1. Introduction
Bipedal robots have shown strong application prospects due to their humanoid characteristics and flexibility of locomotion. In the past two decades, several bipedal robots were successfully developed, which could achieve high anthropomorphic stable locomotion. For instance, ASIMO [
1], developed by Honda, could perform actions such as going up and down stairs, jumping, and kicking a ball; HRP-5P [
2], developed by AIST, could cooperate with hands and feet to manipulate a gypsum board; Atlas [
3], developed by Boston Dynamics, could perform a series of complex actions, such as parkour. Although robots have exhibited the capability of achieving complex locomotion, they face a huge challenge of high energy consumption [
4]. By introducing passive compliance, bipedal robots exhibit the potential of impact resistance and high energy efficiency. For example, through introducing a passive compliant ankle, the cost of the electrical transport of DURUS is much lower than that of ASIMO and Atlas [
5]; through introducing a passive compliant kinematics chain, the energy consumption of Cassie is closer to that of human [
4]. By introducing passive compliance, the shock tolerance capacity of bipedal robots is also enhanced, and agiler locomotion can be achieved [
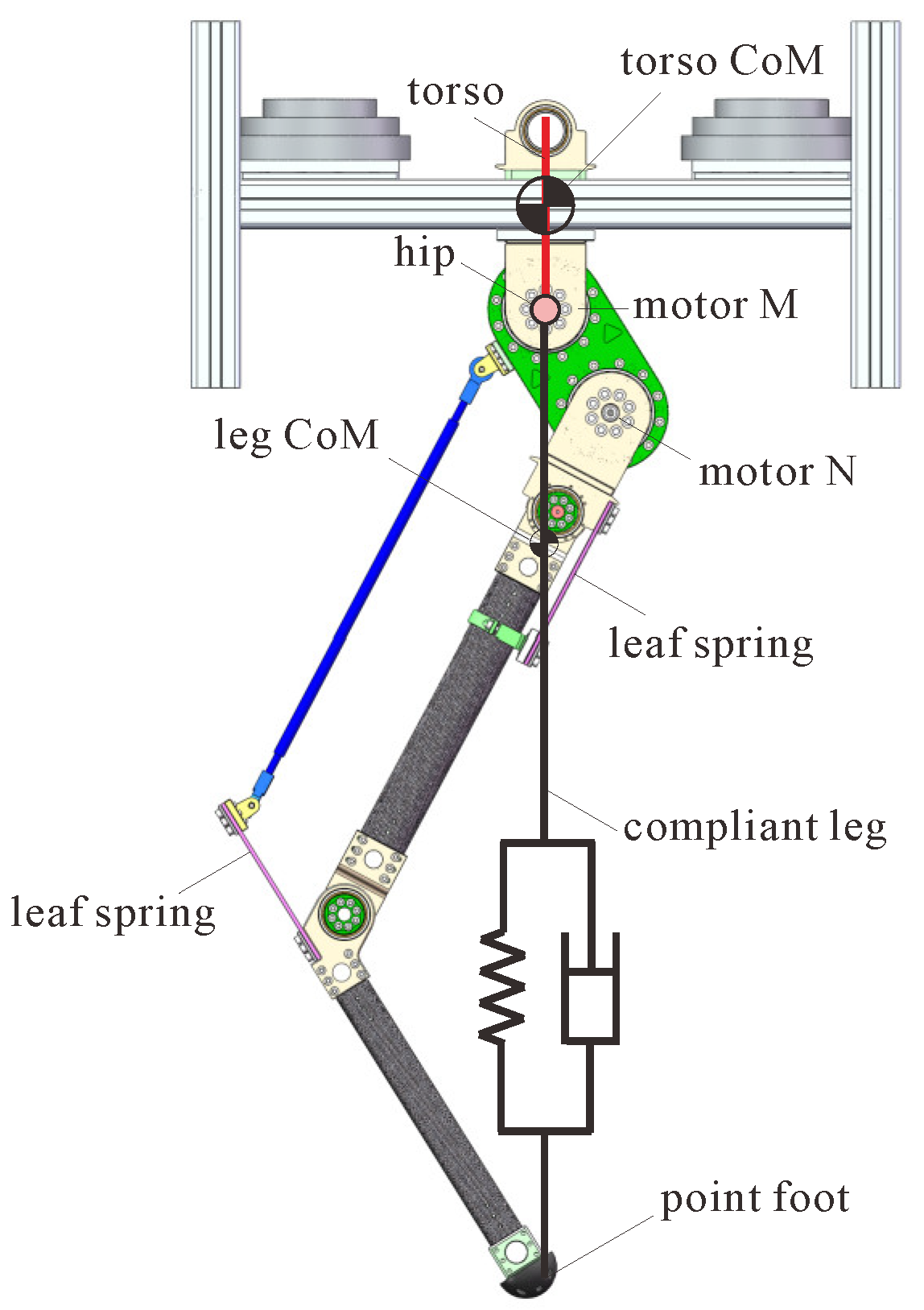
6]. However, the passive compliant parts increase the degrees of freedom of robot dynamics, adding to the difficulty of stable control of the robots. This work aims to explore an improved control strategy for stable and fast planar jumping of a compliant one-legged robot designed by ourselves, as shown in
Figure 1, thereby providing a reference for the control strategy of compliant bipedal robots.
Different modeling methods and control strategies could be found for the stabilization and fast locomotion of compliant legged robots, whether based on full-order models or simplified models. Regarding the full-order model, Westervelt et al. [
7] proposed virtual constraints and the hybrid zero dynamics (HZD) method to address the gait generation problem for underactuated legged robots. Based on these concepts, related research was further developed and successfully applied to real robots. Da et al. [
8] elevated the 2D underactuated bipedal walking gait to 3D by utilizing virtual constraints and the HZD method, and then, they combined it with the gait library method to achieve speed switching within a certain range on ATRIAS. Reher et al. [
9] implemented compliant walking on Cassie, for variable walking speed cases, by combining a Lyapunov function-based real-time controller, HZD method, and the gait library method. The main advantages of the full-order model-based control strategies are high control accuracy and mathematically provable stability; however, they need a certain amount of accurate information about the dynamic system and are computationally intensive [
10,
11]. Thus, it is of great significance to explore simplified modeling and related control strategies for stable and fast locomotion of compliant robots.
