

Design, Analysis and Experiments of Hexapod Robot with Six-Link Legs for High Dynamic Locomotion


Abstract
:1. Introduction
- This mechanism can realize a transformation from small input motion to large output motion.
- Comparing the two methods mentioned above, the method using this mechanism has stable transmission, low wear, large payload, and low cost.
- This method has the advantages of easy processing, reliable working member, and easy lubrication.
- We proposed a six-link leg mechanism and applied it to a hexapod robot that can significantly improve the dynamic locomotion of the hexapod robot. We completed the kinematic modeling of this mechanism.
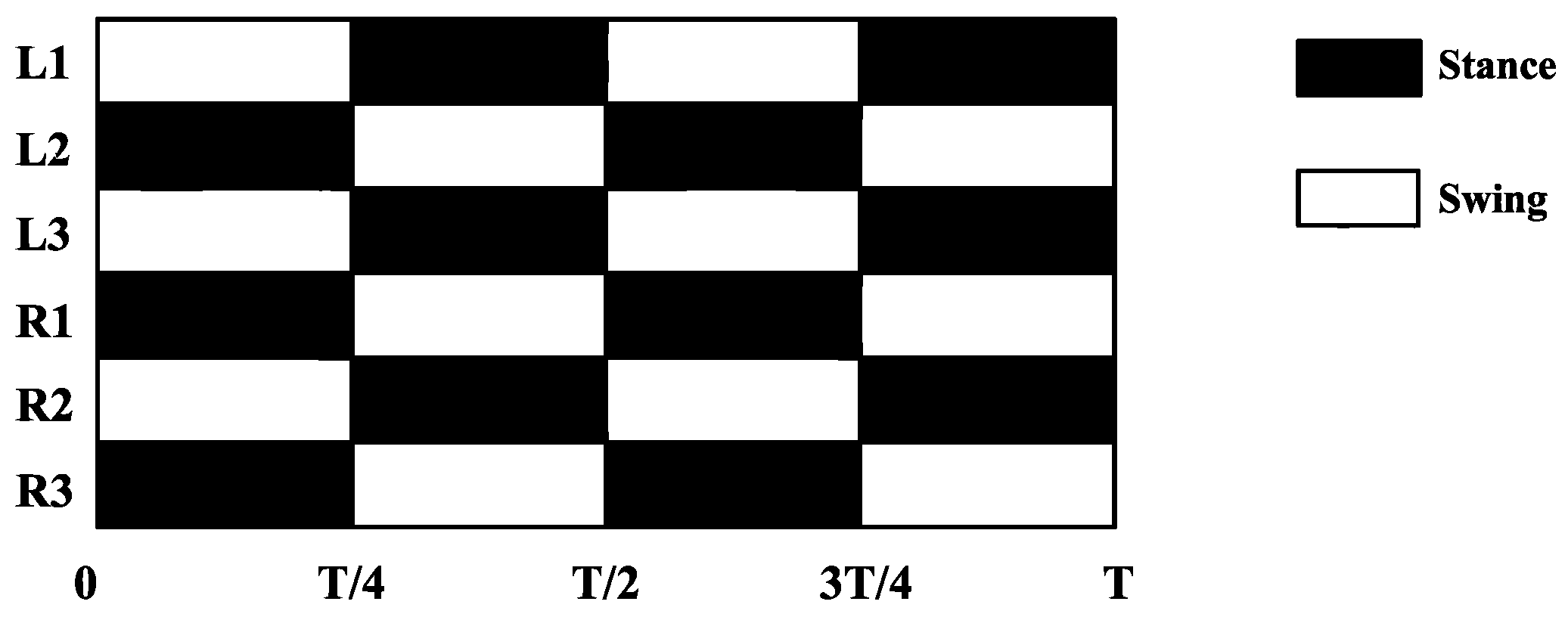
- We completed the single-legged foot-end trajectory planning of this hexapod robot based on the kinematic model. We introduced bipod gait into the gait planning of the hexapod robot, which enabled the leg mechanism to be more effective, and significantly improved the dynamic locomotion capability of the hexapod robot.
- We completed the motion simulation of a single leg and verified the high dynamic motion capability of this mechanism. We completed the physical prototype experiments to verify the feasibility of bipod gait with this mechanism to achieve highly dynamic walking of a hexapod robot.
2. System Overview
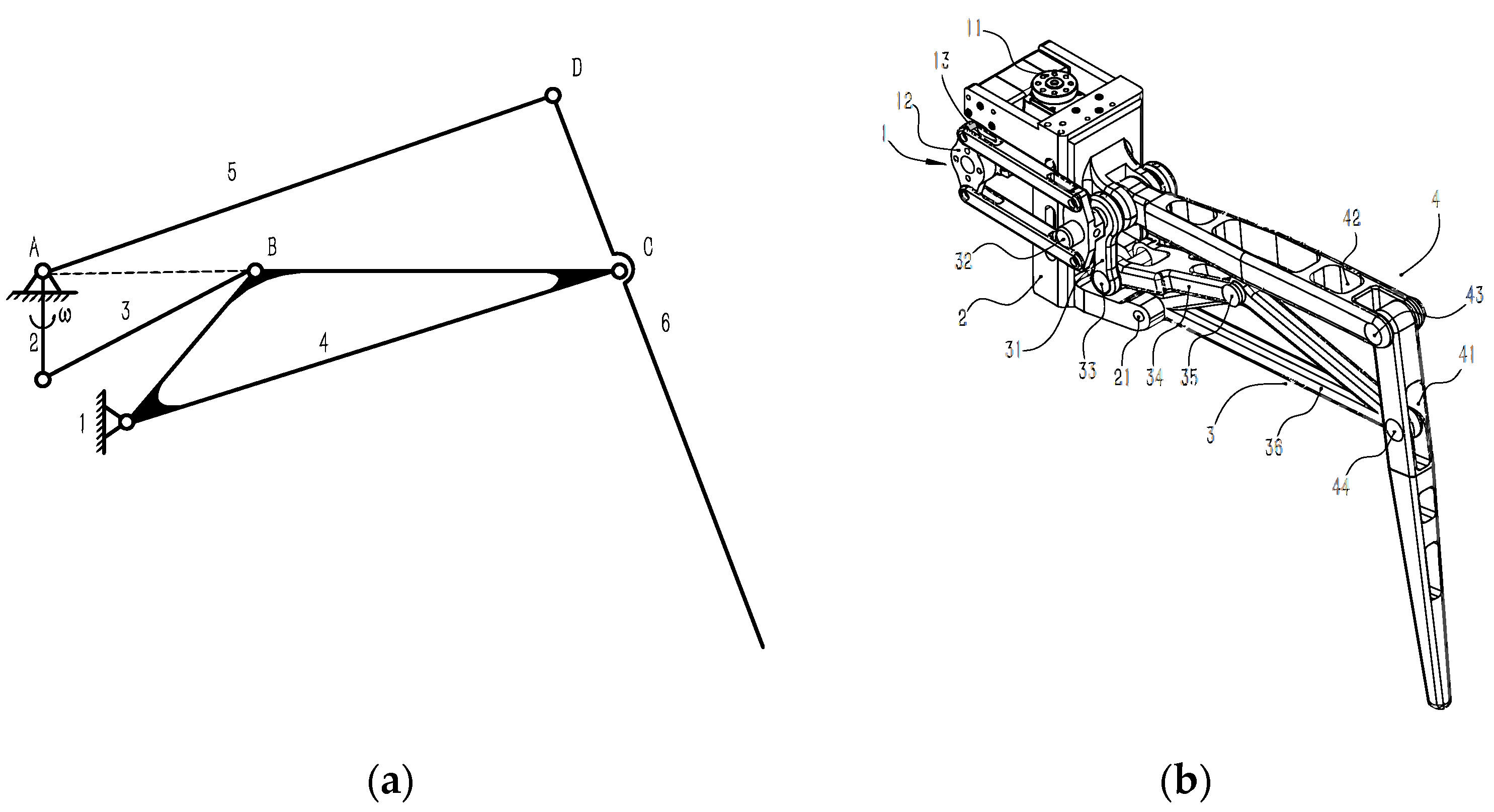
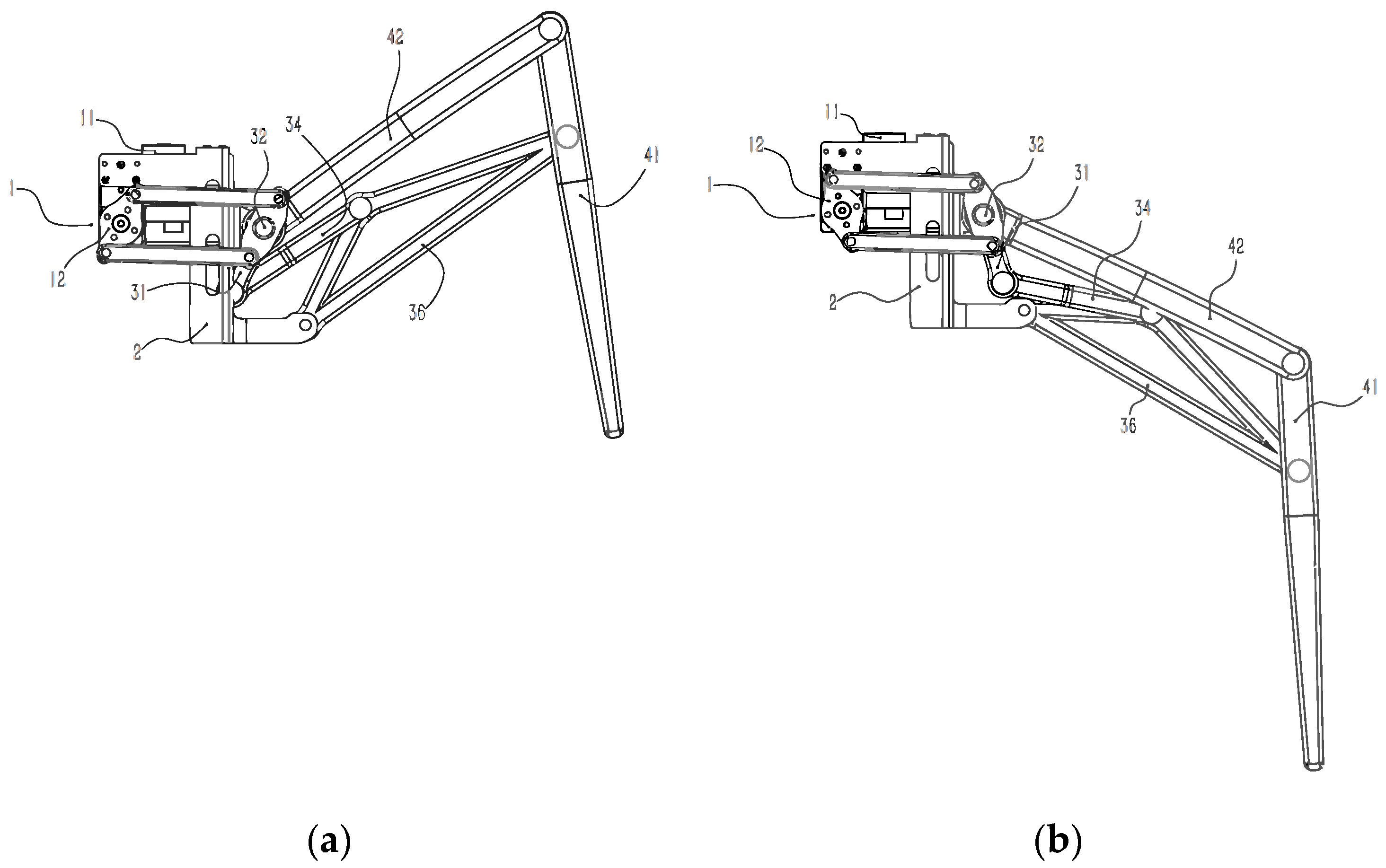
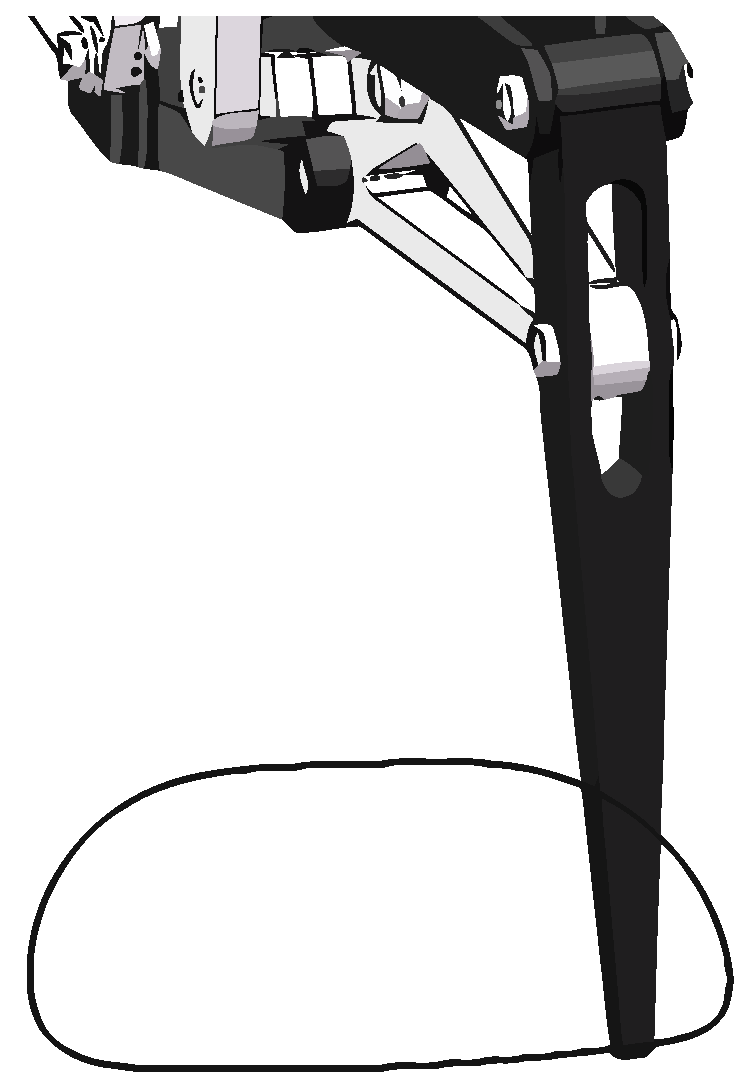
2.1. Selection of Leg Mechanism
- The specially designed linkage mechanism makes the leg move up and down within a wider range and the foot end easier to lift. In other words, when the steering gear rotates at the same angle, the foot end can move up a larger distance to enhance its ability to climb over obstacles in high-speed motion.
