
Upright and Crawling Locomotion and Its Transition for a Wheel-Legged Robot

 , ,
, ,
Abstract
:1. Introduction
- We develop a new wheel-legged robot with two locomotion modes and the ability to transition between them and build simplified models for different motion modes of the robot;
- We propose a crawling control strategy that can allow the robot to stably pass through low and narrow passages with different heights and different curve radii;
- We propose locomotion mode transition control methods that enable the robot to transition between the crawling mode and the upright balanced moving mode by respectively optimizing the gravity work of the body and solving a quadratic programming (QP) problem about the posture and motion trajectories of the robot.
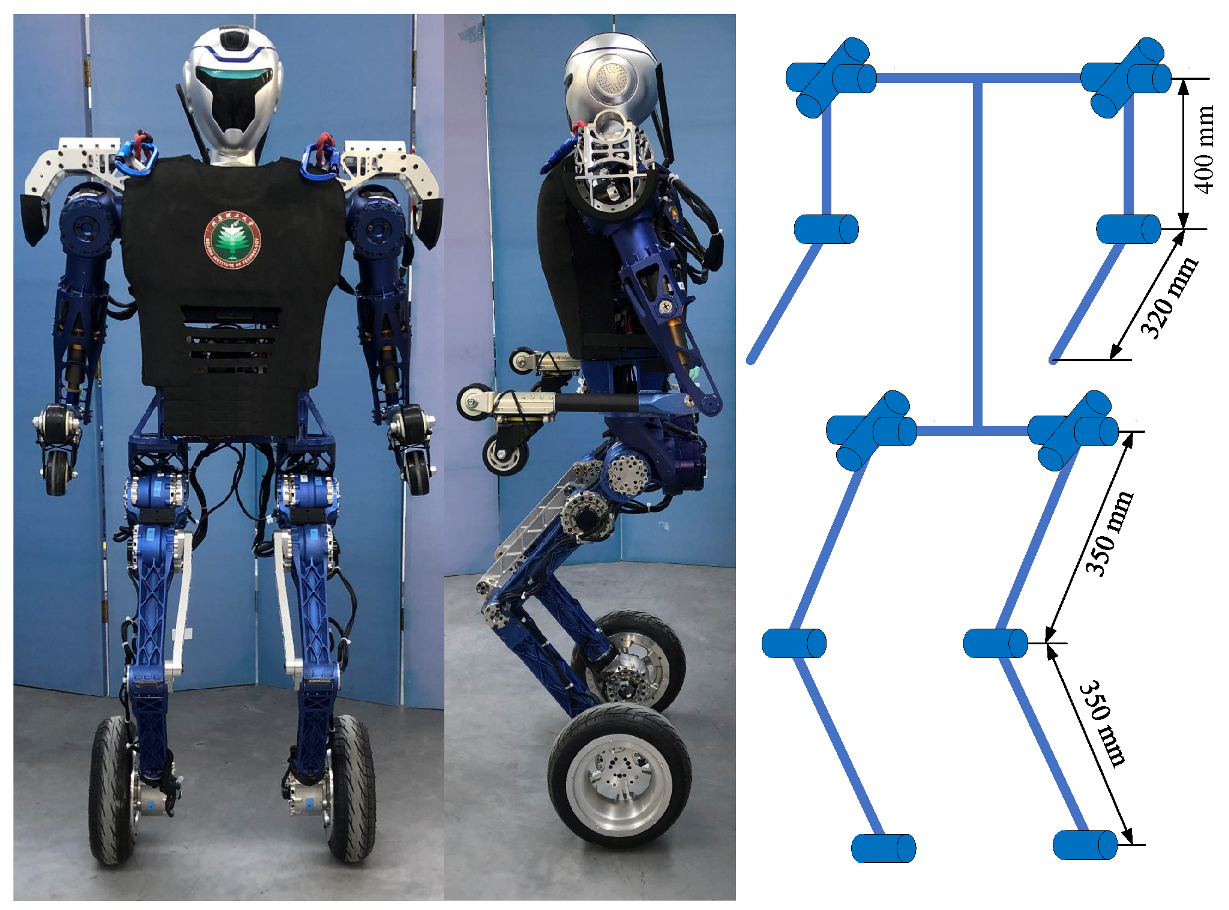
2. BHR-W Robot System
2.1. Mechanical Design
2.2. Hardware System
3. Modeling and Control of Two Locomotion Modes
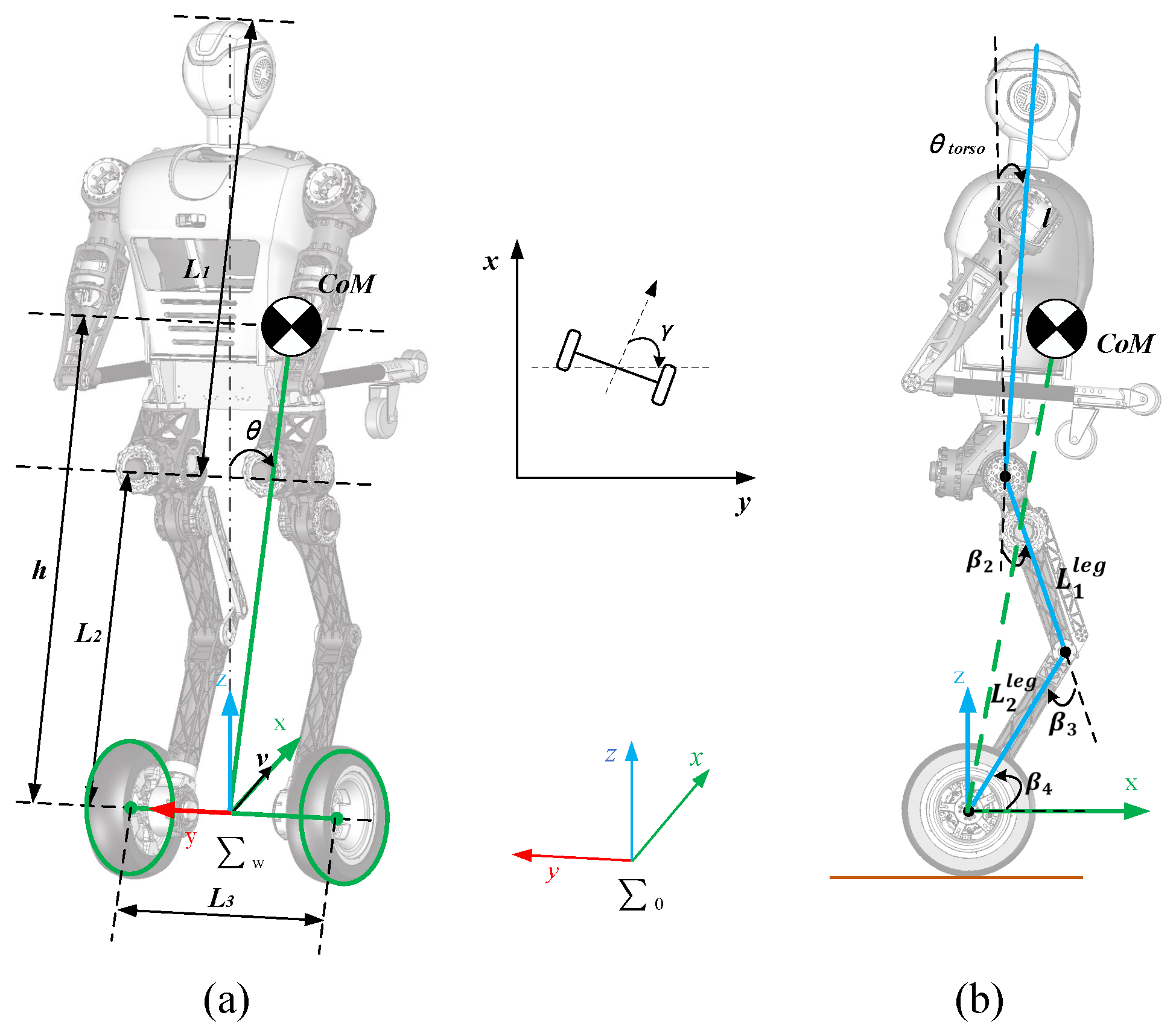
3.1. Coordinates
3.2. Modeling and Control of the Upright Balanced Moving Mode