Inspired by human and animal jumping and running, Blickhan et al. [
12,
13] proposed the spring-loaded inverted pendulum (SLIP) model as a template model to describe the locomotion of legged animals and robots. It assumes that the total mass of the robot is concentrated at a single point in the hip joint and that there are one or two massless linear spring-like legs attached under the mass point. It allows for the approximation of the trajectory of the center of mass (CoM) and the ground reaction force (GRF), of biological locomotion with different leg configurations, and inspires stable control methods for legged robots. Raibert [
14] introduced the well-known three-part controller and successfully applied it to Raibet’s Hopper, and this controller greatly inspired the stable control strategies for the SLIP model. Rezazadeh et al. [
15] modeled ATRIAS as a two-leg SLIP model, used periodic time-based trajectories for the leg rest length regulation, used a discrete PID foot placement method for horizontal speed control, and implemented the robust walking and running of ATRIAS in unstructured environments. Xiong et al. introduced an actuated SLIP model for jumping and walking gait generation, which was successfully implemented on the legged robot Cassie [
16,
17]. Some other SLIP model-based robot control strategies can be seen in [
18,
19,
20,
21]. However, the SLIP model neglected information about the torso and legs, such as inertia and damping, which makes it difficult to stabilize the torso and obtain accurate locomotion.
Noticing this, Maus et al. [
22] introduced an extended SLIP model with a rigid torso and spring legs, and they proposed a posture control method based on the virtual pendulum concept for the stable control of the upright walking and running of legged robots. Then, from the perspective of bionics, a virtual pivot concept was further proposed to better understand and make use of the principle of locomotion in humans and animals [
23]. The extended SLIP model and the virtual pendulum concept were further developed, by other researchers, for robust control of legged robots hopping and walking [
24,
25]. However, the abovementioned control method could not adaptively track the desired forward speed and jumping height of the robot modeled by the extended SLIP model, and more details about the limitations of these controllers could be seen in
