2019, 37, 75–84. [Google Scholar] [CrossRef] [Green Version]
- Mogili, U.R.; Deepak, B. Review on application of drone systems in precision agriculture. Procedia Comput. Sci. 2018, 133, 502–509. [Google Scholar] [CrossRef]
- Puri, V.; Nayyar, A.; Raja, L. Agriculture drones: A modern breakthrough in precision agriculture. J. Stat. Manag. Syst. 2017, 20, 507–518. [Google Scholar] [CrossRef]
- Rani, A.; Chaudhary, A.; Sinha, N.; Mohanty, M.; Chaudhary, R. Drone: The green technology for future agriculture. Har. Dhara 2019, 2, 3–6. [Google Scholar]
- Negash, L.; Kim, H.-Y.; Choi, H.-L. Emerging UAV Applications in Agriculture. In Proceedings of the 2019 7th International Conference on Robot Intelligence Technology and Applications (RiTA), Daejeon, Korea, 1–3 November 2019; pp. 254–257. [Google Scholar]
- Zhang, W.; Wu, J.; Chen, S. Based on the UAV of land and resources of low level remote sensing applications research. In Proceedings of the 2014 International Conference on Artificial Intelligence and Software Engineering (AISE 2014), Phuket, Thailand, 11–12 January 2014; pp. 27–30. [Google Scholar]
- Stehr, N.J. Drones: The newest technology for precision agriculture. Nat. Sci. Educ. 2015, 44, 89–91. [Google Scholar] [CrossRef]
- Saha, A.K.; Saha, J.; Ray, R.; Sircar, S.; Dutta, S.; Chattopadhyay, S.P.; Saha, H.N. IOT-based drone for improvement of crop quality in agricultural field. In Proceedings of the 2018 IEEE 8th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 8–10 January 2018; pp. 612–615. [Google Scholar]
- Reinecke, M.; Prinsloo, T. The influence of drone monitoring on crop health and harvest size. In Proceedings of the 2017 1st International Conference on Next Generation Computing Applications (NextComp), Mauritius, 19–21 July 2017; pp. 5–10. [Google Scholar]
- De Rango, F.; Palmieri, N.; Santamaria, A.F.; Potrino, G. A simulator for UAVs management in agriculture domain. In Proceedings of the 2017 International Symposium on Performance Evaluation of Computer and Telecommunication Systems (SPECTS), Seattle, WA, USA, 9–12 July 2017; pp. 1–8. [Google Scholar]
- Yallappa, D.; Veerangouda, M.; Maski, D.; Palled, V.; Bheemanna, M. Development and evaluation of drone mounted sprayer for pesticide applications to crops. In Proceedings of the 2017 IEEE Global Humanitarian Technology Conference (GHTC), San Jose, CA, USA, 19–22 October 2017; pp. 1–7. [Google Scholar]
- Kulbacki, M.; Segen, J.; Knieć, W.; Klempous, R.; Kluwak, K.; Nikodem, J.; Kulbacka, J.; Serester, A. Survey of drones for agriculture automation from planting to harvest. In Proceedings of the 2018 IEEE 22nd International Conference on Intelligent Engineering Systems (INES), Canaria, Spain, 21–23 June 2018; pp. 000353–000358. [Google Scholar]
- Siebert, S.; Teizer, J. Mobile 3D mapping for surveying earthwork projects using an Unmanned Aerial Vehicle (UAV) system. Autom. Constr. 2014, 41, 1–14. [Google Scholar] [CrossRef]
- WebODM. Available online: https://www.opendronemap.org/webodm/ (accessed on 30 September 2020).