- The lighter weight of the linkage mechanism solves the problem of large joint mass.
- The centralized placement of steering gear lowers the leg’s moment of inertia and enhances its agility, providing the foundation for the high dynamic movement of the whole robot.
- This design is more convenient for wiring, which can better protect the steering gear to cope with more harsh environment.
- The U-shaped opening can reduce the mass and increase the working space, as the prime mover is frame-shaped, the connecting rod 34 is provided with a U-shaped opening facing the connecting rod 36, and the obtuse end of the connecting rod 36 is located in the U-shaped opening.
- Two degrees of freedom can reduce the difficulty of control.
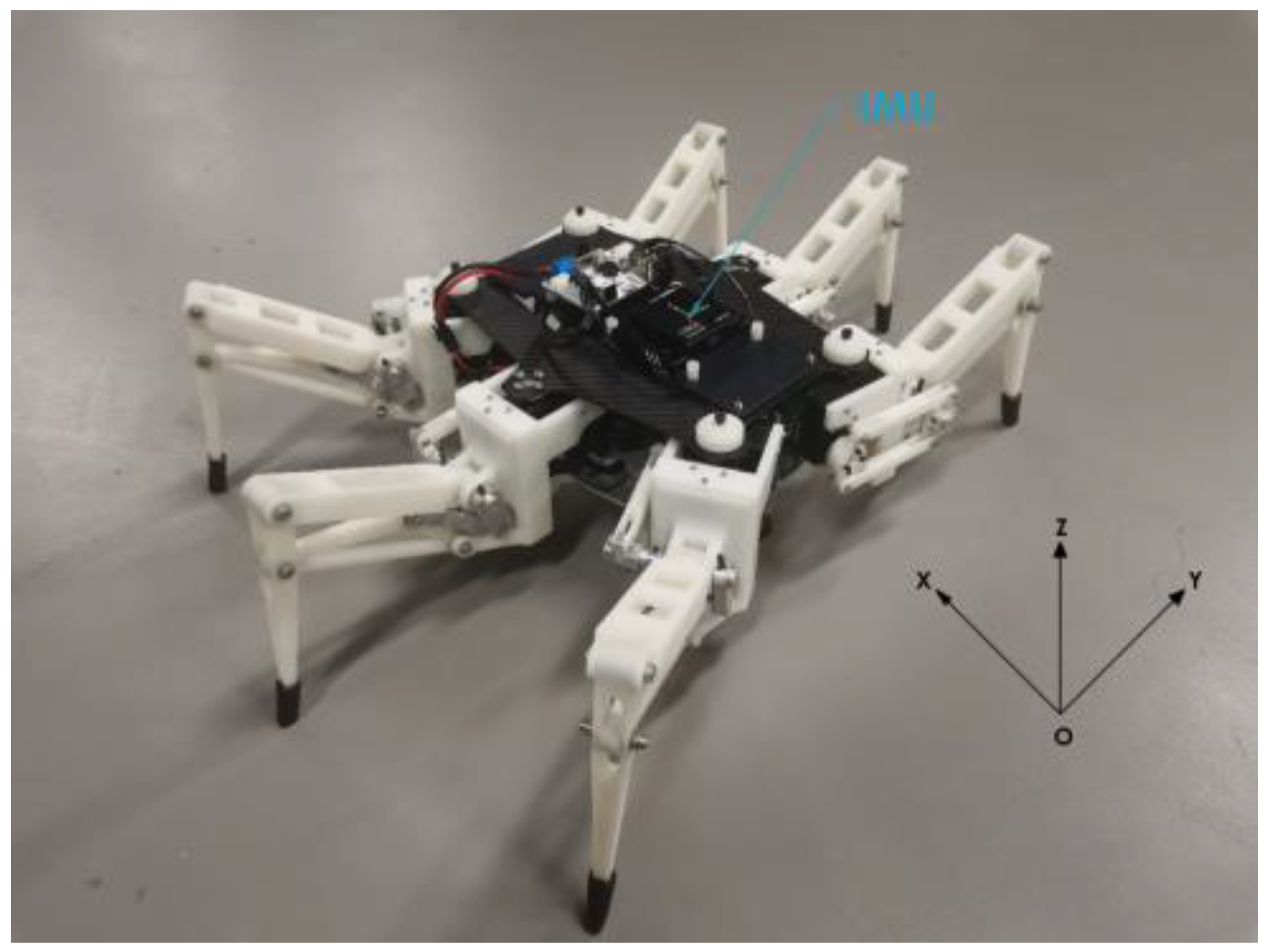
2.2. Selection of Body Base and Overall Mechanical Structure
3. The Theoretical Analysis of The Robot Movement
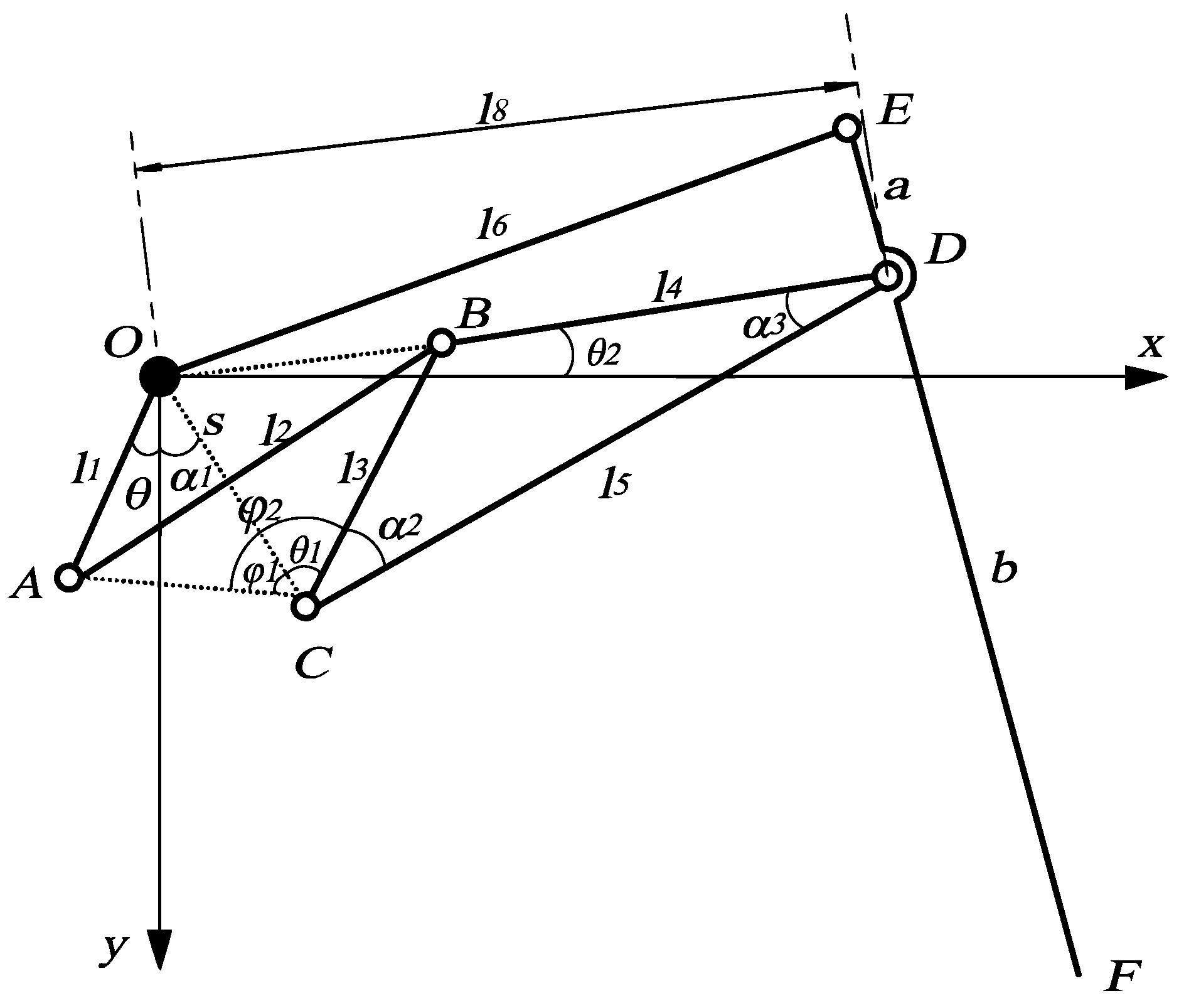
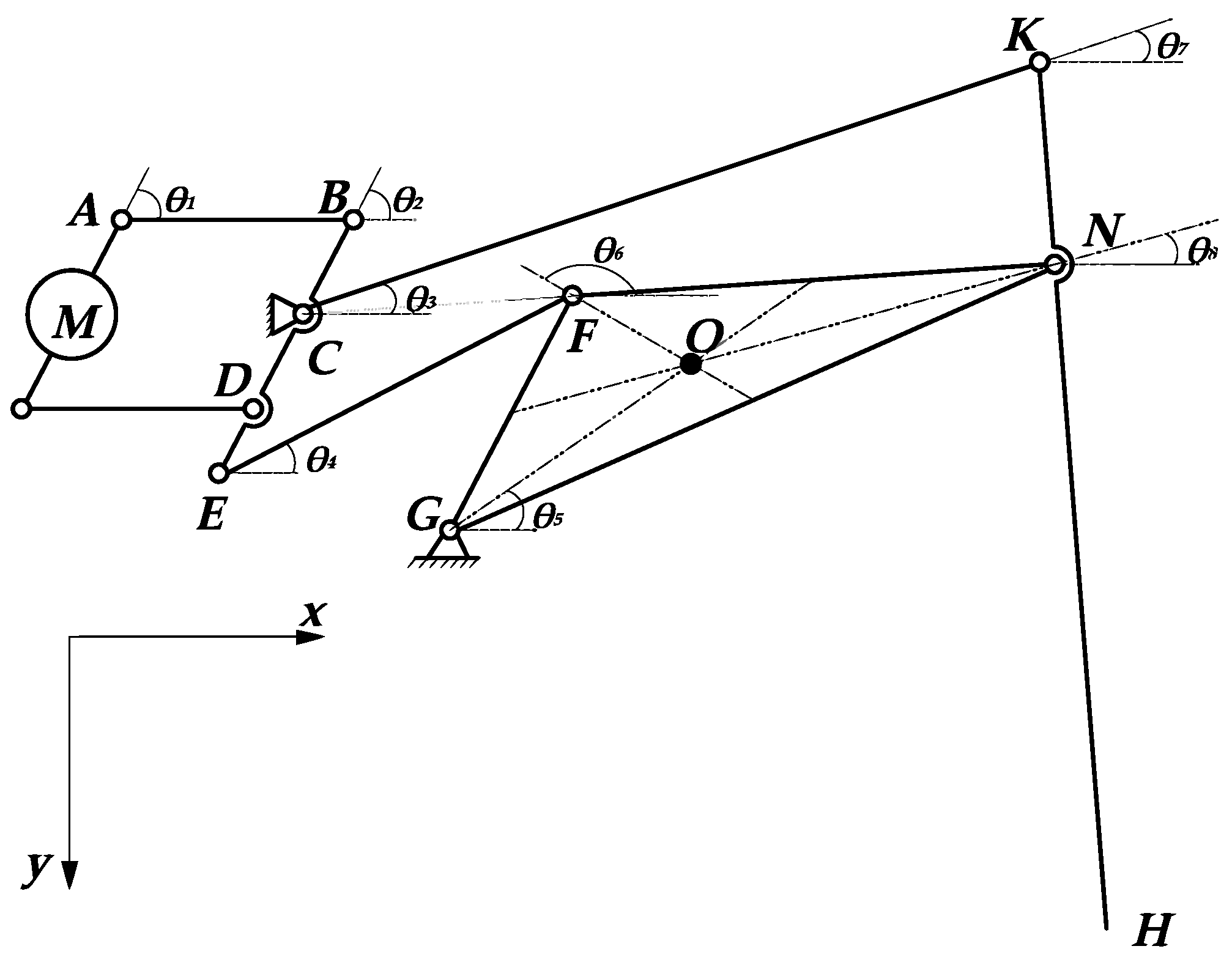
3.1. Kinematics Analysis
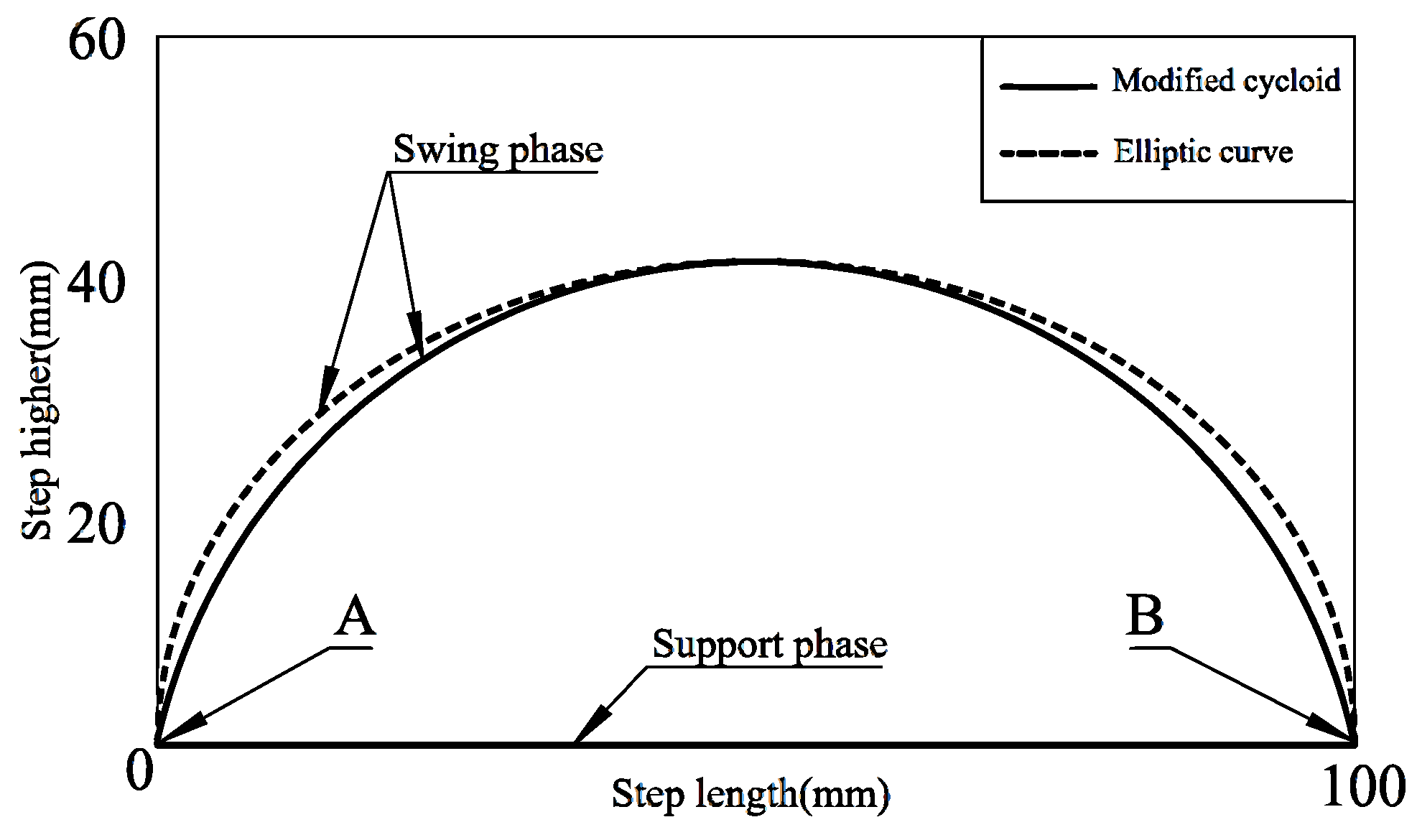
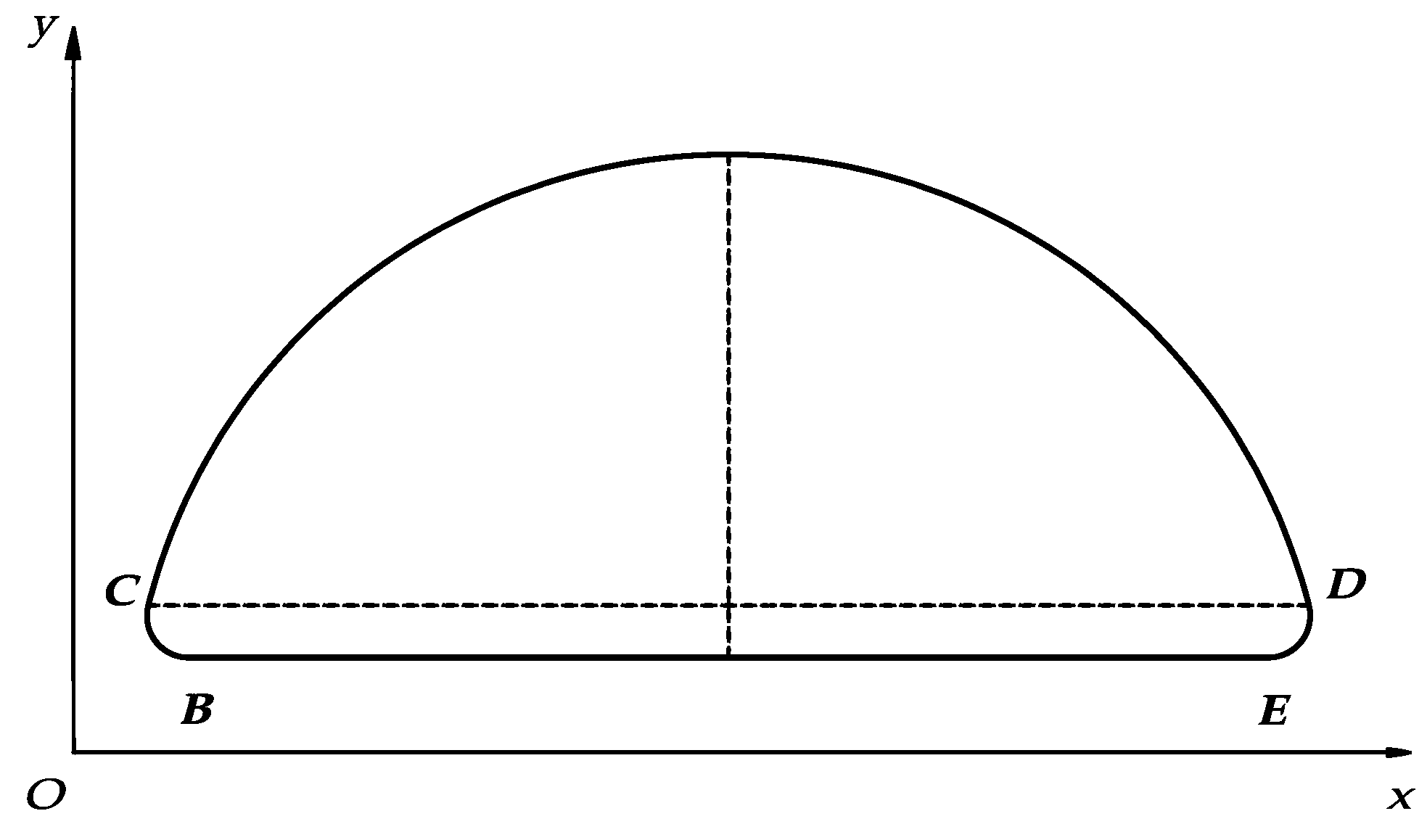
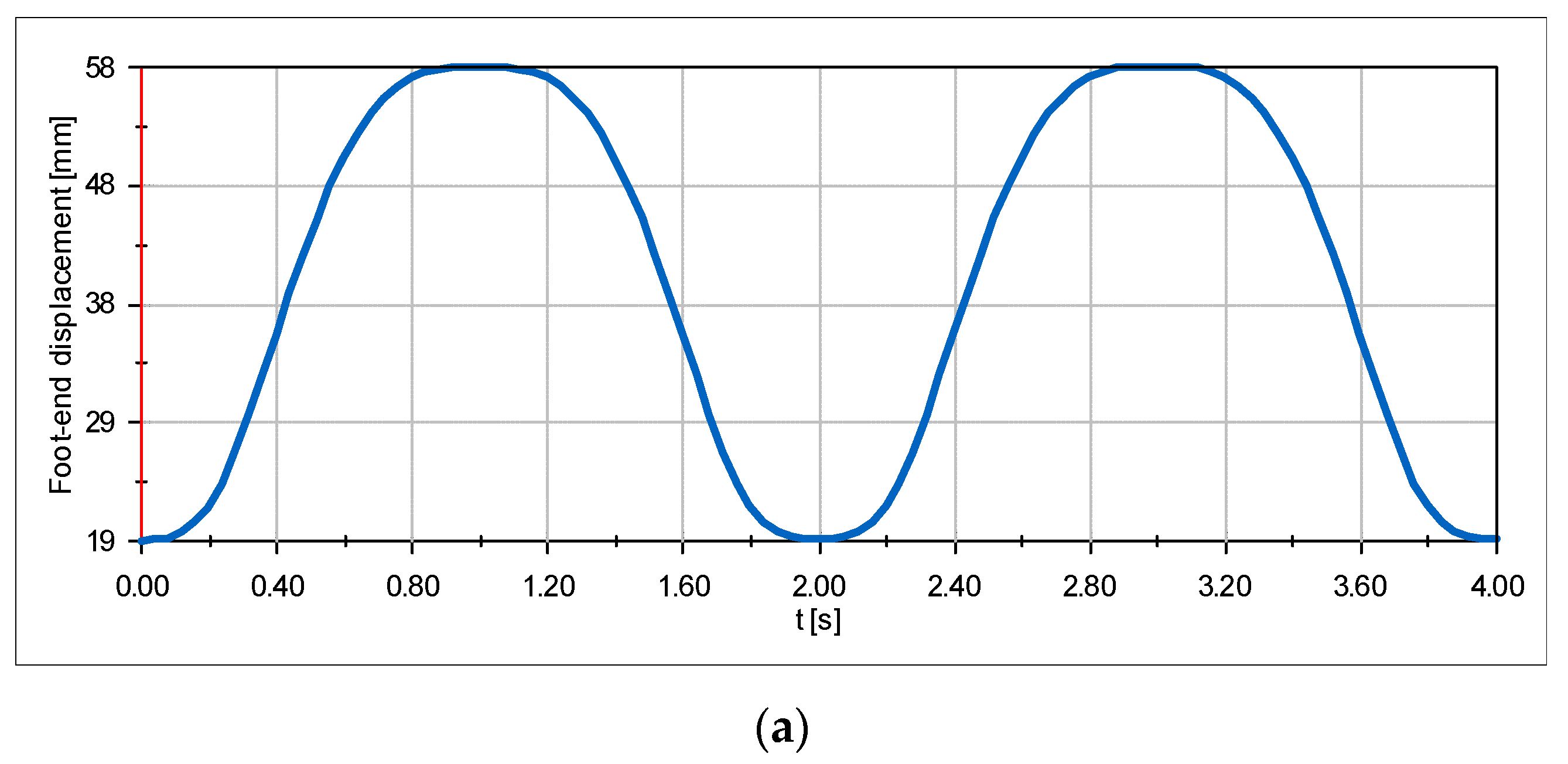
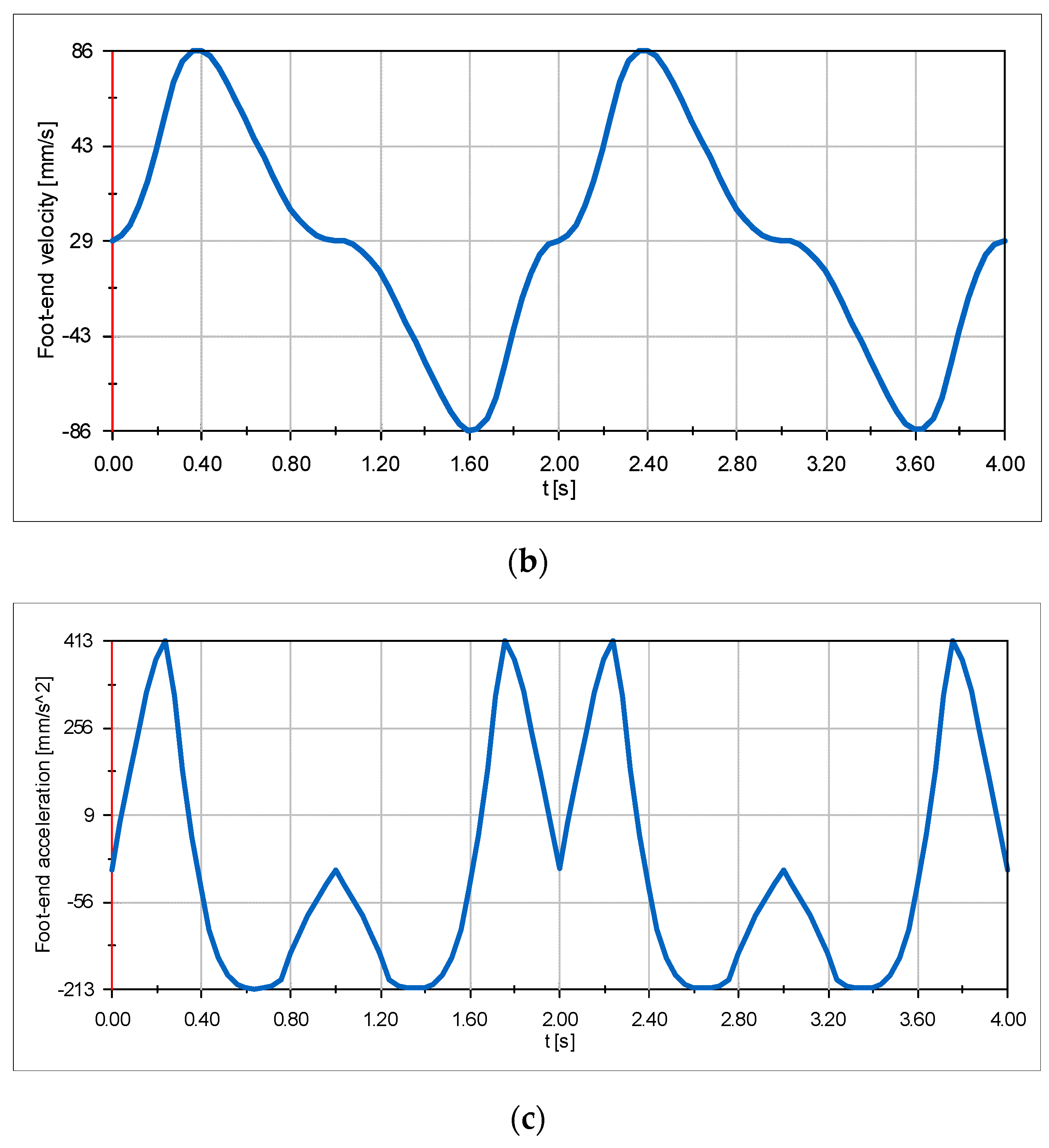
3.2. Foot Trajectory Planning
- The trajectory of the foot should be a continuous and smooth closed curve, with no sudden change in speed and acceleration.
- There is no impact between the leg movement and the ground, that is, the speed and acceleration when landing and leaving the ground are 0.
- Try to avoid unnecessary exercise.
- The length R is subtracted from the left end of the swing phase and the left end of the support phase to construct the retraction transition curve. As shown in Figure 6, the trajectory consists of .
