
Comparative Investigation on Improved Aerodynamic and Acoustic Performance of Abnormal Rotors by Bionic Edge Design and Rational Material Selection


 , , ,
, , ,
Abstract
:1. Introduction
2. Materials and Methods
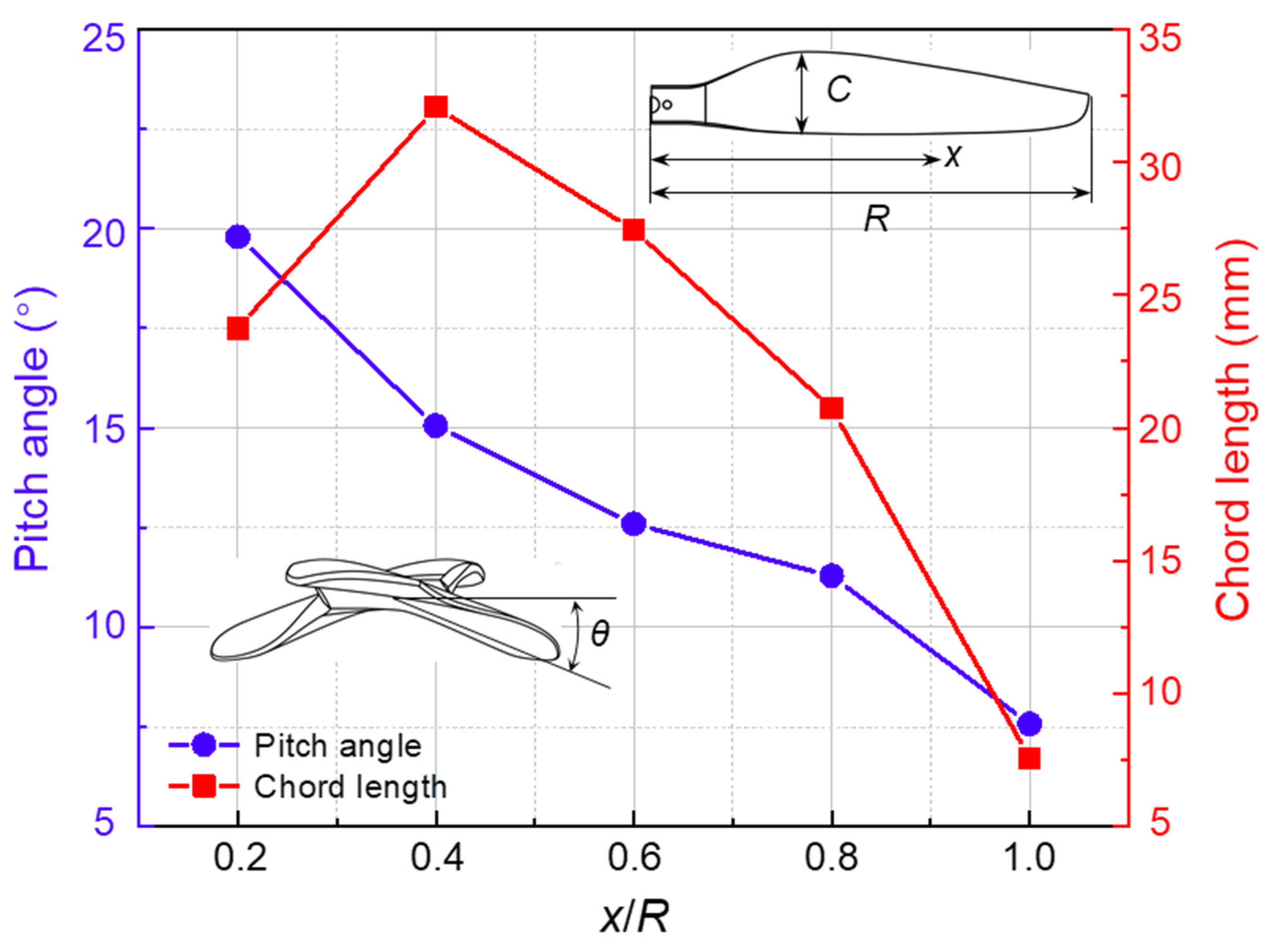
2.1. Vital Structure Parameters of Original Rotor
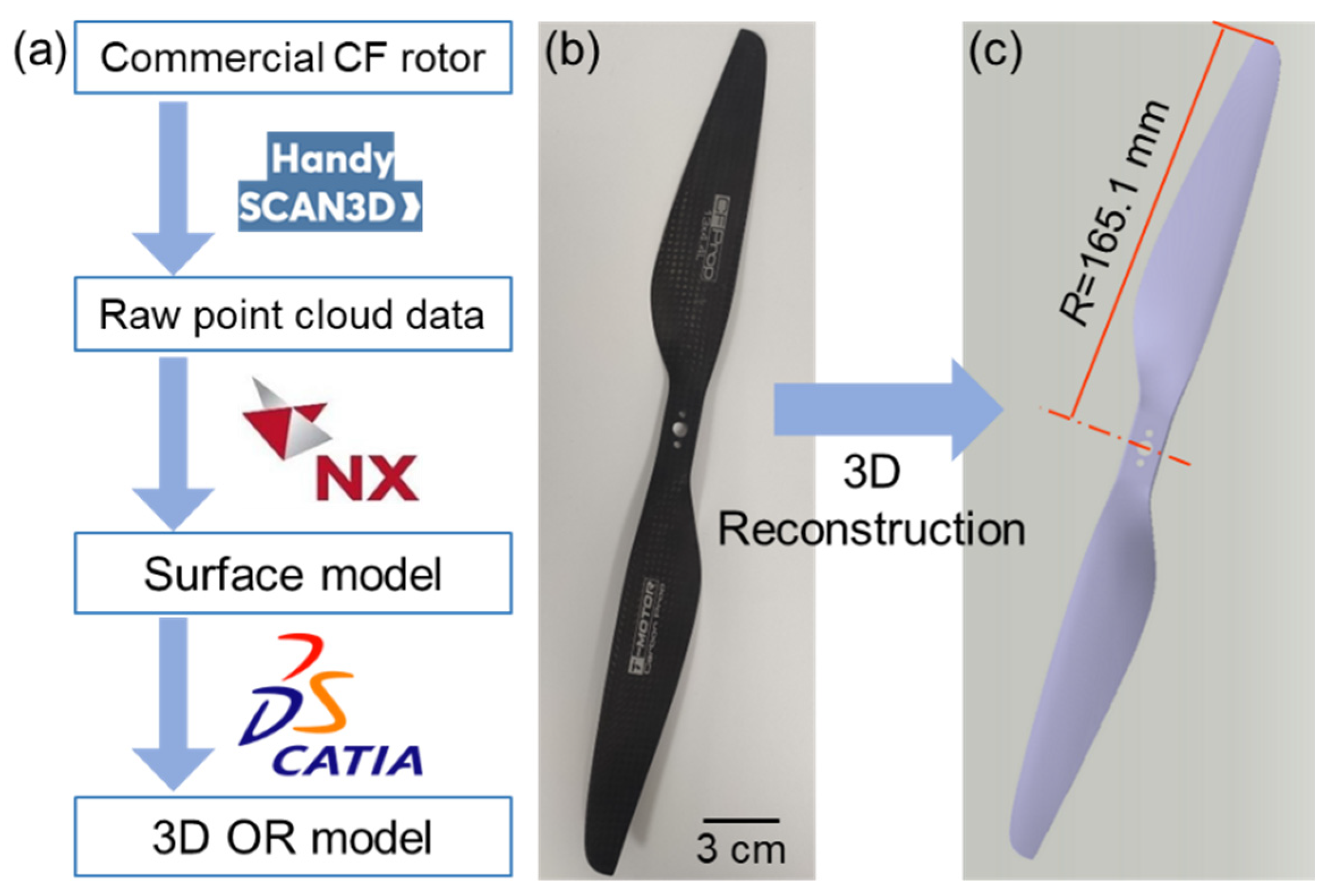
2.2. 3D Reconstruction Model of OR
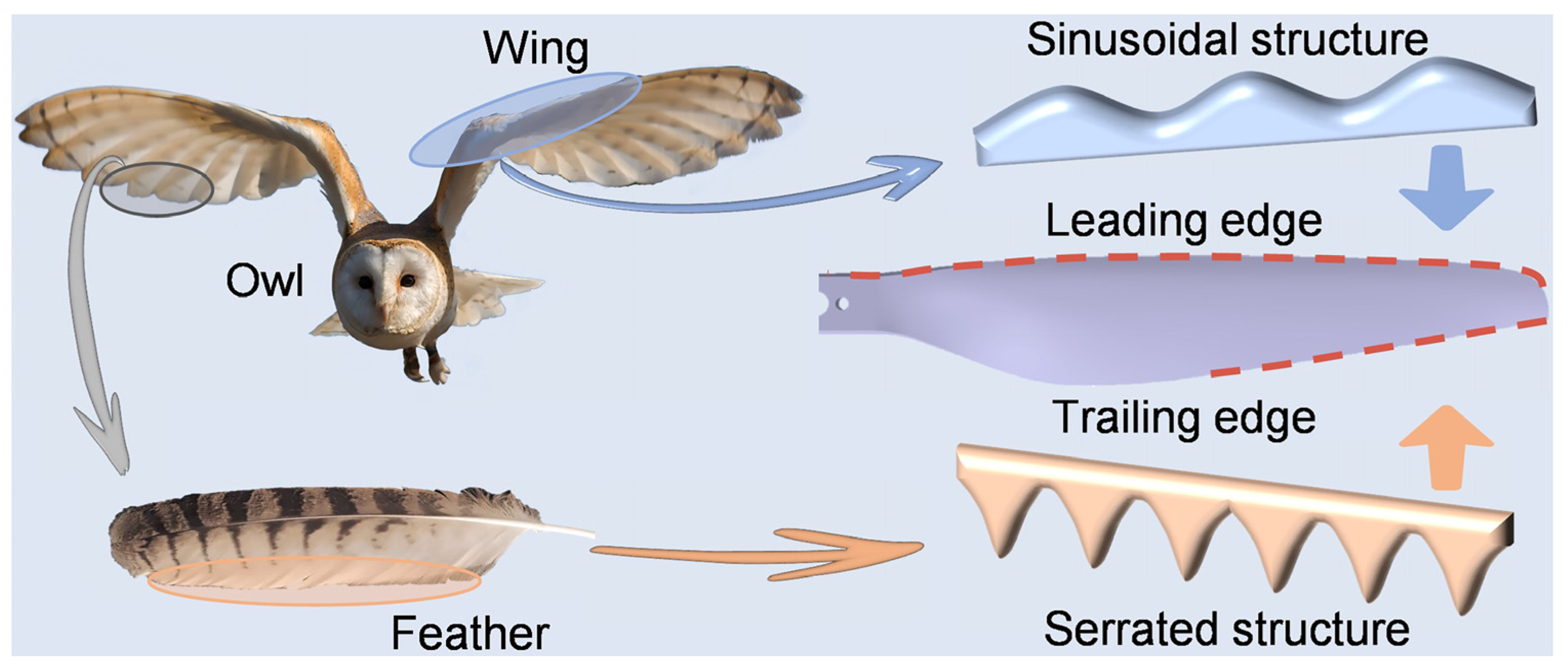
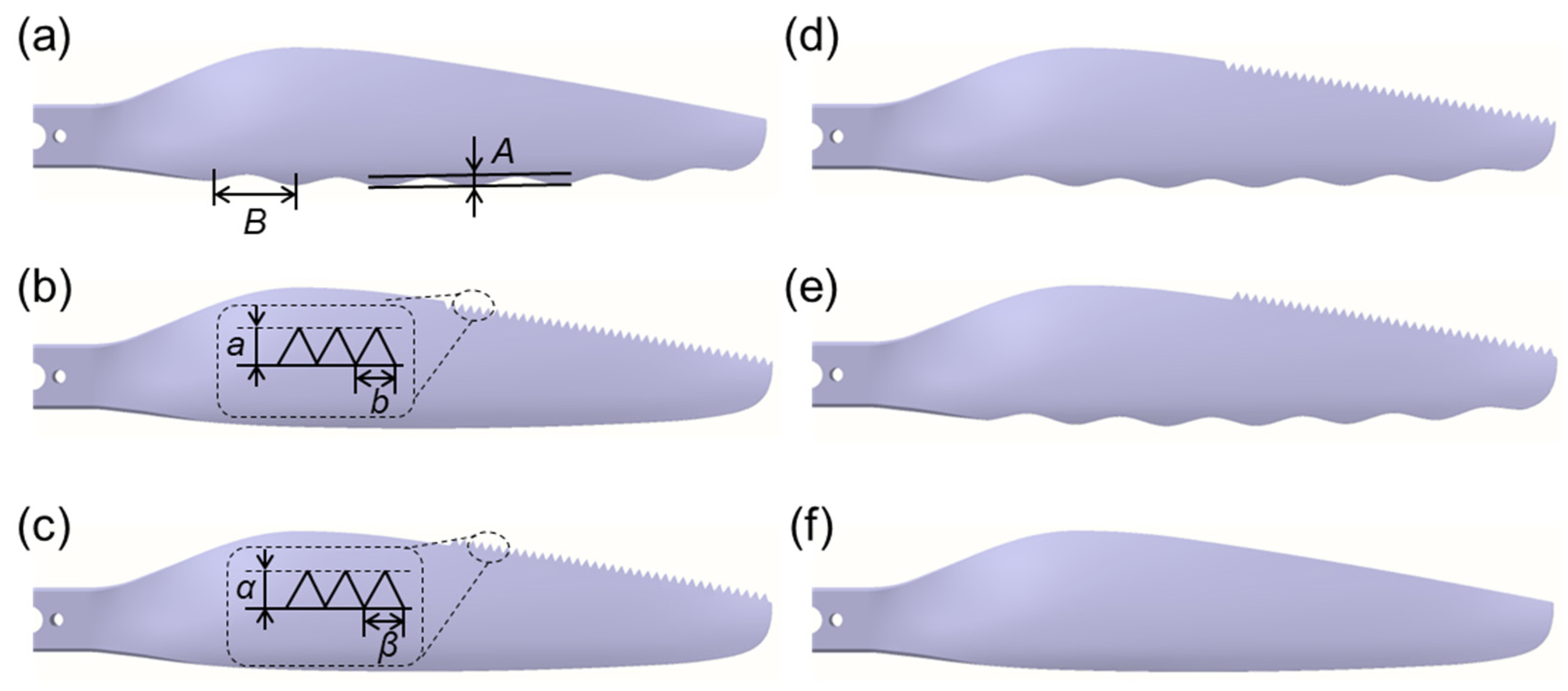
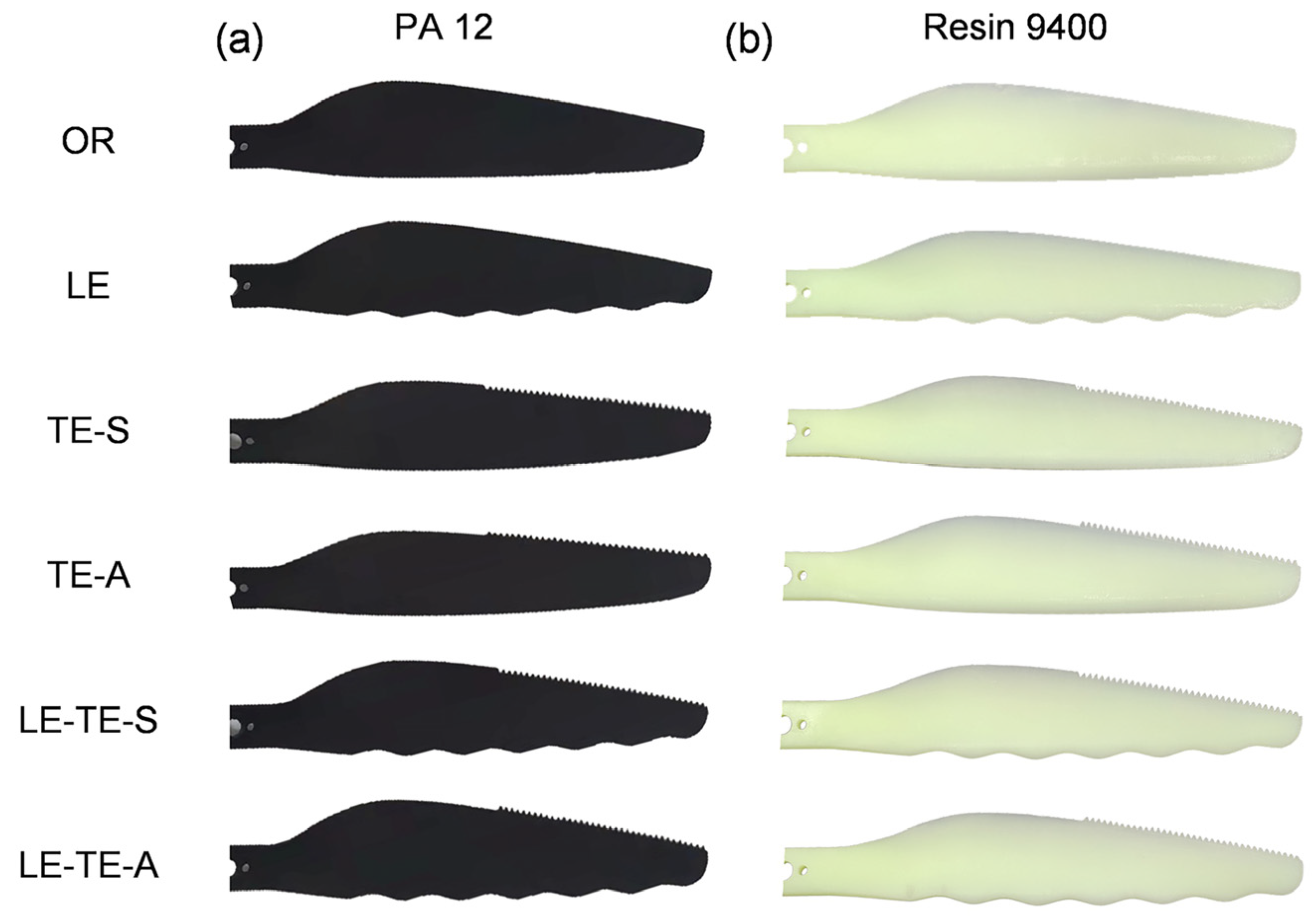
2.3. Structure Acquisition from Owl and Bionic Edge Design
2.4. 3D Printing Rotors with Different Materials
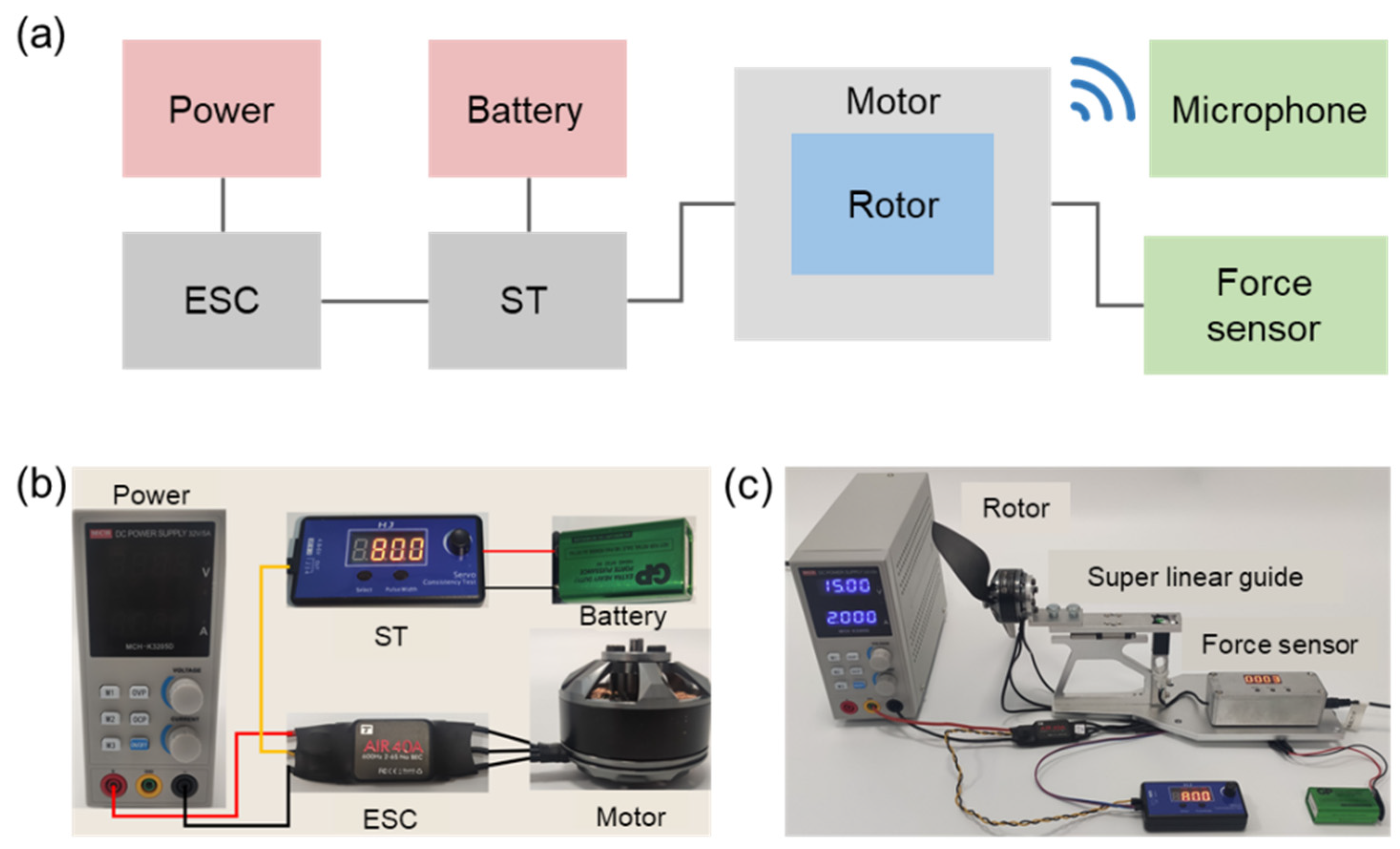
2.5. Experimental Test Setup for Aerodynamic and Acoustic Performance
3. Results and Discussion
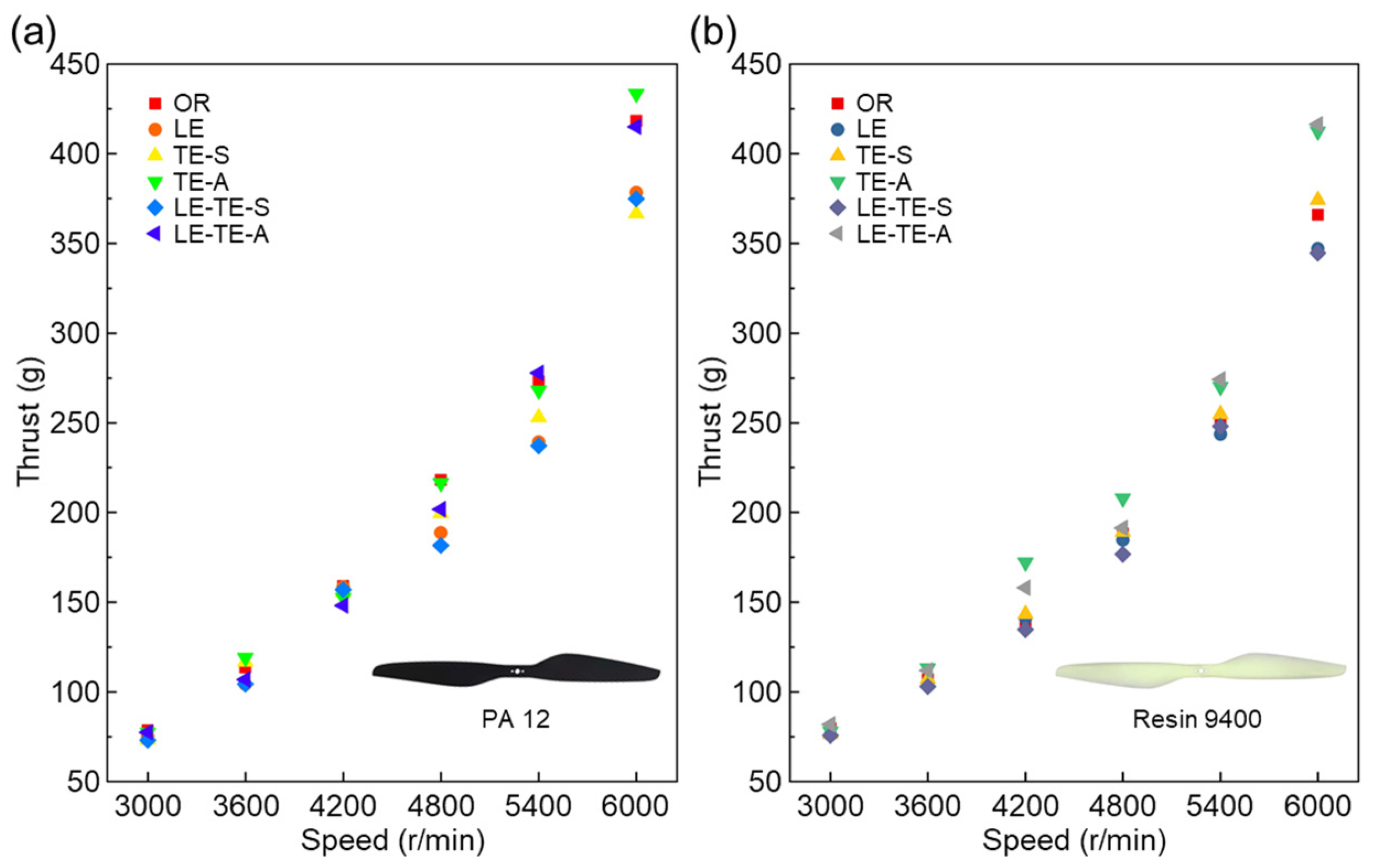
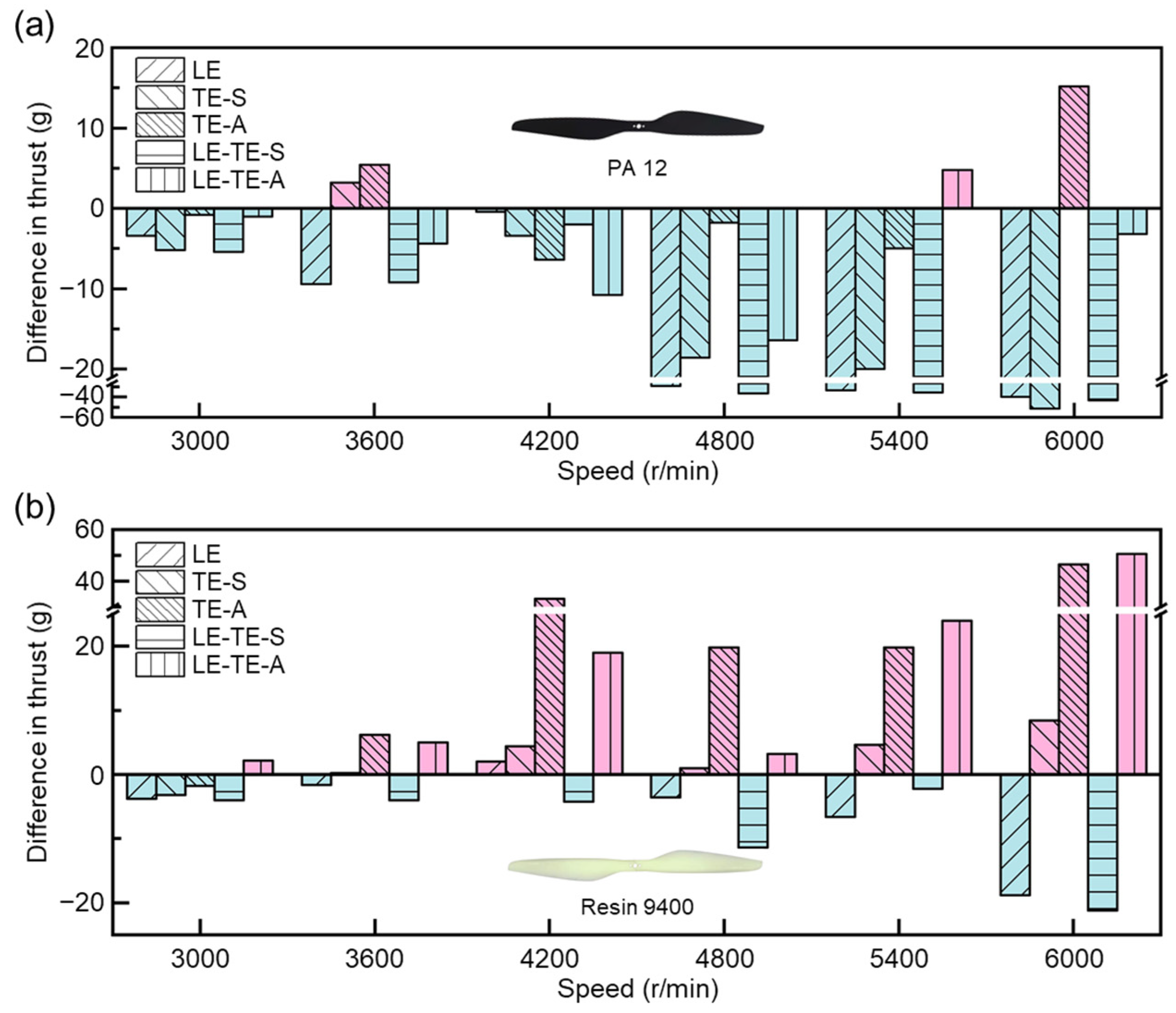
3.1. Thrust Generation
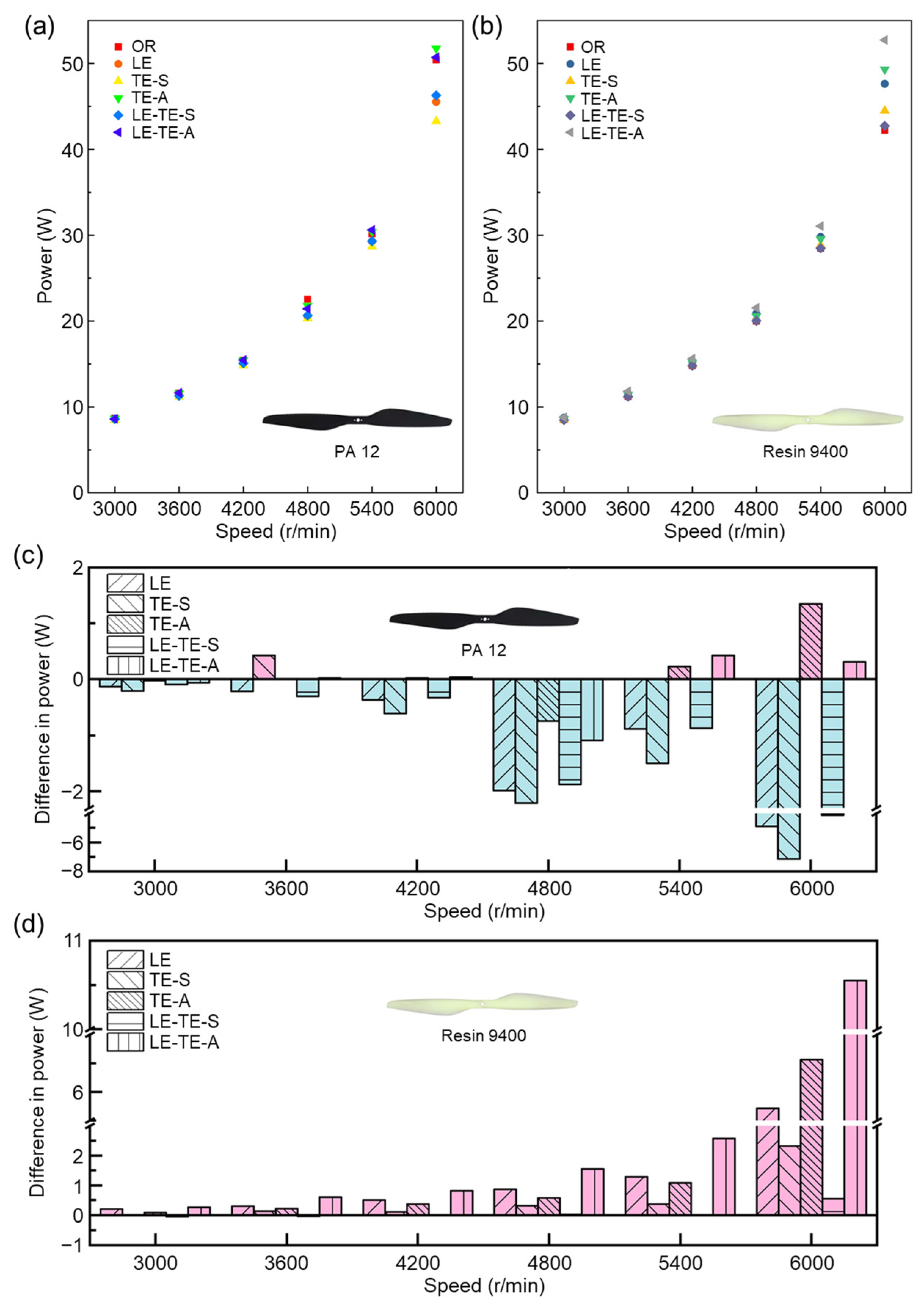
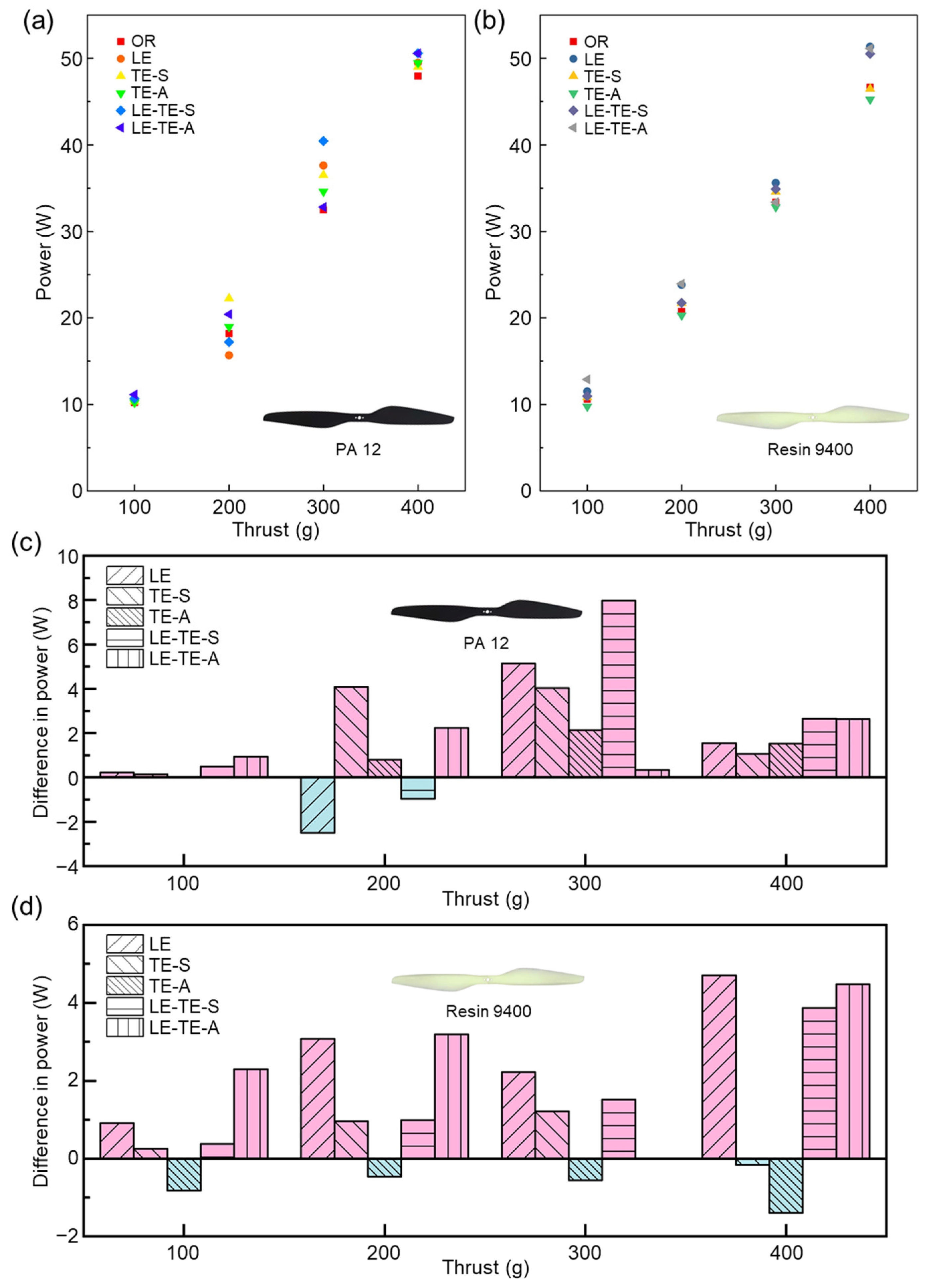
3.2. Power Consumption
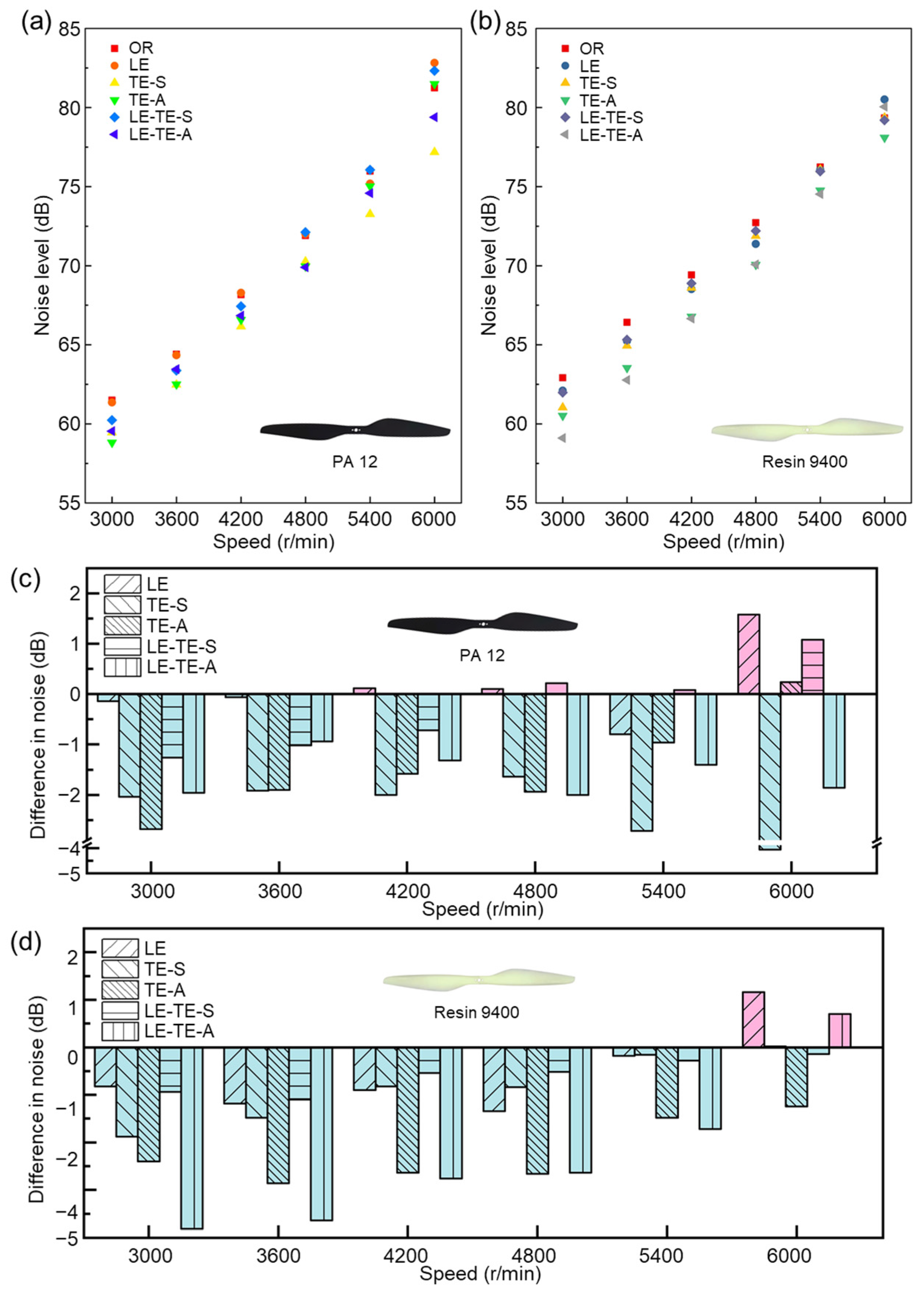
3.3. Noise Reduction
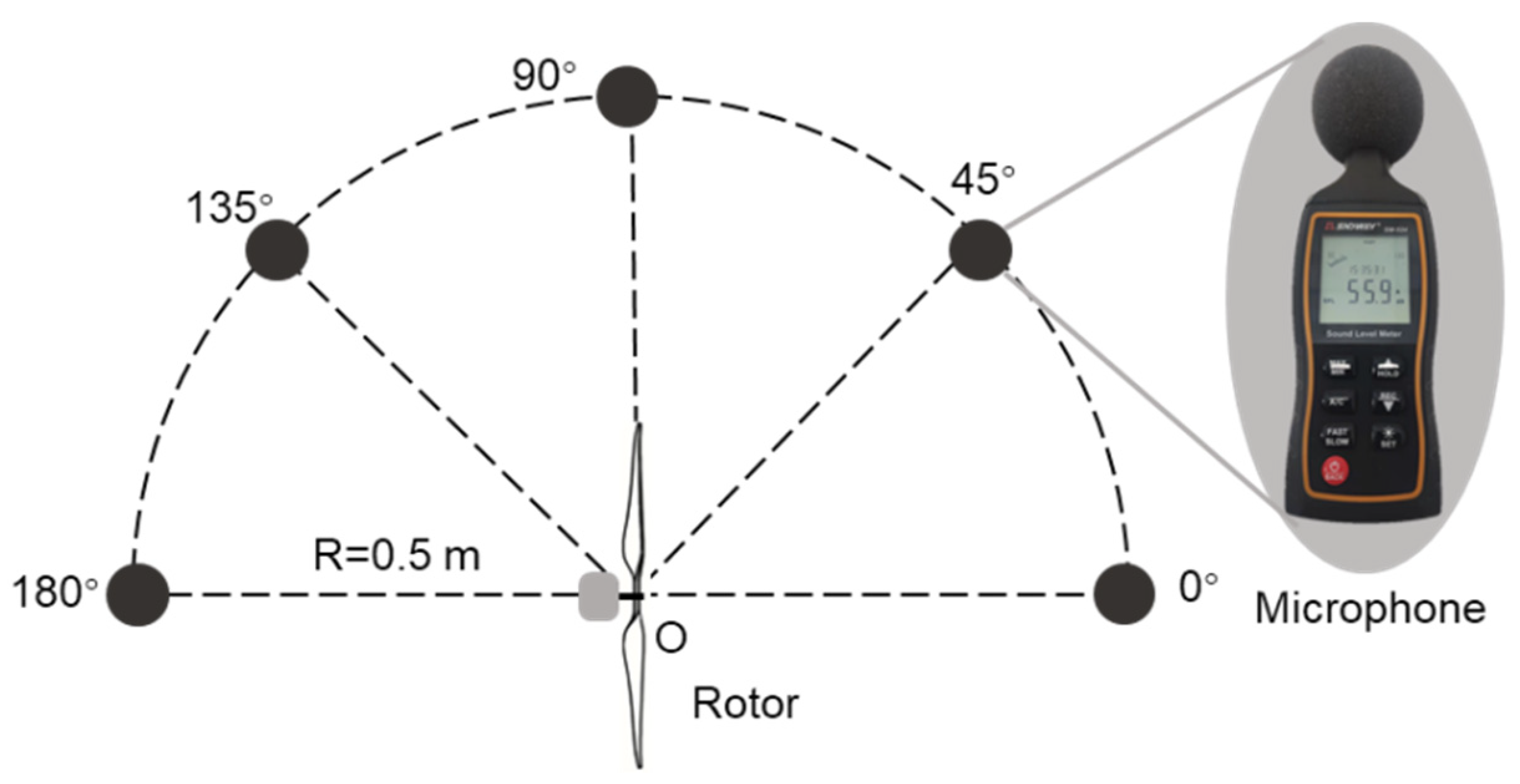
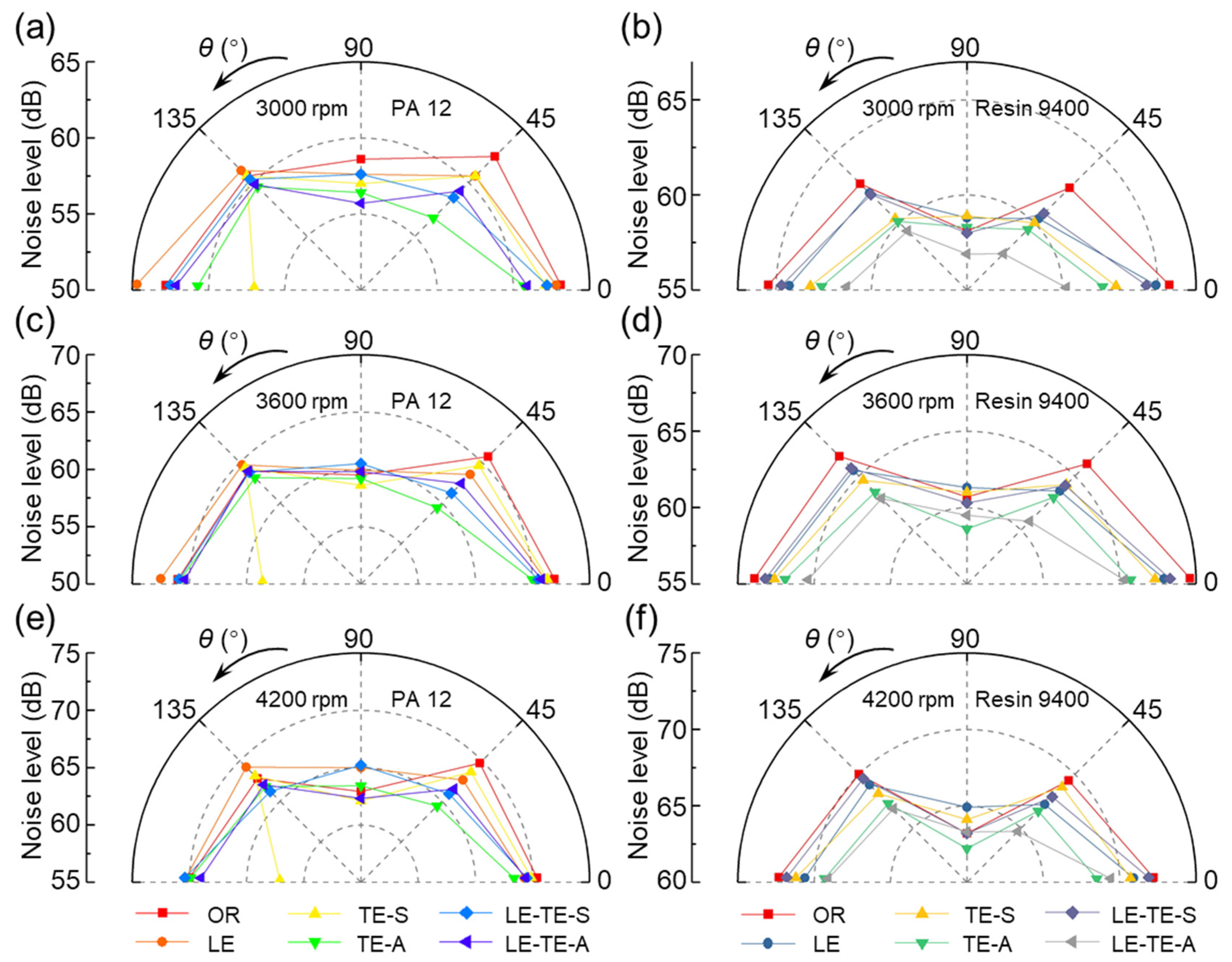
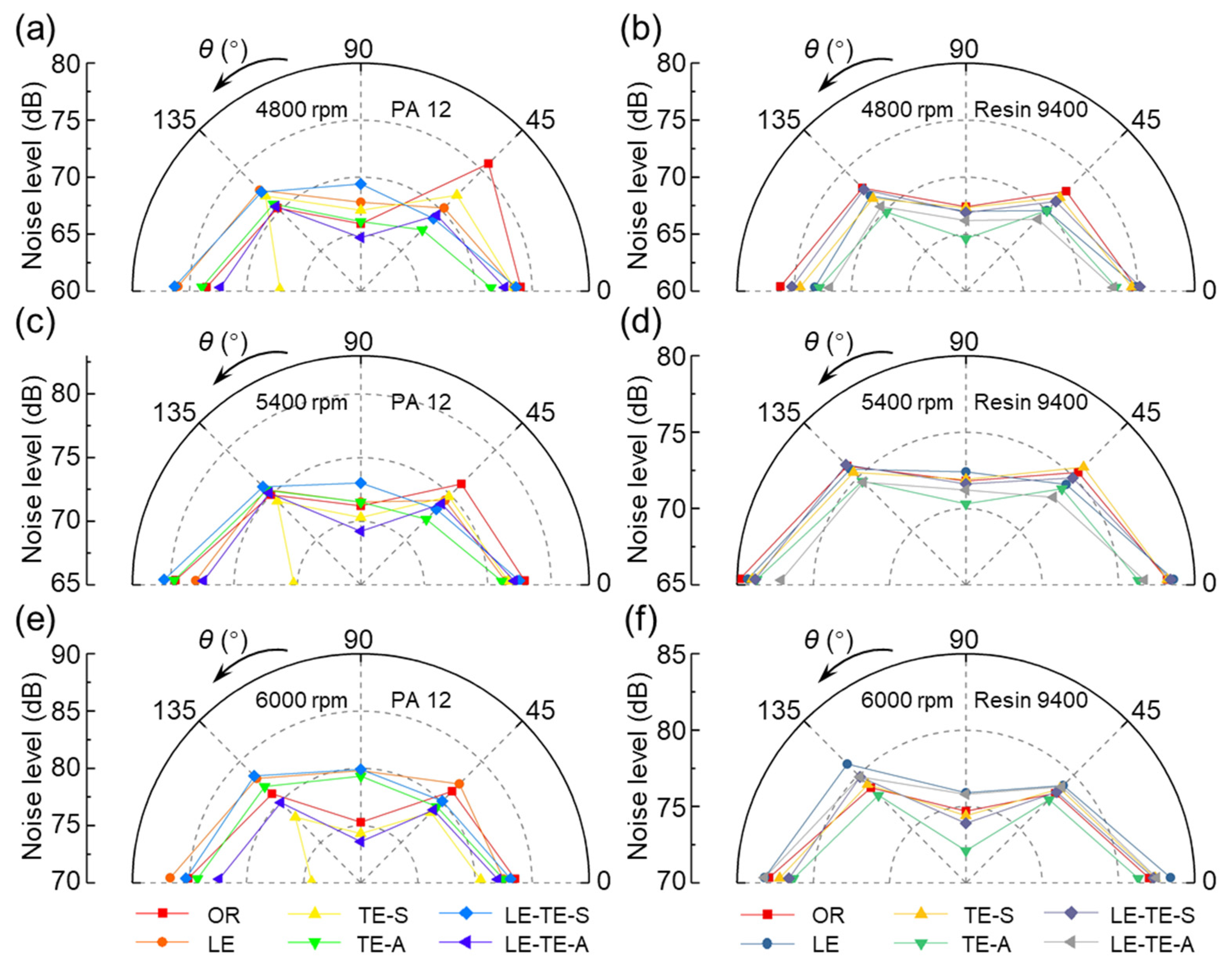
3.4. Noise Directivity
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Throneberry, G.; Hocut, C.; Abdelkefi, A. Multi-rotor wake propagation and flow development modeling: A review. Prog. Aerosp. Sci. 2021, 127, 100762. [Google Scholar] [CrossRef]
- Rao, B.; Gopi, A.G.; Maione, R. The societal impact of commercial drones. Technol. Soc. 2016, 45, 83–90. [Google Scholar] [CrossRef]
- Ollero, A.; de Dios, J.R.M.; Merino, L. Unmanned aerial vehicles as tools for forest-fire fighting. For. Ecol. Manag. 2006, 234, S263. [Google Scholar] [CrossRef]
- Zhu, S.; Wang, D.; Low, C.B. Cooperative control of multiple UAVs for moving source seeking. J. Intell. Robot. Syst. 2014, 74, 333–346. [Google Scholar] [CrossRef]
