1. Introduction
Molecular structures composed of fullerenes, graphenes and nanotubes have great potential applications in nanotechnology. They can be used as power converters, pumps, water desalination and cooling devices, drug delivery containers, storage shuttles, switches, sensors and nano-oscillators.
Encapsulation of an ion [
1] or a water molecule [
2] into a fullerene makes it possible to obtain such a tool in controlling the movement of fullerene as a free charge [
3] or a dipole moment [
4]. This opens up great opportunities for the development of new nanosized devices. Articles, such as [
5,
6,
7], talk about new applications in water desalination and cooling technologies, energy conversion and targeted drug delivery. The authors of [
8] also propose a fully controlled electromechanical device for pumping liquid at the nanoscale. In [
9], the mechanics of an oscillator in the form of a fullerene located inside a hexagonal packing of a carbon nanotube beam were considered. The authors of [
10] presented a C
60 oscillator placed in a groove of a graphene nanoribbon. In [
11], the interaction of fullerene with a carbon nanotube was studied. The results were obtained both experimentally and using molecular dynamics calculations. In [
12], using the methods of molecular dynamics, results were obtained on the dynamic state of buckyballs enclosed in a carbon nanotube closed at both ends. In [
13], the bending strength of a nanotube containing fullerenes was analyzed. In [
14], based on the theory based on Green’s function method, the properties of charge transfer through the CNT/C
60/CNT system were studied. The authors of [
15] added another Li/C
60/Li to the considered system and showed that these systems radically differ from each other in their physical properties. The articles [
16,
17] present the results of laboratory research and synthesis of nanopods with C
60, C
70 and C
82 fullerenes. In [
18], the dynamic state of fullerenes in similar carbon pods was calculated. However, only the vibrations of fullerenes, that is, the displacements of their centers of mass, were determined.
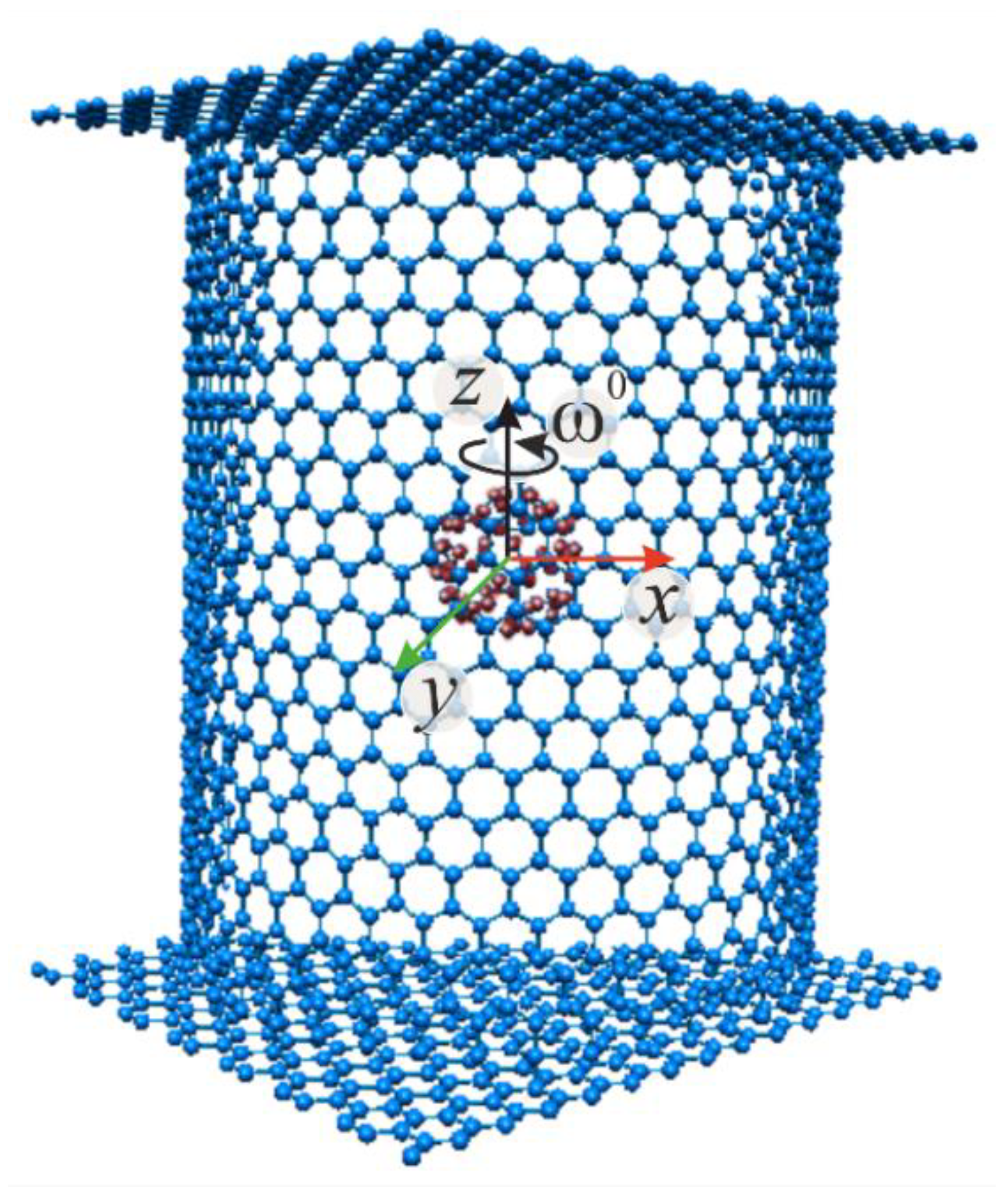
In this paper, we propose a new way to describe the three-dimensional motion of a buckyball based on the use of motion equations for its center of mass, as well as the rotational motion equations written in the absolute basis. A high-precision algorithm for the numerical implementation of the developed approach is also proposed. On this basis, the dynamic state of the buckyball is studied, located in a cylindrical carbon container (
Figure 1), 3.2 nm in diameter, 4 nm high, with flat graphene covers.