3.2.1. Upright Balanced Moving Model
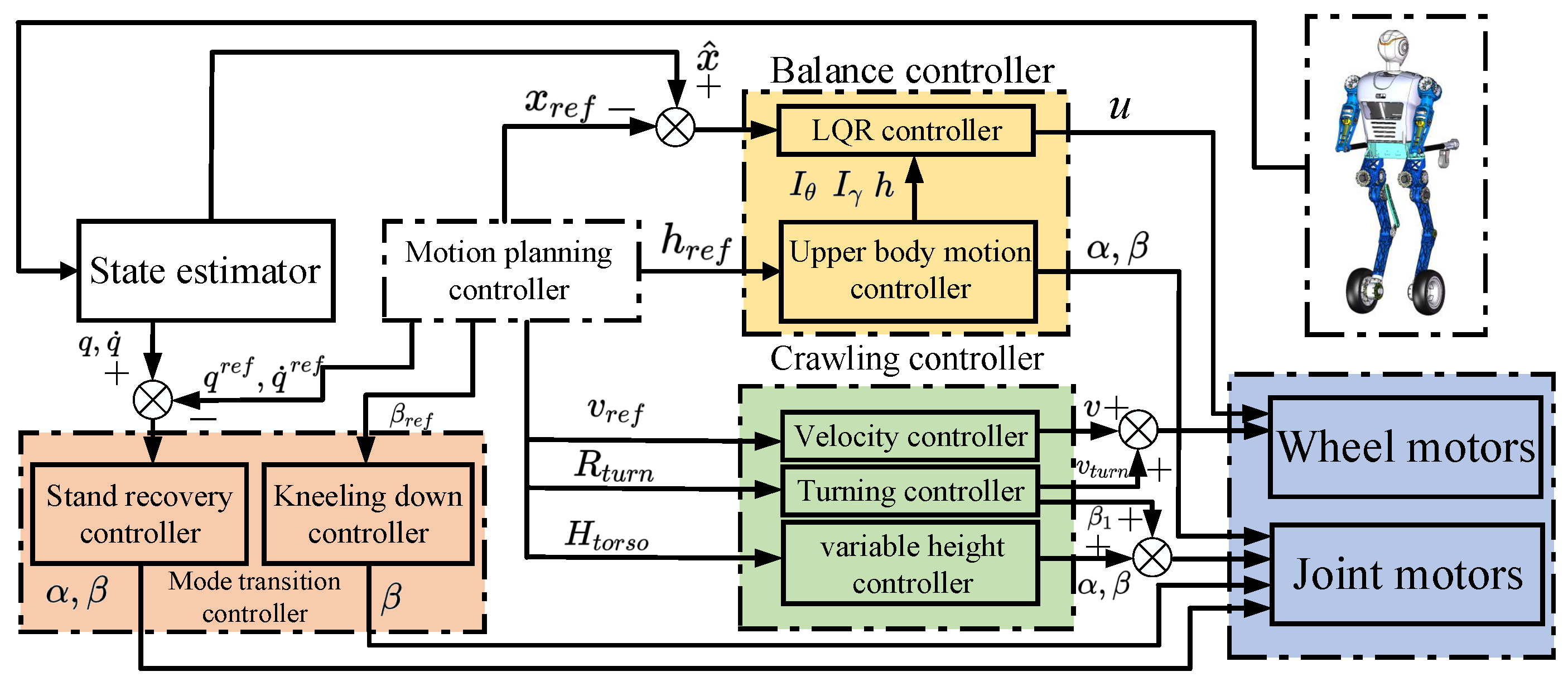
3.2.2. Upright Balanced Moving Control
3.3. Modeling and Control of the Crawling Mode
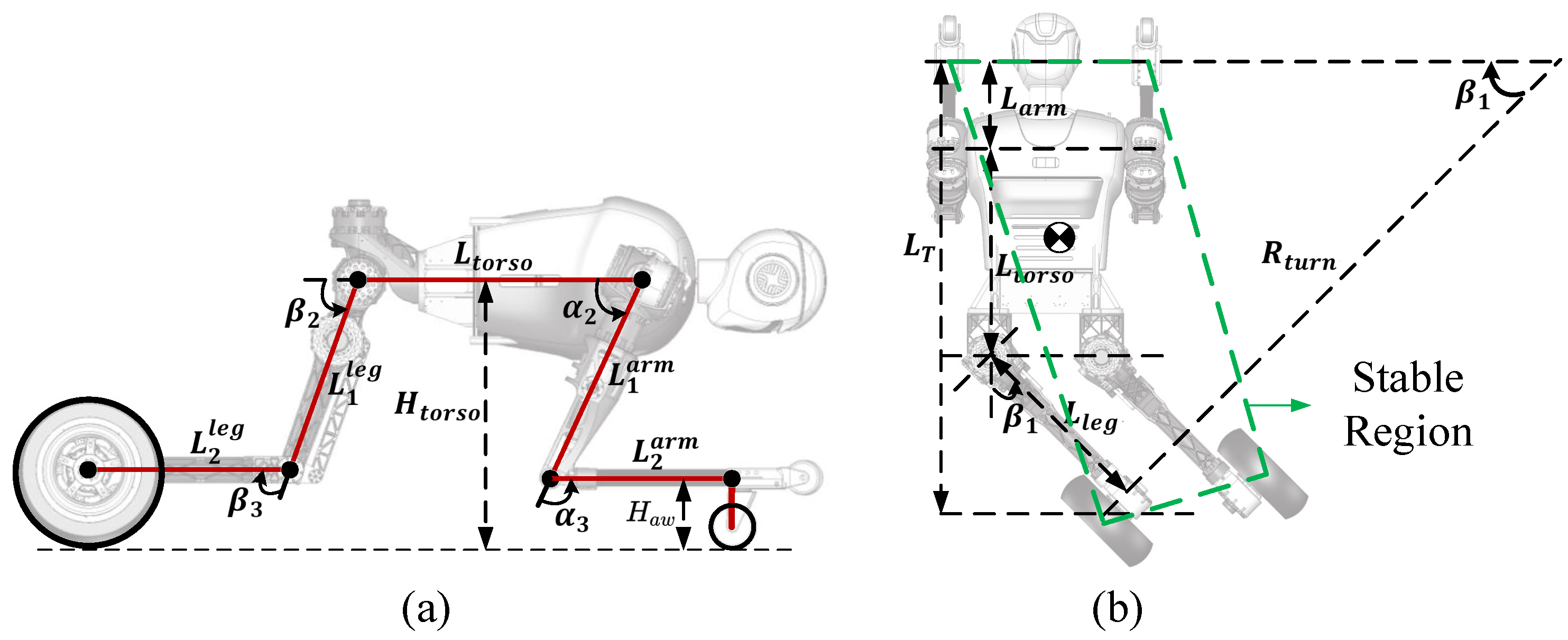
3.3.1. Crawling Motion Model
3.3.2. Crawling Motion Control
4. Modeling and Control of Mode Transition
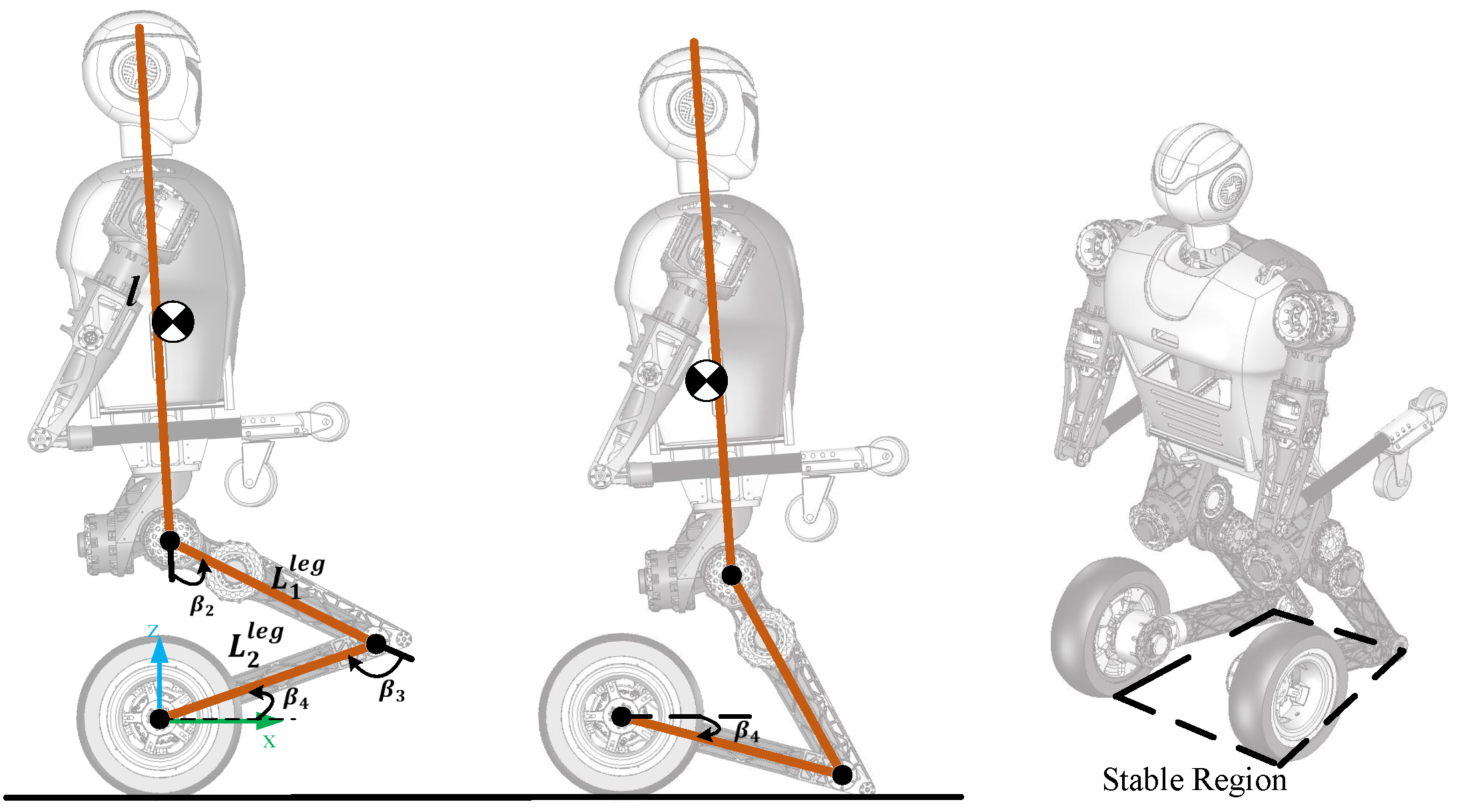
4.1. Modeling and Control of Kneeling
4.1.1. Kneeling Model
4.1.2. Kneeling Control
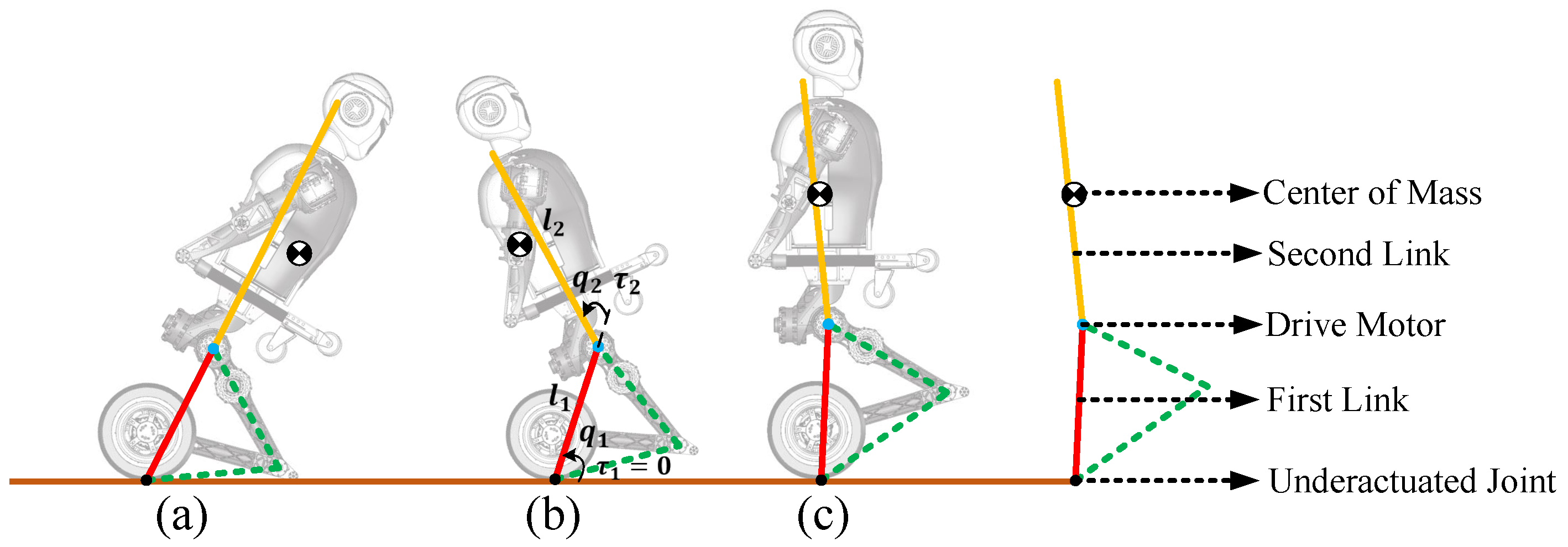
4.2. Modeling and Control of Standing Recovery
4.2.1. Standing Recovery Model
4.2.2. Standing Recovery Control
5. Experiments
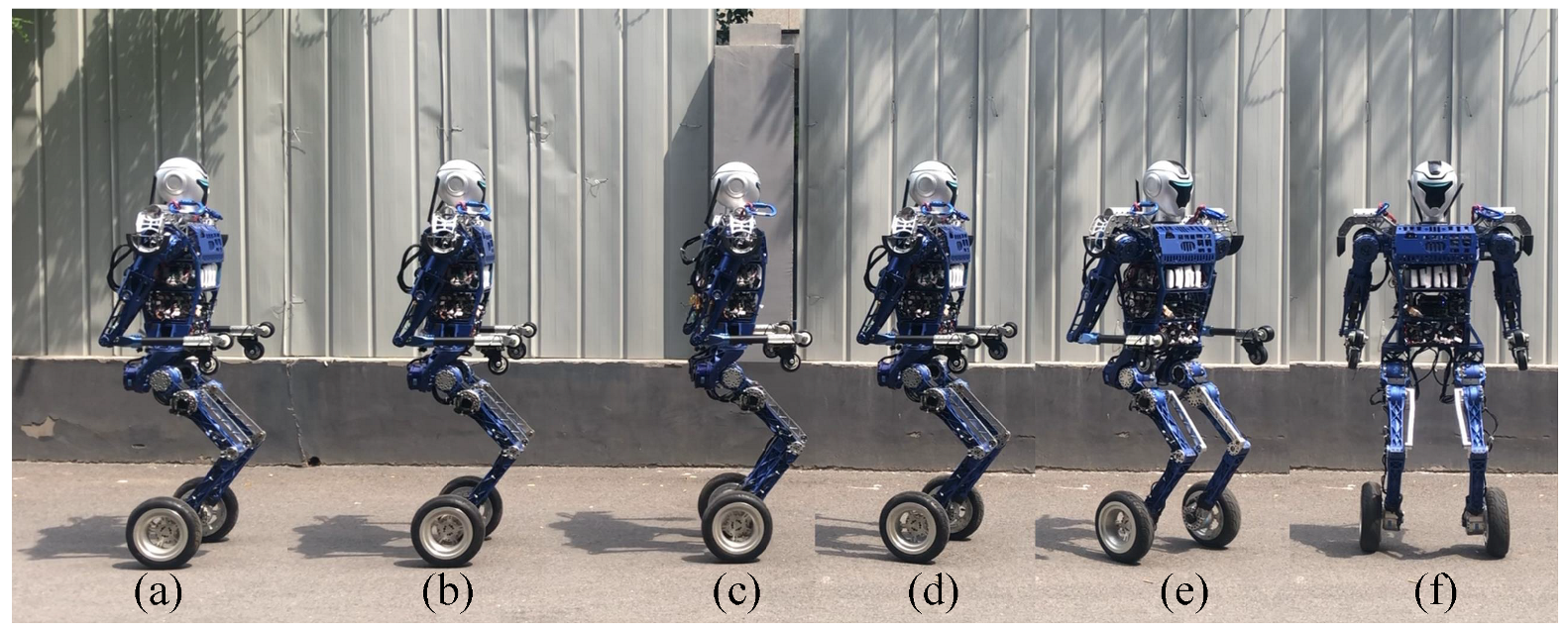
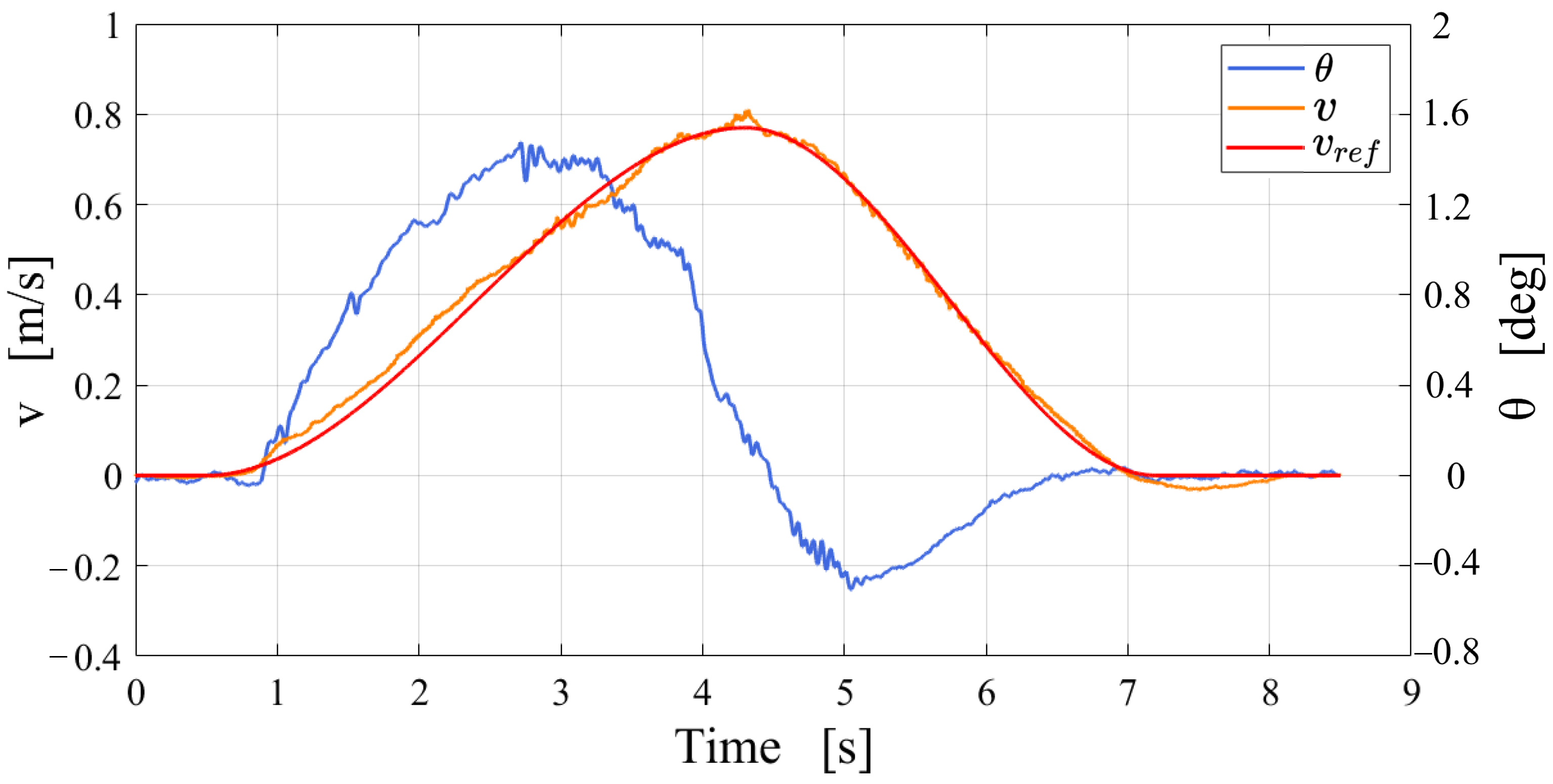
5.1. Upright Balanced Moving Experiment
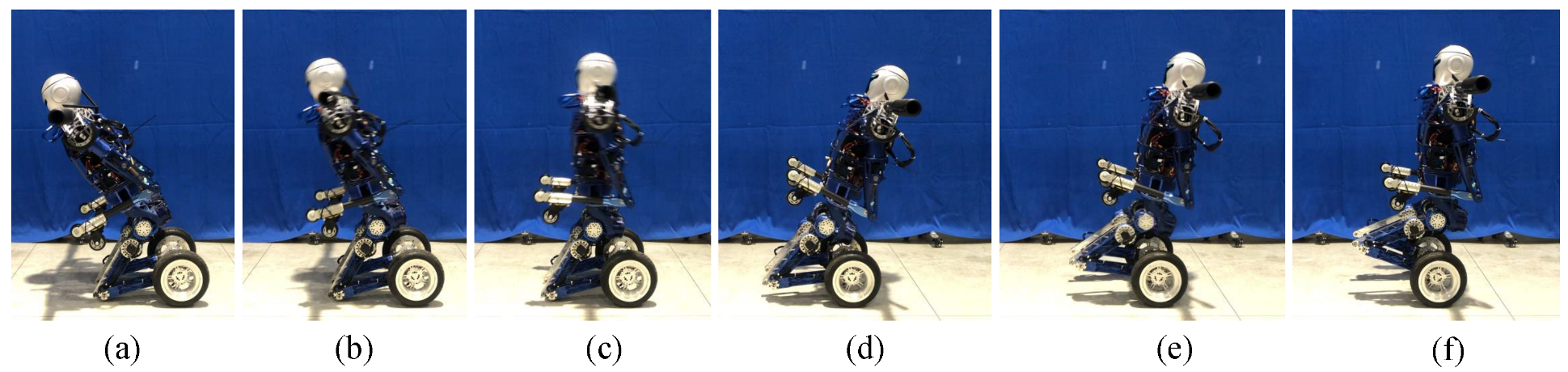
5.2. Crawling Experiment
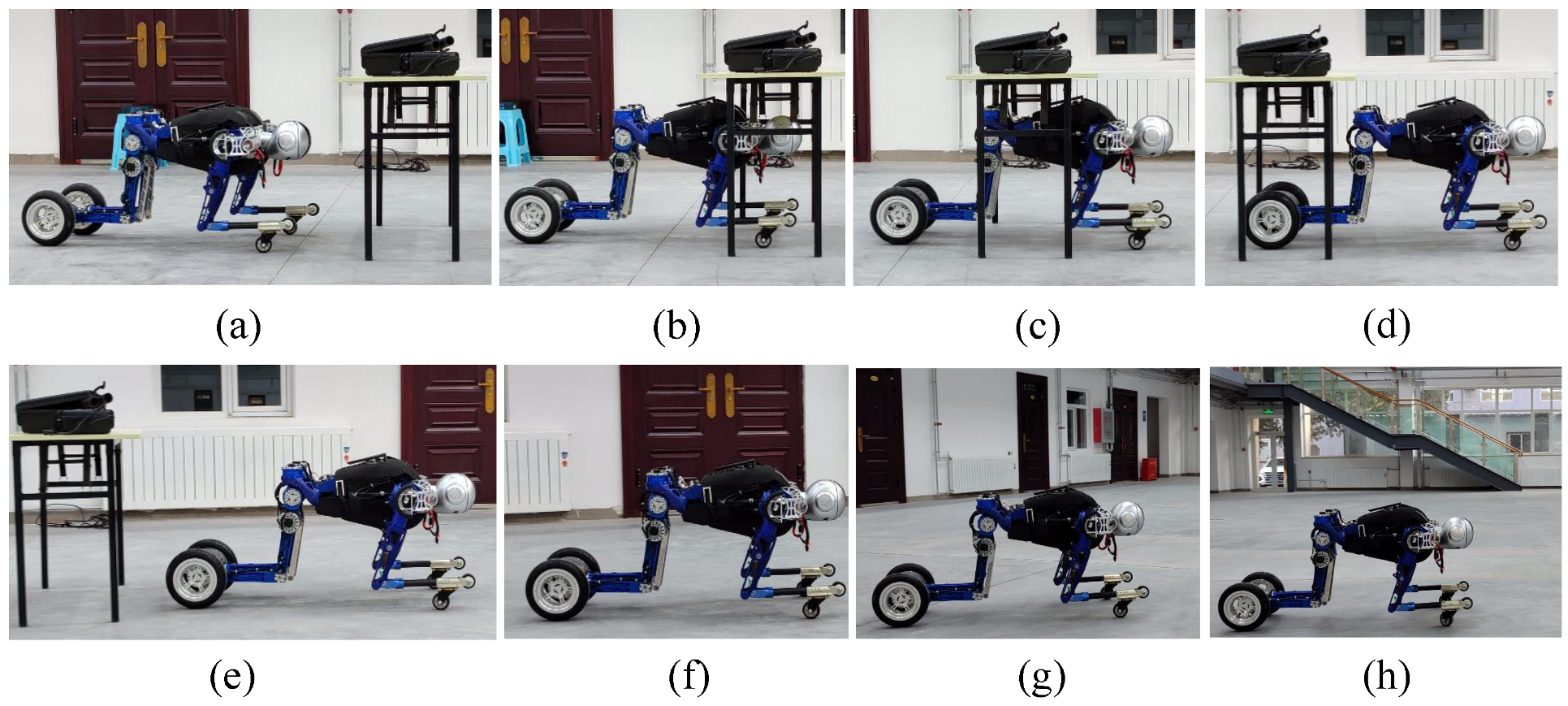
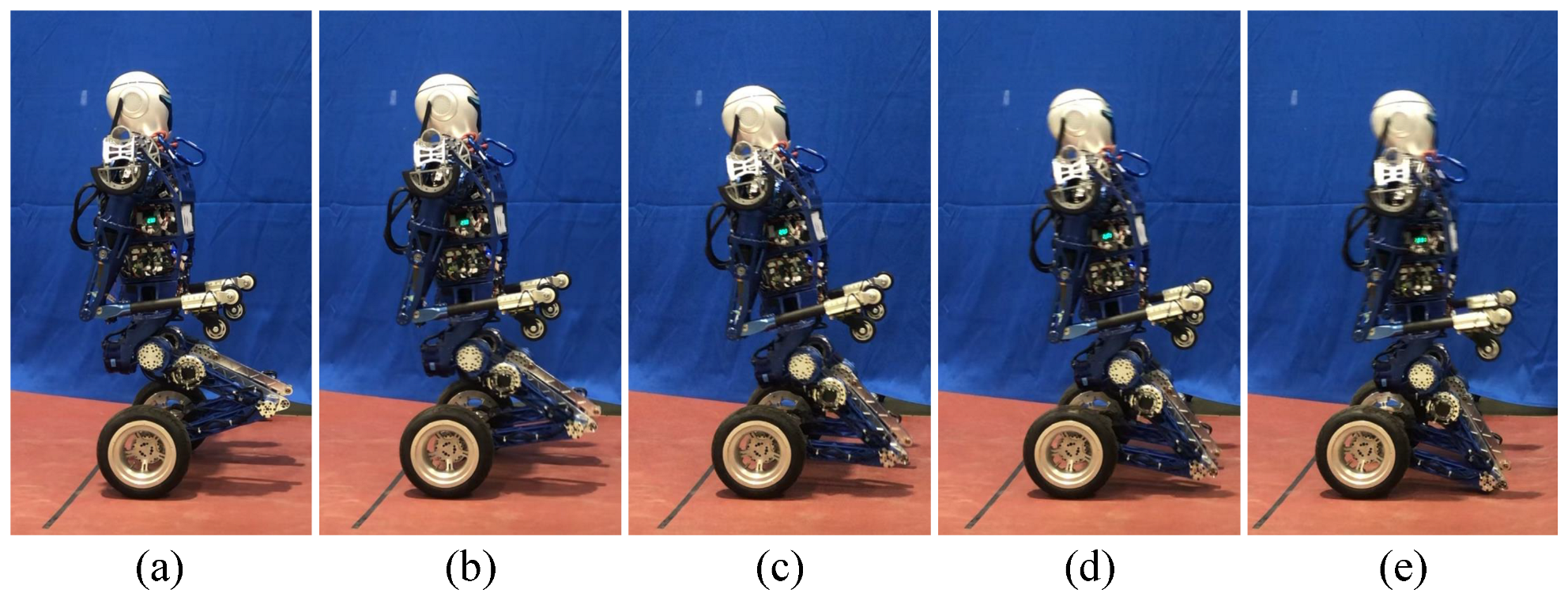
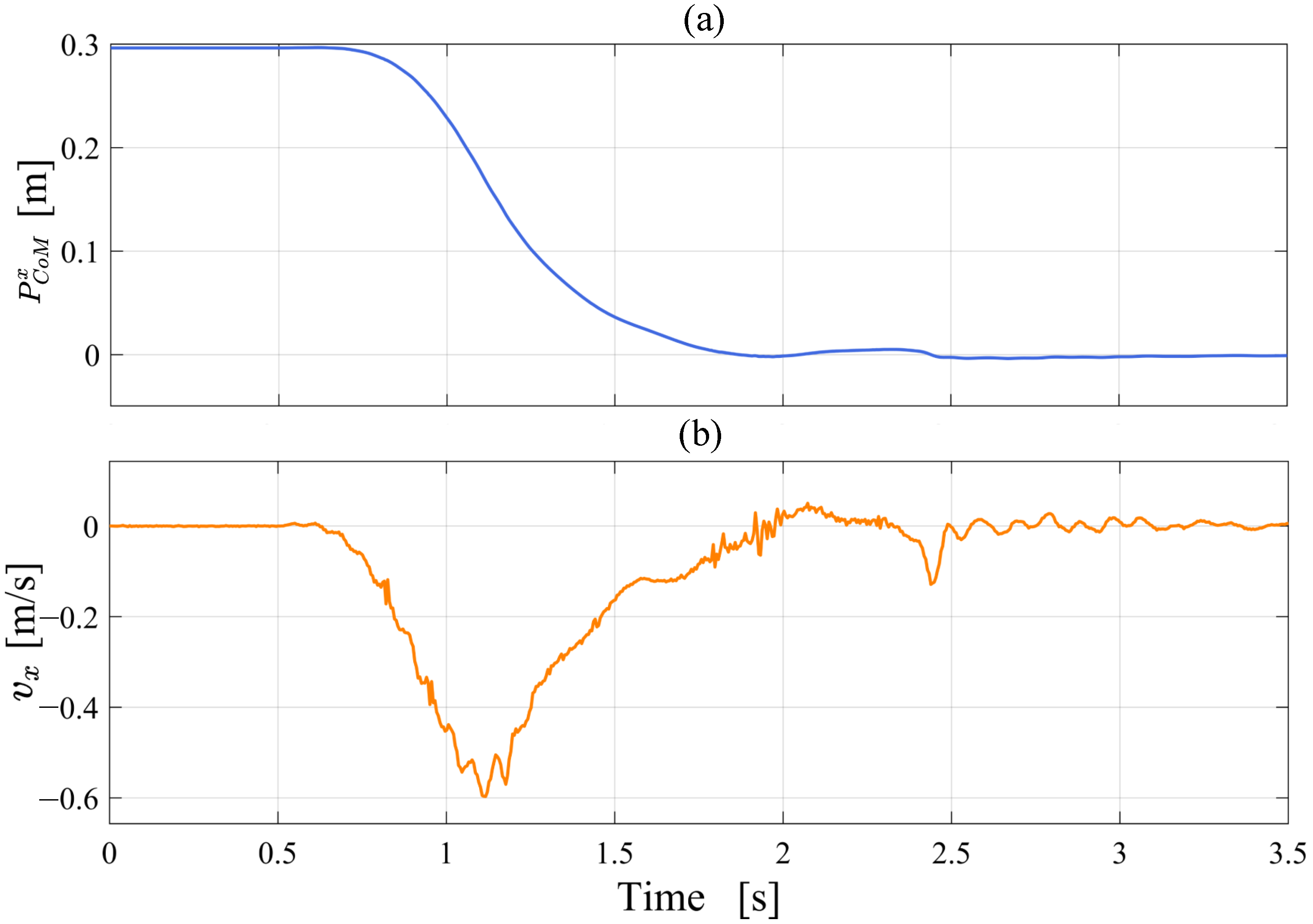
5.3. Kneeling Experiment
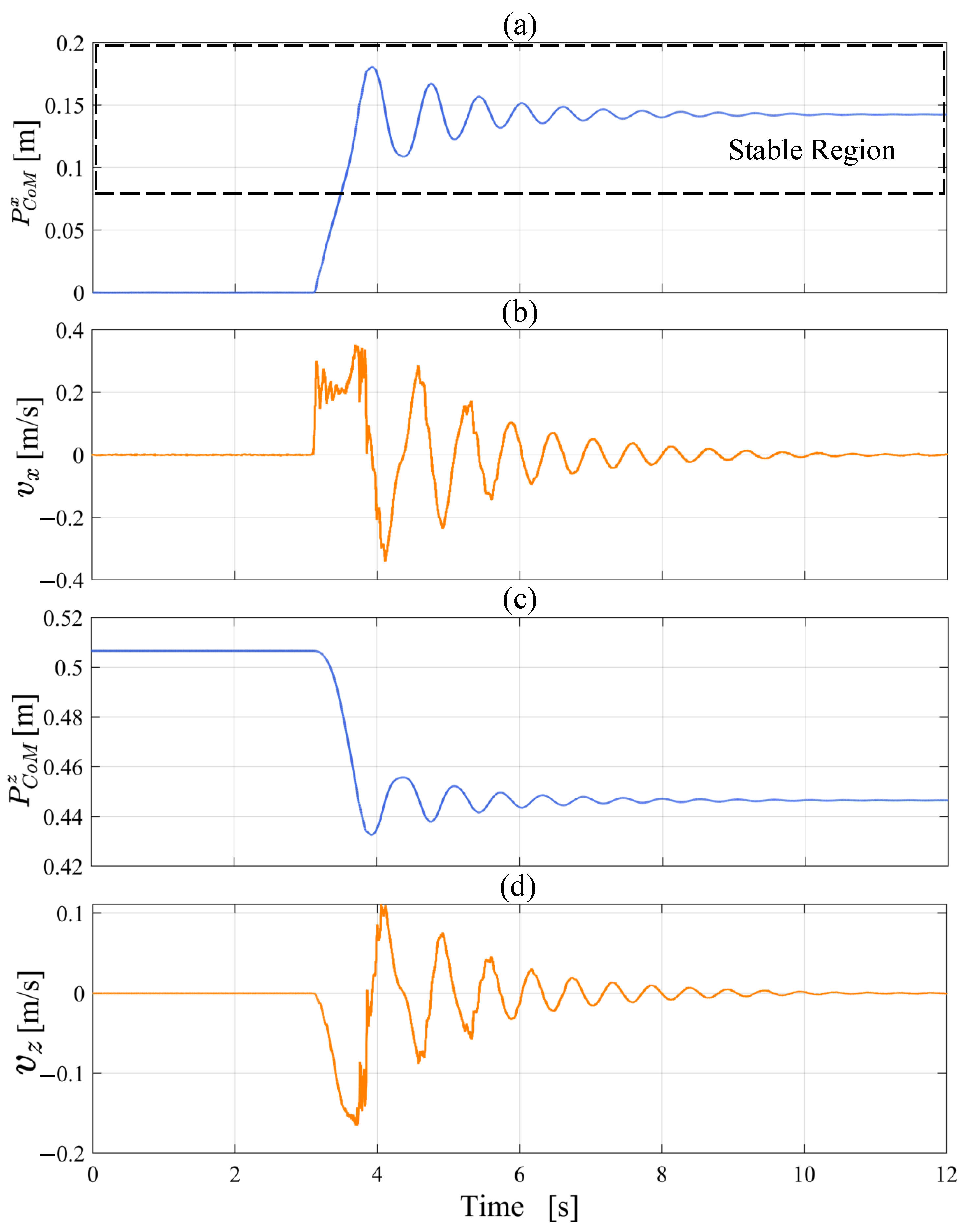
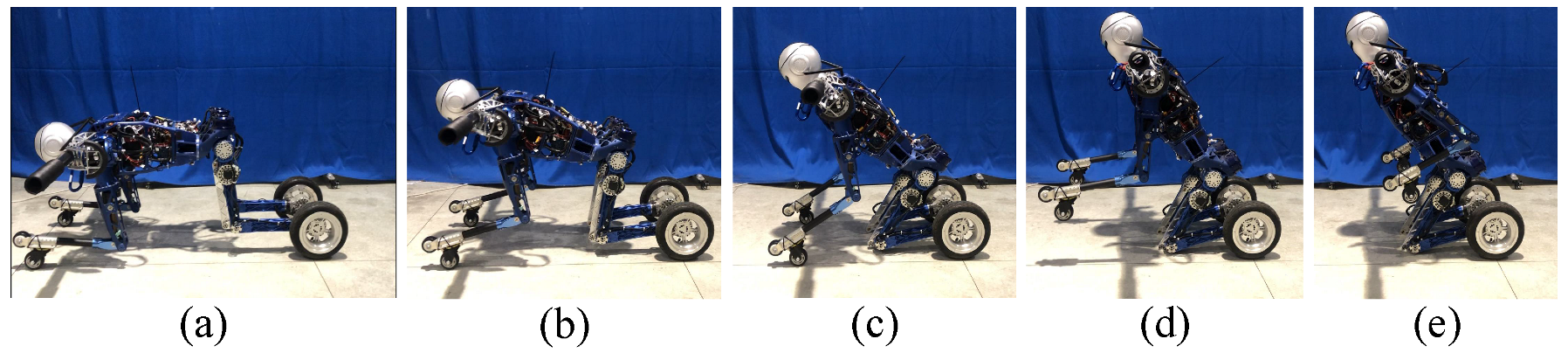
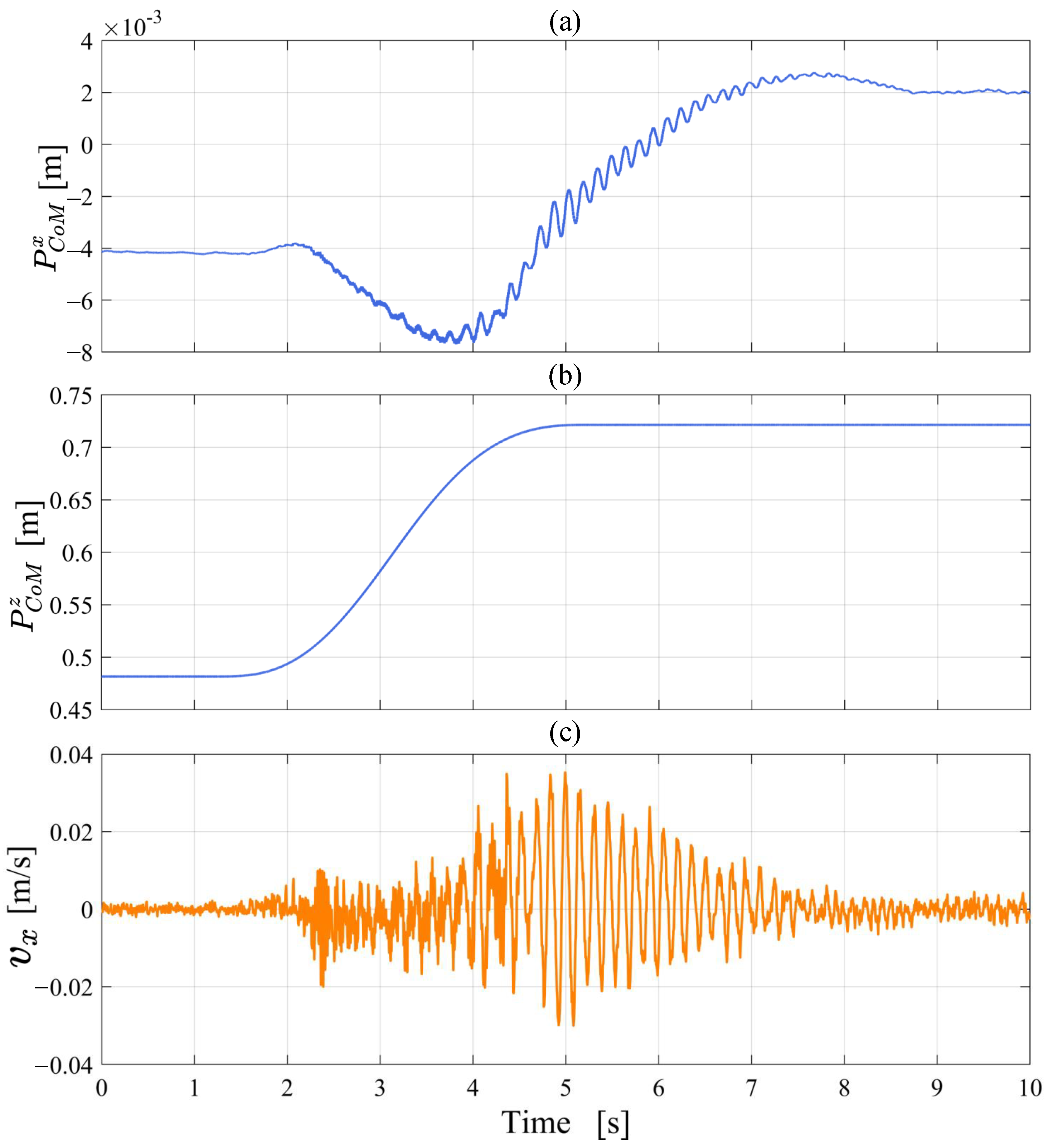