- Rango, A.; Laliberte, A.; Steele, C.; Herrick, J.E.; Bestelmeyer, B.; Schmugge, T.; Roanhorse, A.; Jenkins, V. Using unmanned aerial vehicles for rangelands: Current applications and future potentials. Environ. Pract. 2006, 8, 159–168. [Google Scholar] [CrossRef] [Green Version]
- Laliberte, A.S.; Herrick, J.E.; Rango, A.; Winters, C. Acquisition, orthorectification, and object-based classification of unmanned aerial vehicle (UAV) imagery for rangeland monitoring. Photogramm. Eng. Remote Sens. 2010, 76, 661–672. [Google Scholar] [CrossRef]
- Torres-Sánchez, J.; Pena, J.M.; de Castro, A.I.; López-Granados, F. Multi-temporal mapping of the vegetation fraction in early-season wheat fields using images from UAV. Comput. Electron. Agric. 2014, 103, 104–113. [Google Scholar] [CrossRef]
- Primicerio, J.; Di Gennaro, S.F.; Fiorillo, E.; Genesio, L.; Lugato, E.; Matese, A.; Vaccari, F.P. A flexible unmanned aerial vehicle for precision agriculture. Precis. Agric. 2012, 13, 517–523. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Malenovský, Z.; Turner, D.; Vopěnka, P. Assessment of forest structure using two UAV techniques: A comparison of airborne laser scanning and structure from motion (SfM) point clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef] [Green Version]
- Turner, D.; Lucieer, A.; De Jong, S.M. Time series analysis of landslide dynamics using an unmanned aerial vehicle (UAV). Remote Sens. 2015, 7, 1736–1757. [Google Scholar] [CrossRef] [Green Version]
- Zhu, H.; Lan, Y.; Wu, W.; Hoffmann, W.C.; Huang, Y.; Xue, X.; Liang, J.; Fritz, B. Development of a PWM precision spraying controller for unmanned aerial vehicles. J. Bionic Eng. 2010, 7, 276–283. [Google Scholar] [CrossRef]
- Swain, K.C.; Thomson, S.J.; Jayasuriya, H.P. Adoption of an unmanned helicopter for low-altitude remote sensing to estimate yield and total biomass of a rice crop. Trans. ASABE 2010, 53, 21–27. [Google Scholar] [CrossRef] [Green Version]
- Turner, D.; Lucieer, A.; Watson, C. Development of an Unmanned Aerial Vehicle (UAV) for hyper resolution vineyard mapping based on visible, multispectral, and thermal imagery. In Proceedings of the 34th International Symposium on Remote Sensing of Environment, Sydney, Australia, 10–15 April 2011; p. 4. [Google Scholar]
- Pudelko, R.; Stuczynski, T.; Borzecka-Walker, M. The suitability of an unmanned aerial vehicle (UAV) for the evaluation of experimental fields and crops. Agriculture 2012, 99, 431–436. [Google Scholar]
- Stefanakis, D.; Hatzopoulos, J.N.; Margaris, N.; Danalatos, N. Creation of a remote sensing unmanned aerial system (UAS) for precision agriculture and related mapping applications. In Proceedings of the 2013 ASPRS Annual Conference, Baltimore, MD, USA, 24–28 March 2013; pp. 13–59. [Google Scholar]
- Honkavaara, E.; Saari, H.; Kaivosoja, J.; Pölönen, I.; Hakala, T.; Litkey, P.; Mäkynen, J.; Pesonen, L. Processing and assessment of spectrometric, stereoscopic imagery collected using a lightweight UAV spectral camera for precision agriculture. Remote Sens. 2013, 5, 5006–5039. [Google Scholar] [CrossRef] [Green Version]