2. Materials and Methods
The moving fullerene molecule in our consideration is rigid, i.e., not subject to elastic deformation. In addition, vibrations of carbon atoms in a buckyball are not taken into account. Since the C60 molecule is a fairly large object compared to the volume of a nanocontainer, the processes of conversion of rotational energy into translational energy will play an important role in a detailed description of its movements. The rotation of a supermolecule can be effectively described in terms of the atom–atom interaction approach. The application of this approach reduces the problem of the interaction of supermolecules to the problem of the interaction of a set of force centers, the role of which, in relation to the molecular structures under consideration, is played by carbon atoms. Thus, interactions of each C60 atom with all atoms in the fullerene environment will be included in the calculation. Within the framework of the considered approach, fullerene rotations around its own center of mass can be determined on the basis of the theorem on the change in the angular momentum of a rotating object. The left side of the notation of this theorem includes the time derivative of the angular momentum and the right side is the sum of the moments of forces acting on the force centers of the fullerene.
When considering the motion of immutable molecular structures, representative points are naturally identified. Such points are the atoms that make up the structures under consideration. In this case, the position of the structure in space is completely determined by the coordinates of these points. Thus, if we include the coordinates of atoms in the number of unknown functions and find kinematic relations to determine these coordinates, then we can build a solution to the problem of the position of a molecular structure in space in an absolute basis, i.e., without Euler angles. The mentioned kinematic relations in essence express the theorem of addition of velocities for the complex motion of representative points.
If in a macroscopic body, we introduce into consideration three representative points that do not lie on one straight line, then this method can be used to determine the position in space of the so-called “solid” bodies. However, in this case it is necessary to tabulate the instantaneous values of all components of the inertia tensor. This can be done in advance before solving the problem of determining the orientation of the body in space.
Fullerene rotation is described by equations for the angular momentum projections. These equations in the absolute basis have the form:
Here are the coordinates for the fullerene center of mass; xk, yk, zk—coordinates of carbon atoms in fullerene; N1 is the number of atoms in fullerene; are the projections of the angular momentum.
Equations (1)–(3) are considered as equations for determining the angular velocity projections of the molecular structure in the absolute basis. Since these quantities enter under the sign of the differential in (1)–(3), the initial conditions are needed for the angular velocity components:
The resulting projections of the forces acting on each individual fullerene atom are determined by the following sums:
where
N2 is the number atoms in nanocontainer;
—interaction potential of the
kth fullerene atom and the
jth nanocontainer atom;
—distances between atoms. In the present calculations, we take it in the form of classical
LJ-potential with a reduced value of the characteristic interaction energy, since both carbon atoms are in the bound state in molecular structures, i.e., are not free. Nevertheless, this potential, like any other interaction potential of two neutral atoms applied to molecular fragments, makes it possible to isolate potential wells near the surfaces of the nanocontainer. The resulting potential wells make the potential field of interactions inhomogeneous.
It is easy to show that the projections of the angular momentum are defined as the result of the product of a string representing the vector of instantaneous angular velocity and the inertia tensor of a rotating object:
In this case, the components in the inertia tensor are determined by the following formulas:
Here m is the mass of a carbon atom.
The atoms that make up the fullerene participate in a complex movement, namely, together with the center of mass of the fullerene and in rotations around it. Since the velocity addition theorem is valid for a complex motion, the corresponding additive formulas will be valid for the coordinates of the points involved in the complex motion. Therefore, the coordinates of carbon atoms in a molecule fullerene are determined as follows:
These differential equations are integrated under the following initial conditions:
Index zero at the top means the initial values of the coordinates.
The coordinates and velocities of the moving center of mass of the molecule obey the following differential equations:
Here
M is the fullerene mass.
3. Calculation Scheme
Let
be the Cartesian coordinates of the atoms of the molecule on the
nth time layer. Here and below, for reasons of notational simplicity, we will omit the subscript “
k” of the quantities under consideration. The angular velocity components
will also refer to the
nth time layer. In particular, for
n = 0, these are the initial values of the required quantities. Since we use a scheme that formally has the fourth order of computational accuracy with respect to the time step, its implementation requires the calculation of the desired values at four positions of each individual time step. Thus, in the following notation,
are coordinates in four intermediate positions. Here, the first index corresponding to the number of carbon atoms in the fullerene is deliberately omitted (for ease of notation). Obviously, the values in the first position should be:
These values, as well as formulas (6)–(9), calculate in this position.