Section 4. To the best knowledge of the authors, few works except the abovementioned could be found implementing stable and fast compliant one-legged robot jumping by combining the extended SLIP model and the concept of the virtual pendulum, which is of great significance to make full use of the bio-inspired control method for extending the abilities of compliant legged robots.
The main contributions of this work are concluded as follows:
- (1)
This work implements the stable forward jumping of a one-legged robot with a non-negligible torso modeled by the extended SLIP, and the robot’s forward speed and jumping height can be adaptively tracked at the same time.
- (2)
An improved jumping control strategy, based on the three-part control scheme and the concept of the virtual pendulum, was proposed for achieving the stable and fast jumping mentioned above. To track the desired forward speed adaptively, we introduced the integral term and the variable time coefficient to improve the speed control method for speed regulation; to track the desired jumping height adaptively and accurately, we improved the energy regulation method for the jumping height control of the extended SLIP model by introducing a jumping height error-based energy updating method.
- (3)
Comparative simulations were conducted to demonstrate the control accuracy for jumping speed and jumping height tracking. Additional simulations, regarding different desired forward speeds up to 6.3 km/h, jumping with state perturbations, and jumping on uneven terrain, were carried out to further demonstrate the performance of the proposed controller.
The rest of this work is organized as follows.
Section 2 briefly describes the compliant one-legged robot designed by ourselves.
Section 3 depicts the dynamic modeling of the robot’s jumping, taking the torso inertia, leg inertia, and leg damping into account.
Section 4 introduces the design of the controller that enables the robot to jump stably. Afterward,
Section 5 displays the simulation results, including control accuracy and stability analysis, as well as the robot’s stable and fast jumping performance. Lastly,
Section 6 concludes this work and presents future work.
3. Modeling of the Designed Robot
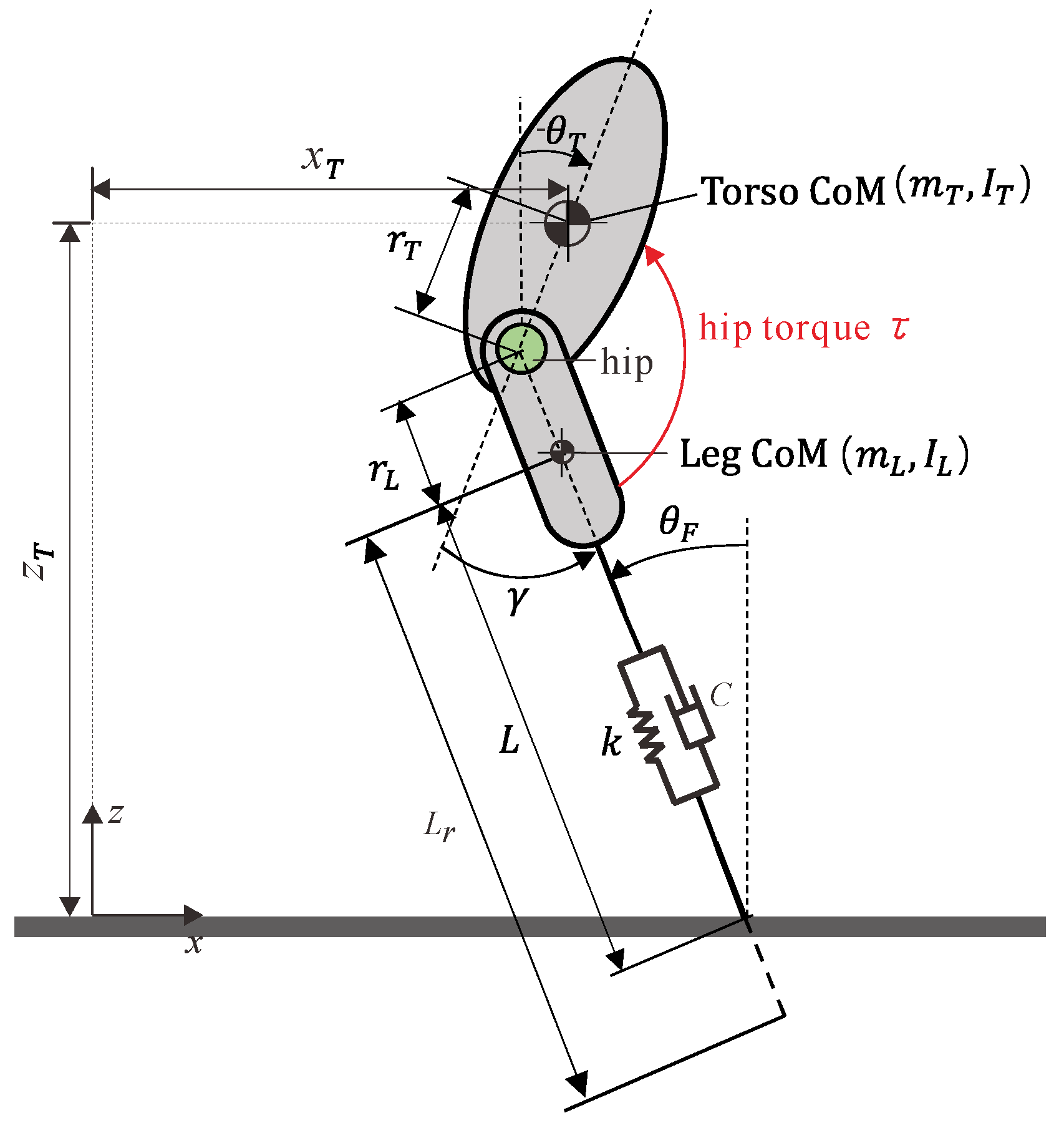
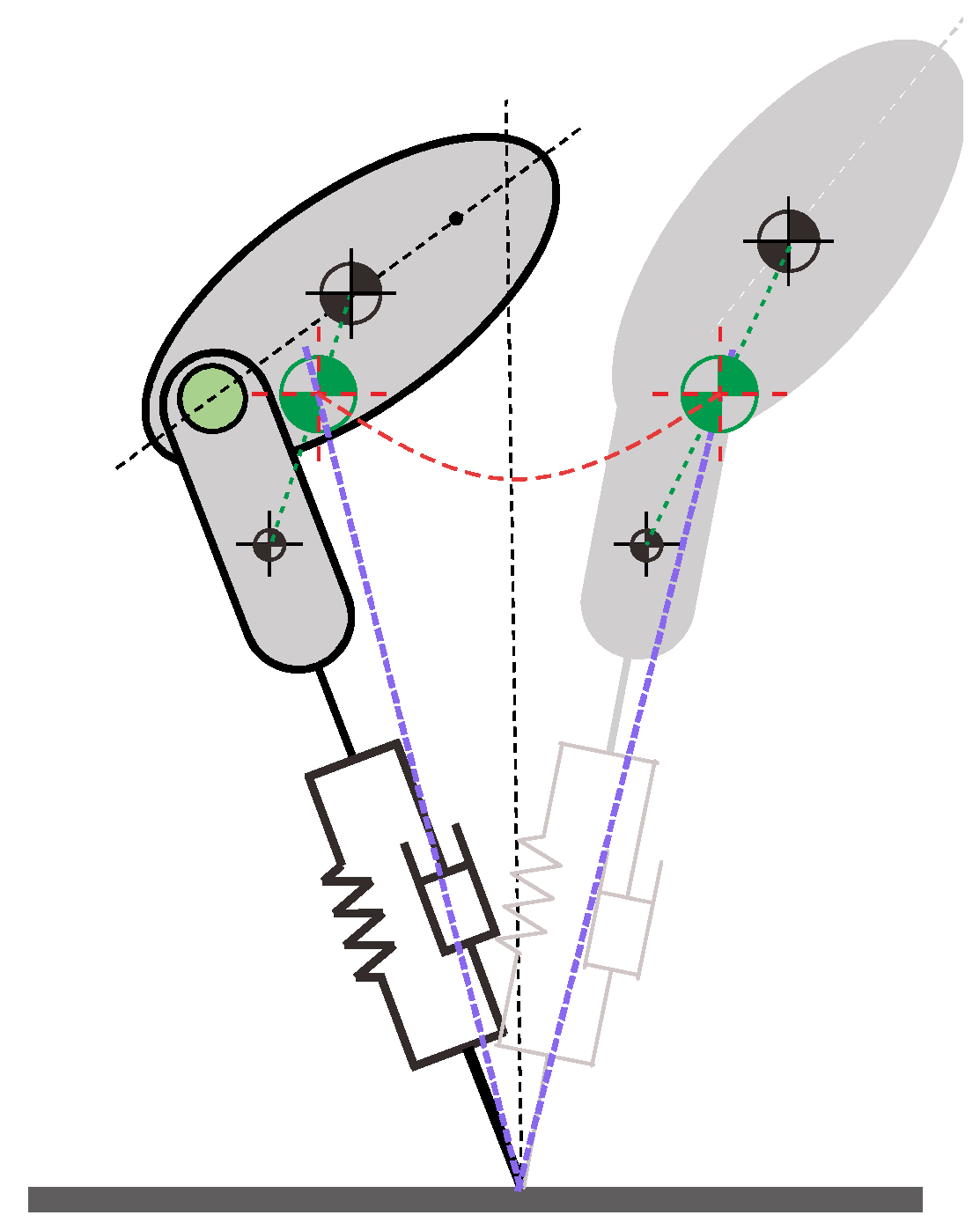
Figure 3 presents the extended SLIP model with a non-negligible torso and leg mass for the planar jumping of the compliant one-legged robot. As described above, the motor N, which is responsible for leg rest length adjustment, will inject or release energy for different jumping targets, such as a certain jumping height or a certain forward speed, while motor M will provide active hip torque τ for the swing angles between the leg and torso.