- Puri, V.; Nayyar, A.; Raja, L. Agriculture drones: A modern breakthrough in precision agriculture. J. Stat. Manag. Syst. 2017, 20, 507–518. [Google Scholar] [CrossRef]
- Galle, B.; Arellano, S.; Bobrowski, N.; Conde, V.; Fischer, T.P.; Gerdes, G.; Gutmann, A.; Hoffmann, T.; Itikarai, I.; Krejci, T.; et al. A multi-purpose, multi-rotor drone system for long-range and high-altitude volcanic gas plume measurements. Atmos. Meas. Tech. 2021, 14, 4255–4277. [Google Scholar] [CrossRef]
- Madruga, S.P.; Tavares, A.H.; Luiz, S.O.; do Nascimento, T.P.; Lima, A.M.N. Aerodynamic Effects Compensa-tion on Multi-Rotor UAVs Based on a Neural Network Control Allocation Approach. IEEE/CAA J. Autom. Sin. 2021, 9, 295–312. [Google Scholar] [CrossRef]
- Noda, R.; Nakata, T.; Senda, K.; Liu, H. Development of Microstructured Low Noise Propeller for Aerial Acoustic Surveillance. In Proceedings of the 2021 IEEE/SICE International Symposium on System Integration (SII), Iwaki, Japan, 11–14 January 2021; pp. 482–486. [Google Scholar]
- Hua, X.; Zhang, C.; Wei, J.; Hu, X.; Wei, H. Wind turbine bionic blade design and performance analysis. J. Vis. Commun. Image Represent. 2019, 60, 258–265. [Google Scholar] [CrossRef]
- Tian, W.; Yang, Z.; Zhang, Q.; Wang, J.; Li, M.; Ma, Y.; Cong, Q. Bionic Design of Wind Turbine Blade Based on Long-Eared Owl’s Airfoil. Appl. Bionics Biomech. 2017, 2017, 8504638. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Cong, Q.; Liang, N.; Mao, S.; Guan, H.; Liu, L.; Chen, C. Bionic design and test of small-sized wind turbine blade based on seagull airfoil. Trans. Chin. Soc. Agric. Eng. 2015, 31, 72–77. [Google Scholar]
- Cen, H.T.; Liu, J.L. Bionic Design Review of Wind Turbine Blades. In Advanced Materials Research; Trans Tech Publications, Ltd.: Freienbach, Switzerland, 2012; pp. 599–603. [Google Scholar]