- Let the coordinates of point B and point C be and , and their velocities and accelerations can be expressed as , , and . Then, from the coordinates of points B and C, the expression of the trajectory can be written as a quintic polynomial function.
- The expressions of velocity and acceleration can be obtained by taking the first derivative and the second derivative of the expression of BC, respectively:
3.3. Leg Dynamics Analysis
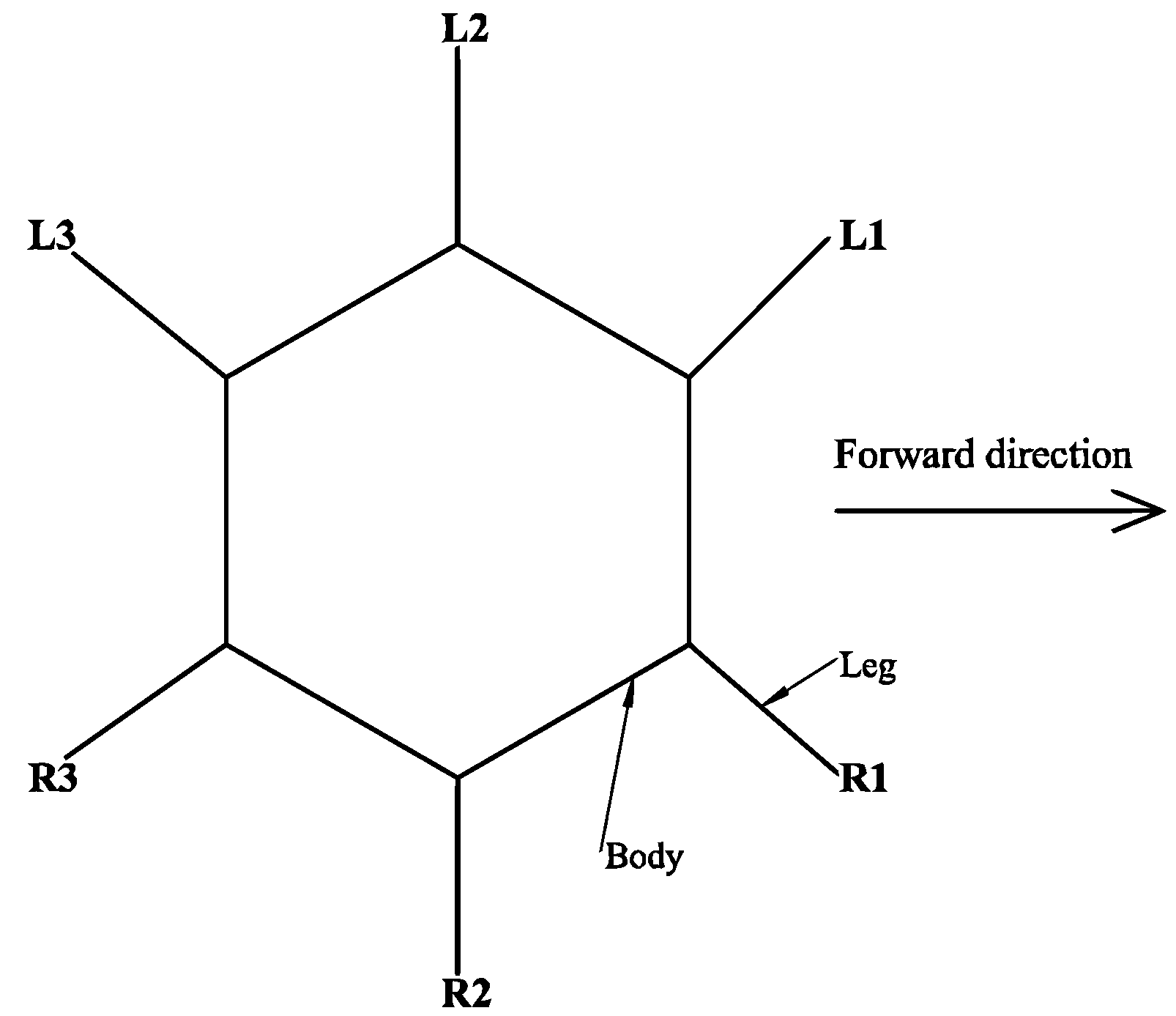
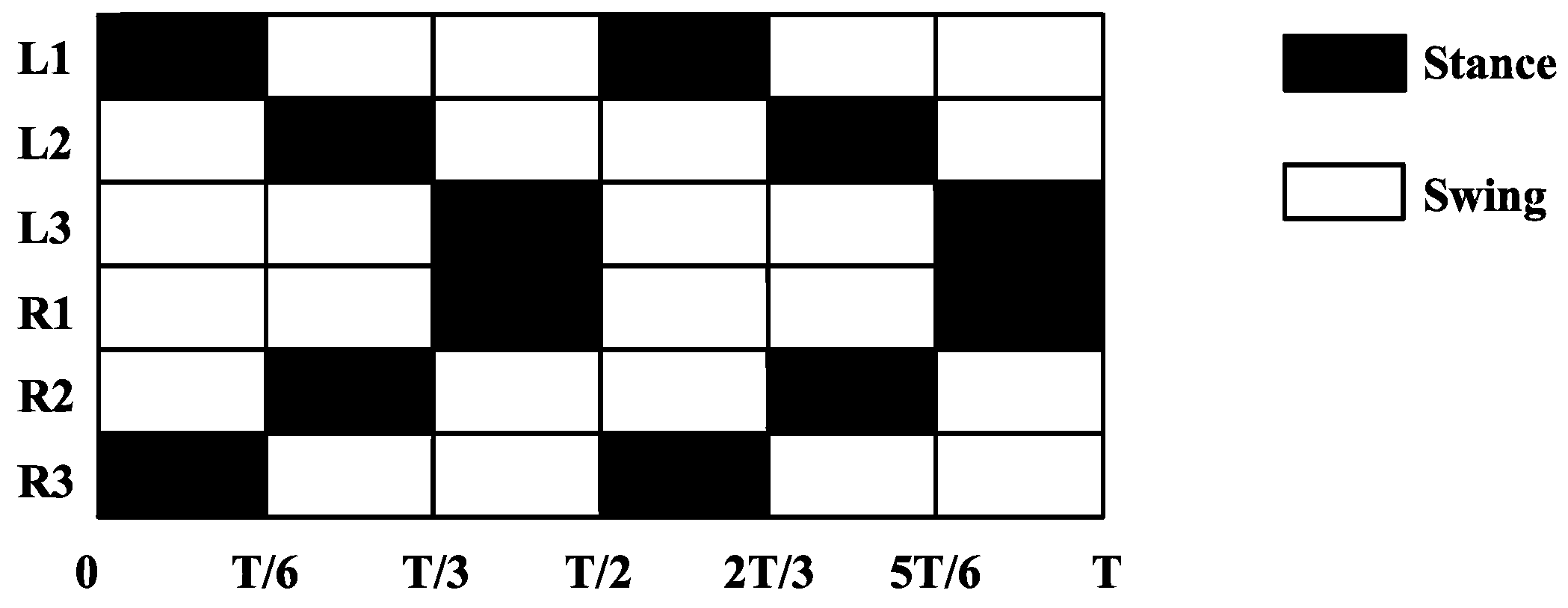
3.4. Gait Planning and Analysis
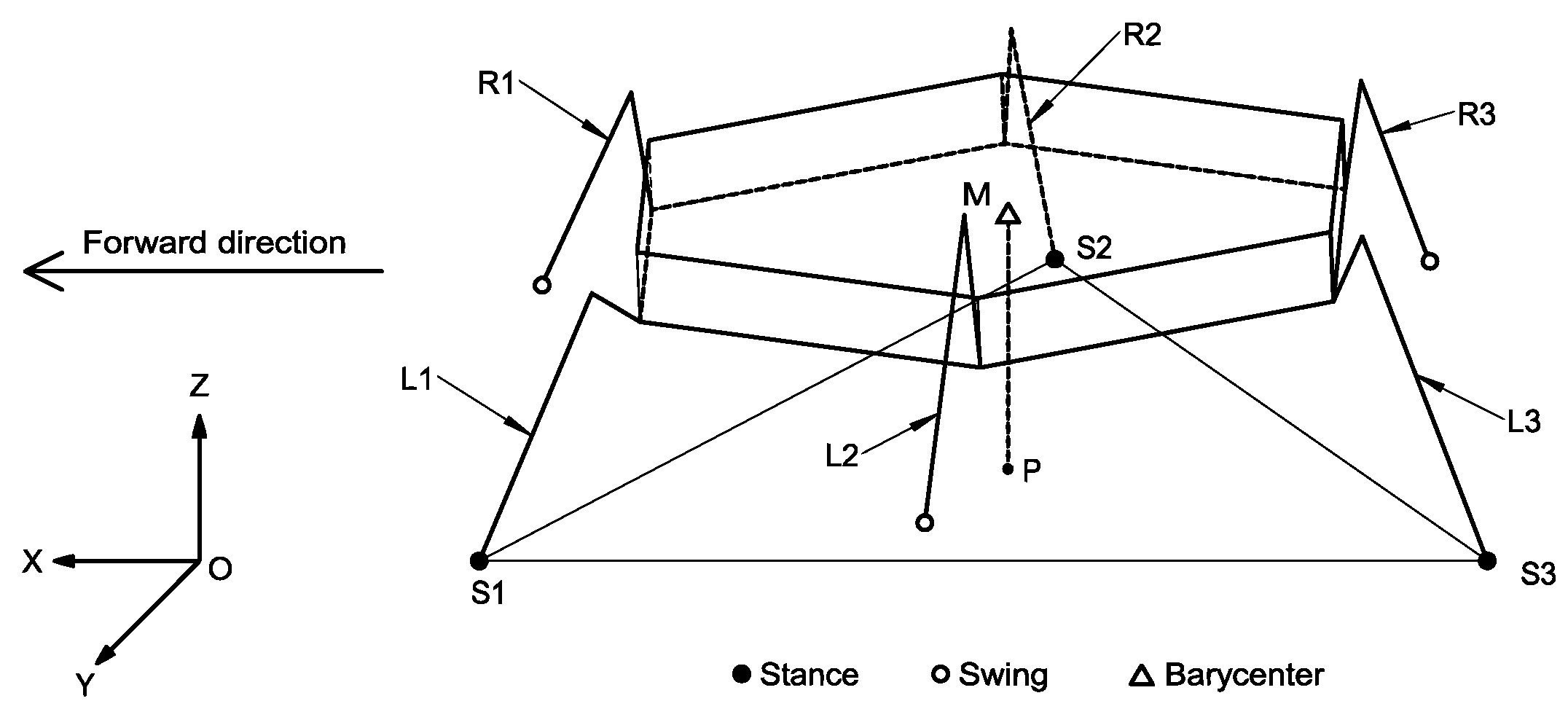
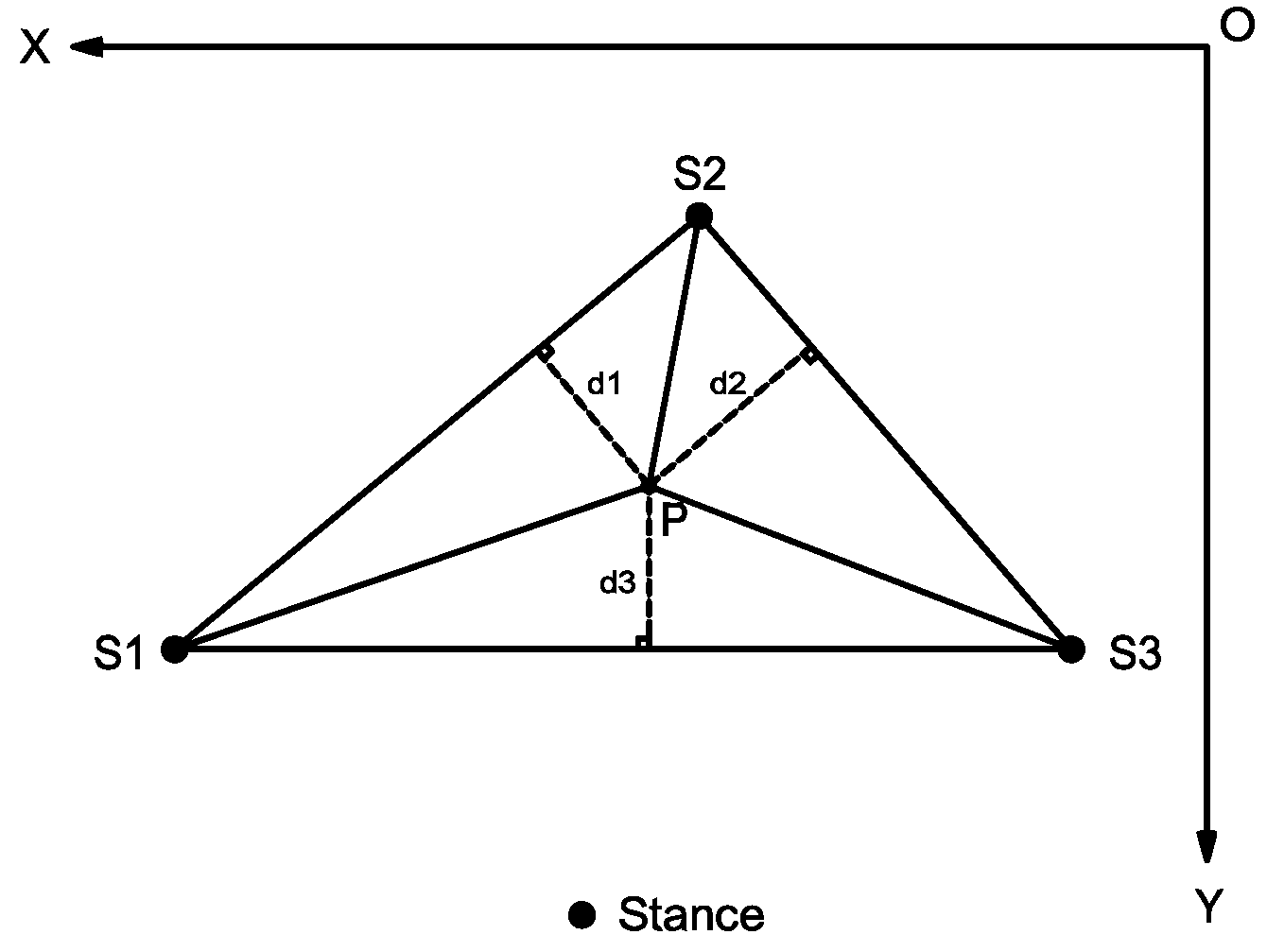
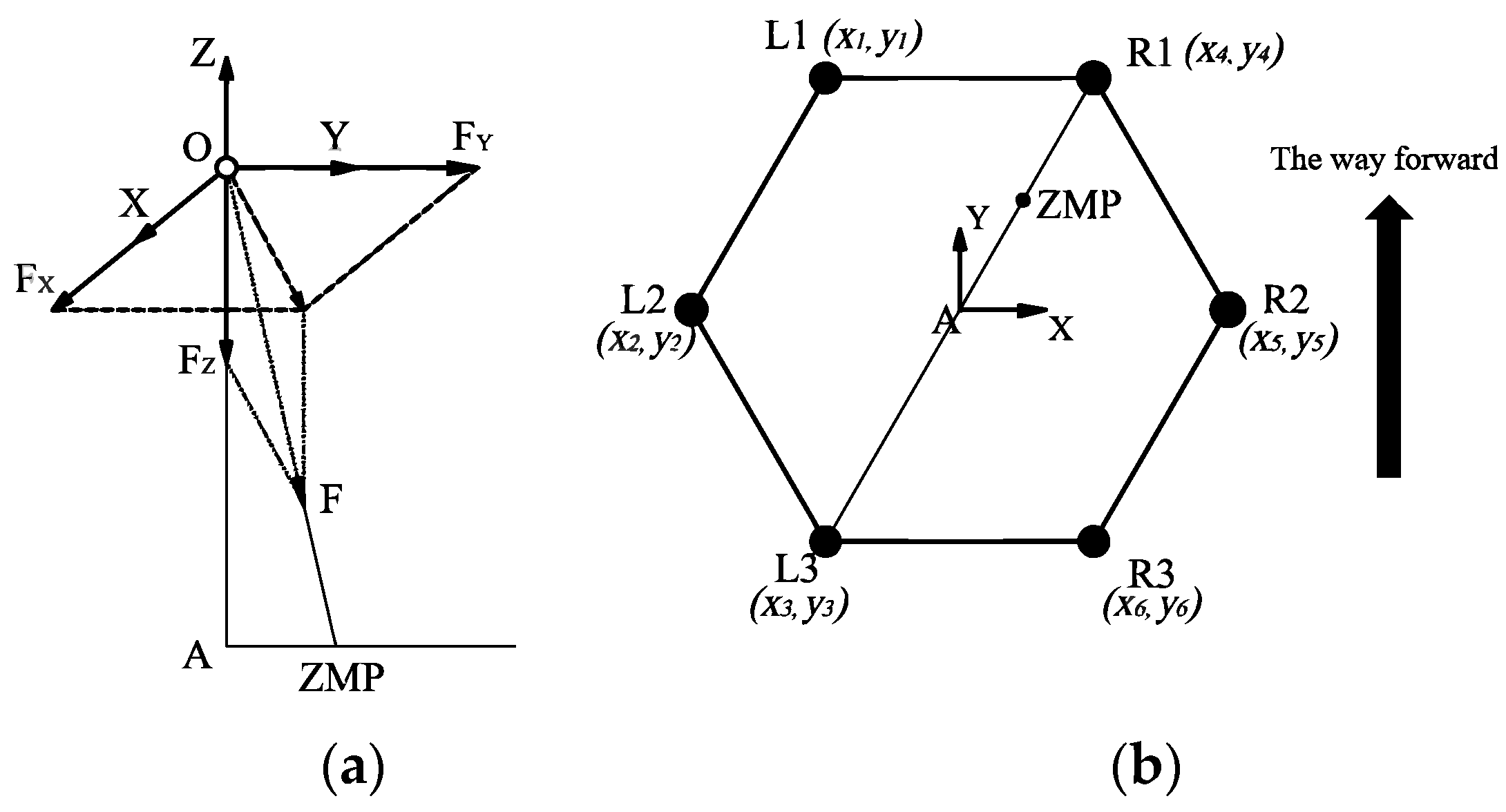
3.5. Analysis of Gait Stability of Hexapod Robot
4. Simulation and Experimental Analysis
4.1. One-Leg Simulation Analysis
4.2. Physical Prototype Experiments
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Shi, Q.; Gao, J.; Wang, S.; Quan, X.; Jia, G.; Huang, Q.; Fukuda, T. Development of a Small-Sized Quadruped Robotic Rat Capable of Multimodal Motions. IEEE Trans. Robot. 2022, 1–17. [Google Scholar] [CrossRef]
- Wang, L.; Meng, F.; Kang, R.; Sato, R.; Chen, X.; Yu, Z.; Ming, A.; Huang, Q. Design and Implementation of Symmetric Legged Robot for Highly Dynamic Jumping and Impact Mitigation. Sensors 2021, 21, 6885. [Google Scholar] [CrossRef]
- Niquille, S.C. Regarding the pain of spotmini: Or what a robot’s struggle to learn reveals about the built environment. Archit. Des. 2019, 89, 84–91. [Google Scholar] [CrossRef]
- Xu, R.W.; Hsieh, K.C.; Chan, U.H.; Cheang, H.U.; Shi, W.K.; Hon, C.T. Analytical Review on Developing Progress of the Quadruped Robot Industry and Gaits Research. In Proceedings of the 2022 8th International Conference on Automation, Robotics and Applications (ICARA), Prague, Czech Republic, 18–20 February 2022. [Google Scholar] [CrossRef]