Before finding the coordinate values in the second position of the time step, it should be remembered that for the complex movement of a node in a molecular structure, the velocity addition theorem is valid:
Here
are the atomic velocities arising due to the rotation of the molecule about its center of mass. Taking into account (15), we calculate the coordinates of the nodes in the second position:
The projections of the angular momentum in this position will be as follows:
Substituting into the left parts of the last relations of representation (6)–(8), we obtain the values of the projections of the angular momentum in the second position:
We obtain a system of three linear algebraic equations for
values of fullerene angular velocity projections in the second position. Now, using relations (13), we find:
When the projections of the angular velocities in the second position are found and with the help of (13), the projections of the velocities of the center of mass in the same position are found, it is possible to determine the coordinates of the nodes in the molecular structure already in the third position:
Here ur2, vr2, wr2 are the values of the velocity rotational component in an individual fullerene carbon atom in the second position.
Since new coordinates
have been found, it is not difficult to calculate new values for the projections of the moments of forces and the components of the inertia tensor from them. As a result, all coefficients in the linear system of algebraic equations will be determined:
From the last system, using Cramer’s rule, we find the projections of the angular velocity of the molecule in the third position of the time step. At the end of the third step, we must not forget to calculate the projections of the velocities for the center of mass:
When obtaining coordinates and velocities in the fourth position, not
, but a full time step is used; therefore:
Then the coordinate values at the new time step can be found using the formulas:
The aim of the study is to research the character of fullerene C
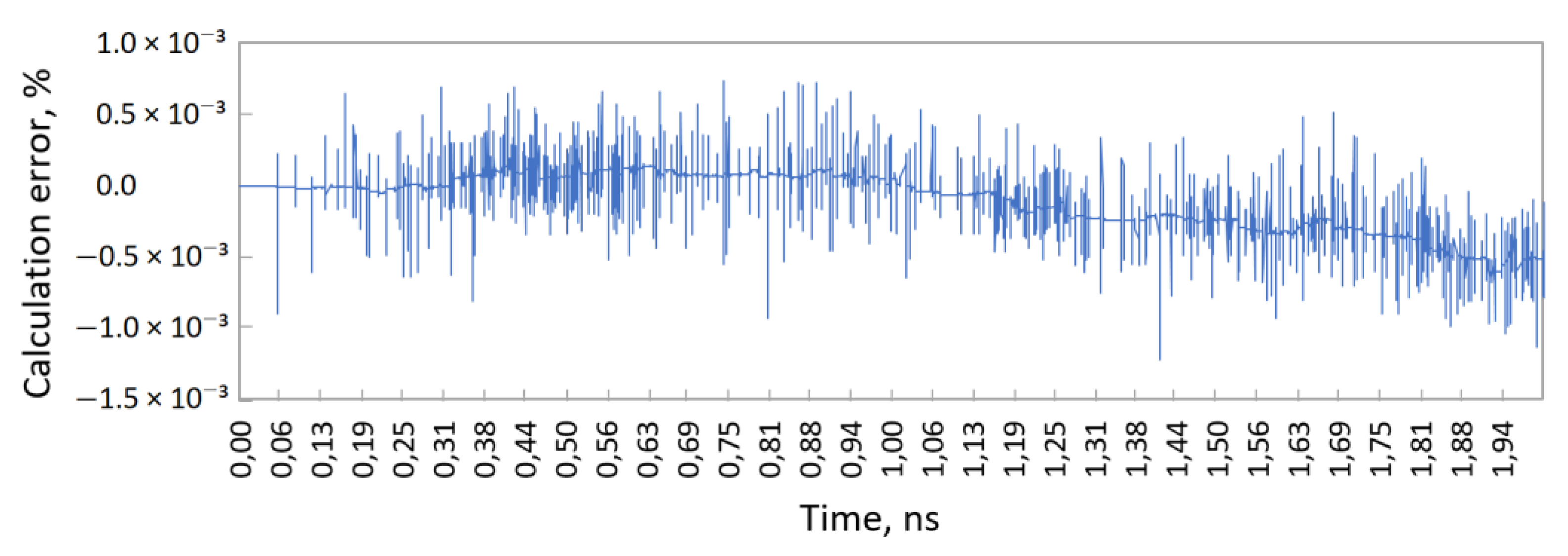
60 motion in the potential field of van der Waals forces of a stationary cylindrical nanocontainer. In turn, fullerene is a free object that has the ability to move inside the container and has kinetic energy. To check the accuracy of the calculation, we observed the balance of the system total mechanical energy:
Here, J is the moment of inertia relative to the instantaneous axis of rotation; ω is the instantaneous value of the angular velocity of the fullerene; M is the fullerene mass; v is the velocity of the center of mass in the fullerene; are the distances between atoms belonging to different molecules—the fullerene and nanocontainer.
4. Results and Discussion
The nature of the motion of C60 fullerene in a cylindrical stationary carbon nanocontainer with flat rectangular graphene covers was studied by calculation. We followed the trajectory of the center of mass of the fullerene and the projections of its angular velocities on the axes of the absolute basis. It should be noted that at small intervals of motion, the energy exchange between the container body and the fullerene is insignificant. Therefore, up to a certain point in time, the system can be considered Hamiltonian. However, some general trends can be identified at this initial stage of development in the process.
The balance of total mechanical energy is shown in
Figure 2. It can be seen that the relative value of the error in calculating the Hamilton function is 5 × 10
−4% or 5 × 10
−6% relative units. This is a high accuracy in calculations, if we take into account that multiple fullerene impacts on the container walls are realized.
At the initial moment of time, the fullerene is in the center of the container, its center of mass is at rest and the angular velocity vector had a direction along the container axis: . Since this position is not an equilibrium position, the fullerene begins its movement towards the zones of most probable occurrence. Such zones are potential wells near the walls of the container.