- Zhang, Y.; Guo, Z.; Zhu, X.; Li, Y.; Song, X.; Cai, C.; Kamada, Y.; Maeda, T.; Li, Q. Investigation of aerodynamic forces and flow field of an H-type vertical axis wind turbine based on bionic airfoil. Energy 2021, 242, 122999. [Google Scholar] [CrossRef]
- Lin, Y.; Li, X.; Zhu, Z.; Wang, X.; Lin, T.; Cao, H. An energy consumption improvement method for centrifugal pump based on bionic optimization of blade trailing edge. Energy 2022, 246, 123323. [Google Scholar] [CrossRef]
- Wu, W.; Dong, W.; Li, S.; Zhang, S. Aero-acoustics Investigation of a Bionic Airfoil Horizontal Axis Wind Turbine Using LES-DCS Approach. J. Phys. Conf. Ser. 2022, 2280, 012001. [Google Scholar] [CrossRef]
- Zhu, X.; Guo, Z.; Zhang, Y.; Song, X.; Cai, C.; Kamada, Y.; Maeda, T.; Li, Q. Numerical study of aerodynamic characteristics on a straight-bladed vertical axis wind turbine with bionic blades. Energy 2021, 239, 122453. [Google Scholar] [CrossRef]
- Wagner, H.; Weger, M.; Klaas, M.; Schröder, W. Features of owl wings that promote silent flight. Interface Focus 2017, 7, 20160078. [Google Scholar] [CrossRef] [Green Version]
- Graham, R.R. The Silent Flight of Owls. J. R. Aeronaut. Soc. 1934, 38, 837–843. [Google Scholar] [CrossRef]
- Wang, B.; Kong, D. CFD simulation of rotor aerodynamic performance when using additional surface structure array. J. Phys. Conf. Ser. 2017, 916, 012010. [Google Scholar] [CrossRef]
- Geyer, T.; Sarradj, E.; Fritzsche, C. Silent owl flight: Experiments in the aeroacoustic wind tunnel. In Proceedings of theNAG/DAGA 2009, Rotterdam, The Netherlands, 23–26 March 2009; pp. 734–736. [Google Scholar]
- Lilley, G. A study of the silent flight of the owl. In Proceedings of the 4th AIAA/CEAS Aeroacoustics Conference, Toulouse, France, 2–4 June 1998; p. 2340. [Google Scholar]
- Ren, L.; Sun, S.; Xu, C. Noise reduction mechanism of non-smooth leading edge of owl wing. J. Jilin Univ. (Eng. Technol. Ed.) 2008, 38, 126–131. [Google Scholar]