- Kuehn, D.; Schilling, M.; Stark, T.; Zenzes, M.; Kirchner, F. System Design and Testing of the Hominid Robot Charlie. J. Field Robot. 2016, 34, 666–703. [Google Scholar] [CrossRef]
- Katz, B.; Di Carlo, J.; Kim, S. Mini Cheetah: A Platform for Pushing the Limits of Dynamic Quadruped Control. In Proceedings of the International Conference on Robotics and Automation, Montreal, QC, Canada, 20–24 May 2019. [Google Scholar] [CrossRef]
- Jeon, S.H.; Kim, S.; Kim, D. Real-time Optimal Landing Control of the MIT Mini Cheetah. arXiv 2021, arXiv:2110.02799. [Google Scholar] [CrossRef]
- Arena, P.; Di Pietro, F.; Noce, A.L.; Taffara, S.; Patane, L. Assessment of navigation capabilities of Mini Cheetah robot for monitoring of landslide terrains. In Proceedings of the 2021 IEEE 6th International Forum on Research and Technology for Society and Industry (RTSI), Naples, Italy, 6–9 September 2021; pp. 540–545. [Google Scholar] [CrossRef]
- Kau, N.; Schultz, A.; Ferrante, N.; Slade, P. Stanford doggo: An open-source, quasi-direct-drive quadruped. In Proceedings of the 2019 International conference on robotics and automation (ICRA), Montreal, QC, Canada, 20–24 May 2019. [Google Scholar]
- Zhao, Y.; Chai, X.; Gao, F.; Qi, C. Obstacle avoidance and motion planning scheme for a hexapod robot Octopus-III. Robot. Auton. Syst. 2018, 103, 199–212. [Google Scholar] [CrossRef]
- Elfes, A.; Steindl, R.; Talbot, F.; Kendoul, F.; Sikka, P.; Lowe, T.; Kottege, N.; Bjelonic, M.; Dungavell, R.; Bandyopadhyay, T.; et al. The Multilegged Autonomous eXplorer (MAX). In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 1050–1057. [Google Scholar]