Regarding the definition of the world coordinate for the robot’s jumping, the x-direction, and the z-direction were defined as the forward and hopping directions, respectively. denote translational displacement in the x-direction and the z-direction and rotation angle concerning the y-direction of the torso, respectively; denotes the rotation angle of the leg from the axis along the torso to the leg, i.e., swing angle of the leg; denote the leg rest length and leg length due to the spring-like deformation; denotes the foot angle and was named as the angle of attack at the moment the foot touches the ground.
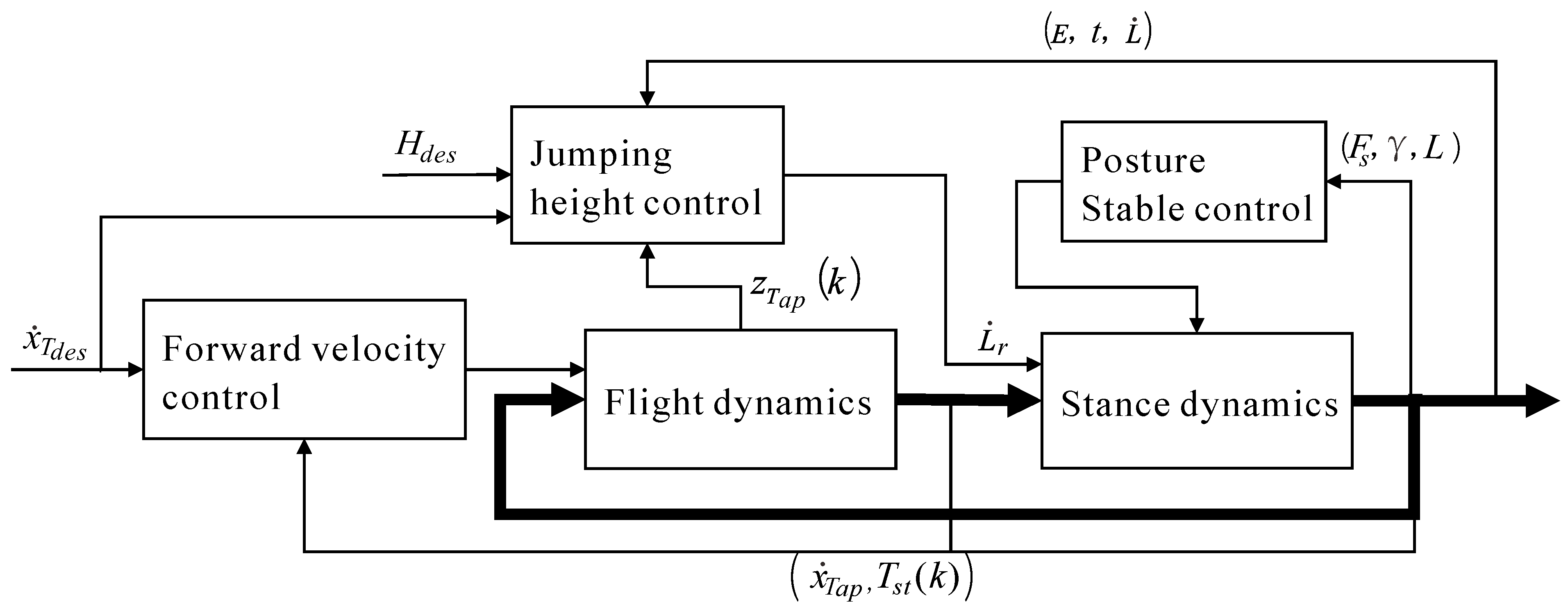
The jumping dynamics of the robot could be divided into three successive processes: the flight phase in the air, the stance phase on the ground, and the transition process between these two phases. The dynamics modeling of these processes will be described, in detail, in the following subsections. It is worth noting that the former two phases can be described by continuous dynamics equations.
3.1. Continuous Dynamics
3.1.1. Flight Phase
During the flight phase, the foot of the robot does not touch the ground. Therefore, the extended SLIP model for the flight phase features four degrees of freedom (DoFs), and here, we selected
as the generalized variables. The dynamics equations for the flight phase can be expressed as:
where
and
represents the configuration space of the flight phase dynamics,
represent the inertia matrix, Coriolis and centrifugal matrix, and gravity vector, respectively,
represents the coefficient matrix of generalized forces, and
represents the vector of generalized forces.
3.1.2. Stance Phase
During the stance phase, the foot of the robot is in contact with the ground, and under the assumption that it does not slip against the ground, the foot plays the role of a pivot joint. Due to the spring-like compliance property of the leg, the leg length
would change passively under the ground reaction force (GRF). Therefore, the extended SLIP model for the stance phase features three degrees of freedom (DoFs), and here, we selected
as the generalized variables. Thus, the dynamics equations for the stance phase can be expressed as:
where
and
represents the configuration space of the stance phase dynamics,
represent the inertia matrix, Coriolis and centrifugal matrix, and gravity vector in stance phase, respectively,
represents the coefficient matrix of generalized torques,
represents the vector of generalized torques, and
represents the passive spring and damping force.
According to the two equations above, the state space expressions of the continuous dynamics for the extended SLIP model can be described as:
where
represents one of the different continuous phases mentioned above,
represents the state vector, and
represents the related state space.
3.2. Transit Maps
As seen in Equations (1) and (2), different DoFs and generalized variables could be observed between the flight phase and the stance phase, and therefore, transit maps between the state variables regarding different phases are needed. The transit maps consist of two sub-maps, the touchdown map, and the lift-off map.