- Peacock, T.; Bradley, E. Going with (or Against) the Flow. Science 2008, 320, 1302–1303. [Google Scholar] [CrossRef]
- Clark, I.; Alexander, W.; Devenport, W.; Glegg, S.; Jaworski, J.; Daly, C.; Peake, N. Bio-Inspired Trailing Edge Noise Control, 21st AIAA. In Proceedings of the CEAS Aeroacoustics Conference, AIAA Paper, Dallas, TX, USA, 22–26 June 2015; pp. 1–18. [Google Scholar]
- Rao, C.; Ikeda, T.; Nakata, T.; Liu, H. Owl-inspired leading-edge serrations play a crucial role in aerody-namic force production and sound suppression. Bioinspir. Biomimetics 2017, 12, 046008. [Google Scholar] [CrossRef] [Green Version]
- Hu, H.; Yang, Y.; Liu, Y.; Liu, X.; Wang, Y. Aerodynamic and aeroacoustic investigations of multi-copter rotors with leading edge serrations during forward flight. Aerosp. Sci. Technol. 2021, 112, 106669. [Google Scholar] [CrossRef]
- Wang, L.; Liu, X.; Li, D.J.P.o.F. Noise reduction mechanism of airfoils with leading-edge serrations and surface ridges in-spired by owl wings. Phys. Fluids 2021, 33, 015123. [Google Scholar] [CrossRef]
- Zhao, M.; Cao, H.; Zhang, M.; Liao, C.; Zhou, T. Optimal design of aeroacoustic airfoils with owl-inspired trailing-edge serrations. Bioinspir. Biomimetics 2021, 16, 056004. [Google Scholar] [CrossRef] [PubMed]
- Singh, S.K.; Garg, M.; Narayanan, S.; Ayton, L.; Chaitanya, P. On the Reductions of Airfoil Broadband Noise through Sinusoidal Trailing-Edge Serrations. J. Aerosp. Eng. 2022, 35, 04022003. [Google Scholar] [CrossRef]
- Candeloro, P.; Nargi, R.E.; Grande, E.; Ragni, D.; Pagliaroli, T. Experimental Fluid Dynamic Characterization of Serrated Rotors for Drone Propulsion. J. Phys. Conf. Ser. 2021, 1977, 012007. [Google Scholar] [CrossRef]
- Gao, R.; Chen, K.; Li, Y.; Yao, W. Investigation on aerodynamic performance of wind turbine blades cou-pled with airfoil and herringbone groove structure. J. Renew. Sustain. Energy 2021, 13, 053301. [Google Scholar] [CrossRef]