5.4. Standing Recovery Experiment
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| LQR | Linear Quadratic Regulator |
| DoF | Degrees of Freedom |
| QP | Quadratic Programming |
| CoM | Center of Mass |
| BIT | Beijing Institute of Technology |
| EtherCAT | Ether Control Automation Technology |
| IMU | Inertial Measurement Unit |
References
- Atlas. Available online: https://www.bostondynamics.com/atlas (accessed on 6 June 2022).
- Henze, B.; Roa, M.A.; Ott, C. Passivity-Based Whole-Body Balancing for Torque-Controlled Humanoid Robots in Multi-Contact Scenarios. Int. J. Robot. Res. 2016, 35, 1522–1543. [Google Scholar] [CrossRef]
- Henze, B.; Dietr, A.; Ott, C. An approach to combine balancing with hierarchical whole-body control for legged humanoid robots. IEEE Robot. Autom. Lett. 2016, 1, 700–707. [Google Scholar] [CrossRef]
- Kanoulas, D.; Lee, J.; Caldwell, D.G.; Tsagarakis, N.G. Center-of-mass-based grasp pose adaptation using 3d range and force/torque sensing. Int. J. Hum. Robot. 2018, 15, 1850013. [Google Scholar] [CrossRef] [Green Version]
- Gori, I.; Pattacini, U.; Tikhanoff, V.; Metta, G. Ranking the good points: A comprehensive method for humanoid robots to grasp unknown objects. In Proceedings of the 2013 IEEE International Conference on Advanced Robotics (ICAR), Montevideo, Uruguay, 25–29 November 2013; pp. 1–7. [Google Scholar] [CrossRef]
- Wang, Y.; Li, W.; Togo, S.; Yokoi, H.; Jiang, Y. Survey on Main Drive Methods Used in Humanoid Robotic Upper Limbs. Cyborg Bionic Syst. 2021, 2021, 9817487. [Google Scholar] [CrossRef]
- Namiki, A.; Yokosawa, S. Origami folding by multifingered hands with motion primitives. Cyborg Bionic Syst. 2021, 2021, 9851834. [Google Scholar] [CrossRef]
- Gong, Y.; Hartley, R.; Da, X.; Hereid, A.; Harib, O.; Huang, J.-K.; Grizzle, J. Feedback control of a cassie bipedal robot: Walking, standing, and riding a segway. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 4559–4566. [Google Scholar] [CrossRef] [Green Version]