3.2.1. Touchdown Map
The touchdown map refers to the map in which the state variables in the flight phase are transformed into the state variables in the stance phase. The touchdown event occurs when the foot of the robot touches the ground, characterized by the displacements of the foot in the x-direction and z-direction reducing to zero. Two issues need to be addressed: the transient change of state variables due to the impact on the ground and the transformation of the different state variables regarding the two phases.
Regarding the impact with the ground, it is considered to occur at the moment of touchdown and to be a completely inelastic collision, which could be taken as an impulse that brought the velocity of the foot to zero instantaneously [
7]. Moreover, due to our compliant leg design and that we only consider the mass above the spring-like leg, the impulse force along the leg will be zero, acting only in the direction perpendicular to the leg. To address the dynamic feature at the impact moment, adding the impact force
into Equation (1), the equations for the constrained dynamics, in this process, can be expressed as:
where
represents the constraint matrix, and
represents the impulse force vector during impact. Integrating both sides of Equation (4), the touchdown map can be expressed as:
where
represents the intensity of the impulse force, and
represent the generalized velocities of the robot before and after the impact. The orientation of the leg is in parallel with the straight line passing through the hip joint and the contact point during impact, making the leg confined to a holonomic constraint expressed as follows:
where
and
represent the coordinate of the hip joint and the contact point of the robot in the world coordinate.
The relative velocity constraint equation can be expressed as:
Combining Equations (5) and (7), the impulse intensity and the generalized velocities after impact can be derived as:
Regarding the transformation of the different state variables between the flight phase and the stance phase, the following expression can be used:
where
denotes the initial states of the stance phase;
, represents the flight states after impact;
represents the reset map from flight to stance.
3.2.2. Lift-Off Map
The lift-off map refers to the map in which the state variables in the stance phase are transformed into those in the flight phase. The lift-off event occurs when the leg force
tends to be less than 0 N. No impact would occur since the ground cannot impose pull force on the robot, and thus, we only need to address the reset map of state variables from the stance phase to the flight phase:
where
denotes the initial state variables in the flight phase;
, denotes ending states of the stance phase;
denotes the reset map from flight to stance.
5. Simulations and Results
This section aimed at validating the effectiveness of the proposed control strategy through numerical simulations. The jumping simulations of the compliant one-legged robot were conducted using MATLAB 2019b, and the dynamics functions were solved by the ODE45 solver. According to the real robot data, the restriction of hip torque and leg rest length was set as
,
, respectively. The model parameters of the extended SLIP model could be seen in
Table 1. From Equations (12)–(18), control parameters need to be selected carefully to implement stable jumping, namely the stable posture control parameter
in stance phase, the angle of attack control parameters