- Feinerman, J.A.; Koushik, S.; Schmitz, F.H. Effect of leading-edge serrations on helicopter blade–vortex inter-action noise. J. Am. Helicopter Soc. 2017, 62, 1–11. [Google Scholar] [CrossRef]
- Zhou, T.; Cao, H.; Zhang, M.; Liao, C. Performance simulation of wind turbine with optimal designed trailing-edge serrations. Energy 2022, 243, 122998. [Google Scholar] [CrossRef]
- Cao, H.; Zhang, M.; Cai, C.; Zhang, Z. Flow topology and noise modeling of trailing edge serrations. Appl. Acoust. 2020, 168, 107423. [Google Scholar] [CrossRef]
- Hasheminejad, S.M.; Chong, T.P.; Lacagnina, G.; Joseph, P.; Kim, J.-H.; Choi, K.-S.; Omidyeganeh, M.; Pinelli, A.; Stalnov, O. On the manipulation of flow and acoustic fields of a blunt trailing edge aerofoil by serrated leading edges. J. Acoust. Soc. Am. 2020, 147, 3932–3947. [Google Scholar] [CrossRef]
- Biedermann, T.M.; Kameier, F.; Paschereit, C.O. Successive aeroacoustic transfer of leading edge serra-tions from single airfoil to low-pressure fan application. J. Eng. Gas Turbines Power 2019, 141, 101011. [Google Scholar] [CrossRef]
- Chaitanya, P.; Joseph, P.; Narayanan, S.; Vanderwel, C.; Turner, J.; Kim, J.-W.; Ganapathisubramani, B. Perfor-mance and mechanism of sinusoidal leading edge serrations for the reduction of turbulence–aerofoil interaction noise. J. Fluid Mech. 2017, 818, 435–464. [Google Scholar] [CrossRef] [Green Version]
- Post, M.; Sapell, A.R.; Hart, J.S. Bio-inspired sinusoidal leading-edged wings. In Proceedings of the 46th AIAA Fluid Dy-Namics Conference, Washington, DC, USA, 13–17 June 2016; p. 3255. [Google Scholar]
- Corsini, A.; Delibra, G.; Sheard, A.G. The application of sinusoidal blade-leading edges in a fan-design methodology to improve stall resistance. Proc. Inst. Mech. Eng. Part A J. Power Energy 2014, 228, 255–271. [Google Scholar] [CrossRef]