- Von Bueren, S.; Yule, I. Multispectral aerial imaging of pasture quality and biomass using unmanned aerial vehicles (UAV). Accurate Effic. Use Nutr. FarmsOccas. Rep. 2013, 26, 1–5. [Google Scholar]
- Torres-Sánchez, J.; López-Granados, F.; De Castro, A.I.; Peña-Barragán, J.M. Configuration and specifications of an unmanned aerial vehicle (UAV) for early site specific weed management. PLoS ONE 2013, 8, e58210. [Google Scholar] [CrossRef] [Green Version]
- Natu, A.S.; Kulkarni, S. Adoption and utilization of drones for advanced precision farming: A review. Int. J. Recent Innov. Trends Comput. Commun. 2016, 4, 563–565. [Google Scholar]
- Mulla, D.J. Twenty five years of remote sensing in precision agriculture: Key advances and remaining knowledge gaps. Biosyst. Eng. 2013, 114, 358–371. [Google Scholar] [CrossRef]
- Zhang, B.; Wu, D.; Zhang, L.; Jiao, Q.; Li, Q. Application of hyperspectral remote sensing for environment monitoring in mining areas. Environ. Earth Sci. 2012, 65, 649–658. [Google Scholar] [CrossRef]
- Rousel, J.; Haas, R.; Schell, J.; Deering, D. Monitoring vegetation systems in the great plains with ERTS. In Proceedings of the Third Earth Resources Technology Satellite—1 Symposium, NASA SP-351. Washington, DC, USA, 10–14 December 1973; pp. 309–317. [Google Scholar]
- Huete, A.; Huete, A.R. A soil-adjusted vegetation index (SAVI). Remote Sensing of Environment. Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Qi, J.; Chehbouni, A.; Huete, A.R.; Kerr, Y.H.; Sorooshian, S. A modified soil adjusted vegetation index. Remote Sens. Environ. 1994, 48, 119–126. [Google Scholar] [CrossRef]
- Rahim, H.R.B.A.; Lokman, M.Q.B.; Harun, S.W.; Hornyak, G.L.; Sterckx, K.; Mohammed, W.S.; Dutta, J. Applied light-side coupling with optimized spiral-patterned zinc oxide nanorod coatings for multiple optical channel alcohol vapor sensing. J. Nanophotonics 2016, 10, 036009. [Google Scholar] [CrossRef]
- Huete, A.; Didan, K.; Miura, T.; Rodriguez, E.P.; Gao, X.; Ferreira, L.G. Overview of the radiometric and biophysical performance of the MODIS vegetation indices. Remote Sens. Environ. 2002, 83, 195–213. [Google Scholar] [CrossRef]
- Broge, N.H.; Leblanc, E. Comparing prediction power and stability of broadband and hyperspectral vegetation indices for estimation of green leaf area index and canopy chlorophyll density. Remote Sens. Environ. 2001, 76, 156–172. [Google Scholar] [CrossRef]
- Haboudane, D.; Miller, J.R.; Pattey, E.; Zarco-Tejada, P.J.; Strachan, I.B. Hyperspectral vegetation indices and novel algorithms for predicting green LAI of crop canopies: Modeling and validation in the context of precision agriculture. Remote Sens. Environ. 2004, 90, 337–352. [Google Scholar] [CrossRef]
- Vincini, M.; Frazzi, E.; D’Alessio, P. A broad-band leaf chlorophyll vegetation index at the canopy scale. Precis. Agric. 2008, 9, 303–319. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Kaufman, Y.J.; Merzlyak, M.N. Use of a green channel in remote sensing of global vegetation from EOS-MODIS. Remote Sens. Environ. 1996, 58, 289–298. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Gritz, Y.; Merzlyak, M.N. Relationships between leaf chlorophyll content and spectral reflectance and algorithms for non-destructive chlorophyll assessment in higher plant leaves. J. Plant Physiol. 2003, 160, 271–282. [Google Scholar] [CrossRef] [PubMed]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef] [Green Version]