- Li, Q.; Yu, Z.; Chen, X.; Zhou, Q.; Zhang, W.; Meng, L.; Huang, Q. Contact force/torque control based on viscoelastic model for stable bipedal walking on indefinite uneven terrain. IEEE Trans. Autom. Sci. Eng. 2019, 16, 1627–1639. [Google Scholar] [CrossRef]
- Dong, C.; Yu, Z.; Chen, X.; Chen, H.; Huang, Y.; Huang, Q. Adaptability control towards complex ground based on fuzzy logic for humanoid robots. IEEE Trans. Fuzzy Syst. 2022, 30, 1574–1584. [Google Scholar] [CrossRef]
- Klemm, V.; Morra, A.; Salzmann, C.; Tschopp, F.; Bodie, K.; Gulich, L.; Küng, N.; Mannhart, D.; Pfister, C.; Vierneisel, M. Ascento: A two-wheeled jumping robot. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal Convention Center, Montreal, QC, Canada, 20–24 May 2019; pp. 7515–7521. [Google Scholar] [CrossRef]
- Bjelonic, M.; Sankar, P.K.; Bellicoso, C.D.; Vallery, H.; Hutter, M. Rolling in the deep–hybrid locomotion for wheeled-legged robots using online trajectory optimization. IEEE Robot. Autom. Lett. 2020, 5, 3626–3633. [Google Scholar] [CrossRef] [Green Version]
- Klamt, T.; Behnke, S. Anytime hybrid driving-stepping locomotion planning. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 4444–4451. [Google Scholar] [CrossRef] [Green Version]