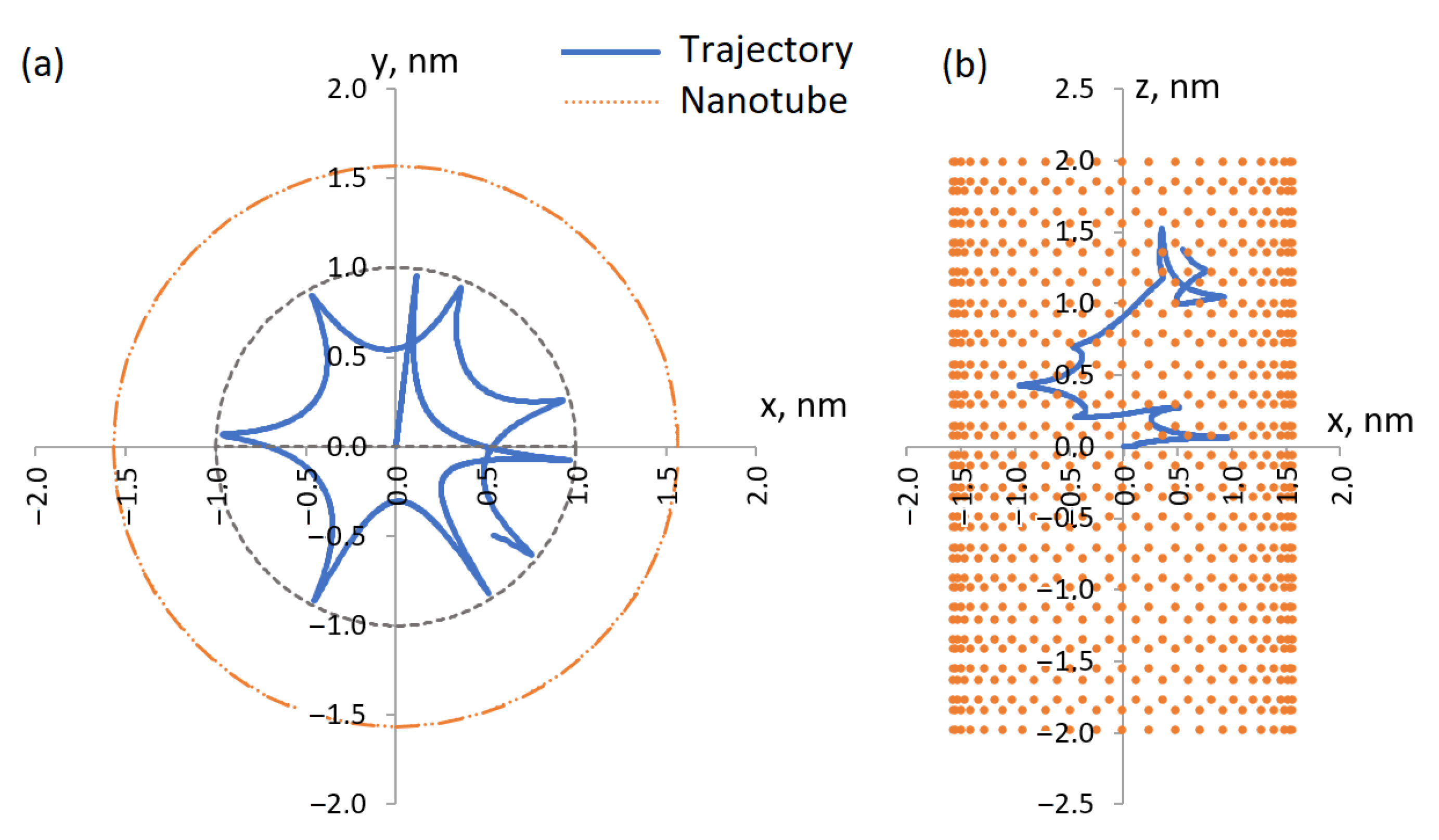
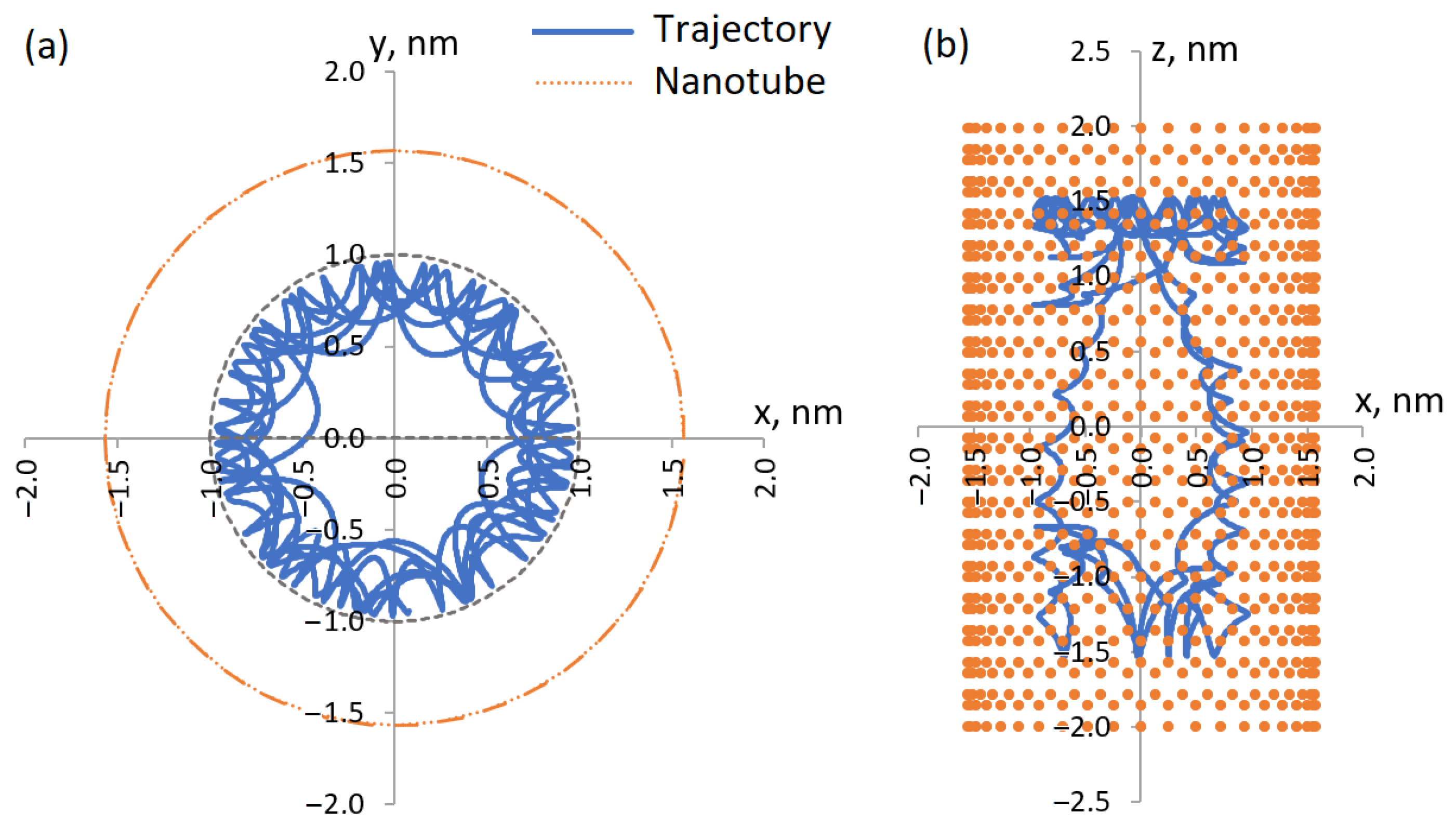
In order to understand the nature of fullerene motion, the entire calculated time interval was divided into successive intervals. On the left in each of the figures below, the projection of the trajectory of the center of mass of the fullerene onto the
xy plane is shown and on the right, onto the
xz plane. Both of these flat figures in their totality give some idea of the spatial character of the fullerene motion.
Figure 3 shows the very initial phase of the buckyball movement.