- Louhaichi, M.; Borman, M.M.; Johnson, D.E. Spatially located platform and aerial photography for documentation of grazing impacts on wheat. Geocarto Int. 2001, 16, 65–70. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Kaufman, Y.J.; Stark, R.; Rundquist, D. Novel algorithms for remote estimation of vegetation fraction. Remote Sens. Environ. 2002, 80, 76–87. [Google Scholar] [CrossRef] [Green Version]
- Gitelson, A.; Merzlyak, M.N. Quantitative estimation of chlorophyll-ausing reflectance spectra: Experiments with autumn chestnut and maple leaves. J. Photochem. Photobiol. B Biol. 1994, 22, 247–252. [Google Scholar] [CrossRef]
- Dash, J.; Curran, P. The MERIS Terrestrial Chlorophyll Index; Taylor & Francis: Abingdon, UK, 2004. [Google Scholar]
- Daughtry, C.; Walthall, C.; Kim, M.; De Colstoun, E.B.; McMurtrey Iii, J. Estimating corn leaf chlorophyll concentration from leaf and canopy reflectance. Remote Sens. Environ. 2000, 74, 229–239. [Google Scholar] [CrossRef]
- Haboudane, D.; Miller, J.R.; Tremblay, N.; Zarco-Tejada, P.J.; Dextraze, L. Integrated narrow-band vegetation indices for prediction of crop chlorophyll content for application to precision agriculture. Remote Sens. Environ. 2002, 81, 416–426. [Google Scholar] [CrossRef]
- Haboudane, D.; Tremblay, N.; Miller, J.R.; Vigneault, P. Remote estimation of crop chlorophyll content using spectral indices derived from hyperspectral data. IEEE Trans. Geosci. Remote Sens. 2008, 46, 423–437. [Google Scholar] [CrossRef]
- Eitel, J.; Long, D.; Gessler, P.; Hunt, E. Combined spectral index to improve ground-based estimates of nitrogen status in dryland wheat. Agron. J. 2008, 100, 1694–1702. [Google Scholar] [CrossRef] [Green Version]
- Hunt Jr, E.R.; Daughtry, C.; Eitel, J.U.; Long, D.S. Remote sensing leaf chlorophyll content using a visible band index. Agron. J. 2011, 103, 1090–1099. [Google Scholar] [CrossRef] [Green Version]
- Hoffmann, H.; Nieto, H.; Jensen, R.; Guzinski, R.; Zarco-Tejada, P.; Friborg, T. Estimating evapotranspiration with thermal UAV data and two source energy balance models. Hydrol. Earth Syst. Sci. Discuss. 2015, 12. [Google Scholar] [CrossRef]
- Gitelson, A.A. Wide dynamic range vegetation index for remote quantification of biophysical characteristics of vegetation. J. Plant Physiol. 2004, 161, 165–173. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Idso, S.; Jackson, R.; Pinter, P., Jr.; Reginato, R.; Hatfield, J. Normalizing the stress-degree-day parameter for environmental variability. Agric. Meteorol. 1981, 24, 45–55. [Google Scholar] [CrossRef]
- Psirofonia, P.; Samaritakis, V.; Eliopoulos, P.; Potamitis, I. Use of unmanned aerial vehicles for agricultural applications with emphasis on crop protection: Three novel case-studies. Int. J. Agric. Sci. Technol. 2017, 5, 30–39. [Google Scholar] [CrossRef]
- Mahajan, G.; Pandey, R.; Sahoo, R.; Gupta, V.; Datta, S.; Kumar, D. Monitoring nitrogen, phosphorus and sulphur in hybrid rice (Oryza sativa L.) using hyperspectral remote sensing. Precis. Agric. 2017, 18, 736–761. [Google Scholar] [CrossRef]