- Bjelonic, M.; Grandia, R.; Harley, O.; Galliard, C.; Zimmermann, S.; Hutter, M. Whole-body mpc and online gait sequence generation for wheeled-legged robots. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 8388–8395. [Google Scholar] [CrossRef]
- Wang, L.; Meng, L.; Kang, R.; Liu, B.; Gu, S.; Zhang, Z.; Meng, F.; Ming, A. Design and Dynamic Locomotion Control of Quadruped Robot with Perception-Less Terrain Adaptation. Cyborg Bionic Syst. 2022, 2022, 9816495. [Google Scholar] [CrossRef]
- Li, J.; Wang, J.; Peng, H.; Hu, Y.; Su, H. Fuzzy-torque approximation-enhanced sliding mode control for lateral stability of mobile robot. IEEE Trans. Syst. Man Cybern. Syst. 2021, 52, 2491–2500. [Google Scholar] [CrossRef]
- Kashiri, N.; Baccelliere, L.; Muratore, L.; Laurenzi, A.; Ren, Z.; Hoffman, E.M.; Kamedula, M.; Rigano, G.F.; Malzahn, J.; Cordasco, S.; et al. Centauro: A hybrid locomotion and high power resilient manipulation platform. IEEE Robot. Autom. Lett. 2019, 4, 1595–1602. [Google Scholar] [CrossRef]
- Wang, S.; Cui, L.; Zhang, J.; Lai, J.; Zhang, D.; Chen, K.; Zheng, Y.; Zhang, Z.; Jiang, Z.-P. Balance control of a novel wheel-legged robot: Design and experiments. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Sanya, China, 6–9 December 2021; pp. 6782–6788. [Google Scholar] [CrossRef]
- Cui, L.; Wang, S.; Zhang, J.; Zhang, D.; Lai, J.; Zheng, Y.; Zhang, Z.; Jiang, Z.-P. Learning-based balance control of wheel-legged robots. IEEE Robot. Autom. Lett. 2021, 6, 7667–7674. [Google Scholar] [CrossRef]
- Chen, H.; Wang, B.; Hong, Z.; Shen, C.; Wensing, P.M.; Zhang, W. Underactuated motion planning and control for jumping with wheeled-bipedal robots. IEEE Robot. Autom. Lett. 2020, 6, 747–754. [Google Scholar] [CrossRef]
- Xin, S.; Vijayakumar, S. Online dynamic motion planning and control for wheeled biped robots. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24–30 October 2020; pp. 3892–3899. [Google Scholar] [CrossRef]
- Handle. Available online: https://www.bostondynamics.com/handle (accessed on 6 June 2022).