- Avallone, F.; Pröbsting, S.; Ragni, D. Three-dimensional flow field over a trailing-edge serration and implications on broadband noise. Phys. Fluids 2016, 28, 117101. [Google Scholar] [CrossRef] [Green Version]
- Narayanan, S.; Joseph, P.; Haeri, S.; Kim, J.W. Noise Reduction Studies from the Leading Edge of Serrated Flat Plates. In Proceedings of the 20th AIAA/CEAS Aeroacoustics Conference, Atlanta, GA, USA, 16–20 June 2014. [Google Scholar]
- Narayanan, S.; Chaitanya, P.; Haeri, S.; Joseph, P.; Kim, J.-W.; Polacsek, C. Airfoil noise reductions through leading edge serrations. Phys. Fluids 2015, 27, 025109. [Google Scholar] [CrossRef]
- Howe, M.S. Noise produced by a sawtooth trailing edge. J. Acoust. Soc. Am. 1991, 90, 482–487. [Google Scholar] [CrossRef]
- Gruber, M. Airfoil Noise Reduction by Edge Treatments; University of Southampton: Southampton, UK, 2012. [Google Scholar]
- Gruber, M.; Joseph, P.; Azarpeyvand, M. An experimental investigation of novel trailing edge geometries on airfoil trailing edge noise reduction. In Proceedings of the 19th AIAA/CEAS Aeroacoustics Conference, Berlin, Germany, 27–29 May 2013. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rotor Type | Parameter | Relation and Value | |
|---|---|---|---|
| LE | Amplitude (A) | A = 0.1C0 | 2.23 mm |
| Wavelength (B) | B = C0 | 22.3 mm | |
| TE-S | Height (a) | a = 0.1C0 | 2.23 mm |
| Width (b) | b = C0 | 1.93 mm | |
| TE-A | Height (α) | α = 0.1C0 | 2.23 mm |
| Width (β) | β = C0 | 1.93 mm | |
| Rotor Type | LE | TE-S | TE-A | LE-TE-S | LE-TE-A | OR |
|---|---|---|---|---|---|---|
| Volume (×104 mm3) | 1.364 | 1.385 | 1.407 | 1.356 | 1.378 | 1.393 |
| Materials | Tensile Strength (MPa) | Breaking Strength (MPa) | Bending Strength (MPa) | Flexural Modulus (MPa) | Impact Strength (J/cm2) |
|---|---|---|---|---|---|