- Ren, Q.; Zhang, R.; Cai, W.; Sun, X.; Cao, L. Application and Development of New Drones in Agriculture. In Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2020; p. 052041. [Google Scholar]
- Wang, W.; Paschalidis, K.; Feng, J.-C.; Song, J.; Liu, J.-H. Polyamine catabolism in plants: A universal process with diverse functions. Front. Plant Sci. 2019, 10, 561. [Google Scholar] [CrossRef] [Green Version]
- Gómez-Candón, D.; Virlet, N.; Labbé, S.; Jolivot, A.; Regnard, J.-L. Field phenotyping of water stress at tree scale by UAV-sensed imagery: New insights for thermal acquisition and calibration. Precis. Agric. 2016, 17, 786–800. [Google Scholar] [CrossRef]
- Knipper, K.R.; Kustas, W.P.; Anderson, M.C.; Alfieri, J.G.; Prueger, J.H.; Hain, C.R.; Gao, F.; Yang, Y.; McKee, L.G.; Nieto, H. Evapotranspiration estimates derived using thermal-based satellite remote sensing and data fusion for irrigation management in California vineyards. Irrig. Sci. 2019, 37, 431–449. [Google Scholar] [CrossRef]
- Song, X.-P.; Liang, Y.-J.; Zhang, X.-Q.; Qin, Z.-Q.; Wei, J.-J.; Li, Y.-R.; Wu, J.-M. Intrusion of fall armyworm (Spodoptera frugiperda) in sugarcane and its control by drone in China. Sugar Tech 2020, 1–4. [Google Scholar] [CrossRef]
- Tripicchio, P.; Satler, M.; Dabisias, G.; Ruffaldi, E.; Avizzano, C.A. Towards smart farming and sustainable agriculture with drones. In Proceedings of the 2015 International Conference on Intelligent Environments, Prague, Czech Republic, 15–17 July 2015; pp. 140–143. [Google Scholar]
- Herrmann, I.; Bdolach, E.; Montekyo, Y.; Rachmilevitch, S.; Townsend, P.A.; Karnieli, A. Assessment of maize yield and phenology by drone-mounted superspectral camera. Precis. Agric. 2020, 21, 51–76. [Google Scholar] [CrossRef]
- Banu, T.P.; Borlea, G.F.; Banu, C. The use of drones in forestry. J. Environ. Sci. Eng. B 2016, 5, 557–562. [Google Scholar]
- Torresan, C.; Berton, A.; Carotenuto, F.; Di Gennaro, S.F.; Gioli, B.; Matese, A.; Miglietta, F.; Vagnoli, C.; Zaldei, A.; Wallace, L. Forestry applications of UAVs in Europe: A review. Int. J. Remote Sens. 2017, 38, 2427–2447. [Google Scholar] [CrossRef]
- D’Odorico, P.; Besik, A.; Wong, C.Y.; Isabel, N.; Ensminger, I. High-throughput drone-based remote sensing reliably tracks phenology in thousands of conifer seedlings. New Phytol. 2020, 226, 1667–1681. [Google Scholar] [CrossRef] [PubMed]
- Vayssade, J.-A.; Arquet, R.; Bonneau, M. Automatic activity tracking of goats using drone camera. Comput. Electron. Agric. 2019, 162, 767–772. [Google Scholar] [CrossRef]
- Castaldi, F.; Pelosi, F.; Pascucci, S.; Casa, R. Assessing the potential of images from unmanned aerial vehicles (UAV) to support herbicide patch spraying in maize. Precis. Agric. 2017, 18, 76–94. [Google Scholar] [CrossRef]
- Getzin, S.; Wiegand, K.; Schöning, I. Assessing biodiversity in forests using very high-resolution images and unmanned aerial vehicles. Methods Ecol. Evol. 2012, 3, 397–404. [Google Scholar] [CrossRef]
- Hardin, P.J.; Jackson, M.W. An unmanned aerial vehicle for rangeland photography. Rangel. Ecol. Manag. 2005, 58, 439–442. [Google Scholar] [CrossRef]