- Saranli, U.; Buehler, M.; Koditschek, D.E. RHex: A Simple and Highly Mobile Hexapod Robot. Int. J. Robot. Res. 2001, 20, 616–631. [Google Scholar] [CrossRef] [Green Version]
- Travers, M.; Ansari, A.; Choset, H. A dynamical systems approach to obstacle navigation for a series-elastic hexapod robot. In Proceedings of the 2016 IEEE 55th Conference on Decision and Control (CDC), Las Vegas, NV, USA, 12–14 December 2016; pp. 5152–5157. [Google Scholar] [CrossRef]
- Mishra, A. Design, Simulation, Fabrication and Planning of Bio-Inspired Quadruped Robot. Master’s Thesis, Cornell University, Ithaca, NY, USA, 2014. [Google Scholar] [CrossRef]
- Wang, C.; Zhu, X.; Liu, B.; Hu, X. The Design and Simulation Analysis of Humanoid Robot Lower Limbs Driven by Rope. Mach. Des. Manuf. 2020, 2020, 261–264. [Google Scholar] [CrossRef]
- Spröwitz, A.T.; Ajallooeian, M.; Tuleu, A.; Ijspeert, A.J.; Sprowitz, A.T. Kinematic primitives for walking and trotting gaits of a quadruped robot with compliant legs. Front. Comput. Neurosci. 2014, 8, 27. [Google Scholar] [CrossRef]
- Hutter, M.; Gehring, C.; Bloesch, M.; Hoepflinger, M.A.; Remy, C.D.; Siegwart, R. StarlETH: A compliant quadrupedal robot for fast, efficient, and versatile locomotion. Adapt. Mob. Robot. 2012, 2012, 483–490. [Google Scholar] [CrossRef]
- Wang, L.; Meng, L.; Kang, R.; Liu, B.; Gu, S.; Zhang, Z.; Meng, F.; Ming, A. Design and Dynamic Locomotion Control of Quadruped Robot with Perception-Less Terrain Adaptation. Cyborg Bionic Syst. 2022, 2022, 9816495. [Google Scholar] [CrossRef]
- Barrio, R.; Lozano, Á.; Martínez, M.A.; Rodríguez, M.; Serrano, S. Routes to tripod gait movement in hexapods. Neurocomputing 2021, 461, 679–695. [Google Scholar] [CrossRef]