and the hip servo control parameters
in flight phase, the jumping height control parameters
, and the leg retraction coefficient
. To simplify the parameter tuning process, we fixed some of them as
,
, and then, there remain only two parameters
that need to be tuned. The simulation results shown below demonstrated the effectiveness of these settings.
To find the stable limit cycle of the robot with different control target values, the initial states of the robot were set as
, which means the control target variables were initiated to the control target values, and other state variables were set to zero. Tuning the control parameters
well, the jumping of the legged robot would converge, to a certain limit cycle, from the initial states with a relatively fast convergence rate. An optimal method was utilized for auto-tuning the two control parameters described as follows:
where
represents the evaluation function value, and
represents the maximum preset jumping step. The evaluation function value is the weighted average of the tracking error at apexes, and the weight of the tracking error increases with the jumping steps; the weights are selected to make the jumping converge fast. If the robot falls before
step, a relatively large number, such as 100, would be added into
F as punishment to make sure the robot converges to a stable jumping value. This optimal method was solved by the FMINCON function of MATLAB 2019b.
5.1. Control Precision and Stability
In this subsection, the desired jumping height and forward speed (i.e., control target values) were set as and the initial states were set as , which means the one-legged robot was raised to 0.1 m above the ground and then allowed to fall freely with an initial forward speed of . The control parameters were optimized to obtain the minimum evaluation function value of Equation (21).
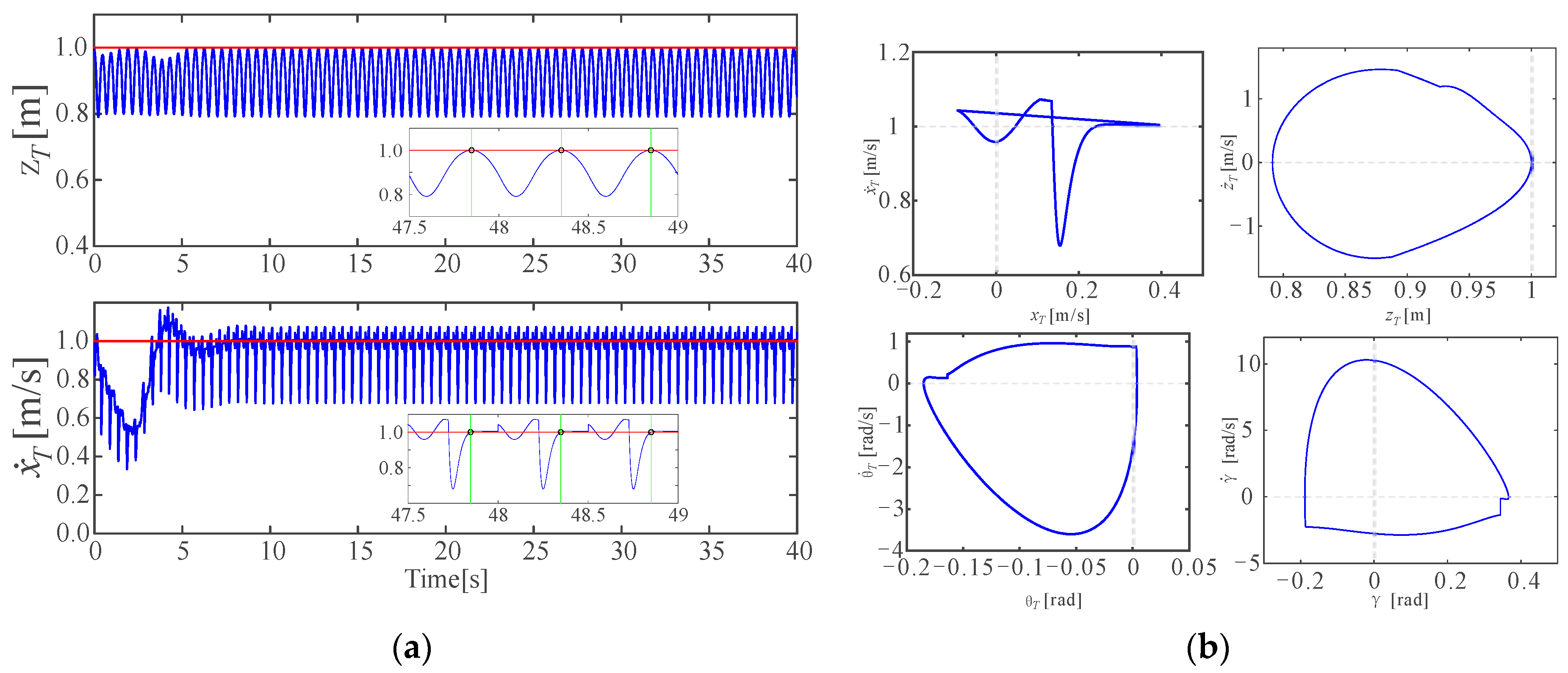
Figure 8 presents the stable and accurate tracking results of the jumping height and the forward speed. In
Figure 8a, the blue curves represent the real-time trajectories of the torso, the red horizontal lines represent the desired jumping height and desired forward speed, respectively, and the green vertical lines in the two enlarged subplots represent the moment, while the torso is arriving at the apexes, in which
. It could be seen that the jumping height and the desired forward speed were tracked accurately at the apex after about 8 s, validating the accurateness of the proposed control strategy.
Figure 8b shows the phase graph of four of the state variables, and it could be seen that a stable limit cycle was formed with the proposed control strategy.
The stability of the limit cycle above was discussed using the linearized Poincare map. The fixed point of the limit cycle on the Poincare surface was found as , and the eigenvalue vector of the Jacobian matrix of the Poincare map was found as , where , meaning that the limit cycle is exponentially stable; thus, the jumping of the robot is also stable.
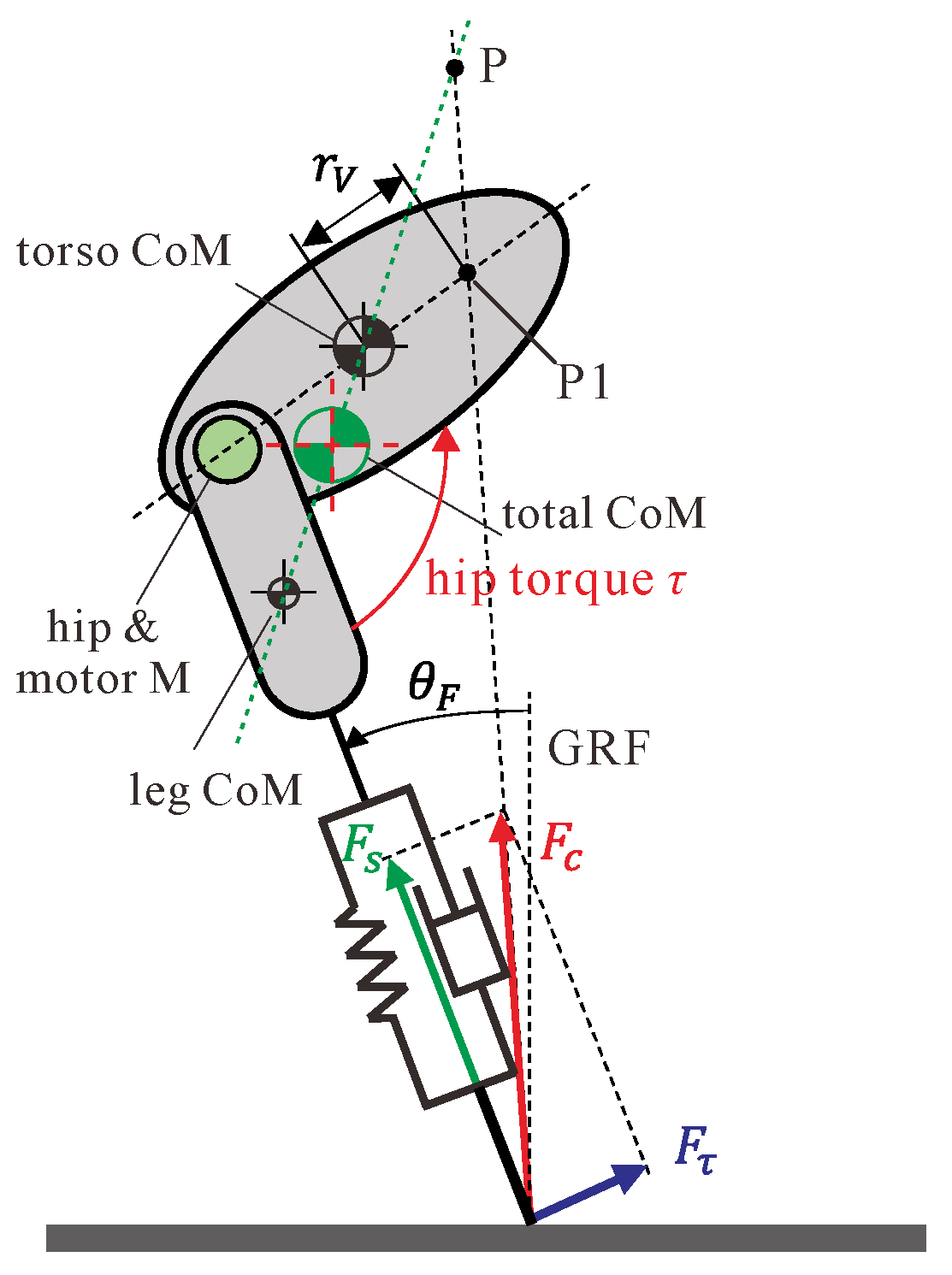
In order to show the advantages of the proposed control strategy for the extended SLIP model, two other comparative simulations with different control strategies were conducted. To make the posture stabilized, two comparative simulations were conducted using the VPP control method mentioned in
Section 4.1.1. The differences between these control strategies are the control method of the forward speed and the jumping height, which were described, in detail, as follows.