- Hunt, E.; Hively, W.D.; Daughtry, C.S.; McCarty, G.W.; Fujikawa, S.J.; Ng, T.; Tranchitella, M.; Linden, D.S.; Yoel, D.W. Remote sensing of crop leaf area index using unmanned airborne vehicles. In Proceedings of the 17th William T. Pecora Memorial Remote Sensing Symposium, Denver, CO, USA, 16–20 November 2008; pp. 18–20. [Google Scholar]
- Romero, V.R.; Villareal, A.M.; León, J.L.T.; Hernández, A.H. Perspectivas de la tecnología VANT en el cultivo de palma de aceite: Monitorización del cultivo mediante imágenes aéreas de alta resolución. Rev. Palmas 2015, 36, 25–41. [Google Scholar]
- Laliberte, A.S.; Rango, A. Image processing and classification procedures for analysis of sub-decimeter imagery acquired with an unmanned aircraft over arid rangelands. GISci. Remote Sens. 2011, 48, 4–23. [Google Scholar] [CrossRef] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Drone | Parameter | Value |
|---|---|---|
| Honeycomb AgDrone | ||
| Drone type | Fixed wing | |
| Material | Kevlar Exoskeleton | |
| Wingspan and Battery | 1.2 m; 8 Ah Lipo | |
| Coverage | 34,722,000 m2 | |
| Trigger Method | Automatic Dual Camera Electrical Signal | |
| Flight Specifications | Cruise Speed: 12.7 ms−1 Max Speed: 22.7 ms−1 | |
| DJI Matrice 100 | ||
| Drone Type | Fixed Wing Quadcopter | |
| Battery | 5.7 Ah LiPo 6s | |
| Video Output | USB, HDMI-mini | |
| Flight Specifications | Max Speed: 5 ms−1 (Ascent) Max Speed: 4 ms−1 (Descent) | |
| Operating Temperature | −10 ℃ to 4 ℃ | |
| Others | Intelligent Flight Battery, Advanced Flight Navigation System | |
| DJI T600 Inspire | ||
| Material | Carbon Fiber | |
| Interface Type | Detachable | |
| Battery | 4.5 Ah LiPo 6s | |
| Camera Features | Image: 4000 × 3000 ISO Range” 100-3200 (Video) Photography Modes: Single, Burst, Auto Exposure, Time-Lapse Video Modes: UHD, FHD, HD File Formats: JPEG, DNG, MP4, MOV MEMORY Card: 64 GB (Max) | |
| Flight Operations | Max Speed: 5 ms−1 (Ascent) Max Speed: 4 ms−1 (Descent) | |
| Flight Time | 18 min /40 min with additional battery | |
| Others | Easy Navigation | |
| Agras MG-1- DJI | ||
| Drone Type | Octocopter | |
| Material | High Performance Engineered Plastics | |
| Coverage | 4000–6000 m2 in 10 min | |
| Liquid Tank | 10 Kg (Payload), 10 L (Volume) | |
| Nozzle | 4 | |
| Battery | MG-12000 | |
| Flight Parameters | Max Take Off Weight: 42.5 Kg Max Operating Speed: 8 ms−1 Max Flying Speed: 22 ms−1 Flight Modes: Smart, Manual Plus Mode and Manual | |
| Operating Temperature | 0 to 40 ℃ | |
| Others | Y-type Folding Structure | |
| EBEE SQ- SenseFly | ||
| Drone Type | Detachable Wings with Low-Noise, Brushless and Electric Motor | |
| Flight Operations | Max Flight Time: 55 min Linear Landing with 5 m Flight Planning Software: eMotion Ag | |
| Sensors | 4 Spectral Sensors, GPS, IMU, Magnetometer, SD Card | |
| Camera | 4–1.2 MP Spectral Camera 1 fps 16 MP RGB Camera | |
| Others | Automatic 3D Flight Planning, Problem Identification During Flight | |
| Lancaster 5 Precision Hawk | ||
| CPU | 720 MHz Dual Core Linux | |
| Interface | Analog, Digital, Wi-Fi, Ethernet, USB | |
| Wing | Fixed Wing with Single Electric Motor | |