It can be concluded from the figure that the fullerene initially falls almost radially onto the side surface of the container, i.e., moves to the nearest potential well. Over time, the action of the end potential well increases and the buckyball, along with radial and circumferential displacements, acquires speed in the axial direction. If we take into account the axial projection of the fullerene trajectory (left images in
Figure 4,
Figure 5,
Figure 6 and
Figure 7), we clearly see fullerene jumps from one position to another. Since the presented mathematical model already includes an ideally elastic interaction with the container walls, the main element in the buckyball movement near the barrier and the carbon material is the jump. In other words, the fullerene in the nanocontainer bounces, like a tennis ball hitting a hard surface. At the same time, it is not in the field of gravitational influence, but in the field of van der Waals forces, which have a resulting direction towards the closest walls of the container.
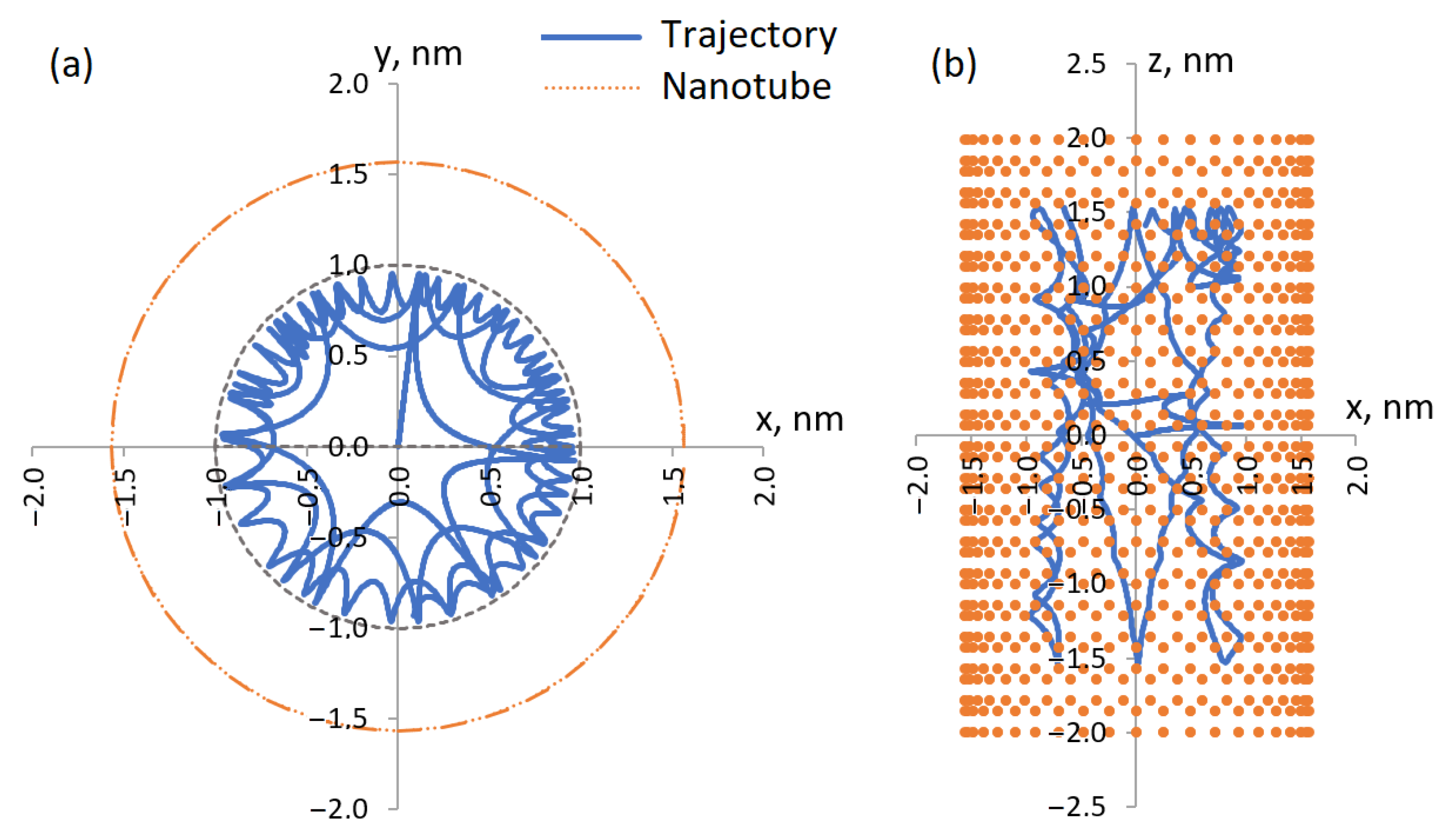
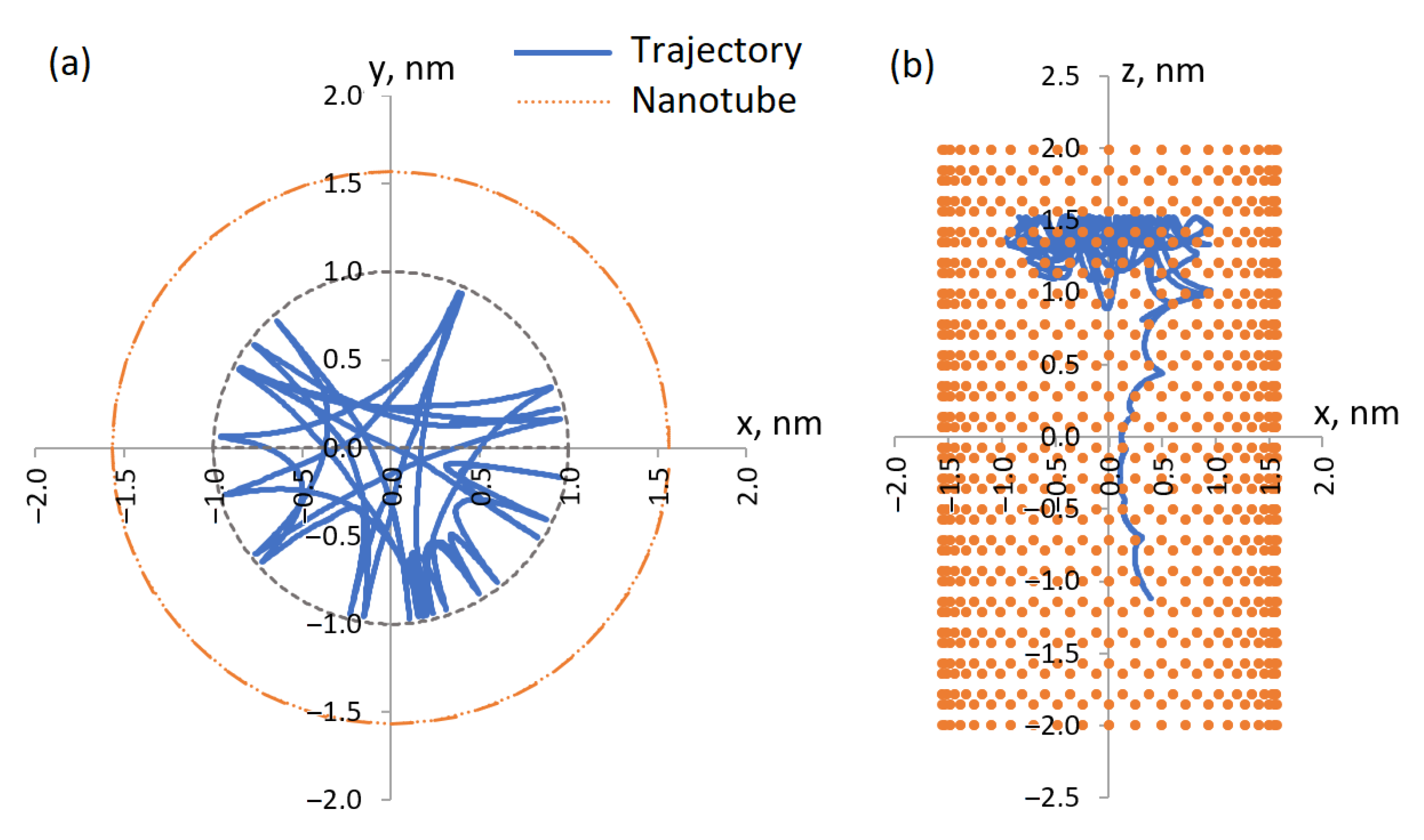
Figure 4 shows motion over a time interval of up to 0.5 ns.