| PA 12 | 50 | 70 | 80 | 2800 | 23 |
| Resin 9400 | 47 | 33.4 | 67 | 2178 | 27 |
| Materials | LE | TE-S | TE-A | LE-TE-S | LE-TE-A | OR |
|---|---|---|---|---|---|---|
| PA 12 | 13.3 ± 0.5 | 13.7 ± 0.4 | 13.9 ± 0.4 | 13.2 ± 0.7 | 13.4 ± 0.4 | 13.8 ± 0.7 |
| Resin 9400 | 15.7 ± 0.7 | 15.8 ± 1.0 | 16.1 ± 0.8 | 15.0 ± 0.5 | 15.8 ± 0.7 | 15.9 ± 1.0 |
| Speed (rpm) | 3000 | 3600 | 4200 | 4800 | 5400 | 6000 |
| Average Noise Level (dB) | 53.7 | 54.7 | 59.0 | 61.2 | 64.4 | 61.1 |
| Performance | Speed (rpm) | OR | LE | TE-S | TE-A | LE-TE-S | LE-TE-A |
|---|---|---|---|---|---|---|---|
| Thrust (g) | 3000 | 78.6 | 75.2 | 73.4 | 77.4 | 73.2 | 77.6 |
| 3600 | 113.6 | 104.2 | 116.8 | 119.0 | 104.4 | 107.0 | |
| 4200 | 159.0 | 158.6 | 155.6 | 152.6 | 157.0 | 148.2 | |
| 4800 | 218.2 | 188.8 | 199.6 | 216.4 | 181.6 | 201.8 | |
| 5600 | 273.0 | 239.2 | 253.0 | 268.0 | 237.2 | 277.8 | |
| 6000 | 418.2 | 378.2 | 366.6 | 433.4 | 374.8 | 415.0 | |
| Power (W) | 3000 | 8.7 | 8.5 | 8.5 | 8.6 | 8.6 | 8.6 |
| 3600 | 11.6 | 11.4 | 11.2 | 11.6 | 11.3 | 11.6 | |
| 4200 | 15.4 | 15.1 | 14.8 | 15.4 | 15.1 | 15.5 | |
| 4800 | 22.5 | 20.5 | 20.3 | 21.8 | 20.7 | 21.4 | |
| 5600 | 30.2 | 29.3 | 28.7 | 30.4 | 29.3 | 30.6 | |
| 6000 | 50.4 | 45.5 | 43.3 | 51.8 | 46.3 | 50.7 | |
| Noise level (dB) | 3000 | 61.5 | 61.4 | 59.5 | 58.8 | 60.2 | 59.5 |
| 3600 | 64.4 | 64.3 | 62.5 | 62.5 | 63.4 | 63.5 | |
| 4200 | 68.2 | 68.3 | 66.2 | 66.6 | 67.4 | 66.8 | |
| 4800 | 71.9 | 72.0 | 70.3 | 70.0 | 72.1 | 69.9 | |
| 5600 | 76.0 | 75.2 | 73.3 | 75.0 | 76.1 | 74.6 | |
| 6000 | 81.2 | 82.8 | 77.2 | 81.5 | 82.3 | 79.4 |
| Performance | Speed (rpm) | OR | LE | TE-S | TE-A | LE-TE-S | LE-TE-A |
|---|---|---|---|---|---|---|---|
| Thrust (g) | 3000 | 79.8 | 76.0 | 76.6 | 78.0 | 75.8 | 82.0 |
| 3600 | 107.0 | 105.4 | 107.2 | 113.2 | 103.0 | 112.0 | |
| 4200 | 139.0 | 141.0 | 143.4 | 172.2 | 134.8 | 158.0 | |