| Battery | 7 Ah | |
| Sensors | Humidity, Temperature, Pressure, Incident Light Plug and Play sensors | |
| Flight Parameters | Altitude: 2500 m Max Speed: 21.9 ms−1 Survey Span: 50–300 m | |
| Operating Temperature | 40 ℃ | |
| Others | Smart Flight Controls, Open Source Technology | |
| SOLO AGCO Edition | ||
| Flight Controller | PIXHAWK | |
| Material | Self-Tightening Glass-Fortified Nylon Props | |
| CPU | 1 GHz On-board Computer | |
| Video | Full HD Streaming to Mobile Devices | |
| Flight Parameters | Max Speed: 24.5 ms−1 Flight Time: 25 min Auto Take Off and Landing | |
| Camera | 2 Cameras: GoPro 4 Hero4 Silver for RGB NIR GoPro | |
| Others | Field Health Mapping (NDVI) Management Zone Mapping | |
| Visible Band Cameras | ||||||
|---|---|---|---|---|---|---|
| Name | Pixel Size (µm) | Sensor Type and Resolution (MPx) | Size (mm2) | Weight (kg) | Frame Rate (fps) | Speed (s−1) |
| iXA 180 | 5.2 | CCD 80 | 53.7 × 40.4 | 1.70 | 0.7 | 4000 (fp), 1600 (ls) |
| IQ180 | 5.2 | CCD 80 | 53.7 × 40.4 | 1.50 | - | 1000 (ls) |
| H4D-60 | 6.0 | CCD 60 | 53.7 × 40.2 | 1.80 | 0.7 | 800 (ls) |
| NEX-7 | 3.9 | CMOS 24.3 | 23.5 × 15.6 | 0.35 | 2.3 | 4000 (fp) |
| GXR A16 | 4.8 | CMOS 16.2 | 23.6 × 15.7 | 0.35 | 3 | 3200 (fp) |
| Multispectral Cameras | ||||||
| Name | Pixel Size (µm) | Sensor Type and Resolution (MPx) | Size (mm2) | Weight (kg) | Spectral Range (nm) | |
| MiniMCA-6 | 5.2 × 5.2 | CMOS 1.3 | 6.66 × 5.32 | 0.7 | 450–1050 | |
| Condor-5 UAV-285 | 7.5 × 8.1 | CCD 1.4 | 10.2 × 8.3 | 0.8 | 400–1000 | |
| Hyperspectral Cameras | ||||||
| Name | Pixel Size (µm) | Sensor Type and Resolution (MPx) | Size (mm2) | Weight (kg) | Spectral Range | Spectral Bands and Resolution |
| Hyperspectral Camera (Rikola Ltd.) | 5.5 | CMOS | 5.6 × 5.6 | 0.6 | 500–900 | 4010 nm |
| Micro-Hyperspec X-series NIR | 30 | InGaAs | 9.6 × 9.6 | 1.025 | 900–1700 | 6212.9 nm |
| Thermal Cameras | ||||||
| Name | Pixel Size (µm) | Resolution (MPx) | Size (mm2) | Weight (kg) | Spectral Range | Thermal Sensitivity (mK) |
| FLIR TAU 2 640 | 17 | 640 × 512 | 10.8 × 8.7 | 0.07 | 7.5–13.5 | ≤50 |
| Miricle 307K-25 | 25 | 640 × 480 | 16 × 12.8 | 0.105 | 8–12 | ≤50 |
| Laser Scanners | ||||||
| Name | Scanning Pattern | Angular Res. (deg) | FOV (deg) | Weight (kg) | Range (m) | Laser Class and λ (nm) |
| IBEO LUX | 4 Scanning parallel lines | (H) 0.125 (V) 0.8 | (H) 110 (V) 3.2 | 1 | 200 | Class A 905 |
| HDL-32E | 32 Laser/detector Pairs | (H) – (V) 1.33 | (H) 360 (V) 41 | 2 | 100 | Class A 905 |
| VQ-820-GU | 1 Scanning line | (H) 0.01 (V) N/A | (H) 60 (V) N/A | - | ≥1000 | Class 3B 532 |
| Name | Abbrev. | Requires | Function | Equation | Ref. |
|---|---|---|---|---|---|
| Ratio vegetation index | RVI | Red–NIR | Estimation of green biomass and monitoring | [50] | |
| Perpendicular Vegetation Index | PVI | Red–NIR | Simulation of GVI in Red, NIR 2D data | [51] | |
| Normalized difference vegetation index | NDVI | Red–NIR | Crop monitoring and empirical studies | [52] | |
| Soil-Adjusted Vegetation Index | SAVI | Red-NIR | Improving the sensitivity of NDVI to soil backgrounds | [53] | |
| Modified soil adjusted vegetation index | MSAVI | Red–NIR | Reduction of bare soil influence on SAVI | [54] | |