- Chun, C.; Biswas, T.; Bhandawat, V. Drosophila uses a tripod gait across all walking speeds, and the geometry of the tripod is important for speed control. Elife 2021, 10, e65878. [Google Scholar] [CrossRef]
- Liu, Y.; Fan, X.; Ding, L.; Wang, J.; Liu, T.; Gao, H. Fault-tolerant tripod gait planning and verification of a hexapod robot. Appl. Sci. 2020, 10, 2959. [Google Scholar] [CrossRef]
- Grzelczyk, D.; Stanczyk, B.; Awrejcewicz, J. Kinematics, dynamics and power consumption analysis of the hexapod robot during walking with tripod gait. Int. J. Struct. Stab. Dyn. 2017, 17, 1740010. [Google Scholar] [CrossRef]
- Mohammed, B. Planning tripod gait of an hexapod robot. In Proceedings of the 2017 14th International Multi-Conference on Systems, Signals & Devices (SSD), Marrakech, Morocco, 28–31 March 2017; pp. 163–168. [Google Scholar]
- Cai, Z.; Gao, Y.; Wei, W.; Gao, T.; Xie, Z. Model design and gait planning of hexapod climbing robot. J. Phys.: Conf. Ser. 2021, 1754, 012157. [Google Scholar]
- Deng, C.; Wang, S.; Chen, Z.; Wang, J.; Ma, L.; Li, J. CPG-Inspired Gait Generation and Transition Control for Six Wheel-legged Robot. In Proceedings of the 2021 China Automation Congress (CAC), Beijing, China, 22–24 October 2021; pp. 2310–2315. [Google Scholar]
- Čížek, P.; Faigl, J. On locomotion control using position feedback only in traversing rough terrains with hexapod crawling robot. IOP Conf. Ser. Mater. Sci. Eng. 2018, 428, 012065. [Google Scholar] [CrossRef]
- Yoo, S.Y. A Study of Walking Stability of Seabed Walking Robot in Forward Incident Currents[M]//RITA 2018; Springer: Singapore, 2020; pp. 249–255. [Google Scholar]
- Zheng, Y.; Xu, K.; Tian, Y.; Ding, X. Different manipulation mode analysis of a radial symmetrical hexapod robot with leg—Arm integration. Front. Mech. Eng. 2022, 17, 1–20. [Google Scholar] [CrossRef]