| 4800 | 188.2 | 184.6 | 189.2 | 208.0 | 176.8 | 191.4 | |
| 5600 | 250.2 | 243.6 | 254.8 | 270.0 | 248.0 | 274.2 | |
| 6000 | 365.8 | 347.0 | 374.2 | 412.4 | 344.6 | 416.4 | |
| Power (W) | 3000 | 8.5 | 8.7 | 8.5 | 8.6 | 8.5 | 8.8 |
| 3600 | 11.2 | 11.5 | 11.4 | 11.4 | 11.2 | 11.8 | |
| 4200 | 14.8 | 15.3 | 14.9 | 15.2 | 14.8 | 15.6 | |
| 4800 | 20.0 | 20.9 | 20.3 | 20.6 | 20.0 | 21.5 | |
| 5600 | 28.5 | 29.8 | 28.9 | 29.6 | 28.5 | 31.1 | |
| 6000 | 42.2 | 47.6 | 44.5 | 49.3 | 42.7 | 52.7 | |
| Noise level (dB) | 3000 | 62.9 | 62.1 | 61.0 | 60.5 | 62.0 | 59.1 |
| 3600 | 66.4 | 65.2 | 64.9 | 63.5 | 65.3 | 62.8 | |
| 4200 | 69.4 | 68.5 | 68.6 | 66.8 | 68.9 | 66.7 | |
| 4800 | 72.7 | 71.4 | 71.9 | 70.1 | 72.2 | 10.1 | |
| 5600 | 76.2 | 76.1 | 76.1 | 74.8 | 76.0 | 74.5 | |
| 6000 | 79.3 | 80.5 | 79.4 | 78.1 | 79.2 | 80.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, W.; Mu, Z.; Wang, Y.; Zhang, Z.; Zhang, S.; Wang, Z.; Li, B.; Zhang, J.; Niu, S.; Han, Z.; et al. Comparative Investigation on Improved Aerodynamic and Acoustic Performance of Abnormal Rotors by Bionic Edge Design and Rational Material Selection. Polymers 2022, 14, 2552. https://doi.org/10.3390/polym14132552
Song W, Mu Z, Wang Y, Zhang Z, Zhang S, Wang Z, Li B, Zhang J, Niu S, Han Z, et al. Comparative Investigation on Improved Aerodynamic and Acoustic Performance of Abnormal Rotors by Bionic Edge Design and Rational Material Selection. Polymers. 2022; 14(13):2552. https://doi.org/10.3390/polym14132552
Chicago/Turabian StyleSong, Wenda, Zhengzhi Mu, Yufei Wang, Zhiyan Zhang, Shuang Zhang, Ze Wang, Bo Li, Junqiu Zhang, Shichao Niu, Zhiwu Han, and et al. 2022. "Comparative Investigation on Improved Aerodynamic and Acoustic Performance of Abnormal Rotors by Bionic Edge Design and Rational Material Selection" Polymers 14, no. 13: 2552. https://doi.org/10.3390/polym14132552