Comparative simulation 1 (C1): For the control of the forward speed, Raibert’s method, based on symmetric analysis, without the integral term was adopted, and the initial estimated stance period
was not updated during the total simulation process; for the control of jumping height, the energy-based leg rest length regulation with constant estimated energy expressed in Equation (16) was adopted. This control strategy could be seen as a simple combination of the related method in [
14,
30]. The control parameters were tuned well to achieve stable jumping, which could be seen in
Table 2. The initial conditions and remaining parameters were the same as the proposed strategy.
Comparative simulation 2 (C2): The proposed forward speed control method with the integral term was adopted for the forward speed control, and the energy-based leg rest length regulation, with constant estimated energy expressed in Equation (16), was adopted for the jumping height control. This control strategy was set to compare the effectiveness of the energy updating method for the accurate control of jumping height. The control parameters were tuned well to achieve stable jumping, which could be seen in
Table 2. The remaining parameters were the same as the proposed strategy.
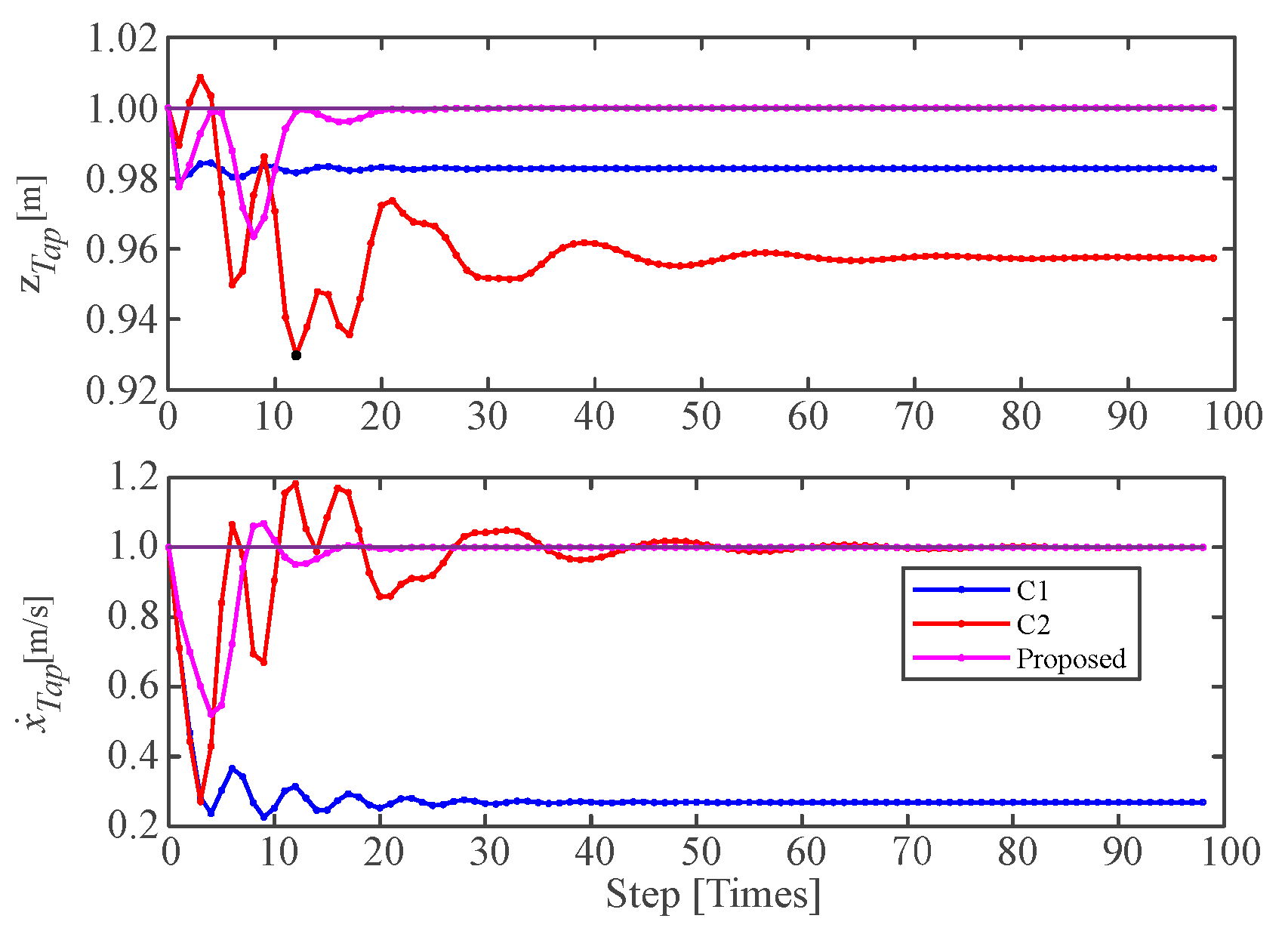
Figure 9 depicted the variations of the control target variables, i.e., jumping height and forward speed at the apex, with different control strategies. The three control strategies could lead to a stable jumping for the extended SLIP model; however, the control accuracy was different from each other. The result of C1 indicates that neither the desired jumping height, nor the desired forward speed, could be tracked accurately, which means that the simple combination of the existing methods in [
14,
30] could not achieve the desired jumping for the extended SLIP model. Comparing C2 to C1, the desired forward speed could be tracked accurately by introducing the integral term of the jumping speed, though the jumping height could not be tracked accurately, which is due to the inaccurately estimated system energy in a stable limit cycle. Comparing the proposed method to C2, by introducing the system energy updating method, both the desired forward speed and the desired jumping height could be tracked accurately, demonstrating the effectiveness of the proposed control strategy for accurate jumping height and forward speed tracking for the extended SLIP model.