At this time interval, there is a decrease in the height of jumps and an increase in their frequency. Moreover, the movements of the buckyball are realized in the potential wells of the side surface of the nanocylinder.
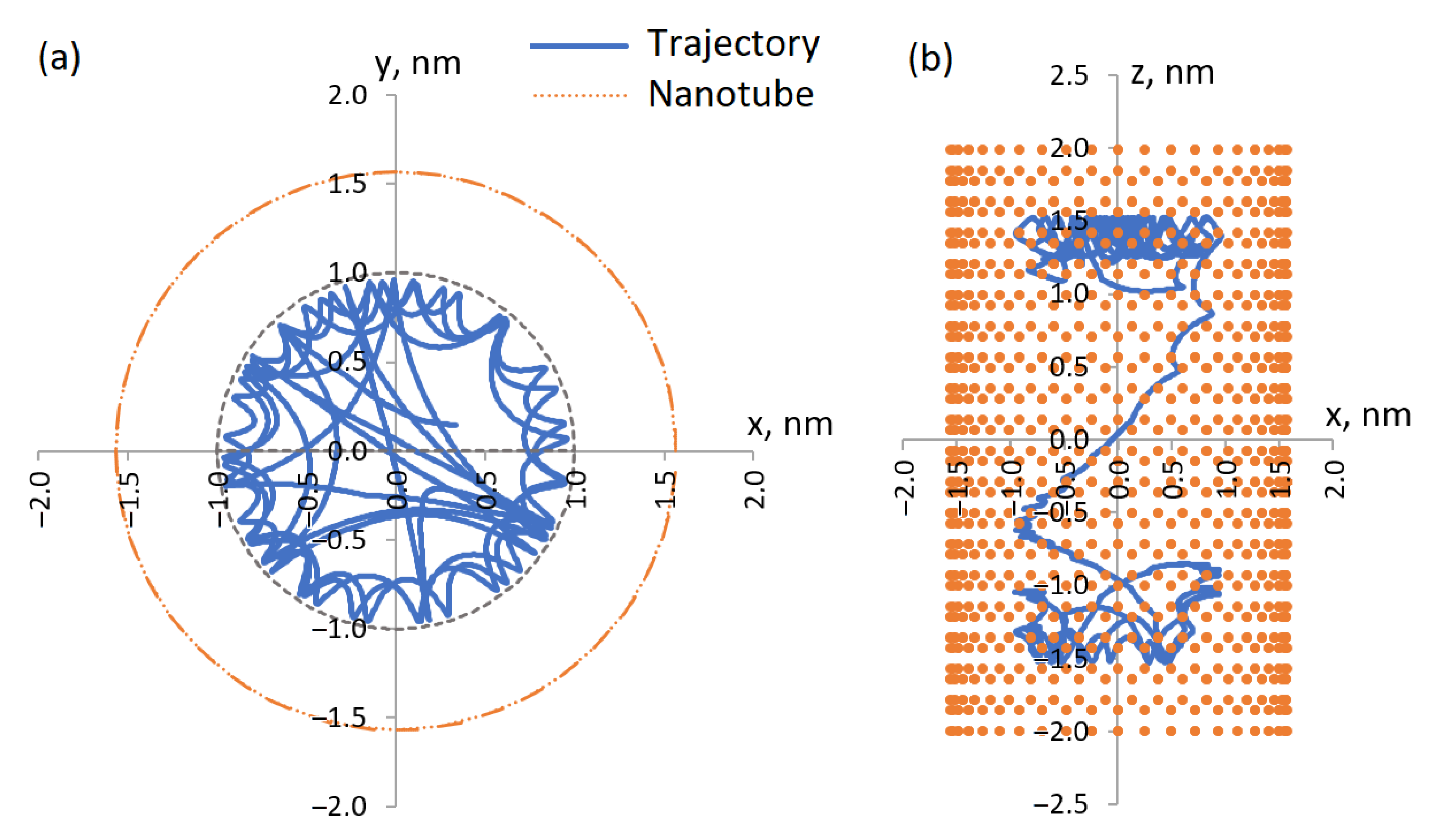
In the next interval from 0.5 ns to 1.0 ns (
Figure 5), the motion remained the same, but a zone of thickening for the trajectories appeared near the top cover of the nanocylinder.
At the time intervals shown in
Figure 6 and
Figure 7, the nature of the movement changed somewhat: buckyball jumps began to occur at the end surfaces. Diametrical and almost diametrical crossings also appeared here, after which there is a transition along the side surface of the container on the other cover, where the fullerene enters a new end zone of attraction. In this regard, the most likely areas for the presence of a buckyball in the container are potential wells near flat covers.