- Camacho-Arreguin, J.I.; Wang, M.; Russo, M.; Dong, X.; Axinte, D. Novel Reconfigurable Walking Machine Tool Enables Symmetric and Nonsymmetric Walking Configurations. IEEE/ASME Trans. Mechatron. 2022. [Google Scholar] [CrossRef]
- Habu, Y.; Yamada, Y.; Fukui, S.; Fukuoka, Y. A Simple Rule for Quadrupedal Gait Transition Proposed by a Simulated Muscle-driven Quadruped Model with Two-level CPGs. In Proceedings of the 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO), Kuala Lumpur, Malaysia, 12–15 December 2018; pp. 2075–2081. [Google Scholar] [CrossRef]
- Dujany, M.; Hauser, S.; Mutlu, M.; van der Sar, M.; Arreguit, J.; Kano, T.; Ishiguro, A.; Ijspeer, A. Emergent adaptive gait generation through Hebbian sensor-motor maps by morphological probing. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 7866–7873. [Google Scholar]
- Yin, P.; Wang, P.; Li, M.; Sun, L. A novel control strategy for quadruped robot walking over irregular terrain. In Proceedings of the 2011 IEEE 5th International Conference on Robotics, Automation and Mechatronics (RAM), Qingdao, China, 17–19 September 2011; pp. 184–189. [Google Scholar] [CrossRef]
- Li, M.; Zhang, X.; Zhang, J.; Zhang, M. Given trajectory oriented multi-legged coordinated control of hexapod robot. J. Huazhong Univ. Sci. Technol. (Nat. Sci. Ed.) 2015, 43, 32–37. [Google Scholar] [CrossRef]
- Wang, L. Strategy of Foot Trajectory Generation for Hydraulic Quadruped Robots Gait Planning. Chin. J. Mech. Eng. 2013, 49, 39–44. [Google Scholar] [CrossRef]
- Xi, L. Gait Planning and Walking Stability Research of Quadruped Bionic Robot. Master’s Thesis, Graduate School of National University of Defense Technology, Changsha, China, 2013. [Google Scholar]