- Klemm, V.; Morra, A.; Gulich, L.; Mannhart, D.; Rohr, D.; Kamel, M.; de Viragh, Y.; Siegwart, R. LQR-Assisted Whole-Body Control of a Wheeled Bipedal Robot With Kinematic Loops. IEEE Robot. Autom. Lett. 2020, 5, 3745–3752. [Google Scholar] [CrossRef]
- Zhou, H.; Li, X.; Feng, H.; Li, J.; Zhang, S.; Fu, Y. Model decoupling and control of the wheeled humanoid robot moving in sagittal plane. In Proceedings of the 2019 IEEE-RAS 19th International Conference on Humanoid Robots (Humanoids), Toronto, ON, Canada, 15–17 October 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Li, X.; Zhang, S.; Zhou, H.; Feng, H.; Fu, Y. Locomotion adaption for hydraulic humanoid wheel-legged robots over rough terrains. Int. J. Hum. Robot. 2021, 18, 2150001. [Google Scholar] [CrossRef]
- Li, X.; Zhou, H.; Feng, H.; Zhang, S.; Fu, Y. Design and experiments of a novel hydraulic wheel-legged robot (WLR). In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 3292–3297. [Google Scholar] [CrossRef]
- Zhao, L.; Yu, Z.; Chen, X.; Huang, G.; Wang, W.; Han, L.; Qiu, X.; Zhang, X.; Huang, Q. System design and balance control of a novel electrically-driven wheel-legged humanoid robot. In Proceedings of the 2021 IEEE International Conference on Unmanned Systems (ICUS), Beijing, China, 1–5 October 2021; pp. 742–747. [Google Scholar] [CrossRef]
- Oh, P.; Sohn, K.; Jang, G.; Jun, Y.; Cho, B.-K. Technical overview of team drc-hubo@ unlv’s approach to the 2015 darpa robotics challenge finals. J. Field Robot. 2017, 34, 874–896. [Google Scholar] [CrossRef]
- Hobo: [DRC 2015] Team KAIST Full Video. Available online: https://www.youtube.com/watch?v=PomkJ4l9CMU (accessed on 7 June 2022).
- Liu, T.; Zhang, C.; Wang, J.; Song, S.; Meng, M.Q.-H. Towards terrain adaptablity: In situ transformation of wheel-biped robots. IEEE Robot. Autom. Lett. 2022, 7, 3819–3826. [Google Scholar] [CrossRef]
- ANYmal. Available online: https://www.youtube.com/watch?v=kEdr0ARq48A (accessed on 7 June 2022).
- Vollenweider, E.; Bjelonic, M.; Klemm, V.; Rudin, N.; Lee, J.; Hutter, M. Advanced Skills through Multiple Adversarial Motion Priors in Reinforcement Learning. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23 October 2022. [Google Scholar] [CrossRef]
- Pathak, K.; Franch, J.; Agrawal, S.K. Velocity and position control of a wheeled inverted pendulum by partial feedback linearization. IEEE Trans. Robot. 2005, 21, 505–513. [Google Scholar] [CrossRef]
- Huang, J.; Guan, Z.-H.; Matsuno, T.; Fukuda, T.; Sekiyama, K. Sliding-mode velocity control of mobile-wheeled inverted-pendulum systems. IEEE Trans. Robot. 2010, 26, 750–758. [Google Scholar] [CrossRef]
- Zhou, Y.; Wang, Z.; Chung, K.-W. Turning motion control design of a two-wheeled inverted pendulum using curvature tracking and optimal control theory. J. Optim. Theory Appl. 2019, 181, 634–652. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Yang, C.; Fan, L. Advanced Control of Wheeled Inverted Pendulum Systems; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Li, Q.; Meng, F.; Yu, Z.; Chen, X.; Huang, Q. Dynamic torso compliance control for standing and walking balance of position-controlled humanoid robots. IEEE/ASME Trans. Mechatron. 2021, 26, 679–688. [Google Scholar] [CrossRef]
- Joint Japanese-French Robotics Laboratory “Eigen-QuadProg”. Available online: https://github.com/jrl-umi3218/eigen-quadprog (accessed on 12 June 2022).





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Joint | Angle Range (deg.) |
|---|---|
| Shoulder pitch | −90, +90 |
| Shoulder roll | 0, +80 |
| Elbow pitch | +30, +150 |
| Hip pitch | −90, +30 |
| Hip roll | −20, +60 |
| Knee pitch | 0, +135 |
| Symbol | Parameter Name | Value |
|---|---|---|
| Mass of the body | 51.5 kg | |
| Mass of the wheel | 1.75 kg | |
| Radius of the wheel | 127 mm | |
| Length of the thigh | 350 mm | |
| Length of the calf | 350 mm | |
| l | Length of the upper body | 780 mm |
| Distance between two wheels | 328 mm | |
| Moment of inertia of wheel | 0.0142 kg·m2 | |
| h | Height of CoM | - |
| Reference height of CoM | - | |
| Moment of inertia of body around y-axis | - | |
| Moment of inertia of body around z-axis | - | |
| v | Forward velocity | - |
| Reference forward velocity | - | |
| Velocity compensation for turning | - | |
| Rotation speed of left wheel | - | |
| Rotation speed of right wheel | - |
| Symbol | Parameter Name | Value |
|---|---|---|
| Length of the upper arm | 400 mm | |
| Length of the forearm | 320 mm | |
| Length of the thigh | 350 mm | |
| Length of the calf | 350 mm | |
| Length of the torso | 500 mm | |
| Height from ground to wrist | 110 mm | |
| Height of the torso | - | |
| Radius of turning | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiu, X.; Yu, Z.; Meng, L.; Chen, X.; Zhao, L.; Huang, G.; Meng, F. Upright and Crawling Locomotion and Its Transition for a Wheel-Legged Robot. Micromachines 2022, 13, 1252. https://doi.org/10.3390/mi13081252
Qiu X, Yu Z, Meng L, Chen X, Zhao L, Huang G, Meng F. Upright and Crawling Locomotion and Its Transition for a Wheel-Legged Robot. Micromachines. 2022; 13(8):1252. https://doi.org/10.3390/mi13081252
Chicago/Turabian StyleQiu, Xuejian, Zhangguo Yu, Libo Meng, Xuechao Chen, Lingxuan Zhao, Gao Huang, and Fei Meng. 2022. "Upright and Crawling Locomotion and Its Transition for a Wheel-Legged Robot" Micromachines 13, no. 8: 1252. https://doi.org/10.3390/mi13081252