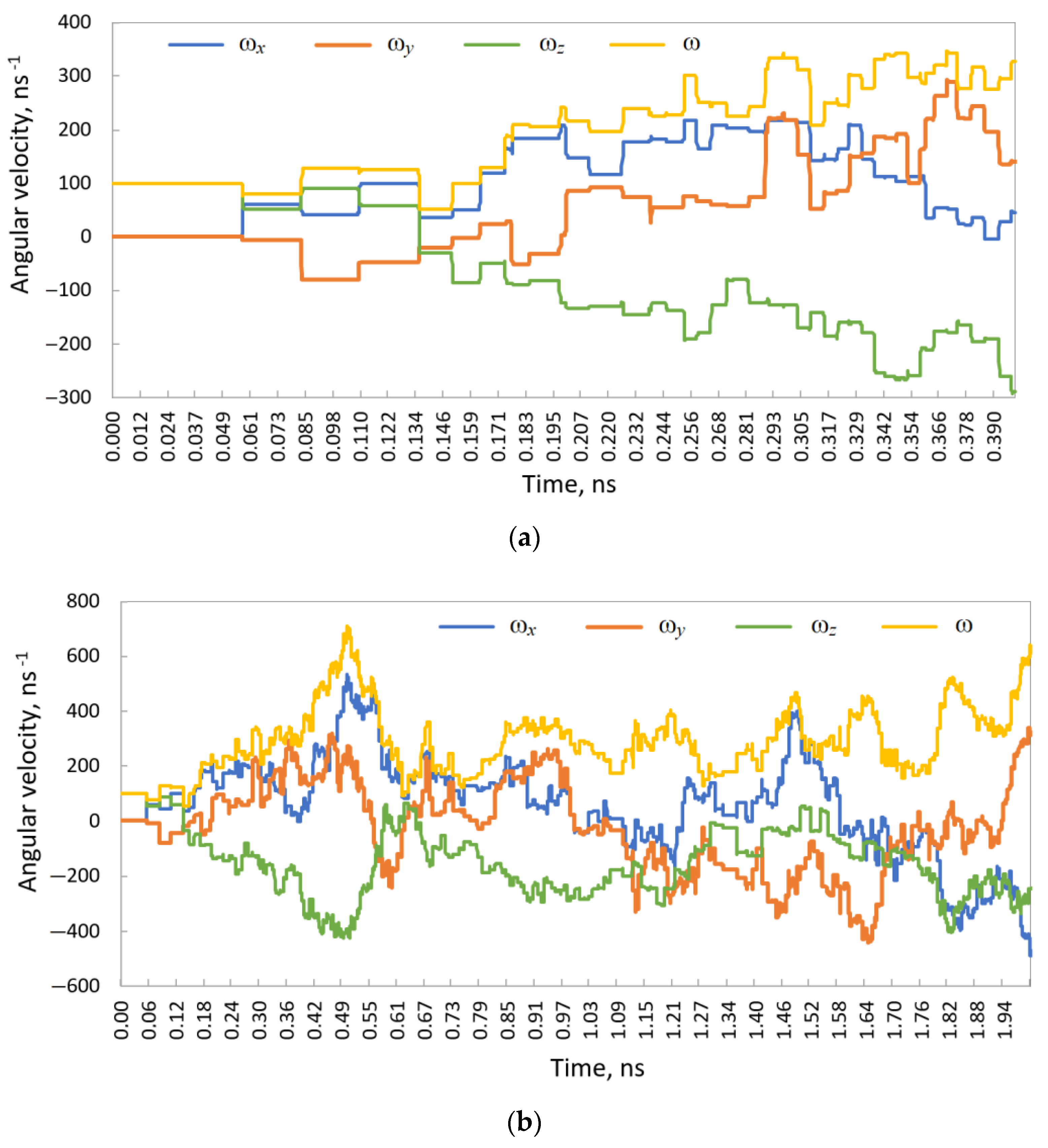
In the process of fullerene moving along the admissible positions inside the nanocontainer, a significant change in its kinetic energy components occurs. For example, in potential wells near the walls, the speed of the center of mass in the buckyball and its angular velocity noticeably increase. In this case, the fullerene rotation energy changes abruptly, immediately after approaching the limiting surface of the container and after approaching; as before, it has a constant value (
Figure 8a).
In other words, the rotational energy is quantized because the angular velocity is quantized, both in magnitude and in direction. This stepwise transition is realized with each hit against the wall. The same thing happens with an ordinary ball or a billiard ball when it interacts with the sides. The graph in
Figure 8b shows the periodic nature of the global change in rotation speed.
5. Conclusions
The developed approach makes it possible to describe, in detail, any fullerene motions, in particular, its rotations and displacements with multiple impacts against the walls of the nanocontainer. As a result of these impacts, the energy of rotation changes abruptly. At the same time, it has constant values between beats. The main way to move the fullerene inside the container is to jump from one position on the container walls to another. When the fullerene center enters the potential well and moves predominantly in a direction tangential to the walls, the height of the jumps decreases and the frequency increases. Potential wells near the flat covers of the container are the most probable areas for the presence of fullerene, which is initially located in the center of the container.
The proposed approach for describing the motion of fullerenes is valid for any large and unchanging molecular structures during the motion. Moreover, it is valid for describing the rotations of the so-called “solid” bodies. For this, however, it is necessary to have tabulated values of the axial and centrifugal moments of inertia in the body, previously found for all possible directions of the coordinate axes.


 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