5.2. Fast and Robust Jumping
Generally, we care about the jumping speed of the robot more than the jumping height. To further test the ability of the one-legged robot with the proposed control strategy toward fast jumping, different forward speed tracking simulations were conducted. In the following simulations, the forward speed was selected as the main control target, and the desired jumping height was fixed as = 1 m.
Table 3 shows the optimal jumping results with different desired forward speeds. The optimal time coefficient
needs not to be 0.5, which is considered to be due to the asymmetric properties of the extended SLIP model, and it played a role in the optimization of the jumping performance. With the proposed controller, and without the restriction of the ground fraction cone, the robot could be seen implementing different forward speeds, from zero to a fast speed of 1.75 m/s (6.3 km/h), which demonstrated the good performance of the proposed controller for fast stable jumping of the extended SLIP model. On the other hand, it could be seen that the control parameters, evaluation function values
F, and the eigenvalues
of the Jacobian matrixes do not exhibit strong regularity with respect to desired forward speeds, which was considered to be due to the similar but different initial conditions.
The robustness of stable limit cycles with different forward speeds was explored as well. In this work, the robustness was indicated by the admitted single-state perturbation ranges of the state variables in limit cycles, within which the jumping would still converge to the limit cycle. The initial conditions of the legged robot were set as the apex states of the limit cycles, with different desired forward speeds in previous simulations, but the control parameters remained the same as those in the related limit cycles. It is worth noting that the event-based variables and the integral term in Equations (13) and (17) should be initiated by those in related limit cycles as well because they also influence the locomotion of the robot. Then, the perturbation would be added to one of the state variables at the apex of the robot in a single simulation, and we found the maximum and minimum admitted perturbations in which the robot could recover to the stable jumping. To simplify the simulation process, the four typical state variables would be selected to be tested. The perturbations of would not influent the stability of the jumping, and the perturbations of could be transferred to those of because the target angle of attack is always constant during the flight down phase.
Figure 10 shows the admitted single-state perturbation ranges of the four different state variables, with respect to different desired forward speeds. The black dotted lines represent the zero perturbations of the related stable limit cycle with different desired forward speeds, and the red and blue curves represent the upper and the lower boundary of the admitted perturbations in which the robot could remain stable jumping. It could be seen that the robot could recover to a stable jumping state with relatively large single-state perturbations.
Figure 10a depicted the admitted single-state perturbation ranges of the jumping height
. It could be seen that the robot could withstand large positive perturbations of jumping height almost above two times the net jumping height, i.e., 0.1 m. However, the admitted negative perturbation ranges are relatively low and increase slightly as the desired forward speed.
Figure 10b depicted that the robot could withstand about 20-degree positive perturbations of the torso orientation at the apex. Specifically, it is remarkable that the admitted perturbation of the limit cycle with the 0 m/s desired forward speed is about ±90°, which is considered to inherit the advantages of the VPP controller for the vertical hopping presented in [
24].
Figure 10c,d depicted the admitted single-state perturbation ranges of the forward speed and the torso angular velocity, which are nearly 1 m/s and 50 deg/s, and both are relatively large. The analysis above validates the robustness of the stable jumping.
To further test the robustness, we tested the robot jumping on uneven terrain with a one-step disturbance of ground height, as shown in
Figure 11a. The initial conditions of the legged robot were set as apex states of the limit cycle with different desired forward speeds in previous simulations. In this part, we assumed that the foot would not collide with the edge of the uneven terrain, the jumping height of the torso was set as 1 m, which means the net jump height of the torso is 0.1 m.
Figure 11a shows the snapshot of jumping on uneven terrain with one-step ground height disturbance
.
Figure 11b shows the admitted disturbance ranges of the ground height with respect to different desired forward speeds within which the robot maintains stable jumping. The red curve denotes the maximum admitted positive disturbances of ground height, and the blue curve denotes the minimum admitted negative disturbances of ground height. The stable jumping could be maintained with a certain range of ground height disturbance, where the higher the forward speed, the larger the upper boundary of the admittance disturbance and the smaller the lower boundary of the admittance disturbance. The stable jumping could withstand the negative ground height disturbance above 100% of the net jumping height of the torso (0.1 m), which is larger than the positive one. The simulation result demonstrates the robustness of the robot jumping on uneven terrain.
6. Conclusions and Future Work
This work proposed an improved control strategy for the stable and fast planar jumping of a designed compliant one-legged robot. The robot was modeled as an extended spring-loaded inverted pendulum (SLIP) with non-negligible torso inertia, leg inertia, and leg damping. The posture stable control was achieved by introducing the approximate VPPC-FP method. An improved foot placement method with variable time coefficient and integral term of the forward speed tracking error was introduced to accurately track the forward speed. A modified energy-based leg rest length regulation law was adopted, in which the integral term of jumping tracking error was also introduced to accurately track the jumping height. A practical stability criterion was introduced for the judgment of the jumping stability.
Numerical simulations were conducted to validate the effectiveness of the proposed control strategy. Results show that stable and fast planar jumping of the compliant one-legged robot could be implemented based on the extended SLIP model and the proposed control strategy. The jumping height and forward speed of the torso at the apex could be tracked accurately. The robot could recover to stable jumping from certain disturbances of state variables or uneven terrains.
In the next step, experiments will be conducted on our compliant one-legged robot for validating the effectiveness of the proposed control strategy in practice. In the long term, we will build a biped robot with passive compliance and extend the control strategy to a stable and fast bipedal robot’s jumping and running.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}