- Dai, Z.; Liu, W.; Xu, J.; Li, L. Research on Robot Foot Trajectory Planning Based on High-order Polynomials. Comput. Meas. Control 2021, 29, 159–164. [Google Scholar]
- Ramdya, P.; Thandiackal, R.; Cherney, R.; Asselborn, T.; Benton, R.; Ijspeert, A.J.; Floreano, D. Climbing favours the tripod gait over alternative faster insect gaits. Nat. Commun. 2017, 8, 14494. [Google Scholar] [CrossRef] [PubMed]
- Erbatur, K.; Okazaki, A.; Obiya, K.; Takahashi, T.; Kawamura, A. A study on the zero moment point measurement for biped walking robots. In Proceedings of the 7th International Workshop on Advanced Motion Control. Proceedings (Cat. No.02TH8623), Maribor, Slovenia, 3–5 July 2002. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component Name | Material | Young’s Modulus (GPa) | Poisson’s Ratio |
|---|---|---|---|
| Drive shaft | C45E4 | 210 | 0.31 |
| The crank | AlMg1SiCu | 68.9 | 0.33 |
| U-shaped bar | AlZnMgCu1.5 | 71 | 0.33 |
| Other artifacts | Photosensitive Resin | 15 | 0.23 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, J.; Qiu, G.; Guo, W.; Li, P.; Ma, G. Design, Analysis and Experiments of Hexapod Robot with Six-Link Legs for High Dynamic Locomotion. Micromachines 2022, 13, 1404. https://doi.org/10.3390/mi13091404
Ma J, Qiu G, Guo W, Li P, Ma G. Design, Analysis and Experiments of Hexapod Robot with Six-Link Legs for High Dynamic Locomotion. Micromachines. 2022; 13(9):1404. https://doi.org/10.3390/mi13091404
Chicago/Turabian StyleMa, Jiawang, Guanlin Qiu, Weichen Guo, Peitong Li, and Gan Ma. 2022. "Design, Analysis and Experiments of Hexapod Robot with Six-Link Legs for High Dynamic Locomotion" Micromachines 13, no. 9: 1404. https://doi.org/10.3390/mi13091404