| Optimized Soil-Adjusted Vegetation Index | OSAVI | Red-NIR | Calculation of the aboveground biomass, leaf nitrogen content, and chlorophyll content | [55] | |
| Enhanced vegetation index | EVI | Vis–NIR | Monitoring of vegetation’s ecological environment | [56] | |
| Triangular vegetation index | TVI | Vis–NIR | Prediction of leaf N status | [57] | |
| Second modified triangular vegetation index | MTVI2 | Vis–NIR | Prediction of leaf N status | [58] | |
| Chlorophyll vegetation index | CVI | Vis–NIR | Representation of the relative abundance of vegetation and soil | [59] | |
| Green normalized difference vegetation index | gNDVI | Green–NIR | Estimation of photo synthetic activity | [60] | |
| Chlorophyll index – green | CI-G | Green–NIR | Determination of leaf chlorophyll content | [61] | |
| Normalized green red difference index | NGRDI | Vis | Estimation of nutrient status | [62] | |
| Green leaf index | GLI | Vis | Estimation of chlorophyll content | [63] | |
| Visible atmospherically resistant index | VARI | Vis | Mitigation of illumination differences and atmospheric effects in visible spectrum | [64] | |
| Normalized difference red edge index | NDREI | RE–NIR | Monitoring crop health | [65] | |
| Chlorophyll index – red edge | CI-RE | RE–NIR | Estimation of leaf chlorophyll content | [61] | |
| MERIS total chlorophyll index | MTCI | RE–NIR | Estimation of chlorophyll content | [66] | |
| Modified chlorophyll absorption reflectance index | MCARI | Red–RE | Measurement of chlorophyll activity | [67] | |
| Transformed chlorophyll absorption reflectance index | TCARI | Red–RE | Assessment of chlorophyll content and related studies | [68] | |
| Triangular chlorophyll index | TCI | Red–RE | Quantification of vegetation in an area | [69] | |
| Combined index with TCARI | - | Red–RE–NIR | Assessment of chlorophyll content and related studies | [58] | |
| Combined index with MCARI | - | Vis–RE–NIR | Assessment of chlorophyll content and related studies | [70] | |
| Triangular greenness index | TGI | Vis | Prediction of crop canopy | [71] | |
| Atmospherically Resistant Vegetation Index | ARVI | Red-Blue-NIR | Reduction of atmospheric interference | [72] | |
| Wide Dynamic Range Vegetation Index | WDRVI | Red-NIR | Enhancement of the dynamic range of NDVI | [73] | |
| Crop Water Stress Index | CWSI | NIR | Measurement of canopy temperature changes and dynamics | [74] | |
| Photochemical Reflectance Index | PRI | NIR | Detection of disease symptoms | [51] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmad, A.; Ordoñez, J.; Cartujo, P.; Martos, V. Remotely Piloted Aircraft (RPA) in Agriculture: A Pursuit of Sustainability. Agronomy 2021, 11, 7. https://doi.org/10.3390/agronomy11010007
Ahmad A, Ordoñez J, Cartujo P, Martos V. Remotely Piloted Aircraft (RPA) in Agriculture: A Pursuit of Sustainability. Agronomy. 2021; 11(1):7. https://doi.org/10.3390/agronomy11010007
Chicago/Turabian StyleAhmad, Ali, Javier Ordoñez, Pedro Cartujo, and Vanesa Martos. 2021. "Remotely Piloted Aircraft (RPA) in Agriculture: A Pursuit of Sustainability" Agronomy 11, no. 1: 7. https://doi.org/10.3390/agronomy11010007